Embed Size (px)
Citation preview

1
Sistemi lineariSistemi lineari quadrati

Paaina 2Sistemi lineari
2
Definizione e caratteristiche di sistema quadrato Definizione e caratteristiche di sistema quadrato (1/3)(1/3)
(continua)(continua)
Dati una matrice quadrata A(n××××n) ed un vettore (colonna) b ad n componenti;Determiniamo x in modo tale che:
Questa relazione di uguaglianza è un'equazione equazione vettoriale vettoriale nell’incognita x. Un vettore che la soddisfa è una soluzionesoluzione dell'equazione.
Ax = b
L’uguaglianza è:
•Un’equazione perché è vera solo per certi valori del vettore x;
•Vettoriale perché i due membri (a sinistra e a destra del segno “=”) sono due vettori.

Paaina 3Sistemi lineari
3
Definizione e caratteristiche di sistema quadrato Definizione e caratteristiche di sistema quadrato (2/3)(2/3)
(continua)(continua)
Riscriviamo l'equazione vettoriale Ax=b come segue:
������������������������
����
����
������������������������
����
����
====
������������������������
����
����
������������������������
����
����
������������������������
����
����
������������������������
����
����
nnnnnn
n
n
b
...
b
b
x
...
x
x
a...aa
............
a...aa
a...aa
2
1
2
1
21
22221
11211
Quest'unica equazione vettoriale è equivalente a n equazioni scalari...
Paaina 4Sistemi lineari
4
Definizione e caratteristiche di sistema quadrato Definizione e caratteristiche di sistema quadrato (3/3)(3/3)
������������
����
������������
====++++++++++++
====++++++++++++
====++++++++++++
nnnnnn
nn
nn
bxa...xaxa
............
bxa...xaxa
bxa...xaxa
2211
22222121
11212111
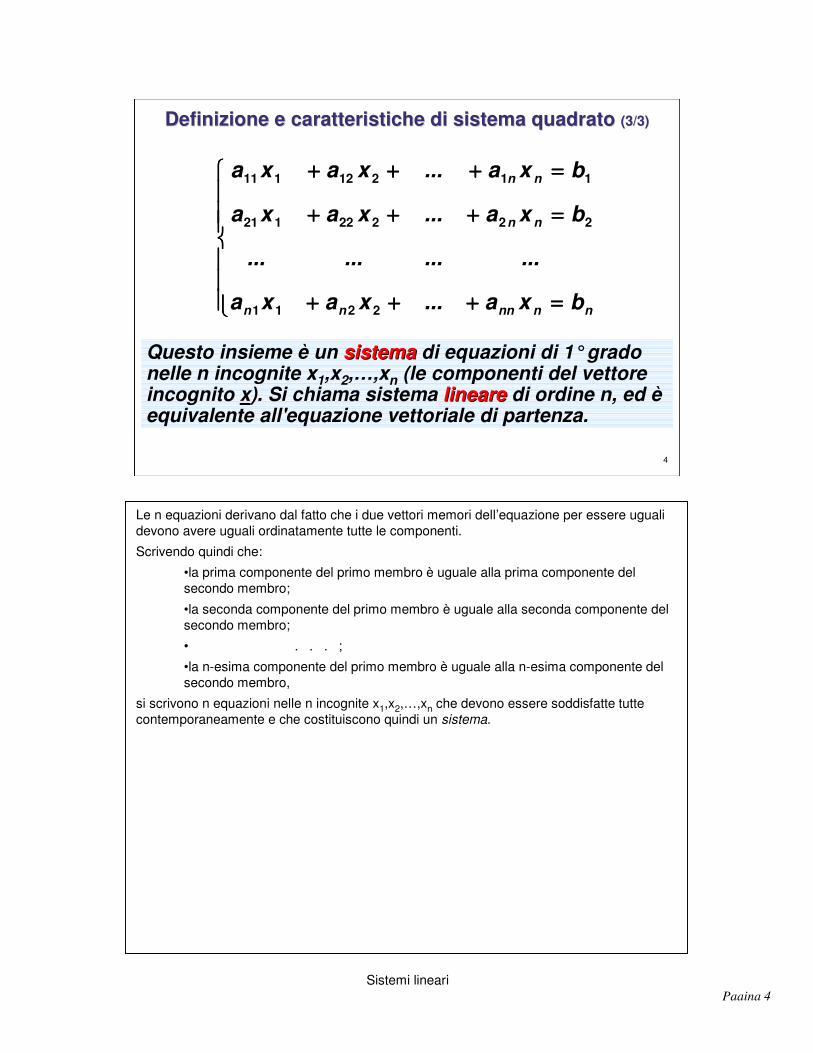
Questo insieme è un sistemasistema di equazioni di 1° grado nelle n incognite x1,x2,…,xn (le componenti del vettore incognito x). Si chiama sistema lineare lineare di ordine n, ed è equivalente all'equazione vettoriale di partenza.
Le n equazioni derivano dal fatto che i due vettori memori dell’equazione per essere uguali devono avere uguali ordinatamente tutte le componenti.
Scrivendo quindi che:
•la prima componente del primo membro è uguale alla prima componente del secondo membro;
•la seconda componente del primo membro è uguale alla seconda componente del secondo membro;
• . . . ;
•la n-esima componente del primo membro è uguale alla n-esima componente del secondo membro,
si scrivono n equazioni nelle n incognite x1,x2,…,xn che devono essere soddisfatte tutte contemporaneamente e che costituiscono quindi un sistema.

Paaina 5Sistemi lineari
5
Carattere e soluzione di un sistema lineareCarattere e soluzione di un sistema lineare
������������
����
������������
====++++++++++++
====++++++++++++
====++++++++++++
nnnnnn
nn
nn
bxa...xaxa
............
bxa...xaxa
bxa...xaxa
2211
22222121
11212111
Un sistema lineare può essere:
������������
����
������������
====++++++++++++
====++++++++++++
====++++++++++++
nnnnnn
nn
nn
bxa...xaxa
............
bxa...xaxa
bxa...xaxa
2211
22222121
11212111
••univocamente determinatounivocamente determinato se ammette una e una sola soluzione;••indeterminatoindeterminato se ammette infinite soluzioni;••impossibileimpossibile se non ammette soluzioni.
Ricordiamo che una soluzione del sistema è un vettore.

