Embed Size (px)
Citation preview

lishes the definition of the term "steadystate."
33. Synchronous Machine RegulatingSystem Transient Performance. The term"transient performance" has been de-fined in many ways by various industrygroups. The subject definition is aresult of a review of these. Furtheraction by various industry groups mayresult in one accepted definition. Mean-while, the subject definition appears to bebest suited for the synchronous machinesand associated excitation systems.
34. Synchronous Machine RegulatingSystem Accuracy. In the industrythe term "accuracy" has had manydefinitions. It is a general term ap-plicable to many types of systems. Thesubject definition may be changed if anindustry-wide definition is established.Included in the definition are conditionsthat can be measured. All others of arandom nature are included under defini-tion 36, "Drift."
35. Ideal Value is a general term thatmay be defined by other industry groups.Various definitions have been reviewedand the subject one is a compromiseto best suit synchronous machine regu-lating systems.
36. Drift is considered a long timechange due to conditions that cannot bemeasured as can be done for conditionsestablishing "accuracy. "
37. Load-Band of Regulated Voltageis a term that has been used by the power
generation industry and is continuedhere. It is one condition of synchronousmachine regulating system accuracy(definition 34).
38. Rated-Load Field Voltage belongsunder synchronous machines and otherelectric machines but the term is usedwith other synchronous machine regu-lating system definitions and is there-fore included here. If the term is to bedefined by other industry groups, it maybe omitted here.
39. No-Load Field Voltage is a defini-tion similar to "Rated-Load Field Volt-age" and is also used with other syn-chronous machine regulating machinedefinitions. If this definition is estab-lished by other industry groups, it maybe omitted here.
40. The term Adjuster is a generalterm and is almost self-descriptive. Itserves as an introduction to more specificterms.
41. Synchronous Machine Voltage Reg-ulator Adjuster. Although this seemsspecific and clear, certain restrictionsapply. If limiter (definition 43) actionis occurring, the adjuster may not becapable of modifying the synchronousmachine voltage.
42. Limit. To permit definitions oflimiters, the general description of a limitis introduced.
43. A Limiter may take various forms.It may simply restrict action of a syn-chronous machine regulator, or it may
itself be a type of synchronous machineregulator.
44. A Compensator is a general termto permit the more specific definitions45 and 46.
45. Reactive Current Compensator.Historically, terms such as "equalizingreactor," "cross-current compensator,"and "line-drop compensator," have beenused to describe the function of a reactivecurrent compensator.
46. An Active Current Compensator issi.milar to definition 45 except that activecurrent is considered.
References
1. ROTATING MACHINERY (Group 10). C42.10-1957, American Standards Associationt, Inc.,New York, N. Y., 1957.
2. PROPOSBD STANDARD, LETTER SYMBOLS FORFEBDBACK CONTROL SYSTEMS. Y-10 (ASME),American Standards Association, Inc., July 1955(to be published).3. SYMBOLS AND TERMINOLOGY FOR AUToMATICCONTROL SYSTEMS. Electrical Manufacturing, NewYork, N. Y., July 1957, pp. 149-51, 290.
4. APPROACH TO THE DEFINITION OF EXCITATIONSYSTEM RESPONSE, T. J. Bliss. AIER Trans-actions, pt. III (Power Apparatus and Systems)vol. 74, Oct. 1955, pp. 1008-13.5. FIELD TESTS OF RESPONSE OF EXCITATIONSYSTBM FOR A SYNCHRONOUS CON{DEN8BR, AxelN. Eliasen. Ibid., vol. 75, Aug. 1956, pp. 577-82.
6. EXCITATION VOLTAGE RESPONSE DEFINITIONSAND SIGNIFICANCED IN POWER SYSTEMS, M. Temo-shok, F. S. Rothe. Ibid. (Feb. 1957 section), pp.1491-96.
7. EXCITATION SYSTEM RESPONSE: UTLITYVIEWPOINT, P. L. Dandeno, K. R. McClymont.Ibid., pp. 1497-1501.8. TRANSIENT PERFORMANCE OF EXCITATIONSYSTEMS, R. L. Krahn. Ibid., vol. 77, June 1958,pp. 210-14.
Synchronizing and Damping Torque
Coefficients of Synchronous Machines
R. V. SHEPHERDFELLOW AIEE
ONE of the most common industrialapplications of synchronous ma-
chines is their use with reciprocatingequipment such as motor-driven com-pressor drives and diesel engine generatorsets. While the cyclically varying torquecharacteristics of such reciprocating ma-chinery always cause some steady-statecurrent and power pulsations in the powerline of the connected electric machine,methods of predetermining performanceof such equipment, to insure that thesepower or current pulsations are not ex-cessive, are well known. 1-3 The elec-
trical characteristics of the synchronousmachine most pertinent to these calcula-tions, as well as to transient stabilitycalculations, are the synchronizing torquecoefficient T, and damping torque co-efficient Td.These coefficients are modified when
the machine is operated with tie-lineimpedance, and these circumstances can,in extreme cases, cause abnormal steady-state or unstable transient performance.A recent case of unstable operation of
a diesel-generator set led to a joint in-vestigation of system performance by the
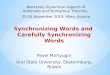
generator, engine, and governor manu-facturers. Details of that investigation,reported in an American Society ofMechanical Engineers (ASME) paper, ref-erence 4, are briefly summarized in Fig. 1,which shows that when the generator was
operating in parallel with an unusuallyhigh reactance tie line, the positive damp-ing torque coefficient of the generator wasreduced sufficiently so that the totaldamping coefficient of the engine-genera-tor-governor system when operating on
gas fuel, became negative, causing in-stability. While such a combination of
Paper 61-144, recommended by the AIRE RotatingMachinery Committee and approved by the ATEETechnical Operations Department for presentationat the AIEE Winter General Meeting, New York,N. Y., January 29-February 3, 1961. Manuscriptsubmitted October 31, 1960; made available forprinting December 20, 1960.
R. V. SHEPEBRD is with the General Electric Com-pany, Schenectady, N. Y.The author gratefully acknowledges the helpfulcomments, suggestions, and assistance of his col-leagues, particularly F. S. Rothe, C. Concordia,M. N. Halberg, C. L. Strunk, and J. P. Franz.
Shephe rd- Torque Coefficients of Synchronous Machines JUNE 196 1180

Td
Fig. 1. Variation of damping torque co-efficient Td with pulsation frequency of com-
bined governor-engine-generator system
factors which would cause instabilityoccurs very infrequently in practice, itis desirable to establish some criteriaby which such special cases may bepredetermined.Methods of calculating the synchro-
nizing and damping torque coefficients(T8 and Td) and the variations of thesecoefficients for various operational condi-tions have been given.5'- The implicitresults previously presented have tendedto mask the relative contribution of themachine parameters for those conditionsinvolving pulsating shaft torques at lowpulsation frequencies.
