Embed Size (px)
Citation preview
1
The Adaptive Pulse Compression Concept
- Simulated & Experimental Results
Shannon D. Blunt
EECS Dept.University of Kansas
Lawrence, KS
Karl Gerlach
Radar DivisionNaval Research Laboratory
Washington, DC
2
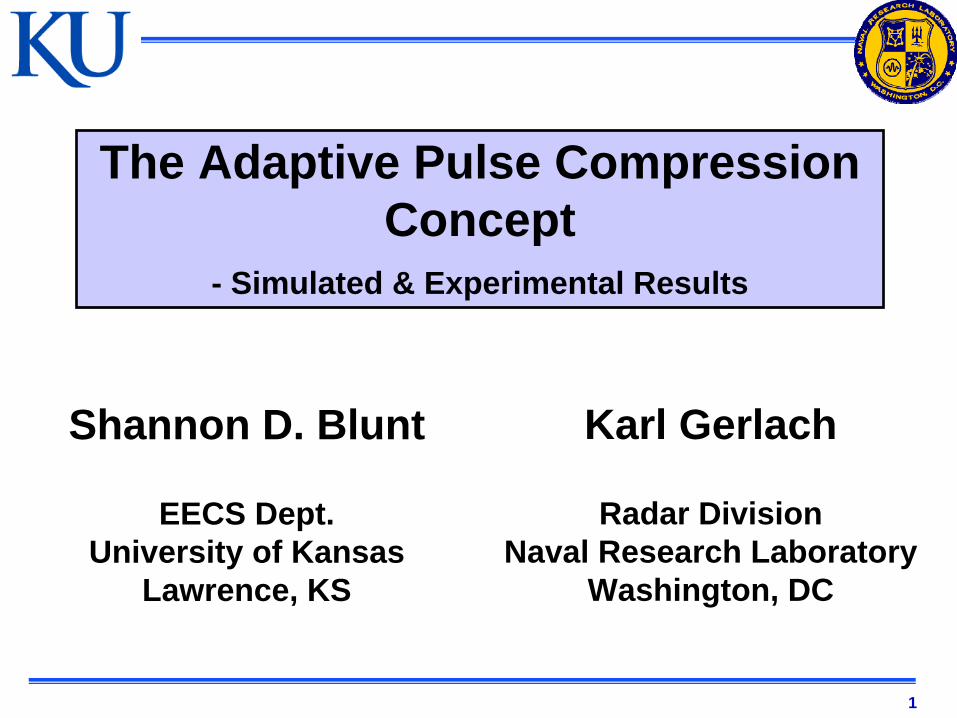
Motivation
Detection Threshold
Strong Target Echo Weak Target Echo
TARGET NOT DETECTED!!
PulseCompressor
Local CFARDetector
ReceivedRadarSignal
Detect ?
range• • •
peak-to-sidelobelevel
3
Adaptive Pulse Compression
• The Matched Filter is only matched to the transmitted signal, not the received signal.– Results in large target returns masking smaller nearby targets.
• Least Squares approaches have been proposed but they are not robust to “out-of-window” scatterers.– Degrade if there are scatterers in close proximity outside of
available data window.
• Employ Minimum Mean-Square Error (MMSE) estimation to adaptively estimate the filter that matches the return signal.– Denoted as Adaptive Pulse Compression.
4
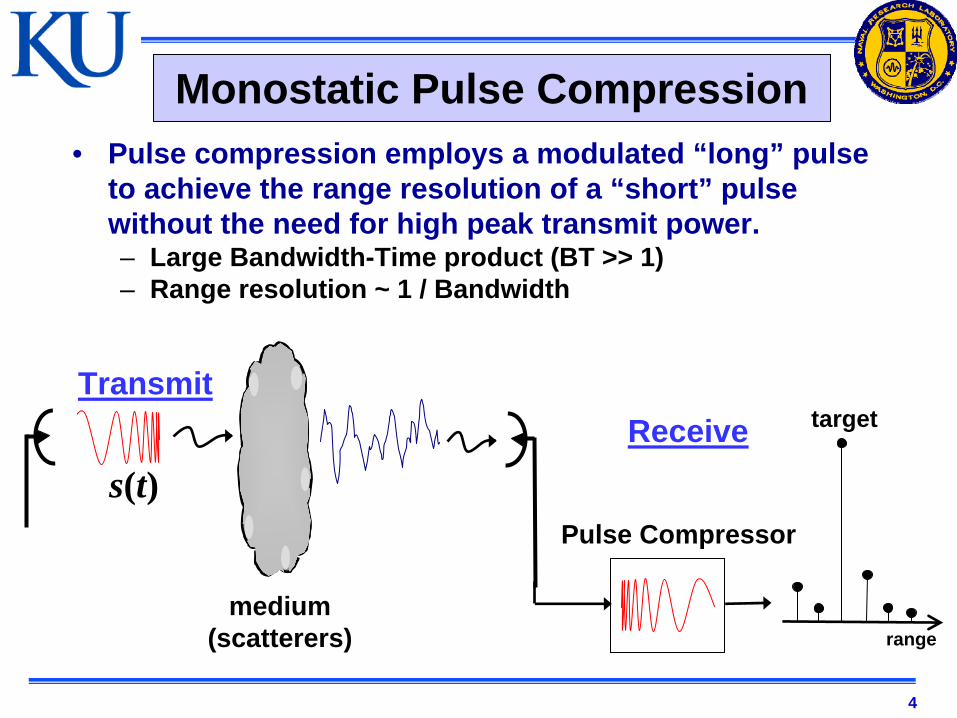
Monostatic Pulse Compression• Pulse compression employs a modulated “long” pulse
