Embed Size (px)
Citation preview

withoutmposed ofp-stems. The
d to variousmonstrated.to achieveccelerationser isolation
‘‘Smart’’ Base Isolation SystemsJ. C. Ramallo1; E. A. Johnson, A.M.ASCE2; and B. F. Spencer Jr., M.ASCE3
Abstract: A ‘‘smart’’ base isolation strategy is proposed and shown to effectively protect structures against extreme earthquakessacrificing performance during the more frequent, moderate seismic events. The proposed smart base isolation system is coconventional low-damping elastomeric bearings and ‘‘smart’’ controllable~semiactive! dampers, such as magnetorheological fluid damers. To demonstrate the advantages of this approach, the smart isolation system is compared to lead-rubber bearing isolation syeffectiveness of the isolation approaches are judged based on computed responses to several historical earthquakes scalemagnitudes. The limited performance of passive systems is revealed and the potential advantages of smart dampers are deTwo- and six-degree-of-freedom models of a base-isolated building are used as a test bed in this study. Smart isolation is shownnotable decreases in base drifts over comparable passive systems with no accompanying increase in base shears or in aimparted to the superstructure. In contrast to passive lead-rubber bearing systems, the adaptable nature of the smart dampsystem provides good protection to both the structure and its contents over a wide range of ground motions and magnitudes.
DOI: 10.1061/~ASCE!0733-9399~2002!128:10~1088!
CE Database keywords: Damping; Base isolation; Earthquakes.
pro
s
speed.oorure
turaarch
ntsidgebu
atedniriou-
co-o-t tosted
in-luten is
t toturald in
Theder-igher
ctiverth-e-
ldingemsseen
ndess
ry-er-ipes
nc-r thetheis
Asa
k
l de
ng,
of
ntilduamusper00;
N
Introduction
One of the most widely implemented and accepted seismictection systems is base isolation. Seismic base isolation~Skinneret al. 1993; Naeim and Kelly 1999! is a technique that mitigatethe effects of an earthquake by essentiallyisolating the structureand its contents from potentially dangerous ground motion, ecially in the frequency range where the building is most affectThe goal is to simultaneously reduce interstory drifts and flaccelerations to limit or avoid damage, not only to the structbut also to its contents, in a cost-effective manner.
Recent years have seen a number of catastrophic strucfailures due to severe, impulsive, seismic events. Some reseers ~e.g., Hall et al. 1995; Heaton et al. 1995! have raised con-cerns as to the efficacy of seismic isolation during such eveBased on observations from the January 17, 1994 Northrearthquake, these researchers suggested that base-isolatedings are vulnerable to strong impulsive ground motions generat near-source locations. Moreover, recent revisions to the Uform Building Code~ICBO 1997! have made the requirements fobase-isolation systems more stringent compared to the prevversions~ICBO 1994; Kelly 1999a!, potentially rendering the ad
1Research Associate, Laboratorio de Estructuras, Univ. NacionaTucuman, Av. Roca 1800,~4000! San Miguel de Tucuma´n, Tucuma´n,Argentina. E-mail: [email protected]
2Assistant Professor, Dept. of Civil and Environmental EngineeriUniv. of Southern California, Los Angeles, CA 90089-2531~correspond-ing author!. E-mail: [email protected]
3Linbeck Professor, Dept. of Civil Engineering and Geo. Sci., Univ.Notre Dame, Notre Dame, IN 46556-0767. E-mail: [email protected]
Note. Associate Editor: Roger G. Ghanem. Discussion open uMarch 1, 2003. Separate discussions must be submitted for indivipapers. To extend the closing date by one month, a written requestbe filed with the ASCE Managing Editor. The manuscript for this pawas submitted for review and possible publication on October 23, 20approved on March 29, 2002. This paper is part of theJournal of Engi-neering Mechanics, Vol. 128, No. 10, October 1, 2002. ©ASCE, ISS0733-9399/2002/10-1088–1100/$8.001$.50 per page.
1088 / JOURNAL OF ENGINEERING MECHANICS / OCTOBER 2002
-
-
l-
.
ild-
-
s
ditional complexity and cost of base-isolated structures less enomically justified~Kelly 1999b!. The code-mandated accommdation of larger base displacements and the requiremenconsider a stronger Maximum Capable Earthquake has suggethe need for supplemental damping devices~Asher et al. 1996!.
The addition of damping, however, may also increase theternal motion of the superstructure as well as increase absoaccelerations, thus defeating many of the gains base isolatiointended to provide~Inaudi and Kelly 1993b; Kelly 1999a,b!. Tounderstand the impact of excessive damping, it is importanconsider the ever increasing necessity of protecting nonstruccomponents and highly sensitive equipment such as are founhospitals, communication centers, and computer facilities.performance of this equipment can be easily disrupted by moate acceleration levels and even permanently damaged by hexcitations~Inaudi and Kelly 1993a!. Consequently, mitigatingdamage to the contents of a structure has become a key objein base isolation design. For example, the 1994 Northridge eaquake ‘‘caused extensive destruction of building interiors. Bcause of the intense shaking and heavy damage to other buielements, sprinkler piping was frequently severed and systwere rendered useless on a much wider scale than has beenin other earthquakes. Interior partitions, furniture, ceilings, aHVAC and other equipment were destroyed with a thoroughnnever before seen on such a scale.’’~An excerpt from ‘‘The Janu-ary 17, 1994 Northridge, CA Earthquake—An EQE SummaReport,’’ March 1994, by EQE International.! Indeed, some emergency facilities were rendered nonfunctional, not due to supstructure damage, but because they were flooded by water pbroken due to excessive accelerations within the structure~Hall1995!. The need for hospitals or emergency facilities to be futioning postearthquake is clear. As another example, considepotential loss of revenue by internet businesses involved inexpandinge-commerce market: tremendous financial damageincurred if their websites and networks crash for a day or two.a case in point,USA Todayreported on February 11, 2000 thatsingle firm,eBay, lost $5 million in sales and $4 billion in stoc
lt

Totureing
inge-de-as-ralearnigh-car-
p-theissirin
h an-thesysibe
iledu
entaith
cce
tiong c
-
thetio
tivit-
a-t al.
ive-, acingr re
pe
a-t al.an-
9
alected
ofthein-
aseout
strat-art
iffer-e. A
for
desstics
g.sur-ures
ionori-ithand
the
ted.tor-leem.rre-vertedor-
rs insivenyns.
eriordingels.
remefre-
omve-tellyer
is arsare
the
value when a hacker shut down its site for only 22 hours.protect the contents and nonstructural elements in a strucstructural accelerations should be minimized while maintainacceptable base displacement levels.
Several means of adding damping are available for reducbase drift~base drift demands determine the ‘‘seismic gap’’ rquired for utilities, connections to adjacent structures or siwalks, etc.!. The three methods most commonly used today psively augment the damping provided by low-damping, naturubber bearings. Low-damping natural and synthetic rubber bings typically provide 2–3% of critical damping in the isolatiomode. One method of increasing the damping is to use hdamping natural rubber—natural rubber containing extrafinebon black, oils or resins, and other proprietary fillers~Naeim andKelly 1999!—that may provide up to 20% isolation mode daming. Another common approach is to install lead plugs inlow-damping laminated rubber bearings to increase energy dpation through hysteretic damping as the lead plugs shear dularge deformation motion. Third, supplemental dampers, sucviscous dampers~both linear and nonlinear, see Taylor and Costantinou 1996! and friction dampers, may be used to augmentdamping~Soong and Dargush 1997!. Friction pendulum system~FPSs! are another popular base isolation strategy; though phcally different from lead-rubber bearing designs, FPSs maymodeled in a similar manner and exhibit similar behavior. Whthese passive methods have been used in applications to rethe deformation demand on the isolation system, the supplemdamping itself tends to drive energy into the higher modes, wcorresponding increases in superstructure deformation and aeration, that may damage the building and its contents~Kelly andTsai 1985, 1993!. Spencer et al.~2000! showed that adding amoderate amount of viscous damping to a low-damping isolasystem does decrease responses. However, too much dampincause accelerations and interstory drifts to go back up~Hall 1999;Spencer et al. 2000!, eliminating many of the improvements isolation is intended to provide.
Active and semiactive strategies may be able to providereduced base drifts without the increase in superstructure moseen for passive devices. As reported by Spencer and Sain~1997!,a number of analytical studies have focused on the use of accontrol devices in parallel with a base-isolation system for liming base drift~e.g., Kelly et al. 1987; Reinhorn et al. 1987; Ngarajaiah et al. 1993; Schmitendorf et al. 1994; Yoshida e1994; Yang et al. 1996!. Additionally, Reinhorn and Riley~1994!performed several small-scale experiments to verify the effectness of active strategies used in simulation studies. Howevertive control devices have yet to be fully embraced by practicengineers, in large part due to the challenges of large powequirements~that may be interrupted during an earthquake!, con-cerns about stability and robustness, and so forth.
