Embed Size (px)
Citation preview

102102102102102 QR of RTRI, Vol. 50, No. 2, May. 2009
PAPERPAPERPAPERPAPERPAPER
TTTTTechniques to Measure Effects of Passing Techniques to Measure Effects of Passing Techniques to Measure Effects of Passing Techniques to Measure Effects of Passing Techniques to Measure Effects of Passing Trains on Dynamic Pressure Applied torains on Dynamic Pressure Applied torains on Dynamic Pressure Applied torains on Dynamic Pressure Applied torains on Dynamic Pressure Applied toSleeper Bottoms and Dynamic Behavior of Ballast StonesSleeper Bottoms and Dynamic Behavior of Ballast StonesSleeper Bottoms and Dynamic Behavior of Ballast StonesSleeper Bottoms and Dynamic Behavior of Ballast StonesSleeper Bottoms and Dynamic Behavior of Ballast Stones
1. Introduction1. Introduction1. Introduction1. Introduction1. Introduction
Conventional ballast on ballasted tracks comprisesan assemblage of irregularly shaped ballast particles,each subject to minor frictional phenomena includingvibration, rotation, slippage, grinding and crushingcaused by repeated dynamic and impact loads from pass-ing high-speed trains. The cumulative effect of thesephenomena over long periods causes localized and un-even plastic deformation inside the ballast aggregate,which gives rise to track irregularities through trackdeterioration. It is important to understand the mecha-nisms behind track deterioration in order to reduce trackmaintenance costs and rebuild existing track structureswhile retaining a certain level of ride comfort [1]. Theballast layer as addressed in precedent studies as a con-tinuous structure, but in fact it is fundamentally a dis-continuous one. Moreover, its deformation and failuremechanisms remain unexplained. It is essential to es-tablish reasonable methods for measurement and analy-sis to elucidate such mechanisms.
By assuming the ballast structure as an assemblageof arbitrarily shaped ballast particles, the phenomenonof the inner plastic deformation process of ballast re-lated to track deterioration is conceivable as being gov-erned by the dynamic characteristics of the discrete ag-gregate of ballast particles forming a skeletal structure.An effective way of investigating the mechanism behindballast deterioration caused by running loads is there-fore to reproduce the behavior of particles subjected todynamic and impact loads from running trains by ap-
plying a discontinuous numerical model to simulate themicrostructure and micro-profiles of particle assemblage.
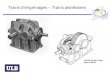
Figure 1 shows an outline of the ballasted track de-terioration model using discontinuous analysis. A three-dimensional dynamic model of a discontinuous structurewas created to reproduce an assemblage composed ofballast particles in detail [2]. Applying the three-dimen-sional distinct element method to this model [3] enabledthe implementation of dynamic response analysis forstructural elements of the track against running trainloads [4, 5]. Consequently, the above-described dynamicmodel of a discontinuous structure, which minutely re-produces an assemblage of particles, enables quantita-
Akira AIKAAkira AIKAAkira AIKAAkira AIKAAkira AIKAWWWWWA, DrA, DrA, DrA, DrA, Dr. Eng.. Eng.. Eng.. Eng.. Eng.Senior Researcher,
Track Dynamics, Railway Dynamics Division
This paper describes two newly developed techniques. The first measures the dynamicpressure distribution on sleeper bottoms induced by running trains with frequencies ashigh as several thousand Hertz using a special sensing sleeper equipped with ultra-thinimpact force sensors. This sensing unit consists of a concrete sleeper fitted with a largenumber of sensors. Attached to the sleeper’s whole undersurface is a solid mass made upof 75 thin impact force sensors using piezoelectric film (PVDF). The second technique en-ables measurement of the three-dimensional (3D) motion of existing ballast stone using aspecial sensing stone containing piezoresistive triaxial acceleration sensors that can de-tect frequencies as high as approximately 1 kHz. To achieve this, two accelerometer chipsare embedded separately in crushed stone. The average value of the two acceleration mea-surements indicates the translational acceleration, and the difference between them yieldsthe rotational acceleration. We tested these sensory performances in a full-scale field ex-periment performed on a railway line. The results confirmed that the newly developedtechniques are beneficial for measuring dynamic interaction within the boundary layerbetween a sleeper and an assemblage of ballast grains, and for assessing 3D ballast mo-tion.
KeywordsKeywordsKeywordsKeywordsKeywords: conventional ballasted track, deterioration, pressure on sleeper bottom, impactforce sensor, piezoelectric film, piezoresistive triaxial accelerating sensor, 3Dmotion of ballast particle
Fig. 1 Outline of the ballasted track deterioration modelFig. 1 Outline of the ballasted track deterioration modelFig. 1 Outline of the ballasted track deterioration modelFig. 1 Outline of the ballasted track deterioration modelFig. 1 Outline of the ballasted track deterioration modelusing discontinuous analysisusing discontinuous analysisusing discontinuous analysisusing discontinuous analysisusing discontinuous analysis
Repeated dynamic and impact loads from high-speed trains
Normal forceand
Frictional force
Assemblage of arbitrarily shaped ballast particles
Ballast
Rails
Sleeper

103103103103103QR of RTRI, Vol. 50, No. 2, May. 2009
tive assessment of rotation, frictional slippage and othercomplicated behaviors specific to particles. It also repro-duces the contact force among particles and the internalstress and movement history of ballast particles, whichare not normally observable or measurable in tests. It istherefore possible to quantitatively evaluate the dynamicperformance, deformation features, energy dissipationcharacteristics and frequency dependency of ballast par-ticles based on the results of numerical analysis. Theseresults will be reflected in validity evaluation of coun-termeasures against ballasted track deterioration.