This paper presents a method of cal-culating these coefficients by which thecontribution of each rotor winding toboth T, and Td may be independently andexplicitly determined in terms of theconstants associated with each windingin each axis for pulsation frequencies nor-mally encountered. The results arerelatively siuple in form and make itpossible to determine some rational ap-
e-_
V-e-4 V- 1.0
(A)
t e
x e
G
(a) (C)
proximations of interest. A new equa-tion for Pr is given. Approximatemethods of determining effect of systemconditions and recognition of "special"cases are presented.
General
It will be convenient to describe theperformance of the electric machine in theusual per-unit (pu) quantities. Equa-tions showing the relation between per-tinent quantities in this and in otherunits are given in the Nomenclature,Appendix I.The electrical torque T,(jS) of a syn-
chronous machine, in synchronism, at aparticular condition of operation andsubject to pulsating shaft torque of fre-quency s pu may be written,
.TeTO(s)= AT = Ts+jsTd (1)
The values of Ts and Td are not con-stants but vary with load conditions,pulsation frequency, magnitude, and otherfactors. Values of these coefficients inpu or other equivalent terms are alwaysexpressed for rated voltage and infinitebus conditions unless otherwise stated.The synchronizing torque factor used
by the industry, called PT, can be definedas the rate of change in kilowatts of elec-tric power input (or output) of themotor (or generator) per electrical radianof displacement of load angle. The value
2 -_
4.0
Fig. 2 (left).Electric system
conditions _X
M.60
Fig. 3 (right). fi4OFunctionsdeRnedby equations 25 .20and 26 applying
SHN to generator no. .10LOAD I whose con- Da
rlJA/v11 stants are: Xd= .0_ 1.40 pu; Xd'=
- .8-J.6 0.373 pu1 Xd'==.8-j.6 0.218 pu; Xq=I
0.794pul X,'= .02-0.245 pu; Td =368 radians; .01 /iird' = 4.9 radians; LO .8 .6*rq=6.45 radians
of P, is proportional to T, in the followingway:
Pr= k, (kva)X Ts, shaft kw/electrical radian(2)
where
(kva)=rated kilovolt-amperes of themachine
k== a factor proportional to full loadefficiency ,, to account approximatelyfor losses in the machine
=1 /s, for generators under load-,q, for motors- 1, for motor or generator at no load
SCOPEThe analysis herein applies to either
synchronous motors or generators.Since large values of external tie-line
reactance or system elements whichmight contribute negative damping rarely,if ever, occur in motor applications, thispaper is primarily directed to the case ofspeed-governed prime mover-generatorsystems where it is possible, althoughnot usual, for either or both of these condi-tions to exist. Therefore, all data applyto generators, specifically to the diesel-engine-driven type of generators, unlessotherwise noted.The coefficients T, and Td are of inter-
est at the natural frequency of oscilla-tion of the system which will normally bein the range of about 1 to 4 cps (cyclesper second). A value of 1.8 cps is takenas typical, corresponding to so= 0.03 pu.
Typical variations in T, and Td as a
S, PER UNIT PULSATION FREQUENCY
Shepherd-Torque Coefficients of Synchronous Machines
e
JUNE, 196 1 181

CA
2o T W^MANTANED
I O _ _ - ~~~~~M AINTAINED
0 0.2 0.4 0.6 0.8 1.0
KW LOAD, PER UNIT
Fig. 4. Effect of field contribution to syn-chronizing torque coefficient T. for generatorno. 1. Solid curves: T. corresponding toequation 6, Dashed curves: T corresponding
to equation 3
0 0.02 0.04 0.06 0.08 0 10
S P.U.
Fig. 5. Magnitude of amortiseur contribu-tion to T1 for generator no. 1. Solid curveswith connected end rings, dashed curves with
nonconnected end rings
0 .02 .04 .06 .08 .10
S PU
Fig. 6. Amortiseur contribution to T. forseveral amortisseur windings having differentrelative resistance and reactance values
(rated load conditions)
Ratio of Amortisseur Resistance or Redctanceto That of Generator no. 1
Resist- React-Curve ance ance Segments
1 ...... 1. 4. closed2 (generator......1 .1 closed
no. 1)3 ...... 1. 1. open4 ...... 4. 4. closed5 ...... 4..1 closed
function of important parameters areshown, and those cases with tie-lineimpedance are considered from the view-point of maintaining rated generatorterminal conditions and letting the in-finite bus voltage vary to suit.
ASSUMPrIONSThe following assumptions may be
made.
1. Machine armature circuit resistance(including tie-line resistance) is zero. Themachine armature resistance is of the orderof 4d1% and is negligible in any practicalcase. The effect of this assumption (re=O)with respect to line resistance external tothe machine is discussed.2. Saturation is neglected.3. The machine field circutit resistance rfis very much less than the equivalentamortisseur resistance rid. The amortis-seur time constant Td' is very much lessthan the field time constant Td'.4. Torque pulsation is periodic and angulardeviation is not large.
Synchronizing Torque Coefficient
ZERO PULSATION FREQUENCY (s =0)
Neglecting armature circuit resistance,and with no external line impedance, thederivative of the power-angle equation ofa synchronous machine operating insynchronism on an infinite bus (Fig. 2(A))is given by equation 19, where TJo is thesynchronizing coefficient T, for the specialcondition of zero pulsation frequency.Values of Ed, e, 8, corresponding to full-load conditions, determine the full loadTsO.
In practice, a somewhat higher value,corresponding to the secant to the power-angle curve (through zero and full-loadangle 8) has been used, called the con-ventional value, given by:
Conventional full-load Pr= (kva)(coso)so
shaft kw/electrical radian (3)
where all factors of this equation are thoseexisting at rated conditions.When Ed = e and 8 = 0 which corre-
sponds to no-load and 1.0-pf (powerfactor) operation, equation 19 gives T,o=e2/Xq, and the no-load Pr at rated voltsis, therefore:
No-load P' X ) shaft kw/electrical
radian (4)
Equations 3 and 4 give the conventionalmaximum and minimum values of P, usedto detennine the maximum and minimumvalues of natural frequency of oscilla-tion at rated voltage for any condition of
load between no-load 1.0-pf operation,and full-load operation at rated powerfactor.
PULSATION FREQUENCY, S
Neglecting armature circuit resistanceand with no external line impedance(Fig. 2(A)), the value of T. at pulsationfrequency s against an infinite bus voltageis showin in Appendix II to be given by:
Ts = T3o+(a,d+akd)e2 sin2 8o+akqt2 cos 28o(5)
where T3o is given by equation 19 andthe functions aid, am, and akq, are de-fined by equation 26. These functionsare shown in Fig. 3 for a particular gen-erator whose constants are given.The aid, akd, and ak8 terms represent
the contribution of the field winding, d-axis amortisseur, and q-axis amortisseurwinding, respectively, to the synchro-nizing torque coefficient T.. As shown inAppendix II, the afd term reaches itsmaximum value at very small values ofpulsation frequency (of the order of s=0.01) so that if any pulsation exists, theard term in any usual case may be takenas (Xd-Xd')/XdXd'.
