Embed Size (px)
Citation preview

+= sn
THE PRACTICAL CALCULATION OF THE AERODYNAMIC
CHARACTERISTICS OF SLENDER FINNED VEHICLES
by
James. S. Barrowman
A Dissertation Submitted to the Faculty of the School of Engineering
and Architecture of The Catholic University of America in Partial
Fulfillment of the Requirements for the Degree of Master of Science
in Aerospace Engineering.
March 1967
Washington, D. C.
https://ntrs.nasa.gov/search.jsp?R=20010047838 2018-09-08T11:52:00+00:00Z

This dissertationwasapprovedbyDr. ShuJ. Ying
AssistantProfessorof SpaceScienceandAppliedPhysics
as Director andby
asReader.Dr. Hsing-PingPao
ii

ACKNOWLEDGMENTS
I would like to express my sincere appreciationto Dr. ShuJ. Ying andDr.Hsing°PingPaoof the Departmentof SpaceScienceandAppliedPhysicsfor theirhelpful suggestionsconcerningthis dissertation, I wouldalso like to expressmythanksto Mr. EdwardMayoinparticular andthe staff of GoddardSpaceFlight Centerin generalfor their helpfulnessandpatiencewhilepreparingthis report.
iii

TABLE OF CONTENTS
Page
ACKNOWLEDGEMENTS .............................................. iii
TABLE OF CONTENTS .............................................. iv
LIST OF FIGURES ................................................. v
LIST OF SYMBOLS ................................................. vi
I. SYNPOSIS ..................................................... 1
2. INTRODUCTION ................................................. 1
3. NORMAL FORCE AERODYNAMICS .................................... 2
4. AXIAL FORCE AERODYNAMICS ...................................... 42
5. COMPARISON WITH EXPERIMENTAL DATA ............................. 62
6. CONCLUSIONS .................................................. 74
7. REFERENCES .................................................. 75
APPENDIX A - Exerpt of Aerodynamic Theory From Reference 1 .................. 77
iv

Figure
3-i
3-2
3-3
3-4
3-5
3-6
3-7
3-8
3-9
3-10
3-11
3-12
4-1
4-2
4-3
4-4
4-5
4-6
4-7
4-8
5-1
5-2
5-3
5-4
5-5
5-6
5-7
5-8
5-9
5-10
LIST OF FIGURES
Fin Dihedral Angle ..........................................
Fin Geometry ............................................. 7
Proportionality Triangle for Chord ............................... 8
Fin Cant Angle ............................................. 12
Forces Due to Fin Cant ....................................... 13
Roll Damping Parameters ..................................... 14
Body Component Shapes ....................................... 19
Approximate Tangent Body .................................... 22
Supersonic I_¢r> ........................................... 33
Subsonic XB(_} ............................................ 34
Supersonic ×B_,r)........................................... 38
Pitch Damping Parameters .................................... 39
Skin Friction Coefficient ...................................... 44
Skin Friction With Roughness ................................... 45
Supersonic C% Variation ..................................... 49
Cylinder Drag Variation ...................................... 51
Leading Edge Drag .......................................... 52
Two Dimensional Base Pressure ................................ 54
Nose Pressure Drag at Mach One ................................ 58
Three Dimensional Base Pressure ............................... 61
Aerobee 350 .............................................. 63
Aerobee 350 Normal Force Coefficient Derivative ..................... 64
Aerobee 350 Center of Pressure ................................. 65
Tomahawk ............................................... 67
Tomahawk Roll Forcing Moment Coefficient Derivative ................. 68
Basic Finner .............................................. 69
Basic Finner Roll Damping Moment Coefficient Derivative ............... 70
Aerobee 150A ............................................. 71
Aerobee 150A Drag Coefficient .................................. 72
Aerobee 150A Reynolds Number ................................. 73
Page
5
V

Symbol
A
AB
AB r
AB s
Ar
A T
AwB
AWB^
A WN
AWN̂
A Ws
A WsA
AR
a
B 3
CD
C DB
C%T
CD f
CDLT
CDp
CDTT
%.
LIST OF SYMBOLS
Description
Area
Base Area
Base Area of One Fin
Nose Base Area
Conical Shoulder or Boattail Base Area
Reference Area
Planform Area of One Exposed Fin Panel
Total Body Wetted Area
Wetted Area of Booster Nose Afterbody
Nose Wetted Area
Wetted Area of Sustainer Nose and the Cylindrical Afterbody Between the Noseand the Shoulder. If there is no Shoulder, the Afterbody is Taken as the Remain-
der of the Sustainer.
Conical Shoulder or Boattail Wetted Area
Wetted Area of the Shoulder or Bottail and the Portion of the Sustainer Aft of
the Shoulder or Boattail
Aspect Ratio of Exposed Fin
Ambient Speed of Sound
Third Order Busseman Irreversibility Coefficient
Drag Coefficient, D
Base Drag Coefficient
Tail Trailing Edge Drag Coefficient
Skin Friction Drag Coefficient
Tail Leading Edge Dra_ Coefficient
Pressure Drag Coefficient
Total Drag Coefficient
Tail Thickness Drag Coefficient
Wave Drag Coefficient
vi

Symbol
cf
Cf c
C I
C,P
C_
C
Cq
%
Cp
C
CMA
C r
C t
D
d
d_
dS
F
fB
f_
fN
fN^
fs^
h
K,k
KI
K2
Description
Incompressible Skin Friction Coefficient
Compressible Skin Friction Coefficient
Rolling Moment Coefficient, _/qA r L r
(PL_ PL rRoll Damping Moment Coefficient Derivative, _c_/_ \TV] _ 2-_ : o
Roll Forcing Moment Coefficient Derivative, _C_/_ ,_ _ = 0
Pitch Moment Coefficient, _/_ArL r
Pitch Damping Moment Coefficient Derivative, _cm/_ (_) _ --qLr2V= 0
Normal Force Coefficient, n/_A
Normal Force Coefficient Derivative, _CN,/_ @_ = 0
Pressure Coefficient, 5P '_
Cord Length
Mean Aerodynamic Chord
Fin Root Chord
Fin Tip Chord
Aerodynamic Drag Force
Diameter
Diameter of Nose Base
Diameter of Shoulder or Boattail Base
Force
Total Body Fineness Ratio
Diederich's Planform Correlation Parameter for Fins
Equivalent F_neness Ratio of a Truncated Cone
Nose Fineness Ratio
Fineness Ratio of the Nose and Nose Afterbody
Fineness Ratio of the Shoulder or Boattail and Shoulder Afterbody
Fin Trailing Edge Thickness
Interference Factors and General Constants
First Order Busseman Coefficient
Second Order Busseman Coefficient
vii

Symbol Description
Third Order Busseman Coefficient
Length
Reference Length
Location of Shoulder or Bottail Measured from the Nose Tip
Fin Root Leading Edge Wedge Length
Nose Length
Total Body Length
Shoulder or Bottail Length
Location of Fin Leading Edge Intersection with Body, Measured from Nose Tip
Fin Root Trailing Edge Wedge Length
Roll Moment About Longitudinal Axis
Mach Number
Cotangent rL Pitch Moment About Center of Gravity
Number of Fins (3 or 4)
Normal Aerodynamic Force
Prandtle Factor, I/-
Prandtle Factor for Swept Fins, 1//1 - M~ cos2 rc Roll Rate
Pitch Rate
Dynamic Pressure
Reynolds Number
Surface Roughness Height
Fin Leading Edge Radius
Body Radius at Tail
Exposed Fin Semispan Measured from Root Chord
Maximum Fin Thickness
Velocity
Body Volume
Downwash Velocity

Symbol
XCG
XL T
Y
YMA
VL
r T
V1
C2
-y
_L
A
Description
Center of Gravity Location Measured from Nose Tip
Distance Between Fin Root Leading Edge and the Fin Tip Leading Edge
Measured Parallel to the Root
Longitudinal Center of Pressure Location Measured from Nose Tip
Spanwise Center of Pressure Location Measured from the Longitudinal Axis
Spanwise Location of C_A Measured from the Root Chord
Angle of Attack
Supersonic, - 1; Subsonic, _'_ - M2
Midchord Line Sweep Angle
Quarter Chord Sweep Angle
Leading Edge Sweep Angle
Trailing Edge Sweep Angle
First Region Boundary Sweep Angle
Second Region Boundary Sweep Angle
Ratio of Specific Heats
Fin Leading Edge Wedge Half Angle in a Plane Parallel to the Flow
Fin Trailing Edge Wedge Half Angle in a Plane Parallel to the Flow
Incidence of Surface to Flow in a Plane Parallel to the Flow
Fin Dihedral Angle
Fin Taper Ratio, c t 'C r
Mach Angle
Ambient Kinematic Viscosity
Ambient Density
Nose Tip Half Angle
s + r tRatio
r t
ix

Subscripts
B
B(T)
cr
N
i"
S
T
T(B)
t
W
1
Body
Body in the Presence of the Tail
Critical Value
Nose
Root
Conical Shoulder or Boattail
Tail
Tail in the Presence of the Body
Tip
Wetted
Value for one fin
X

1.00 SYNPOSIS
The basic objective of this thesis is to provide a practical method of computing the aerodynam-
ic characteristics of slender finned vehicles such as sounding rockets, high speed bombs, and
guided missiles. The aerodynamic characteristics considered are the normal force coefficient
derivative, CN_; center of pressure, _; roll forcing moment coefficient derivative, C_s; roll damping
moment coefficient derivative, C_p; pitch damping moment coefficient derivative, cq ; and the drag
coefficient, CD. Equations are determined for both subsonic and supersonic flow. No attempt is
made to analyze the transonic region. The general configuration to which the relations are applic-
able is a slender axisymmetric body having three or four fins.
The fins and body are analyzed separately; and the interference between them is accounted for
when they are combined to form the total vehicle. When necessary, both the fins and the body are
subdivided. Both purely theoretical and semi-empirical methods are used in deriving the equations.
Use is made of established methods when they are applicable.
Since the high speed digital computer is a tool readily available to the contempory engineer, no
effort has been made to linearize higher order theories or simplify complex relations. In many
cases, the equations are derived with the computer in mind.
The method is applied to sounding rocket vehicles and the results are compared to respective
windtunnel and flight data. The comparison indicates that the theory predicts aerodynamic charac-
teristics within ten percent of the experimental data.
2.00 INTRODUCTION
2.10 BACKGROUND
In order to study the performance of a new or existing flight vehicle the engineer must have
the vehicles aerodynamic characteristics. Windtunnel or flight tests can prov{de the needed infor-
mation; but they are both expensive and time consuming. Lacking either time or money the engineer
turns to theoretical predictions.
In this day of rockets and high speed armaments, slender finned vehicles are of considerable
interest. A great deal of work has been done on the aerodynamics of such configurations. The list
of contributors is exhaustive. However, a.number of works stand out and are of particular interest.
Munk, reference 20, developed the technique of slender body theory and applied it to low speed
airships. Tsien, reference 29, later modified Munks technique to apply it to pointed projectiles in
supersonic flow. Jones, references 7, 8, 9, extended Munk's work to finite wings and also provided
excellent application of conical flow theory to wing lift and drag estimation. Nielsen, Pitts, Ferrari,
and Morikawa, references 22, 3, 18 and 17, have thoroughly analyzed wing-body interference effects.
Even though they provide valuable understanding, many of the contributions have limited appli-
cability to practical calculations. Their inherent assumptions and approximations reduce the ac-
curacy and reliability of their results. Those that provide accuracy are usually so complex or