In constructing and verifying a ballast track dete-rioration model through the application of a three-di-mensional discontinuous physical model, it is indispens-able to accurately measure the dynamic behavior of bal-last stone on a real track and to clarify related phenom-ena. Moreover, better parameter identification for thebehavior of rails, sleepers and ballast stone under ac-tual loading conditions during train passage is essentialin order to ensure the effectiveness of discontinuousanalysis. Therefore, to enable measurement of the dy-namic load transfer characteristics at contact pointswithin the boundary layer between the sleeper bottomand the assemblage of ballast grains, a sensing sleeperwas developed featuring a large number of thin impactforce sensors attached to the whole undersurface [6]. Tomeasure the three-dimensional (3D) motion of actualballast stones related to both translational accelerationand rotational acceleration, a sensing stone incorporat-ing two piezoresistive triaxial accelerating sensors wasalso developed [7]. This paper describes the principlesof these techniques in detail, along with field experimentsaimed at evaluating their applicability.
2. Structure and specifications of the sensing sleeper2. Structure and specifications of the sensing sleeper2. Structure and specifications of the sensing sleeper2. Structure and specifications of the sensing sleeper2. Structure and specifications of the sensing sleeper
2.1 Development of ultra-thin impact force sensors2.1 Development of ultra-thin impact force sensors2.1 Development of ultra-thin impact force sensors2.1 Development of ultra-thin impact force sensors2.1 Development of ultra-thin impact force sensors
From among the various types of load sensor avail-able, a sheet-type impact force sensor [8] was adoptedfor this study. Its main body consists of piezoelectric film(PVDF), silicone rubber and solid cover plates, as shownin Fig. 2, with consideration of the following conditions:capability of measuring the total force acting on a plane;capability of measuring forces of up to 10 kN over anarea measuring 8 × 8 cm; capability of measuring dy-namic loads on high-frequency components from low fre-quency up to several thousand Hertz; and a thickness of2 cm or less to enable attachment to the sleeperundersurface.
Each impact force sensor has a main body and covermembers. The unit’s main body, measuring 6 cm wide, 6cm long and 4 mm thick, is made from PVDF and sili-cone rubber, and has metal plates on both of its surfaces.The cover members comprise solid cover plates of twotypes: a front cover plate (8 cm × 8 cm × 5 mm) and aback cover plate (6 cm × 6 cm × 1 cm). The front coverplate transmits impact forces to the main body througha mechanism of multi-contact loading that preventsbreakage of the sensor itself as a result of impact loads.The back cover plate, which has a screw hole in each of
its four corners, fixes the sensor firmly to the sleeper. A2-cm-wide space in the back of the front cover plate isprovided for wiring. The performance of all the impactforce sensors was examined through a load test using animpulse hammer (5 kN maximum load), and a calibra-tion value was calculated for each.
2.2 Design and fabrication of a thin PC3-type concrete2.2 Design and fabrication of a thin PC3-type concrete2.2 Design and fabrication of a thin PC3-type concrete2.2 Design and fabrication of a thin PC3-type concrete2.2 Design and fabrication of a thin PC3-type concretemono-block sleepermono-block sleepermono-block sleepermono-block sleepermono-block sleeper
As the 2-cm-thick impact force sensors are attachedto the sleeper’s undersurface, despite being thinner thanthe conventional product at 2 cm, a sleeper with a levelof sensitivity comparable to that of the conventional prod-uct was designed and manufactured as shown in Fig. 3.A total of 75 impact force sensors were attached withoutmutual clearance to the whole undersurface in a 25 × 3matrix arrangement, thereby forming a solid structure.After all the sensors were fixed in exact positions on a 5-mm-thick metal unit board conforming to the sleeperundersurface size, the board was fixed to the sleeperundersurface. The sleeper’s sensory and safety perfor-
Fig. 2 The ultra-thin impact force sensor using piezo-Fig. 2 The ultra-thin impact force sensor using piezo-Fig. 2 The ultra-thin impact force sensor using piezo-Fig. 2 The ultra-thin impact force sensor using piezo-Fig. 2 The ultra-thin impact force sensor using piezo-electric filmelectric filmelectric filmelectric filmelectric film
4 mmMain body of sensor
Back cover plate
Front cover plate
6 cm8 cm
6 cm8 cm
Fig. 3 Design and fabrication of the thin PC3-type concreteFig. 3 Design and fabrication of the thin PC3-type concreteFig. 3 Design and fabrication of the thin PC3-type concreteFig. 3 Design and fabrication of the thin PC3-type concreteFig. 3 Design and fabrication of the thin PC3-type concretemono-block sleepermono-block sleepermono-block sleepermono-block sleepermono-block sleeper
Impact force sensors
Side face
Bottom face

104104104104104 QR of RTRI, Vol. 50, No. 2, May. 2009
mance levels were also confirmed beforehand throughan insulation resistance test, a laboratory strength test[9] and a running experiment on a test railway track.