Several researchers have investigated the use of smart dam~also called semiactive or controllable passive dampers! for seis-mic response mitigation~e.g., Feng and Shinozuka 1990; Nagrajaiah 1994; Makris 1997; Johnson et al. 1999; Kurata e1999; Niwa et al. 1999; Symans and Constantinou 1999; Symand Kelly 1999; Yoshida et al. 1999!. Studies of smart base isolation have used several control design methodologies@such asfuzzy control~e.g., Nagarajaiah 1994; Symans and Kelly 199!,sliding mode control~e.g. Yang et al. 1996!, clipped-optimal con-trol ~e.g., Johnson et al. 1999; Spencer et al. 2000!, etc.# and haveexamined both bridge and building structures. The first full-scimplementation of smart base isolation was recently construat Keio Univ. ~Yoshida et al. 1999!. The main virtue of these
,
-
-gs
-
cel
l-
an
n
e
-
-
rs
s
semiactive controllable systems arises from the combinationthe adaptable nature of a fully active control system withstability characteristic of passive control systems, while maintaing low-power requirements.
The present work investigates the performance of a smart bisolation system and shows that it can reduce base drifts withthe accompanying acceleration increases seen with passiveegies. To demonstrate the superior protection provided by smdamping strategies, several historical earthquakes scaled to dent magnitudes are used to excite an isolated building structurlinear, lumped-mass structure model is used as the test bedthis study, first using a two degree-of-freedom~2DOF! model,and then a 6DOF model to examine the effects of higher moon smart damper performance. The isolation layer characteriare chosen such that the fundamental mode~the so-called ‘‘isola-tion’’ mode! has a period of 2.5 s and 2% of critical dampinThis configuration is typical of low-damping isolation systemcommon in engineering practice, is readily attainable using crent technology, and follows standard code-based proced~AASHTO 1991; Naeim and Kelly 1999!. Recognizing its world-wide popularity~due mainly to its simplicity and economy!, lead-rubber bearings~LRBs! are used as a baseline passive isolatsystem. These self-contained isolation bearings provide both hzontal flexibility and hysteretic damping in a single package, wcharacteristics determined by pre- and post-yield stiffnesses,yielding force. After a systematic parameter study usingBouc-Wen model~Wen 1976! for the LRBs, two ‘‘optimal’’ LRBdesigns are selected and their limitations/advantages highlighHerein, the optimal isolation damping is defined, comparablyInaudi and Kelly ~1993b!, as the one which produces a neaminimum peak~absolute! structural acceleration response whiproviding acceptable small deformations in the isolation systA smart dampersystem is then designed that is ‘‘optimal’’ ovethe suite of historical ground motions, achieving significantductions in the base drift compared to the ‘‘optimal’’ passidamping strategies without increasing the accelerations impainto the superstructure. Special consideration is given to a rigous and fair consideration of the performance of smart dampecomparison with the lead-rubber bearing designs. While passtrategies are shown to effectively isolate the building in macases, they are suboptimal for a wide range of ground motioOn the other hand, smart dampers are shown to provide a supbase isolation system for a broad class of earthquakes inclunear-source events as well as for a broad range of input levThus, a smart damper system can protect a structure from extearthquakes without sacrificing performance during the morequent, moderate seismic events.
Model Formulation
Structural System Model
First, the structure is modeled as a single degree-of-freed~SDOF! system representing the fundamental mode of the fistory building model given by Kelly et al.~1987!. In a subsequensection of this paper, a five degree-of-freedom model of the Ket al. ~1987! building is studied to analyze the effects of highmodes.
When the isolation layer is added, the augmented modeltwo degree-of-freedom~2DOF! system. The structural parameteof the SDOF fixed-base and 2DOF isolated structure modelsgiven in Fig. 1.~Two Java applets that demonstrate some ofissues in base isolation design are at http://www.nd.edu/;quake/
JOURNAL OF ENGINEERING MECHANICS / OCTOBER 2002 / 1089

e-aintors
arusandes-
pingm
atan
ex
theal
stif
e
unen-e
whiap
d a
erg
The-ar-
ber.
s-res.
he
ry
opini-
is
java.html.! It has been shown experimentally that the linear bhavior of low-damping rubber bearings can extend to shear strabove 100%; moreover, it is possible to manufacture isolawith nearly zero damping and linear shear behavior~Naeim andKelly 1999!. Therefore, the isolation layer is modeled as a lineKelvin-Voigt element—i.e., linear stiffness and viscodamping—and gives a fundamental mode with a 2.5 s period2% of critical ~viscous! damping.~The forces generated by thmultiple isolation bearings typical in a low-damping isolation sytem are modeled here by their combined stiffness and damcharacteristics.! This low-damping, long-period, isolation systeis a typical design and falls in the ‘‘Class (ii): lightly damped,linear isolation system’’ category of Skinner et al.~1993!.
Assuming the structural motion is sufficiently moderate thnonlinear effects may be neglected, and denoting the basestructure displacements relative to the ground byx5@xb xs#
T,the equations of motion of the base-isolated system may bepressed as
Mx1Cx1Kx5Lf 2M1xg (1)
where f 5supplemental force exerted by the smart damper orLRB lead plug;L5@1 0#T gives the position of the supplementdamper force; 15vector whose elements are all unity;xg
5absolute ground acceleration; and the mass, damping, andness matrices are, respectively,
M5Fmb 0
0 msG , C5Fcb1cs 2cs
2cs csG , K5Fkb1ks 2ks
2ks ksG(2)
Defining states q5@xT xT#T; outputs to be regulatedz5@xb (xs2xb) xb
a xsa#T including interstory drifts and absolut
floor accelerations; and sensorsy5@xb xba xs
a xg#T1v measur-ing base drift, absolute floor accelerations, and absolute groacceleration~v is a vector of sensor noises modeled as indepdent, Gaussian white-noise processes!, the state-space form of thequations of motion is given by
q5Aq1Bf 1Exg
z5Czq1Dzfy5Cyq1Dyf 1Fyxg1v
A5F 0 I
2M21K 2M21CG B5F 0M21LG E5F 0
21GCz5F D 0
2M21K 2M21CG Dz5F 0M21LG D5F 1 0
21 1GCy5F 1 0 0 0
2M21K 2M21C
0 0 0 0G Dy5F 0
M21L
0G Fy5F 0
01G
(3)whereD5matrix giving interstory drifts.
Damping Systems
Lead-rubber bearings are considered as the baseline againstthe smart damping strategies are compared. The modelingproaches for these two systems are described as follows:• Lead-rubber bearing~LRB!: the horizontal force required to
induce the LRB into its post-yield phase can be expressethe sum of three forces acting in parallel
fLRB5QPb1kbxb1cbxb (4)
1090 / JOURNAL OF ENGINEERING MECHANICS / OCTOBER 2002
s
d
-
f-
d
ch-
s
where QPb5(12Kyield /K initial)•Qy5yield force of the leadplug; Qy5yield force from both the lead plug and the rubbstiffness;kb andcb5horizontal stiffness and viscous dampincoefficient of the rubber composite of the bearing; andxb andxb5relative displacement and velocity across the bearing.damping component off LRB is mainly generated by the hysteretic behavior of the lead plug inserted into the rubber being, although the~small! viscous damping componentcbxb
may be attributed to the damping characteristics of the rubThe hysteretic behavior of the LRB~Fig. 2! is often treated asa bilinear solid~Kikuchi and Aiken 1997! with initial shearstiffnessK initial , and postyield shear stiffnessKyield5kb ~Skin-ner et al. 1993!. This bilinear model, however, causes overetimation of the acceleration levels in base-isolated structuIn contrast, a Bouc-Wen model~Wen 1976! gives results moreconsistent with experimental data~Nagarajaiah and Xiaohong2000!. Consequently, the LRB is modeled herein using tBouc-Wen model, which includes an evolutionary variablez toaccount for the hysteretic component of the forceQhyst
5zQPb. The differential equation governing the evolutionavariablez is given by
z52gzuxbuuzun212bxbuzun1Axb (5)
whereg, b, A, andn5shape parameters of the hysteresis lowhich herein are considered time invariant. To model thetial stiffness properly, it is required thatA5K initial /Qy . Forunloading to follow the preyield stiffness,g5b. For the post-yield purely plastic behavior of the lead [email protected]., Eq.~4!#, theevolutionary variablez will approach unity andQhyst5QPb
when A5g1b. Finally, the parametern, which governs thesharpness of the transition from initial to final stiffness,chosen to be 1~Spencer 1986!. Thus,n51 andA52g52b
Fig. 1. Two degree-of-freedom~2DOF! models
Fig. 2. Lead-rubber bearing~LRB! hysteretic models

eields-odpeco
en-
can
heg tmae obsea
39
the
ite orat
l-
ki
bu-
ey
degiear
anderetiment
metion
rt03;isro-a
sthe
re-on-ired
cy
s-of
aled
e
entare
he
jimi
5Kinitial /Qy .The postyield stiffnesskb , generated by the stiffness of thrubber, is fixed so as to give a 2.5 s fundamental postyperiod~Skinner et al. 1993!. The preyield to postyield stiffnesratio and the LRB yield forceQy are left to be design parameters; two sets of values will be studied herein that give goperformance in moderate and severe ground motions, restively. The viscous dampingcb from the rubber is assumed tgive 2% viscous damping in the absence of the lead plug.
