Embed Size (px)
Citation preview

S T O C H A S T I C O P T I M I Z A T I O N MODELS FOR
S T R U C T U R A L - R E L I A B I L I T Y A N A L Y S I S
By James J. Zimmerman, 1 Associate Member, ASCE, J. Hugh Ellis, 2 and Ross B. Corotis, a Fellow, ASCE
ABSTRACT: The present paper provides a method for the identification of failure modes that contribute significantly to the estimate of the system probability of failure in rigid-plastic structures. For structures where loads and resistances are random variables, a decision rule is presented for the identification of failure modes in series systems based on their contribution to the system probability of failure. Stochastic programs based on this decision rule for failure mode selection are developed for the identification of failure modes in structures. Examples illustrate the use of these mathematical programs in identifying significant failure modes in rigid-plastic structures where axial force-moment interaction is included.
INTRODUCTION
In structural system-reliability r e sea rch - - fo r example, the identification of collapse m o d e s - - i t has been popular to assume rigid-plastic structural behavior. This assumption removes several analytical complications such as load path dependence but does so at the expense of realism (Ditlevsen and Bjerager 1986). Its accuracy in predicting ultimate structural behavior, how- ever, has been verified for many types of structures (Neal and Symonds 1952; Baker and Heyman 1969).
In conventional rigid-plastic analysis of framed structures, it is assumed that the requisite strength of each member is dependent only on the internal moments in that member. In reality, the presence of axial force changes moment capacity. This axial force-moment interaction is described through a yield surface which is a function of the section geometry. This interaction, in turn, complicates the determination of the deterministic collapse mode and load factor (Cohn and Rafay 1974). This more accurate rigid-plastic model has not been fully integrated with available system-reliability meth- ods-spec i f ica l ly , mathematical programming methods for reliability anal- ysis.
When undertaking system-reliability analyses of complex rigid-plastic structures, one must theoretically consider all possible failure modes. It soon becomes apparent, however, that the number of potential failure modes can be very large even for relatively small, indeterminate structures (Got- man 1981).
Recent research has concentrated on methods to identify a relatively small number of significant failure modes in order to reduce the system-reliability analysis to a manageable task. Several of these methods fall into the category of truncated enumeration techniques (Melchers and Tang 1984). Two trun-
1Sr. Res. Engrg., Exxon Production Res. Co., P. O. Box 2189, Houston, TX 77252. 2Assoc. Prof., Dept. of Geography and Envir. Engrg., Johns Hopkins Univ.,
Baltimore, MD 21218. 3Assoc. Dean and Hackerman Prof. of Civ. Engrg., G.W.C. Whiting School of
Engrg., Johns Hopkins Univ., Baltimore, MD. Note. Discussion open until June 1, 1993. To extend the closing date one month,
a written request must be filed with the ASCE Manager of Journals. The manuscript for this paper was submitted for review and possible publication on August 21, 1991. This paper is part of the Journal of Struetural Engineering, Vol. 119, No. 1, January, 1993. �9 ISSN 0733-9445/93/0001-0223/$1.00 + $. 15 per page. Paper No. 2527.
223
J. Struct. Eng. 1993.119:223-239.
Dow
nloa
ded
from
asc
elib
rary
.org
by
Ond
okuz
May
is U
nive
rsite
si o
n 11
/07/
14. C
opyr
ight
ASC
E. F
or p
erso
nal u
se o
nly;
all
righ
ts r
eser
ved.

cated enumeration techniques which identify failure modes based on their marginal probabilities of failure have become popular in system-reliability analysis. The beta-unzipping and branch-and-bound methods (Thoft-Chris- tensen and Murotsu 1986) employ heuristics to limit and guide failure-mode enumeration to identify modes with relatively large modal probabilities of failure. This results in the partial enumeration of all possible failure modes. Once the set of stochastically significant 'modes has been identified, an estimate of the system probability of failure is made using an appropriate set of system bounds.
As an alternative to truncated enumeration, mathematical programming has been used to identify failure modes in rigid-plastic structures. Ma and Ang (1981), Nafday et al. (1988a, b), Arnbjerg-Nielsen and Ditlevsen (1990), Sim6es (1990a, 1990b), Ellis et al. (1991) and others developed mathematical programs to identify failure modes in frame structures. These methods differ from enumeration techniques in that they make use of linear and sometimes nonlinear constrained optimization techniques to identify a small number of failure modes, thereby avoiding complete failure-mode enumeration. As with the truncated enumeration techniques, these methods do not directly consider the effect of the identified modes on the system probability of failure during the identification process, other than to identify modes with relatively high probabilities of failure. The branch-and-bound method does include system-reliability effects, following the identification of new modes.
Recognition of the problems in dealing with approximate structural models and the large number of potential failure modes leads to a statement of the focus of the present paper. The goal is to develop a method for failure- mode identification that incorporates a more realistic structural model (in- cluding axial force-moment interaction) and identifies failure modes based on their contribution to the estimate of the system probability of failure.
DETERMINISTIC RIGID-PLASTIC ANALYSIS
A number of assumptions and idealizations are typically made when per- forming rigid-plastic analysis (Baker and Heyman 1969). The structural members are idealized as rigid links connected by nodes. The nodes are idealized as plastic hinges and all deformation is concentrated at these nodes (which have unlimited ductility). No deformations occur at these hinges until a force (or stress) limit is reached; deformation then occurs without an increase in nodal force. Members are assumed to be braced such that no lateral torsional buckling occurs, and section properties are such that web crippling and flange buckling can be ignored. Additionally, the structure is assumed to be braced so that member and frame instabil!ty cannot occur.
In the most common application of plastic analysis techniques for frames, the strength of a plastic hinge is assumed to be dominated by its moment carrying capacity--the effect of axial force and shear on hinge formation is neglected. That is, no deformation occurs at the hinge until the moment at the hinge equals the plastic moment capacity Mp. Once the moment at the hinge reaches the plastic moment capacity, unlimited rotation of the joint can occur.
For many structures, axial forces can be relatively large, and the presence of axial force in bending members reduces moment carrying capacity (Onat and Prager 1953). For hinges where axial forces and moments are important, the hinge is modeled as a rotational spring with hinge rotation 0 and an axial Spring with axial deformation A. It is convenient here to define two nondimensional force quantities
224
J. Struct. Eng. 1993.119:223-239.
Dow
nloa
ded
from
asc
elib
rary
.org
by
Ond
okuz
May
is U
nive
rsite
si o
n 11
/07/
14. C
opyr
ight
ASC
E. F
or p
erso
nal u
se o
nly;
all
righ
ts r
eser
ved.

