Embed Size (px)
Citation preview

E-proceedings of the 38th IAHR World Congress September 1-6, 2019, Panama City, Panama
doi:10.3850/38WC092019-0230
1692
THE FISHPROTECTOR – AN INTEGRAL FISH PROTECTION SYSTEM
RUBEN TUTZER(1), BARBARA BRINKMEIER(2), BERNHARD ZEIRINGER(3), SIMON FÜHRER(4), GÜNTHER UNFER(5) & MARKUS AUFLEGER(6)
(1, 2, 6) Unit of Hydraulic Engineering, University of Innsbruck, Innsbruck, Austria
[email protected]; [email protected]; [email protected] (3, 4, 5) Institute of Hydrobiology and Aquatic Ecosystem Management, University of Natural Resources and Life Sciences, Vienna, Austri a
[email protected]; [email protected]; [email protected]
ABSTRACT
A new, integral fish protection system for medium to large sized hydropower plants, which combines the advantages of a physical and a behavioral barrier, is introduced in this paper. The FishProtector is based on horizontally arranged steel cables. These are installed in front of the turbine inlet in a way that fish are protected and guided to a bypass system. At the same time, the cables are used as electrodes to create an electric field in the adjacent waterbody. The fish protection efficiency as well as the guiding efficiency of the system were quantified and assessed in ethohydraulic experiments for various potamodromous species. Further, the behavior of fish in close proximity to the FishProtector was observed and classified using underwater cameras. The results of the ethohydraulic experiments show, that the electric field around the steel cables acts as a behavioral barrier causing very high fish protection rates and enables a larger spacing between individual cables while maintaining the fish protection rates. Further, fish are guided along the FishProtector, showing a typical behavior pattern in close proximity to the hybrid barrier. Verified by a huge number of empirical data, the knowledge stock in terms of downstream fish migration and fish behavior in close proximity to a barrier could be increased.
Keywords: Sustainable Hydropower, Fish Protection, Fish Migration, Fish Behavior, Ethohydraulic Experiments
1 INTRODUCTION
The need for an effective fish protection system for hydropower plants was identified with a better ecological and biotic understanding of rivers as valuable ecosystems and triggered by the European Union with the introduction of the EU Council Directive 2000/60/EEC (Water Framework Directive) in the year 2000. It is quite evident, that hydropower plants, which interrupt the longitudinal continuity, could negatively affect the aquatic habitat if no compensatory measures are provided (Böttcher, et al., 2015) (Schwevers, 2000). Especially for aquatic organisms, a fragmented river could be a major problem due to the limited migration possibility, changes in the hydraulic conditions and changes in the morphology and the aquatic habitat (Keuneke & Dumont, 2013). Basically, all aquatic organisms perform migration movements depending on available resources, the period of life and the time of the year, to mention only some of many possible migration triggers (BMLFUW, 2012). While the upstream migration of fish has been object of research for a long time and various measures have proved successful, the state of knowledge in terms of fish protection and downstream migration bypassing hydro power plants has to be increased. Especially for medium to large sized hydro power plants, effective mitigation measures in terms of fish protection and downstream migration are largely missing. The main problem is, that fish orient themselves after the mainstream, which goes under normal conditions straight through the turbines. The turbine passage could harm or even kill fish due to different mechanisms, depending on the turbine type, the size, the rotational speed and many more factors. To prevent a turbine passage right from the beginning, structural barriers could be used as a physical barrier. Depending on the size of fish to be protected, very fine screens (spacing < 20 mm) may be required in order to prevent migrating fish from a turbine passage (Ebel, 2018). This could cause high costs in construction and operation and could lead also to substantial energy loss if not used and cleaned properly. As a result, they are used commonly only for small hydro power plants (Böttcher, et al., 2015).
The fact, that no cost effective and well performing fish protection measure for medium to large sized hydro power plants is available encouraged the Unit of Hydraulic Engineering at the University of Innsbruck to develop a new, integral fish protection system, which combines a physical barrier with a behavioral barrier. The result is the FishProtector, which acts as a hybrid barrier.

E-proceedings of the 38th IAHR World Congress September 1-6, 2019, Panama City, Panama
1693
2 PROTECTION PRINCIPLE OF THE FISHPROTECTOR
The FishProtector represents an integral fish protection system which combines a physical barrier (horizontally arranged steel cables) with a behavioral barrier (electric field). With this new fish protection system, fish are protected from a turbine passage, which implicates specific mortality rates, and are guided simultaneously to a safe downstream migration corridor (for example a bypass system). The symbiosis of the physical barrier and the behavioral barrier makes the FishProtector a hybrid barrier, combining the advantages of the two different systems. The horizontally arranged steel cables, which constitute the physical barrier, are used at the same time as electrodes, inducing an electric field to the water. Due to the moderate electric field, the spacing between the steel cables can be enlarged while maintaining high fish protection rates. At the same time, fish show a controlled escape reaction entering the electric field and show a general avoiding effect coming close to the mechanical barrier. In combination with the orientation of the FishProtector fish could be guided towards the bypass system. Therefore, a safe downstream migration could be expected without any time delay for fish (Aufleger, et al., 2017).
Figure 1. Possible layout of the FishProtector (here: electric flexible fish fence) at hydro power plants
(Brinkmeier et al., 2017)
3 METHODOLOGY
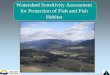
3.1 Experimental facility The ethohydraulic experiments were conducted in the year 2017 (August – November) at the HyTEC
(Hydromorphology and Temperature Experimental Channel) facility in Lunz am See, Austria, that belongs to the Institute of Hydrobiology and Aquatic Ecosystem Management, University of Natural Resources and Life Sciences, Vienna. The facility consists of two parallel, 40 m long channels. Water for the ethohydraulic experiments is taken via two pipes from Lake Lunz, which is located upstream. Due to restrictions concerning water abstraction from the lake, a constant water amount of 250 l/s was taken. To ensure appropriate flow conditions within the experimental channel, a pump with a capacity of 400 l/s was installed upstream of the second flume, which served as a reservoir (see figure 2). A respective amount of water was returned from the experimental into the second channel via a pipe at the downstream part. Hence, the total discharge in the experimental channel for all ethohydraulic experiments was about 650 l/s and the mean flow velocity resulted in 0.43 m/s. Over the testing period, the water temperature was in the range from 8 to 13° Celsius.
To ensure steady hydraulic conditions within the experimental channel, the water (lake and recirculated water) flows over a weir into the experimental channel. This section is followed by a start-up length of approximately 20 m (after 10 m the channel gets constricted to its intended width of 3.0 m) before the experimental area begins with the adaption area. The water depth was 0.5 m, adjusted by weirs, located downstream the experimental area. Further, the channel substrate consisted of fine gravel.
To mitigate external influences (e.g. shading, birds, weather effects), the experimental area was covered.