abstractthey cannotdirectly providethedesiredaerodynamiccharacteristics. This thesisis anattemptto form concrete,usefulexpressionsby applyingthebestabstract theoreticaltreatmentsaswell as reliable empirical data.
2.20 STATEMENTOF PROBLEM
Determinea set of expressionsfor thepractical calculationof the aerodynamiccharacteristicsof slender,axisymmetricfinnedvehiclesat bothsubsonicandsupersonicspeeds.Thecharacteris-tics of interestare the normalforcecoefficientderivative, CN_; centerof pressure,X; roll forcingmomentcoefficientderivative,C_; roll damping moment coefficient derivative, C; ; pitch damping
_p
moment coefficient derivative, Cmq; and drag coefficient, CD.
2.30 GENERAL METHOD OF SOLUTION
1. Divide vehicle into body and tail.
2. Analyze the body and tail separately. Subdivide either when necessary.
3. Analyze wing-body interference.
4. Recombine to form total vehicle solution.
2.40 GENERAL ASSUMPTIONS
1. The angle-of-attack is very near zero.
2. The flow is steady and irrotational.
3. The vehicle is a rigid body.
4. The nose tip is a sharp point.
3.0 NORMAL FORCE AERODYNAMICS
There are a number of aerodynamic coefficient derivatives that are directly dependent on the
aerodynamic forces acting normal to the longitudinal axis of the vehicle. The normal forces acting
on the fins are generated by four main sources; angle-of-attack; fin cant angle, roll rate, and pitch
rate. These excitations produce the normal force coefficient derivative, CN_, at a center of pressure,
& V; a roll forcing moment coefficient derivative, C4_; a roll damping moment coefficient derivative,
Cy ; and a pitch damping moment coefficient derivative, C q respectively. The only normal force,p
acting on the body is due to the angle of attac_k. This is the normal force at a center of pressure.
3.10 TAIL NORMAL FORCE AERODYNAMICS
3.11 TAIL NORMAL FORCE COEFFICIENT DERIVATIVE
In subsonic flow, the semi-empirical method of Diederich from reference 2 gives the normal
force coefficient derivative of a finite thin plate as;

Af
42 +Fp +--
where;
%_0 = Normal Force Coefficient Derivative of a two dimensional airfoil.
FD = Diederich's Planform Correlation Parameter.
According to Diederich;
ARF D : 1
2---#%=o cos Fc
By the thin airfoil theory of potential flow (reference 26),
C__a 0 = 27
Correcting this for compressible flow according to Gothert's rule (reference 26)
(3-1)
(3-2)
(3-3)
27 (3-4)CN ° - 13
Thus;
J_ (3-5)FD - cos Fc
Substituting equations (3-4) and (3-5) into (3-1) and simplifying,
) 27 _ (Af "Ar] (3-6)C-Na --
This is the value for one fin.
The value of (_)_ for one fin in supersonic flow is computed using the method of reference 1,
as given in Appendix A. It is essentially a strip theory which analyses two dimensional strips using
Busemann's Third order expansion of the compressible flow equations.
2 K3 3 B3V_ (3-7)Cpi : KI _i + K2 "_i + "Oi +
where;
Kz = 2/z
(T + I) M 4 - 4,_ 2K 2 =
4Z"

K3 = (W + i) Ms + (2_ - 7W- S) M_ + 10('y+ i) M4 - 12M 2 + 86/3 7
1B3 = (5,+ I) M4 [(S - 37) M4 + 4('>'- 3) Ms + 8] 4-'8
The strip values are then summed in a spanwise direction with a correction applied to those strips
that are intersected by the fin tip mach cone. The most distinct advantage of the method in reference
1 is that it includes a thickness distribution in the analysis.
To apply the C.N_ of one fin to a multi-finned vehicle the effect of fin dihedral must be con-
sidered. Only three and four finned vehicles are analyzed, since these are the most commonly
used. Both are analysed assuming that one fin is in a plane parallel to the flow. Reference 13 de-
rives the effect of dihedral on the CN= of tWO fin panels at very small angles of attack.
Figure 3-I defines the dihedral angle, A.
A three (3) fin configuration has two effective panels at a 30 ° dihedral angle. Thus the tail
normal force derivative is,
(3-9)
=)T 4 (4 fins) (3-10)
From equations 3-9 and 3-10 we can generalize for three and four fin vehicles.
N
Since the dihedral angle of the two effective panels of a four (4) fin configuration is zero, the tail
normal force derivative is;

_y
Figure 3-1-Fin Dihedral Angle (As Viewed From Rear)

Substituting 3-6 into 3-11, for subsonic flow;
(c__) T Nv PR (Af/A) (3-12)
V/4 f 'f2 + + \cos Fc]
3.12 TAIL CENTER OF PRESSURE LOCATION
From the thin airfoil theory of subsonic potential flow, reference 26, the center of pressure of
a two dimensional airfoil is located at 1/4 the length of its chord from its leading edge. Thus, on
a three dimensional fin, the center of pressure is located along the quarter chord line. By defini-
tion, the center of pressure is also located along the mean aerodynamic chord of the fin. There-
fore, by the above argument, the subsonic fin center of pressure is located at the intersection of
the quarter chord line and the mean aerodynamic chord. In this treatment, the subsonic center of
pressure is considered to remain constant with mach number. It remains to determine the length
and position of the mean aerodynamic chord.
The mean aerodynamic chord is defined as;
f0
1 c 2 dy (3-13)CMA -- _f
Figure 3-2 shows the fin coordinate system. The generalized chord is a function of the spanwise
coordinate. To find this function, a proportionality relation is set up. See figure 3-3.
c,_ c = ct (3-14)L_ L-y L* -s
It is assumed that the fin edges are all straight and form a trapizoid. From the first two terms of
equation 3-14;
c = c - Y---c, (3-15)• L*
From the first and last terms of equation 3-14;
CtL* : c rL* -c S
Simplifying, and defining;
C
_. =_L (3-16)C t

iMEAN
AERODYNAMIC
CHORD
lIMA
\\
\
Figure 3-2-Fin Geometry
Ict
,QUARTER-CHORD
LINE
)-CHORD LINE
c t

c r
-,_-Y _-_ L*-Y
L*
Figure 3-3-Proportionality Triangle for Chord

we find;
Lo = s (3-17)
Substituting3-17 into 3-15,
c = cr (1 + ky) (3-18)
where,
I )_-Ik - ----
L* s(3-19)
Using 3-18 in 3-13;
c2 fo'rc_^ =_ (1 + ky) 2 dy(3-20)
Integrating
C 2r
c_^ - Af 3k--- [(1 +ks) 3 - 1]
= r--L- 1 +ks +3 sCMA A f
(3-21)
Substituting3:19 into 3-21 and simplifying;
1 C2 S
• [}2 +_+1]CM^ = 3 Af
(3-22)
But;
1A,=_(% +c t) s (3-23)
thus;
2 c2
[\_ +_+1]CMA 3 C r + C t

or,
CMA ='3" r _ Ct Cr + Ct
(3-24)
To find the spanwise location of %^, equate 3-24 and 3-18 and solve for y.
3- r+Ct =c r 1+ yC r + C t S
or
I'_ 2cr ct 1 sc
Y_^ (% +c,) 3(% +c t) " c -c,(3-25)
After much algebra;
s ICr +2Ct 1 (3-26)
The spanwise subsonic center of pressure coordinate is then;
YT ---: r t +_- + C t J
(3-27)
As can be seen from figure 3-1, the longitudinal coordinate is;
1= 17 + lu^ + _-cM^
(3-28)
But;
YMA
J'MA = YMA tan r L = -- x t .s
(3-29)
Combining equations 3-24, 3-26, 3-28, and 3-29;
x t c + 2c t + Cr Cr + CtT_r : 17 +Y ; c--_-j 5 +c (3-30)
The fin center of pressure in supersonic flow is found by the method of reference 1 in appendix A.
10

3.13 TAIL ROLL FORCINGMOMENTCOEFFICIENTDERIVATIVE
A forcearises ona fin at zeroangleof attackif thefin is cantedat ananglewith the longitu-dinal axis. Seefigure 3-4. Thecantangleis aneffectiveangle-of-attack. As canbeseeninfigure 3-5, thetotal force resulting from cantingall the fins at the sameangleis zeroonthreeandfour fin configurations.However,a roll forcing momentaboutthe longitudinalaxis is produced.Sincethecantangleactsas aneffectiveangleof attacktheroll forcing momentis subsonicflowmaybewritten in terms of (C_)_;
a I
The values of (C_), and VT are found using equations 3-6 and 3-27 respectively. The rolling moment
coefficient is defined as,
(3-32)C_ : _A L
thus; using equation 3-26;
N YT CN_ 8
' (3-33)Cj_: Lr
The roll forcing moment coefficient derivative is defined as;
c _C4 : (3-34)
thus; the subsonic roll forcing coefficient derivative is,
7 r
In supersonic flow, C_:s is computed using the method of reference 1 as given in appendix A.
This method determines the roll forcing moment of each strip and sums them in a spanwise direction.
3.14 TAIL ROLL DAMPING MOMENT COEFFICIENT DERIVATIVE
When the vehicle has a roll velocity, the superposition of the local tangential velocity of the fin
panel on the free stream velocity produces a local angle-of-attack which is a function of spanwise
position. The local angle-of-attack produces a local force distribution along the fin. For three
and four fin configurations the total resulting force is zero, as shown previously. The moment pro-
duced about the longitudinal axis opposes the roll rate (see figure 3-6) and is a roll damping moment.
The local rolling moment at _ is,
11

V
J
Figure 3-4-Fin Cant Angle
12

(A)
F"
-'-F
(e)
F
T/,
F"
F
VIEWS LOOKINGFORWARD
Figure 3-5-Forces Due to Fin Cant
13

TOP VIEW
• I
X
,.y
F(()_a(()
S+r t
VIEW FROM REAR
F
_v
LOCAL
ANGLE -OF-ATTACK
Figure 3-6-Roll Damping Parameters
14

The local angle of attack at 4 is,
dt : (F(_) (3-36)
(3-37)
But;
v(_) : - P _7
Thus;
(3-38)
For v >>P,_ the local angle-of-attack is near zero, thus;
_,(,_) - - -- (3-39)V
In subsonic compressible flow the local normal force on an airfoil strip is found using equation 3-4.
v(:) - %,0 h ,(=) c(_) ,1-_ (3-40)
Where CN_° is defined in equation 3-4. Knowing that,
y - _ - ,- (3-41)
equation 3-18 gives
c(_') - c r 1 ---I - (: _ rt )• S
or
c(4) : ' . s (3-42)s 1----_ -_ -_ r
15