M m - with Me = r [m[ - 1
Me . . . . . . . . . . . . . . . . . . . . . . . . (1)
N n with Ne cryA In[ -< 1
Np . . . . . . . . . . . . . . . . . . . . . . . . . (2)
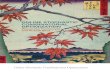
where N and M = axial force and moment at the section; Ne = plastic axial capacity (squash load); Z = plastic section modulus; A = cross-section area; and ~ry = yield stress of the material. Corresponding to the (m, n) force pair are two nondimensional displacements, (0, X), where • = (ANe/ Me). Assuming Drucker's postulate (Sawczuk 1989) applies for a given cross section, a yield surface (e.g., see Fig. 1) can be constructed that is convex. Values of m and n that fall on the yield surface produce hinge deformation; those inside the yield surface do not. Combinations of (m, n) outside the yield surface cannot occur for a rigid-plastic material.
The associated flow rule (normality rule) is used to relate hinge forces to relative hinge displacements (Hodge 1959; Polizzotto and Mazzarella 1979). The yield surface is designated by the function f(m, n) = 0, with the displacement (flow) vector q extending from any arbitrary point x on that surface. As shown in Fig. 1, the magnitude of the component of the flow vector in the n-direction is IXX and the magnitude of the component of the flow vector in the m direction is IX0, where Ix is an arbitrary constant. The associated flow rule states that the flow vector q is normal to the yield surface at all points on f(m, n) = 0. That is
dm X dn 0
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . (3)
In classical plastic analysis, the flow rule relates the velocity vector ~1, rather than the displacement vector q to the yield surface. With rigid-plastic
m,O
f(m,n)= x ~ # X
i
n~X
f FIG. 1. General Yield Surface
225
J. Struct. Eng. 1993.119:223-239.
Dow
nloa
ded
from
asc
elib
rary
.org
by
Ond
okuz
May
is U
nive
rsite
si o
n 11
/07/
14. C
opyr
ight
ASC
E. F
or p
erso
nal u
se o
nly;
all
righ
ts r
eser
ved.

behavior the velocity and displacement vectors point in the same direction and either may be used (Nielsen 1984).
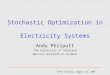
Consider now the structure illustrated in Fig. 2, in which plasticity is concentrated at the 24 potential hinge locations within the structure. The kinematic or upper-bound theorem of plasticity states that for any kine- matically admissible set of displacements, the calculated load factor k is greater than or equal to the critical collapse load factor. If all kinematically admissible displacement fields are evaluated, the displacement field asso- ciated with the smallest load factor is the critical mechanism and possesses the critical collapse load factor..
The method of superposition of elementary mechanisms is frequently used as a convenient way to produce kinematically admissible mechanisms. For the superposition of mechanisms method, it is necessary to identify a set of elementary mechanisms. The set of elementary mechanisms is a set of ki- nematically admissible displacement fields that are linearly independent, i.e., no elementary mechanism can be obtained from a linear combination of other elementary mechanisms. The number of elementary mechanisms is a function of the degree of redundancy of the framed structure r and the number of critical sections s. For analyses considering axial force-moment interaction (i.e., the yield surface is a function of m and n), the number of elementary mechanisms h is equal to the number of unknown yie'd surface force quantities (m and n at each critical section) less the redundancy of the structure, h = 2s - r.
The superposition-of-mechanisms method produces kinematically admis- sible mechanisms by taking linear combinations of the elementary mecha- nisms. The rotation and axial displacement of any critical section is obtained from a linear combination of the displacements in the elementary mecha- nisms. Letting % and Aij be the rotation and axial displacement, respectively, of the jth critical section in the ith elementary mechanism, the rotation and axial displacement of the jth section are
H
2 H
8
r 5
b
V2 I V 4
r r �9
9 i0, 18 19 20, 14
I 1., i 6 1 15 16 17
7 6.1 m ~ 6.1 m
FIG. 2. Two-Bay, Two-Stow Example
226
3.66 m
2
3 . 6 6 ra
J. Struct. Eng. 1993.119:223-239.
Dow
nloa
ded
from
asc
elib
rary
.org
by
Ond
okuz
May
is U
nive
rsite
si o
n 11
/07/
14. C
opyr
ight
ASC
E. F
or p
erso
nal u
se o
nly;
all
righ
ts r
eser
ved.