Paaina 6Sistemi lineari
6
Algoritmi di risoluzione di sistemi lineariAlgoritmi di risoluzione di sistemi lineari
Un sistema lineare è un classico e semplice modello numerico sul quale sono strutturabili altrettanto classici algoritmi: per esempio l’algoritmo di Cramer. Tuttavia l’enorme numero di conti che tali algoritmi prevedono spinge alla ricerca di algoritmi molto più efficienti.
L’algoritmo di Cramer fornisce la seguente soluzione:
xi = det(Ai)/det(A) i = 1,2,…,n
dove:
A è la matrice dei coefficienti
Ai è la matrice dei coefficienti in cui la i-esima colonna è sostituita dal vettore dei termini noti.
Questo algoritmo ha un peso computazionale elevato (usando ad esempio la regola di Laplace ogni determinante richiede un numero di operazioni proporzionale a (2n+1)!. Anche con algoritmi più efficienti il calcolo dei determinanti di grandi matrici risulta troppo oneroso). Inoltre non fornisce informazioni sul sistema se A è singolare (e quindi il sistema non è univocamente determinato).
Per questi motivi non viene quasi mai usato, se non per piccoli sistemi determinati.

Paaina 7Sistemi lineari
7
Caso particolare: osservazione Caso particolare: osservazione (1/3)(1/3)
��������
����
============
3333
2222
1111
bxabxabxa
Se un sistema lineare (ad esempio 3x3) si trovasse nella seguente forma:
avremmo immediata possibilità di verificarne il carattere e di trovarne la soluzione.
��������
����
============
3333
2222
1111
abxabxabx
///
Infatti il sistema si riduce al seguente sistema equivalente:
(continua)(continua)

Paaina 8Sistemi lineari
8
Caso particolare: osservazione Caso particolare: osservazione (2/3)(2/3)
che in forma matriciale si può scrivere:
Ax=b ����������������
����
����
������������
����
����
====������������
����
����
������������
����
����
������������
����
����
������������
����
����
333
222
111
3
2
1
ababab
xxx
100010001
///
e che ammette come unica soluzione il vettore:
������������
����
����
������������
����
����
333
222
111
ababab
///
(continua)(continua)
Paaina 9Sistemi lineari
9
Caso particolare: osservazione Caso particolare: osservazione (3/3)(3/3)
��������
����
============
3333
2222
1111
bxabxabxa
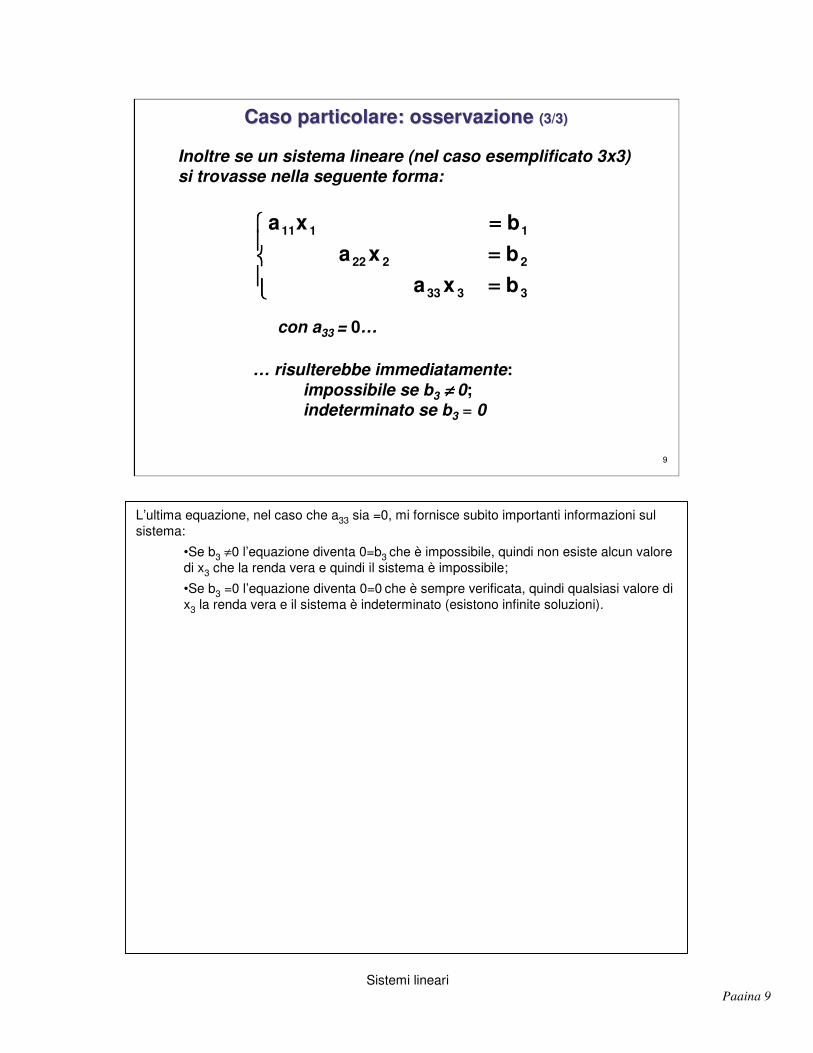
Inoltre se un sistema lineare (nel caso esemplificato 3x3) si trovasse nella seguente forma:
con a33 = 0…
… risulterebbe immediatamente:impossibile se b3 ≠ ≠ ≠ ≠ 0;indeterminato se b3 = 0
L’ultima equazione, nel caso che a33 sia =0, mi fornisce subito importanti informazioni sul sistema:
•Se b3 ≠0 l’equazione diventa 0=b3 che è impossibile, quindi non esiste alcun valore di x3 che la renda vera e quindi il sistema è impossibile;
•Se b3 =0 l’equazione diventa 0=0 che è sempre verificata, quindi qualsiasi valore di x3 la renda vera e il sistema è indeterminato (esistono infinite soluzioni).

Paaina 10Sistemi lineari
10
Risoluzione mediante diagonalizzazioneRisoluzione mediante diagonalizzazione
Dalle considerazioni appena fatte segue che:
“Un generico sistema lineare, soprattutto se di ordine elevato, viene analizzato e risolto preferibilmente con un particolare metodo di sostituzione che determina, se possibile, un sistema equivalenteequivalente con matrice dei coefficienti matrice dei coefficienti diagonalediagonale.”
L’algoritmo di seguito presentato ha caratteristiche di efficienza sia in termini di stabilità che in termini di costo.È, in tal senso, competitivo con ogni altro algoritmo classico.
L’algoritmo di diagonalizzazione tende a sostituire il sistema dato con un sistema equivalente a matrice diagonale, simile a quello della figura precedente.

