-
Dynamic buckling and seismic fragility of anchored steel tanks
bythe added mass method
N. Buratti*, and M. Tavano
DICAM Department of Civil, Chemical, Environmental and Materials
Engineering, University of Bologna, Italy
SUMMARY
Buckling plays a fundamental role in the design of steel tanks
because of the small thicknesses of the wallsof this class of
structures. The rst part of the paper presents a review of this
phenomenon forliquid-containing circular cylindrical steel tanks
that are fully anchored at the base, considering the
differentbuckling modes and especially the secondary buckling
occurring in the top part of the tank.
A case study based on a cylindrical tank is then introduced in
order to investigate various aspects ofdynamic buckling. The nite
element model of the case study tank is set-up using the added mass
methodfor uid modelling. The inuence of pre-stress states caused by
hydrostatic pressure and self-weight on thenatural periods of the
structure is rst studied and it is found that this inuence is very
small as far as theglobal behaviour of the tanks is considered,
while it is important for local, shell-type, vibration modes.
In the following, the efciency and sufciency of different ground
motion intensity measures is analysedby means of cloud analysis
with a set of 40 recorded accelerograms. In particular, the peak
ground displace-ment has been found being the most efcient and
sufcient intensity measure so far as the maximum
relativedisplacement of the tank walls is concerned.
Finally, incremental nonlinear time-history analyses are
performed considering the case study structureunder recorded
earthquake ground motions in order to identify the critical
buckling loads and to derivefragility curves for the buckling limit
state. Copyright 2013 John Wiley & Sons, Ltd.
Received 28 December 2012; Revised 30 April 2013; Accepted 9 May
2013
KEY WORDS: steel tanks; earthquake response; nite elements;
added mass; buckling; ground-motionintensity measures; fragility
curves
1. INTRODUCTION
Buckling plays a fundamental role in the design of steel tanks
because of the small thicknesses ofthe walls of this class of
structures. Many researchers have studied the seismic behaviour
ofanchored liquid-storage tanks, investigating the effect of
hydrodynamic uidstructureinteraction on structural response. Past
studies have concluded that circular cylindrical anchoredtanks
containing a homogeneous liquid develop a cantilever-type behaviour
under horizontalaccelerations [110]. The hydrodynamic response of
the tank-liquid system is characterised bythe superposition of two
different contributions, named impulsive component and
convectivecomponent, respectively. If the tank walls are rigid, the
impulsive component represents theportion of liquid that moves in
unison with the tank walls. The liquid that moves with a
long-period sloshing motion in the upper portion of the tank is
represented by the convectivecomponent. These two components can be
considered uncoupled, because there are signicantdifferences in
their natural periods [2]. Furthermore, because the sloshing motion
of theconvective component is typically associated to long periods,
this latter component gives only
*Correspondence to: N. Buratti, DICAM Department of Civil,
Chemical, Environmental and Materials Engineering,University of
Bologna, Italy.E-mail: [email protected]
Copyright 2013 John Wiley & Sons, Ltd.
EARTHQUAKE ENGINEERING & STRUCTURAL DYNAMICSEarthquake Engng
Struct. Dyn. 2014; 43:121Published online 4 July 2013 in Wiley
Online Library (wileyonlinelibrary.com). DOI: 10.1002/eqe.2326
-
a small contribution to the total hydrodynamic pressure on the
tank walls and therefore, the globaltank response is mainly
inuenced by the impulsive component.
The complicated deformed congurations of liquid storage tanks
and the interaction betweenuid and structure result in a wide
variety of possible failure mechanisms during earthquakes.Brown et
al. [11] and Haroun [12] reported the damage on steel tanks due to
the 1994Northridge earthquake and to the 1979 Imperial Valley
earthquake. Damage on steel tanks wasalso observed by the authors
of the present paper after the 2012 Emilia earthquake, in
NorthernItaly, and is documented in Section 2. Shell buckling,
damage and collapses of tank roofs,base-anchorage failures, tank
support-system failures, differential settlements, partial
upliftingand pipe failures are the most observed failure modes.
Among all these failure modes, shellbuckling is what this paper
focuses on.
In past studies, the buckling problem for on-grade steel tanks
was investigated by means ofnumerical models in which the different
buckling modes (elephant0s foot, diamond shape andsecondary
buckling) are highlighted and discussed separately. However, there
is lack of studiesin which the buckling phenomenon is considered in
its entirety. In order to study the seismicvulnerability of liquid
storage tanks with respect to buckling, there is the need to set up
aunique criterion able to identify the buckling load for the
structure, including all types ofpossible buckling modes and to use
such criterion to build fragility curves. This is what isperformed
in the present work. Fragility curves for steel tanks can also be
found in ORourke[13] and Salzano [14], even if they are not specic
for buckling. In fact, they refer to moregeneral damage states,
dened by the HAZUS damage classication [15]. In the present
work,fragility curves for buckling are obtained by means of
incremental time-history analysesperformed on a three-dimensional
model of an anchored steel tank with a height-to-diameterratio
typical of petroleum tank farms (H/D = 0.4).
When setting up a tank model, the problem of how to model the
liquid immediately arises.Various approaches have been proposed in
the literature, for example, analytical approaches[16], FEM-based
models adopting either added-mass approximations or uid-specic
niteelements [1720], BEMFEM coupled models [21], and smoothed
particle hydrodynamics [22, 23].In the present paper, the added
mass method was chosen for liquid modelling because it representsa
good compromise between accuracy and computational cost [24].
Non-linear dynamic analyses using a set of 40 recorded
accelerograms were performed usingthe nite element software ABAQUS
(Rhode Island, USA) [25, 26] in order to investigate theefciency
and sufciency of different ground-motion intensity measures (IMs).
Then,incremental dynamic analyses were carried out, and their
results were processed using theBudianskyRoth buckling criterion
[27, 28] and pseudo-equilibrium paths [24], in order toprovide an
estimate of the dynamic buckling load and to understand which was
the dominantbuckling mode. Finally, the dynamic buckling loads were
used to make some considerationsabout the seismic fragility of the
tank with respect to buckling.
2. BUCKLING OF STEEL TANKS UNDER SEISMIC ACTIONS
The buckling behaviour of steel tanks under seismic excitation
has been analysed by means ofexperimental and computational
studies, and two main buckling types have been dened:elasticplastic
buckling and elastic buckling. These two buckling types are
explicitly mentionedin actual codes as Eurocode 8 [29] and New
Zealand guidelines [30] and implicitly accountedfor in the API
formulation [31].
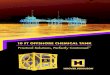
The elasticplastic behaviour is associated with the so called
elephants foot buckling, whichis characterised by an outward bulge
just above the base of the tank. This kind of buckling isclearly
visible in the picture in Figure 1 that was taken by the authors
during a eld surveyafter the Emilia earthquake that struck Northern
Italy in May 2012. The bottom of the shell isnormally in a biaxial
stress state consisting of hoop tension and axial compression. The
bulgeformation results from the large circumferential tensile
stresses due to the internal pressures(hydrostatic and hydrodynamic
due to vertical excitation), in combination with the axial
2 N. BURATTI AND M. TAVANO
Copyright 2013 John Wiley & Sons, Ltd. Earthquake Engng
Struct. Dyn. 2014; 43:121DOI: 10.1002/eqe
-
compression stresses due to the overturning moment caused by
horizontal earthquake excitation.In fact, when the hoop stress
reaches the yield limit, the annular strips of the tank
cannotsustain any load increment and therefore, the structural
scheme resisting to a further verticalload increment is represented
by a tall plate a few millimetres thick. It is immediate
tounderstand how this element can reach quickly a buckling failure.