• Smart (semiactive) damper: a controllable damper~e.g., con-trollable fluid damper, variable orifice damper, etc.; see Spcer and Sain 1997; Symans and Constantinou 1999! that mayonly exert dissipative forces; i.e.,f SAxb<0 where f SA is theforce applied by the damper andxb is the velocity across thedamper. For this study, the device is assumed ideal; i.e., itgenerate the desired~dissipative! forces with no delay andwith no actuator dynamics.The rubber isolation in these two systems is identical. T
difference between the two systems is that one has a lead plugive the supplemental damping, whereas the other has a sdamper instead. To make for a fair comparison, the peak forcthe smart damper is limited. The lead-rubber bearings are suquently shown to perform well for severe ground motions withyield force about 15% of the total weight of the building—consistent with the recommendations in the literature~Skinneret al. 1993; Wang and Liu 1994; Park and Otsuka 1999!. Thus, forfair comparison, the smart damper force will be limited to 53.kN ~15% of the total weight of the building!. This limit in thedamping force is enforced using a saturation criteria to clipdamper force to be within the limits~see, for instance, Fig. 4!.
Ground Excitation
The isolated structures considered herein are excited by a suground motions that are intended to encompass both modeevents• El Centro—north-south component of the 1940 Imperial Va
ley, Calif. earthquake~magnitude 7.1! recorded at ImperialValley Irrigation District substation in El Centro, Calif.;
• Hachinohe—north-south component of the 1968 Takochi-o~Hachinohe! earthquake~magnitude 7.9! signal recorded atHachinohe City, Japan;
and severe events• Kobe—north-south component of the 1995 Hyogo-ken Nan
~Kobe! earthquake~magnitude 7.2! recorded at the Kobe Japanese Meteorological Agency~JMA!, Kobe, Japan;
• Northridge—north-south component of the 1994 Northridgearthquake~magnitude 6.8! recorded at the Sylmar CountHospital parking lot in Sylmar, Calif.Additionally, the earthquakes are scaled to several magnitu
to better understand the effectiveness of the isolation stratefor different earthquake strengths. The moderate recordsscaled in the range from 0.5 to 2.0 times the historical record,the severe ones from 0.5 to 1.5. Although magnifying the sevearthquakes might seem unnecessary, the results using 1.5historical records are included to show the behavior of differdamping devices under extreme, but conceivable, events.
Smart Damping Strategies
Several studies have focused on the use of hybrid control schecomposed of damping devices in parallel with a base isola
-
ortf-
fe
sse
es
s
system~Spencer and Sain 1997!. A clipped-optimalcontrol strat-egy, shown to perform well in previous works involving smadampers~e.g., Dyke et al. 1996a,b; Johnson et al. 1999, 20Spencer et al. 2000!, is implemented in this study. The strategyto assume an ‘‘ideal’’ actively controlled device, design an apppriate primary controller for this active device, and then usesecondarycontroller which clips the optimal control force so it idissipative in a manner consistent with the physical nature ofdevice. @In an experimental implementation, the dissipationquirement is enforced implicitly by the device; a secondary ctroller is still necessary to make the actual force track the desforce commanded by the primary controller~Dyke et al.1996a,b!#.
To better inform the primary controller about the frequencontent of the ground motion, a Kanai-Tajimi~Soong and Grigo-riu 1993! shaping filter is incorporated into the model of the sytem. Fig. 3 shows the magnitude of this filter as a functionfrequency, as well as the frequency content of magnitude-scversions of the four historical design earthquakes. AnH2 /LQG~linear quadratic Gaussian! controller is then designed for thcombined filter/structure model, such as shown in Fig. 4~a!. As-suming independence of the ground excitation and measuremnoises, the interstory drifts and absolute floor accelerationsweighted using the cost function
J5 limt→`
1
tEF E
0
t
~zTQz1R fA2 !dtG (6)
with control weight R5(22 kN)22 and a diagonal evaluationweighting matrix:
Q5Fqdrifts8 I 0
0 qaccels8 I G (7)
where qdrifts8 5144 m22qdrifts and qaccels8 5(m/s2)22qaccels5scalaronly 2 columns drift and acceleration weights, andI5232 iden-tity matrix. By adjusting the nondimensional valuesqdrifts andqaccels, various levels of control performance are achieved. T
Fig. 3. Frequency content of design earthquakes and Kanai-Tashaping filter
JOURNAL OF ENGINEERING MECHANICS / OCTOBER 2002 / 1091

rol
ingn-
-he
temllytin
on-
-t.e.
sed
rcethe
as
conges
orcen tth
or-ig.
nce
ses
theceasske,
tions
ecu-ak
ly.and
he
aalr
tionare
henping
n-d-
ing
H2 /LQG primary controller is then designed using the ContToolbox in MATLAB ®, resulting in a dynamic compensatorK (s)of order six~the sum of the orders of the structure and the shapfilter!. The sensor noisesv are assumed uncorrelated with stadard [email protected]/12 s2, 0.01, 0.01, 0.035# times that of theground acceleration disturbance.
The secondary controller is given by
f SA5H f A if f Axb,0
0 otherwise(8)
where f A5 ‘‘desired’’ force that would be applied if using an active device andxb5velocity across the damper. Because tsmart damper is an intrinsically nonlinearenergy dissipationde-vice and cannot add mechanical energy to the structural sysfinding high-performance clipped-optimal controllers generarequires a numerical search over the parameters in the weighmatrix Q. This is the method used here. Note that effective ctrollers for smart damping devices typically haveprimary control-lers ~here, theH2 /LQG design! that command a dissipative ‘‘desired’’ force f A during the majority of the seismic even~Otherwise, the force would be set to zero a majority of the tim!The clipped-optimal controller is shown in Fig. 4~b!. Note that asaturation block is used to limit the peak forces as discuspreviously.
There is one unusual aspect to this control design. The fofed back to an observer is usually the force actually applied tosystem~e.g., Dyke et al. 1996a,b; Johnson et al. 2003!. Here, thatwould be f SA or a saturated version thereof. However, it wfound that feeding back the ‘‘desired’’ forcef A gave superiorperformance. The reason, perhaps, is due to the dissipationstraint enforced by Eq.~8!, which causes sudden on/off switchinof the smart damper force that induces transient step responsthe observer, thereby causing yet larger swings in both the fcommanded and actually applied. These swings were seecause larger accelerations, particularly at the base, than if‘‘desired’’ force is fed back. Thus, since good closed-loop perfmance is the objective, the ‘‘desired’’ force is fed back, as in F4~b!, for the results shown herein.
Fig. 4. ~a! Combined filter/structure model for which primary cotroller is designed.~b! Smart damper control strategy using clippeoptimal controller.
1092 / JOURNAL OF ENGINEERING MECHANICS / OCTOBER 2002
,
g
-
in
oe
Designing the ‘‘Optimal’’ Passive Isolation System
Lead-Rubber Bearings
In the design of lead-rubber bearings for this study, the influeof two parameters is considered, namely, the total yield forceQy
@expressed as a fraction of the total building (ba1superstructure) weight# and the preyield to postyield stiffnesratio K initial /Kyield . The postyield stiffness is held fixed atKyield
5kb5232 kN/m to obtain a fundamental period of 2.5 s oncelead plug has yielded. While the optimal value of the yield forQy will depend on the flexibility of the superstructure as wellthe excitation~Inaudi and Kelly 1993a,b!, for design earthquakehaving the severity and ‘‘character’’ of the El Centro earthquaSkinner et al.~1993! suggest typical values of the yield forceQy
on the order of 5% of the total weight of the building.Fig. 5 shows peak base drifts and peak absolute accelera
~maximum of base and structural accelerations over time! of the2DOF model as a function of the yield forceQy for several valuesof the stiffness ratioK initial /Kyield . The plots corresponding tomoderate events~left-hand side! show close agreement with thdesign yield force given by Skinner and his coworkers, partilarly regarding the reduction of base drift. Note that the peabsolute accelerations do decrease with increasing~but small!Qy—but only up toQy'4% of building weight. After that, inter-story drifts ~not shown! and accelerations increase significantTherefore, a lead-rubber bearing, designed for the El CentroHachinohe earthquakes~the moderate earthquakes!, with Qy
55% of the building weight andK initial /Kyield56, is designatedLRB1. Higher-stiffness ratios also give similar results, but tratio of six is more typical of that used in practice~Skinner et al.1993!. This designQy follows the results of Park and Otsuk~1999!, who compare different methods to determine an ‘‘OptimYield Ratio,’’ giving Qy from 4.3 to 5.0% of structure mass fomoderate earthquakes@peak ground acceleration~PGA! of0.35g#—this substantiates Skinner’s aforementioned suggesand the design here. The responses with this LRB1 designshown as circles on the graphs in Fig. 5. The LRB1 design is tused as the basis against which the other supplemental damdevices will be compared.