to achieve the range resolution of a “short” pulse without the need for high peak transmit power.– Large Bandwidth-Time product (BT >> 1)– Range resolution ~ 1 / Bandwidth
TransmitReceive
Pulse Compressor
rangemedium
(scatterers)
target
s(t)

5
Discrete System Model
s
x(ℓ)
Ground Truth Impulse Response
radar transmit signals ∗ x(ℓ)
received return signal
6
Received Signal Model
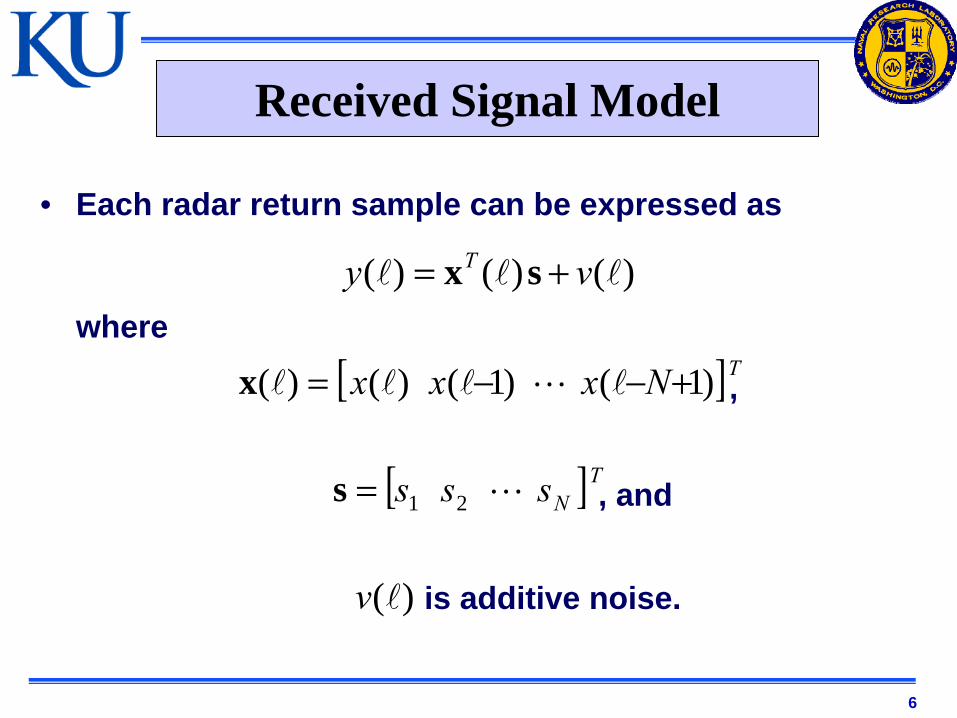
• Each radar return sample can be expressed as
where
,
, and
is additive noise.
)()()( vy T += sx
[ ]TNxxx )1()1()()( +−−=x
[ ]TNsss 21=s
)(v
7
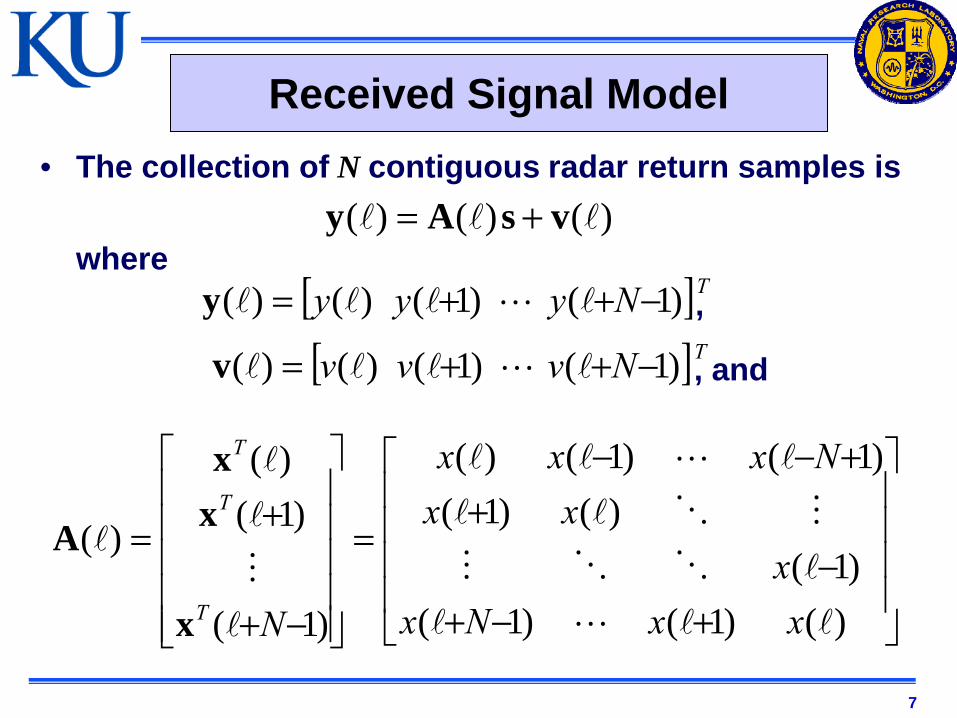
Received Signal Model• The collection of N contiguous radar return samples is
where ,
, and
)()()( vsAy +=
[ ]TNyyy )1()1()()( −++=y
[ ]TNvvv )1()1()()( −++=v
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
+−+−
++−−
=
⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢
⎣
⎡
−+
+=
)()1()1()1(
)()1()1()1()(
)1(
)1()(
)(
xxNxx
xxNxxx
NT
T
T
x
xx
A
8
Matched Filter Solution• In the digital domain, Matched Filtering represented as
which can be rewritten as
• When the off-diagonal elements of are significant with respect to , the filter is not matched and will suffer from range sidelobes.
