Embed Size (px)
Citation preview

SINTEF RFI ACTIVITIESJune 2019, Helsinki
Aiden Morrison, Nadia Sokolova

• Brief SINTEF Introduction
• Our motivations for pursuing RFI monitoring
• Past projects covering GNSS interference
• Lessons learned, and knowledge gaps
• Ongoing activities, and upcoming monitoring hardware
2
Outline

3

4
GBAS RFI Monitoring
GNSS for ITS
Indoor Navigation
Custom Navigation HW System Design
Image sources: [3]
Autonomous system Navigation
Navigation Focused Research Areas

• While all GNSS applications are vulnerable to RFI, some have higher potential losses
• If my phone loses GNSS due to RFI, I might be slightly inconvenienced
• If our drone loses GNSS due to RFI, we might lose a very expensive drone or crash in to important infrastructure
• Example of an economic impact
• Some applications have higher risks
5
Our motivation for pursuing RFI monitoring

6
GBAS - Ground Based Augmentation System
Concept of operation:
• Similar to differential GNSS but with extras
• Corrections and safety flags are carried from the ground to the aircraft via a dedicated VHF link called VDB
• There are typically four ground stations which allow for much more sensitive monitoring for outliers and errors
• But the system is very sensitive to signal degradation from RFI
CAT III GBAS-based Automatic Landing

7
Precision Approach Requirements
• Category type identifies system capability, indicating the minimum approach height that can be achieved.
• Hitting these performance metrics is hard under ideal conditions. • If weak RFI is present on even one of the four antennas it can reduce availability and continuity• Stronger RFI is an immediate problem – there are several recent examples
GBAS Precision Operation CAT l CAT ll CAT lllAccuracy [m]
95 %
Horizontal 16.0 6.9 6.1Vertical 7.7 2.0 2.0
Integrity
Time-to-Alert [s]
3 22
Alert Limit [m]H: 40
V: 10-15
H: 17.3
V: 5.3
H: 15.5
V: 5.3PHMI / approach 2x10-5 2x10-9 2x10-9
Continuity Failure Rate5x10-5 / approach
5x10-6 / 15 sec10-7 / 15 sec
Availability 0.99 – 0.99999 0.99 – 0.99999 0.99 – 0.99999

8
GBAS and other aircraft events (plus a fancy boat)

• From the point of view of GBAS, we need to know a few pieces of information about RFI
• 1) The occurrence rate
• 2) The relative occurrence rate
• Future GBAS systems are intended to use both the L1/E1 and L5/E5a bands on GPS and Galileo
• In the event of RFI on a single frequency it may be possible to fall back to operation using only the other
• 3) Power levels
• 4) Spectral occupancy
• Unintentionally generated tones are mitigated by the signals themselves
• It may be possible to identify individual emitters over differing events and positions
• Unfortunately real-time analysis at this level can be computationally expensive
• Instead, we take an alternative approach
9
What we need to know

• RFI detection concept – how to detect RFI with minimal processing power?
• It’s not feasible to analyze all signals in real time in terms of C/N0 – that would require a full multifrequency GNSS
receiver and wouldn’t provide us a bitstream for our SDR
• Instead we look for in band power level deviation
• Must allow for site to site variation and slow variability due to thermal effects etc. But rapid increases in power are strong indicators of RFI
• Weak events visible
• Strong events up to -10dBm
• Example of car-borne jammer events10
Event detection - 1

Event detection - 2
• Mobile Jammer
• Cigarette lighter style
• 'Stepped CW' signal
• Car drove within 10 m
• Test conducted with NKOM and FFI
• Other monitors deployed
• Indra Navia, DFS, NLR, ESTEC
• The monitor at ESTEC triggered frequently on adjacent band pulsed power sources (See Event 000)
• Also caught a delivery truck or taxi with a jammer
• Event 008 is a jamming event
• GNSS satellites cannot be tracked in L1 band for duration
• There are Drawbacks to this approach
11

• Three major factors motivated the design of a second generation monitoring system
• The Manual result collection and analysis required a large amount of user intervention
• Far too many "false alarms"
• E5b, L2, G2, E6, E1PRS, and G1 not collected/analyzed
• These signals all have slightly different characteristics making them more or less suitable to different use cases
• Let’s see what this coverage looks like on a signal map
12
Lessons learned & Knowledge gaps

