Embed Size (px)
Citation preview
1
The American
Ivan BukreyevUniversity of Florida
IMDL, 9/18/2012
2
Special Sensor
Physics/EE backgroundNot much mechanical background
3
Special Sensor
Physics/EE backgroundNot much mechanical background
So…Make mechanically challenging
platform – hexapod
4
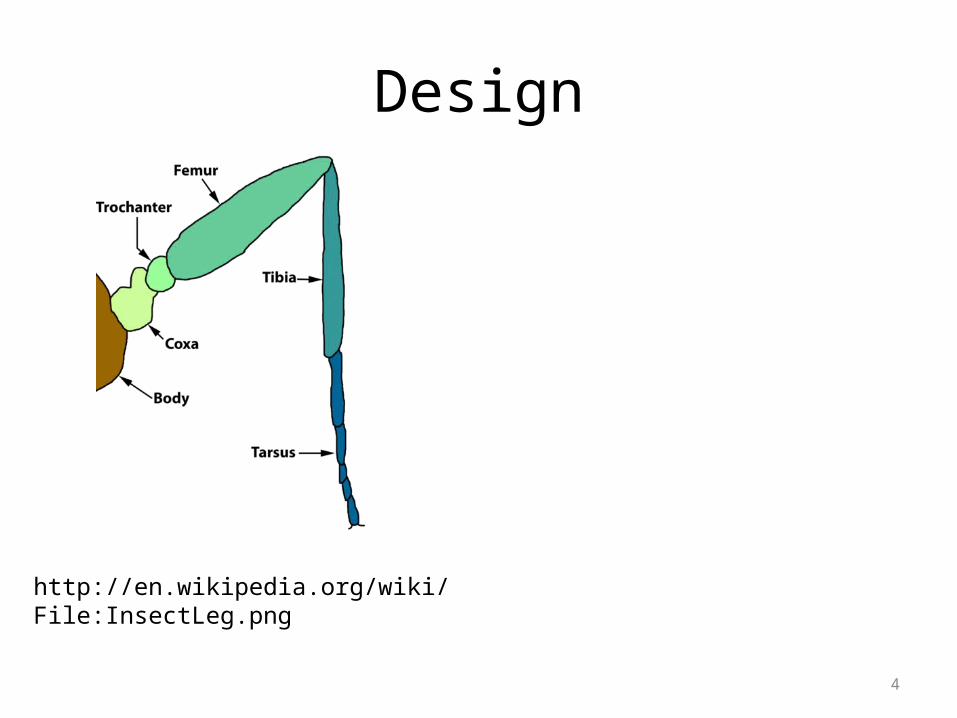
Design
http://en.wikipedia.org/wiki/File:InsectLeg.png
5
Design
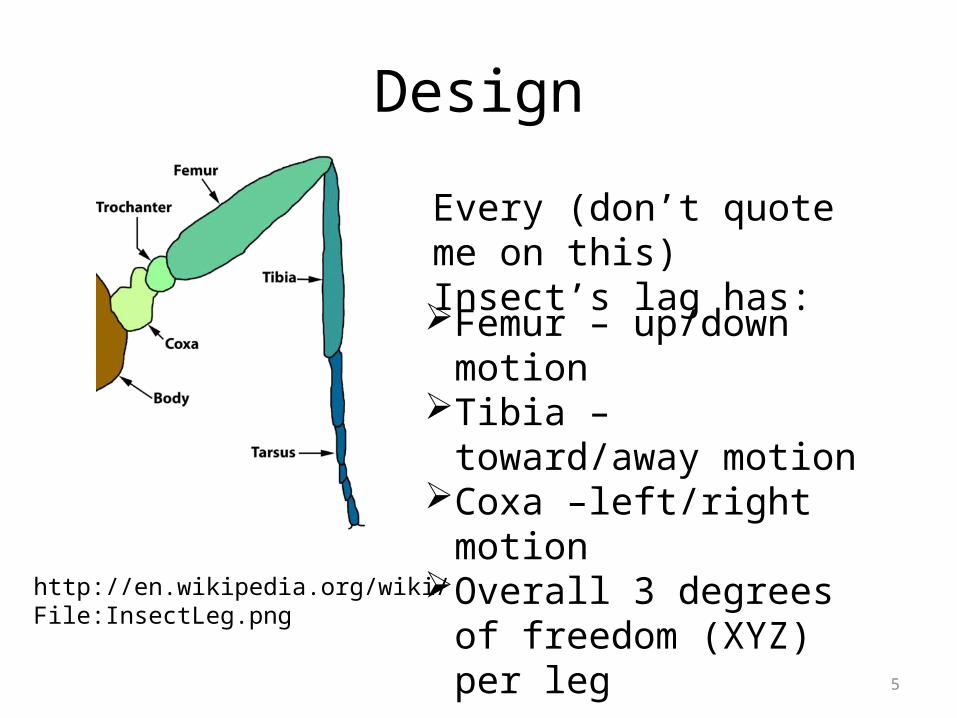
http://en.wikipedia.org/wiki/File:InsectLeg.png
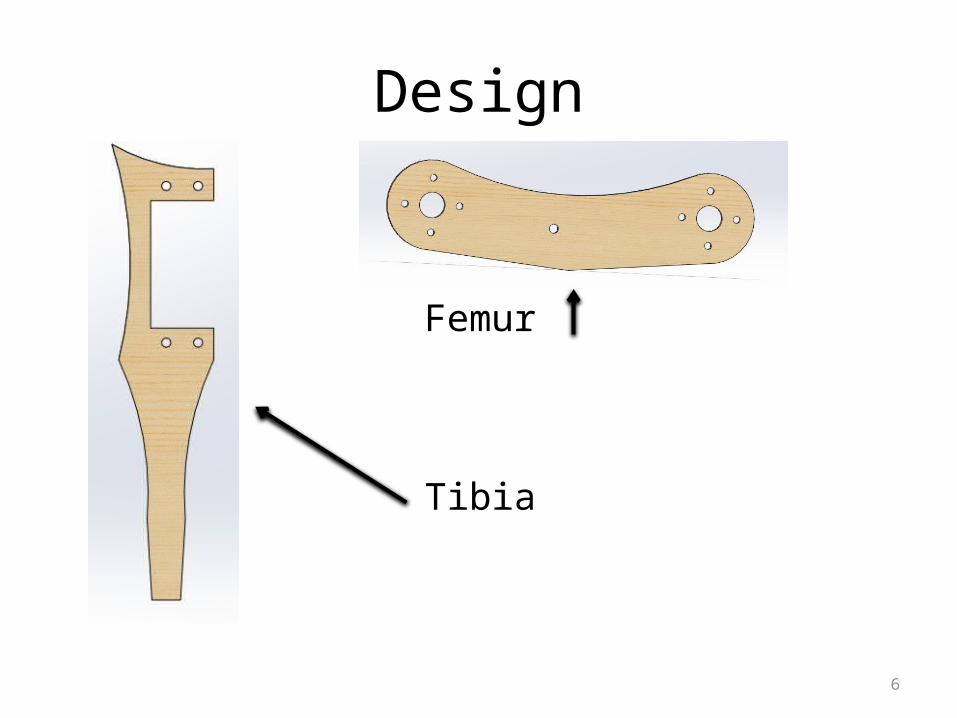
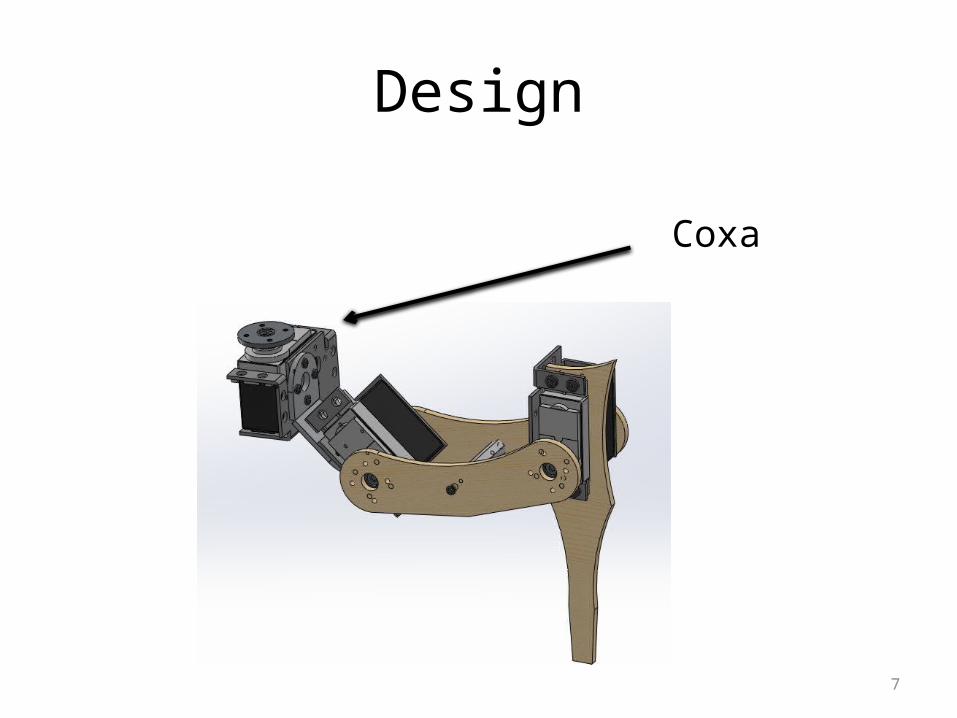
Femur – up/down motionTibia – toward/away