h Oj -- ~ Oql~ j = 1 . . . . . s . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . (4)
h
Aj = E 2~ut, j = 1 , . . . , s . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . (5) i = 1
where ti = participation factor for the ith elementary mechanism. Defining M m and Nei to be the plastic moment and axial capacities of the jth critical section, the nondimensional axial displacement of the jth section is
AjNI.j j = 1 , . . . , s . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . (6) Xi = M ej
The internal and external work done by any kinematically admissible mechanism can be expressed in terms of the hinge displacements and the external work done in the elementary mechanisms. Letting M i be the mo- ment at the jth hinge and Nj the axial force, the internal work done by the mechanism is
w, . , = (Mj0j + N ja j ) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . (7) j = l
By algebraic manipulation of (7) and application of the flow rule (3), the internal work can be written as
( Win t = ~,__ M p j O j m j - rlj . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . (8) j = X dnj ]
The yield surface equation for the jth hinge, f (m/, nj) = O, and the relationship from the flow rule (3) form a system of two equations with four unknowns (m/, n/, Oj, • In general, these equations can be solved and used to eliminate the two force variables flom (8) resulting in a function, g(Oj, • which depends only on the nondimensional displacements at a hinge. The internal work for any kinematically admissible mechanism with general yield surfaces is
Win, = ~ Me~g(Oj, X j) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . (9) j= l
where g(0,, X j) = yield surface specific. Thus for any kinematically admissi- ble mechanism, the internal work is known without having to determine the internal forces.
The external work done by the ith elementary mechanism is ei, which is the work done by the unfactored applied loads moving through the dis- placements of the mechanism. Using the superposition-of-mechanisms method, the external work done by the factored loads in any kinematically admissible mechanism is
h
kW~xt = k ~,, eiti . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . (10) i = 1
An interesting and practical special case of the plastic collapse problem is for plastic hinges which have a piecewise linear yield surface or a nonlinear surface which can be closely approximated by linear segments. Fig. 3 shows
227
J. Struct. Eng. 1993.119:223-239.
Dow
nloa
ded
from
asc
elib
rary
.org
by
Ond
okuz
May
is U
nive
rsite
si o
n 11
/07/
14. C
opyr
ight
ASC
E. F
or p
erso
nal u
se o
nly;
all
righ
ts r
eser
ved.

m j Jlb~
-~-C
k= q
k=c+l=6 I / nj j k=d
FIG. 3. Piecewise Linear Yield Surface
a general convex, piecewise linear yield surface for the jth hinge of a struc- ture. The surface is composed of d line segments, of which c are in the positive m region. The equation of the kth segment is mf = wknk + b~"
�9 / ] . 1 "
Associated with the kth segment of the yield surface, are the nondlmen- sional displacements, 0f and Xf. Now, let 0f be restricted to be positive for all k. For a given value of the force pair (rnj, hi) , at most one displacement pair (0f, • will be nonzero [except at vertices of the yield surface where the displacement is not uniquely defined by the force pair (Hodge, 1959)]�9 The rotation and nondimensional axial deformation of the ]th hinge can be written
d
o,= of- E k = l k = c + l
O~ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . (11)
d
k = l k = c + l
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . (12)
and the internal work done by the jth hinge can be shown to be
( ' t Mejg(Oi, • j) = Ml,j 2 b)Of - Z bfO~ k = l k = c + l
. . . . . . . . . . . . . . . . . . . (13)
PROBABILISTIC RIGID-PLASTIC ANALYSIS
In the present study, rigid-plastic structures are assumed to have random resistances (i.e., plastic moment and axial capacities). In particular, the
228
J. Struct. Eng. 1993.119:223-239.
Dow
nloa
ded
from
asc
elib
rary
.org
by
Ond
okuz
May
is U
nive
rsite
si o
n 11
/07/
14. C
opyr
ight
ASC
E. F
or p
erso
nal u
se o
nly;
all
righ
ts r
eser
ved.

variability in structural resistance is assumed to be dominated by the vari- ability in the material strength as opposed to variability in section geometry, For a general cross section with a yield surface as shown in Fig. 1, therefore, the shape of the yield surface is deterministic, since it is a function only of section geometry. Similarly, the ratio of the plastic capacities, Me/Np, is deterministic. The applied loads are assumed to be random.
The internal work done by any rigid-plastic mechanism considering axial force-moment interaction is given by (9). The internal work is a random variable since it is a linear combination of random variables (the plastic moment and axial capacities). The external work done by each elementary mechanism ei is random due to the work being done by random loads. Consequently, the external work done by any collapse mechanism formed by a linear combination of the elementary mechanisms (10) is also random.
It is convenient at this point to define a random variable Z
2 Z = Want - Wext -- Mejg(Oj, • - ~ eiti . . . . . . . . . . . . . . . . . . . (14) j = l i = 1
which is a safety margin or performance function (Moses 1974). Values of Z greater than zero are considered safe and less than zero, unsafe or failed. The boundary (Z = 0) is referred to as the limit state for the mechanism.
Since Z is the sum of random variables, the mean of Z is easily calculated. Letting bold faced characters represent vectors or matrices, and the prime symbol, ('), indicating the transpose of a matrix, the mean of Z is,
mz = g(O, X ) ' m M - t'me �9 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . (15)
where g(O, X) = vector of deterministic internal work coefficients de- pendent on the yield surface and the displacements in the mechanism [see (9)]; mM = vector of the means of the plastic moment capacities; t = vector of elementary mechanism participation factors for the mechanism; and, me = vector of external work means for the elementary mechanisms. The dimension of the vectors is consistent with the summation in the work expressions given in (14) (i.e., s and h).
Letting VM be the covariance matrix of the moment capacities and Ve be the covariance matrix of the external work of the elementary mechanisms, the variance of Z is
~zz = g(| X)'VMg(| X) + t'Vet . . . . . . . . . . . . . . . . . . . . . . . . . . . . (16)
If the probability density function of the random variable Z, fz, is known, then the probability of failure of a kinematically admissible mechanism, P(Z -< 0), can be calculated.
SYSTEM RELIABILITY
During the development of structural reliability theory, methods for ana- lyzing the reliability of individual members and failure mechanisms received the majority of the attention of researchers. In reality, analysis of the struc- tural system is required to evaluate the safety of the structure as a whole (Ditlevsen and Bjerager 1986). In rigid-plastic structures, formation of a collapse mechanism constitutes system failure and therefore, a rigid-plastic structure can be modeled as a series system with each element of the series being a failure mechanism.
The probability that such a system fails is the probability that any failure
229
J. Struct. Eng. 1993.119:223-239.
Dow
nloa
ded
from
asc
elib
rary
.org
by
Ond
okuz
May
is U
nive
rsite
si o
n 11
/07/
14. C
opyr
ight
ASC
E. F
or p
erso
nal u
se o
nly;
all
righ
ts r
eser
ved.