11
Algoritmo di diagonalizzazione

Paaina 12Sistemi lineari
12
Principi di equivalenza dei sistemi lineari Principi di equivalenza dei sistemi lineari
Principi di equivalenza:
������������
����
������������
====++++++++++++
====++++++++++++
====++++++++++++
nnnnnn
nn
nn
bxa...xaxa
............
bxa...xaxa
bxa...xaxa
2211
22222121
11212111
•un’equazione può essere moltiplicata per una costante (≠≠≠≠0)
•due equazioni possono essere scambiate fra loro
•un’equazione può essere sostituita dalla combinazione lineare di se stessa e di un’altra equazione

Paaina 13Sistemi lineari
13
Algoritmo di diagonalizzazione: esempio 1 Algoritmo di diagonalizzazione: esempio 1 (1/8)(1/8)
������������
��������
−−−−====++++
====++++++++−−−−
====++++++++
1
222
12
31
321
321
xx
xxx
xxx
Alcune equazioni vengono sostituite da altre equazioni, rispettando i principi di equivalenzaprincipi di equivalenza. Si ottiene così un sistema equivalente a quello dato (ha le stesse soluzioni) ma la cui matrice è diagonale.
(continua)(continua)

Paaina 14Sistemi lineari
14
Algoritmo di diagonalizzazione: esempio 1 Algoritmo di diagonalizzazione: esempio 1 (2/8)(2/8)
10x
(continua)(continua)
��������
����
−−−−====++++====++++++++−−−−====++++++++
1xx2xx2x21xxx2
31
321
321
��������
����
−−−−====++++
====++++++++
1
12
31
321
xx
xxx
2x3++++ 32x++++ 3====
sostituisco la 2a
equazione con la somma:(1a equazione)××××(-a21/a11)+2a equazione
1====

Paaina 15Sistemi lineari
15
Algoritmo di diagonalizzazione: esempio 1 Algoritmo di diagonalizzazione: esempio 1 (3/8)(3/8)
(continua)(continua)
��������
����
��������
−−−−====++++
====++++
====++++++++
1
323
12
31
32
321
xx
xx
xxxsostituisco la 3a equazione con la somma:(1a equazione)××××(-a31/a11)+3a equazione
-1 21
21−−−−====
��������
����
��������
====++++
====++++++++
323
12
32
321
xx
xxx
1122
x)( ++++−−−− 221 x−−−− 31
21 x)( ++++−−−−++++
23−−−−====

Paaina 16Sistemi lineari
16
Algoritmo di diagonalizzazione: esempio 1 Algoritmo di diagonalizzazione: esempio 1 (4/8)(4/8)
��������
����
��������
====++++
====++++++++
323
12
32
321
xx
xxx
������������
����
������������
−−−−====++++−−−−
====++++
====++++++++
23
21
21
323
12
32
32
321
xx
xx
xxx sostituisco la 3a equazione con la somma:(2a equazione)××××(-a32/a22)+3a equazione
21
61====
31
365
x 1−−−−====((continuacontinua))

Paaina 17Sistemi lineari
17
Algoritmo di diagonalizzazione: esempio 1 Algoritmo di diagonalizzazione: esempio 1 (5/8)(5/8)
��������
����
��������
−−−−====
====++++====++++++++
1x65
3x2x31xxx2
3
32
321
��������
����
��������
−−−−====
====++++
====++++
1x65
3x2x3
0x31
x2
3
32
31
sostituisco la 1a equazione con la somma:(2a equazione)××××(-a12/a22)+1a equazione
1−−−−31
((continuacontinua))

Paaina 18Sistemi lineari
18
Algoritmo di diagonalizzazione: esempio 1 Algoritmo di diagonalizzazione: esempio 1 (6/8)(6/8)
��������
����
��������
−−−−====
====++++
====++++
1x65
3x2x3
0x31
x2
3
32
31 sostituisco la 1a equazione con la somma:(3a equazione)××××(-a13/a33)+1a equazione
31−−−−
56
��������
����
��������
−−−−====
====++++
====
1x65
3x2x352
x2
3
32
1
52−−−−====
((continuacontinua))

Paaina 19Sistemi lineari
19
Algoritmo di diagonalizzazione: esempio 1 Algoritmo di diagonalizzazione: esempio 1 (7/8)(7/8)
sostituisco la 2a equazione con la somma:(3a equazione)××××(-a23/a33)+2a equazione
-2 56
512−−−−====
��������
����
��������
−−−−====
====++++
====
1x65
3x2x352x2
3
32
1
������������
����
������������
−−−−====
====
====
1x65
527
x352
x2
3
2
1
((continuacontinua))

Paaina 20Sistemi lineari
20
Algoritmo di diagonalizzazione: esempio 1 Algoritmo di diagonalizzazione: esempio 1 (8/8)(8/8)
����������������������������
����
����
����������������������������
����
����
−−−−
====
������������������������
����
����
������������������������
����
����
56
59
51
x
x
x
3
2
1
Dalla forma scalare alla forma vettoriale Ax=b :
������������������������
����
����
������������������������
����
����
−−−−
====������������
����
����
������������
����
����
������������
����
����
������������
����
����
56
5951
xxx
100010001
3
2
1
Il sistema è univocamente determinato, soluzione: (1/5, 9/5,-6/5)
������������
����
������������
−−−−====
====
====
56
x59
x51
x
3
2
1
������������
����
������������
−−−−====
====
====
1x65
527
x3
52
x2
3
2
1