• Replace the matched filter with a filter that will also suppress the interference from neighboring range cells => dependent on !
)()(ˆ ysHMFx =
).()()(ˆ vssAs HHMFx +=
)(A
)(A
)(x
9
MMSE Formulation
• Replace the Matched Filter, , with the MMSE filter denoted .
• For each range cell index minimize the MMSE cost function
with respect to the MMSE filter .
⎥⎦⎤
⎢⎣⎡ −=
2)()()()( yw HxEJ
Hs)(Hw
1,,0 −= L
)(w
10
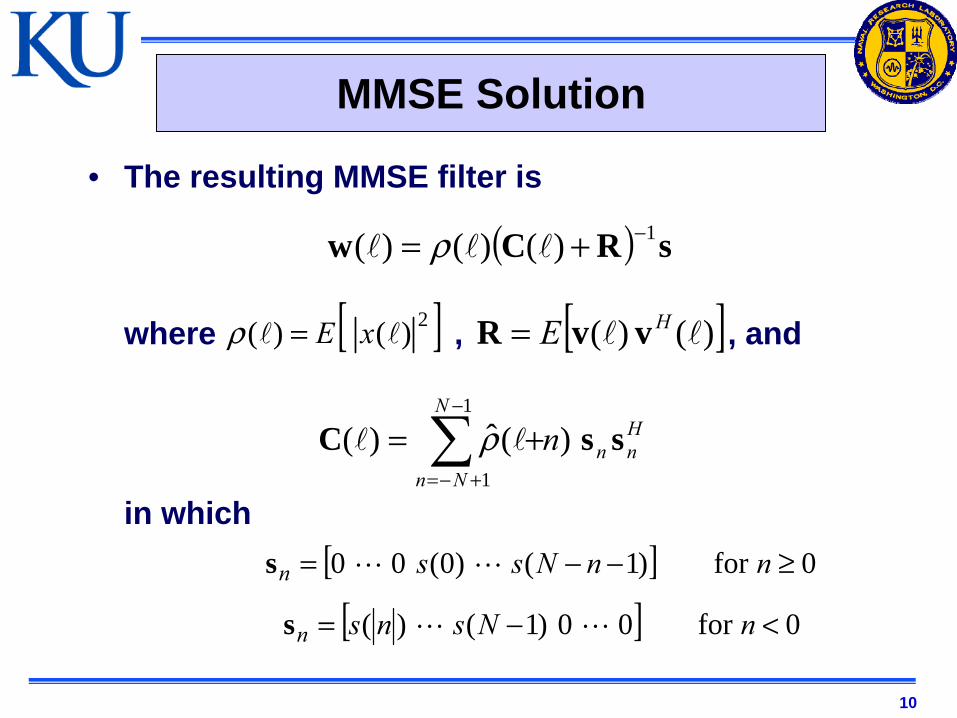
MMSE Solution
• The resulting MMSE filter is
where , , and
in which
( ) sRCw 1)()()( −+= ρ
[ ]2)()( xE=ρ [ ])()( HE vvR =
∑−
+−=
+=1
1
)(ˆ)(N
Nn
Hnnn ssC ρ
[ ] 0for)1()0(00 ≥−−= nnNssns
[ ] 0for00)1()( <−= nNsnsns
11
Implementation
• Initial range cell estimates via matched filtering are used to compute and then .
• The Adaptive Pulse Compression algorithm employs the range cell estimates from the previous stage as a priori information.
• 3~4 stages has been found to be sufficient.
• Employ only as needed.– Apply only in regions around “large” targets.– Also can use fast update via matrix inversion lemma to
further reduce computation.