motionCoxa –left/right motionOverall 3 degrees of
freedom (XYZ) per leg
Every (don’t quote me on this) Insect’s lag has:
6
Design
Femur
Tibia
7
Design
Coxa
8
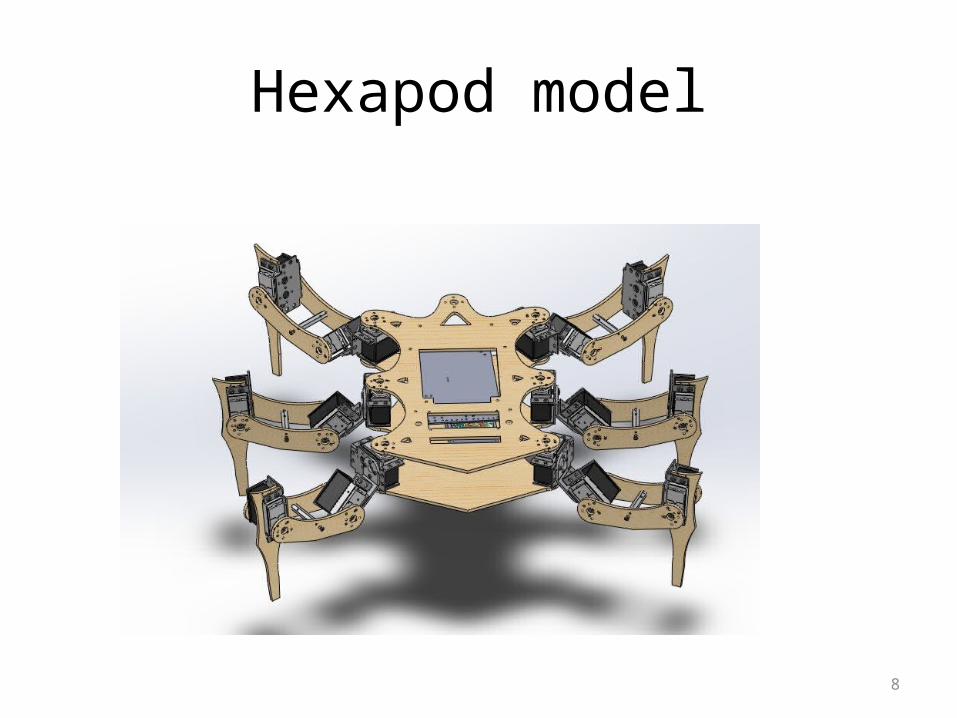
Hexapod model
9
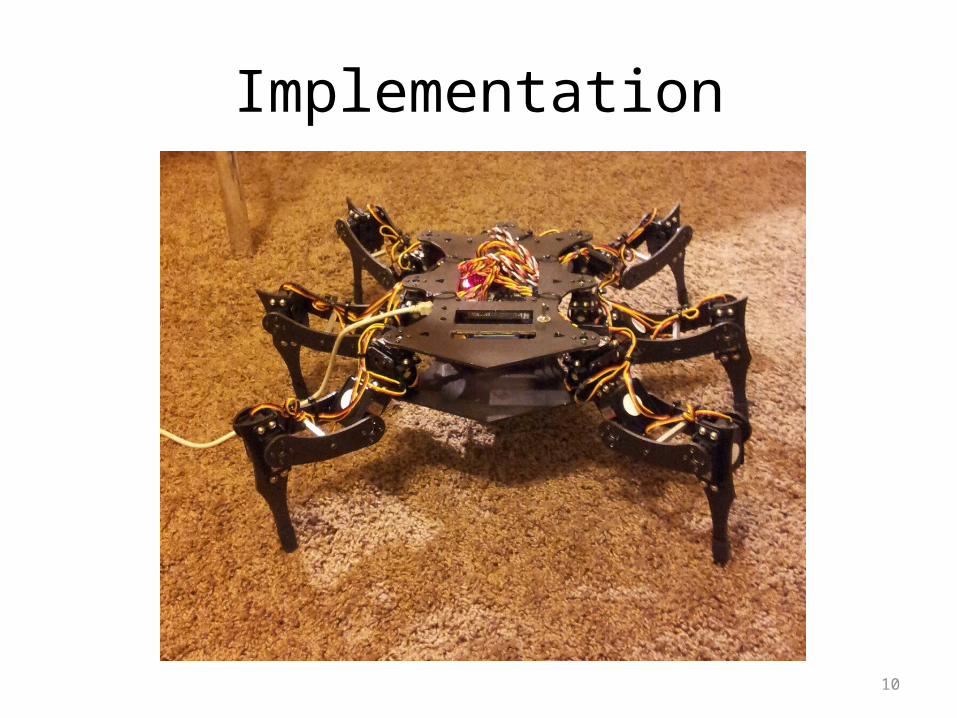
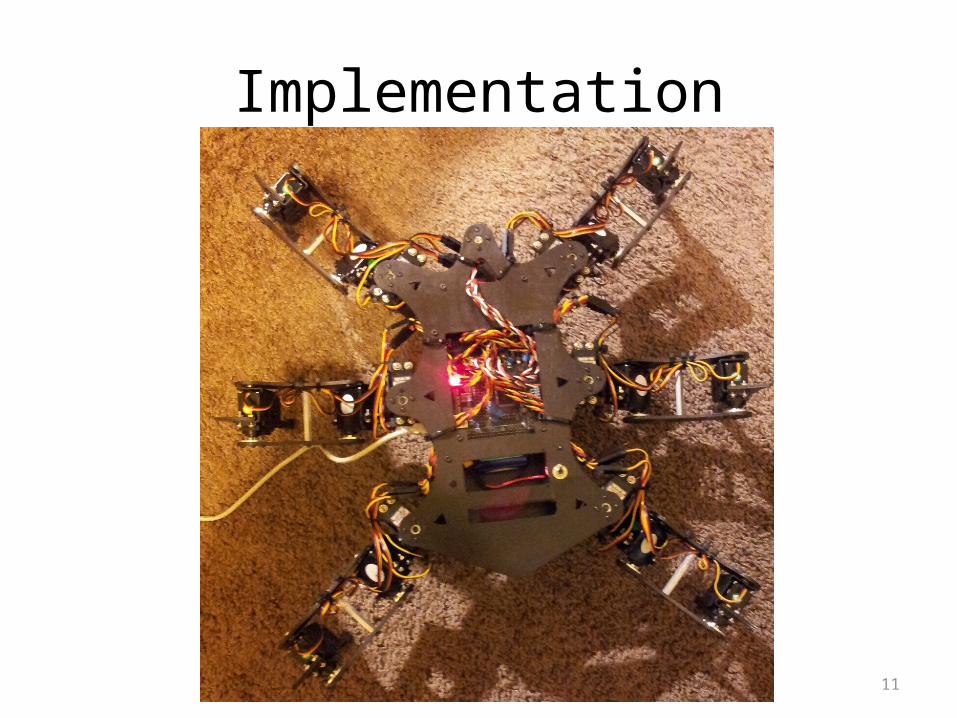
Implementation
Undisclosed amount of $ and 211 screws later:
10
Implementation
11
Implementation
12
Control
if (dataInBufC0()){
fscanf(&USB_str,"%c",&read);/* Smart Stuff */
}
for (uint8_t i=0;i<=18;i++) setServoPosition(i,position[i]);