Combining equations 3-36, 3-39, 3-40, and 3-42;
Simplifying;
d- 1 = - CNa0 _ pcr (1 - 4)(L • ÷ rt _ _) _2 d_
VS(3-43)
where L ° is defined by equation 3-17. Applying equation 3-32 provides the local roll moment
coefficient.
CNa° Pc r (1 -k)
dC,_ -: - A L VS (L" ÷ r t - f') 52 d_(3-44)
Integrating over the exposed fin,
where;
Performing the integration;
C£ : k /'[ S÷rtJ:
;t
[(L • ÷ rt ) _ f] z2 d_
pc r (1 - 4) CNa 0
k = -
ArL_ VS
(3-45)
(3-46)
ks 2
CL : 12(1->0 [(1 + 34) s 2 + 4(1 + 24) sr t + 6(1 _ k) r_] (3-47)
Reintroducing k and simplifying;
pc r S CNa 0
C_ : 12 _ A¢ L r V[(1 + 34) s 2 + 4(1 + 2k) sr t +6(I +_ r2] (3-48)
The roll damping moment coefficient derivative is defined as;
\2V/IPLr oI-re °
16
(3-49)

Then,from 3-48,
crSCsa°[(1 +3k)s2 +4(1 +2>0 sr t +6(1 ÷k) r_]
6L2r Ar
(3-50)
However, CN_° must be corrected for three dimensional effects using the Diederich correlation
parameter. From the results of section 3.11, equations 3-1, 3-5, and 3-6, the subsonic roll damping
moment coefficient derivative for N fins is,
Nc Sr
C; ×---
p 6L 2r
l
(3-51)
In order to determine the roll damping moment coefficient derivative in supersonic flow, the
angle-of-attack distribution of equation 3-37 is introduced into the equations of reference 1 in
appendix A. The resulting rolling moment is divided by PL 2v to form the roll damping derivative.
To insure that C_ is truely a linear derivative, the value of %.x must be near zero. To provide_p
this condition we assume
PL(3 52)--:k
2V
where k is any defined constant; and,
k<<l
From equations 3-37 and 3-41:
max t Rll -I -
Using equation 3-52,
-_ tan -I
For the slender, finned vehicles under consideration;
2(s _ r)--:,4
L
Thus
- tan -_ (4k)mRx
(3-53)
(3-54)
17

To satisfy thecriterion,
equation3-54dictatesthat,
:: tan
k <_10-a
Using the equality, the angle- of-attack variation becomes;
.002 (y . r t)_(y) - (3-55
L
This variation is introduced into the equations of reference 1 and a value of the damping C is de-
termined. The corresponding C_ _ is found by,
For N fins;
C; C_
C/ = IO00NC_p
(3-56
3.20 BODY NORMAL FORCE COEFFICIENT DERIVATIVE
3.21 BODY NORMAL FORCE DERIVATIVE
The axisymmetric body of a slender vehicle is generally a combination of a nose shape, circular
cylinders and conical frustrums. The nose shape is usually conical or tangent ogival. See figure
3-7. It is required that there be no discontinuities at the interfaces of these components. This
allows integration over the entire length of the body. The effect of compressibility in subsonic flow
will not be considered in this analysis. From a static stability point of viewi ,this is a conservative
assumption since the normal force coefficient derivative increases near roach one.
For a slender axially symmetric body in subsonic flow, references 15 and 4 derive the steady
state running normal load as,
:' [A(x) w(x)]n(x) = _,Y__x
(3-57)
Where A(×) is the local crossectional area of the body. The rigid body downwash is a function of the
angle-of-attack is constant in ×,
18

(a) NOSE
CONE
OGIVE
(b) CYLINDRICAL SECTIONS
(
(c) CONICAL FRUSTRUMS
SHOULDER
Figure 3-7-Body Component Shapes
BOATTAIL
19

For angles-of-attack near zero
Then equation 3-57 becomes,
w:Va
n(x) = _V2 a dA(x) (3-59)dx
From the definition of normal force coefficient derivative,
Cn(x ) _ n(x) _ n(x)qA 1
_V_A
Applying equation 3-60 to 3-59,
(3-60)
Integrating over the length of the body,
2_ dA(x)Cn(x) : A dx (3-61)
Thus,
._ °dA dx 2 _ fo%=a_ d-_ __-- '°da
By definition of normal force derivative,
(3-62)
2_2
Cn : _- [A(Io) - A(O)]- (3-63)
equation 3-63 provides,
c_ : (3-64)
2
cN : _ [AO0) - AC0)](3-65)
Immediately equation 3-65 indicates that C_ is independent of the body shape as long as the independ-ent of the body shape as long as the integration of equation 3-62 is valid over the body. The
2O

bodycomponentsbeinganalysedare slenderand haveno discontinuities in their crossectionalareaor its derivatives. Thus,equation3-65 maybeappliedto them. Sincethe nosetip is assumedto bea sharppoint,
A(0). 0
Thus,thebodynormal forcecoefficientderivativein subsonicflow is;
Cu _) = 2 ABN:B _ (3-66)
Reference 27 presents a very useful method for determining the normal force coefficient
derivative of pointed bodies of revolution in supersonic flow. The second order shock expansion
theory approximates the body by a set of tangent conical frustrums. See figure 3o8. The frustrums
are each analyzed using an exponential series expansion for the pressure distribution
2 3s
(S0s +Sl ___ +S 2 s_+...)
P = - Po + C e s (3-67)
where Po, C, and S° are constants for a particular frustrum. By applying the boundary conditions
at the leading edge of the frustrum and at infinity while retaining only the first series term the
pressure distribution becomes;
where;
P = Pe - ('Pc -P2 ) e-_ (3-68)
_ = <p -_os _
-- surface coordinate
Pc = pressure on a cone having the same slope as the frustrum
= angle between surface and longitudinal axis
( )2 = indicates the value is taken at the front edge of the current frustrum.
21

TANGENT
BODY
Figure 3-8-Approximate Tangent Body
22

The notation of reference 8 is used and defined to simplify correlation between this presentation
and that reference. The value of (_P';:,s) 2 is determined by an approximate solution of the general-
ized characteristic equation in axially symmetric flow,
_P - k _ 1 _P -,k (_ sin_,sin_) (3-69)_s T_s cos _ _C 1 cos/a r
where
2)'p
sin 2_
c, = First Characteristic Coordinate
= Mach Angle
r = local radius
, - ratio of specific heats
The solution is;
3P B2 _')l - sin (3-70)
where;
B -
M
"Tp.M 2
2(M 2 - 1")
, ('21--)M_ 2{_-__21 J
)
( )] indicates the value is taken at the trailing edge of the preceeding frustrum.
( )3 indicates the value is taken at the trailing edge of the current frustrum.
The value of (_P/.s)_ is just (:_P ':_s) 3 of the previous frustrum.
- P3 _P
By applying equations 3-68, 3-70, and 3-71 to each element in succession, the pressure distribution
over the tangent body is determined. The local nondimensional normal load is given by;
23

A = n(x) 2 if" d(P/P_)- -- cos ¢d¢ (3-72)CL_ d TM_ JO da
where
4_ = Circumferential Angle.
d = Local diameter.
The derivative of the pressure distribution is evaluated by differentiating equation 3-68 with respect
to angle of attack; and then applying physical restraints to simplify the result.
d(P/P_) d(Pc/P _) X2 d(P 1 /P_)-- : (1 - e -v) + e -v
da da X1 da
Using 3-73 in 3-72 and simplifying,
(3-73)
X1(3-74)
Where "tcx" indicates the value of an equivalent cone. The running load distribution is determined
by successive application of equation 3-74 to the tangent body elements. The value of :xl, for the
initial cone is just,
Where "v" and "tcv" are the values at the initial equivalent cone vertex. The normal force coefficient
derivative is determined by the longitudinal integration of the running load distribution.
(CNT)B =_BB A r dx(3-76)
where;
AB = Body Base Area.
1 = Body Length.
The initial cone and equivalent cone characteristics are obtained from references 24 and 25; and are
presented in tables 3-1 thru 3-3.
24

000o.,.dr/l
,.....-i
iI
..Q
00p..cxl
t_0012.-.--i
0...-i
00
O0
0___
_O
0[_--
¢Q0
L_
I__t_
_
_1__0
"_O
__
_""_
__0
'_•--_
¢Q_
O_
_--_¢_
__'-
O_
__
_1_L
__
[_"
¢Q
o,g
_Z_
_"xl_
_-_
O_
_.1___-
_p-
__
_1_C
_1'_
_
__
__
_._
__
_-_o
__
__
o
_-o
__
,-__
_o_
_,_
_:o
_-,-_
LO
••
25

0
_'__
_'_
_'_
_1_
__
__
_L,_
D--
"C'4
Lt'_
_DO
0L""
O_
0_'-
_1"_'_
C
,,__o
_,_
_,_
co_
_0_
o_.
__
0c_•
_
©c_
00
0o
__
o_
,__0
_;o
o_
_,_
,__
o_._
__
_.o
_-_-
o.-,
_-_
__;
_.o
_$
__°
__
_o_
.-,o
0
,o
o•
o26

00co¢xl
00t_0o
_•
._o0
_o._
,__
_o_
__
_.,_
o._
0
©
0u-_
_¢o
co0
0_l
0co
co
o__
__
__
o_
_
•-_
0CO
t_"
__
u')
tt_
__
_
•_o
_o0
o_-
_o
__
_-_-
__-
_
0IcO
A
-_.
.__.
__
_-_
_o_
__
__
,--40
00
00
00
00
00
C_l
cO
0
_¢_1
_1_
_O
__1
Ob
_
NN
_o
oo
oo
oo
oo
oo
oo
L_
27

3.22 BODY CENTER OF PRESSURE LOCATION
As in the subsonic body normal force coefficient derivative analysis, it is required that there
be no discontinuities between the body component shapes in order to allow integration over the en-
tire body.
By definition, the pitching moment of the local aerodynamic force about the front of the body
(x = 0) is;
5('x_ : xn(x) (3-77)
The pitch moment coefficient is defined as;
thus,
Cm : --5 (3-78)A L
Since,
c _ xn(x) (3-79)_ Ar L
equation (3-79) becomes
n (3-80)% -_A
x %(x)
Cm(x) - L (3-81)
The value of the subsonic local normal force coefficient is given in equation 3-61.
equation 3-81.
2ax dA(x)
C (x) = Ar L_ dx
Integrating over the length of the body,
Using it in
(3-82)
C _ mm 10X 1
28 (dA(x_
A L \--_xdx (3-83)
28

