Embed Size (px)
Citation preview

Tethered Satellite PropulsionTethered Satellite Propulsion
Icarus Student Satellite
ProSEDS

TopicsTopics
What is Tethered PropulsionWhy do we need Tethered PropulsionHow do we implement the model for
Tethered Propulsion

WhyWhy
Normal Satellite Missions– Launch rocket/space shuttle– Shuttle deploys payload (usually satellite)– Satellite performs function, and then eventually
loses enough momentum to fall out of orbit– If Satellite needs more time in space, fuel must
be shipped up to the satellite– Bottom Line: needs fuel

WhyWhy
Disadvantages of Fuel:– Expensive
Refueling MIR space station costs estimated at about $1 billion.
– Limited Supply Earth is already running out of fossil fuels,
nuclear/renewable resources not yet a viable solution for propulsion in space
We need a propellant-less propulsion model

HowHow
Earth has magnetic field Earth has electric field Basic law of Physics :
F = B x I If we could utilize the Earth’s
electric and magnetic fields by driving current in the right direction, then we can generate an electromotive force sufficient for use in orbit

HowHow
Keep it simple:– Generate current along a straight line
Use a taut conducting wire (Tether) to channel the current
– Tether needs to be kept taut and oriented properly in the magnetic field
– Another basic rule of physics: if two masses connected by a tether are in orbit, the masses will align themselves along the local vertical regardless of the starting orientation.

Potential UsesPotential Uses

WhatWhat
ProSEDS – Propellant-less Small Expendable Deployer System – Drives current through the tether– Deploys endmass (Icarus)
Icarus (ProSEDS Endmass)– Dead weight (~20 kg +/- 0.4 kg)– Used to study tether physics– Possible backup in case of ProSEDS failure

Icarus Student SatelliteIcarus Student Satellite
First (real) student built, designed, and tested satellite
Part of the tethered satellite propulsion model Scheduled to be launched March/May 2001 Advantageous since it is an instrumented endmass
as opposed to a passive dead weight Helps prove NASA’s “cheaper/faster/better”
solution model

WhatWhat
Payload– GPS, Magnetometer – provide location
information GPS unit uses the GPS satellite network Magnetometer compares the magnetic readings at
present location against the current model of the Earth’s magnetic field
Together, both units provide a complete measurement of the physics of the Endmass

WhatWhat
Control and Data Handling Subsystems– Octagon systems 386 board assimilates the
information, sends it to the transmitterPower: 3.0 W Memory: 2.64 MB total
– 2 MB DRAM– 512 kB FLASHROM– 128 kB SRAM (battery backed)
A/D: 8 channels, 12 bit accuracy Serial Ports: 2 UART 16C550 chips with RS-232
voltage level Digital I/O: 24 channels (TTL) Operating Temperature: -40 to 85 C

WhatWhat
Control and Data Handling Subsystems– Custom C&DH Board performs tasks required
specifically by the Endmass
• Analog MUX used to multiplex A/D channels – provides 23 total channels
Platform for Health Data Collection
Power and Data Connections for all Subsystems
2 4-Orbit Timers in Series 2 21-Day Timers in Parallel GSE Data Connection GPS Hard Reset Switch

WhatWhat
Power and Electrical Subsystems– Power Distribution System– Solar Cells
Used to provide main power to the Endmass in day-side of the orbit (8 W) and to charge the batteries
Total power provided ~16 W
– Batteries (Ni-Cd) Used to provide main power to the Endmass in
Eclipse (~8 W)

WhatWhat
CDH
GSE(J1) Mag(J3)
Tx(J4)
PE(J2)
Octagon(J6)
GPS(J7)
Therm(J5)PE
CDH(J4)Battery(J3)
PAA GSE(J2)
Solar Cells(J1)
Mag
Tx
Octagon
33 wires, ~6”
GPS 14 wires~9.5”
4 wires~6.5”
7 wires, ~18”
2 wires ea~7,17,17,32”
GSE (50pin)PAA (15pin)
2+, 1- each stringnegatives connected on each panel,Tail,Top,PAA: 16.25”, Outboard 26.25”,Nose: 22.5”, Bottom: 24.3”
8 wires~20.5” 12 wires
~38”
25 wires~25.5”
Batt
8 wire~7”
2 wire
Keepalive batteryconnected to CDHboard via jumpersat GSE connector.
16 wires~12”, 15”8 go to 9 pinconnector on PE,8 go to floating connector.
All wire is 24 guage, from the lab downstairs. (Flight qualified.)
24 wires
8 wires
8 wires
PEPAA
PEGSE
4 wires~30” PAAGSE
PECDH1
CDHGSE
PEBattery
PECDH2
CDHMag
CDHBatt
PESolar
CDHTxCDHGPS
37pin
37pin
25pin 9pin,9pin
9pinmale
37pin15pin15pin
9pin
9pin
9pin
25pin
Female on Icarus side, Male from GSE boxFemale on inside, maleon outsidefrom PAAswitches
2 Jumper wires go straight to Octagon board instead of throughC&DH board.
Custom TransmitterConnector (REM- notoxic metals)
Male connector on Mag .,so cable has female connectoron this end.
Male connector on GPS,so cable has female connectoron this end.
Bulkhead MountedBulkhead Mounted
4.1,4.2

WhatWhat
Transmitter– Outputs assimilated data from the Octagon
board @ ~2.247 GHz– Ground stations at various locations around the
world are set up to receive the data from this transmitter
– The data is then relayed back to the Icarus team for analysis and conclusions

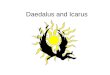
SchematicSchematic
Transmitter
GPS
Magnetometer
Octagon 386
Health System
Sampled 1/ 2 secConnection: RS-232
A/D
3 Analog ValuesSampled 1/sec
Digital bit streamConnection: TTL
Thermistors, Currents, VoltagesSampled 1/min Serial Port
Ground Support Equipment
Development and TestingConnection: RS-232
MUX
on/off
data
Serial Port
Dig I/O
MEM
on/off
C&DH System

Payload
GPS Receiver Magnetometer
8 bits
C&DH
Chip 25 MHz
RAM 2 MB
ROM 512 kB
Transmitter (2.2475 GHz)
TelemetryBattery
Power Distribution
Solar Cells
PA
A Separation Switches
ProSEDS
tether
2
Tether attachment point
U of M GSE
SRAM 128 kB
GPS Almanac Data
V = 5.0 V DCI = 11 mA
V = 5.0 V DCI = 185 mA
V = 5.0 V DCI = 650 mA
V = 12.0 VDCI = 400 mA
Power Path
Data Path
Control
4 orbit timer
21 day timer
System Level DiagramSystem Level Diagram

T=+60 min Power-up,
Release
T=~3 hoursTether
Deployment
T=?Instrument
MeasurementsT=+1 day
ETDDeployment
T=21+ daysReentry
T=0March/May 2001Delta-II Launch!
Mission PlanMission Plan

The Big PictureThe Big Picture