Paaina 21Sistemi lineari
21
Algoritmo di diagonalizzazione: esempio 2 Algoritmo di diagonalizzazione: esempio 2 (1/3)(1/3)
Seguendo i passi suggeriti dall’algoritmo applicato all’esercizio precedente, troveremmo un moltiplicatore con denominatore nullo, dunque si scambia la seconda equazione con la terza (algoritmo con pivot)
(continua)(continua)
��������
����
��������
====++++
====++++
====++++++++
22
1
12
32
3
321
xx
x
xxx
��������
����
��������
====++++
====++++
====++++++++
1
22
12
3
32
321
x
xx
xxx
Paaina 22Sistemi lineari
22
Algoritmo di diagonalizzazione: esempio 2 Algoritmo di diagonalizzazione: esempio 2 (2/3)(2/3)
(continua)(continua)
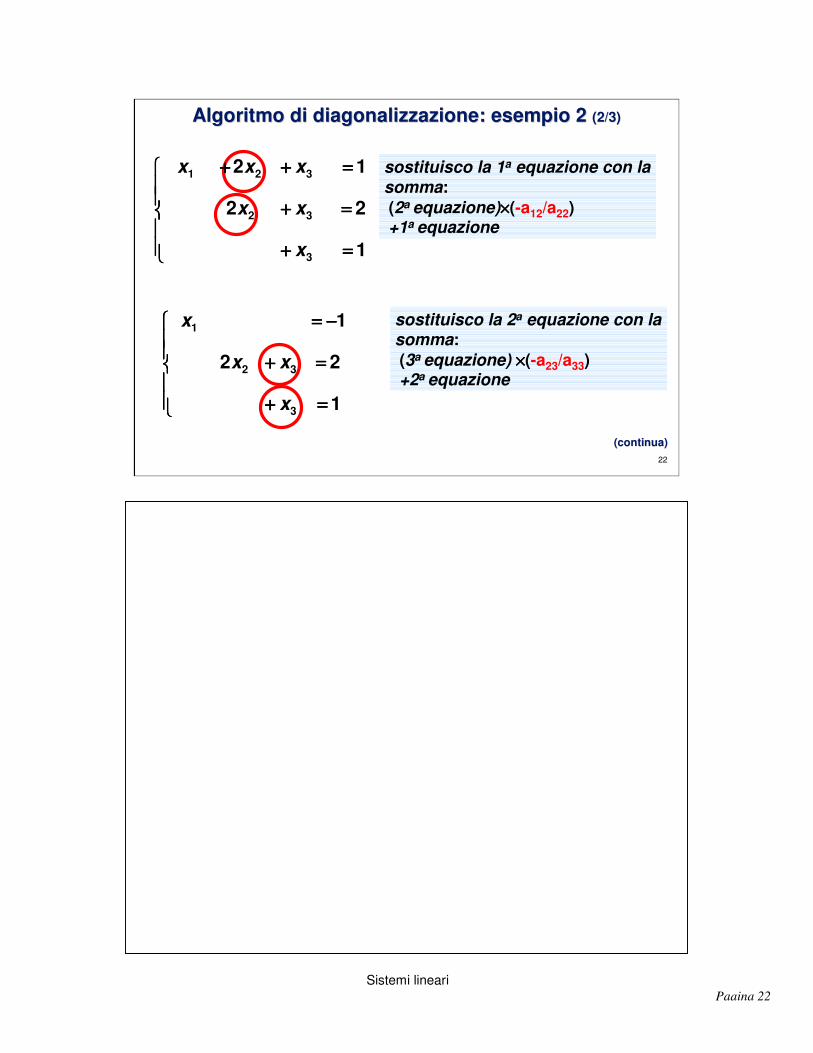
sostituisco la 1a equazione con la somma:(2a equazione)××××(-a12/a22)+1a equazione
��������
����
��������
====++++
====++++
====++++++++
1
22
12
3
32
321
x
xx
xxx
��������
����
��������
====++++
====++++
−−−−====
1
22
1
3
32
1
x
xx
x sostituisco la 2a equazione con la somma:(3a equazione) ××××(-a23/a33)+2a equazione

Paaina 23Sistemi lineari
23
������������
����
������������
====++++
====
−−−−====
121
1
3
2
1
x
x
x
Dalla forma scalare alla forma vettoriale Ax=b :
����������������
����
����
����������������
����
����−−−−
====
����������������
����
����
����������������
����
����
����������������
����
����
����������������
����
����
1211
100
010
001
3
2
1
x
x
x
Il sistema è dunque univocamente determinatocon soluzione il vettore [-1,1/2,1]T
��������
����
��������
====++++
====
−−−−====
1
12
1
3
2
1
x
x
x
Algoritmo di diagonalizzazione: esempio 2 Algoritmo di diagonalizzazione: esempio 2 (3/3)(3/3)
Paaina 24Sistemi lineari
24
Algoritmo di diagonalizzazione: esempio 3 Algoritmo di diagonalizzazione: esempio 3 (1/2)(1/2)
(continua)(continua)
��������
����
��������
====++++−−−−
====++++++++
====++++−−−−
3224
12
22
321
321
321
xxx
xxx
xxx
������������
����
������������
−−−−====
−−−−====
====++++
10
12232
2
31
x
xx
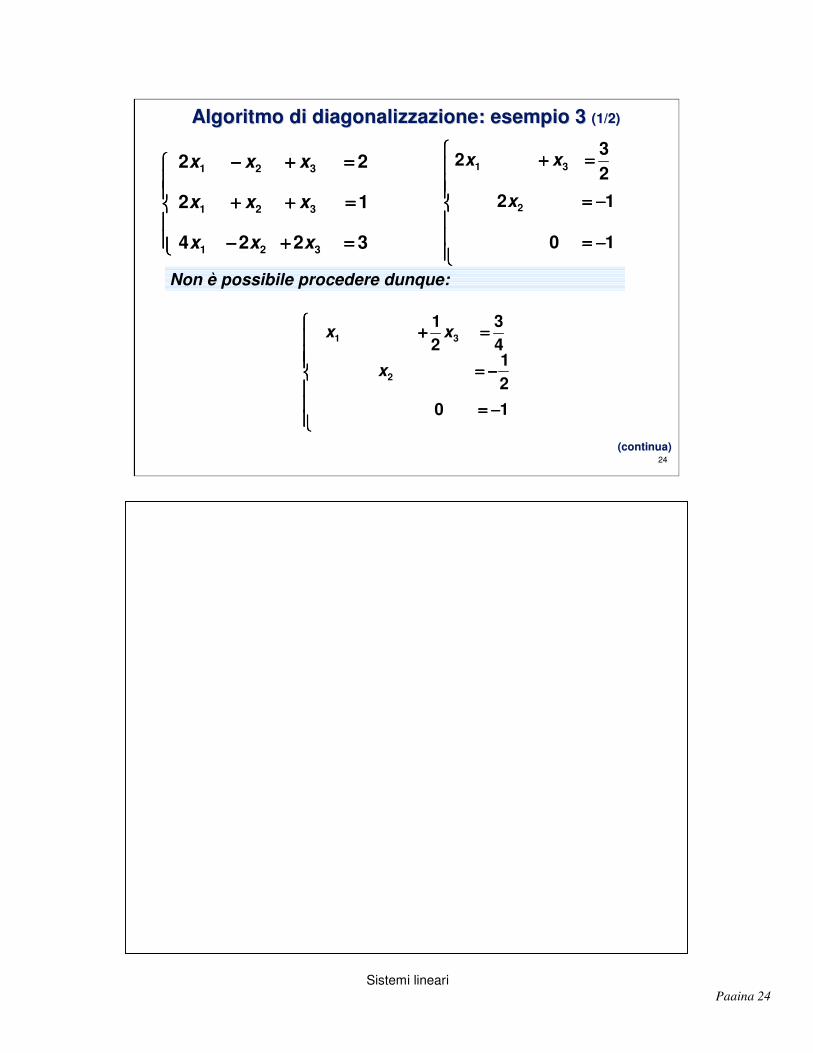
Non è possibile procedere dunque:
������������
����
������������
−−−−====
−−−−====
====++++
1021
43
21
2
31
x
xx