This canbe integratedby parts;
(dA(x)_u : x dv : \-_--x /
du = dx-----------v = A(x)
dx
giving;
A L oA(Io)- A(x) dx(3-84)
But, by definition, the integral term is the body volume, therefore;
C = 23 rtoA(10) _ VB]m Ar Lr L
By definition, the pitch moment coefficient derivative is;
O_ [a:O
(3-85)
(3-86)
Then; from equation 3-85,
(Cm:)s:A-_L [10A(I0)-VBI(3-87)
The center of pressure is determined by,
Using equations 3-65 and 3-87 in 3-88 and simplifying yields,
(3-88)
V B
Re : I o - __%
(3-89)
29

The volume formulae for cones, conical frustrums and circular cylinders are well known and
do not merit repetition in this paper. However, the volume formula for a tangent ogive is not
readily available and is given herein for the readers convenience. The volume of a tangent ogive
nose shape is determined in reference 12 as,
(')dN A(L) - - 1 (3-90)
where;
L N
fN :--
In supersonic flow, the method of reference 27 determines the pitch moment coefficient derivative as,
C =---2-_ A rx dx
m A B d(3-91)
Where \(x) is found using equation 3-74. The center of pressure location of the body in supersonic
flow is then determined by the use of equations 3-76 and 3-91 in equation 3-88,
\%/ (3-92)
3.30 TAIL-BODY INTERFERENCE EFFECTS
The effect of interference flow between the tail and the body on the normal force aeTodynamics
of a slender, finned vehicle can be expressed in terms of interference factors (reference 23).
(C_,,)T< B} : (%')r Kr(s) (3-93)
(C_)T(B): (C,_,) T kT(B) (3-95)
The interference factors are determined by applying slender body theory to the flow over the total
vehicle.
3O

3.31 TAIL IN THE PRESENCE OF THE BODY
Because the fins under consideration are of low aspect ratio,the value of KT(B}from references 7 and 17.
is available
(3-96)
Reference 23 determines that the longitudinal tailcenter-of-pressure is independent of the inter-
ference flow.
Xr_B> : XT (3-97)
3.32 BODY IN THE PRESENCE OF THE TAIL
The only portion of the body affected by interference flow is the portion between and behind the
fins. Subsonically, slender body theory, reference 3, determines;
(3-98)
where KT(_) is given by equation 3-96. In supersonic flow, the interference effect on the body can
be strongly affected by the fin tip mach cone. The fin tip mach cone intersects the body when,
(1)fl _ (1 + _,) _ + 1 > 4 (3-99)
Until this condition is reached equation 3-98 is still valid in supersonic flow. Once the fin tip
mach cone impinges on the body, the function becomes quite complex and is more easily presented
in the form of curves. Figure 3-9 shows the variation of the corrected interference factor. Using
the result of this curve, K_(r_ ;
31

Cu)r_(r) : K'B(T):(1 • ') (,_ - 1) (3-100)
By the extension of the fin lifting line into the body, reference 23 derives the subsonic variation
of the center-of-pressure location of the tail interference flow over the body.
f - r 2 cosh 1 s - s , _ r /
--1
_ c • - r,l tanF I/4 (3-101)
XB(T) = IT + "4- rt s s "7
rs2)f_'--_"-_ , r t 2
Where, s > r and ;i_ _>4. In addition, slender body theory is applied subsonically to find XB(T) at
_i_= 0. Slender body v_(r) values are obtained at intermediate .;_values only for _ = 1. For other
values of _. and sweep the Y--BeT) curves are interpolated between the lifting line values and the
slender body value at 3_= 0. The shape of the interpolated curves is assumed similar to the _ = 1
curve. Figure 3-10 shows the full subsonic '_(r) variation. In supersonic flow, the center-of-
pressure of the interference flow over the body is found by applying equation 3-92;
(Cm:JB(T )-- z
_(B(T) -_B(T )
--d+l v(3-102)
Reference 23 gives the body interference pitch moment derivative as derived from slender body
theory;
x- 8 (m_)3/2 dy x cos -I
y
This is for fins with supersonic leading edges, m_ > 1. For subsonic leading edges, 02 < 1 and,
foX?(C % = _ 4,2m dy dx (3-104)ma (T) A r _,'-_ ._32m 2 - 1 v m)r_ - y
32

I
q_
#_rn T
6 QO
.,L5 ,X
2 (/94)(_+X) (_+i) >44 RADIAN ON ORDINATE SCALE
0.8X
,_. 0.6
( /©
0,4 0,8 1.2 1.6 2.0 2.4 2,8 3.2
2 Brr
(CrlT
Figure3-O-SupersonicKB(T)
3.6 4.0
33

(33
IX
,.Err23u3u)uJr'r"(3_I.J_0
LIJI--ZI.iJ£b
0.3
0.2
O.l
0
0.3
0.2
O.I
0
0.3
i
..... EXTR APOLATION
_6"f
f/
/ I'
_°
T =O
04\ o.2,,,,,
0.6 i
.I
- ---..--. --. -wF
0.4\x.
O.2\"r=O
0.6 '2
0.2
0.1
J
Q) NOLEAOING-EDGE SWEEP, X=O.
_k_T=0,0.2,04, 0.6 --
2 3 4 5 6 7 8EFFECTIVE ASPECT RATIO, _.,4R
(b) NO LEADING-EDGE SWEEP, X =_--.(c)NO LEADING-EDGE SWEEP, X=I
Figure 3-10-Subsonic XB(T)
34

0.4
0.3
0.2
0.1
0(d)
0.2 r- 0.6
h
A k\0.4
0
0.4
(e)0
,"f 16...,
,f
r =0.6
'_'----- \ \ 0.4
_, \02\0
0.3
0.2
0.1
\r =0,0.2,0.4,0.6
0 2 3 4 5 6 7 8EFFECTIVE ASPECT RATIO, /_AR
I(d)NO MIDCHORD SWEEP, X=O. (e)NO MIDCHORDSWEEP, k = -_-- (f)NO MIDCHORD SWEEP, k=l.
Figure 3-10 (Continued)-Subsonic XB(T)
35

0.6
0.5
0.4
0.3
0.2(g)
.ram.
r =0.6
_"0.4
\0.2
0
0.4
m
J,.o0.3
IX
J
_0.2
W
U_
o 0.1n-
WI---
Z
W
o 0h_
r
"S_y'--r =o6//I /
0.2
/0
/0.4
0.5
0.2
0.1
0
/r :0, 0.2,0.4,0.6
2 3 4 5 6 7 8EFFECTIVE ASPECT RATIO,/_.,_
I(glNOTRAILING-EDGE SWEEP, k=O. (h) NO TRAILING-EDGE SWEEP, X=--_. (ilNOTRAILINGEDGE SWEEP, k=l.
Figure 3-10 (Continued)-Subsonic XB(T)
36

Wherethe coordinate system has been given in figure 3-2. _(T_ is determined by using equation
3-100 along with either 3-103 or 3-104 in equation 3-102. The result is shown in figure 3-11.
3.33 CANTED TAIL IN THE PRESENCE OF THE BODY
The effect of fin cant at zero angle-of-attack is determined in a manner similar to the effect
at an angle-of-attack alone. Reference 23 determines the corresponding interference factor,
[-
1 J_2 (T _ 1) 2 ,,,_-2 . 1,)2 _2 _ 1 2:'(_ 1)
kT(B) _72 ?2 -r2 (T - 1) 2 T(_ - 1)
2
, (72 + 1)2 (sin-, T2 - I I 4(T + 1) sin-, ('r2 - 1_
8 in (T2+ I_ (3-105)* CT - I_---5 _--5_/J
No center of pressure value need be considered for the canted fin in the presence of the body
since only the roll moment derivative is considered.
3.40 TOTAL NORMAL FORCE AERODYNAMICS
The total normal force coefficient derivative is the sum of all the components.
CN_ CN_: + = (B) ; B(T)
The overall center of pressure is the solution of the moment sum of the components.
XB (CN=_ +XT(B)(CN_(B ) +XB(r)(CN_(T)
(3-106)
(3-107)
The value of total V is zero. The total cz value is determined from equation 3-95.
3.41 PITCH DAMPING MOMENT COEFFICIENT DERIVATIVE
When the vehicle has an angular pitch velocity, the superposition of the local pitch velocity at
the fins on the free stream velocity produces a local angle of attack which is constant across the
fins. See figure 3-12. The moment produced by the induced force is;
37

0.7
rn
LJ
_c
GoGo,,, 05CC
EL
I,0
rri,i
0.4Z
0.3
I
m# =0.2
(b)
0 4
|
).8 1.2 1.6 2.0 2.4
EFFECTIVE BODY-DIAMETER,ROOT-CHORDRATIO C--;-
2.8
Figure 3-11 -Supersoni c XB (T)
38

Lx CG
•
XT(B)
OVERALL PARAMETERS
F
1V
LOCALANGLE -OF-ATTACK
Figure 3-12-:Pitch Damping Parameters
39

in FC.x] (3-108)
where;
But,
and,
For V >>v,
L_× = XTCB) - XCG
' '(v)a = l:an-
v
v
(3-109)
(3-110)
the local pitch velocity is,
v : q(Ax_ (3-111)
Combining equation 3-108, 3-109, 3-110, and 3-111 and simplifying;
T(B)
(3-112)
Knowing the definition of pitch moment coefficient, equation 3-78,
c°:1%.,'_-/(v) (3-113)
The pitch damping moment coefficient derivative is defined as,
k2V/lqcr:02V
Thus, using equation 3-113 in 3-114.
(3-114)
4O

(3-115)
Equation3-123is equallyapplicableto threeandfour fin configurationssincethetail normal forcederivativeis correctedfor dihedraleffects.
3.42 ROLL DAMPINGIN THE PRESENCEOF THE BODY
Anytail bodyinterferencefactor maybeexpressedastheratio,
s÷r
fv %(_) c(f') d_, K : (3-116)
s+r
_ %(_) c(f_ df
(See figure 6) where;
:_,(O -- the angle-of-attack variation over the fin in the presence of the body
• 0(f) = the angle-of-attack variation over the fin alone.
Reference 23 gives the value of %(0 for a tail-body combination at an angle of attack, _, as;
r_ (3-117)a i (O : a + f2 %
where % is the angle of attack at the body surface. For the case of the tail-body combination at an
angle of attack,
% = _ : %(0
However, for a roiling vehicle at a zero angle of attack, equation 3-39 gives;
and
Then, equations 3-39, 3-117, and 3-118 give,
Pf%(0 : -_-
Pr%- V
=i (O = - V +
(3-118)
(3-119)
41