Eurocode 8 and NewZealand guidelines suggest the Rotter [32]
formula to compute the buckling capacity withrespect to
elasticplastic buckling,
f pb sc1 1pRtwf y
!22435 1 1
1:12 r1:5
r f y=250r 1
; (1)
where sc1 0:605EwtwR is the Eulers critical axial compressive
stress, R is the tank radius, p is thetotal internal pressure, Ew
and tw are the elastic modulus and the thickness of the tank walls,
fy isthe steel yielding stress, and r is a coefcient dened as r
=R/(400 t).
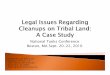
The elastic buckling is associated with the so-called
diamond-shape buckling, characterisedby shell crippling at the base
of the tank (Figure 2). This type of buckling is due to the
axialcompression forces developed at the general meridian line that
are due to the self-weight of thetank walls and roof and to the
increment given by the seismic action. The diamond shapebuckling is
much less common than the elephants foot because it occurs at small
values ofhoop stress. The axial membrane stress that needs to
induce elastic buckling in a shell dependson the internal pressure
and the amplitude of imperfections in the shell. In particular, the
lattertend to decrease the buckling stress to a fraction of the
classical (Eulers) buckling stress. Theinternal pressure reduces
the effective imperfection amplitude and therefore increases
the
Figure 1. Elephants foot buckling, emilia earthquake, Italy, 20
and 29 May 2012.
Figure 2. Diamond shape buckling, emilia earthquake, Italy, 20
and 29 May 2012.
DYNAMIC BUCKLING AND SEISMIC FRAGILITY OF ANCHORED STEEL TANKS
3
Copyright 2013 John Wiley & Sons, Ltd. Earthquake Engng
Struct. Dyn. 2014; 43:121DOI: 10.1002/eqe
-
buckling stress. Because of these reasons, the buckling capacity
with respect to elastic bucklingcan be computed by applying a
proper knockdown factor, a^ , to the critical Eulers
axialcompressive stress for an axially loaded, linear-elastic
cylinder,
f mb a^0:605EwtwR
(2)
The knockdown factor takes into account imperfections
sensitivity of the bent cylindrical shelland proper values of it
were given by the European Convention for Constructional Steelwork
in[33]. Eurocode 8 and NZSEE propose a different formula for the
elastic critical buckling stresswith regard to the elastic buckling
limit state, which represents a further development ofequation 2
[34].
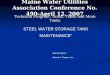
In addition to the well-known elephants foot and diamond shape
buckling modes, a third kindof buckling, due to external pressure
and cavitation, is mentioned by Rammerstofer et al. [3] andconrmed
also by observations on real tanks after earthquakes (Figure 3).
However, this bucklingmode is not covered by current codes, and
until now, no empirical formula associated to it existsin
literature. In the present work, this third buckling mode is named
secondary buckling, inorder to distinguish it from the rst type of
elastic buckling (diamond shape). Computationalstudies on secondary
buckling are mainly by Virella et al. [24]. From a mechanical point
ofview, it is caused by the pressure at the top of the shell, where
the resultant pressure(superposition of the hydrodynamic and
hydrostatic pressures) acts in the inward direction, thuscausing
axial compression forces in the annular strips, as illustrated in
Figure 4. Thesecompression forces in addition to the small
thickness of the tanks walls at the top, may lead toan elastic
buckling problem, which appears in the form of cavitation.
3. FLUID MODELLING WITH THE ADDED MASS METHOD
The added mass method was rst developed by Westergaard [19] in a
seminal study concerning thedynamic interaction between dams and
reservoir systems. According to Westergaard, thehydrodynamic
pressures that the water exerts on the dam during an earthquake are
the same as if afraction of the volume of water moved together with
the dam. Westergaard considered the dam asrigid. Later Lee and Tsai
studied the dynamic interaction between the retained water and a
exibledam using modal analysis [35, 36]. They considered the dam as
a EulerBernoulli beam andshowed that the added mass, which vibrates
together with the structure during the imposedexcitation, results
from the hydrodynamic effect due to the current deection of the
structure and thecurrent response of the entire system. Therefore,
the added mass is a function of the mode shapes ofboth the
structure and the reservoir.
Figure 3. Secondary buckling, emilia earthquake, Italy, 20 and
29 May 2012.
4 N. BURATTI AND M. TAVANO
Copyright 2013 John Wiley & Sons, Ltd. Earthquake Engng
Struct. Dyn. 2014; 43:121DOI: 10.1002/eqe
-
As far as liquid-containing tanks are concerned, two main
categories of added mass models canbe found in the literature,
those aimed at simulating the global behaviour of tanks (e.g.
theoverturning moment and the total base shear), which use a few
lumped masses, one for eachpressure component [3739], and those
aimed at analysing the local behaviour of tank walls.Examples of
this latter category of added mass models, which will be used in
the present studyand discussed in the following, can be found in
Virella et al. [20, 24, 40].
The inertia of the portion of the uid that acts impulsively is
lumped in with the inertia of thetank walls, and the added masses
are calculated from pressure distributions of rigid
tanks.Proceeding in this way, the added mass values are constant
during the dynamic simulation. Butthis approach is not strictly
correct; in fact, after what Lee and Tsai have shown for
exiblestructures the added mass depends on the deection of the
structure and therefore is notconstant over time [35, 36]. However,
in case of tank liquid systems, the studies by Veletsosand Yang [6]
and Haroun and Housner [7] have shown that the pressure
distribution due to theliquid impulsive component in rigid and
exible tanks are similar, in particular for broad tanks(H/R< 1)
as indicated by the diagrams in Figure 5. Therefore, an added mass
method thatemploys constant over time masses can be applied with
reference to broad tanks.
It is worth noticing that the added mass model is easily
implemented in any FEMsoftware because it does not require any
special purpose nite element. Furthermore, DeAngelis, Giannini [37]
favourably compared the results obtained by using this model
withexperimental tests [37].
impp impp
hydp hydp
Buc
klin
g zo
ne
imp hydp p
Figure 4. Compression force developed in an annular strip
located in the zone of buckling, after [24].
00
0.2
0.3
0.5 0.5
1 1
2
H/R = 5
0.4
0.6
0.8
1
0
0.2
0.4
0.6
0.8
1
0.5 1 0 0.5 1
H/R = 3
ci() ci1()
Figure 5. Pressure distribution along the tank height (a) for
rigid and (b) for the rst mode of exibletanks, after [2].
DYNAMIC BUCKLING AND SEISMIC FRAGILITY OF ANCHORED STEEL TANKS
5
Copyright 2013 John Wiley & Sons, Ltd. Earthquake Engng
Struct. Dyn. 2014; 43:121DOI: 10.1002/eqe
-
4. CASE STUDY: A STEEL TANK UNDER SEISMIC ACTIONS
According to the previous considerations, a broad tank was
considered in the present study,whose geometric characteristics are
taken from Virella [24] and are shown in Figure 6. A 90%lling level
was considered. The tank is assumed without a roof structure.
Because full baseanchorage is considered and the primary interest
of the paper is on the buckling of the cylindershell, the model has
clamped conditions at the base. The tank walls material is steel
S275 withelastic-hardening constitutive behaviour, dened the
following mechanical properties: yieldstrength fy = 275.0MPa,
ultimate strength fu = 430.0MPa, elastic modulus E = 210000.0MPa
andstrain hardening modulus Eh = 3888.0MPa.