mechanism occurs. If there are n failure mechanisms, and if Z~ through Zn are the safety margins for these n modes, then the system probability of failure is found by evaluation of the n-dimensional integral of the joint probability density function (fz)
p;, = 1 - ~: . . . f : fz(z l , Z 2 , . . . , 2 n ) d z ~ , d z 2 , . . d z . . . . . . . . . . . (17)
If all mechanisms can be determined and f z is known, the system prob- ability of failure could be calculated directly from (17). The number of mechanisms will be very large, but only a small number contribute signif- icantly to the system probability of failure. A method for identifying the few significant rigid-plastic failure modes based on their contribution to the system probability of failure is now presented.
DECISION RULE FOR FAILURE MODE SELECTION
Consider a series system with a total of n failure modes. Assume n is a large number and it is desired to select only m of these failure mechanisms. The question arises of which m modes should be selected from the total of n such that the best estimate for the system probability of failure is obtained? One method is to select the m modes with the highest marginal probabilities of failure. This method of mode selection ignores the statistical relationship among the failure modes. To achieve the stated goal of obtaining the best estimate for the system probability of failure, the m modes should be selected to give the maximum value for the estimate of the system probability of failure,/~sss. That is, one should select the m modes from all possible modes such that the following expression is maximized:
maximize: & s = l - f : . . . f : f z ( Z l , Z2, . . . , z , , 3 d z ~ d z 2 . . . dz , , ,
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . (18) An alternative to selecting all rn modes simultaneously is to select modes
one at a time. The estimate ofprs is maximized at each cycle of this selection procedure. In the first cycle, the mode having the greatest marginal prob- ability of failure is selected. In the second cycle, the mode is selected such that the probability of the union of the first mode and the second mode occurring is maximized. In general, the ith mode is selected such that the probability of the union of the occurrence of this mode with all previously selected modes is maximized. This process is terminated when the incre- mental increase in the estimate for the system probability of failure from one cycle to the next is below a specified tolerance or when the number of selected modes reaches some predetermined value (m). At any cycle of the analysis, pf, is a lower bound on Pl,.
It is possible that the m modes selected in this cyclic procedure will not be the same m modes if they were all selected at once using (18). This can be simply illustrated for the case of three models in which the least-reliable mode is highly correlated with the other two modes, which themselves have a lower correlation. The cyclic procedure would select the least-reliable mode, followed by one of the remaining two. If all three modes have com- parable reliabilities, the two that give the better estimate of system reliability could be, however, the second and third modes, due to their lower corre- lation. If the criterion for stopping the cyclic procedure is a small increase
230
J. Struct. Eng. 1993.119:223-239.
Dow
nloa
ded
from
asc
elib
rary
.org
by
Ond
okuz
May
is U
nive
rsite
si o
n 11
/07/
14. C
opyr
ight
ASC
E. F
or p
erso
nal u
se o
nly;
all
righ
ts r
eser
ved.

in `ojs from one cycle to the next, then any difference between the two sets of modes will not result in a significant difference in `oi,. Additionally, the cyclic procedure gives the flexibility of not having to decide a priori the number of modes to consider. Modes can be selected until the cyclic increase in ,Or, between cycles is below a specified tolerance.
Applying the cyclic procedure to the selection of stochastically significant rigid-plastic failure modes, the objective of the first cycle of the analysis is to find the mode having the greatest probability of failure given that all kinematically admissible modes are to be considered. In the mathematical programming format, the optimization problem can be stated as
f~ maximize: pf = P[Z ~ 0] = _~ f z dz . . . . . . . . . . . . . . . . . . . . . . (19)
k
subject to: 0 i - ~ 0ijti = 0 j = 1 . . . . . s . . . . . . . . . . . . . . . (20) /=1"=
Mpj t ,
N~j. Xj - ,~1 ~ Aijt' = 0 j = 1 , . . . , s . . . . . . . . . . . . . . . . . . . . . . . (21)
where the specific kinematic constraint set and form of Z are selected for the type of structure and yield surface being analyzed. The constraints given by (20) and (21) ensure kinematic admissibility and are deterministic since no load random variables appear and the resistance random variables appear only as a deterministic ratio (Mp/Ne).
Assuming the loads and resistances to be jointly normally distributed, then Z is normally distributed with mean and variance given by (15) and (16)--the effect of this assumption is considered in Zimmerman et al. (1992). The objective function of the mathematical program to find the least-reliable mode can be written as
f o _ mz maximize: p f = _ f z d z = q b \ - - ~ - z } = ~ ( - [ 3 ) . . . . . . . . . . . (22)
where alp(--) = cumulative normal probability distribution; and [3 = reli- ability index. Using this relation between 13 and Pr, the mathematical pro- gram can be converted from a maximization problem to an equivalent min- imization problem. Solution of either problem yields the same value to the decision variables at the optimal solution. Thus, the mathematical program to find the least-reliable mode can alternatively have the objective function
m z g(@, X)'m~ - t'me minimize: 13 - crz - V'g(t~, X)'VMg(I~, X) + t'Vet . . . . . . . . . . (23)
Similar mathematical programs were suggested by Sim6es (1990b) and Arnbjerg-Nielsen and Ditlevsen (1990) for the identification of the least- reliable mode.
The values of the decision variables at the optimal solution (O, X, t) define the least-reliable mechanism, and the value of the objective function gives the reliability index for that mode. The probability of failure for this mode is then easily obtained by evaluation of the standard normal distri- bution function at - [3.
Since a single mode will not, in general, provide an accurate assessment of system reliability, the cyclic procedure described above is used to identify
2 3 1
J. Struct. Eng. 1993.119:223-239.
Dow
nloa
ded
from
asc
elib
rary
.org
by
Ond
okuz
May
is U
nive
rsite
si o
n 11
/07/
14. C
opyr
ight
ASC
E. F
or p
erso
nal u
se o
nly;
all
righ
ts r
eser
ved.