Neglecting for the moment the contribu-tion of the amortisseur winding, the valueof T. under load will not be less than
T,=- cos o+ed2 d Cos 2 8o+Xd XdXf
Xd-Xd'0 XdXd' sin So (6)
The solid curves of Fig. 4 show T, byequation 6 as a function of load for an0.8-pf rated generator operating at aconstant pf of 0.8, and the same generatoroperating at a constant pf of 1.0. Thedashed curves correspond to the con-ventional T, by equation 3. For thismachine, the T. by equation 6 is 51/2%higher than the conventional valueat rated kva 0.8 pf and 211/20,% higherthan the conventional value at ratedkva 1.0 pf. The increase in the lattercase is due to the larger field (aid)contribution at the increased operatingload angle. (The increase in T. at 1.0-pfoperation is significant only in the caseof a machine designed and rated for 1.0 pfoperation, i.e., such as on 1.0-pf ratedmotors.) It can be shown that for ma-chines rated 0.8 pf, the equation 6 valueof T, at rated voltage, rated line current,0.8-pf operation will always be greaterthan that obtained at rated voltage, ratedline current, 1.0-pf operation, providedXd'/Xq>0.32 for any X_. 1.0. Thiscondition obtains in any practical case.The amortisseur winding contribution
to T. is represented by the akd and akt
Shepherd-Torque Coefficients of Synchronous Machines182 JUNE 1961

Fig. 7. Vector diagramof generator with tie-line impedance re+jX,
C~~~~~~~e
08 0 -00. 0
0 _ __0.203: 3: ~~~0.30
-0.6 0.40
042
02
0 02 0.4 06
Xe PER UNII
Fig. 8. T. versus r. and X. for geneoperating at rated load, 0.8 pis V2(B) For s =0.03. T. 2.175 for
Xe*
X0.
*0.8
0-
terms of equation 5. Adding these toequation 6 gives:
T, TT+e2 d Xd sin2 bo+XdXd'e'(akd) sin' 4o+e'(aki) COs2 60 (7)
Fig. 5 shows the factor by which the T.of equation 6 must be increased to in-clude the amortisseur contribution givenin equation 7 at rated line voltage andcurrent conditions. It can be seen thatthe increase in T,, due to the amortisseur,is about twice as great for a given valueof s, for the generator having closedamortissuer segments (solid curves) asfor the same generator except with openamortisseur segments (dashed curves).It will be shown later that the dampingtorque coefficients are also in approxi-mately the same ratio.
Fig. 6 shows the effect of relative valuesof amortisseur reactance and resistanceon its contribution to T,. In this figure,curves 2 and 3 are replotted from Fig. 5.Curves 4 and 5 are shown to representamortisseur constants typical for a motorwith special starting requirements.
WVITH TIE-LINE IMPEDANCE, ATPULSATION FREQUENCY, S
The foregoing considers the machineoperating against an infinite bus as inFig. 2(A). With line impedance externalto the generator, Fig. 2(B), and with ratedgenerator terminal voltage maintained atV= 1.0, the infinite bus voltage e will bedifferent from 1.0 and will vary depend-ing on line impedance and load conditions.Fig. 7 shows the vector diagram for thiscondition.
Fig. 8 shows generator T, at rated load0.8 pf with tie-line impedance, Fig. 2(B),expressed as a fraction of T. for operationat the same condition with no line im-
0.8 I. pedance, both conditions being calculatedT by equation 15. (The range of X, and r,ato no 1 shown greatly exceed values met in prac-
.fw.%Fp .._. .
=1.0, Fig.r.=XG=O
0.0
10.0
0.20_
I0.40
0.60
0 0.2 0.4 0. 6
PER UNIT OF RATEO CURRENT
tice.) It will be noted that if r. _ 0.05, orif rc. 1/4 Xc the value of TJ is essentiallyindependent of r,.
While these curves apply to a partic-ular generator, it is believed that thecriterion r, . 0.05 or r, < 1/4 X, should begenerally applicable in any usual case(for small values of s), and will be usedin this paper as the criterion for neglectingresistance. When this criterion is met,equations developed in Appendix IIfor zero resistance are directly applicable.
Fig. 9 shows the ratio of T,, with andwithout external line impedance, as afunction of rated current. It is ofacademlic interest in that it shows thatit would be possible to have a full loadT, less than the no-load T. for the ex-treme conditions shown.
It should be noted that Figs. 8 and 9 arebased on a constant pulsation frequencyof s=0.03 pu, whereas in practice, so willvary with T,. Since the amortisseurcontribution is not large at the smallvalues of s being considered, this effectis not very significant for usual values ofXe.As an approximation to the value of T,,
its value by equation 31 (but neglectingamortisseur components), for variousvalues of X. and expressed as a ratio ofT, for X,=0, is shown in Fig. 10. Al-though these curves neglect the contribu-tion of the anortisseur winding, the ratiois not significantly changed by in-cluding amortisseur effects for usual valuesof s where these contributions are rela-tively small. Curves of Fig. 10 are cal-culated for Xd'/X =0.5 and are not sub-ject to appreciable variation for values of0.4 and 0.6. These curves therefore showthe essential variation of T, with linereactance for values of X, not exceedingthe limit line, to be described later.The case of a generator connected to a
tie line and also supplying shunt loadoff the station bus, Fig. 2(C) can be
10 V F
Fig. 9 (leFt). T. versus linecurrent versus X8 for systemcondition Fig. 2(B). Dataapply to generator no. I
maintaining constant: re/Xe =1 /4, V=1.0, pf=0.80,
s = 0.03
~0*x
x x
Cm-
A
1: 1
2
!i
Fig. 10 (right). ju versus X. andXq For salient pole generatorrated 0.8 pi, For r.= ndXd'/Xq=0.51 for load con-
0 ditions: V-1.0, i1= 1.0,pf= 0.801 Fig. 2(B)
LIMIT UNE PER FIG. 4
0.6 I__
0.2
v~~~~~~~~N
0 .10 .20 .30 .40 .50 .60
X & p
Shepherd-Torque Coefficients of Synchronous Machines
I0.0
183JUN,E 1961

16
\''\X'__ d
O0 0.02 Q04 0.06 0.08 OJ0
S Pu
Fig. 11. Components of Td versus pulsationFrequency at operating angle 5, solid curvesfor a= 20 degrees (approximate rated kva0.8 p%)j dashed curves for 6=40 degrees
(approximate rated kva at 1.0 pf)
f=field-winding componentd =d-axis dmortisseur componentq = q-axis amortisseur componentTd = f+d+q
tranformed into an equivalent system,Fig. 2(B), as shown in Appendix II.
In any usual case involving a tie line,the range of T, which may exist is: (1) themaximum value corresponding to therated load, infinite bus voltage value (ifgenerator can be operated with tie lineopen), and (2) the minimum value corre-sponding to the rated voltage, 1.0-pf no-load value given by l/(Xc+Xe).