Fig. 5. Peak responses of lead-rubber bearing-isolated buildunder~a! moderate and~b! severe seismic actions
trocto
in-
as
iono
n.
ode-ized, arbas
uch
gh-peingthema
pri-p-and
xi-he
tpu
leraig.olud f1
-ub
sehe
artwitao-fo
ion,
th
2
r-
and
itseakdriftt ofe ofes. Ae isbaseboutriftand
e in-mestheod--
unda
theeak—
aredpeaks, as
thee atase
the
To achieve similar results for scaled versions of the El Cenearthquake, the yield force must be scaled by the same fa~Skinner et al. 1993!. Moreover, since the set of earthquakescludes severe events~Kobe and Northridge!, higher-yieldstrengths may be necessary. And indeed this is the caseclearly depicted in Fig. 5~right-hand side!: in order to obtainsignificant reductions in base drifts and moderate acceleratfor the severe ground motions, the yield force must be 13–17%the building weight, with a suitable stiffness ratio around teIndeed, Park and Otsuka~1999! find Qy in the range from 14 to18% to be best for more severe ground motions~PGA of 1.225g!.Hence, a second design, called LRB2, with yield forceQy
515% of the building weight and with stiffness ratiK initial /Kyield510, is also studied. The responses of the LRB2sign are denoted by triangles in Fig. 5. It should be emphasthat LRB designs for severe events, such as the LRB2 designnot common in practice; however, the concerns about largedrifts in strong near-fault ground motion~e.g., Hall et al. 1995;Heaton et al. 1995! have prompted researchers to consider sdesigns.
In the remainder of this study, the performance of the hidamping lead-rubber bearing LRB2 design and a smart damstrategy will be compared to the performance of the low-damplead-rubber bearing LRB1 design. The selection of LRB1 asbasis for comparison is supported by the fact that it is the optiLRB system for the~unscaled! El Centro earthquake.
Smart Controllable Damper
A thorough parameter study is performed to determine approateH2 /LQG weighting matrices for efficient controllable daming strategies. A family of controllers that decreases base driftabsolute accelerations~compared to the LRB1! is obtained for acontrollable smart damper. As mentioned previously, the mamum damper force is limited to 15% of the total weight of tbuilding using a saturation element~see Fig. 4!.
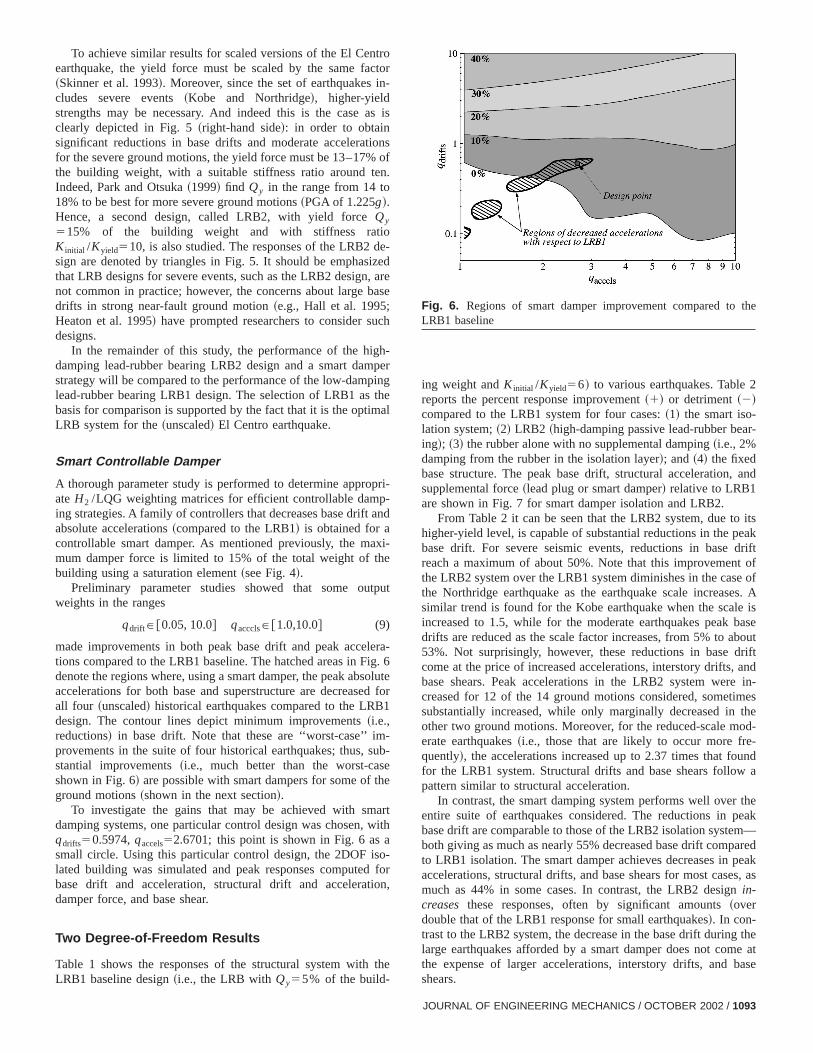
Preliminary parameter studies showed that some ouweights in the ranges
[email protected], 10.0# [email protected],10.0# (9)
made improvements in both peak base drift and peak accetions compared to the LRB1 baseline. The hatched areas in Fdenote the regions where, using a smart damper, the peak absaccelerations for both base and superstructure are decreaseall four ~unscaled! historical earthquakes compared to the LRBdesign. The contour lines depict minimum improvements~i.e.,reductions! in base drift. Note that these are ‘‘worst-case’’ improvements in the suite of four historical earthquakes; thus, sstantial improvements~i.e., much better than the worst-cashown in Fig. 6! are possible with smart dampers for some of tground motions~shown in the next section!.
To investigate the gains that may be achieved with smdamping systems, one particular control design was chosen,qdrifts50.5974,qaccels52.6701; this point is shown in Fig. 6 assmall circle. Using this particular control design, the 2DOF islated building was simulated and peak responses computedbase drift and acceleration, structural drift and acceleratdamper force, and base shear.
Two Degree-of-Freedom Results
Table 1 shows the responses of the structural system withLRB1 baseline design~i.e., the LRB withQy55% of the build-
r
is
sf
ee
r
l
t
-6teor
-
h
r
e
ing weight andK initial /Kyield56! to various earthquakes. Tablereports the percent response improvement~1! or detriment~2!compared to the LRB1 system for four cases:~1! the smart iso-lation system;~2! LRB2 ~high-damping passive lead-rubber beaing!; ~3! the rubber alone with no supplemental damping~i.e., 2%damping from the rubber in the isolation layer!; and~4! the fixedbase structure. The peak base drift, structural acceleration,supplemental force~lead plug or smart damper! relative to LRB1are shown in Fig. 7 for smart damper isolation and LRB2.
From Table 2 it can be seen that the LRB2 system, due tohigher-yield level, is capable of substantial reductions in the pbase drift. For severe seismic events, reductions in basereach a maximum of about 50%. Note that this improvementhe LRB2 system over the LRB1 system diminishes in the casthe Northridge earthquake as the earthquake scale increassimilar trend is found for the Kobe earthquake when the scalincreased to 1.5, while for the moderate earthquakes peakdrifts are reduced as the scale factor increases, from 5% to a53%. Not surprisingly, however, these reductions in base dcome at the price of increased accelerations, interstory drifts,base shears. Peak accelerations in the LRB2 system wercreased for 12 of the 14 ground motions considered, sometisubstantially increased, while only marginally decreased inother two ground motions. Moreover, for the reduced-scale merate earthquakes~i.e., those that are likely to occur more frequently!, the accelerations increased up to 2.37 times that fofor the LRB1 system. Structural drifts and base shears followpattern similar to structural acceleration.
In contrast, the smart damping system performs well overentire suite of earthquakes considered. The reductions in pbase drift are comparable to those of the LRB2 isolation systemboth giving as much as nearly 55% decreased base drift compto LRB1 isolation. The smart damper achieves decreases inaccelerations, structural drifts, and base shears for most casemuch as 44% in some cases. In contrast, the LRB2 designin-creases these responses, often by significant amounts~overdouble that of the LRB1 response for small earthquakes!. In con-trast to the LRB2 system, the decrease in the base drift duringlarge earthquakes afforded by a smart damper does not comthe expense of larger accelerations, interstory drifts, and bshears.
Fig. 6. Regions of smart damper improvement compared toLRB1 baseline
JOURNAL OF ENGINEERING MECHANICS / OCTOBER 2002 / 1093

r
6
9
9
Table 1. Two Degree-of-Freedom Peak Drifts, Absolute Accelerations and Forces for LRB1
Earthquake PGA~g!
Drift ~mm! Acceleration~mg! Base force~kN!