Paaina 25Sistemi lineari
25
che in forma vettoriale Ax=b:
������������������������
����
����
������������������������
����
����
−−−−
−−−−====
����������������
����
����
����������������
����
����
������������������������
����
����
������������������������
����
����
121
43
000
0102101
3
2
1
x
x
x
Non è possibile ottenere una diagonalizzazione della matrice A, il sistema è dunque non univocamente determinato.In particolare risulta impossibile (0 = -1 !!! )
Algoritmo di diagonalizzazione: esempio 3 Algoritmo di diagonalizzazione: esempio 3 (2/2)(2/2)

Paaina 26Sistemi lineari
26
Algoritmo di diagonalizzazione: esempio 4 Algoritmo di diagonalizzazione: esempio 4 (1/2)(1/2)
(continua)(continua)
��������
����
��������
====++++−−−−
====++++++++
====++++−−−−
9333
12
3
321
32
321
xxx
xx
xxx
������������
����
������������
====
====++++++++
====++++
00
1227
23
32
31
xx
xx
non è possibile procedere
������������
����
������������
====
====++++
====++++
0021
21
27
23
32
31
xx
xx
Paaina 27Sistemi lineari
27
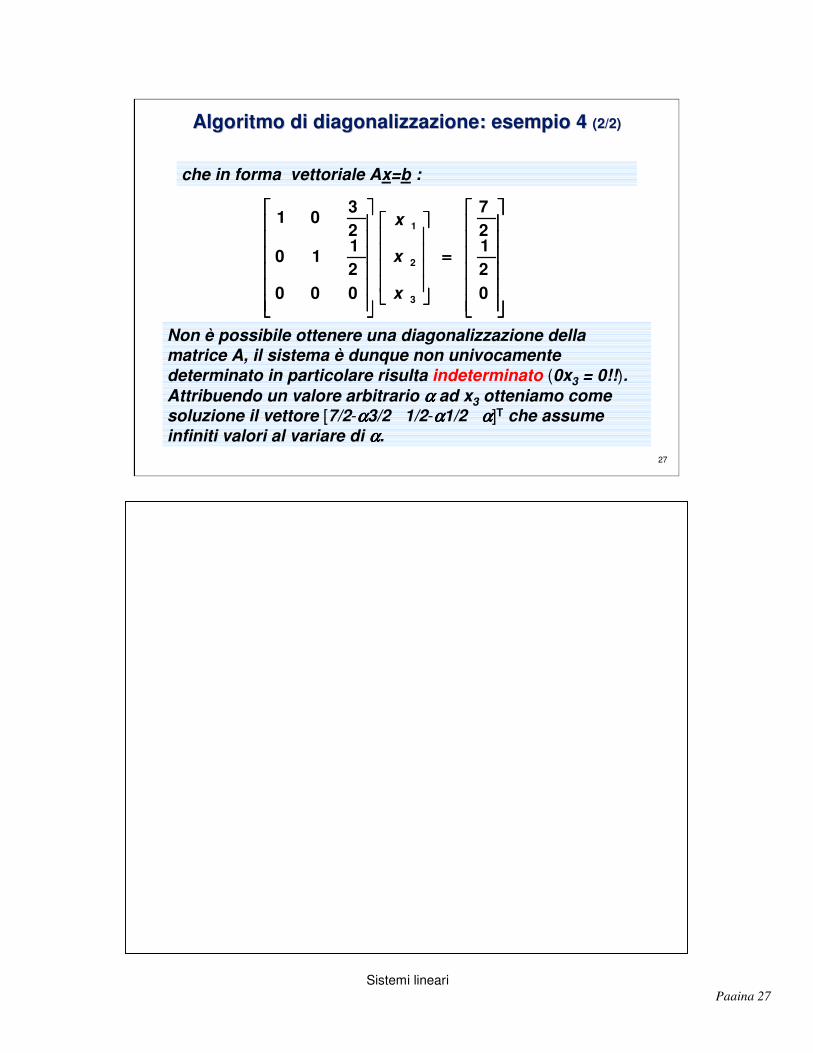
che in forma vettoriale Ax=b :
������������������������
����
����
������������������������
����
����
====
����������������
����
����
����������������
����
����
������������������������
����
����
������������������������
����
����
02127
00021
1023
01
3
2
1
x
x
x
Non è possibile ottenere una diagonalizzazione della matrice A, il sistema è dunque non univocamente determinato in particolare risulta indeterminato (0x3 = 0!!). Attribuendo un valore arbitrario αααα ad x3 otteniamo come soluzione il vettore [7/2-αααα3/2 1/2-αααα1/2 αααα]T che assume infiniti valori al variare di αααα.
Algoritmo di diagonalizzazione: esempio 4 Algoritmo di diagonalizzazione: esempio 4 (2/2)(2/2)

Paaina 28Sistemi lineari
28
Il procedimento illustrato perviene ad una matrice dei coefficienti caratterizzante il sistema lineare, precisamente:•È una matrice unitaria I; segue che il sistema è univocamente determinato•È una matrice non diagonale, ma con una o più righe nulle nelle ultime posizioni; segue che il sistema è impossibile se il vettore termine noto (modificato dall’algoritmo) ha, nelle corrispondenti posizioni, componenti non nulle•È una matrice con una o più righe nulle nelle ultime posizioni; segue che il sistema è indeterminato se il vettore termine noto (modificato dall’algoritmo) ha nelle corrispondenti posizioni componenti nulle.
ConclusioneConclusione

29
Sistemi lineari rettangolari
“In un sistema rettangolare il numero di equazioni è diverso dal numero di incognite.Se si hanno più equazioni che incognite il sistema è detto sovradeterminato.Se si hanno più incognite che equazioni il sistema è detto sottodeterminato”