)(ρ̂ )(w
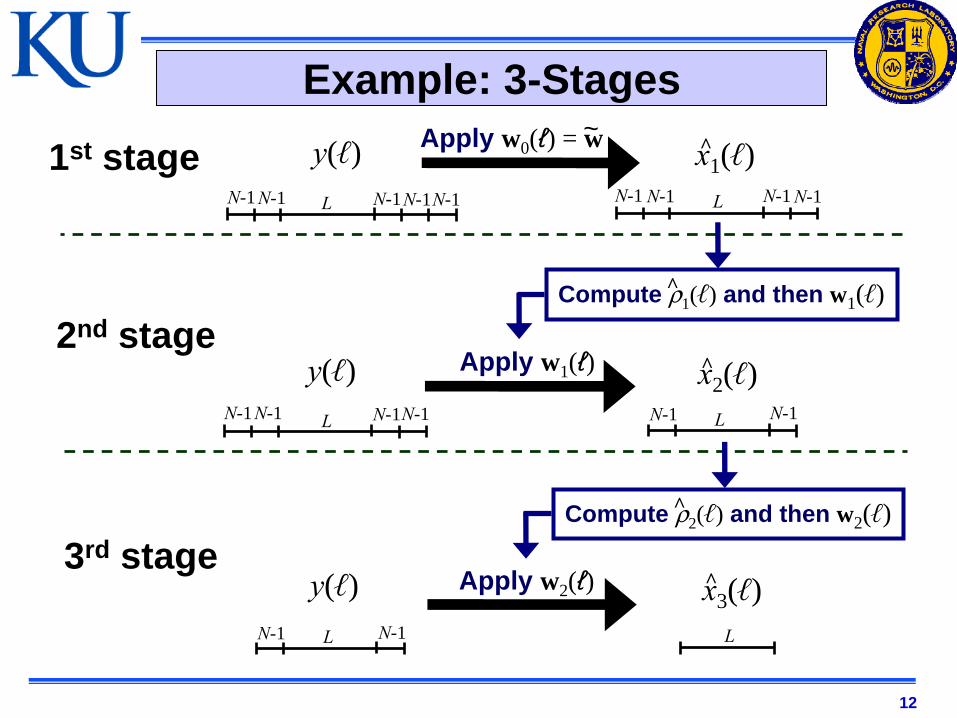
12
Example: 3-StagesApply w0(ℓ) = w
LN-1 N-1
y(ℓ)L
x3(ℓ)
1st stage
2nd stage
3rd stage
LN-1 N-1
y(ℓ)
LN-1 N-1
y(ℓ)
N-1N-1
N-1 N-1N-1 LN-1 N-1N-1 N-1
LN-1 N-1
x2(ℓ)
x1(ℓ)
Apply w1(ℓ)
Apply w2(ℓ)
~
Compute ρ2(ℓ) and then w2(ℓ)^
^
^
^
Compute ρ1(ℓ) and then w1(ℓ)^
13
Multistatic Interference Rejection
• Adaptive Pulse Compression is essentially an adaptive beamforming technique applied in the range domain.– For a given range cell, it puts a “range null” at relative
range offsets of nearby large targets.
• The approach can be generalized to accommodate multiple waveforms simultaneously (assuming the waveforms are known at the receiver).– Reject interference from other radars operating in-band
by “range nulling” large bi-static returns.
• May enable shared-spectrum radar to alleviate spectral crowding and provide additional capabilities.
14
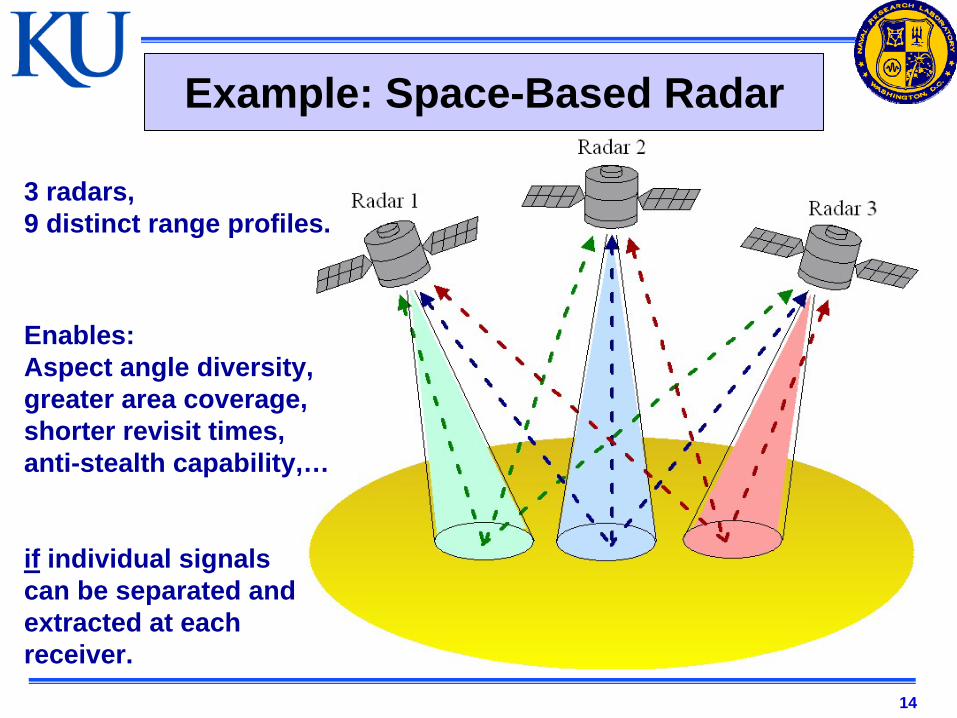
Example: Space-Based Radar
3 radars,9 distinct range profiles.