Base Structure Base Structure Lead Shea
0.53El Centro 0.1747 41.0 1.64 68.7 67.7 14.38 23.86
1.03El Centro 0.3495 82.9 2.41 109.1 99.3 14.83 34.06
1.53El Centro 0.5242 167.7 3.69 155.8 152.0 14.83 53.84
2.03El Centro 0.6990 300.6 5.82 234.7 239.5 14.83 84.74
0.53Hachinohe 0.1147 41.9 1.70 72.8 69.9 14.63 24.37
1.03Hachinohe 0.2294 92.6 2.50 111.6 103.0 14.83 36.38
1.53Hachinohe 0.3440 168.3 3.70 153.1 152.4 14.83 53.94
2.03Hachinohe 0.4587 312.1 5.99 240.2 246.6 14.83 87.34
0.53Kobe 0.4168 132.4 3.14 124.9 129.2 14.83 45.67
1.03Kobe 0.8337 265.3 5.38 233.3 221.7 14.83 76.48
1.53Kobe 1.2505 454.0 8.27 351.6 340.7 14.83 120.3
0.53Northridge 0.4214 231.7 4.70 198.3 193.6 14.83 68.65
1.03Northridge 0.8428 556.0 9.93 410.9 409.0 14.83 143.9
1.53Northridge 1.2642 1013.9 17.17 722.1 707.3 14.83 250.2
, in
bu
entled
en-renne
. oftwoseut
tingisorate
theuildsu
ters
heain
-p-
ricaach
aled
-10drift
t
ar-
Aforeen-
sed:, andgle
era-m-
.edureonseemes ofing
the
With regard to the peak forces, the LRB lead plugs attainedmost cases, their yield forces~for LRB1, Fyield5QPb
514.83 kN; for LRB2, Fyield5QPb548.05 kN!. The smartdamper uses rather smaller forces for small ground motionshits the saturation limit for strong ground motions~historical orlarger Northridge or Kobe motions!. Note that the peak forceexerted by the smart damper is well within the range of currtechnology. The peak force here was 53.39 kN for a scabuilding—for a similar full-scale structure, the forces can be gerated with parallel configurations of dampers based on curtechnology. For example, a prototype 200 kN semiactive magtorheological fluid damper has been developed at the UnivNotre Dame~Spencer and Sain 1997!. Typical force-displacemenloops are shown for two historical earthquakes in Fig. 8. Tobservations are important here. First, the smart isolation uforce levels similar to LRB1 in the El Centro earthquake, bmore like LRB2 for the stronger Kobe earthquake, demonstrathe adaptive nature of the smart isolation. Second, the smartlation has rounded corners on the loops, giving more modeacceleration levels than the LRB designs.
Influence of Higher Modes
To study the influence of higher modes on the performance ofbase isolation systems, the six degree-of-freedom isolated bing model depicted in Fig. 9 is used. The parameters of theperstructure are the same used in Kelly et al.~1987!, while theproperties of the isolation layer~i.e.,kb andcb! are the same as inthe 2DOF system described previously. The structural paramelisted in Table 3, give the same 2.5 s period,z52% isolationmode, and the same fixed-base fundamental 0.3 s,z52% modeas in the 2DOF problem.
This 6DOF structural model is numerically simulated for tsame isolation systems as studied for the 2DOF model. Agone LRB design~discussed further in the next paragraph! will beused as a baseline. The other strategies are:~1! the smart isolationsystem;~2! a second LRB design~high-damping passive leadrubber bearing!; ~3! the rubber alone with no supplemental daming ~i.e., 2% damping from the rubber in the isolation layer!; and~4! the fixed base structure. The same suite of unscaled histoearthquakes are used to determine ‘‘optimal’’ designs for e
1094 / JOURNAL OF ENGINEERING MECHANICS / OCTOBER 2002
t
t-
s
-
--
,
,
l
isolation method. Those designs are then simulated for unscand scaled ground motions.
Lead-Rubber Bearings
The optimal systems selected for the 2DOF structure~i.e., LRB1with yield force Qy55% of the weight of the building andpreyield to postyield stiffness ratioK initial /Kyield56, and LRB2with Qy515% andK initial /Kyield510! are also near-optimal leadrubber bearing designs for the 6DOF building model. Fig.depicts the peak responses of the 6DOF structure—peak baseand peak absolute acceleration~maximum over all levels,mb tom5!—as a function of the yield forceQy ~expressed as a percenof the building’s total weight! and for three different stiffnessratiosK initial /Kyield56,10,15. For moderate ground motions~left-hand-side plots!, the parameters selected for LRB1 are still neoptimal. ~Choosing aQy>4% would slightly improve peak accelerations, but with some increase in base drift.! For severeground motions~right-hand-side plots!, a yield force level of 15%is again nearly optimal, particularly for the Northridge record.stiffness ratio of six would result in smaller accelerationsKobe but with larger drifts. However, for consistency with th2DOF analysis—and in accordance with actual design recommdations~Kelly 1997; Naeim and Kelly 1999!—the stiffness ratiovalue ofK initial /Kyield510 is retained here also.
Smart Controllable Damper
For smart damping of the 2DOF system, four sensors were ubase drift and absolute accelerations of the base, the structurethe ground. The superstructure in the 2DOF model is a sinmass. Now, the 6DOF model has five distinct structural acceltions that may be measured. To allow for fair side-by-side coparison, the number~and type! of sensors will be held constant
If the controller designed for the 2DOF model is to be usdirectly for the 6DOF system, the only question is which structmass should be instrumented. Analyzing the frequency respof the superstructure of the 2DOF model and comparing thwith the frequency responses of the five superstructure massthe 6DOF model, it can be shown that the best correspondsuperstructure acceleration is the roof acceleration~massm5!.Now, it is possible to use the six-state controller designed for

achsper
llerr theht-
andnts
ared
ide
ndeak
forers
ixed
Tabl
e2.
Per
cent
Impr
ovem
ent~i.e.
,R
educ
tion!
Com
pare
dto
LRB
1fo
rTw
oD
egre
e-of
-Fre
edom
Mod
el~Pos
itive
Num
bers
are
Bet
ter
!
Ear
thqu
ake
PG
A~g !
Bas
eD
rift
Str
uctu
ralD
rift
Bas
eA
ccel
erat
ion
Str
uctu
ralA
ccel
erat
ion
Sup
plem
enta
lFor
ceB
ase
She
ar
Sm
art
LRB
2R
ubbe
rS
mar
tLR
B2
Rub
ber
Fix
edS
mar
tLR
B2
Non
eS
mar
tLR
B2
Rub
ber
Fix
edS
mar
tLR
B2
Sm
art
LRB
2R
ubbe
rF
0.53
ElC
entr
o0.
1747
3.4
5.1
228
5.6
33.1
211
7.8
253
.12
673.
020
.42
137.
72
49.7
33.0
211
7.8
253
.12
673.
418
.62
193.
135
.62
114.
62
54.0
253
4.5
1.03
ElC
entr
o0.
3495
4.3
13.1
228
1.9
8.7
289
.62
108.
82
954.
22
0.3
297
.82
88.6
8.7
289
.62
108.
82
954.
72
57.9
221
8.1
9.7
287
.72
115.
82
789.
0
1.53
ElC
entr
o0.
5242
29.0
35.9
218
3.2
10.6
240
.42
104.
52
932.
62
5.3
279
.52
98.0
10.5
240
.42
104.
52
933.
22
136.
82
222.
914
.32
35.4
210
4.8
274
3.7
2.03
ElC
entr
o0.
6990
47.2
51.7
211
0.6
24.3
20.
62
73.0
277
3.7
6.8
244
.52
75.3
24.3
20.
62
73.0
277
4.2
221
5.8
222
3.8
27.4
3.5
273
.52
614.
7
0.53
Hac
hino
he0.
1147
15.7
15.3
257
3.3
50.3
210
0.8
216
3.9
250
4.0
42.2
291
.42
150.
050
.32
100.
82
163.
92
504.
415
.92
181.
852
.32
103.
02
168.
72
401.
8
1.03
Hac
hino
he0.
2294
23.8
31.4
250
8.9
32.5
274
.82
258.
52
720.
524
.62
70.6
222
6.3
32.4
274
.82
258.
42
721.
02
65.9
221
9.4
36.0
270
.92
260.
02
572.
3
1.53
Hac
hino
he0.
3440
37.1
42.0
240
2.7
31.5
235
.22
263.
32
731.
617
.52
51.7
225
6.8
31.5
235
.22
263.
32
732.
22
148.
92
223.
735
.32
31.1
226
4.2
258
0.1
2.03
Hac
hino
he0.
4587
54.8
52.8
226
1.5
43.6
3.1
219
9.4
258
5.3
29.9
213
.82
203.
343
.63.
12
199.
42
585.
82
231.
82
224.
046
.75.
72
199.
92
460.
0
0.53
Kob
e0.
4168
39.3
24.3
245
.326
.02
58.7
2.2
283
4.4
31.9
298
.11.
126
.02
58.7
2.2
283
4.9
298
.12
223.
628
.82
56.3
2.0
266
5.2
1.03
Kob
e0.
8337
39.4
35.7
245
.113
.72
12.6
214
.12
989.
36.
12
65.3
25.
913
.72
12.6
214
.02
989.
72
260.
02
224.
014
.92
15.0
217
.02
813.
7
1.53
Kob
e1.
2505
45.1
26.8
227
.222
.92
3.9
211
.32
963.
22
4.2
242
.52
5.4
22.9
23.
92
11.3
296
3.8
226
0.0
222
4.0
26.8
24.
32
11.5
277
1.0
0.53
Nor
thrid
ge0.
4214
41.6
50.8
210
9.7
23.6
28.
72
64.4
272
9.2
26.2
212
.52
57.1
23.6
28.
72
64.4
272
9.7
217
0.3
222
3.9
26.4
28.
32
64.3
257
6.8
1.03
Nor
thrid
ge0.
8428
42.8
38.0
274
.725
.59.
92
55.6
268
5.0
17.0
4.0
251
.625
.59.