4.1. Finite element model
The nite element analysis package ABAQUS [25, 26] was used to
carry out all the analyses. Anite element mesh of 7080 elements was
used to assure convergence of the solution. Themesh size was dened
performing a convergence study in which a set of nonlinear
staticanalyses was performed on meshes with decreasing size until
the results did not show anysignicant mesh dependency [41].
Further, details can be found in [34]. Four-node,doubly curved
shell elements with reduced integration and nite membrane strain
formulationwere employed.
From a practical point of view, the added mass approach
essentially consists in deriving liquidmasses from pressure
distributions and to attach them to the shell nodes of a nite
element modelby means of one-direction elements, as shown in Figure
7. Because the added masses aredetermined from the hydrodynamic
pressure that is normal to the shell surface, they must bedened in
such a way that they only add inertia in that direction. Therefore,
the one-directionelements (MPC type LINKS in ABAQUS) have supports
oriented in their local axes thatconstrain the motion of the nodal
masses to the normal direction of the shell. The motion of
30480 mm
2425 mm
2416 mm
2416 mm
2416 mm
2416 mm
1088
0 m
m12
089
mm
12.7 mmwt =9.5 mmwt =7.9 mmwt =7.9 mmwt =7.9 mmwt =liquid
level
Figure 6. Geometric characteristics of the tank considered (in
mm).
Pinned rigid linkSupportsAdded masses
Figure 7. Schematic representation of the added-mass model,
after [20].
6 N. BURATTI AND M. TAVANO
Copyright 2013 John Wiley & Sons, Ltd. Earthquake Engng
Struct. Dyn. 2014; 43:121DOI: 10.1002/eqe
-
each support is restricted in the global tangential and vertical
directions, whereas it is free in theradial direction. The added
mass model is obtained from a pressure distribution for the
impulsivemode of the tank-liquid system and the convective
component is neglected [20, 24]. Theimpulsive pressure distribution
is obtained from the horizontal rigid body motion of a
rigidtank-liquid system and can be expressed in a cylindrical
reference system as
pi z; y; t ci z xg t rR cos y ; (3)where z indicates the
coordinate along the axis of the cylinder, y is the circumferential
position, tis the general time, xg t is the ground acceleration
time history, r is the water density and thefunction ci(z)
describes the pressure distribution along the tanks height and can
be determinedafter Veletsos and Shivakumar [2]. The lumped mass at
each node of the mesh is computed bymultiplying the pressure acting
on the tank walls (equation (2)) by the tributary area of thenode
and dividing by the reference ground acceleration an xg t cos y .
Therefore, for thegeneral interior node, the expression of the
lumped mass is given by equation (4),
mi piE2size
an ci z rRE2size; (4)
where Esize is the edge length of the rectangular nite elements
used that was set in the presentwork equal to 500mm.
5. MODAL ANALYSIS
Prior to the dynamic buckling analysis, the modal properties of
the tank were investigated. Inparticular, the rst 30 natural
periods and mode shapes of the tank-liquid system were
evaluatedunder two different assumptions, that is, by either
neglecting or considering the pre-stress stateproduced by the
hydrostatic pressure and the self-weight of the tank. Table I
reports the naturalperiods obtained. Only the odd natural periods
are listed because, due to the symmetry of thestructure, duplicated
natural modes were obtained. The pre-stress state strongly affects
the naturalperiods of the tank-uid system, by reducing the natural
periods. However, if the natural periods areplotted versus the
number of circumferential waves, n, as performed in Figure 8, it is
possible tonotice that the effect of the pre-stress state is
smaller for the modes characterised by low
Table I. Effect of the pre-stress on the periods, T, of the rst
30 natural modes :n and m indicate the numberof circumferential and
axial waves, respectively.
Pre-stress considered Pre-stress neglected
Mode T [s] m n T [s] m n
1 0.96 1 8 2.74 1 143 0.96 1 9 2.70 1 155 0.93 1 10 2.69 1 137
0.92 1 7 2.60 1 169 0.89 1 11 2.54 1 1211 0.84 1 12 2.46 1 1713
0.83 1 6 2.32 1 1815 0.79 1 13 2.31 1 1117 0.75 1 14 2.19 1 1919
0.71 1 15 2.07 1 2021 0.69 1 5 2.02 1 1023 0.67 1 16 1.96 1 2125
0.64 1 17 1.85 1 2227 0.61 1 18 1.75 1 2329 0.58 1 19 1.72 1 9
DYNAMIC BUCKLING AND SEISMIC FRAGILITY OF ANCHORED STEEL TANKS
7
Copyright 2013 John Wiley & Sons, Ltd. Earthquake Engng
Struct. Dyn. 2014; 43:121DOI: 10.1002/eqe
-
circumferential wave numbers (e.g. n< 10). The results found
here and collected in Table II are inagreement with the results of
Virella et al. [40].
It must be noted that Figure 8 refers to the rst 30 modes
extracted byABAQUS, which extractsmodes in decreasing order of
natural period, but the participating mass in the x-direction of
thesemodes is very small, and therefore, these modes are not the
most signicant in describing theglobal response of the structure;
however, they may be important for the local behaviour of thetanks
walls.
For this reason, a second analysis was performed, considering
only the natural modes with thelargest participating mass ratio,
ax, and in particular, a number of modes that sufces in order
toobtain a total participating mass greater than the 85% of the
total mass of the system; sevenmodes were required for the tank-uid
system considered. All the details about these modesare reported in
Table II, from which it is possible to note that they are all
cantilever-typemodes (n = 1). In the light of what is shown in
Figure 8, for these modes, the effect of pre-stress states is
negligible. Therefore, pre-stress states can be neglected when
investigating theglobal behaviour (i.e. the total shear force or
the overturning bending moment at the base) ofthe structure under
earthquake accelerations.
6. DYNAMIC BUCKLING ANALYSIS
6.1. Overview of the analysis procedure
Once the added mass model has been validated through modal
analysis, dynamic time-history analysesare performed including both
material and geometric nonlinearities. The nonlinear equations of
motionare solved using an implicit time-integration technique
available in ABAQUS/Standard [26]. Only
5 10 15 20 250.5
1
1.5
2
2.5
3
3.5
4
Circumferential wave number nT
[s]
Prestress state consideredPrestress state neglected
Figure 8. Dependency of the natural period of the rst 30 modes
of the tank on the circumferentialwave number, n.
Table II. Effect of the pre-stress on periods, T, of the
cantilever-type vibration modes with the largesteffective modal
masses, ax: n and m indicate the number of circumferential and
axial waves, respectively.
Pre-stress considered Pre-stress neglected
Mode T ax m n T ax m n[s] [] [] [] [s] [] [] []
1 0.22 0.44 1 1 0.22 0.43 1 12 0.22 0.14 >1 1 0.22 0.15 >1
13 0.18 0.09 >1 1 0.18 0.10 >1 14 0.22 0.08 >1 1 0.22 0.08
>1 15 0.18 0.05 >1 1 0.18 0.05 >1 16 0.20 0.04 >1 1
0.20 0.03 >1 17 0.23 0.03 >1 1 0.21 0.02 >1 1
8 N. BURATTI AND M. TAVANO
Copyright 2013 John Wiley & Sons, Ltd. Earthquake Engng
Struct. Dyn. 2014; 43:121DOI: 10.1002/eqe
-
unidirectional ground-motions were considered here, therefore,
the model was accelerated only inthe x-direction. The main
objective of the analysis performed herein is to estimate the
dynamicbuckling load, which in this case is represented by the peak
ground acceleration (PGA) thatproduces buckling, PGAcr. To this
aim, the dynamic simulation is not performed using theoriginal
ground motion record, but the base accelerogram, xg t , is scaled
according toincreasing values of PGA. In particular, several
analyses are performed for increasing values ofPGA, from 0.02 g to
0.75 g.