Therefore,theroll dampinginterferencefactor, kR_B), becomes
kR(B) :
; -_ f + c(,f)d{
_+r
jr PSimplifying;
kR(B) : 1 +
+rs
f_ c (5)d#q-
s÷r
(3-120)
(3-121)
Integrating equation 3-121 using the chord variation given by equation 3-42 yields,
kR(B) = 1 +
v - L 1 - L111
T - 1
(z + 1) (_ -X) (1 -s) (r a - 1)2 3(_ - i)
(3-122)
The roll damping moment coefficient derivative can then be expressed as,
Where kR(B) is given by equation 3-122.
(C_p)T(B) = (C,c,p) kR(B) (3-123)
4.00 AXIAL FORCE AERODYNAMICS
The only coefficient dependent on the aerodynamic forces acting parallel to the longitudinal
axis of the vehicle is the drag coefficient. Drag forces arise from two basic mechanisms, skin
friction and pressure distribution. Since both mechanisms, and their interactions, are extremely
42

complex,mostpractical theoreticaldrag computationsmustbe temperedwith statistical andempirical data. Themajority of theequationsderivedin this sectionare either theoretical gen-eralizationsof statistical-empirical dataor direct curve fits of experimentalresults.
4.10 SKINFRICTIONDRAG
The skin friction coefficient is defined as the skin friction drag of a plane surface divided by
the dynamic pressure and the wetted area of the surface.
_friction
Cf _A. (4-1)
4.11 INCOMPRESSIBLE FLOW SKIN FRICTION'COEFFICIENT
The skin friction coefficient for incompressible flow can be expressed in terms of the reynolds
number, see figure 4-1. For laminar flow, their relation has been established both experimentally
and by theoretical boundary layer considerations, reference 6.
1.328 (4-2)Cf : _/-'_
For reynolds numbers greater than about 5 × l0 s the boundary layer flow becomes transitional and
then turbulent. No good theoretical solutions have been found for turbulent flow. Figure 4-1 shows
the experimental data for turbulent skin friction. Schoenherr applied the theoretical boundary layer
work of von Karman to the experimental data and established the turbulent flow relationship;
tog (R of) : 024_____22 (4-3)
Hama formed a simpler formula which agrees with equation 4-3 within ±2%.
Cf : 1 (4-4)(3.46 log R - 5.6) 2
The form of the transitional curve may be approximated by subtracting an increment from equation
4.4. The increment has the form
k (4-5)ACr =
Based on experimental data Prandtl indicated that k = 1700. This fact, as well as other possible
transitional curves are shown on figure 4-1. Combining equations 4-4 and 4-5,
43

II
I[
I
0
o
0
oo
.//
o
"G,:.,z
LI-
.EI"7,
,i
44

_o0
O_o
ood
o
uii
rr_,
o
ii
f
_oo
6od
45

Table 4-1
Approximate Surface Roughness Heights ofPhysical Surfaces
Type of Surface Approximatemicrons R s in mils
Surfaces like that of a "mirror" .
Surface of average glass
Finished and polished surfaces
Aircraft-type sheet-metal surfaces
Optimum paint-sprayed surfaces
Planed wooden boards
Paint in aircraft-mass production
Steel plating - bare
Smooth cement surface
Surface with asphalt-type coating
Dip- galvanized metal surface
Incorrectly sprayed aircraft paint
Natural surface of cast iron
Raw wooden boards
Average concrete surface
0
0.1
0.5
2
5
15
20
50
50
100
150
200
250
500
1000
0
0.004
0.02
0.1
0.2
0.6
1
2
2
4
6
8
10
20
40
46

Cf: 1 1700(3.46 log R - 5.6)2 -_ (4-6)
forR > 5 × 105 .
The above considerations are for surface roughness sizes that are submerged in the laminar
sublayer. For appreciable rough surfaces the turbulent skin friction coefficient is shown in figure
4-2. The "smooth" curve is followed until the critical reynolds number corresponding to the rough-
ness is reached.
IR \-i 039(R•)_ = Sl (__) (4-7)
\'_r/
For reynolds numbers higher than the critical value, the skin friction coefficient can be considered
independent of reynolds number, reference 6.
Cf = 0.032 (4-8)
The flow is considered to be turbulent throughout the reynolds number range since the roughness
trips transition even at low reynolds numbers. Table 4-1 is a list from reference 6 of the approxi-
mate average roughness heights for physical surfaces.
4.12 COMPRESSIBLE SUBSONIC VARIATION
In compressible subsonic flow reference 6 indicates that the laminar skin friction coefficient
remains unchanged while the "smooth" turbulent value varies as,
c, = c, (i - .o9 M2) (4-9)c
and the change for turbulent flow with roughness is,
Cfc = Cf (1 - .12 M2) (4-10)
4.13 SUPERSONIC VARIATION
Theoretical solutions in reference 16 indicate that the supersonic variation of the Laminar skin
friction coefficient is;
Cf (4-11)Cf =
¢ (1 + .045 m2) I/4
This has been confirmed by experimental data, reference 6. Experimental data, reference 6, for
the variation of "smooth" turbulent Cfc in supersonic flow indicates a strong dependence on the wall
47

heattransfer as well as machnumber,figure 4-3. Thewall temperaturealternativesshownarethetwopossibleextremes. Theactualconditionwouldprobablybeclosestto therecoverytempera-ture. Thecurvefit of figure 4-3 is,
Cf
Cf = (4-12)c (1 + k M_)-ss
where k = .15 for no heat transfer and k = .0512 for cooled wall.
According to reference 10, the turbulent skin friction with roughness drops off according to the
relation,
Cf (4-13)Cf =
c I + .18 Ms ..
However, this equation must be used with care. It is apparent the value of c% calculated for the
flow with roughness should never be less than the corresponding smooth value.
4.14 DRAG COEFFICIENT
Once the skin friction coefficient is determined, the skin friction drag coefficient, as based on
reference area, is found by,
C% = cfc (_) (4-14)
For the fins, the wetted area of each fin is twice it's planform area.
drag coefficient is,
CD :2NCf (AT_ (4-15)ft c \%1
The body skin friction coefficient must be corrected for the fact that the body is not a flat plate,
reference 6.
A
CDfn = + Cfc Ar (4-16)
Thus, the tail skin friction
4.20 PRESSURE DRAG
4.21 TAIL PRESSURE DRAG
The pressure drag on a fin in subsonic flow arises from three basic contributions:
radius leading edge; thick trailingedge; and the overall fin thickness.
a finite
48

{,3
I,I
1.0
0.8
0.6
0.4
0.2
0
.i
,_-II
Twall=Tomb
=Trec. )-
I0 II
Figure 4-3-Supersonic Cf¢ Variation
49

A finite radius leading edge can be considered a circular cylinder in cross flow that effectively
has no base drag. Figure 4-4 from reference 6 shows the variation of the total drag coefficient of
an infinite circular cylinder perpendicular to the flow and the variation of its base drag. The dif-
ference between these two curves is the drag coefficient of the leading edge. This difference is
plotted in figure 4-5.
Subsonically up to M = .9 this curve is fitted by,
AC D -- (1 - M2) --417 - 1 (M < .9) (4-17)
Between .9 < M < 1, the curve is essentially linear.
ACD : 1 - 1.5 (M - .9) (.9 < M _<1) (4-18)
Supersonically, the curve may be approximated by a high order polynomial, reference 6.
ACD 1.214 .502 .1095 .0231: ---+-- +-- (M> 1) (4-19)M 2 M4 M6
From cross flow theory) reference 6) the drag coefficient of a cylinder inclined to the flow is,
CD_" = COS 3 F
c1
The frontal area of a typical leading edge is;
ALE = 2 LLE r L
the length can be expressed in terms of the span,
thus;
S
LLE cos F L
ALE 2 S r L
A r A r cos F L
(4-20)
(4-21)
50
From equations 4-20 and 4-21, the total leading edge drag of N fins becomes,
CDLv = 2N (_--_-rrL)cos 2 FL (ACD)(4-22)
where ACo is obtained using equations 4-17 thru 4-19.
The trailing edge drag is two dimensional base drag and can be expressed in terms of the cor-
rected skin friction coefficient, reference 5, for incompressible flow.
0.135 (4-23)
CDBT = _fB

o
I I 1 l 1 [ ] 1 1i
2.5 ' " -
2.O -- - ÷
i'_ _.' /TOTAL".._t_,a + "_.% /DRAG (38. K) -
--,_;_ ; " ",..,_;_ _ ,i._..-- _-...-; --.=..--_=j -.=,e-..t_, _e_A "_r %
I.O
0.5
0
0.1
i % /I.43/M z
- BASED._G"'_,\/
I _ I [ J I -r_-_-7=-_-O. 2 0.3 0.4 0.6 0.8 I 2 :3 4 6
MACH NUMBER
I
8 I0
CYLINDERS BETWEEN WALLS
ARC, TUNNEL TESTS
o AVA, WIRES i TUNNEL
• NACA TUNNEL---
+ NACA,FLIGHT TEST
,, BRITISH, STANTON
A DVL_SUBSONIC-----
• JUNKERS_TUNNEL
• NACA SUBSONIC---
BASE DRAG
/_ SUBSONIC CYLINDER
. SUBSONIC CYLINDER
- TRANSONIC CYLINDER
_- SUBSONIC SUPERSONIC
SPHERE (CORRECTED)
,k NAVORD, SPHERE
Figure 4-4-Cylinder Drag Variation
51

JQcJ
JLt_
IOQ
_co
mf_
--cJ
OO
JLr_
c_
ta_
W_Jf_
L_
LL
52

where;
C%=2Ce(c) (4-24)
For subsonic compressible flow, this may be corrected using the prandtl factor for swept wings,
reference 6,
1Pf = (4-25)
1 -M 2 cos 2 Fc
However, in order to maintain a finite value at
the prandtl factor is corrected to,
M2 cos 2 Fc : 1
1P; - (4-26)
K - M2 cos 2 F;
where K is a constant to be determined from the value of CDBT at M = 1. Also, for compressible flow,equation 4-24 becomes,
CfB:2Cf ( C ) (4-27)
After correcting to the reference area, the subsonic trailing edge drag coefficient for N fins is,
.135 N ('a'Bft
\At/
,/,<_ M2 ro(4-28)
Reference 11 gives a curve for the two dimensional base pressure coefficient at supersonic speeds
figure 4-6. This is essentially the base drag coefficient refered to the base area. An analytic ex-
pression which remains well within the cross hatching is,
1 - .52M -t't9
M2
But, this must be corrected for possible boattailing of the fin, reference 6.
1 - .52 M -_ .19 (4-29)
+ 18 Cf M 2
53

-0.80
-0.72
-0.64
-0.56
ZLul
-o.481.1_i1I.,iJ00
-040UJOd
u_cO
"' --0.32(]C
(3_
L_O9
m --0.24
--0.16
-0.08
0
, |
NOT E :REFERENCE NUMBERSARE THOSE OF REFERENCE II
2 5
FREE-STREAM MACH NUMBER, Moo
Figure 4-6-Two Dimensional Base Pressure
4
54