2.3 Design and fabrication of a passive-type integrated2.3 Design and fabrication of a passive-type integrated2.3 Design and fabrication of a passive-type integrated2.3 Design and fabrication of a passive-type integrated2.3 Design and fabrication of a passive-type integratedcircuitcircuitcircuitcircuitcircuit
The sensor consists of thin metal plates attached toboth sides of a thin piezo film, giving the same structureas an electric-circuit condenser. As there is no internalresistance structure, no current induced by noise sourcesoccurs even in the high-tension environment of trainoperation, thus enabling high-quality load measurement.Although a charge proportional to the impact load isoutput from both terminals, the digitization of chargeoutput is extremely difficult. Accordingly, the chargefrom the sensor is usually converted into a voltage bythe integration circuit attached to a sensor output ter-minal (charge amp). An impedance transformation cir-cuit using a high-impedance OP amplifier, for example,is sufficient. As this sensor also has good reactivity andthe output voltage is as large as several tens of volts, apassive integration circuit consisting of one film-typecondenser (4.4 µF) using no utility power (as shown inFig. 4) was adopted. Although this type of circuit cannotmeasure a direct current component, its linearity in the0.1 − 10-kHz frequency range was confirmed by numeri-cal simulation using an equivalent circuit and by con-ducting a dynamic loading test in the laboratory. It isconsidered to offer sufficient measurement performanceto enable track measurement.
Fig. 4 Passive-type integration circuit with a single film-Fig. 4 Passive-type integration circuit with a single film-Fig. 4 Passive-type integration circuit with a single film-Fig. 4 Passive-type integration circuit with a single film-Fig. 4 Passive-type integration circuit with a single film-type condensertype condensertype condensertype condensertype condenser
Impact force sensor
C=4.4 FFilm-type condenser
Data recorderCoaxial cable
Coaxial cable
3. Dynamic-load measurement test using a sensing3. Dynamic-load measurement test using a sensing3. Dynamic-load measurement test using a sensing3. Dynamic-load measurement test using a sensing3. Dynamic-load measurement test using a sensingsleeper on an existing railway linesleeper on an existing railway linesleeper on an existing railway linesleeper on an existing railway linesleeper on an existing railway line
3.1 Measurement outline3.1 Measurement outline3.1 Measurement outline3.1 Measurement outline3.1 Measurement outline
A full-scale field experiment for measurement at arail weld on a revenue-service railway line was performedto evaluate the sensing sleeper ’s applicability and toclarify actual phenomena. The authors measured thepressure distribution on the bottom surface of the sleeperinduced by a running train. Figure 5 depicts the track-site installation, which was conducted in 2007 on astraight section with 60-kg/m continuously welded railover PC3-type concrete mono-block sleepers laying on300-mm-thick ballast-bed over firmly tightened sandysoil ground on the conventional railway line in Japan.The size and method of installation for the sensingsleeper were the same as those for existing sleepers. Inthe installation process, therefore, after the existingsleeper was replaced with the sensing sleeper (which wasthen fixed with the usual fastening device), the work was
completed easily by simply tamping and trimming theballast.
3.2 Load distribution from axle passage3.2 Load distribution from axle passage3.2 Load distribution from axle passage3.2 Load distribution from axle passage3.2 Load distribution from axle passage
Figure 6 presents an example of the results of mea-surement on the sleeper bottom to determine the dynamicpressure imparted by the first axle on the lead coachbogie of a passenger express train traveling at 90 km/hthrough the measurement section. The figure shows therelationship between the wheel position and the two-di-mensional load distribution characteristics on the sleeperbottom; the first axle arrives at the edge by the sleeper’sfront side and moves over the sleeper top before passingover the opposite edge of the sleeper. As shown in thefigure, a tendency exists by which the dynamic runningload is not equally distributed throughout the sleeperundersurface − the values vary greatly by location, withlarge loads concentrated locally at specific points.
Fig. 5 TFig. 5 TFig. 5 TFig. 5 TFig. 5 Track-site installationrack-site installationrack-site installationrack-site installationrack-site installation
Fig. 6 Example of measured results for dynamic pressureFig. 6 Example of measured results for dynamic pressureFig. 6 Example of measured results for dynamic pressureFig. 6 Example of measured results for dynamic pressureFig. 6 Example of measured results for dynamic pressureon the sleeper bottomon the sleeper bottomon the sleeper bottomon the sleeper bottomon the sleeper bottom
t = 0 ms t = 3 ms t = 6 ms t = 9 ms
1.5 [kN]
1.0
0.5
0
Wheel position
SensorNo.4
Rails
3.3 T3.3 T3.3 T3.3 T3.3 Time history response of dynamic pressure on theime history response of dynamic pressure on theime history response of dynamic pressure on theime history response of dynamic pressure on theime history response of dynamic pressure on thesleeper bottomsleeper bottomsleeper bottomsleeper bottomsleeper bottom
Figure 7 presents the measured time history responsewaveforms of dynamic pressure on the sleeper bottom ofsensor No. 4, where the load peak value was the largestamong all sensors by axle passage. The dotted line inthe figure represents the time (t = 1.0297 s, t =1.1131 s)at which the first axle and the second axle of the leadcoach bogie passed immediately above the sleeper cen-ter, respectively. As the figure shows, load peaks of 1.0 −1.5 kN appeared near the time at which the axles passedimmediately above the sleeper’s center.