a second mechanism. The criterion for selection will be such that when considered with the mode identified in the first cycle of the analysis, one obtains the best estimate of the system probability of failure. A mathematical program can be formulated to identify this second mode based on the de- cision rule
maximize: pe, = P[Zl <- O U Z2 <- O] = l - f : f : fz(zl, z2) dzl dz2
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . (24)
subject to (20) and (21). The limit state Z 1 is determined by the mode identified in the first cycle of the analysis. Its mean and variance are now constants. The second limit state Z2 is unknown and its mean and variance are a function of the decision variables of the problem, (0 , X, t), as is the correlation of the first mode with the second. The specific form of the mean, variance, and kinematic constraint sets for this second mode are yield- surface dependent. The kinematic constraint set does not change from the first cycle of the analysis to the second since only one mode is being iden- tified. Solution of this mathematical program will yield the second mode, and the value of the objective function will be the best estimate of the system probability of failure based on two modes when one of those modes is the least-reliable mode.
In general, after n - 1 modes have been identified through the solution of n - I mathematical programs, the mathematical program to find the nth mode giving the best estimate of the system probability of failure is
maximize: Pls = P [ Z 1 <- 0 U . . . U Z. <- O]
= 1 - ~ : . . . ~ : f z ( Z t . . . . , Z n ) d Z l , . . . , d z , , . . . . . . . . . . . . . . . . . (25)
where the mean and variance of the nth mode are functions of the decision variables, as is the correlation of the nth mode with all previously identified modes.
This cyclic solution of the mathematical programs continues until a pre- scribed number of modes have been identified or the change in/~r, from one cycle to the next is below an acceptable limit. Note that for all cycles of the analysis, the kinematic constraint set remains the same. The only change is to increase the dimension of the integral in the objective function as cycles progress.
For illustration, the mathematical program to identify the nth mode of
maximize: ~ # = P [ Z x <- 0 U . . . U Z n <-- 0]
= 1 - f : . . . f f f z ( z a , . . . , z , , ) d z l , . . . , d z , , . . . . . . . . . . . . . . . . . (26)
subjectto: ( ~ 0 ~ - k = l k=c+l~ 0~) - ~ou t=0 i= l j = 1 . . . . . s
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . (27)
1 s ~ p j k = c + l i = 1 " "
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . ( 2 8 )
232
J. Struct. Eng. 1993.119:223-239.
Dow
nloa
ded
from
asc
elib
rary
.org
by
Ond
okuz
May
is U
nive
rsite
si o
n 11
/07/
14. C
opyr
ight
ASC
E. F
or p
erso
nal u
se o
nly;
all
righ
ts r
eser
ved.

0~->0 j = 1 , . . . , s k = 1 , . . . , d . . . . . . . . . . . . . . . . . . . . (29)
where the mean and variance of the nth limit state Z, are given by (15) and (16); and the jth element of the vector, g(O, X), is
d
g(0j, • = ~ b~O k - Z b~'O~ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . (30) k = l k = c + l
SOLUTION TECHNIQUES
The mathematical programs to find the stochastically dominant failure modes given in general form in the last section have nonlinear objective functions and linear constraints. Two general-solution techniques are avail- able for nonlinear optimization problems: direct-search methods and gra- dient-based techniques. A gradient-based technique was found to be more flexible and effective for this analysis. The nonlinear optimization computer program MINOS (Murtagh and Saunders 1987) was used to solve these stochastic programs.
Since the mathematical programs of concern here are nonconvex, then the identified mode (the solution to the mathematical program) is starting- point specific, and a set of starting points was used in an attempt to, at least, find good local optima. A generic set of starting points was determined such that an apparent global optimum was identified for the large number of examples considered by solution of the problem using this set of starting points. For frame problems, the set of beam, sway, and joint elementary mechanisms was used as starting points. In addition to this set of frame elementary mechanisms, a set of starting points to encourage the identifi- cation of combined mechanisms was also used. The total number of starting points for rectangular frames is always less than or equal to 1.5 times the number of beam + sway + joint elementary mechanisms--a trivial number compared to the total number of potential mechanisms.
It is important to note that there is no guarantee of global optimality with this starting-point procedure, or any other nonconvex programming pro- cedure, for that matter. The purpose of specifying a set of starting points is not to try to guess the global optimum before solution of the optimization problem, but to try to be in the neighborhood of all likely solutions. Only a very small fraction of possible solutions are being used as starting points, but these starting points initiate the optimization in the area of all generic types of failure modes.
During solution of the mathematical program, the objective function and its gradients must be evaluated numerous times. Continuing the assumption of jointly normal safety margins for the limit states, evaluation of the mul- tinormal integral in the objective function given by (25) and its gradients is computationally intensive for dimensions over two. In order to improve the efficiency of the solution of the mathematical programs, a second-order system bound replaces the integral expression for/Jfs (25) for cycles 3 and greater. In structural reliability, second-order bounds are frequently used and are considered sufficiently narrow for most structural systems (Grimmelt and Schu6ller 1982). Second-order bounds include not only the marginal probability of failure for each element of the series, but also include infor- mation about the pair-wise relationships between failure events. The effi- ciency of the gradient calculations is also greatly enhanced using these bounds. One such simplified lower bound is the first- and second-order terms of the well-known inclusion-exclusion series for the probability of the union of
233
J. Struct. Eng. 1993.119:223-239.
Dow
nloa
ded
from
asc
elib
rary
.org
by
Ond
okuz
May
is U
nive
rsite
si o
n 11
/07/
14. C
opyr
ight
ASC
E. F
or p
erso
nal u
se o
nly;
all
righ
ts r
eser
ved.