Damping Torque Coefficient
Damping torque can be defined as thetorque proportional to the relativevelocity (s) in pu between rotor and statormagnetic field, and is equal to sTd, whereTd is the damping torque coefficient.When s=0, then sTd==0, but Td at s=Ohas a specific value. The following willdescribe the generator characteristic interms of the damping torque coefficientTd. It was noted in the ASME paper,reference 4, that in the engine-gover-nor-generator stability study, the criterionfor over-all system stability is that thealgebraic sum of the engine-governordamping torque coefficient, and the gen-erator damping torque coefficient, mustbe a positive number.
It is shown in Appendix II that a syn-chronous machine with zero for both arma-ture circuit resistance and tie-line react-
ance and connected to an infinite bus e,will develop a damping torque coefficientgiven by:
Td =e'(bkq) cos' bo+e'(brd+±bkd) sin' 5o (8)
where the functions bfd, bkd, and bkq aredefined in equation 26.These functions are shown in Fig. 3
for a particular generator. The bfd,bkd, and bk2 terms of equation 8 representthe contribution of the field winding,the d-axis and q-axis amortisseur windingrespectively, to the total damping torquecoefficient.
Fig. 11 shows the Ta and the compo-nents thereof for the generator whosecharacteristics are shown in Fig. 3.Curves shown are for operation at loadangie of 20 and 40 degrees which closelycorrespond to full-load 0.8-pf and full-load 1.0-pf operation for this generator.The variation of these components withs and with a is illustrated in this figure.
In general, the damping coefficientcontributed by the field winding will besmall at usual pulsation frequencies of s-0.03 or more, in comparison with theamortisseur contribution. If the bfdcomponent is neglected, the dampingtorque coefficient of a machine equippedwith an amortisseur will be as shown inequations 9:
Td>e2bkq COS2 So+e'bkd sins 6o
.2 {bk+bkd+bkq-bkd os2 S (9)
Fig. 12 shows the effect of relativevalues of amortisseur resistance and re-actance calculatedaccording to equation 9.Curve 2 of Fig. 12 shows the Td of thissame generator calculated by equation 9,for rated load 0.8-pf operation, as a func-tion of pulsation frequency. Curve 3 ofFig. 12 is the same except with open-endring construction, and this gives about onehalf the damping coefficient of the closed-end ring construction, as was the case alsowith T, as shown in Fig. 6. (Numberedcurves of Fig. 12 correspond with thoseof Fig. 6.) As mentioned for Fig. 6,curves 4 and 5 might be typical of a motorwith special starting torque require-ments.The values of Td shown in these curves
can be correlated with the value used inthe literature'-' which gives the ratioTdm/Tsm = 0.010 as average, with a rangeof 0.005 to 0.015. Since Td/T, = 2wrfTdm/Tsm, then Td/T8'377 Tdm/Tsm for60-cycle machines. A value of T, of,say 2'/2, gives a value of Td=8 to 10corresponding to a ratio of TdI/T,m-0.010.
In general, a value of Td=8 to 10 ap-pears to be a boundary value, that is, it
0 .0 2 .04 .06 .08 .10
S PU
Fig. 12. Amortiseur contribution to Td Forseveral amortisseur windings having differentrelative resistance and reactance values1 see
Fig. 6 For legend
04
'..
XX* S
-0
-0.2L
Fig. 1 3. Td vesus r. and X. for generator no. Ioperating at rated load, 0.8 pf, V = 1.0,Fig. 2(B), for s= 0.03. Td= 1 7.1 5 for re=
XO=O
tends to be the upper value of the rangeof Td (2 to 10) for motors and the lowervalue of the range of Td(8 to 20, or more)for generators. These values are for s =0.Individual machines may differ fromthese values.As the preceding shows, the value of
Td varies with load angle and pulsationfrequency, both of which are in turn de-pendent on load, power factor, etc. Sincea does not usually exceed 45 degrees forany normal condition of operation, it willbe convenient to define Td(46) as the valueof Td for 45-degree load angle for ratedvoltage infinite bus conditions.
WITH TIE L NJEThe foregoing considers the machine
operating against an infinite bus; Fig.2(A). Now consider operation with tie-line impedance, with generator terminalvolts maintained at V= 1.0, Fig. 2(B), forall the assumed generator load conditions.
Fig. 13 shows generator Td at rated load0.8 pf for these conditions, expressed as afraction of Td for operation at the sameconditions, except with zero tie-line
Shepherd-Torque Coefficients of Synchronous Machines184 JUNrE 1961

Fig. 14 (left). X. versus X, For8=45 degrees; for rated cur-rent and rated volts at generator
terminals
Fig. 15 (below left). Varia-tion of Td with X. and Xq,equation 10. Variation of e2
0.8 10° versus X. with V=1.0. Bothcurves for rated load 0.8 pf,conditions as in Fig. 2(B) with
r. O
impedance, both values of Td being cal-culated by equation 15. As previouslynoted, the range of re and Xe greatly ex-
ceeds that met in practice.For this case, if re < 0.05 pu,or if re 1/4
Xc, the value of Td is not sensibly differentfrom that for r =0.
As indicated for T', it is believed thatthese values also provide, with respectto Td, a reasonable criterion as to when remay be neglected, provided the machineis equipped with an effective amortisseurwinding. In this case, the equationsof Appendix II apply.At constant generator power factor and
terminal volts, with tie-line reactance,the value of Td increases with decreas-ing load due to the effective increase ininfinite bus voltage, e.
Fig. 14 shows graphically the relationbetween Xc and XQ to maintain a=45degrees for rated generator terminal condi-tions at 1.0-pf or 0.8-pf operation. Theload angle of a machine with any
value of Xe less than that shown by thecurve (for a given XQ) will be less than45 degrees.
While values of Xe corresponding tothe 0.8-pf curve will result in values of 3
larger than 45 degrees for 1.0-pf operation,the value of Td for such operation will begreater than that obtained for the same
X6 at 0.8-pf operation because of a sub-stantially lower iXe drop in the tie line.Thus, the 0.8-pf curve is the criterion formaximum value of X, versus X,, foruse with the Td(45) term previously defined.