Figure 8 presents the measured time history response

105105105105105QR of RTRI, Vol. 50, No. 2, May. 2009
waveforms for the total value of dynamic pressure onthe sleeper bottom regarding all 75 sensors. In this mea-surement, the maximum value of the load sum was only29 kN, which corresponded to about 40% of the rail sheetforce. This was thought to be due to the fact that a minutegap on the sleeper underside may have opened up be-cause the subgrade at the measuring site was slightlylooser and several weeks had passed between the instal-lation and the measurement work.
3.4 Peak magnitude distribution at the time of axle3.4 Peak magnitude distribution at the time of axle3.4 Peak magnitude distribution at the time of axle3.4 Peak magnitude distribution at the time of axle3.4 Peak magnitude distribution at the time of axlepassagepassagepassagepassagepassage
Figure 9 depicts the peak-magnitude distribution inthe time history of dynamic pressure on the sleeper bot-tom for all sensors in the short time during which thewheel moves over the sleeper top. The results show thatthe dynamic loads acting on the sleeper bottom are notsupported uniformly over the sleeper underside. Theyvary greatly in relation to location, and are concentratedat specific contact points.
Fig. 7 Measured time history response waveforms ofFig. 7 Measured time history response waveforms ofFig. 7 Measured time history response waveforms ofFig. 7 Measured time history response waveforms ofFig. 7 Measured time history response waveforms ofdynamic pressure on the sleeper bottom for sensordynamic pressure on the sleeper bottom for sensordynamic pressure on the sleeper bottom for sensordynamic pressure on the sleeper bottom for sensordynamic pressure on the sleeper bottom for sensorNo. 4No. 4No. 4No. 4No. 4
Fig. 8 Measured time history response waveforms forFig. 8 Measured time history response waveforms forFig. 8 Measured time history response waveforms forFig. 8 Measured time history response waveforms forFig. 8 Measured time history response waveforms forthe total value of dynamic pressure on the sleeperthe total value of dynamic pressure on the sleeperthe total value of dynamic pressure on the sleeperthe total value of dynamic pressure on the sleeperthe total value of dynamic pressure on the sleeperbottombottombottombottombottom
0.95 1.00 1.05 1.10 1.15 1.20-0.5
0.0
0.5
1.0
1.5
2.0
Forc
e on
sle
eper
bot
tom
(kN
)
Time (s)
0.95 1.00 1.05 1.10 1.15 1.20-5
0
5
10
15
20
25
30
Tota
l for
ce o
n sl
eepe
r bot
tom
(kN
)
Time (s)
Fig. 9 Peak magnitude distribution at the time of axleFig. 9 Peak magnitude distribution at the time of axleFig. 9 Peak magnitude distribution at the time of axleFig. 9 Peak magnitude distribution at the time of axleFig. 9 Peak magnitude distribution at the time of axlepassagepassagepassagepassagepassage
4. Structure and specifications of a 3D sensing stone4. Structure and specifications of a 3D sensing stone4. Structure and specifications of a 3D sensing stone4. Structure and specifications of a 3D sensing stone4. Structure and specifications of a 3D sensing stone
4.1 Background to the development of the sensing stone4.1 Background to the development of the sensing stone4.1 Background to the development of the sensing stone4.1 Background to the development of the sensing stone4.1 Background to the development of the sensing stone
Conventional techniques for railway ballast vibrationmeasurement using uniaxial accelerating sensors havebeen widely employed to measure ballast stone behaviorin relation to running trains [e.g., 10]. Recently, methodsusing triaxial accelerating sensors have also been adopted[e.g., 11]. However, the information output from a con-ventional uniaxial accelerating sensor is limited to accel-eration measurement values with respect to a specificdirection. Such sensors cannot specify the direction inwhich the measurement axis has turned, nor can theydetect the three-dimensional motion of ballast stone. Fur-thermore, with uniaxial accelerating sensors, the sensoritself moves and rotates with regular track maintenancework, creating problems related to shifting from the ini-tially planned installation angle.
In considering ballast track’s structural discontinu-ity, the rotational motion of ballast particles is an impor-tant factor affecting the failure advance phenomena forthe ballast overall. Accordingly, the development of tech-niques to measure the 3D motion of ballast particles withrespect to their rotational and translational motion isimportant in elucidating railway ballast deteriorationbehavior and improving parameter estimation. However,no studies have so far been reported on measurement ofthe rotational behavior of ballast stones.