92
55.6
268
5.5
226
0.0
222
4.0
28.6
11.0
256
.72
545.
4
1.53
Nor
thrid
ge1.
2642
41.3
35.5
243
.731
.020
.22
35.0
258
1.0
16.1
17.6
229
.431
.020
.22
35.0
258
1.4
226
0.0
222
4.0
33.8
20.1
235
.22
456.
9
earthquakes are used to determine ‘‘optimal’’ designs for e50.5974 andqaccels52.6701# in the 6DOF structure as it requirethe same number and types of inputs. The resulting smart damstrategy gives good, but not quite optimal, results~not shown herefor the sake of brevity!.
Taking a further step to capitalize on a higher-order controbased on the 6DOF model, the same procedure described fo2DOF system is followed to design a controller with the weiging matrix
Q5diag~@qdrifts8 @1 0 0 0 0 0# qaccels8 @1 0 0 0 0 1## !(10)
~which weights the base drift, the absolute base acceleration,the absolute roof acceleration! and the same sensor measuremeas before~i.e., base drift, base, roof~massm5!, and ground accel-erations!. A new region of the weighting spaceqdrifts versusqaccels
was found where the smart damper reduces base drift compto LRB1 without increasing accelerations. Fig. 11~a close relativeof Fig. 6! shows the region where the smart damper can provreductions in base displacement~contour lines! while not increas-ing the floor accelerations~hatched region! for the suite of un-scaled historical earthquakes. From this optimal~hatched! zone, aparticular point was chosen~qdrifts531.1 andqaccels599.3! andthe 6DOF system simulated.
Six Degree-of-Freedom Results
Table 4 shows the results in terms of peak interstory drifts aabsolute accelerations at different floor levels, as well as p
Fig. 7. Peak base drift, structural acceleration, and damper forcethe two degree-of-freedom model relative to LRB1. Filled markdenote responses due to unscaled historical earthquakes.
JOURNAL OF ENGINEERING MECHANICS / OCTOBER 2002 / 1095

akes
Fig. 8. Force-displacement loops with LRB1, LRB2, and smart isolation of two degree-of-freedom system for two historical earthquuild-led
d toral
Fig.ta,
ualB1-rtedfore ofple
OFfor
eors
lera-can-ht
to beera-
Fg toith
andriftstwocor-
Fig. 9. Multi-degree-of-freedom~MDOF! models
Fig. 10. Peak seismic responses of LRB-isolated building~sixdegree-of-freedom model!
1096 / JOURNAL OF ENGINEERING MECHANICS / OCTOBER 2002
damper forces and base shears, for the 6DOF base-isolated bing model using the LRB1 system and excited by the unscaand scaled historical earthquakes. Percent improvements~positivevalues! and detriments~negative values! provided by the fixed-base structure and by the three isolation strategies compareLRB1 are reported in Table 5. The peak base drift, structuacceleration, and damper force relative to LRB1 are shown in12 for smart dampers and LRB2. To effectively analyze this datwo different viewpoints are used.
First, it is important to compare Tables 1 and 4, where actresponse values are reported for the 2DOF and 6DOF LRisolated building models. The close matches among the repovalues must be highlighted. Base drifts match almost perfectlyboth models under all input motions, regardless of the presenchigher-mode dynamics; this feature supports the use of simmodels~even single-degree-of-freedom superstructure models! asa reasonable tool during early stages of control design. The 2Dforce-displacement loops in Fig. 8 are extremely close to thosethe 6DOF~not shown here for brevity!. Absolute accelerations arquite comparable, particularly for large seismic scale factand/or severe earthquake action~Kobe and Northridge!, thoughwith slightly less agreement than base drifts. While base accetion can be compared in a unique way, structure accelerationnot since the 6DOF model has multiple floors. As one migexpect, the structural accelerations reported in Table 1 seemcomparable to the mean of the second and third floor acceltions reported in Table 4. Finally, interstory drifts~or structuraldrift! are difficult to compare. The values reported for the 2DOmodel are about three times larger than the value correspondinthe first floor of the 6DOF model, and the values decrease wthe structure’s height. The differences between the 2DOF6DOF results in superstructure accelerations and interstory dare largely due to the method used to reduce the model todegrees of freedom; the structure mass in the 2DOF roughly
Table 3. Structural Model Parameters~Kelly et al. 1987!
Floor masses~kg!
Stiffness coefficients~kN/m!
Damping coefficients~kN•s/m!
mb56800 kb 5 232 cb 5 3.74m155897 k1 5 33732 c1 5 67m255897 k2 5 29093 c2 5 58m355897 k3 5 28621 c3 5 57m455897 k4 5 24954 c4 5 50m555897 k5 5 19059 c5 5 38

ichre.
tivethery
arelins inrlyfo
eak
elloxith
ionsare
martvere
s-
eralThe
atedrom0 El
fthe
freuted
dseand
areer-reins ofke,as
ed-an
erofri-
hatngede-
igno theac-
B1
responds to the center-of-gravity of the superstructure, whwould be somewhere in the third story of the superstructuThus, the 2DOF structure drift corresponds more to the reladisplacement of the superstructure center-of-gravity relative tobase; to first order, this drift would be 2–3 times the first stodrift.
Second, considering Table 5 and Fig. 12, both LRB2 and smdampers effectively reduce the base drift compared to the basLRB1 design but only the smart damper makes improvementstructural acceleration for most ground motions. Note particulathat the smart damper decreases base drift nearly in halfthe strong events ~Kobe, Northridge, 2.03El Centro,2.03Hachinohe!; LRB2 is slightly less effective for some of thground motions, but still much better than LRB1. However, peaccelerations, structure interstory drifts, and base shears tdifferent story. LRB2 causes peak accelerations to be apprmately double the LRB1 design for moderate events, whereassmart damper is able to achieve good acceleration reductSimilar reductions in interstory drifts and base shears
Fig. 11. Regions of smart damper improvement compared to LRbaseline
te
r
a-e.
achieved. Consequently, due to its adaptive nature, the sdamper gives good performance for both moderate and seground motions.
Concluding Remarks
A ‘‘smart’’ base isolation system, comprised of low-damping elatomeric bearings, and ‘‘smart’’ controllable~semiactive! dampers,was shown to have superior performance compared to sevpassive base isolation designs using lead-rubber bearings.peak responses of 2DOF and 6DOF models of a base isolstructure due to several ground motions were computed fsimulation. The suite of earthquakes used herein were the 194Centro and 1968 Hachinohe~moderate events! and the 1995 Kobeand 1994 Northridge~severe events! earthquakes. The suite ohistorical earthquakes were scaled in magnitude to evaluatebase isolation systems during ground motions of differentquency content and various strengths. The responses compwere peak base and structural~relative! displacements, base anstructural ~absolute! accelerations, applied forces, and bashears. Two lead-rubber bearing designs, denoted LRB1LRB2 with bearing yield forceQy equal to 5 and 15% of thebuilding weight, respectively, were studied. These designstypical suggestions in the literature for protecting against modate and strong ground motions, respectively. It was shown hethat the LRB1 system is a near-optimal design for earthquakethe magnitude and ‘‘character’’ of the 1940 El Centro earthquaand the LRB2 system is appropriate for strong motions suchthe 1994 Northridge or 1995 Kobe earthquakes. A clippoptimal controller was developed for the smart damper usingH2 /LQG primary controller and a clipping secondary controllto enforce the dissipation requirement. A force saturation limit15% of the building weight was imposed to allow a fair compason with the LRB designs.
The conclusions from both 2DOF and 6DOF studies show tsmart dampers can provide superior protection from a wide raof ground motions, whereas the passive lead-rubber bearingsigns tend to be suboptimal for events different from their desearthquake. The LRB2 design reduces base drifts compared tLRB1 design, but only at the expense of significantly larger
ar
3.80
33.96
53.67
84.71
4.38
36.50
53.84
87.14
45.65
76.44
20.27
68.67
44.07
50.24
Table 4. Peak Drifts~mm!, Absolute Accelerations~mg!, and Damping Forces~kN! for LRB1 with Six Degree-of-Freedom Model
Earthquake PGA~g!
Drift ~mm! Acceleration~mg! Base Force~kN!