It is worth noticing that the PGA is the most widely used ground
motion IM used in theliterature related to tanks [11, 13, 14, 24,
4244], therefore, it will be adopted in this sectionof the present
paper. Alternative IMs will be investigated and discussed in
Section 7.1.
6.2. Evaluation of the critical buckling load
To identify the dynamic buckling load of the tank, the
BudianskyRoth criterion [2, 4, 24, 27, 28, 45],which has been used
extensively in the literature to determine the dynamic buckling
load ofstructures, was employed in the present study. According to
the aforementioned criterion,different analyses of the structure
for several load levels (PGA values in this case) need to becarried
out, and the load value for which there is a signicant jump in the
response for a smallincrease in the load indicates that the
structure moves from a stable state to a critical state.The rst
step required by the BudianskyRoth criterion is to monitor the
transient response ofselected points of the structure. Criteria
used to select the most representative node of thestructure are
discussed at the end of this Section. For now, with the sole
purpose of illustratingthe criterion, the attention is focused on
the transient response of one node. From Figure 9, itis evident how
a signicant jump in the displacement eld can be observed only for
PGAsabove 0.70 g.
The dynamic buckling load can be more clearly identied by
plotting the maximum radialdisplacement of the control node
recorded during the different analyses versus the correspondingPGA
values, as performed in Figure 10. The so obtained points can be
used to t a bilinearregression model, thus producing a so called
pseudo-equilibrium path, as proposed by Virella et al.[24]. The
intersection of the two lines constituting the path provides an
estimate of the critical PGA,PGAcr, that is, the ground-motion
intensity at the transition from the stable to the unstable
path.
In order to dene the control node, two grids of points were xed
in those parts of the structurewhere the maximum deformations and
plasticization were expected (see Figure 11). The
pseudo-equilibrium paths were then built for each node belonging to
the two grids, and the actual controlnode was assumed to be the one
that developed the smallest critical PGA value. This criterion
isparticularly important because the position of the control node
may change in the different analyses.
6.2.1. Buckling models observed during the analyses. Figure 12
shows the deformed shape of thetank walls at a general step of the
dynamic analyses performed, and it is particularly illustrative
0 1 2 3 4 5 6 7 8 9 1050
0
50
time [s]
ur [m
m]
PGA=0.10gPGA=0.30gPGA=0.40gPGA=0.50gPGA=0.60gPGA=0.65gPGA=0.70gPGA=0.75g
Figure 9. Time histories of the radial displacement of one node
of the FE model for increasing PGA valuesof the base
accelerogram.
DYNAMIC BUCKLING AND SEISMIC FRAGILITY OF ANCHORED STEEL TANKS
9
Copyright 2013 John Wiley & Sons, Ltd. Earthquake Engng
Struct. Dyn. 2014; 43:121DOI: 10.1002/eqe
-
Secondary buckling
Elephant footbuckling
Figure 12. Deformed shape of the tank at the onset of
buckling.
0 10 20 30 40 500
0.2
0.4
0.6
0.8
Critical PGA=0.645g
max|ur| [mm]
PGA
[g]
Figure 10. Pseudo-equilibrium path for one node of the FE
model.
Ground
motion
Figure 11. Grid points among which the control node is
searched.
10 N. BURATTI AND M. TAVANO
Copyright 2013 John Wiley & Sons, Ltd. Earthquake Engng
Struct. Dyn. 2014; 43:121DOI: 10.1002/eqe
-
because two buckling phenomena can be observed. The rst one is
the presence of secondarybuckling at the upper-middle part of the
shell. The second one is the formation of anelephants foot bulge at
the bottom of the tank, in the yielded region (see Figure 13). In
thiscase, secondary buckling occurred for PGA values larger than
0.40 g, a few seconds after thepeak base acceleration. The
elephants foot bulge at the base developed for PGA values
largerthan 0.55 g. Because the elephants foot buckling has been
widely discussed in the literatureand it is fully covered by the
current regulations, our attention is mainly focused on the
localbuckling at the upper-middle part of the shell. In particular,
it is not yet clear if it is a pureelastic buckling or if material
yielding plays a direct role as for the elephants foot buckling.
Arst step in understanding this issue is to perform analyses
assuming a linear elastic behaviourfor the material. The results of
such analyses showed that the secondary buckling phenomenonoccurred
even when considering linear elastic materials; therefore, it can
be dened as a purelyelastic buckling.
6.2.2. Effect of plasticity. In order to understand the inuence
of material yielding on the criticalPGA, the pseudo-equilibrium
paths resulting from elastic and elasticplastic analyses
werecompared, as illustrated in Figure 14. As expected, the
elasticplastic critical PGA is lowerthan the elastic one. In
particular, a reduction of about 40% is observed. Therefore,
thepseudo-equilibrium paths are strongly inuenced by material
yielding. Furthermore, it isinteresting to notice that the control
node to which the elasticplastic curve is referred to isstill
located in an elastic region; this means that the failure mode is
still characterised by pure
+0.00e+00+8.60e05+1.72e04+2.58e04+3.44e04+4.30e04+5.16e04+6.02e04+6.88e04+7.74e04+8.60e04+9.46e04+1.03e03
Figure 13. Equivalent plastic strain and elephants foot bulge at
the base of the tank.
0 20 40 60 800
0.2
0.4
0.6
0.8
0.645gElastic path
0.371g
Elasticplastic path
max|ur| [mm]
PGA
[g]
Figure 14. Elastic and elasticplastic pseudo-equilibrium
paths.
DYNAMIC BUCKLING AND SEISMIC FRAGILITY OF ANCHORED STEEL TANKS
11
Copyright 2013 John Wiley & Sons, Ltd. Earthquake Engng
Struct. Dyn. 2014; 43:121DOI: 10.1002/eqe
-
elastic buckling, but the value of PGA at which this buckling
occurs is strongly reduced byplastic strains in other parts of the
structure. We can conclude that material yielding leads toimportant
changes in global behaviour of the structure.
7. SEISMIC VULNERABILITY
7.1. Efciency and sufciency of ground-motion intensity
measures
The seismic vulnerability of structures is often characterised
by a fragility curve that gives theprobability of occurrence for a
general limit state as a function of a ground-motion IM. Thislatter
is a parameter describing the intensity of ground motions and in
particular, their severityon structures. Examples of commonly used
IMs are the PGA, the peak ground velocity (PGV),the peak ground
displacement (PGD), the pseudo spectral accelerations (PSA) at
differentperiods, etc. Past studies dealing with seismic risk
analysis and fragility curves for liquid-containing tanks may be
found in Iervolino et al. [46], ORourke et al. [13], Salzano et
al.[14] and Talaslidis et al. [47], in all these studies, the PGA
is used as IM.
The limit state considered in the present paper is the dynamic
buckling, and the probability of failureis intended as the
probability of having buckling for a given value of a certain
ground motion intensitymeasure im, as expressed by equation (5)
Pf P IMcr im ; (5)
where IMcr is the random variable, which represent those
particular values of the IM producingbuckling. The probability of
failure in equation (5) can be rewritten in terms of
conditionalprobability as
Pf P buckling IM im:j (6)
The correct choice of the IM is of crucial importance in
describing the structural response.Because for liquid-storage
tanks, there is lack of studies in the literature about this topic,
acontribution on the efciency and sufciency of four different
ground-motion IMs is given here.