For N fins, the supersonic trailing edge drag coefficient, as corrected to the reference area is then,
In order to determine the constant I<, equations 4-28 and 4-30 are set equal at _1 = 1.
'135N QA_) N(1 - 52)(Au_/\A/
- _c , 18C ti
where the superscript * indicates sonic values. Solving for K,
[t< cos 2 223 . 4.02 C_ \l_7]j (4-31)
]+Cr C_
This is used in equation 4-28 to evaluate the subsonic compressible trailing edge drag.
This method of maintaining finite values of the prandtl factor at mach one is used throughout
the remaining derivations.
From reference 6, the drag due to thickness of two dimensional airfoil in compressible sub-
sonic flow can be expressed as,
For a three dimensional fin, based on the reference area this becomes,
(4-32)
CDTT +-:c+ (/, _M_co,_i(4-33)
55

Correctingit for a fin sweepandintroducingthe correctionconstantin theprandtl factor,
(4-34)
The value of the thickness drag of finitefins at mach one has been determined and presented in
reference 6. A curve fitof the result is, "
CDTT. = 1.1S \cr] 1.61 + _f - ¢('_ - 1.43) 2 + .578 -. (4-35)
where
Solving 4-34 for K,
CDTT A t t
K=_os_r c + - ___t5 (4-36)
Equation 4-35 is used in 4-36 to determine K. The result is used in the following equation to de-
termine the subsonic tailthickness drag. For N fins,equation 4-34 is;
30 cos 2 7¢
4N t cos r" + (4-37)
CDTT = Cf c (_-K _M2 cos2
At supersonic speeds the effect of a finite radius leading edge is found by using equation 4-19 in
equation 4-22. The trailing edge drag is calculated using equation 4-30. The thickness or wave
drag, C%r, is computed by the method of reference 1 in appendix A.
The overall drag on the tail is the sum of the different contributions. In subsonic flow
(4-38)(CDT)T=CDfT+CDLT+CDBT+CDTT
56

At supersonic speeds,
CDT)T = CDf T ÷ CDLT ÷ CDBT + CDwT (4-39)
Equation 4-38 uses the results from equations 4-15, 4-22, 4-28, and 4-37 respectively. Equation
4-39 uses equations 4-15, 4-22, 4-30, and results of appendix A respectively.
4.22 BODY PRESSURE DRAG
The body pressure drag may be broken down into two contributions, for body and base. Accord-
ing to reference 6, the forbody drag in subsonic compressible flow may be written,
C D
p
6 AWB C%: (4-40)
Again applying the correction constant to the prandtl factor,
C D
p
6 AWB C c= (4-41)
f3 A (K- M2) "6
From experimental data, reference 19, the forbody drag values of both ogives and cones are known,
figure 4-7. In the range of values that are of interest, 1 <_ fB _ 10, these curves may be fitted by
the following equations.
i:.pl 8s (4-42)D cone (fN + "T) 1"29
(C'p)D : .88 (4-43)ogive (fN + 1")2'22
Solving equation 4-41 for K;
K=I _-6 AwB C_] s/3 (4-44)
57

0d_
[I
II
II
I
0d
dd
6d
o
I'o00
Z
0o_EaD_i
I.L
z
58

Then
6.82 AwB C_ (fN + "731"29] s/3K =1+ - ! (4-45)
6.82 Awe C_ (fN + 1)2"22ts/3__ . (4-46)
The subsonic compressible forbody pressure drag is found by using equations 4-45 or 4-46 in equa-
Aws^ fs^tion 4-41. For the nose AwN̂ and fN^ should be used. For a conical shoulder and are
proper.
The supersonic value is determined by the second-order shock-expansion method, reference
27, as explained in section 3.21 of this thesis. The axial component of the pressure distribution
is integrated around each element and then over the length of the body.
4 P sin ,, d: d× (4-47)CDp : )_]2
where
P comes from equation 3-69
_, = the local angle between the surface and the longitudinal axis
_ = Circumferential Angle.
The Base drag of a body of revolution in incompressible flow is presented in reference 5 as,
(4-48)
where,
CfCfB =
Correcting this to the reference area and for subsonic compressibility.
CDB :(4-49)
59

Introducing the correction constant into the prandtl factor term.
0.29
(K - M23
From reference 11, for no fins near the body base, or for fins of zero thickness, the body base
pressure coefficient at mach one is
At machone with h /c r = 0.1,
See figure 4-8.
P_ : 0.185
P_ _ 0.30
The results of reference 11 indicate that PB is roughly a linear function of fin trailing edge
thickness at a constant mach number. Therefore,
Solving equation 4-50 for K,
c;B=E 185+115
K=I +
(4-50)
(4-51)
(4-52)
Using equation 4-51 in 4-52 and simplifying
1K : 1 + (4-53)
The subsonic compressible body base drag is computed by using equation 4-53 in 4-50.
References 11 and 6 both present curves of the base drag in supersonic flow. Figure 4-8 is
from reference 11. The free flight test curve is most representative of the variation. It is an ex-
ponential over an initial range and an inverse square over the remainder of the mach numbers. To
find the exponential, the free flight curve in figure 4-8 may be fitted in terms of the value at mach
one.
60

013(3.
LL
L.)
Wrr
(..f)qJrrCL
LLI(.'3
(13
-036
- 032
--0.28
-0.24
-0.20
--0.16
-0.12
-0.08
0
ESTIMATE B,
\ _..-"W,THF,NS
ESTIMATE A / _'_¢
WITH FINS %_%_" D_
PRESENT ESTIMATE, NO FINS, Mo_'M,:,_
----- FREE-FLIGHT TESTS
OF FINNED MODEL
REF 12, R :10 TO 12OxlO 6
WIND-TUNNEL DATA,WITH FINS:
0 REF. 26
0 REE 26
0 LANGLEY 9"SST
FLAGGED SYMBOLS, NO FINS
- 0.04
0
1.0
INOTE: REFERENCE NUMBERS ARE THOSE OF REFERENCE II.
1 I I I I1.2 1.4 1.6 1,8 2.0 2,2 2.4 2.6
FREE-STREAM MACH NUMBER, M
Figure 4-8-Three Dimensional Base Pressure
2.8 3.0 3.2 3.4
61

CBB :: CDB I0.88 + .12e "J'58(M-11 ] (I _M_Mr,.) (4-54)
where M is the point where the two variations cross.
variation as,
Also, reference 5 gives the inverse square
(M > Mcr3 (4-55)CDB M2
Ifitis assumed the ratio of the value of CoB at .M=M_rto C" remains constant for all curves, (inspec-
tion of the curves in reference 6 indicates this is a good assumption) then the value of the critical
roach number can be found,
M 0.892 (4-56)z __
The value of C* is given by equation 4-51. In either subsonic or supersonic flow,DB
COt) + C (4-57)B = CDP DBB
For subsonic values, equation 4-41 and 4-50 are used. In supersonic flow equations 4-47 and 4-54
or 55 are used.
4.23 TOTAL DRAG
The drag of the totalvehicle is the sum of the tailand body contributions.
:(%1,+
No interference drag effects are considered.
(4-58)
5.00 COMPARISON WITH EXPERIMENTAL DATA
In an attempt to obtain as broad a range as possible without being voluminous, each characteris-
tic is compaired to the data from a different configuration. In some cases, the choice of configuration
was dictated by the availabilityof the appropriate data.
5.10 NORMAL FORCE COEFFICIENT DERIVATIVE AND CENTER OF PRESSURE
The windtunnel data of the Aerobee 350 sounding rocket, figure 5-1, are given in reference 14.
Figures 5-2 and 5-3 show the results of the present method as well as data points from
62

I
"Tu'3+_
u-
63

C Na[
33_
52-
30
26
22--
20--
14-
12 --
IO--
f
33.4
X
A = 381 in 2r
×
X
I I I I2 3 4 5
Mm
Figure 5-2-Aerobee 350 Normal Force Derivative
THEORETICAL
WIND TUNNEL
x
X
i i I6 7 8
64

410 --
Xcp
4OO
390
38O
370
360
350
340
330 --
320 --I"
0
x
A r = 381 in 2
L r = 22 in.
THEORETICAL
x WIND TUNNEL
I I I I2 3 4 5
Moo
Figure 5-3-Aerobee 350 Center of Pressure
I i I6 7 8
65

reference 14. The maximum derivation of the theoretical CN, values is 7.83_ and the maximum
deviation of the theoretical center of pressure values is 1.18%. The degree of accuracy of the
windtunnel tests is indicated as about 6%.
5.20 ROLL FORCING MOMENT COEFFICIENT DERIVATIVE
The only roll forcing moment coefficient derivative data over a broad range of mach numbers that are
available to the author are those of the single stage tomahawk sounding rocket, figure 5- 4. The data for this
vehicle are unpublished at this time, but have been provided by the test coordinator, reference 28.
Figure 5-5 shows the comparison between the theoretical result and windtunnel data. No data are
available in the subsonic region. The average deviation of the theoretical C. is 7.54%. The
accuracy of the windtunnel data is about 5%. It is apparent, both from the windtunnel data and the
subsonic theory that the theoretical value at M = 1.5 is no good.
5°30 ROLL DAMPING .DERIVATIVE
Reference 21 presents a full set of data for the basic finner test rocket, figure 5-6. It is the
only config-uration for which roll damping moment coefficient derivative data are available to the
authors. Unfortunately, the range of the data is relatively small. Figure 5-7 shows the comparison
between the theoretical C: is 5.68%. Reference 21 does not indicate the degree of accuracy of its.p
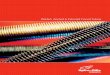
data. No subsonic data can be found for Ca •-p
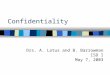
5.40 DRAG COEFFICIENT
Aerobee 150A, figure 5-8, drag coefficient data are available from reference 29. The theoretical
drag coefficient results are compared to the windtunnel data in fig-ure 5-9. In order to duplicate
the test conditions, the test reynolds numbers were used to set up a Re vs. M curve, figure 5-10.
This curve was used in generating the theoretical data. The surface of the windtunnel model is
highly finished. From table 4-1, the appropriate surface roughness is about .01 mils. The equiva-
lent full scale surface roughness is .1 mils. The maximum deviation of the theoretical drag co-
efficient is 8.52%. Again no subsonic data are available.
5.50 PITCH DAMPING DERIVATIVE
There are no C experimental data available. The data taken in windtunnel experiments are amq
combination of the pitch damping derivative and a time log derivative due to the rate of change of
angle-of-attack. There is no way to separate the two effects. Therefore, no comparison of the
pitch damping derivative can be attempted.
66

_gooZLdt'--XhiC
:3£0
m-
wF-
xt.l,J
E3
Fi,
I_
i
--(
o_
_10'_
a0
dd
--.d
%
<_lU
-I
I--0z
o3c)n"LL
J.J
I
£0
oI-'-I
7,&
6'7

50 m
cz 8
45
40
55
25-
20-
15-
I0-
5 I0 I
30
A r -- 64 7 in 2
Lr= 9 in.
THEORETICAL
x WIND TUNNEL
x
x x
x
I I I I I I I2 .5 4 5 6 7 8
M
Figure S-S-Tomahawk Roll Forcing Derivative
68

oJt
r
°1llo
iI
c_0
I
(._Zw-_c/)
c_zL
L_"
Ow
o_c_Q
OW
!
uZ.uI_o
69

-45 --
czp
-40
-55
-30
-25
-20
-15
THEORETICAL
X WIND TUNNEL
-I0 I I0 0.5 1.0
A r = 786 in 2
L r = I0 in.
X
i I i I1.5
M
2.0 2.5 5.0
Figure 5-7-Basic Finner Roll Damping Derivative
7O