Enables:Aspect angle diversity,greater area coverage,shorter revisit times,anti-stealth capability,…
if individual signalscan be separated andextracted at each receiver.
15
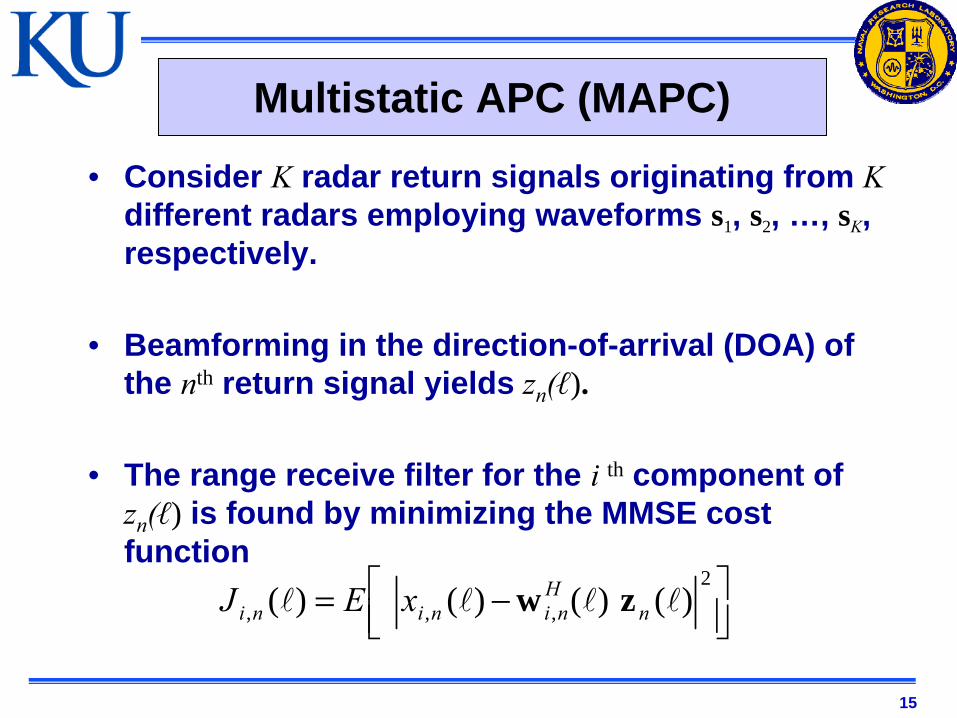
Multistatic APC (MAPC)
• Consider K radar return signals originating from Kdifferent radars employing waveforms s1, s2, …, sK, respectively.
• Beamforming in the direction-of-arrival (DOA) of the nth return signal yields zn(ℓ).
• The range receive filter for the i th component of zn(ℓ) is found by minimizing the MMSE cost function
⎥⎦⎤
⎢⎣⎡ −=
2
,,, )()()()( nH
ninini xEJ zw
16
Multistatic APC (MAPC)
• The multistatic MMSE-based filter for the ith
waveform at the range cell is thus found to be
where , is the noise covariance after beamforming, and
2,, |)(ˆ|)(ˆ nini x=ρ nR
th
( ) in
K
knknini sRCw 1
1,,, )(ˆ)( −
=⎟⎟⎠
⎞⎜⎜⎝
⎛+= ∑ρ
∑−
+−=
+=1
1,,,, )(ˆ)(
N
N
Hkknknk
ττττρ ssC
17
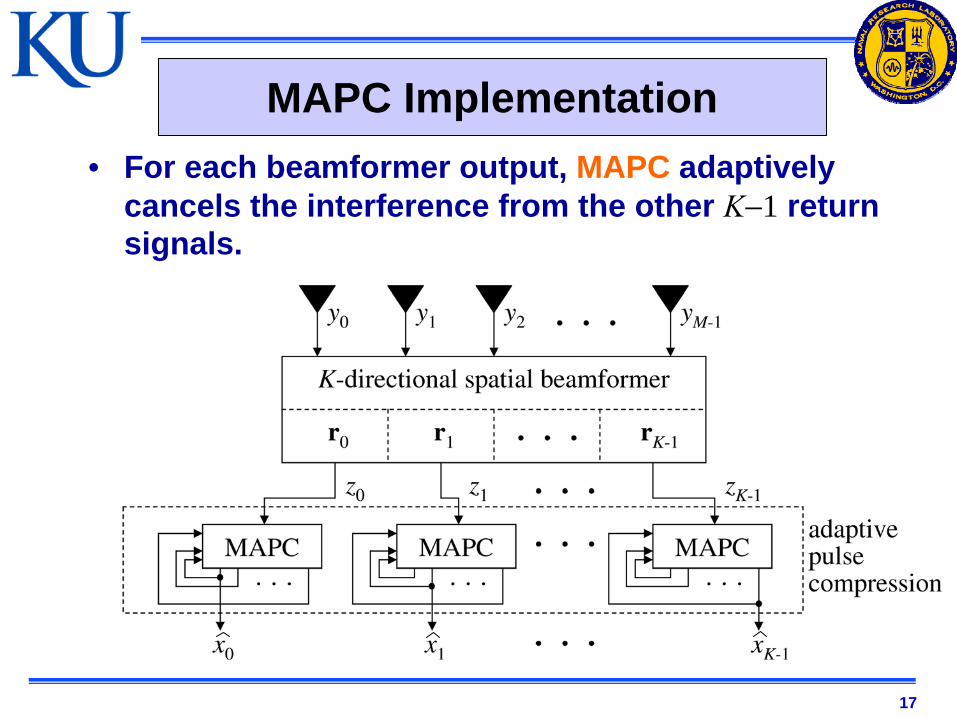
MAPC Implementation• For each beamformer output, MAPC adaptively
cancels the interference from the other K−1 return signals.