Base 1st 2nd 3rd 4th 5th Base 1st 2nd 3rd 4th 5th Lead She
0.53El Centro 0.1747 40.8 0.593 0.569 0.449 0.355 0.238 74.9 73.2 69.3 69.3 74.5 78.5 14.37 2
1.03El Centro 0.3495 82.4 0.868 0.855 0.690 0.556 0.380 117.7 112.5 101.1 101.7 114.9 125.1 14.83
1.53El Centro 0.5242 167.0 1.334 1.277 1.006 0.793 0.533 159.7 155.7 149.3 155.4 166.6 175.8 14.83
2.03El Centro 0.6990 300.5 2.075 1.965 1.531 1.195 0.796 235.1 239.7 239.5 242.2 253.3 262.4 14.83
0.53Hachinohe 0.1147 41.9 0.609 0.587 0.464 0.367 0.247 77.5 75.0 69.9 71.2 77.0 81.5 14.63 2
1.03Hachinohe 0.2294 93.2 0.901 0.890 0.723 0.586 0.402 124.5 120.1 110.4 105.0 120.3 132.5 14.83
1.53Hachinohe 0.3440 167.9 1.304 1.219 0.960 0.763 0.516 165.4 161.0 151.9 152.2 159.5 170.0 14.83
2.03Hachinohe 0.4587 311.2 2.106 1.958 1.497 1.148 0.754 242.1 243.9 245.2 246.0 247.1 248.4 14.83
0.53Kobe 0.4168 132.3 1.113 1.046 0.808 0.626 0.414 127.3 128.2 128.5 130.3 133.6 136.5 14.83
1.03Kobe 0.8337 265.1 1.884 1.792 1.403 1.107 0.742 232.2 229.8 220.5 219.9 233.1 244.5 14.83
1.53Kobe 1.2505 453.6 2.919 2.758 2.146 1.673 1.114 347.7 348.7 343.8 340.6 355.0 366.9 14.83 1
0.53Northridge 0.4214 231.8 1.654 1.559 1.215 0.949 0.633 206.0 203.6 197.6 193.7 201.3 208.5 14.83
1.03Northridge 0.8428 556.4 3.519 3.311 2.560 1.985 1.314 412.8 410.8 405.1 410.7 423.2 433.1 14.83 1
1.53Northridge 1.2642 1013.7 6.019 5.603 4.306 3.323 2.194 717.3 716.4 710.2 703.1 711.7 722.8 14.83 2
JOURNAL OF ENGINEERING MECHANICS / OCTOBER 2002 / 1097

der-be-
ure,ys-le-gepo-
omucetem
torymart
remefre-martnifi-
isNo.
ent
forers
xed
i,ti
i,ti
i,ti
-Ta
ble
5.P
erce
ntIm
prov
emen
t~i.e.
,R
educ
tion!
Com
pare
dto
LRB
1fo
rS
ixD
egre
e-of
-Fre
edom
Mod
el~Pos
itive
Num
bers
are
Bet
ter
!
Ear
thqu
ake
PG
A~g !
Bas
eD
rift
Str
uctu
ralD
rifta
Bas
eA
ccel
erat
ion
Str
uctu
ralA
ccel
erat
ion
aS
uppl
emen
tary
For
ceB
ase
She
ar
Sm
art
LRB
2R
ubbe
rS
mar
tLR
B2
Rub
ber
Fix
edS
mar
tLR
B2
Rub
ber
Sm
art
LRB
2R
ubbe
rF
ixed
Sm
art
LRB
2S
mar
tLR
B2
Rub
ber
Fi
0.53
ElC
entr
o0.
1747
14.1
3.0
228
8.7
35.2
211
1.7
250
.02
604.
729
.62
99.8
237
.426
.22
103.
72
33.6
266
2.4
8.4
219
4.0
34.8
211
6.1
254
.62
474.
6
1.03
ElC
entr
o0.
3495
15.1
13.1
228
4.4
11.5
278
.72
104.
82
862.
110
.52
82.4
274
.77.
42
85.0
267
.62
856.
62
77.6
221
8.1
8.6
288
.12
116.
72
705.
3
1.53
ElC
entr
o0.
5242
37.1
37.3
218
4.7
13.6
237
.92
99.9
283
9.3
1.0
257
.72
93.2
1.1
258
.52
79.0
292
1.6
216
6.4
222
2.9
13.2
234
.62
105.
72
664.
5
2.03
ElC
entr
o0.
6990
53.4
52.8
211
0.9
25.9
20.
62
71.3
270
5.0
10.3
223
.42
75.0
11.7
218
.72
59.9
281
2.3
225
5.2
222
3.8
26.7
4.4
273
.82
545.
8
0.53
Hac
hino
he0.
1147
23.0
15.7
256
9.5
48.8
297
.62
158.
62
447.
151
.72
80.1
213
3.3
48.8
282
.32
127.
12
547.
85.
62
181.
148
.22
102.
52
167.
42
336.
4
1.03
Hac
hino
he0.
2294
30.7
31.1
250
2.8
30.8
270
.92
249.
72
639.
939
.82
42.5
219
0.7
37.0
250
.62
179.
52
697.
22
86.2
221
9.4
30.8
270
.72
257.
22
483.
0
1.53
Hac
hino
he0.
3440
42.3
41.5
240
1.8
28.3
235
.92
262.
42
666.
932
.12
42.5
222
8.2
26.3
245
.42
226.
52
831.
52
179.
22
223.
729
.62
31.6
226
3.3
249
2.9
2.03
Hac
hino
he0.
4587
58.5
52.1
226
0.9
41.3
1.8
219
9.2
253
3.1
38.9
218
.22
198.
932
.82
22.4
219
8.1
275
0.3
226
0.0
222
4.0
42.1
5.1
219
9.3
238
8.4
0.53
Kob
e0.
4168
47.9
24.2
245
.515
.62
56.8
2.3
275
4.5
19.7
210
3.8
4.4
7.2
211
4.3
5.6
298
9.5
213
6.2
222
3.6
17.9
256
.41.
92
578.
1
1.03
Kob
e0.
8337
48.4
36.2
245
.35.
32
15.4
215
.42
909.
66.
32
55.4
24.
93.
02
68.9
25.
42
1116
.72
260.
02
224.
03.
52
14.6
217
.22
709.
9
1.53
Kob
e1.
2505
49.3
26.9
227
.419
.62
4.0
211
.72
877.
316
.22
26.8
25.
18.
82
39.0
25.
32
1116
.22
260.
02
224.
021
.42
4.2
211
.72
672.
1
0.53
Nor
thrid
ge0.
4214
45.4
50.6
210
9.8
19.4
29.
32
65.0
266
3.1
31.8
217
.12
51.7
18.8
222
.52
53.9
286
8.1
221
0.1
222
3.9
21.9
28.
42
64.4
248
9.7
1.03
Nor
thrid
ge0.
8428
46.0
37.9
274
.724
.39.
52
55.1
261
7.5
25.6
0.9
251
.421
.22
0.3
248
.22
832.
22
260.
02
224.
025
.411
.02
56.7
246
2.2
1.53
Nor
thrid
ge1.
2642
42.8
35.4
243
.929
.818
.92
36.0
252
9.2
30.7
13.9
230
.727
.912
.42
33.2
273
7.8
226
0.0
222
4.0
30.9
20.0
235
.32
385.
5a T
hese
valu
esar
eth
ech
ange
sin
max
imum
sov
eral
lst
orie
sof
the
stru
ctur
e;fo
rex
ampl
e,if
di(
t)de
note
sth
ein
ters
tory
drift
time
hist
ory
ofth
eith
floor
,th
enth
epe
rcen
tim
prov
emen
tis
give
nby
(max
udLR
B1 (t
)u2
max
udsy
stem
(t)u
)/m
axud
LRB
1 (t)u
310
0%,
whe
resy
stem
deno
tes
the
isol
atio
nsy
stem
.
1098 / JOURNAL OF ENGINEERING MECHANICS / OCTOBER 2002
celerations, structural interstory drifts, and base shears in moate earthquakes compared to the LRB1 design. This trade-offtween the various responses is well recognized in the literatand would be expected with other passive yielding isolation stems ~e.g., friction pendulum systems, metallic yielding suppmental dampers! as well. Such large accelerations can damasensitive equipment or cause damage to nonstructural comnents, potentially removing the structure and its contents frservice. A smart damper, due to its adaptive nature can redbase drifts as well, and sometimes better, than the LRB2 syswhile simultaneously reducing structural accelerations, intersdrifts, and base shears. Thus, the adaptable nature of the sdamper system allows a structure to be protected against extearthquakes, without sacrificing performance during the morequent, moderate seismic events. This study suggests that sdampers, such as magnetorheological fluid dampers, show sigcant promise for use in base isolation applications.
Acknowledgments
The writers gratefully acknowledge the partial support of thresearch by the National Science Foundation under GrantCMS 99-00234, by the LORD Corporation, and by a fellowshipfrom Consejo Nacional de Investigaciones Cientı´ficas y Tecnicas~Republica Argentina!.
References
Asher, J. W., Young, R. P., and Ewing, R. D.~1996!. ‘‘Seismic isolationdesign of the San Bernardino county medical center replacem
Fig. 12. Peak base drift, structural acceleration, and damper forcethe six degree-of-freedom model relative to LRB1. Filled markdenote responses due to unscaled historical earthquakes.

.’’ls,
rs.’’
ic
e-
-
Mw
res
res
-
d
l,
.
ve
lm
:
ndn
-
l
-
ew
re-
–
.’’
project.’’ J. Struct. Des. Tall Bldgs.,5, 265–279.AASHTO. ~1991!. ‘‘Guide specifications for seismic isolation design
American Association of State Highway and Transportation OfficiaWashington, D.C..
Dyke, S. J., Spencer, B. F., Jr., Sain, M. K., and Carlson, J. D.~1996a!.‘‘Seismic response reduction using magnetorheological dampeProc., IFAC World Congress, San Francisco, L:145–150.
Dyke, S. J., Spencer, B. F., Jr., Sain, M. K., and Carlson, J. D.~1996b!.‘‘Modeling and control of magnetorheological dampers for seismresponse reduction.’’Smart Mater. Struct.,5, 565–575.