events. Using this second-order lower bound as the objective function, the mathematical program to find the nth mode (given that n - 1 modes have already been identified) becomes
maximize: P[Z1 ~ 0] - P [ Z i <- 0] - E P[Zi ~ o fl z j <_ o i=2 ,/=1
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . (31)
subject to (20) and (21). The gradients of the objective function are given by Zimmerman (1991).
After the failure modes have been identified by using this bound with the cyclic procedure, a closer estimate of Pys can be obtained by using the limit states of the identified modes with a Monte Carlo simulation or a single evaluation of the n-dimensional multinormal integral to find the value of the estimate of pr
EXAMPLES
Two examples are presented to illustrate the application of the cyclic procedure for identifying significant failure modes and obtaining estimates of the system probability of failure. All random variables are assumed to be jointly normally distributed. The strength of sections listed on a single line of the section property table (Tables 1 and 2) are perfectly correlated with one another, and uncorrelated with sections on other lines. All load random variables are assumed to be uncorrelated.
The two story, two bay unbraced frame shown in Fig. 2 (properties given in Table 1) was analyzed using the cyclic procedure to identify the significant failure modes. The means and standard deviations of the loads are: V~ (38.0, 5.7), V2 (20.0, 5), 173 (36.0, 5.4) 1/'4 (20.0, 5.0), and H (7, 1.75). Ma and Ang (1981) estimate that there are over 4,000 kinematically admissible modes when axial force interaction is neglected.
For the case when axial force-moment interaction is ignored, the results are presented in Table 3 showing the results from each cycle of the analysis. The first column of the table lists the cycle number, and the second column lists the mode identified as the best solution to the mathematical program ("best" in the sense that the nonconvex program is solved several times using the starting points detailed earlier--again, the global optimum cannot,
TABLE 1. Member Statistics for Fig. 2
Plastic Moment Capacity Mp (kN. m)
Section (1)
1, 2, 11, 12, 21, 22 5 , 6 , 7
3, 4, 13, 14, 23, 24 8,9, 10
15, 16, 17 18, 19, 20
Ratio of moment to axial capacity
Mp/Np (m) (2)
0.09 0.12 0.09 0.12 0.12 0.12
Mean
(3) 95
203 68
122 203 122
Standard deviation
O"
(4) 14.2 30.5 10.1 18.3 30.5 18.3
234
J. Struct. Eng. 1993.119:223-239.
Dow
nloa
ded
from
asc
elib
rary
.org
by
Ond
okuz
May
is U
nive
rsite
si o
n 11
/07/
14. C
opyr
ight
ASC
E. F
or p
erso
nal u
se o
nly;
all
righ
ts r
eser
ved.

TABLE 2, Member Statistics for Fig. 4
Plastic Moment Capacity Me (kN' m)
Mean Standard deviation Section
(1) 1,2,21, 22 3, 4, 23, 24 5, 6, 25, 26 7, 8, 27, 28
9-17 18, 19, 20
tz (2)
127.2 99.6 65.7 52.0
108.4 61.8
cr
(3)
19.07 14.93 9.85 7.80
16.26 9.28
TABLE 3. Two-Story Example Results: Axial Force Interaction Neglected
Modal probability of failure
Cycle Mode (1) (2)
Combination Beam Beam Beam Sway Beam
3.55 3.20 3.20 1.11 2.97 1.95
System probability of failure
p~ G (3) (4) X 10 -2 3.55 X 10 -2 X 10 -a 6.63 X 10 -2 • 10 -2 9.61 X 10 .2 X 10 -2 10.61 X 10 -2 X 10 _2 12.28 X 10 - 2
x 10 -2 13.10 x 10 -2
Note. Using 6 significant modes:/~I, = 13.20 x 10-2; "Exact": Pl, = 13.50 x 10 -2.
however, be guaranteed). The third column lists the modal probability of failure, and the last column lists the value of the objective function (the second-order lower bound) for this cycle of the analysis. The first portion of the note shows the estimate of the system probability of failure from Monte Carlo simulation using the limit states identified by the cyclic pro- cedure. This is used to compare with the lower-bound estimate using the same number of modes. The second-portion of the note shows the exact system probability of failure for the structure, found by stochastic simula- tion. The estimate of the system probability of failure with the six modes identified by the cyclic procedure is 0.132 and the exact value ofpfs is 0.135. Solution by the cyclic procedure was over an order of magnitude faster than stochastic simulation. The value of the lower bound (0.131) is very close to the value of 0.132 that would have been obtained if the six-dimensional integral had been used as the objective function. Ma and Ang (1981) esti- mated the system probability of failure to be 0.11-0.16, depending on the demarcation correlation used in the probabilistic network evaluation tech- nique (PNET) analysis.
The same structure was reanalyzed, but axial force interaction is now included by assuming that the members have yield surfaces for idealized I sections (m = + n -+ 1). The five identified modes are listed in Table 4. The estimate of the system probability of failure using these five modes is also close to the exact value and is approximately double the estimate when axial force-moment interaction is neglected. Note also that the least-reliable mode was altered when axial force interaction was included.
235
J. Struct. Eng. 1993.119:223-239.
Dow
nloa
ded
from
asc
elib
rary
.org
by
Ond
okuz
May
is U
nive
rsite
si o
n 11
/07/
14. C
opyr
ight
ASC
E. F
or p
erso
nal u
se o
nly;
all
righ
ts r
eser
ved.