• A chart is helpful:
• Ignoring the S-band signals, this chart shows the L-band
• Signal plans evolve over time
• Uncertain if the GLONASS CDMA plans are still accurate
• Most of these signals are now turned on and ’healthy’
• The rise of RFI
• As GNSS has risen to solve more and more problems, it has become a larger target
• People are right to be paranoid about being tracked, but jamming GNSS is hazardous
• If usage based road tolling depends on GNSS it will become a target
• This is why we need a radically different front-end
• From 2x24 MHz to 4 x 55 MHz
• This is a nearly 5x increase in the amount of data
• For reasons we will cover later we also want to go from 1 bit to 4 bit
• 4x again so ~20x the data relative to the first system
• A higher dynamic range is also desirable13
RF signal background - 3 of 3

• Our design needs to tolerate 6 or 7 orders of magnitude
• (Images from wikipedia, Nuand, and Maxim)
• 60-70dB+ dynamic range
• Each bit of ADC range represents 3dB of amplitude dynamic range, 6dB of power
• Each bit of ADC range takes up more data whether or not the signal is using these bits
• Therefore – it’s inefficient to throw bits at the problem outside of processing applications that need or benefit from having a wide dynamic range signal
• E.g. Novatel 7 series receivers have 8 bit quantization but only turn it on when requested for RFI mitigation, otherwise they use 4 bits to save energy
• Instead we need to employ what is called ’gain control’ to feed back from the digitized signal to the analog gain levels
• Dynamic range considerations map back to every stage of the design
• IP3 etc. Of first gain stage
• Maximum power handling of components (SAWs and LNA)
• Representation range of the ADCs
• Gain Control and feedback to use a VGA
• The MAX2120 mixer chip includes a VGA with a 70 dB analog linear range
• Also 15dB of digital control range at the baseband, for a combined 85dB
• Probably not feasible to use the full range, but still a good start
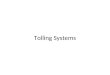
• System block diagram14
Quantization concepts and requirements - 3 of 3

15
• System automation, and updated hardware capabilities
Hardware: Reconfigurable multiband front-end.
Cloud Storage, Archiving and Retrieval
Hardware: Embedded computer module (COTS)
Software: Online monitoring, analysis and
notification. Periodic archiving and reporting.
Power In (<90W)
GNSS Antenna
USB3
Ethernet
Notifications(e.g. Email)
User configuration options
USB3LNA,
Splitter
SAW, E1/L1/G1
SAW, E5/L2/E6
LNA, Splitter
LNA, Splitters
RF Power Meter A
RF Power Meter B
VGA, Mixer, LPF 1
VGA, Mixer, LPF 2
VGA, Mixer, LPF 3
VGA, Mixer, LPF 4
8x ADC FPGAUSB3 FIFO
OCXO,Clocking
Other Low Level Interfaces
RF via USB3
Other Low LevelInterfaces to FPGA
i.MX8SOM
-
Detection, and pre-
processingsoftware
PCIe to SATA2 IC
PCIe SATA2SATA2
SSD
Keyboard/Mouse(USB2)
Monitor (HDMI) EthernetInterface
RGMIINotifications(e.g. Email)
Raw and processed data
Indicator LEDs, and Buttons
Design Evolution - Concept

• First version powered up and ran code
• Now in the process of implementing firmware
• Why not just buy an off-the-shelf front-end?
• A few small reasons
• 1) None have integrated power level measurement for environment
characterization and triggering
• 2) Onboard oscillator and clock generators need to be low phase noise
components for GNSS signals
• 3) GNSS Pre-filtering /Sensitivity to adjacent band signals:
• Front-ends like HackRF, bladeRF, and LimeSDR focus on wide bandwidth
• This makes sensitive pre-triggering difficult and pushes up false alarm rates
• 4) Many off the shelf solutions use fractional-N PLLs in their mixers
• Can introduce large residual code-carrier divergence
• Deployment plans...16
Design Evolution - Hardware

• Multiple locations in Norway and Europe (e.g. research
facilities at ESTEC and NLR).
• Several sites to be operated by the Norwegian Public
Roads Administration. SINTEF monitors will be co-
located with monitoring equipment deployed by Nkom.
17
Deployment plans
Patterødkrysset(Busiest intersection in Norway)
E8 Kilpisjärvi-SkibotnRoad used for autonomous testing

• Starting next year we hope to have phased array based RFI detectors which provide bearing
information to the host system
• These will be tested for drones based detection and tracking of GNSS RFI sources
• I want the drones to be able to ’remove’ the source, but unlikely to get HMS approval
18
Future activities

• If GNSS based road pricing is adoped there will very likely be a large spike in RFI events
• It produces a financial incentive
• It will be necessary to have a comittment to both prevention and response
• Prevent jamming equipment from entering the country
• The credible ability to rapidly detect and localize jamming
19
Policy outlook

Teknologi for et bedre samfunn