0
z0(D
w
i
(;9
0n-OC]
D0r_32or)
WOr)0
!o
_-
+
0w
--
0T
mt,-c_(M
±
tt<¢_I-w
tozu_wt--o90
0
-tr0if-,
_._jI
if)ZU
_
rri11Zo')
9iitl
U-
71

C D
0.6
0.5
0.4
0
A r = 225 in 2
I I I I2 :5 4 5
M
Figure S-9-Aerobee 150A Drag Coefficient
THEORETICAL
WIND TUNNEL
X
I I I6 7 8
72

i
0
X
n.-
9
8
7
4
00
x
X-VALUE USED IN
WIND TUNNEL TESTS
• (REFERENCE 29)
x
x
x
\
THE SHAPE OF THE CURVE
IS FAIRED BY COMPARISON
WITH NOMINAL FLIGHT
REYNOLDS NUMBERVARIATION.
X
I I I I
3 4 5 6
M
X
7 8
Figure 5-10-Aerobee 150A Reynolds Number
73

6.00 CONCLUSIONS
On the basis of the comparisons in section 5, the method presented in this dissertation pre-
sented in this dissertation predicts the values of CN_ , x, C_, ¢t , and c__ to well within ten (10)P
percent of experimental results between mach 2 and 8. Although no comparison can be made for
Cmq , the results of section 5-1, coupled with the dependence of Cmq on (_)T<B_ and X_<B), tend to
indicate that the theoretical C is also accurate to about 10%.mq
The lack of subsonic experimental data prevents any concrete conclusions to be drawn about the
accuracy of the present method at subsonic spbeds. However, the figures in section 5 show that the
subsonic variations of all the compared characteristics are quite reasonably valued with respect to
the supersonic values.
In general, then, the method presented in this dissertation can be used to confidently predict
the aerodynamic characteristics oI slender finned vehicles.
74

7.00 REFERENCES
1. Barrowman, J. S., FIN a Computer Program for Calculating the Aerodynamic Characteristics
of Fins at Supersonic Speeds. NASA-GSFC X-721-66-162, 1966.
2. Diederich, F. W., A Plan Form Parameter for Correlating Certain Aerodynamic Characteris-
tics o[ Swept Wings. NACATN-2335, 1951.
3. Ferrari, C., Interference Between Wing and Body at Supersonic Speeds-Theory and Numerical
Application. J. A. S., p. 317, June 1948.
4. Goldstein, S., Lectures on Fluid Mechanics. Interscience Publishers. New York, 1960.
5. Horner, S. F., Base Drag and Thick Trailing Edges. J. A. S., p. 622, October, 1950.
6. Horner, S. F., Fluid-Dynamic Drag. Published by the Author. Midland Park, N. J., 1958.
7. Jones, R. T., Properties of Low-Aspect-Ratio Pointed Wings at Speeds Below and Above the
Speed of Sound. NACA Rep. 835, 1946.
8. Jones, R. T., Theory of Wing-Body Drag at Supersonic Speeds. NACAReport 1284, 1956.
9. Jones, R. T., and Cohen, D., High Speed Wing Theory, Princeton Univ. Press, Princeton, 1960.
10. Liepmann, H. W., Goddard, F. E., Note o,1 the Mach Number Effects Upon the Skin Friction of
Rough Surfaces. J.A.S., p. 784, October 1957.
11. Love, E. S., Base Pressure at Supersonic Speeds on Two-Dimensional Airfoils and on Bodies
of Revolution With and Without Fins Having Turbulent Boundary Layers. NACA TN-3819, 1957.
12. Mayo, E. E., Cone Cylinder and Ogive Cylinder Geometric and Mass Characteristics. Memo
to Code 721.2 Files, NASA-GSFC, 1965.
13. Mayo, E. E., Equations for Determining the Effects of Fin Dihedral on Vehicle Stability, Memo
to Code 721.2 Files, NASA-GSFC, 1967.
14. McNerney, J. D., Aerobee 350 Windtunnel Test Analysis, Space General Corporation, E1Monte,
California, 1963.
15. Miles, J. W., Unsteady Supersonic Flow. Section 12.4 A.R.D.C., Baltimore, 1955.
16. Moore, L. L., Yound, G. B. W., Jansen E., Compressible Boundary Layer-Laminar Solution,
J. A. S., p. 229, April, 1952.
17. Morikawa, G., Supersonic Wing-Body Lift. J. A. S., Vol. 18, No. 4, April, 1951, pp. 217-228.
18. Morikawa, G. K., The Wing-Body Problem for Linearized Supersonic Flow. PhD Thesis,
California Inst. of Tech., 1949.
75

19. Morris, D. N., A Summaryof the SupersonicPressureDragof Bodiesof Revolution. J. A. S.,p. 622,July 1961.
20. Murk, M. M., TheAerodynamicForcesonAirship Hulls. NASAReport184,1924.
21. Nicolaides,J. D., Missile Flight andAstrodyuamics,BuWepsTN-100A,Washington,D. C., 1959.
22. Nielsen,J. N., andPitts, W.C., Wing-BodyInterferenceat SupersonicSpeedswith anApplica-tion to Combinationswith RectangularWings. NACATN-2677,1952.
23. Pitts, W. C., Nielsen,J. N., andKaattari; G. E., Lift andCenterof Pressureof Wing-Body-Tail Combinationsat Subsonic,Transonic,andSupersonicSpeeds.NACAReport1307,1959.
24. Sims,J. L., Tablesfor SupersonicFlowAroundRight Circular Conesat SmallAngles-of-Attack.NASASP-3007,1964.
25. Sims,J. L., Tablesfor SupersonicFlowAroundRight Circular Conesat ZeroAngle-of-Attack,NASASP-3004,1964.
26. Shapiro,A. H., TheDynamicsandThermodynamicsof CompressibleFluid Flow,Vol. II,RonaldPress,NewYork, 1954.
27. Syverston,C. A., andDennis,D. H., A Second-OrderShock-ExpansionMethodApplicabletoBodiesof RevolutionNearZero Lift, NACAReport1328,1957.
28. Thomas,C. G., UnpublishedWindtunnelDataona .25ScaleTomahawkSoundingRocketTakenat LRC UnitaryandARDCTunnelB, October1966.
29. Thomas,E. S.,WindtunnelTestsof the Aerobee150A. Aerojet-GeneralCorporation,Azusa,California, April 1960.
30. Tsien, H. S.,SupersonicFlowOveran InclinedBodyof Revolution,JAS,p. 480,Vol. 5, 1938.
76

X-712-66-162
APPENDIXA
FIN
A COMPUTERPROGRAMFORCALCULATINGTHE AERODYNAMICCHARACTERISTICSOF FINSAT SUPERSONICSPEEDS
(Exerptof TheoreticalTreatment)
JamesS.BarrowmanSpacecraftIntegrationandSoundingRocketDivision
April 1966
Goddard Space Flight Center
Greenbelt, Maryland
77

LIST OF SYMBOLS
CDW
C L
CL_
C t
C
Ca
C
CP i
C r
d1
d w
F a
F l
K
L
1L
1L r
1 r
1T r
i w
MP
Reference area
Length of airfoil strip chord
Wave drag coefficient : "'_LqA
Lift coefficient FlqA
dC_/a_ (_ = O)
Rolling moment coefficient -Mr
q AL
ac,/_I _ ( 3 = o)
Pitching moment coefficient - Mpq AL
Local pressure coefficient
Length of root chord
Component of ii parallel to the freestream
Portion of (t behind the fin-tip Mach conet
Drag force (parallel to freestream)
Lift force (normal to freestream)
Iv.terference factor
Reference length
Length of airfoil-strip leading-edge region chord
Length of root airfoil leading-edge region chord ,
Length of center region and of center-region chord
Length of airfoil-strip trailing-edge region chord
Length of root airfoil trailing-edge region chord
Distance between the leading edge and the intersection of the Mach cone with the airfoil
strip
Length of local region surface
Freestream Mach number
Pitching moment about the reference axis
78

M r
n
Pt
P_
ct_
I"t
s
x L
XP i
V
Y
_'_y
j)
FL
rT
Pt' P2
S
_L
_T
SUBSCRIPTS
B
B(T)
i
J
LIST OF SYMBOLS (Continued)
Rolling moment about the root chord
Number of strips
Component of 1 normal to the freestream
Local static pressure
Ambient static pressure
Freestream dynamic pressure
dw/d _ ratio
Semispan length
Distance from the reference axis to the airfoil-strip leading edge in a streamwise direction
Center-of-pressure coordinate measured from the reference axis
Distance from the reference axis to the forward region boundary of a local region in astreamwise direction
Center-of-pressure coordinate measured from the root chord
Distance from the root chord in a spanwise direction
Width of airfoil strip
Angle of attack (degree)
. _12 - 1
Leading-edge sweep angle
Trailing-edge sweep angle
Ragion boundaries sweep angles
Ratio of specific heats for air = 1.4
Fin cant angle
Leading-edge wedge half-angle in the streamwise direction
Trailing-edge wedge half-angle in the streamwise direction
Inclination of a local surface to the freestream
Mach cone semivertex angle
Body alone
Body in the presence of the tail
Local region number
Airfoil strip number
79

SUBSCRIPTS
o Value at _ = 0
T Tail alone
LIST OF SYMBOLS (Continued)
Tail in the presence of the body
80

FIN
A COMPUTERPROGRAMFORCALCULATINGTHE AERODYNAMICCHARACTERISTICSOF FINSAT SUPERSONICSPEEDS
BACKGROUND
Calculating the aerodynamic characteristics of the fins of a sounding rocket is one of the basic
steps in calculating the overall aerodynamics of a sounding rocket. Because sounding rockets fly
at supersonic speeds for the greater portion oi_ their flight, the regime at these speeds is of particu-
lar interest.
Methods previously used for calculating supersonic fin aerodynamics (references 1, 2, 3, and 4)
are lacking in accuracy and applicability because of the many assumptions and approximations in-
herent in using them to reach a closed form or nearly closed form solution.
By using a high-speed computer to numerically solve basic theoretical equations, one may ob-
tainanswers rapidly and as accurately as desired. The only restrictions to accuracy are the
assumptions inherent in deriving the basic equations. The theory found to be most amenable to pro-
gramming in Busemann's Second Order Supersonic Airfoil Theory as described in reference 1.
PROGRAM CAPABILITIES AND LIMITATIONS
Given a supersonic fin with chord plane symmetry, at a given Mach number, FIN computes as
functions of angle of attack ( ) the following:
• Lift coefficient, CL
• Wave drag coefficient, CD_
• Pitching moment coefficient, cm
• Center-of-pressure coordinate measured from the reference axis,
• Center-of-pressure coordinate measured from the root chord,
Since , as defined in the program is equivalent to the fin cant angle (:) at _ = 0, the rolling
moment coefficient C, is considereda function of >.
FIN also computes as functions of Mach number the following:
• Lift coefficient slope, CL
• Wave drag at zero angle of attack, CD%
• Pitching moment coefficient slope, Cm
• Rolling moment coefficient slope, c,
81