Feng, Q., and Shinozuka, M.~1990!. ‘‘Use of a variable damper forhybrid control of bridge response under earthquake.’’Proc., U.S. Na-tional Workshop on Structural Control Research, USC PublicationNo. CE-9013.
Hall, J. F., ed.~1995!. ‘‘Northridge earthquake of January 17, 1994 rconnaissance report.’’Earthquake Spectra,11, Supplement C, Vol. 1.
Hall, J. F.~1999!. ‘‘Discussion of ‘The role of damping in seismic isolation’. ’’ Earthquake Eng. Struct. Dyn.,28, 1717–1720.
Hall, J. F., Heaton, T. H., Halling, M. W., and Wald, D. J.~1995!. ‘‘Near-source ground motion and its effects on flexible buildings.’’Earth-quake Spectra,11~4!, 569–605.
Heaton, T. H., Hall, J. F., Wald, D. J., and Halling, M. V.~1995!. ‘‘Re-sponse of high-rise and base-isolated buildings in a hypothetical7.0 blind thrust earthquake.’’Science,267, 206–211.
Inaudi, J. A., and Kelly, J. M.~1993a!. ‘‘Hybrid isolation systems forequipment protection.’’Earthquake Eng. Struct. Dyn.,22, 297–313.
Inaudi, J. A., and Kelly, J. M.~1993b!. ‘‘Optimum damping in linearisolation systems.’’Earthquake Eng. Struct. Dyn.,22, 583–598.
International Conference of Building Officials~ICBO!. ~1994!. Uniformbuilding code, earthquake regulations for seismic-isolated structu,Vol. 2, Appendix Chapt. 16, Whittier, Calif.
International Conference of Building Officials~ICBO!. ~1997!. Uniformbuilding code, earthquake regulations for seismic-isolated structu,Vol. 2, Appendix Chapt. 16, Whittier, Calif.
Johnson, E. A., Baker, G. A., Spencer, B. F., Jr., and Fujino, Y.~2003!.‘‘Semiactive damping of stay cables.’’J. Eng. Mech., in press.
Johnson, E. A., Ramallo, J. C., Spencer, B. F., Jr., and Sain, M. K.~1999!.‘‘Intelligent base isolation systems.’’Proc., 2nd World Conf. on Structural Control, Kyoto, Japan, Vol. 1, 367–376.
Kelly, J. M. ~1997!. Earthquake-resistant design with rubber, 2nd Ed.,Springer, New York.
Kelly, J. M. ~1999a!. ‘‘The role of damping in seismic isolation.’’Earth-quake Eng. Struct. Dyn.,28, 3–20.
Kelly, J. M. ~1999b!. ‘‘The current state of base isolation in the UniteStates.’’Proc., 2nd World Conf. on Structural Control, Kyoto, Japan,Vol. 1, 1043–1052.
Kelly, J. M., Leitmann, G., and Soldatos, A. G.~1987!. ‘‘Robust controlof base-isolated structures under earthquake excitation.’’J. Optim.Theory Appl.,53, 159–180.
Kelly, J. M., and Tsai, H.-C.~1985!. ‘‘Seismic response of light internaequipment in base-isolated structures.’’Earthquake Eng. Struct. Dyn.13, 711–732.
Kelly, J. M., and Tsai, H.-C.~1993!. ‘‘Seismic response of heavilydamped base isolation systems.’’Earthquake Eng. Struct. Dyn.,22,633–645.
Kikuchi, M., and Aiken, I. D.~1997!. ‘‘An analytical hysteresis model forelastomeric seismic isolation bearings.’’Earthquake Eng. StructDyn., 26, 215–231.
Kurata, N., Kobori, T., Takahashi, M., Niwa, N., and Hiroshi, M.~1999!.‘‘Actual seismic response controlled building with semi-actidamper.’’Earthquake Eng. Struct. Dyn.,28~11!, 1427–1447.
Makris, N. ~1997!. ‘‘Rigidity-plasticity-viscosity: Can electrorheologicadampers protect base isolated structures from near-source groundtions?’’ Earthquake Eng. Struct. Eng.,26, 571–591.
Naeim, F., and Kelly, J. M.~1999!. Design of seismic isolated structuresFrom theory to practice, Wiley, Chichester, England.
o-
Nagarajaiah, S.~1994!. ‘‘Fuzzy controller for structures with hybrid iso-lation system.’’Proc., 1st World Conf. on Structural Control, LosAngeles, TA2, 67–76.
Nagarajaiah, S., Riley, M. A., and Reinhorn, A.~1993!. ‘‘Control ofsliding-isolated bridge with absolute acceleration feedback.’’J. Eng.Mech.,119~11!, 2317–2332.
Nagarajaiah, S., and Xiaohong, S.~2000!. ‘‘Response of base-isolatedUSC hospital building in Northridge Earthquake.’’J. Struct. Eng.,126~10!, 1177–1186.
Niwa, N., Kobori, T., Takahashi, M., Matsunaga, Y., Kurata, N., aMizuno, T. ~1999!. ‘‘Application of semi-active damper system to aactual building.’’ Proc., 2nd World Conf. on Structural Control,Kyoto, Japan, Vol. 1, 815–824.
Park, J., and Otsuka, H.~1999!. ‘‘Optimal yield level of bilinear seismicisolation devices.’’Earthquake Eng. Struct. Dyn.,28, 941–955.
Reinhorn, A. M., and Riley, M.~1994!. ‘‘Control of bridge vibrationswith hybrid devices.’’Proc., 1st World Conf. on Structural Control,Los Angeles, TA2, 50–59.
Reinhorn, A. M., Soong, T. T., and Wen, C. Y.~1987!. ‘‘Base-isolatedstructures with active control.’’Proc., ASME PVP Conf., San Diego,PVP-127, 413–420.
Schmitendorf, W. E., Jabbari, F., and Yang, J. N.~1994!. ‘‘Robust controltechniques for buildings under earthquake excitation.’’EarthquakeEng. Struct. Dyn.,23, 539–552.
Skinner, R. I., Robinson, W. H., and McVerry, G. H.~1993!. An introduc-tion to seismic isolation, Wiley, Chichester, England.
Soong, T. T., and Dargush, G. F.~1997!. Passive energy dissipation systems in structural engineering, Wiley, New York.
Soong, T. T., and Grigoriu, M.~1993!. Random vibration of mechanicaand structural systems, Prentice-Hall, Englewood Cliffs, N.J.
Spencer, B. F., Jr.~1986!. ‘‘On the reliability of nonlinear hysteretic structures subjected to broadband random excitation.’’Lecture notes inengineering, C. A. Brebbia and S. A. Orszag, eds., 21, Springer, NYork.
Spencer, B. F., Jr., Johnson, E. A., and Ramallo, J. C.~2000!. ‘‘‘Smart’isolation for seismic control.’’JSME Int. J., Ser. C,43~3!, 704–711.
Spencer, B. F., Jr., and Sain, M. K.~1997!. ‘‘Controlling buildings: A newfrontier in feedback.’’IEEE Control Syst. Mag.,17~6!, 19–35.
Symans, M. D., and Constantinou, M. C.~1999!. ‘‘Semi-active controlsystems for seismic protection of structures: A state-of-the-artview.’’ Eng. Struct.,21, 469–487.
Symans, M. D., and Kelly, S. W.~1999!. ‘‘Fuzzy logic control of bridgestructures using intelligent semi-active seismic isolation.’’EarthquakeEng. Struct. Dyn.,28, 37–60.
Taylor, D. P., and Constantinou, M. C.~1996!. ‘‘Fluid dampers for appli-cations of seismic energy dissipation and seismic isolation.’’Tech.Rep., Taylor Devices, Inc., North Tonawanda, N.Y.~An updated ver-sion of this report is on the web at^http://www.taylordevices.com/dampers.htm&!.
Wang, Y. P., and Liu, C. J.~1994!. ‘‘Active control of base-isolated struc-tures under strong earthquakes.’’Proc., 5th USA National Conf. onEarthquake Engineering, Chicago, July 10–14, 1994, Vol. 1, 565574.
Wen, Y. K. ~1976!. ‘‘Method for random vibration of hysteretic systemsJ. Eng. Mech. Div.,102~2!, 249–263.
Yang, J. N., Wu, J. C., Reinhorn, A. M., and Riley, M.~1996!. ‘‘Controlof sliding-isolated buildings using sliding-mode control.’’J. Struct.Eng.,122~2!, 179–186.
Yoshida, K., Kang, S., and Kim, T.~1994!. ‘‘LQG control andH` controlof vibration isolation for multi-degree-of-freedom systems.’’Proc.,1st World Conf. on Structural Control, Los Angeles, TP4, 43–52.
Yoshida, K., Yoshida, S., and Takeda, Y.~1999!. ‘‘Semi-active control ofbase isolation using feedforward information of disturbance.’’Proc.,2nd World Conf. on Structural Control, Kyoto, Japan, Vol. 1, 377–386.
JOURNAL OF ENGINEERING MECHANICS / OCTOBER 2002 / 1099





