TABLE 4. Two-Story Example Results; Idealized I-Beam Yield Surface
Cycle (1)
Mode (2)
Sway Combination Beam Beam Sway
Modal probability of failure
P• (3)
13,24 x 10 -2 10,79 x 10 -2 4.77 • 10 -2 3.62 • 10 -2 1.11 x 10 .2
System probability of failure
(4) 13.24 • 10 -z 18.40 • 10 -2 21.83 • 10 2 24.31 • 10 -z 25.04 • 10 -2
Note. Using 5 significant modes:/~i, = 26.04 • 10-z; "Exact": pp, = 27.20 • 10 2
0.SH
H
H
H
I V4
'I el8 19 20*
6 ' 15 f6 17"-
5. 'e IV2
4 12 f3 14-"
3 l V1
2 9 f0 11
1
r- m7 ~2.29 m--~---2.29 -
28
27
26
25 4 @ 3.66 at
24
23
22
21
FIG. 4. Four-Story Example
T h e one bay, four s tory s t ruc ture shown in Fig. 4 was ana lyzed with the cyclic p r o c e d u r e to ident i fy the signif icant m o d e s w h e n axial force inter- act ion is ignored . T h e p rope r t i e s of the s t ruc ture are l isted in Tab l e 2, wi th s imilar cor re la t ion assumpt ions as T a b l e 1. T h e load means and s tandard devia t ions are: V1, V2, 1,13 (18.76, 2.81), V 4 (9.38, 1.41), and H (0.9, 0.225). T h e four m o d e s iden t i f ied by the cyclic p r o c e d u r e are l is ted in Tab l e 5.
236
J. Struct. Eng. 1993.119:223-239.
Dow
nloa
ded
from
asc
elib
rary
.org
by
Ond
okuz
May
is U
nive
rsite
si o
n 11
/07/
14. C
opyr
ight
ASC
E. F
or p
erso
nal u
se o
nly;
all
righ
ts r
eser
ved.

TABLE 5. Four-Story Unbraced Frame Results
Modal probability of System probability of failure failure
Cycle Mode Pi /~i, (1) (2) (3) (4)
1 Beam 3.18 N 10 -4 3.18 x 10 -4 2 Beam 3.18 x 10 4 5.48 x 10 .4 3 Beam 3.18 x 10 4 6.91 )< 10 .4 4 Beam 0.62 x 10 -4 7.58 x 10 .4
Note. Usin 4 significant modes: Ps, = 7.95 x 10 4; "Exact": Pis = 8.60 x 10 -4.
Once again, the estimate of the system probability of failure using the identified modes is close to the exact value found by simulation.
If this Structure was analyzed deterministically using the mean values of the random variables, the critical mode is a combined failure mode, which is not included in the four found by the stochastic cyclic analysis. This is due to this mode 's low marginal probability of failure (0.793 x 10 -6) and the fact that this combined mode is very highly correlated with the four beam modes identified by the cyclic procedure. Therefore, its incremental contribution to the system probability of failure is negligible.
CONCLUSIONS
The use of stochastic programming techniques in the analysis of structural system reliability was presented. The method provides for the identification of significant failure modes based on their contribution to the system prob- ability of failure for rigid-plastic structures when axial force-moment inter- action is considered. Interaction yield surfaces may have any convex shape.
Stochastic programs were developed to identify significant failure modes in rigid-plastic structures based on their contribution to the system proba- bility of failure. A decision rule forms the basis for mode selection. These stochastic programs are nonconvex. Examples illustrate the use of this tech- nique in the estimation of the system reliability of rigid-plastic frames. In these examples, good estimates of the system-failure probability were ob- tained by identifying only a few modes. Addition of the axial force-moment interaction was found to significantly increase the system probability of failure in the examples considered.
ACKNOWLEDGMENTS
The writers are grateful for the support provided by the National Science Foundation through Grant No. MSM-8814695 (RBC), Grant No. MSM- 9016018 (RBC), and Grant No. CES-8714014 (JHE).
APPENDIX I. REFERENCES
Arnbjerg-Nielsen, T., and Ditlevsen, O. (1990). "Rigid-ideal plastic system relia- bility." Proc., Reliab. and Optim. of struct. Sys. '90, 3rd IFIP W.G. 7.5 Conf., A. Der Kiureghian and P. Thoft-Christensen, eds., Springer-Verlag, Berlin, Ger- many, 13-21.
Baker, J. F., and Heyman, J. (1969). Plastic design of frames 1--Fundamentals. Cambridge University Press, Cambridge, Mass.
237
J. Struct. Eng. 1993.119:223-239.
Dow
nloa
ded
from
asc
elib
rary
.org
by
Ond
okuz
May
is U
nive
rsite
si o
n 11
/07/
14. C
opyr
ight
ASC
E. F
or p
erso
nal u
se o
nly;
all
righ
ts r
eser
ved.