7.1.1. Efciency. According to Tothong [48], an IM is dened
efcient if its adoption results inrelatively small variability of
structural response for a given IM level, that is, if the IM is a
goodpredictor of structural response (e.g. maximum displacement).
Different approaches may be usedto evaluate efciency, the most
common being stripe/multi-stripe analysis, IDA
capacity-basedanalysis and cloud analysis. An extensive discussion
of those different analysis methods isavailable in Baker [49].
All the aforementioned methods listed require to scaling ground
motions to specic target IMvalues with the exception of cloud
analysis. With this latter method, the structure is subjected to
aset of ground motions that, in general, are either left unmodied,
or all records are scaled by aconstant factor if the unmodied
records are not strong enough to induce the structuralresponse
level of interest. The set of IM levels of the accelerograms and
their associatedstructural-response values resulting from nonlinear
dynamic analysis are sometimes referred toas a cloud, because they
form a rough ellipse when plotted. Regression analysis can be
usedon this cloud of data to compute the conditional mean and
standard deviation of differentstructural-response values given IM.
A linear relationship between the logarithms of the twovariables
often provides a reasonable estimate [49].
In the present work, cloud analysis was adopted to avoid
ground-motion scaling because theeffects of such procedure have not
been yet fully investigated as far as liquid containing tanksare
concerned. Forty nonlinear time-history analyses are performed
using 40 differentaccelerograms from the Next Generation of
Ground-Motion Attenuation Models (NGA) projectdatabase [50], chosen
according to the following criteria [51]: (i) moment magnitude,
Mw,
12 N. BURATTI AND M. TAVANO
Copyright 2013 John Wiley & Sons, Ltd. Earthquake Engng
Struct. Dyn. 2014; 43:121DOI: 10.1002/eqe
-
spanning from 6.0 to 8.0; (ii) JoynerBoore distance. RJB,
spanning from 0.0 to 30.0 km; (iii) nopulse-like records, according
to the classication by [52]; (iv) maximum usable period greaterthan
3.0 s [53]; (v) only one horizontal component per record. In
addition to the aforementionedcriteria, in order to increase the
goodness of the efciency analysis, accelerograms were selectedin
order to obtain a set PGA values as logarithmically spaced as
possible. The magnitude - distancedistribution of the accelerograms
used is depicted in Figure 15.
In Figure 16, for each analysis, the maximum radial
displacement, max |ur|, occurring in the tank isplotted in
double-logarithmic scale versus the four different IMs taken into
consideration. For eachcase, the linear regression model
ln max urj j b0 b1 ln im e (7)
was tted. In Equation (6), im indicates the general intensity
measure, b0, e, b1 areunknown regression coefcients, and e is a
standard error term. In cloud analysis, theefciency may be quantied
by the standard deviation of the error term, se. This latter
parameter isreported in Figure 16 together with the slope of the
regression line and the coefcient ofdetermination R2.
From the results reported in Figure 16, it is possible to notice
that the structural responseseems to be scarcely correlated with
PGA and PSA, whereas it has a very strong correlationwith PGD (se=
0.29, R
2 = 0.86), which can be dened the most efcient ground-motion IM.
Inthe literature, the PGD is considered an efcient IM for exible
structures with long periods[54]. In the uid-tank system
investigated in the present paper, two groups of modes can
beidentied: short-period cantilever-type modes controlling the
global behaviour (e.g. overturningbending moment, base shear, etc.)
and long-period shell-type model, characterised by a numberof
circumferential waves greater than 1. The maximum radial
displacement, max |ur|, isprobably connected to the latter group of
modes, in fact, from Figure 17, it is possible tonotice that the
deformed shape of the tank assumes a wave form, typical of shell
modal forms,in the upper-middle part, where the maximum radial
displacements occurs.
7.1.2. Sufciency. An IM is considered sufcient if the
distribution of structural response values fora given IM value is
independent of other parameters involved in the calculation of
seismic hazard,mainly, magnitude, source to site distance and e
(this latter parameter describes how manystandard deviations the
spectral acceleration at a given period is distant from the mean
spectralacceleration predicted by a given attenuation relationship
[48]). Sufciency is particularlyimportant for dening sound ground
motion selection criteria for nonlinear analyses [48].
In cloud analyses, sufciency is analysed by evaluating the
correlation between the residuals ofthe linear regression described
in Section 6.1.1 with the aforementioned parameters involved in
0 5 10 15 20 256
6.5
7
7.5
8
RJB [km]
Mw
Figure 15. Magnitude-distance distribution of the 40
accelerograms used for efciency and sufciency analysis.
DYNAMIC BUCKLING AND SEISMIC FRAGILITY OF ANCHORED STEEL TANKS
13
Copyright 2013 John Wiley & Sons, Ltd. Earthquake Engng
Struct. Dyn. 2014; 43:121DOI: 10.1002/eqe
-
101 100 101
101 100 101
102 101 100
102 101 100
101
101
102
103
PGA [g]
Slope: 0.62 R2: 0.25 : 0.67
PSA(T1) [g]
Slope: 0.54 R2: 0.16 : 0.71
PGV [m/s]
Slope: 0.94 R2: 0.68 : 0.44
PGD [m]
Slope: 0.75 R2: 0.86 : 0.29
max
|u r| [m
m]m
ax|u r|
[mm]
max
|u r| [m
m]m
ax|u r|
[mm]
101
102
103
101
102
103
101
102
103
a
b
c
d
Figure 16. Efciency of ground-motion intensity measures: peak
ground acceleration (PGA) (a), Spectralacceleration at the rst
natural period, Sa(T1) (b), peak ground velocity (PGV) (c), peak
ground
displacement (PGD) (d).
14 N. BURATTI AND M. TAVANO
Copyright 2013 John Wiley & Sons, Ltd. Earthquake Engng
Struct. Dyn. 2014; 43:121DOI: 10.1002/eqe
-
hazard calculation. In the present study, the sufciency was
evaluated with respect to Mw and RJBby tting the following linear
regression models:
ln rim b0 b1Mw eln rim b0 b1RJB e
(8)
where rim indicates the residuals of the regression performed
using Equation (6) considering theintensity measure, im.
As an example, Figures 18 and 19 show the dependency onMw (a)
and RJB (b) of residuals obtainedby tting the model in Eq. (6)
considering either IM=PGD or IM=PGA. It is clearly evident that
PGAis less sufcient than PGD especially in terms of Mw. Figures 17
and 18 also give the slopecoefcient of the regression line depicted
and the p-value for the F-statistics corresponding tothe null
hypothesis b1 = 0. A summary of the results is provided in Table
III from which it ispossible to conclude that the most efcient
measure is PGD, which shows sufciency also ingeneral terms.
7.2. Fragility analysis
7.2.1. Denition of the ground-motion set for fragility analysis.
The fragility with respect to dynamicbuckling is evaluated for a
case study atmospheric tank located in the industrial plant in
Milazzo, Italy.
In order to derive site-specic fragility curves, the
accelerograms used for incremental dynamicanalysis were selected on
the basis of information on the response spectrum at Milazzo.
Inparticular, the 5% damped elastic spectrum with 475 years return
period is calculated using theItalian Seismic Code prescriptions
[55]. A type A soil is assumed and therefore, according tothe
Italian code, a reference PGA of 1.89m/s2 is considered.