18
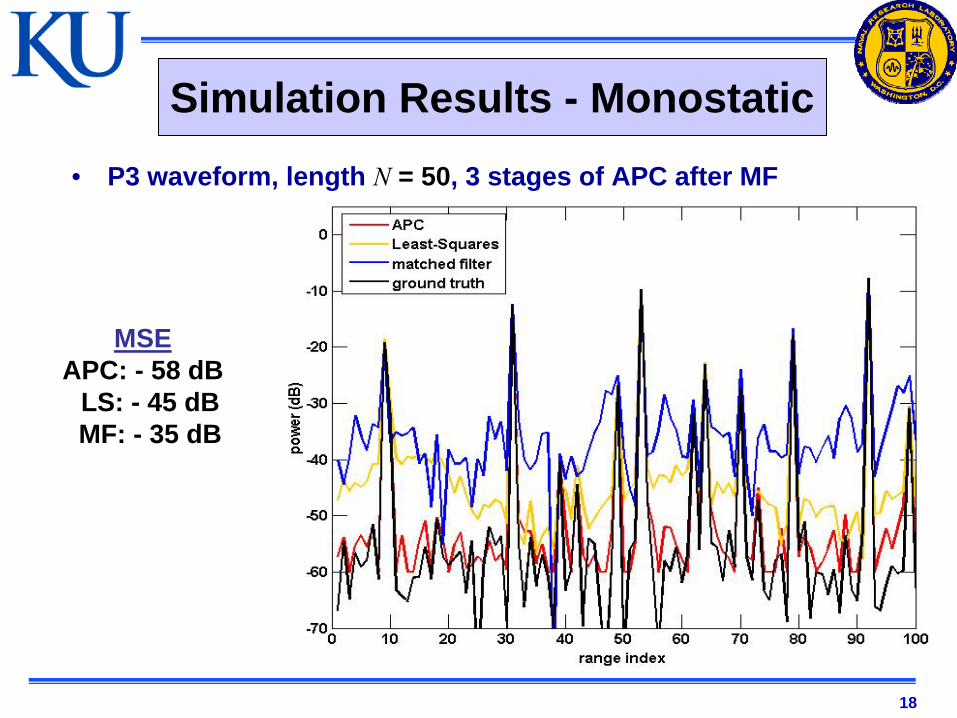
Simulation Results - Monostatic• P3 waveform, length N = 50, 3 stages of APC after MF
MSEAPC: - 58 dB
LS: - 45 dB MF: - 35 dB
19
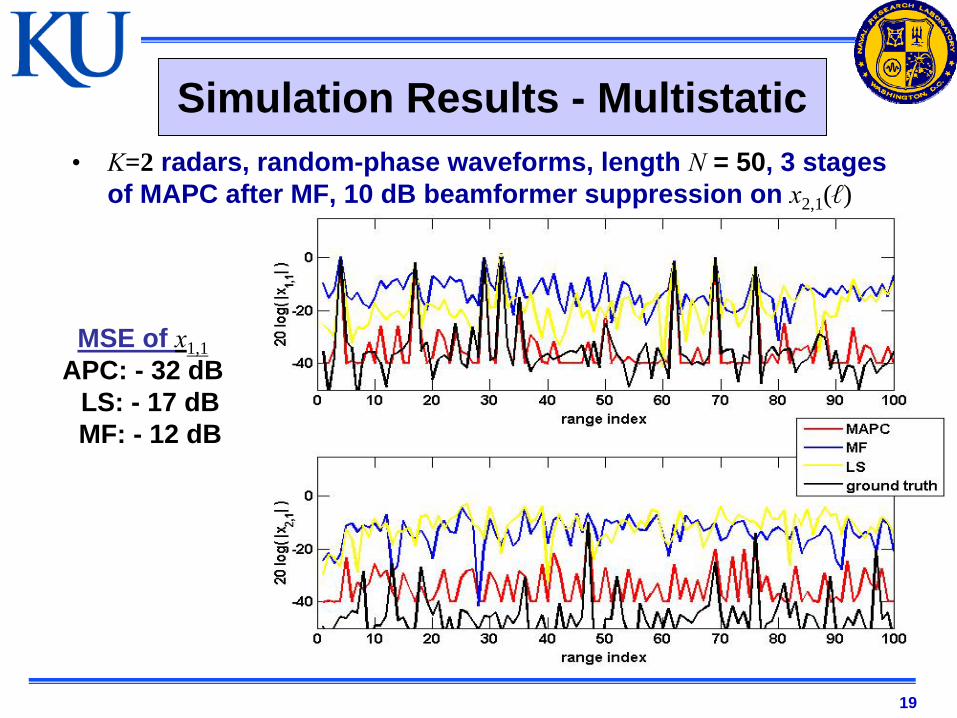
Simulation Results - Multistatic• K=2 radars, random-phase waveforms, length N = 50, 3 stages
of MAPC after MF, 10 dB beamformer suppression on x2,1(ℓ)
MSE of x1,1APC: - 32 dB
LS: - 17 dB MF: - 12 dB
20
Experimental Results
• Have begun experimental program at NRL to determine performance of APC/MAPC.