In this study, new techniques were developed to mea-sure the three-dimensional (3D) motion of actual ballaststones in relation to both translational acceleration androtational acceleration. The following describes the prin-ciples of the 3D sensing stone developed, the preparationof its prototype, and full-scale field experiments to evalu-ate the technique’s applicability.
4.2 Specifications of the piezoresistive triaxial accele-4.2 Specifications of the piezoresistive triaxial accele-4.2 Specifications of the piezoresistive triaxial accele-4.2 Specifications of the piezoresistive triaxial accele-4.2 Specifications of the piezoresistive triaxial accele-rating sensorsrating sensorsrating sensorsrating sensorsrating sensors
A piezoresistive triaxial acceleration sensor uses thesemiconductor piezoresistance effect to detect accelera-tion. Strain is produced within a semiconductor’s crys-tal lattice when a mechanical external force is appliedto it; the semiconductor piezoresistance effect is the phe-nomenon by which the resistance value changes by car-rier number and mobility as the semiconductor changes.
The sensor used in this study has an intricate inte-rior trussed structure that includes supports, a weightand beams produced by dry etching of a silicon substrateusing microelectromechanical system (MEMS) tech-niques. The beam member is transformed in proportionto acceleration when acceleration affects the structure’sweight. This is the mechanism by which the resistancevalue at the piezoresistance part changes.
Figure 10 shows a photograph of a piezoresistivetriaxial acceleration sensor chip (H48D; Hitachi Metals,Ltd.) that can detect acceleration up to 100 m/s2 in threeaxial directions (X, Y and Z) simultaneously with a singleunit. It is small and thin (4.8 mm × 4.8 mm × 1.5 mm),and its internal circuit has bridge circuits for three axialacceleration sensors, their instrumentation amplifiers,
Force sensors
RailsPC3-type sleeper
: Front sensors : Center sensors : Back sensors
Peak
forc
e m
agni
tude
(kN
)
Distance from sleeper end (mm)
A B C1.61.41.21.00.80.60.40.20.0
0 500 1000 1500 2000

106106106106106 QR of RTRI, Vol. 50, No. 2, May. 2009
a temperature sensor, and temperature drift correctioncircuits. Its standard sensitivity is 90 mV/G, it functionsup to a frequency of several hundred Hertz, and it canalso detect inclination. As its electric power consump-tion is low and it contains no moving parts, it is not dam-aged by external forces or exothermic reactions evenwhen sealed and enclosed in crushed stone ballast un-der severe conditions.
4.3 Principles of the 3D sensing stone4.3 Principles of the 3D sensing stone4.3 Principles of the 3D sensing stone4.3 Principles of the 3D sensing stone4.3 Principles of the 3D sensing stone
The following describes the structure and operationprinciples of the 3D sensing stone. Figure 11 shows twotriaxial accelerating sensor chips (Sensor A and SensorB) embedded separately in a ballast stone and placeddiagonally with respect to a rectangular parallelepiped.In the following descriptions, it is assumed for simplifi-cation that the two accelerometer chips are set in mutu-ally parallel and symmetrical positions, that accelera-tion evaluation is conducted at the mid-point betweenthe sensors, and that the acceleration evaluation pointis situated at the rectangular parallelepiped’s center ofgravity.
When both translational and rotational motion acton this rectangular parallelepiped, different accelera-tions in proportion to each type of motion occur in eachsensor. Accordingly, a voltage proportional to the accel-eration value is also detected at each sensor axis, andthe average value (αx, αy, αz) and the difference (βx, βy,βz) between the two acceleration measurement values areobtained for each axis. The average value of the two ac-celeration measurement values indicates the transla-tional acceleration of the center of gravity; the differ-ence between them yields the rotational acceleration.
Accordingly, calculating the mean value and the de-viation values of the two acceleration measurement re-sults with respect to the two sensors enables simple andsimultaneous measurement of translational and rota-tional acceleration in three axial directions using the3D sensing stone. Although the translational accelera-
Fig. 10 Piezoresistive triaxial acceleration sensorFig. 10 Piezoresistive triaxial acceleration sensorFig. 10 Piezoresistive triaxial acceleration sensorFig. 10 Piezoresistive triaxial acceleration sensorFig. 10 Piezoresistive triaxial acceleration sensor
10 mm0 5 10 mm0 5 10 mm0 5
Fig. 1Fig. 1Fig. 1Fig. 1Fig. 11 Principle of 3D sensing stone1 Principle of 3D sensing stone1 Principle of 3D sensing stone1 Principle of 3D sensing stone1 Principle of 3D sensing stone
Ballast stone
Sensor A
Sensor B
Lz
Ly
Lx
X1 X2
Y1Y2
Z1 Z2L
tion components (αx, αy, αz) and rotational accelerationcomponents (βx, βy, βz) are expressed using the accelera-tion unit (m/s2), the standardized rotational components(γx, γy, γz), which are divided by the distance between thesensors, are expressed in units of radians per secondsquared (rad/s2). The measurement acceleration valuesin each axial direction at rest are proportional to thegravitational acceleration of each axis on the gravity axis.