Cohn, M. Z., and Rafay, T. (1974). "Collapse load analysis of frames considering axial forces." J. Engrg. Mech. Div., ASCE, 100(4), 773-794.
Ditlevsen, O., and Bjerager, P. (1986). "Methods of structural system reliability." Struct. Saf., 3/4, 195-229.
Ellis, J. H., Zimmerman, J. J., and Corotis, R. B. (1991). "Stochastic programs for identifying critical structural collapse mechanisms." Appl. Math. Modelling, 15(7), 367-373.
Gorman, M. R. (1981). "Automatic generation of collapse mode equations." J. Struct. Div., ASCE, 107(7), 1350-1354.
Grimmelt, M. J., and Schu611er, G. I. (1982). "Benchmark study on methods to determine collapse failure probabi|ities of redundant structures." Struct. Saf., Vol. 1, 93-106.
Hodge, Philip G. (1959). Plastic analysis of structures. McGraw-Hill, New York, N.Y.
Ma, H. F., and Ang, A. H-S. (1981). "Reliability analysis of redundant ductile structural systems." Civ. Engrg. Studies: Struct. Res. Series No. 494, Univ. of Illinois, Urbana, Ill.
Melchers, R. E., and Tang, L. K. (1984). "Dominant failure modes in stochastic structural systems." Struct. Saf., 2(2), 127-143.
Moses, F. (1974). "Reliability of structural systems." J. Struct. Div., ASCE, 100(9), 1813-1820.
Murtagh, B. A., and Saunders, M. A. (1987). MINOS 5.1 users guide: Technical report SOL 83-20R. System Optimization Lab., Dept. of Operation Res., Stanford Univ., Stanford, Calif.
Nafday, A. M., Corotis, R. B., and Cohon, J. L. (1988a). "Multiparametric limit analysis of frames: Part I - -Model ." J. Engrg. Mech., ASCE, 114(3), 377-386.
Nafday, A. M., Corotis, R. B., and Cohon, J. L. (1988b). "Multiparametric limit analysis of frames: Part II--Computations." J. Engrg. Mech., ASCE, 114(3), 387- 403.
Neal, B. G., and Symonds, P. S. (1952). "The rapid calculation of the plastic collapse load for a framed structure." J. Instn. Civ. Engrs., Part 3, Vol. 1, 58-71.
Nielsen, M. P. (1984). Limit analysis and concrete plasticity. Prentice-Hall, Engle- wood Cliffs, N.J.
Onat, E. T., and Prager, W. (1953). "The influence of axial forces on the collapse loads of frames." Proc., 1st Midwestern Conf. on Solid Mech., Univ. of Illinois, Urbana, I11., 40-42.
Polizzotto, C., and Mazzarella, C. (1979). "Limit Design of Frames with Axial Force--Bending Moment Interaction." J. Struct. Mech., 7(1), 83-106.
Sawczuk, A. (1989). Mechanics and plasticity of structures. John Wiley & Sons, New York, N.Y.
Sim6es, L. M. C. (1990a). "Stochastically dominant modes of frames by mathematical programming." J. Struct. Engrg., ASCE, 116(4), 1040-1060.
Sim6es, L. M. C. (1990b) . "Reliability of portal frames with interacting stress resultants." J. Struct. Engrg., ASCE, 116(12), 3475-3496.
Thoft-Christensen, P., and Murotsu, Y. (1986). Application of structural systems reliability theory. Springer-Verlag, Berlin, Germany.
Zimmerman, J. J. (1991). Analysis of structural system reliability with stochastic programming, PhD thesis, Dept. Civ. Engrg., Johns Hopkins Univ., Baltimore, Md.
Zimmerman, J. J., Corotis, R. B., and Ellis, J. H. (1992). "Collapse mechanism identification using a systems-based objective." Struct. Saf., 11(3), 157-171.
APPENDIX II. NOTATION
The following symbols are used in this paper:
A = cross-sectional area; b~ = paramete r of kth segment of piecewise linear yield surface;
238
J. Struct. Eng. 1993.119:223-239.
Dow
nloa
ded
from
asc
elib
rary
.org
by
Ond
okuz
May
is U
nive
rsite
si o
n 11
/07/
14. C
opyr
ight
ASC
E. F
or p
erso
nal u
se o
nly;
all
righ
ts r
eser
ved.

h m -~
M p N~=
H
ps, =
q
S -~
t~=
Z = A j =
zXs j= 0~ =
X =
X =
number of elementary mechanisms; nondimensional moment; plastic moment capacity; plastic axial capacity; nondimensional axial force; system probability of failure; flow vector; redundancy of structure; number of critical sections; participation factor for ith elementary mechanism; slope of kth segment of piecewise linear yield surface; plastic section modulus, safety margin; axial deformation ofjth hinge; axial deformation of jth hinge in ith elementary mechanism; rotation of jth hinge in ith elementary mechanism; rotation of jth hinge; collapse load factor; yield strength; and nondimensional axial deformation.
239
J. Struct. Eng. 1993.119:223-239.
Dow
nloa
ded
from
asc
elib
rary
.org
by
Ond
okuz
May
is U
nive
rsite
si o
n 11
/07/
14. C
opyr
ight
ASC
E. F
or p
erso
nal u
se o
nly;
all
righ
ts r
eser
ved.