Paaina 30Sistemi lineari
30
L’algoritmo esemplificato per sistemi quadrati è generalizzabile al caso di sistemi rettangolari m≠≠≠≠n(cercando la diagonalizzazione di una sottomatrice quadrata)
Sistema lineare rettangolare Sistema lineare rettangolare –– esempio 1 esempio 1 (1/2)(1/2)
��������
����
−−−−====++++−−−−++++−−−−====−−−−++++−−−−
====−−−−−−−−
2xx2xx24xx2x3
14x6x4x2
4321
321
421
��������
����
��������
====++++++++++++
====++++++++++++====++++++++++++
mnmn22m11m
2nn2222121
1nn1212111
bxaxaxa
bxaxaxabxaxaxa
...............
...
...
(continua)(continua)
Paaina 31Sistemi lineari
31
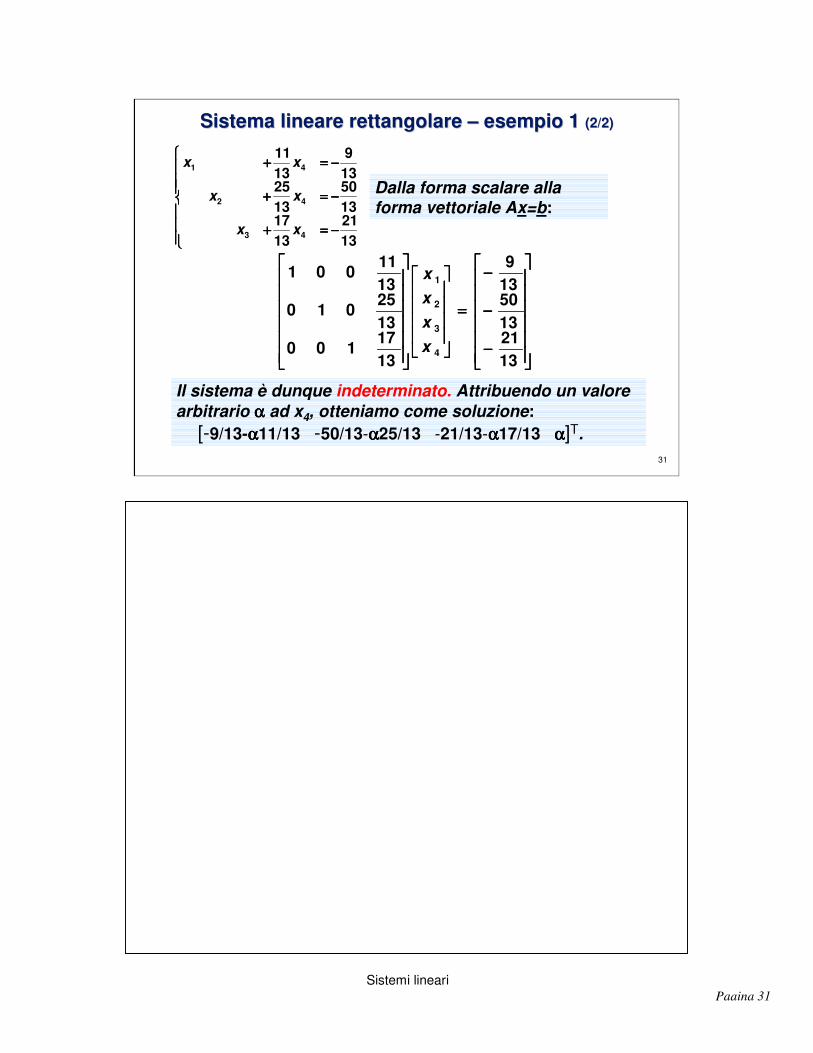
Sistema lineare rettangolare Sistema lineare rettangolare –– esempio 1 esempio 1 (2/2)(2/2)
������������
����
������������
−−−−====++++
−−−−====++++
−−−−====++++
1321
1317
1350
1325
139
1311
43
42
41
xx
xx
xx
Dalla forma scalare alla forma vettoriale Ax=b:
������������������������
����
����
������������������������
����
����
−−−−
−−−−
−−−−
====
����������������
����
����
����������������
����
����
������������������������
����
����
������������������������
����
����
13211350139
1317
1001325
0101311
001
4
3
2
1
xxxx
Il sistema è dunque indeterminato. Attribuendo un valore arbitrario αααα ad x4, otteniamo come soluzione:
[-9/13-αααα11/13 -50/13-αααα25/13 -21/13-αααα17/13 αααα]T.

Paaina 32Sistemi lineari
32
Sistema lineare rettangolare Sistema lineare rettangolare –– esempio 2 esempio 2 (1/2)(1/2)
��������
����
��������
====++++−−−−====++++−−−−−−−−====−−−−++++
====++++−−−−
1214322
3532
21
321
321
321
xxxxx
xxxxxx
��������
����
��������
============
−−−−====
00101
3
2
1
xx
x
(continua)(continua)

Paaina 33Sistemi lineari
33
Sistema lineare rettangolare Sistema lineare rettangolare –– esempio 2 esempio 2 (2/2)(2/2)
che in forma vettoriale Ax=b:
����������������
����
����
����������������
����
����−−−−
====������������
����
����
������������
����
����
����������������
����
����
����������������
����
����
0101
000100010001
3
2
1
xxx
Il sistema è dunque univocamente determinato.Con soluzione [-1, 0, 1]T.

34
Reduced Row Echelon Form

Paaina 35Sistemi lineari
35
Consideriamo i risultati ottenuti finora applicando l’algoritmo di diagonalizzazione. Osservando come sono state trasformate la matrice dei coefficienti e la colonna dei termini noti osserviamo quanto segue.Se si orla col vettore dei termini noti la matrice ottenuta (lo poniamo come ultima colonna) verifichiamo che nella matrice orlata: •in ogni riga il primo elemento non nullo è 1 (tale elemento èdetto “leading one”);•••• se ci sono righe con tutti gli elementi nulli queste sono le ultime righe della matrice;•ogni colonna che contiene leading 1 ha solo zeri al di sotto e al sopra di esso.Si dice che tale matrice è in
Reduced Row Echelon Form
Reduced Row Echelon Form Reduced Row Echelon Form (1/2)(1/2)
(continua)(continua)

Paaina 36Sistemi lineari
36
Reduced Row Echelon Form Reduced Row Echelon Form (2/2)(2/2)
Teorema: ogni matrice può essere trasformata - con una sequenza di
operazioni e permutazioni sulle righe - in una ed una sola matrice ridotta in echelon
form.
Analizzando la matrice, come visto in tutti gli esempi precedenti, si deducono carattere ed eventuali soluzioni del sistema.
In MATLAB la Reduced row echelon form di una matrice si ottiene mediante il comando rref:
Esempi:
>> rref(B)
se A è la matrice dei coefficienti e b il vettore (colonna) dei termini noti, il comando:
>> rref([A b])fornisce una matrice che fornisce (dalle colonne di sinistra) lanatura del sistema e dall’ultima colonna le eventuali soluzioni (per la casistica completa vedere le schede seguenti).