I--z
0-
Fig. 16(right). Tdversus Xe, aand s for generator no. 1 for 4full-load conditions; Fig. 2(B)
0.8 Curve-Td correspondingto a for 0.8-pf operation
1.0 Curve-Td correspondingto a for 1.0-pf operation
45-Degree curve-Td corre- csponding to constant 8=45
degrees
If the field-winding contributioineglected, as before, then equatiorgives 7d for operation with a tie-line rance Xe, Fig. 2(B), with re=O. Ms=0, this equation reduces to ecalent forms noted elsewhere."3
Approximations
DAMPING TORQUE COEFFICIENT
Normally, there will not be a largeference in the subtransient saliencymoreover, the inclusion of tie-line rEance Xe further reduces this differcUsing the geometric mean as an appimation to the average value of theof the contribution in each axis, then:
Td((4a)] x_,°,_2 _Xe __d_Td(46)lO0o0 kX+Xe / Xd'+XeI
The subscripts on the Td(45) factoIdicate the tie-line reactance and puls:frequency condition. For example,
Td(45)] X,o= Td(45) for X, = x and s = 0
Td(45)l0,0= Td(4b) for Xc = 0 and s = 0
The variation of
Td(46)]Z,o
with s is closely given, for values ofthe region under discussion, by a fact
1
0 .02 .04 .06 .08 .10
S PER UNIT
which, combined with equation 10, gives,finally, the variation of Td(45) with X and
Td(46)]zsX,Xc Xd _X
Td(45)10]0 \XQ+Xe \Xd'+Xe/
1
1 (Xasl-Tq')I(12)
where
and, 5~~~1+Xe ) +( )(d (3
dif. - Xd- Tand, x
+ e Tq
!act- 1+ Xd' \Xe
oxi- TS(with X= Xe) (13A)sum
AT8(with X6= 0)
If so= the actual undamped naturalfrequency of the generator T, against the
(10) system WK2 for the actual conditions ofoperations, let si=so for the actual con-
s in- dition of rated generator load for infiniteLtion bus conditions, Fig. 2(A). Thus, si is
the highest nominal value of so for a givenmachine operating alone against a ratedvoltage infinite bus.
Also, lus, =so for the condition of ratedgenerator load (V= 1.0) with tie-linereactance Xe, Fig. 2(B). Thus ,u is thefactor by which si is reduced by a change
s inin T, due to X,.
Dr, lAnd, finally, N,uss =an equivalent pulsa-tion frequency which includes the effectof system reactances on generator time
(11) constants. It is therefore the "apparent"
Shepherd- Torque Coefficients of Synchronous Machines
0.4 0 6
Xq PU
0 oa
ati0~o
o c4
02 03
Xe p.M.
JUNEF 1961 185

pulsation frequency seen by the generatorcorresponding to the actual pulsation fre-quency, us,.
Values of Xju for maximum Xe condi-tions of Fig. 14 are of the order of 1+. Itappears that a value of XIu= 1.5 would beconservative for the range of machinesconstants normally encountered if it isdesired to include this correction.The value of equation 10 is shown
plotted in Fig. 15 for rated current, rated0.8 pf, rated voltage (V= 1.0) condi-tions as a function of X. and Xq based ona value of Xd'/X0=O.5. The curves arenot substantially affected by values ofXd'/Xd ratio between 0.4 and 0.6. Thecurves include the factor e2, and also aseparate curve of e2 alone, for 0.8-pf loadconditions which give the greatest reduc-tion factor. The only effect load (or pf)has on these curves is the effect on the e2term. Hence, the no-load (e= 1.0, X,=Xs, s=0) value of Td will not be lessthan the full-load value obtained fromFig. 15, multiplied by the factor 1/e2,where the value of e2 is also shown in thefigure.
Fig. 16 shows the value of Td cal-culated by equation 32 for rated generatorterminal conditions of V= 1.0, pf=0.8(and 1.0) calculated for the actual loadangle existing at each specific conditionof load; and also calculated for a fixedvalue of a=45 degrees at each valueof Xe It will be noted that for a smallvalue of X,, the 0.8-pf value of Tdexceeds the 1.O-pf value but that this con-dition reverses as X. increases. Bothvalues approach Td(45) as X, increases andthe 0.8-pf value will equal the 45-degreevalue for X,= 0.38 determined from Fig.14.For comparison, the results of the
approximate method given above areshown by the circled values in Fig. 16.These approximate values were calculatedfrom the Td(46) 10,0 value shown on thiscurve, modified by the factor shown inFig. 15 to include the effect of X, at s=0.This result is then further modified byequation 11 (,u= 1.25) to obtain variationwith s for the points shown.
Conditions involving a shunt load, Fig.2(C), can be considered in terms of anequivalent system of Fig. 2(B) as shownin Appendix II.
Kilgore9 has suggested a method ofaccounting approximately for the reduc-tion in dampingtorque causedby armaturecircuit resistance. This reduction willusually not be large in magnitude for usualrC/x, values and is not usually importantexcept possibly for an otherwise marginalcase.
While a number of assumptions havebeen made in arriving at the approxima-
tion given, these assumptions have beentoward making the results generallyconservative and establishing a basis fordetermining when a more detailed investi-gation should be made, i.e., to distinguishthe "special" cases.
In summary, by knowing generatorvalues of Td(45) 1o0o and riv for X,= 0, ratedvoltage conditions (and assuming X, =1.50), one may closely approximate thevalue of Ta(45) ]Z,8 conditions for values ofXc not exceeding those given in Fig. 14and for values of So normally encountered.Should such procedure indicate a stabilityproblem might exist, then a study of thedetailed characteristics of all elements ofthe system for the actual operating condi-tions to be encountered would be in-dicated.
SYNCHRONIZING TORQUE COEFFICIENT
As shown earlier, if pulsation exists,the lowest value of T, will bby equation 6.
For rated voltage infinilditions one may closelythe amortisseur contributiotadding to the value of eqamount:
A S2Tq [ Td(0)oI 0,1+ (5Sr )2
(kva)s2r'[ Td(46)]o,g1+(sI)2 * kw/el
This result follows imme4the fact that the increase in storque due to the amortissetrelated to the damping toapproximate s2ir factor.Thus, having P, values corn
equation 6 (and with theformation Tra and Td(45) ].cdamping torque values), the idue to amortisseur may be ix:determined at any value ofrange under consideration ifments are indicated.
Results and Conclusions
1. Equations have beencalculation of T, and Td asdthe important parameters afcoefficients (for the case of acuit resistance equals zero).
2. Simple rational ap:have been derived by whichT8 and Td with external tie-limay be investigated to det(special cases for which manalysis may be required.
3. It is slhown generall3TI and Td are directly re]
machine reactances, which are largelydependent upon a "physical size/electricalrating" factor. In detail, one may con-clude:
(a). The maximum amortisseur contribu-tion to Tl and to sld is directly proportionalto the same reactance factor and is inde-pendent of amortisseur resistance. Themaximum value of sTd (with respect to s)is determined by the winding resistance(time constant).
(b). For diesel-engine generators havingso values in the range s<0.10 pu, the mostfavorable amortisseur will normally be alow reactance, low resistance with con-nected segments between poles.