Accelerograms were selected from the NGA ground-motion database,
identifying a group of 14records with an average acceleration
response spectrum compatible (according to EC8 criteria) withthe
previously dened site spectrum. Spectral compatibility was dened in
the period range[Tmin = 0.178 s, 2 Tmax = 0.456 s] to account the
main for cantilever-type modes (n = 1). This periodrange was dened
according to the general criteria suggested by EC8. Furthermore,
given the resultsin terms of efciency long-period spectral
accelerations are well-correlated with PGD [54] andin order to take
into account the effect of long-period local modes, spectral
compatibility wasrequired also in the long period range T> 1.0
s.
Dening the range of signicant periods for spectral
compatibility, it is possible to select those 14accelerograms whose
average spectrum best ts the site-specic elastic spectrum in that
range. Inparticular, an automatic procedure has been implemented
allowing to analyse all the possible
Figure 17. Deformed shape of the tank when the maximum radial
displacement was attained in one of theanalyses performed.
DYNAMIC BUCKLING AND SEISMIC FRAGILITY OF ANCHORED STEEL TANKS
15
Copyright 2013 John Wiley & Sons, Ltd. Earthquake Engng
Struct. Dyn. 2014; 43:121DOI: 10.1002/eqe
-
combinations of the required number of accelerograms in order to
identify the group with the best t.The accelerograms selected are
listed in Table IV and their PSA response spectra are depicted
inFigure 20 together with their average spectrum.
To investigate the fragility with respect to dynamic buckling,
the incremental dynamic analysisprocedure presented in Section 6.2
is repeated for the tank subjected to the 14 response
spectrum-compatible accelerograms. Applying the BudianskyRoth
criterion to the results of each of them,14 pseudo-equilibrium
paths are built and therefore, 14 values of PGAcr are obtained. At
the sametime, it is possible to dene also the critical values for
all the other IMs considered in the presentpaper. All these
critical values are collected in Table V. However, the results of
accelerograms 1,2 and 7 are considered to be unreliable, because
the scale factor associated with them is too high[56]. Because of
this reason, these three accelerograms are excluded from the
calculations ofSection 6.3 to obtain the fragility curves.
6 6.5 7 7.5 81.5
1
0.5
0
0.5
1
1.5
resid
uals
Slope: 0.03 pvalue: 7.64e1
0 5 10 15 20 251.5
1
0.5
0
0.5
1
1.5
resid
uals
Slope: 0.00 pvalue: 6.26e1
Mw
RJB [km]
a
b
Figure 18. Sufciency of peak ground displacement (PGD) in terms
of moment magnitude (a) andJoynerBoore distance (b).
Table III. Results of the sufciency analysis.
Mw RJB
IM Slope p-value Slope p-valuePGA 0.930 9.06 107 0.0076
0.597PSA(T1) 0.988 9.52 107 0.0178 0.241PGV 0.482 3.15 104 0.0130
0.167PGD 0.029 0.764 0.0030 0.626IM, intensity measure; PGA, peak
ground acceleration; PGV, peak ground velocity; PGD, peak
grounddisplacement.
16 N. BURATTI AND M. TAVANO
Copyright 2013 John Wiley & Sons, Ltd. Earthquake Engng
Struct. Dyn. 2014; 43:121DOI: 10.1002/eqe
-
It is interesting to notice that the control nodes to which the
14 pseudo-equilibrium paths are referredto may change from one path
to the other. By looking at the position of the control nodes, we
foundthat for 12 out of 14 paths, the control node is located in
the upper-middle part of the tank, wherethe material is elastic; in
these cases, the failure mode is characterised by secondary
buckling. Forthe remaining two cases, it is associated to elephants
foot buckling, in fact, the control node islocated in the
middle-low part, where the material is yielded, and an outward
bulge has formed.
6 6.5 7 7.5 81.5
1
0.5
0
0.5
1
1.5
Mw
resid
uals
Slope: 0.93 pvalue: 9.06e7
0 5 10 15 20 251.5
1
0.5
0
0.5
1
1.5
RJB [km]
resid
uals
Slope: 0.01 pvalue: 5.97e1
a
b
Figure 19. Sufciency of peak ground acceleration (PGA) in terms
of moment magnitude (a) andJoynerBoore distance (b).
Table IV. The 14 spectrum-matching accelerograms used for
fragility analygis: earthquake and stationname, year, component,
moment magnitude, Mw and JoinerBoore distance, RJB. Earthquake and
station
names are as dened by the NGA project [50].
Earthquake name Station name Year Component MW RJB [km]
Irpinia, Italy Auletta 1980 N-S 6.90 9.52Northridge, CA, USA
Pacoima Dam (downstr) 1994 E-W 6.69 4.92Irpinia, Italy Auletta 1980
E-W 6.90 9.52Northridge, CA, USA LittlerockBrainard Can 1994 N-S
6.69 46.31Denali, Alaska R109 2002 E-W 7.90 42.99Whittier Narrows,
CA, USA Pasadena-CIT Kresge Lab. 1987 N-S 5.99 6.77Irpinia, Italy
Bagnoli Irpinio 1980 E-W 6.22 17.79Loma Prieta,CA, USA Gilroy Array
#1 1989 E-W 6.93 8.84San Fernando,CA, USA Old Seismo Lab 1971 N-S
6.61 21.5Whittier Narrows,CA, USA Pasadena-CIT Kresge Lab. 1987 E-W
5.99 6.77Northridge, CA, USA LA-Wonderland AVE 1994 E-W 6.69
15.11Irpinia, Italy Sturnio 1980 N-S 6.22 20.38Northridge, CA, USA
Pacoima Dam (downstr) 1994 N-S 6.69 4.92Northridge, CA, USA
LA-Grifth Park Observatory 1994 N-S 6.69 21.2
DYNAMIC BUCKLING AND SEISMIC FRAGILITY OF ANCHORED STEEL TANKS
17
Copyright 2013 John Wiley & Sons, Ltd. Earthquake Engng
Struct. Dyn. 2014; 43:121DOI: 10.1002/eqe
-
Furthermore, the average value of PGAcr is 0.348 g, so that we
can conclude that secondary bucklingshould be of great concern to
designers because it seems to be the dominant failure mode and it
occursat relatively low levels of PGA.
7.2.2. Fragility curves. The probability of failure in equation
(5) is essentially the denition of thecumulative density function
(CDF) for the random variable IMcr, that is, the critical values of
theground-motion IM under consideration. Therefore, it can be
expressed as
Pf P IMcr im FIMcr im (9)
Using the data in Table V, the empirical CDF can be computed for
each IM. The four empiricalCDFs obtained are plotted in Figure 20.
From this gure, it is immediate to notice that lessuncertainty is
associated to the buckling phenomenon if described in terms of PGD,
that is, the CDFin terms of PGD is the steepest one. On the
contrary, high uncertainty is associated to the dynamicbuckling
when described in terms of PSA.
Assuming a lognormal distribution for the random variables IM,
as commonly performed in theliterature [47, 57, 58], the cumulative
probability functions can be characterised by the rst two
Table V. Critical scale factors, SFcr, and Buckling loads in
terms of PGA, PSA(T1), PSV and PGD, for thetank subjected to 14
response-spectrum compatible accelerograms.
Accelerogram SFcr
PGAcr PSAcr PSVcr PGDcr
[g] [g] [m/s] [mm]
1 8.68 0.54 1.41 0.53 3202 8.26 0.43 0.78 0.53 7493 1.86 0.11
0.27 0.10 594 4.72 0.28 0.74 0.30 615 2.21 0.13 0.46 0.14 776 3.22
0.29 0.71 0.12 97 11.25 0.55 0.88 0.51 588 0.75 0.31 0.89 0.24 489
2.04 0.41 0.95 0.22 4910 5.26 0.59 1.03 0.42 5211 3.50 0.39 0.81
0.30 5012 2.80 0.22 0.77 0.12 2113 1.02 0.44 0.74 0.31 4614 1.13
0.18 0.34 0.15 27
PGA, peak ground acceleration.