Paaina 37Sistemi lineari
37
Casistica di Casistica di echelonechelon formform (caso 1) (caso 1) (1/9)(1/9)
������������
����
����
������������
����
����
cba
100010001
Il sistema quadrato (3 equazioni in 3 incognite) è univocamente determinato con soluzione: [a b c]T.Caso particolare sistema omogeneo (a=b=c=0) con soluzione [0 0 0]T.
(continua)(continua)
MATRICE ATRASFORMATA
VETTORE bTRASFORMATO
Esaminando la reduced row echelon form (rref) della matrice orlata si vede che il sistema trasformato (equivalente a quello originale) è:
x1 = a
x2 = b
x3 = c
da cui segue immediatamente la soluzione.

Paaina 38Sistemi lineari
38
Casistica di Casistica di echelonechelon formform (caso 2) (caso 2) (2/9)(2/9)
Il sistema quadrato (3 equazioni in 3 incognite) è impossibile
������������
����
����
������������
����
����
1000010001
sr
(continua)(continua)
Esaminando la reduced row echelon form (rref) della matrice orlata si vede che il sistema trasformato (equivalente a quello originale) è:
x1 +rx3 = 0
x2 +sx3 = 0
0 = 1
L’ultima equazione è chiaramente impossibile.

Paaina 39Sistemi lineari
39
Casistica di Casistica di echelon formechelon form (caso 3) (caso 3) (3/9)(3/9)
������������
����
����
������������
����
����
00001001
bsar
Il sistema quadrato (3 equazioni in 3 incognite) è indeterminato con infinite soluzioni: [a-ααααr b-ααααs αααα]T.Caso particolare a=b=0 sistema omogeneo indeterminato�
(continua)(continua)
Esaminando la reduced row echelon form (rref) della matrice orlata si vede che il sistema trasformato (equivalente a quello originale) è:
x1 +rx3 = a
x2 +sx3 = b
0 = 0
L’ultima equazione è sempre soddisfatta, qualunque valore α si attribuisca ad x3. Tale valore, sostituito a x3 nella prima e nella seconda equazione, fornisce la soluzione completa (ossia il vettore [x1 x2 x3 ]T.
Paaina 40Sistemi lineari
40
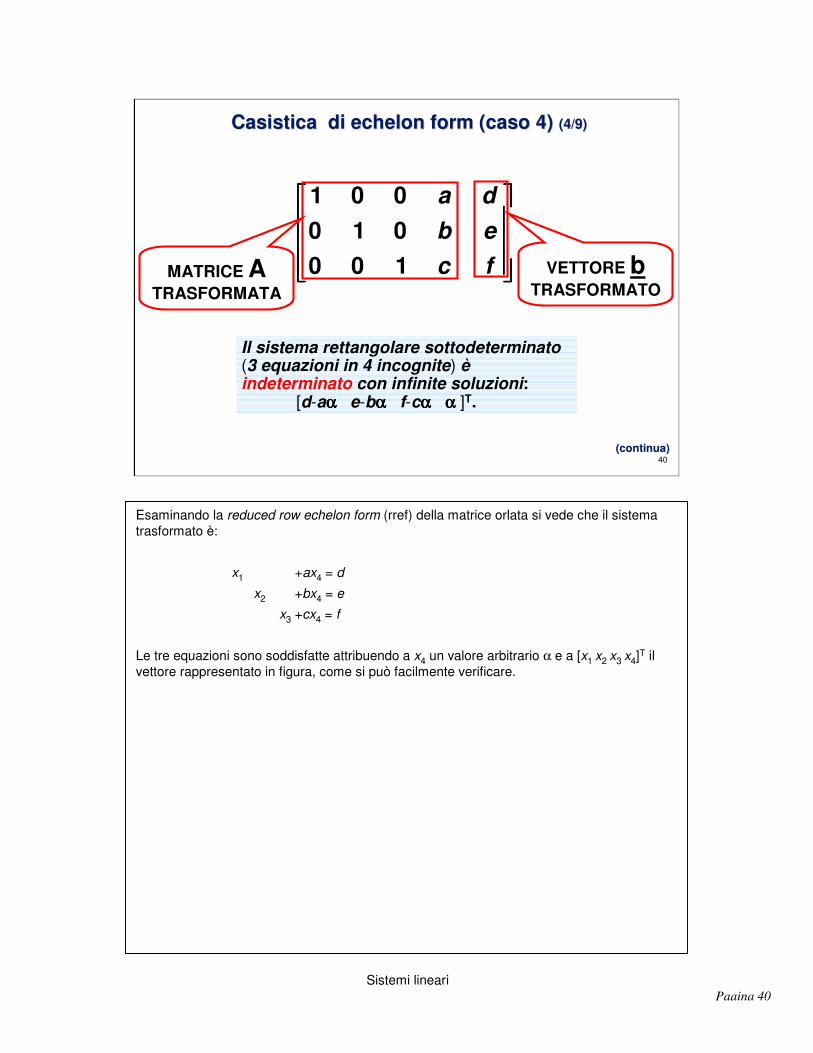
Casistica di Casistica di echelonechelon formform (caso 4) (caso 4) (4/9)(4/9)
Il sistema rettangolare sottodeterminato(3 equazioni in 4 incognite) è indeterminato con infinite soluzioni:
[d-aαααα e-bαααα f-cαααα αααα ]T.
������������
����
����
������������
����
����
fcebda
100010001
(continua)(continua)
MATRICE ATRASFORMATA
VETTORE bTRASFORMATO
Esaminando la reduced row echelon form (rref) della matrice orlata si vede che il sistema trasformato è:
x1 +ax4 = d
x2 +bx4 = e
x3 +cx4 = f
Le tre equazioni sono soddisfatte attribuendo a x4 un valore arbitrario α e a [x1 x2 x3 x4]T il vettore rappresentato in figura, come si può facilmente verificare.

Paaina 41Sistemi lineari
41
Casistica di Casistica di echelonechelon formform (caso 5) (caso 5) (5/9)(5/9)
Il sistema rettangolare sottodeterminato(3 equazioni in 4 incognite) è indeterminato con infinite soluzioni:
[d-rαααα e-sαααα αααα f ]T.
������������
����
����
������������
����
����
fesdr
1000010001
(continua)(continua)
Esaminando la reduced row echelon form (rref) della matrice orlata si vede che il sistema trasformato è:
x1 +rx3 = d
x2 +sx3 = e
x4 = f
L’ultima equazione fornisce immediatamente x4.
Le altre due equazioni sono soddisfatte attribuendo a x3 un valore arbitrario α e a [x1 x2 x3 x4]T il vettore rappresentato in figura, come si può facilmente verificare.