4. In general, engine-driven generatorsequipped with amortisseur windings al-ways provide positive damping torquecoefficients and normally provide Tdvalues (at s=O) of the order of 10 to20 pu or more, depending upon de-sign.
e that given It is concluded that any case of tran-sient instability occurring in such drives,
te bus con- occurring at the undamped natural fre-approximate quencies (so) normally encountered forn to T8 by such equipment, are either caused by:uation 6 an (a) the presence of other elements in
the system which have large negativedamping torque coefficients, or (b) sys-tem conditions external to the generator(such as high line reactances) which effec-tively reduce the generator T8 and Td co-
lectrical efficients, or (c) a combination of both
radian (14) these factors.5. A more nearly correct value of P,
diately from is that based on T. calculated by equa-ynchronizing tion 6 which includes the contribution ofir is directly the field winding. The conventionalrque by an value of Pr (equation 3) is generally some-
what lower than this for 0.8-pf ratingsresponding to (5% in the case illustrated) and sub-addition in- stantially lower (20% in the case illus-
D needed for trated) for 1.0-pf ratings. This is partic-increase in P, ularly significant in the case of 1.0-pfidependently motors.s within the Therefore, values of Pr should be pro-such refine- vided on the basis of equation 6 with addi-
tional data as described by equation 14, toallow inclusion of amortisseur effect, ifdesired.
6. Except as provided for in item 5,derived for the results in this paper are not partic-
a function of ularly significant with respect to motorsfecting these for reciprocating drives, since Td valuesLrmature cir- are implicitly determined by starting
torque and current requirements whichproximations are directly influenced by line reactancevariation in values.
ine reactance In general, it can be said that theermine those values of Tdm/T,m are of the order ofiore detailed 0.005 at rpm pulsation frequency as
has been the practice,'-3 and the con-
y, that both tribution of the amortisseur to T, is ac-
lated to the cordingly small.
Shepherd-Torque Coefficients of Synchronous Machines JUNE, 1961186

Appendix 1. NomenclatureEd= direct axis unsaturated excitation
voltage, pu
e=infinite bus voltage, pu
i=generator line current, puV=generator terminal volts, puPr= synchronizing coefficient, kw/electrical
radianb= generator load angle (the angle between
Ed and e), electrical radiansbo=average operating load angle, electrical
radiansAb variation in a about 6oe pf angle between i and e
s=pulsation frequency, pu (s=F/f)so=actual undamped natural frequency of
oscillation of a single generatorengine for actual system condition
F=pulsation frequency, cps
Fo =fso = (35,20O VfP,/WK2)/60N
=f'VPr/47rfH(kva), cps
f=rated electrical frequency, cps
TdO, 7dl=open circuit, short-circuit timeconstant of field winding, electricalradians
Tdo', d' = open circuit, short-circuit timeconstant of d-axis amortisseur, elec-trical radians
iqo", Tqt=open circuit, short-circuit timeconstant of q-axis amortisseur, elec-trical radians
Xd, Xg =direct axis, quadrature axis syn-
chronous reactance, puXd', Xq'-direct axis, quadrature axis
transient reactance, pu
Xd4, Xq'=direct axis, quadrature axissubtransient reactance, pu
ad: aq = see equation 25akd, aek* = see equation 26
bkd, bk ..Ta = synchronizing torque coefficient, puTS, synchronizing torque coefficient, for
s=0, puTsm = synchronizing torque coefficient, foot-
pounds/mechanical radian=3,520 (kva)PTs/N
T=torque, pu (unit torque = torque atrated kva and 1.0 pf)
Te(js)-electrical torque at s pulsationfrequency= Ts+jsTd, pu
Td =damping torque coefficient, pu torque/pu pulsation frequency
Td(*) Td for 8=45 degreesTd(4) = aTd for 6 =45 degrees and for:
a = system reactance conditionx = with tie-line reactance0= with zero tie-line reactance
,= pulsation frequency conditions-at pulsation frequency s0=at zero pulsation frequency
sTd=damping torque, puTdm =damping torque coefficient, foot-
pounds/mechanical radian/second= 3,520 (kva)PTd/2lrfN
H=0.231(N)2WK2/106 kva, secondsWK2 = total equivalent WK2 of rotating
system referred to generator shaftspeed, pound-feet squared
N=rated synchronous speed, rpmP =number of poles= 120 f/NB, e =see vector diagram, Fig. 7X, R=see Figs. 2(C) and 18X¢, r8 = actual (or equivalent) tie-line con-
stants in pu on generator rating forsystem conditions corresponding toFig. 2(B); see Appendix II
A1, A2 a correction factor, see equations sentation is exact in the q axis and very11 and 14 nearly so for the d axis for rf.<<r«r which
is generally the case. Accordingly:
Appendix 11Park has given the electrical torque-
angle relationship of a synchronous machineoperating in synchronism at rated speedand connected to an infinite bus voltage c,
which is subject to small angular deviationsfrom an average operating load angle 6o.For convenience, his equation is repeatedhere:
X (j$)-Xd[ (is-rd +l)(.js7a +,)]Xg(jS) '+1)(jS'+ 1)]
xq(js)=X{ j7T-,Wt (21)
where the time constants are related asfollows:
dI= d rTdo; Id = : rdO;,rQ =X TqOXd Xd' Aq
AT T,=T(p)
{ [ +doi idoXq(p)] [(e sin Bo+ 4dop)Zd(p)+(C cos ao+4qop)Xd(p)] +[/'9o+iqoXd(P)] [(eC COS 5+ 'qo(P))ZQ(P) -(C sin ao+ 4dop)Xq(P)l I
D(p)(15)
where idO, iao, 4'do, and 4&eo are respectively,the steady-state armature circuit currentand flux linkages at the load angle 5o, and
D(p) = Zd(P)Zq(P)+Xd(p)XQ(p)Zd(P) = r+PXd(P)ZQ(P) = r+pXq(p) (16)
For steady-state oscillations at pulsationfrequency s, the operator p may be replacedby js and the numerical results of equation15 can be expressed in the form,
AT=-Te(js) =T2+jsTd ()A5
With Zero Armature Circuit ResistanceFor the case of zero armature circuit
resistance, equation 15 simplifies greatly.For the special case of X. 0:
AT- = T,(js)= T8o+ e's cos'5 oXAa
[2 )--) +e2 sin" o[Xd(jS)(17)
where T8o is the value of Ta for the condi-tion s=0 and is numerically equal to thetangeint to the steady-state torque angleequation:
T=- sin 8+e X X sin 28 (18)Xd 2XdXqrHence the value of Tso is:
T80=-=dT-- cos 8+es cos 25 (19)d8 Xd XdXaAnd, also it can be shown,
e2 coSI a e2 sin2 aTso = - +- --+ei sinUXQ Xd
where
tan 6= iXq cos 0e+iXq sin 0
Using equation 21, the bracketed quan-tities of equation 17 may be expressed inpartial fractions, then rationalized to yield:
[XdUs) XdI
$2 ard' P'r3d'X 1+r (Srd)+ 1+(STd')2is r a
+ a6 (22)Xd[1+(Srd')hl+(Srd') 2
=ad+jsbd
[X](js) X iX,{ l + (Srq A)2X{z'2rgq+js} (23)
=a +jsbqwhere
-(rd-Tdo)(d'-rd') -ll X-4(a- T4')( Td') =rdf)dp(rdO'-rd')trdO' rd')
(7-d I-Td w)-=XdT,Id ( Xd'I-X
(Xd'Xd' /
ifrqo t (X. X,f)
(24)
XQ
tfd r i d
XdX(p) ad ,
Xfd Xid
(19A)
(20)
The impedances Xd(js) and Xq(js) arethe input impedances to the direct andquadrature axis equivalent circuit of Fig.17 for the case of one equivalent dampercircuit in each axis. These impedances maybe represented in terms of appropriate timeconstants; see reference 12. Such repre-
Fig. 17. Equivalent circuit of synchronousmachine with one additional equivalent rotor
circuit in each axis
Shepherd-Torque Coefficients of Synchronous MachinesJuNE 1961 187

For the usual case where rdo'<<rd' andTd <7do', there is negligible error in theapproximation given for a and ,B in equa-tion 24.