• Center-of-pressure coordinate measured from the rgference axis at zero angle of attack, x0
• Center-of-pressure coordinate measured from the root chord at zero angle of attack, Y0
The range of -. is from zero to _ma_' as determined by the user, in increments of 1 degree. The
program allows for a maximum of 100 Mach number points, the user specifying the range and
increment of the Mach number.
Since FIN has been designed for use with a four-finned vehicle, the output values of CL, CDw,
Cm, CL_, CDwo, and C_ are for apair of identical fins; the output values of C_ and C_ are for two
pairs of perpendicular fins. The values of _,'_, x0, and T 0 apply only to a single typical fin.
Busemann's Second Order Airfoil Theory is applied subject to the restrictions outlined in
reference 1, pages 192 to 241, with special attention to Figures 10.3 and 10.28. However, the use
of the third-order terms in this program slightly enlarges the applicability shown in this reference.
Busemann's theory is applied to small streamwise airfoil strips, and the strips are summed in a
spanwise direction. In addition, the fin-tip Mach cone is accounted for by applying a correction
factor to the necessary portion of each strip. This correction-factor technique was obtained from
references 1 and 3. The fin-tip Mach cone correction may or may not be included at the user's
discretion.
Figx_re 1 shows the types of hns to which FIN is applicable. These configurations cover all
of the shapes normally used on sounding rockets and missiles. The program input pattern for each
type is given in the section on usage. A listing of FIN in FORTRAN IV is given in Appendix A.
AERODYNAMIC THEORY
Busemann's Second Order Airfoil Theory has been applied to two-dimensional airfoil strips
with the following assumptions:
• All parts of the airfoil surface are in supersonic flow and make small angles with the flow.
This implies low angles of attack.
The leading edge is sharp. The trailing edge must be sharp for a double wedge fin or a
modified double wedge. For a single wedge and a modified single wedge, the effect of the
blunt base is neglected.
• The shock waves are all attached.
• Each region of flow over the surface acts independently of the others.
The basic local pressure coefficient equation of the Busemann theory is a third-order series
expansion:
82

(a] Modified Double Wedge (b) Double Wedge
-_--_- t--
(c)Modified Single Wedge
----------'---------1
(d) Single Wedge
Figure 1-Fin Configurations
83

where
K I
2
(2a)
K 24 _4
(2b)
K_
I)M _ (2 2 _ 7) -5)M 6 _ 10(, * I)M 4 - 12M 2 * 8
6"77
(2c)
If the flow-over the surface region inclined at v_ to the flow has been preceded by a single
compressive shock wave anywhere upstream in the flow, the value of K" is:
K* (3), , t)M* [(s - 3,)M_ + 4(_ - 3)M_ , s]48
If the flow upstream of the region in question has contained only expansive shock-free flow,
K" = 0. % is the inclination of the leading edge surface. Essentially, the first three terms of
equation 1 represent the first-, second-, and third-order pressures on the surface region respec-
tively. The K" term is the third-order irreversible pressure rise through the bow shock. The
index, i, indicates the surface for which the pressure coefficient is being calculated.
The pressure coefficient of equation 1 is applied to a typical airfoil region, including the fin-tip
Mach cone, by dividing the region into two portions at the intersection of the airfoil strip and the
Mach cone (Figure 2). A correction factor of 1/2 is applied to the local pressure coefficient for the
region within the Maeh cone. The center of pressure of each portion is taken as the midpoint of
the length of that portion. By this means, equations are obtained for the local lift (F_), drag (Fd_),
local center of pressure (_,), and, hence, the local pitching moment (Mp_):
F| : C v d 1 - (4)
Fd, = Cp n I - (5)
½d i 1 - r i + --7 +_'- - ri
E, : (6)r_
2
%, : r, _ (7)l I
84

STRIP _X IIw
\REFERENCE
AXIS
Xp i
MACH
\CONE
Iw \ :- I
_, \
Y
REGION
BOUNDARIES
AIRFOIL
STRIP
d
Figure 2-Mach Cone Correction Geometry
85

The airfoil-strip lift (Fij) , drag (Fd), and pitching moment (Mv ) totals are then computed by summingJ J
the local characteristics.
6
F l : _ F l (8)
i=1
F d • F dJ
5
V _
l=l
(9)
6
ZMpi Mp
t=l
(I0)
The strip rolling moment about the root chord is calculated from the airfoil lift and strip span-
wise position, y:
: (ii)Mrj YFIj
The total characteristics over the entire fin are then computed by summing the airfoil strip
characteristics in a spanwise direction.
(12)
(13)
Mp = _ M% (14)}:1
(15)
The forces and moments computed in equations 4 through 15 are actually divided by the ambient
dynamic pressure (q_) and strip width (Ay). Thus, the associated coefficients are:
86

2F, ":_.y
CL : A (2 fins)(16)
2 F d • E y
C_w = A (2 fins)(17)
2 M • _, yp
Ca : AL (2 fins)
4M r • _y
CI : AL (4 fins)
(18)
(19)
The center-of-pressure coordinates are calculated from the respective moments and the
appropriate lift forces.
M
: o (20)F, cos
M
_( : _ (21)F t
To obtain the linear slope coefficients near _ = 0 at a given Mach number, the values of CL,
C, and Cz are calculated at a = 1° and are taken as the slope values ct_ , c, and C_ (all per de-
gree). The slope values per radian are obtained by the proper conversion of radians to degrees.
Thus:
CL-_ 180 (22)rad. _r CL _ = 1
% , ) (23>tad. _ a = I
Cl 8 1_0rad. - --(cJi_ = ,) (24)
The zero angle-of-attack values of CDw, )(, and _ are simply their respective values at a = 0.
CONFIGURATION AND GEOMETRY CONSIDERATIONS
The user indicates the shape of the fin configuration by specifying the root chord length (Cr ),
root airfoil leading and trailing edge region chord lengths (1L, and IT,), leading and trailing edge
87

sweep angles (F u and V t ), region boundary sweep angles (T 1 and V2 ), and the fin semispan length
(S) (Figure 3). The program then computes the distance from the reference axis to the airfoil-strip
leading edge in the streamwise direction (X L), airfoil chord length (C), and the airfoil region chord
lengths (l L and I t) as functions of the spanwise coordinate of the airfoil strip.
X L : y tan[ c cos ._ (25)
C y (tan[ T tan L) " Cr (26)
1L : y(tan;' 1 - tanF'L) + 1L (27)
1T : y(ta. m- ta T )+ (28)
The width of the airfoil strip is determined from the number of strips (n) desired by the user.
SZy : -- (29)
n
The airfoil strip crossection is assumed to be symmetrical about the chord line. The most
general crossection configuration is the modified double wedge (Figure la). The other three types
(Figures lb, lc, and ld) are special cases of this basic shape. Figure 4 shows in detail the general
crossection, which has six separate flow regions. As can be seen in this figure, the surface region
lengths are determined by specifying the leading- and trailing-edge wedge half angles in the stream-
wise direction, _L and _T"
1 1 : I 4 =--
lL
vcos L (30)
1T (31)13 [6
COsr
T
12 : I s : C - l L - 1T (32)
The program computes the local-surface inclination angles (_i) as functions of _:
l _ L (33a)
_;2 : - , (33b)
(33c)T)3 : - *'T - ':
74 : L + "_ (33d)
88

S
1_ -_ /'_ 12
14
SECTION A-A TYPICAL AIRFOIL
Figure 3-Fin and Airfoil Geometry
89

L --i _
'L "4
/J
c
IM
Jj _'2
mf
J
J
Figure 4-Airfoil Angles
!
go

"_s : ' (38e)
% -' +o (38f)'T
From these, the streamwise and normal components of the region lengths are calculated.
as:
d = 1 cos _, (i I - 6)
(34)n : 1 "sin ":i _i :: 1 " 6)
The distance of the forward local-region boundaries from the reference axis are then determined
xp, ×p_ x L (35a)
xp2 :: x L _ {t, (35b)
Xp_ : x L + d z + d 2 (35c)
Xps XL _ d_ (35d)
×P6 : XL _ (t4 * ds (35e)
FIN-TIP MACH CONE CORRECTION
The Mach-cone angle (_,) is a direct function of the Mach number.
a, : Arctan (1) Arcsin (1) (36)
For an airfoil strip at a spanwise direction y, the intersection of the strip and the Mach cone is a
distance I w from the leading edge.
1 w : (S - y)tan_ L ÷ tan(90 --) (37)
But, by trigonometric identities and the use of equation 37, this may be reduced to:
1 w : (S - y) (tan, ,. + ) (38)
If I w is greater than or equal to the chord length, there is, of course, no actual intersection and no
correction is necessary. If i w is such that
C " 1w Z C- l T
91

thentheratio of theportionof Ir falling behindtheMachconeto Ir is:
c- 1W
r 3 : r 6 -- l T
AIso,
r I : r 2 : 1- 4 : r 5 0
If 1, is such that
C- lv _ 1w _ I L
then the corresponding ratio for the middle regions is
(39)
(40)
Also,
and,
If 1w is such that
C- 1T 1,
r2 : rs |M
r 3 r 5 ],
C- lT
r I r 4 0
1 1 " 0
(4t)
(42a)
(42b)
then the ratio for the leading edge region is
r I r 4
I L - 1 w
1L
(43)
Also,
r2 r 3 r s r 5 1.0(44)
These ratios are the values used in equations 4, 5, and 6 for calculating the local lift, drag, and
center of pressure. In these equations, the pressure coefficient in the portion behind the Mach cone
is taken as half the value of the C calculated by equation 1.P
92

REFERENCES
1. Hilton,W. F., HighSpeedAerodynamics.Longmans,GreenandCo. NewYork, 1951.
2. Pitts, W.C., Nielsen,J. N. andKaattari, G.E., Lift andCenterof Pressureof Wind-Body-TailCombinationsat Subsonic,Transonic,andSupersonicSpeeds.NACAReport1307,1959.
3. Shapiro,A. H.,The DynamicsandThermodynamicsof CompressibleFluid Flow. Vol. H.RonaldPress. NewYork, 1954.
4. Harmon,S.M. andJeffreys,I., TheoreticalLift andDampingin Roll of ThinWingswithArbi-trary Sweep and Taper at Supersonic Speeds Supersonic Leading and Trailing Edges. NACA
TN2114. May 1950.
5. Thomas, E. S., Windtunnel Tests of the Aerobee 150A. Aerojet General Corp., 1960.
6. McNerney, J. D., Aerobee 350 Windtunnel Test Analysis. Space General Corp. January_ 1963.
93
¢