PGA 0.1 1.00
0.2
0.4
0.6
0.8
T [s]PS
A [g
]
Target spectrumEC8 lower boundActual spectraMean spectrum[0.2
T1, 2T1]
Figure 20. Response spectra of the 14 selected accelerograms and
compatibility with the target spectrum inthe selected range of
periods.
18 N. BURATTI AND M. TAVANO
Copyright 2013 John Wiley & Sons, Ltd. Earthquake Engng
Struct. Dyn. 2014; 43:121DOI: 10.1002/eqe
-
moments. Once the mean and the standard deviation are known, it
is possible to compute the lognormalCDF. The so computed curves are
plotted in Figure 21 together with the empirical CDF, and also,
thecoefcient of variation is highlighted. From the gure, we can
notice that the analytical curves have agood t; this implies that
the lognormal distribution model is well-suited to the buckling
problem ofliquid-storage tanks.
8. CONCLUSIONS AND FUTURE WORK
In the present work, the seismic behaviour of liquid containing
cylindrical tanks was investigated usingthe added mass method in
order to simulate the uidstructure interaction. The added mass
wascomputed from the impulsive pressure distribution for rigid
tanks, and therefore, the added masswas constant during the
simulation. This approach is correct for broad tanks, where the
pressuredoes not change much depending on whether the tank is
assumed to be rigid or exible. The mainndings of the present paper
are listed in the succeeding text.
The pre-stress state due to the hydrostatic and hydrodynamic
pressures on the tank walls has alarge effect on shell-type modes,
and in particular, it reduces their periods, but it does not
haveimportant effects on the cantilever-type vibration modes (i.e.
modes characterised by a numberof circumferential waves n= 1) that
control the global response of the liquid-tank system.
Nonlinear dynamic analyses have shown that the added-mass model
allows to simulate two typesof buckling modes: elephants foot
buckling and secondary buckling. However, the dominantfailure mode
is the secondary buckling at the upper-middle part of the
shell.
Contrary to the elephants foot buckling, the secondary buckling
is an elastic buckling mode, butit is strongly inuenced by the
occurrence of plasticity in other parts of the structure.
The nite element model developed was used in order to
investigate the efciency and sufciency offour different
ground-motion IMs, that is, the PGA, peak ground velocity, PGD and
spectral accelera-tion at the natural period of the rst
cantilever-type natural mode. PGD has been found being the
mostefcient and sufcient IM as far as the maximum radial
displacement of the tank walls is concerned.
The average dynamic buckling load resulting from 14 analyses
using spectrum-compatibleaccelerograms corresponds to PGAcr = 0.35
g, so that the secondary buckling should be of greatconcern to the
designer, although not yet explicitly covered by current
standards.
Fragility curves, in terms of the attainment of a buckling limit
state, have been obtained, consid-ering the four aforementioned
IMs.
ACKNOWLEDGEMENTS
The authors acknowledge the nanical support of the Italian
Department of Civil Protection, ReLUIS20102013 project Task 2.2.3:
Industrial Plants, Nuclear Plants, and Lifelines.
0 0.5 1 1.5 20
0.2
0.4
0.6
0.8
1
P (IM
cr
im)
[ ])( [ ], [ ], [ ],im PGA g PSA g PGD m PGV m s
PGA, COV =0.35, COV =0.90
PGD, COV =0.20PGV, COV =0.26
( )11PSA mT =
Figure 21. Empirical and analytical (lognormal) fragility curves
for buckling in terms of the various intensitymeasures considered
in the present paper.
DYNAMIC BUCKLING AND SEISMIC FRAGILITY OF ANCHORED STEEL TANKS
19
Copyright 2013 John Wiley & Sons, Ltd. Earthquake Engng
Struct. Dyn. 2014; 43:121DOI: 10.1002/eqe
-
REFERENCES
1. Hamdan FH. Seismic behaviour of cylindrical steel liquid
storage tanks. Journal of Constructional Steel Research2000;
53(3):307333.
2. Veletsos AS, Shivakumar P. Dynamic response of tanks
containing liquids or solids, in Computer Analysis andDesign of
Earthquake Resistant Structures DE Beskos and SA Anagnostopoulos,
Editors, Computational Mechanics,Inc. 1997.
3. Rammerstorfer FG, Scharf K, Fisher FD. Storage Tanks Under
Earthquake Loading. Applied Mechanics Reviews1990;
43(11):261282.
4. Veletsos, AS. Seismic response and design of liquid storage
tanks in Guidelines for the Seismic Design of Oil andGas Pipeline
Systems. Committee on Gas and Liquid Fuel Lifelines of the ASCE
Technical Council on LifelineEarthquake Engineering, Editor, ASCE:
New York, 1984
5. Hunt B, Priestley MJN. Seismic water waves in a storage tank.
Bulletin of the Seismological Society of America1978;
68(2):487499.
6. Veletsos, AS, Yang JY. Earthquake response of liquid storage
tanks, in Advances in Civil Engineering throughEngineering
Mechanics - Second Annual Engineering Mechanics Division Specialty
Conference, ASCE: NorthCarolina State University, Raleigh, North
Carolina, U.S.A. 1977; 124.
7. Haroun MA, Housner GW. Earthquake response of deformable
liquid storage tanks. Journal of Applied Mechanics1981;
48(2):411417.
8. Housner GW. The dynamic behaviour of water tanks. Bulletin of
the Seismological Society of America, 1963; 53(1):381387.
9. Jacobsen LS. Impulsive hydrodynamics of uid inside a
cylindrical tank and of uid surrounding a cylindrical pier.Bulletin
of the Seismological Society of America 1949; 39(3):189204.
10. Graham EW, Rodriguez AM. The characteristics of fuel motion
which affect airplane dynamics. Journal of AppliedMechanics 1952;
19(3):381388.
11. Brown KJ, et al., Seismic performance of los angeles water
tanks, in Fourth U.S. Conference on Lifeline EarthquakeEngineering,
MJ ORourke, Editor : San Francisco. 1995, 668675.
12. Haroun MA. Behaviour of unanchored oil storage tanks:
imperial valley earhquake. Journal of Technical Topics inCivil
Engineering 1983; 109(1):2340.
13. ORourke MJ, So P. Seismic fragility curves for on-grade
steel tanks. Earthquake Spectra 2000;16(4):801815.14. Salzano E,
Iervolino I, Fabbrocino E. Seismic risk of atmospheric storage
tanks in the framework of quantitative risk
analysis. Journal of Loss Prevention in the Process Industries
2003; 16(5):403409.15. HAZUS. Earthquake loss estimation
methodology, National Institute of Building Sciences, prepared by
Risk
Management Solutions: Menlo Park, CA, USA, 1997.16. Fischer FD,
Rammerstorfer FG. A rened analysis of sloshing effects in
seismically excited tanks. International
Journal of Pressure Vessels and Piping 1999; 76(10):693709.17.