Let the subscriptsf and k denote the fieldand amortisseur circuit respectively, thenwith equations 22-24, one may write:
ad=akd+afd bd=b+bfd
aq-=akq bq = bkq
where
Fxd-Xd1F Td' 1 1OfL xdx' JL l+(STd )2J sdarda_d =d 1 a2 M
Xd'Xd l1+(sTd')2J
rXd-xd' rTd 1
bfd=~ kqq [iakSq,I dXd Xd J) (STd) )
1 sTd
Xd-+d" (S7 d')2'kad=
=
(X '2X\2d
Xd XdN ] [ (STd)2+ 2
FXd' XdQ 1 rr qbkdq= LXd Xd +j (Srd 1)21 S2Td
(26)
it may also be shown that:
1 |Xad 2 1
brf-d VXd 1l+(STd )
1 lXd'-XI 2 1
rid V Xd J + (S7d)
bkq =1 Xa,2' 1
riq Xq 1 +(S.rqi)2
Tt is significant that
sbkqEEuEkq at sr0Q(= 1.0
and
1 1 XQ-Xq'sbkqlmax = akJ] max = X,X &2 2 Xqo
(27)
(28)
Similar relations hold for each rotor circuitin each axis.From these, it is evident that the maxi-
mum value of sTd and half the maximum Tscontribution for any individual rotor wind-ing are directly equal to the same reactancefactor at a value of s which makes sT= 1.0for that winding. In other words, the maxi-mum torques are determined solely by thereactances and where such maximums occur(with respect to s) is determined by thecircuit resistance, or time constant.
Curves of the coefficients of equation 26are shown in Fig. 3 for a particular generatorwhose constants are given.From the foregoing, equation 17 may be
rewritten in terms of the contribution of eachrotor winding in each axis, giving the equa-tion:
AT= Te(js)-= To+e2 cos2 5o(akq+jsbkq)+
e2 sin2 &A0(a,d+akd)+js(bfd+bkd)} (29)
which in turn yields equations 5 and 8directly.
Since the field time constant Td' is of theorder of 1/2 to 1 second or more, the value
afd approaches a limiting value of (Xd-Xd')/XdXd' for an extremely small value (andattains this value for higher values) ofpulsation frequency. For example, thevalue of afd will have reached 95% of itsfinal value at a value of s=0.0115 pu if rd' is377 radians (1 second). Since usual un-damped natural pulsation frequenciesusuallyare s = 0.02 or greater, one may considerthat, if any pulsation exists, then the fieldwinding is constributing a constant com-ponent equal to its maximum amount.Hence,
e2afd sin2 65X Xd e2 Si12 5oXdXd'
0.05 1
0 0.10 0.20 0.30 040
EQUIVALENT Xe pu.
Fig. 18. Values r. and X. for Fig. 2(B)equivalent to R and X and shunt load values of
Fig. 2(C)
With Tie-Line Reactance andShunt LoadAn approximate equivalent value of Xv
for use in the foregoing is that value corre-sponding to the short-circuit kva suppliedby the system external to the generator for ashort at the generator terminals, and ex-pressed as the fraction:
Generator kva ratingSystem short-circuit kva
0.30
0 25
Q20
0Z 0.15
° O. 10I(30)
The field-winding contribution to damp-ing torque coefficient is very high at ex-tremely small values of s but decreases veryrapidly so that in the region of s=0.03 ormore, its net contribution is usually quitesmall compared to the contribution of aneffective amortisseur winding.Assuming the maximum value of field
contribution to Ts and assuming zero valueof field contribution to Td, equation 29 yieldsthe final conservative results for Ts and Tdas given in equations 7 and 9.
With Tie-Line Reactance, Xe
If armature circuit resistance is zero, theforegoing analysis is equally valid if machinereactances and time constants include Xg andif 5 and 0 are determined with respect to theinfinite bus voltage, e. Accordingly, ma-chine reactances will be in series with Xe, in-cluding the reactances used for the determin-ing time constants. For Fig. 2(B) forre =0 and with line reactance Xe, equations7 and 9 become respectively:
Ts-Tso+el sin I (so +Xd-Xd' +T,.8o+2 sn2 So(Xd+Xe)(Xd'+Xe)
( Xd'-Xd' [l+Xe/Xd' SrdM 1
e2 sin2 LB+X1/Xed' 2
(Xd'+Xe)(Xd +XO) ~~~ ~~~~~~~~~~~~~~~~~~~~~~~~~~~~1+X.Xd STd)](X4'+X)(Xei~Xe)[1 1+Xe/Xd'
XQ-Xv5" 1+Xe/XqC S.I2e2 cos2 So L1XeX0l (31)
(X,V+X.)(_______ STq )
(Xd'-Xd') [1±+XelXd 'rdl"\2#
Td ~,-e2 sin2 So1 Xl+Xe/X +
(Xd'+Xe)(Xd'+Xe)[1+ 1+XeXdlSdrd
e2 cos2 So 2+(/XI
(Xq+Xe)(Xvif+Xe)[1+(1+xe/x STq(r
where, with external line reactance, Xe:
EdeTo= Coks so +
Xd+Xe
Xd-Xe2 Xd-Xq
Cos 260 (33)(Xq+Xe)(Xd+ Xe)
i(Xq+Xe) cos 0
ea+e±i(Xq+Xe) sin
e2= V2-2iVXe sin O+i2Xe2 (35)
The equivalent driving point impedanceinto a static shunt load of rated current andpower factor (i=0.8-jO.6) in parallel with a
tie-line impedance of R+jX as shown in
Fig. 2(C) may be obtained from Fig. 18.The re and Xe values thus found are for an
equivalent system condition correspondingto Fig. 2(B). Hence, for a given tie line,Fig. 2(B) conditions will give more pessi-
JUNE 1961Shepherd Torqzue Coefficients of Synchronous Machines
(32)
188

mistic results than Fig. 2(C) for tie-line im-pedance values usually encountered.