Paaina 42Sistemi lineari
42
Casistica di Casistica di echelonechelon formform (caso 6) (caso 6) (6/9)(6/9)
Il sistema rettangolare sottodeterminato (3 equazioni in 4 incognite) è impossibile
������������
����
����
������������
����
����
10000010001
bsar
(continua)(continua)
Esaminando la reduced row echelon form (rref) della matrice orlata si vede che il sistema trasformato è:
x1 +rx3 +ax4 = 0
x2 +sx3 +bx4 = 0
0 = 1
L’ultima equazione è chiaramente impossibile.

Paaina 43Sistemi lineari
43
Casistica di Casistica di echelonechelon formform (caso 7) (caso 7) (7/9)(7/9)
Il sistema rettangolare sovradeterminato(4 equazioni in 3 incognite) è univocamente determinato con soluzione
[ a b c]T.
����������������
����
����
����������������
����
����
0000100010001
cba
(continua)(continua)
MATRICE ATRASFORMATA
VETTORE bTRASFORMATO
Esaminando la reduced row echelon form (rref) della matrice orlata si vede che il sistema trasformato è:
x1 = a
x2 = b
x3 = c
0 = 0
L’ultima equazione è sempre soddisfatta.
Dalle altre tre segue immediatamente la soluzione.

Paaina 44Sistemi lineari
44
Casistica di Casistica di echelonechelon formform (caso 8) (caso 8) (8/9)(8/9)
Il sistema rettangolare sovradeterminato(4 equazioni in 3 incognite) è impossibile
����������������
����
����
����������������
����
����
00001000010001
sr
(continua)(continua)
Esaminando la reduced row echelon form (rref) della matrice orlata si vede che il sistema trasformato è:
x1 +rx3 = 0
x2 +sx3 = 0
0 = 1
0 = 0
La terza equazione è chiaramente impossibile.

Paaina 45Sistemi lineari
45
Casistica di Casistica di echelonechelon formform (caso 9) (caso 9) (9/9)(9/9)
Il sistema rettangolare sovradeterminato(4 equazioni in 3 incognite) è indeterminato con infinite soluzioni:
[ a-ααααr b-ααααs αααα]T.
����������������
����
����
����������������
����
����
00000000
1001
bsar
Esaminando la reduced row echelon form (rref) della matrice orlata si vede che il sistema trasformato è:
x1 +rx3 = a
x2 +sx3 = b
0 = 0
0 = 0
Le ultime due equazioni sono sempre soddisfatte.
Le altre due equazioni sono soddisfatte attribuendo a x3 un valore arbitrario α e a [x1 x2 x3]T il vettore rappresentato in figura, come si può facilmente verificare.

Paaina 46Sistemi lineari
46
Applicazione: arco a tre cerniere Applicazione: arco a tre cerniere (1/2)(1/2)
1
1
2
2
3 X1
X2
X3
X4
HV
X 5
X 5 X6
X6α α
x1 + x5cosαααα = 0x2 + x5sinαααα = 0NODO 1:
�� ��
-x5cosαααα + x6cosαααα + H = 0-x5sinαααα - x6sinαααα + V = 0NODO 2:
�� ��
x3 – x6cosαααα = 0x4 + x6sinαααα = 0NODO 3:
�� ��
(continua)(continua)
L’arco a tre cerniere è un sistema isostatico: due aste con complessivi 6 gradi di libertà, 3 cerniere per complessivi 6 gradi di vincolo.
Il sistema lineare risolvente è quindi un sistema determinato: 6 equazioni (due equazioni di equilibrio per ogni nodo) e 6 incognite (le 4 reazioni vincolari x1,..,x4 e gli sforzi interni delle aste x5, x6 presi positivi se di trazione).

Paaina 47Sistemi lineari
47
Applicazione: arco a tre cerniere Applicazione: arco a tre cerniere (2/2)(2/2)
x1 + x5cosαααα = 0x2 + x5sinαααα = 0-x5cosαααα + x6cosαααα + H = 0-x5sinαααα - x6sinαααα + V = 0x3 – x6cosαααα = 0x4 + x6sinαααα = 0
��������������������������������
����
����
��������������������������������
����
����
A =
cosαααα1 0 0 0 0
0 1 0 0 sinαααα 0
0 0 0 0 -cosαααα cosαααα
0 0 0 0 -sinαααα -sinαααα
0 0 1 0 0 -cosαααα
0 0 0 1 0 sinαααα
b =
��������������������������������
����
����
��������������������������������
����
���� 00-H-V00
Dal sistema lineare quadrato si ricavano la matrice A e il vettore b, che permettono di risolvere numericamente il sistema.

Paaina 48Sistemi lineari
48
Arco a tre cerniere: struttura labile (Arco a tre cerniere: struttura labile (αααααααα==0))
x2 = x4 = 0
H
X2 X4
X3
HX6 X6X5 X5
x3 = x6x5 = x6 + H
X1
x1 = -x5 = -x6 - H
SISTEMA INDETERMINATO
VX6X5
V
SISTEMA IMPOSSIBILE
Sebbene il sistema lineare sia sempre quadrato, particolari configurazioni geometriche del sistema fisico come quella in figura (cosα=1) lo possono rendere anomalo.
Nella parte alta il sistema è sollecitato solo da una forza esterna orizzontale. Le reazioni vincolari verticali risultano nulle, le reazioni vincolari orizzontali risultano indeterminate. Il sistema fornisce la seguente rref della matrice orlata (analogo al caso 3):
1. 0. 0. 0. 0. 1. - H
0. 1. 0. 0. 0. 0. 0.
0. 0. 1. 0. 0. -1. 0.
0. 0. 0. 1. 0. 0. 0.
0. 0. 0. 0. 1. -1. H
0. 0. 0. 0. 0. 0. 0.
Col solo carico verticale V non può stare in equilibrio il nodo 2 e il sistema è impossibile. Corrispondentemente la rref diventa (analogo al caso 2):
1. 0. 0. 0. 0. 1. 0.
0. 1. 0. 0. 0. 0. 0.
0. 0. 1. 0. 0. - 1. 0.
0. 0. 0. 1. 0. 0. 0.
0. 0. 0. 0. 1. - 1. 0.
0. 0. 0. 0. 0. 0. 1.





