4.4 Confirmation of acceleration sensor chip sensitivity4.4 Confirmation of acceleration sensor chip sensitivity4.4 Confirmation of acceleration sensor chip sensitivity4.4 Confirmation of acceleration sensor chip sensitivity4.4 Confirmation of acceleration sensor chip sensitivity
The acceleration sensor chip outputs 90 mV/G as astandard feature when the source voltage is 3 V. How-ever, because of slight individual specificity and axialdifferences related to the sensitivity of the output volt-age, the sensitivity of individual sensors was examinedexperimentally beforehand. Choosing a pair with simi-lar sensitivity from among the sensors available providesoptimal function in the sensing stone. The two sensorswith the closest sensitivity were therefore selected foroperation as a complementary pair in the sensing stoneused for this study.
To confirm acceleration sensor chip sensitivity, afterthe chip was fixed on the reciprocating block slider crankmechanism (consisting of a 10-cm-diameter brass wheelchamber with a 0.53-m connecting rod), the sensor out-put voltage and the motor’s rotational speed measuredby the encoder were obtained simultaneously. It was con-firmed that the sensor output value demonstrated a goodlevel of linearity with the real acceleration value obtainedfor the motor’s rotational speed, and that satisfactorymeasurement performance was achieved for frequenciesas high as almost 1 kHz.
4.5 Production of a 3D sensing stone prototype4.5 Production of a 3D sensing stone prototype4.5 Production of a 3D sensing stone prototype4.5 Production of a 3D sensing stone prototype4.5 Production of a 3D sensing stone prototype
This section describes the preparation of a 3D sens-ing stone prototype. In the above-described 3D sensingstone, two acceleration sensors were situated on a rect-angular parallelepiped. However, it is sufficient to con-sider only the core portion, including the two accelera-tion sensors, in the structure of a rectangular parallel-epiped to create an actual 3D sensing stone. Two accel-erometer chips constituting a complementary pair wereembedded separately in the core part of the ballast stone,but were placed in mutually parallel and symmetricalpositions with respect to a certain inclination.
The wiring for the electric power supply, sensor con-trol and data input/output was performed using two ac-celeration sensor chips. Three-terminal semiconductorregulators for the low-power type and noise filters usinga toroidal core were installed for the electric power line.As the sensor chips’ driving voltage is low at 3 V, aslightly high voltage was supplied from outside the sen-sor in consideration of the voltage drop in the extensioncord used for the power supply. A constant voltage of 3V without noise was thus achieved inside the sensingstone.
A digital direction sensor chip [12] was built in thecore part of the ballast stone to output an installationazimuth angle of a 1-degree unit for every 0.1 s, althoughthis was inferior to the acceleration sensor in terms of

107107107107107QR of RTRI, Vol. 50, No. 2, May. 2009
accuracy. To ensure waterproofing and structural integ-rity, the internal void in the core part of the ballaststone’s 3D motion sensor was filled completely and en-closed in epoxy resin for concrete.
5. Field experiment to measure ballast stone 3D motion5. Field experiment to measure ballast stone 3D motion5. Field experiment to measure ballast stone 3D motion5. Field experiment to measure ballast stone 3D motion5. Field experiment to measure ballast stone 3D motion
5.1 Field experiment5.1 Field experiment5.1 Field experiment5.1 Field experiment5.1 Field experiment
A full-scale field experiment for measurement at arail weld on a commercial service railway line was per-formed to evaluate the stone sensor’s applicability. First,ballast renewal and trimming were conducted on a 25-mstraight section on the conventional railway line in Ja-pan in 2006. Four months later, the 3D motion sensorprototype was embedded in the ballast at a depth of 150mm under a PC3-type concrete mono-block sleeper bear-ing a 60-kg/m continuously welded rail over a 300-mm-thick ballast-bed of macadam on firmly tightened sandysoil ground. Figure 12 shows the installation situationof the ballast sensor presumed from the built-in azimuthsensor’s output value. The figure depicts the track’s ver-tical section as viewed from the sleeper side, with trainsrunning from right to left.
Fig. 12 Installation situation of the ballast sensorFig. 12 Installation situation of the ballast sensorFig. 12 Installation situation of the ballast sensorFig. 12 Installation situation of the ballast sensorFig. 12 Installation situation of the ballast sensor
ZSensor A
Sensor B
Sleeper Ballast
Running directionRail weld
Side face of rails
5.2 Acceleration components of the gravitational5.2 Acceleration components of the gravitational5.2 Acceleration components of the gravitational5.2 Acceleration components of the gravitational5.2 Acceleration components of the gravitationalacceleration vectoracceleration vectoracceleration vectoracceleration vectoracceleration vector
Figure 13 shows both the translational and rotationalcomponents of the time-history response waveforms forthe ballast-vibrating acceleration with respect to thevertical direction that were imparted by the first andsecond axles of the lead coach bogie when a passengerexpress train passed through the test section at a speedof 78 km/h. The time history of vertical acceleration wasobtained by multiplying the measured time-history re-sponse of the X-, Y- and Z-axis accelerations of the indi-vidual sensors (A and B) by a rotational transformationmatrix consisting of the direction cosine of each axis onthe gravity axis. For comparison with the translationalcomponent, the rotational component in the figure wasmultiplied by the distance between the sensors and ex-pressed in units of acceleration (m/s2). As the figureshows, ballast grain subjected to the impact load excitedby a train generated high-frequency translational and
rotational motion.In Fig. 13(a), which shows the translational compo-
nent, the negative direction is the gravity direction. Thefigure shows the impact vibration attributable to eachloaded wheel. High-frequency motion was generated inthe ballast grain subjected to the impact load excited bythe train. A large upward amplitude occurred immedi-ately after loading, and a high frequency of several hun-dred Hertz rapidly attenuated with the intense vibra-tion afterwards. Subsequently, when the attenuationtendency had almost settled after 0.04 s from loading, agentle vibration of around 50 − 100 Hz occurred. In Fig.13(b), which shows the rotational component, althoughhigh frequency immediately after loading is also observedin the rotational component, it seldom occurs after thereduction of high-frequency vibration on rotational mo-tion.