ReFerences1. DESIGN OF FLYWHEELS FOR RECIPROCATINGMACHINERY CONNECTED TO SYNCHRONOUS GENER-ATORS OR MOTORS, R. E. Doherty, R. F. Franklin.Transactions, American Society of MechanicalEngineers, New York, N. Y., vol. 42, 1920, pp. 523-67.
2. OSCILLATIONS AND RESONANCE IN SYSTEMS OFPARALLEL-CONNE3CTED SYNCHRONOUS MACHINES,H. V. Putnam. Journal, Franklin Institute,Philadelphia, Pa., vol. 197, May 1924, pp. 603-21;June, pp. 787-820.
3. POWER PULSATIONS BETWEEN SYNCHRONOUSGENERATORS, Troels Warming. Transactions,American Society of Mechanical Engineers, vol. 65,1943, pp. 165-76.
4. SYSTEM STABILITY ANALYSIS INCLUDINGGOVERNOR, ENGINE, GENERATOR AND TIE-LINEIMPEDANCE, L. D. Brinson, G. Parker, F. S.Rothe. Proceedings, 1960 Oil and Gas Power Con-ference, American Society of Mechanical Engineers,1961.
5. SYNCHRONOUS MACHINES-III, R. E. Doherty,C. A. Nickle. AIEE Transactions, vol. 46, Feb.1927, pp. 1-18.
6. TWO-REACTION THEORY OF SYNCHRONOUSMACHINES, GENERALIZED METHOD OF ANALYSIS-PART I, R. H. Park. Ibid., vol. 48, July 1929, pp.716-30.7. TWO-REACTION THEORY OF SYNCHRONOUSMACHINRE-PART II, R. H. Park. Ibid., vol. 52,June 1933, pp. 352-55.
8. POSITIVE AND NEGATIVE DAMPING IN SYN-CHRONOUS MACEHIN1ES, M. M. Liwschitz. Ibid.,vol. 60, May 1941, pp. 210-13.9. SPRING AND DAMPING COEFFICIENTS OF
SYNCHRONOUS MACHINES AND THEIR APPLICATION,Lee A. Kilgore, Eugene C. Whitney. Ibid., vol. 69,pt. I, 1950, pp. 226-30.
10. SYNCHRONOUS MACHINE DAMPING AND SYN-CHRONIZING TORQUES, Charles Concordia. Ibid.,vol. 70, pt. I, 1951, pp. 731-37.
11. EFFECT OF ARMATURE RESISTANCE UPONHUNTING OF SYNCHRONOUS MACHNES, C. F.Wagner. Ibid., vol. 49, July 1930, pp. 1011-26.
12. THE GENERAL THEORY OF ELECTRICALMACHINES (book), Bemard Adkins. Chapman &Hall, Ltd., London, England, 1957.
13. POWER SYSTEM STABILITY, VOL. II (book),S. B. Crary. John Wiley & Sons, Inc., New York,N. Y., 1947.
DiscussionF. S. Rothe (General Electric Company,Schenectady, N. Y.): The author has madea significant contribution toward a betterunderstanding of the effects of load andsystem impedance on the behavior of syn-chronous machines operated in parallel.Equation 32, in particular, can be arrangedto show very clearly how the addition ofsystem reactance, xe, substantially reducesthe effective damping torque coefficient,Td, from that available on an infinite bus.Thus,
e2 sin2 85 ( (Xd Xd')Tds +
Td=(XdI+Xe)2 + Xd +Xc 2]
e' coss 80 v (X-Xq')7q,o'
(Xq +X6)2 xe0(X/+X's 91L kXq+Xd J
This shows that the variation of Td with x,is a squared effect as described in Figs. 13and 15 of the paper.The practical aspects of this are that care
must be taken in the system design ofengine-generator plants when interconnect-ing such plants with large neighboringpower systems through electric ties of lowcapacity relative to the size of the generatingplant. Otherwise, as is shown in reference 4of the paper, sustained power oscillationsbetween the plant and the large system mayresult.
R. V. Shepherd: Mr. Rothe calls attentionto the importance of a "systems" viewpointin considering the performance or design ofinterconnected engine-generator plants.Thus the generator characteristic, coveredin this paper, is only one element of thesystem performance as is illustrated byFig. 1 of the paper. This figure is takenfrom the extensive investigation by Rotheand others; see reference 4 of the paper.Mr. Rothe also gives another (and
equivalent) form of equation 32 expressed interms of open, rather than the short-circuittime constants. Both e and 8g also varywith xe. The total effect of xc on Td isclosely approximated by the curves of Fig.15 (for a=45 degrees).
P. S. PUGHMEMBER AIEE
A VITAL development in the field ofIA transformer protection and mainte-nance for the first time makes availableeffective and sensitive means for detectinglow-energy incipient faults in power trans-formers having gas space above the in-sulating oil.The need for such a detector has been
recognized for many years and especiallywith the recent trend toward increased sizeof power transformers and the con-centration of power such as in a generator-transformer unit system. The failures inthe last few years of some of the largesthigh-voltage transformers produced byvarious manufacturers in this countryand Europe are a matter of growingconcern because of incipient faults which,if not recognized and corrected, can re-sult in serious outages.
Examination of transformers which
H. H. WAGNERFELLOW AIEE
have failed in service often shows that thefailure has progressed for some time withevidence of heating of insulation and oil.It is evident that many transformer faultsare preceded by an incipient stage ofgradual deterioration and gas evolution.
Field experience during the past 2 yearswith the equipment and procedure heredescribed has shown that in some casesan incipient fault and resulting gas evolu-tion may persist for as long as severalmonths before developing into an actualfailure and outage.
The New Method
GAS CHARACTERISTICSIt is known that the progress of an
incipient fault in an oil-immersed trans-former produces local heating which de-composes solid insulation and oil with
consequent production of several gases,some of which are combustible. Whilethe particular gases and the quantity pro-duced of each depend on various factorsof the fault such as temperature andtype of insulation material, usually bothsolid insulation and oil are involved.The results of research and development
involving several hundred laboratory andfield tests show that while at least 16different gases may be produced by in-cipient faults, not all of these appear inthe gas space above the oil. The absenceof some and the reduced concentration ofother gases results from the varying pro-portions of gases produced by differenttypes of faults; the different solubilitycharacteristics of the various gases, whichare also affected by pressure and tem-perature; and the relative instability ofsomne of the gases.
For example, acetylene not only has
Paper 61-59, recommended by the AIEE Trans-formers Committee and approved by the AIEBTechnical Operations Department for presentationat the AIEE Winter General Meeting, New York,N. Y., January 29-February 3, 1961. Manuscriptsubmitted October 31, 1960; made available forprinting December 1, 1960.
P. S. PUGH iS with the American Electric PowerService Corporation, New York, N. V., and H.H. WAGNER iS with the Pennsylvania TransformerDivision of McGraw-Edison Company, Canons-burg, Pa.
Pugh, Wagner-Detection of Incipient Faults in Transformers
Detection of Incipient Faults inTransrormers by Gas Analysis
JUNE: 196 1 189