• Preliminary efforts to determine fidelity of waveform through portions of Tx/Rx chain.– Hi-fidelity waveform knowledge required for effective
cancellation performance.
Acknowledgement to Jean deGraaf and Aaron Shackelford of NRL for their efforts in collecting and analyzing the experimental data.
21
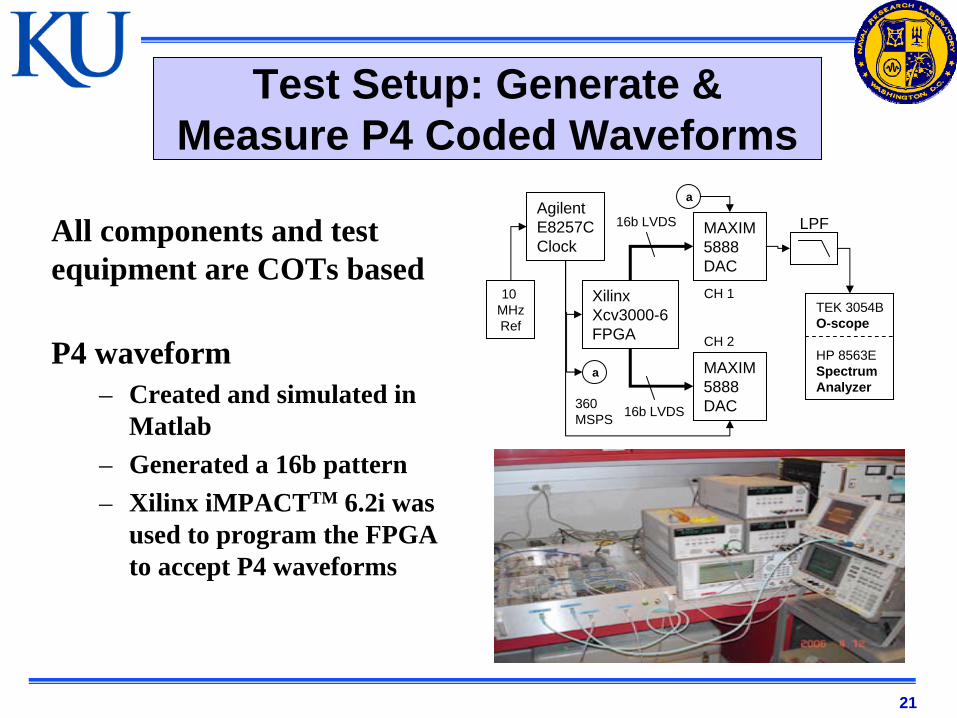
All components and test equipment are COTs based
P4 waveform– Created and simulated in
Matlab– Generated a 16b pattern– Xilinx iMPACTTM 6.2i was
used to program the FPGA to accept P4 waveforms
XilinxXcv3000-6FPGA
MAXIM5888DAC
MAXIM5888DAC
AgilentE8257CClock
10 MHzRef
360 MSPS
TEK 3054BO-scope
HP 8563ESpectrumAnalyzer
CH 1
CH 2
a
a
16b LVDS
16b LVDS
LPF
Test Setup: Generate & Measure P4 Coded Waveforms
22
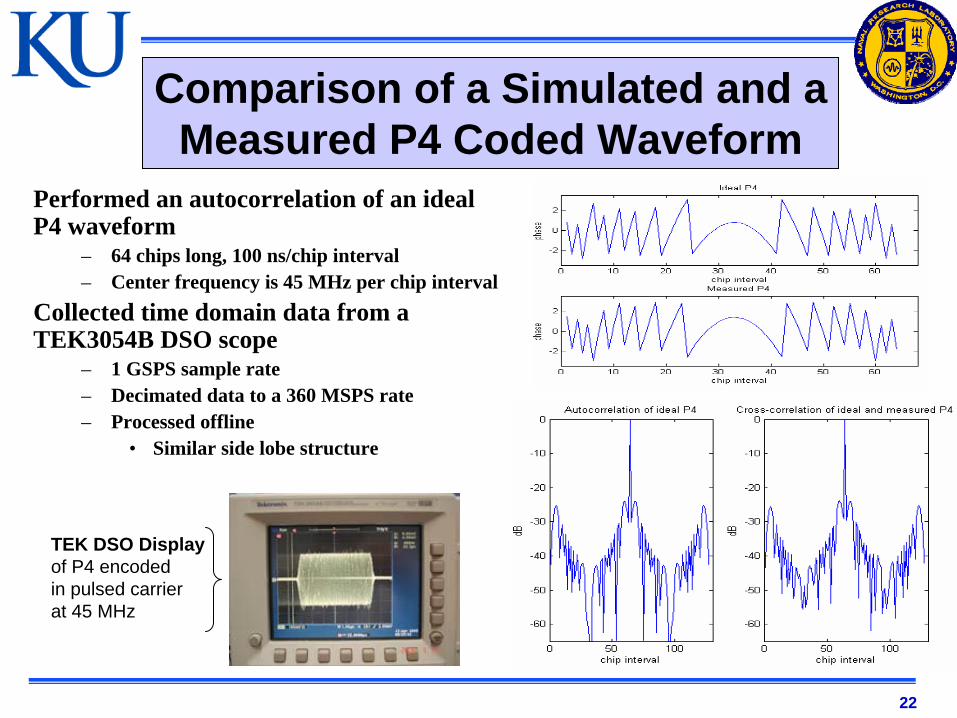
Performed an autocorrelation of an ideal P4 waveform
– 64 chips long, 100 ns/chip interval– Center frequency is 45 MHz per chip interval
Collected time domain data from a TEK3054B DSO scope
– 1 GSPS sample rate– Decimated data to a 360 MSPS rate– Processed offline
• Similar side lobe structure