To clarify, the high-frequency damping of vibrationthat immediately follows loading comes from local activ-ity in the crushed stone accompanied by rotation. Thewaveform of approximately 50 − 100 Hz that follows itcontains many translation components, and is accompa-nied by almost no rotation. It is therefore presumed thatthe adjacent crushed stone also undergoes almost uni-form motion.
5.3 Dependency of particle activity on frequency5.3 Dependency of particle activity on frequency5.3 Dependency of particle activity on frequency5.3 Dependency of particle activity on frequency5.3 Dependency of particle activity on frequency
Figure 14 shows both the translational and rotationalcomponents of the corresponding power spectrum den-sity (PSD) functions for ballast vertical acceleration inthe perpendicular direction as described above in Fig.13: the damped vibration part immediately after load-ing (for 0.0512 s, 20-kHz sampling interval, Welch-type
Fig. 13 TFig. 13 TFig. 13 TFig. 13 TFig. 13 Translational and rotational components of time-ranslational and rotational components of time-ranslational and rotational components of time-ranslational and rotational components of time-ranslational and rotational components of time-history response waveforms for ballast-vibratinghistory response waveforms for ballast-vibratinghistory response waveforms for ballast-vibratinghistory response waveforms for ballast-vibratinghistory response waveforms for ballast-vibratingacceleration with respect to the vertical directionacceleration with respect to the vertical directionacceleration with respect to the vertical directionacceleration with respect to the vertical directionacceleration with respect to the vertical direction
Acce
lera
tion
Acce
lera
tion
(a) Translational components
(b) Rotational componentsTime (s)
Time (s)
302010
−10
0−20
−30
302010
−10
0−20
−30
0 0.05 0.1 0.15 0.2
0 0.05 0.1 0.15 0.2

108108108108108 QR of RTRI, Vol. 50, No. 2, May. 2009
Fig. 14 Power spectrum density functions of measuredFig. 14 Power spectrum density functions of measuredFig. 14 Power spectrum density functions of measuredFig. 14 Power spectrum density functions of measuredFig. 14 Power spectrum density functions of measuredballast-vibrating accelerationballast-vibrating accelerationballast-vibrating accelerationballast-vibrating accelerationballast-vibrating acceleration
window function, 1,024 data points), and the waveformafter the above-described damped vibration (measuringtimes from 0.04 − 0.10 s, 20-kHz sampling interval,Welch-type window function, 1,200 data points). As theresponse at over 600 Hz is very small (almost zero), thefigure presents results only up to 600 Hz. The range ofwidth for these two PSD functions differs. Consequently,the translational components are shown on the left axisand the rotational components are shown on the right.
Regarding the damped vibration that occurs imme-diately after loading, Fig. 14(a) shows several peaks atapproximately 340 Hz and 460 Hz as a high-frequencyresponse accompanying the low-frequency response vi-bration. These resonant frequencies are approximatelyequal for both rotational and translation acceleration.Figure 14(b) shows that the waveform component afterdamped vibration consists mainly of a low-frequencytranslation component of less than 200 Hz; the PSD func-tion related to the rotation component is extremely smallcompared with the translation component.
These results clarified that ballast grain subjectedto train-related impact loads generated high-frequencytranslational and rotational motion at 300 − 500 Hz to-gether with low-frequency motion of 200 Hz or less ingeneral. The impact load component of the high fre-quency generated by wheel and rail interaction is con-sidered to be transmitted to the ballast grains throughthe rail, pad, sleeper and boundary layer of the sleeperand ballast. Under these conditions, ballast grains sub-jected to impact loads excited by a train generated high-frequency translational and rotational motion.
6. Summary6. Summary6. Summary6. Summary6. Summary
This paper introduces newly developed techniquesto measure the dynamic-response characteristics ofballasted track (in the form of dynamic pressure distri-bution on sleeper bottoms and the 3D motion of ballaststone) with the aim of application to discontinuous nu-merical analysis to elucidate railway ballast deteriora-tion behavior resulting from cyclic traffic loads. Sensoryperformance was examined through a full-scale fieldexperiment performed on a railway line. The results ob-tained from the study are outlined below.
(1) A sensing sleeper with numerous ultra-thin impactforce sensors attached to its underside was devel-oped to measure the dynamic pressure distributionon the sleeper bottom, and its sensory performancewas confirmed.