Zienkiewicz OC, Taylor RL, Nithiarasu P. The nite element method
for uid dynamics. 6th ed ed2005, Amsterdam ;
London: Elsevier Butterworth-Heinemann. xii, 435 p., [6] p. of
plates.18. Zienkiewicz OC, Taylor RL. The nite element method for
solid and structural mechanics. 6th ed2005, Oxford ;
Burlington, MA: Elsevier Butterworth-Heinemann. xv, 631 p., [4]
p. of plates.19. Westergaard HM. Water pressures on dams during
earthquakes. Transactions of the American Society of Civil
Engineers 1933; 98:418433.20. Virella JC, LE Suarez, Godoy LA.
Effect of pre-stress states on the impulsive modes of vibration of
cylindrical tank-
liquid systems under horizontal motions. Journal of Vibration
and Control 2005; 11(9):11951220.21. Kim MK, et al. Seismic
analysis of base-isolated liquid storage tanks using the BEFEBE
coupling technique. Soil
Dynamics and Earthquake Engineering 2002; 22(912):11511158.22.
Gingold RA, Monaghan JJ. Kernel estimates as a basis for general
particle methods in hydrodynamics. Journal of
Computational Physics 1982; 46(3):429453.23. Gingold RA,
Monaghan JJ. Smoothed particle hydrodynamics - theory and
application to non-spherical stars.
Monthly Notices of the Royal Astronomical Society 1977;
181:375389.24. Virella JC, Godoy LA, Surez LE. Dynamic buckling of
anchored steel tanks subjected to horizontal earthquake
excitation. Journal of Constructional Steel Research 2006;
62:521531.25. Hibbit HD, Karlsson BI, Soresen P. ABAQUS Standard
Users Manual, 2002.26. Hibbit HD, Karlsson BI, Soresen P. ABAQUS
Theory Users Manual, 2002.27. Budiansky B, Roth RS. Axisymmetric
dynamic buckling of clamped shallow spherical shells, in Collected
Papers on
Instability of Shell Structures (TN-D-1510), NASA, 1962
597606.28. Budiansky B. Dynamic Buckling of Elastic Structures:
Criteria and Estimates, G Herrmann, Editor, Pergamon Press:
Oxford, 1967, 83106.29. European Committee for Standardization -
CEN. Eurocode 8: design of structures for earthquake resistance -
Part 4:
silos, tanks and pipelines, 2006.30. Priestley MJN, et al.
Seismic design of storage tanks. Recommendations of a Study Group
of the New Zealan
National Society for Earthquake Engineering, 1986.31. API.
Welded Tanks for Oil Storage, 2008.32. Rotter MJ. Local collapse of
axially compressed pressurized thin shell cylinders. Journal of
Structural Engineering
1990; 116(7): 19551970.
20 N. BURATTI AND M. TAVANO
Copyright 2013 John Wiley & Sons, Ltd. Earthquake Engng
Struct. Dyn. 2014; 43:121DOI: 10.1002/eqe
-
33. European Convention for Constructional Steelwork (ECCS).
Buckling of Steel Shells - European Recommendations(4th Edition),
ECCS: Brussels, Belgium, 1988.
34. Tavano M. Seismic response of tank-uid systems: state of the
art review and dynamic buckling analysis of a steeltank with the
addedd mass method, in Department of Civil, Environmental and
Materials Engineering, University ofBologna, 2012.
35. Lee GC, Tsai CS. Time-domain analyses of dam-reservoir
system. I exact solution. Journal of EngineeringMechanics 1991;
117(9):19902006.
36. Tsai CS, Lee GC. Time-domain analyses of dam-reservoir
system. II substructure method. Journal of EngineeringMechanics
1991; 117(9):20072026.
37. De Angelis M, Giannini R, Paolacci F. Experimental
investigation on the seismic response of a steel liquidstorage tank
equipped with oating roof by shaking table tests. Earthquake
Engineering and Structural Dynamics2010; 39(4):377396.
38. Shrimali MK, Jangid RS. Seismic response of base-isolated
liquid storage tanks. JVC/Journal of Vibration andControl 2003;
9(10):12011218.
39. Shrimali MK, Jangid RS. Seismic response of liquid storage
tanks isolated by sliding bearings. EngineeringStructures 2002;
24(7):909921.
40. Virella JC, Godoy LA, Surez LE. Fundamental modes of
tank-liquid systems under horizontal motions. EngineeringStructures
2006; 28: 14501461.
41. Malhotra PK. Practical nonlinear seismic analysis of tanks.
Earthquake Spectra 2000; 16(2):473492.42. Virella JC, Surez LE,
Godoy LA A static nonlinear procedure for the evaluation of the
elastic buckling of anchored
steel tanks due to earthquakes. Journal of Earthquake
Engineering 2008; 12(6):9991022.43. Sun J, Zhang R, Zhang L.
Investigation on seismic vulnerability of vertical storage tanks
based on probability
estimate method. World Information on Earthquake Engineering
2009; 25(1):3742.44. Krausmann, E, AM Cruz, Affeltranger B, The
impact of the 12 May 2008 Wenchuan earthquake on industrial
facilities. Journal of Loss Prevention in the Process Industries
2010; 23(2):242248.45. Tanov R, Tabiei A, Simitses GJ. Effect of
static preloading on the dynamic buckling of laminated cylinders
under
sudden pressure. Mechanics of Composite Materials and Structures
1999; 6(3):195206.46. Iervolino I, Fabbrocino G, Manfredi G,
Fragility of standard insutrial structures by a response surface
based method.
Journal of Earthquake Engineering 2004. 8(6):927945.47.
Talaslidis DG, et al., Risk analysis of industrial structures under
extreme transient loads. Soil Dynamics and
Earthquake Engineering 2004. 24(6):435448.48. Tothong P Luco N,
Probabilistic seismic demand analysis using advanced ground motion
intensity measures.
Earthquake Engineering and Structural Dynamics 2007;
36(13):18371860.49. Baker JW Vector-valued ground motion intensity
measures for probabilistic seismic demand analysis, in
Department
of Civil and Environmental Engineering, University of Stanford:
Sanford, CA, U.S, 2005.50. Power M, et al. An overview of the NGA
project. Earthquake Spectra 2008. 24(1):321.51. Buratti N, Stafford
PJ Bommer JJ. Earthquake accelerogram selection and scaling
procedures for estimating the
distribution of drift response. Journal of Structural
Engineering 2011; 137(3):345357.52. Baker JW. Quantitative
classication of near-fault ground motions. Bulletin of the
Seismological Society of America
2007; 97(5):14861501.53. Boore DM, Bommer JJ. Processing of
strong-motion accelerograms: needs, options and consequences.
Soil
Dynamics and Earthquake Engineering 2005; 25(2):93115.54.
Buratti, N. A comparison of the performances of various
groundmotion intensity measures, in 15th World
Conference on Earthquake Engineering, Lisbon, Portugal, 2012.55.
Italian Ministry of Infrastructures. Norme Tecniche per le
Costruzioni (Building Code), 2008.56. Bommer JJ, Acevedo AB. The
use of real earthquake accelerograms as input to dynamic analysis.
Journal of
Earthquake Engineering, 2004. 8(Special Issue 1):4391.57.
Cornell CA, et al. Probabilistic basis for 2000 SAC federal
emergency management agency steel moment frame
guidelines. Journal of Structural Engineering 2002;
128(4):526533.58. Buratti N, Ferracuti B, Savoia M. Response
surface with random factors for seismic fragility of reinforced
concrete
frames. Structural Safety 2010; 32(1):4251.
DYNAMIC BUCKLING AND SEISMIC FRAGILITY OF ANCHORED STEEL TANKS
21
Copyright 2013 John Wiley & Sons, Ltd. Earthquake Engng
Struct. Dyn. 2014; 43:121DOI: 10.1002/eqe