TEK DSO Displayof P4 encodedin pulsed carrierat 45 MHz
Comparison of a Simulated and a Measured P4 Coded Waveform
23
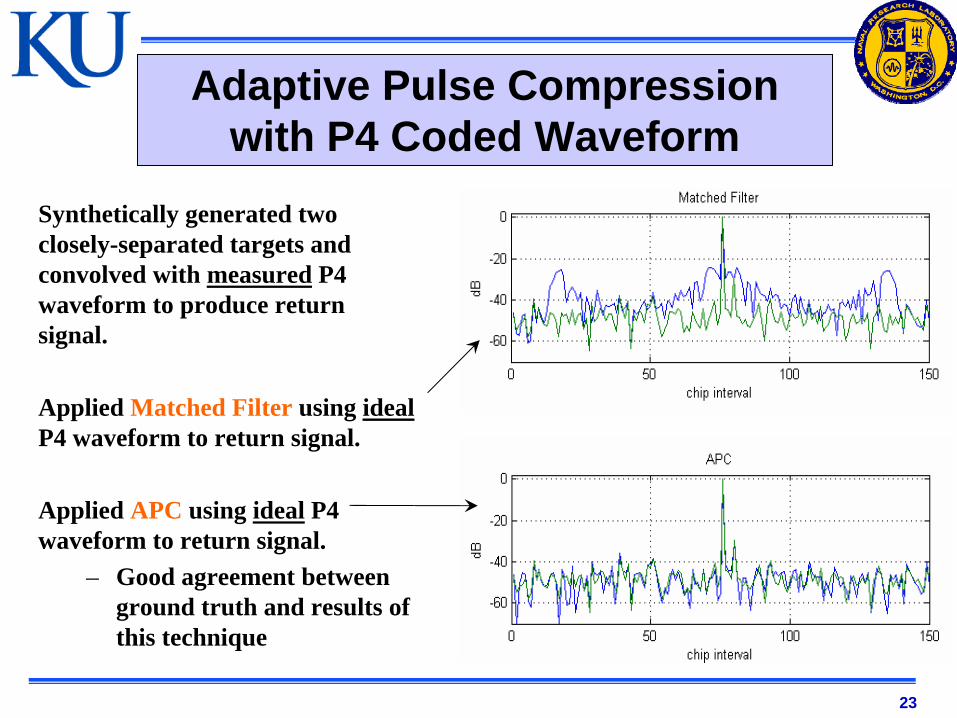
Synthetically generated two closely-separated targets and convolved with measured P4 waveform to produce return signal.
Applied Matched Filter using idealP4 waveform to return signal.
Applied APC using ideal P4 waveform to return signal.
– Good agreement between ground truth and results of this technique
Adaptive Pulse Compression with P4 Coded Waveform
24
Conclusions
• The Matched Filter is matched to the transmitted signal but not to the received signal which results in range sidelobes.
• The APC algorithm adaptively estimates the MMSE matched receive filter for each individual range cell in order to suppress range sidelobes.
• APC can be generalized to accommodate multiple received radar signals and may possibly facilitate shared-spectrum radar.
• Initial experimental results indicate that APC is robust to modest distortion of the transmission waveform. Further experimentation is underway to test the fidelity limits of the algorithm.