(2) The dynamic running load induced by passing trainswas not distributed uniformly throughout the sleeperundersurface. Rather, it varied significantly with lo-cation, and tended to be concentrated at specific con-tact points.
(3) A three-dimensional sensing stone was developed tomeasure the existing three-dimensional translationaland rotational behavior of ballast particles using twobuilt-in piezoresistive triaxial acceleration sensors.The results confirmed that the techniques developedare useful for measuring 3D ballast motion impartedby moving trains.
(4) A full-scale field experiment for measurement at arail weld on a commercial service railway line wasperformed. Ballast grain subjected to impact loadsexcited by train passage generated high-frequencytranslational and rotational motion.
In future work, the effects on track stability andtrack deterioration need to be examined in detail by fre-quency band component――from low frequency to a highfrequency――using supplementary measurements, nu-merical analysis and modeled experiments. As the nextstep in this research project, the developed model’s pre-cision will be improved to enable investigation ofballasted track deterioration and examination of meth-ods to evaluate maintenance cost reduction measures.
AcknowledgmentAcknowledgmentAcknowledgmentAcknowledgmentAcknowledgment
Special appreciation is extended to the Kyushu Rail-way Company for their considerable cooperation in thisstudy.
ReferencesReferencesReferencesReferencesReferences
[1] Railway Technical Research Institute (1996), “DesignStandard of Railway Structures and Others − TrackStructures, Ballast Track,” RTRI (in Japanese).
(b) Waveform after the damped vibration
(a) Damped vibration part immediately after loading
Tran
slat
iona
l (10
5 m2 /s
3 ) 6
Frequency (Hz)
Rot
atio
nal (
105 m
2 /s3 )
Frequency (Hz)
Tran
slat
iona
l (10
5 m2 /s
3 )
Rot
atio
nal (
103 m
2 /s3 )
543210
6543210
0 100 200 300 400 500 600
0 100 200 300 400 500 600
00.40.81.21.622.4
00.40.81.21.622.4
Translational
Rotational
TranslationalRotational

109109109109109QR of RTRI, Vol. 50, No. 2, May. 2009
[2] Fumihiro Urakawa, Akira Aikawa, Akira Namuraand Akiko Kono, “Development of a three-dimen-sional measurement system for crushed stone andits application to discontinuous analysis,” Proceed-ings of Railway Mechanics, JSCE, Vol. 11, pp. 21 − 26,2007 (in Japanese).
[3] Itasca Consulting Group, Inc. , “Theory and Back-ground,” 3DEC − 3 Dimensional Distinct ElementCode, 2007.
[4] Akira Aikawa, Fumihiro Urakawa, “Modeling Tech-niques for Three-Dimensional Discrete ElementAnalysis of Conventional Ballasted Railway Trackand Its Application,” RTRI Report, Vol. 23, No. 2, pp.11 − 16, 2009 (in Japanese).
[5] Akira Aikawa, Fumihiro Urakawa, “Modeling tech-niques for three-dimensional (3D) discontinuous be-havior of railway ballast stones and their applica-tion,” Proceedings of the 57th National Congress of Theo-retical and Applied Mechanics, pp. 217 − 218, The Sci-ence Council of Japan, 2008 (in Japanese).
[6] Akira Aikawa, Fumihiro Urakawa, Akiko Kono,Akira Namura, Yoshiyuki Takao, “Development andapplication of dynamic pressure measurement tech-niques on a sleeper bottom,” Journal of Railway Me-chanics, Vol. 12, pp. 73 − 78, JSCE, 2008 (in Japa-nese).
[7] Akira Aikawa, “Three-dimensional measurement ofballast stone behavior induced by running trains andits application to parameter determination in DDA,”Journal of Applied Mechanics, Vol. 11, pp. 487 − 496,JSCE, 2008 (in Japanese).
[8] Yukio Fujimoto and Setyanto Taufiq Arif, “A Sheet-type Impact Force Sensor Using Piezoelectric Film(Mechanical System),” Transactions of the Japan Soci-ety of Mechanical Engineers, C, Vol. 73, No. 725, pp.184 − 191, JSME, 2007 (in Japanese).
[9] Japanese Standards Association, JIS (Japanese Indus-trial Standard) Handbook, 69, Railways, E 1202 “Post-tension type sleepers,” pp. 301 − 320, 2002 (in Japa-nese).
[10]Makoto Ishida, Akira Namura, Takahiro Suzuki,“Track Settlement Measurement and a Dynamic Pre-diction Model based on Settlement Laws,” Proc. WCRR2003, 728 − 737, 2003.
[11]Leykauf, G. , Mattner, L. , Steinbeiser, L. ,“Schwingungsmessungen mittels Schotter-Messteinen,” ETR- Eisenbahntechnische Rundschau,Vol. 47, Heft 1, 37 − 41, 1998.
[12]Osamu Shimoe, Yasunori Abe, Yukimasa Shonowaki,Shigenao Hashizume, “A Magnetic Compass Usinga Magneto-resistive device,” Hitachi Metals TechnicalReview, Vol. 18, 37 - 42, 2002 (in Japanese).