Serial (Temporary) – needed to determine motion domain per servo(a) and allowed relative position of adjacent legs (b)
Wait
Process
Do
13
Current StatusMechanical platform: completed (ish)Power: 3 sell 4 Ah Lipo, protected by
voltage monitor (and my reaction time)
14
Current StatusMechanical platform: completed (ish)Power: 3 sell 4 Ah Lipo, protected by
voltage monitor (and my reaction time) Sensors: Sonar, 2x IR rangefinder,
BlueSmirf, IR transmitter - on orderBoard: Epiphany DIY

15
Current StatusMechanical platform: completed (ish)Power: 3 sell 4 Ah Lipo, protected by
voltage monitor (and my reaction time) Sensors: Sonar, 2x IR rangefinder,
BlueSmirf, IR transmitter - on orderBoard: Epiphany DIYStatus Update: LCD, work in progressImaging: GalaxyS2 – work in progress
16
Sensor Feedback
Use low level sensors (Sonar, IR) to move about and avoid obstacles (possibly do primitive mapping?)
Use camera to search for a box
17
Sensor Feedback
Use low level sensors (Sonar, IR) to move about and avoid obstacles (possibly do primitive mapping?)
Use camera to search for a box
If I can find a box, I will search for a TV
If I can find a TV, I will use IR transmitter to turn it on/off
18
Questions?
19
Questions?
Answer: All you base are belong to us