E-proceedings of the 38th IAHR World Congress September 1-6, 2019, Panama City, Panama
1694
Figure 2. HyTEC facility: experimental channels with schematic water circulation during the ethohydraulic
experiments with a green foil covering the experimental area
3.2 Fish species For the ethohydraulic experiments, wild fish out of four different species, brown trout (Salmo trutta), rainbow
trout (Oncorhynchus mykiss), grayling (Thymallus thymallus) and chub (Squalius cephalus) with a body length between 10 and 25 cm, were used. Flow conditions and water temperature during conducted experiments were suitable for mentioned species (Jungwirth, et al., 2003).
All individuals were marked with a PIT-tag (Passive Integrated Transponder – tag). Accordingly, a clear identification of every single individual was possible. To prevent learning effects, fish had a minimum rest period of one week.
For every experiment 15 individuals of each species were randomly chosen. Brown trout and rainbow trout counted in this context as one species. Hence, in every single experiment 45 fish were used.
3.3 Experimental setup The experimental setup is shown in figure 3. The core of the ethohydraulic experiments is the FishProtector
with its corresponding control unit and the downstream situated bypass system. This hybrid barrier is located in the 3.0 m wide experimental channel. The used FishProtector is a prototype, built especially for these ethohydraulic experiments, with steel cables of 8 mm diameter, tensioned within a frame. The length of the FishProtector as well as the cable clearance are variable as it is shown subsequently. Of crucial importance in this context is the control unit Neptun from PROCOM SYSTEM S.A. which supplies the FishProtector with a pulsed direct current and 80 Volts in this very special case. Next to the control unit, also the available 0.5 m wide bypass system is important, because it describes the arrangement in practice. However, the main focus of the present study was the fish protection and the fish behavior along the FishProtector. Therefore, the bypass system was not optimized, once it was built. Anyway, the bypass system was implemented as a natural extension of the FishProtector with a non-turbulent current into the bypass system and covered edges.
At the end of the bypass system and at the end of the main channel a fine meshed grid completed the testing area, which prevented fish migrating further downstream. The before mentioned weirs were situated behind this grids. During the experiments the fish could swim only within the test area. Upstream, the testing area was limited by the adaption area, which consists of two fine meshed grids. The first grid in downstream direction was fixed and was the upstream limit of the test area. The second grid could be removed by a cable pull from behind to not disturb fish after the adaption time, when the test started.
In order to establish an adequate observation and quantification, two different technologies were used. To observe the basic fish protection rate of the FishProtector, the PIT-tag technology was applied. As described in chapter 3.2 every fish got a PIT-tag with a specific number implanted. If a fish passes an antenna, the number of the tag gets registered. In the present study, three antennas (see figure 3, A1 - A3) were installed. One antenna was located behind the FishProtector and two antennas were located in the bypass system.
Experimental channel
Water reservoir channel
Lake Lunz (approx. 300 m upstream)
Pump

E-proceedings of the 38th IAHR World Congress September 1-6, 2019, Panama City, Panama
1695
Consequently, fish passing the FishProtector and fish swimming into the bypass system could be detected. Using this technology the global fish protection rate of the FishProtector could be quantified.
To gather information of the fish behavior in close proximity to the FishProtector, up to three underwater cameras (see figure 3, C1 - C3), were used. Furthermore, the whole testing area was filmed in downstream direction during all ethohydraulic experiments.
Figure 3. General setup of the ethohydraulic experiments with the FishProtector and the corresponding
control unit, the adaption area, the bypass, the PIT-tag antennas (A1, A2, A3) and the cameras (C1, C2, C3) – the blue arrow indicates the flow direction
The main focus, performing the ethohydraulic experiments, was put on the different parameters of the FishProtector as shown below and on the reaction fish showed due to a certain set of combinations. Evaluating different parameter combinations, the fish protection rate as well as the guiding effect and the general behavior near the hybrid barrier was taken into account. In order to find proper parameter combinations, the following parameters were varied:
Angle of the FishProtector
40 ° (length of the barrier 3.9 m)
20 ° (length of the barrier 7.3 m)
Cable clearance
30 mm
60 mm
Size of the electric field
No electric field (control)
Small electric field (reaching approx.10 cm upstream)
Big electric field (reaching approx. 20 cm upstream)In figure 4 the setup is shown more in detail. The adaption area (A) with the fine meshed grids limiting the
area and preventing fish from jumping out of the adaption area is shown as well as the two possible angles of the FishProtector with the resulting lengths of 3.9 m and 7.3 m, respectively (B and C). Additionally, the cable clearance of the FishProtector is visible (60 mm in picture D) as well as the bypass entrance at the downstream end of the FishProtector.
Adaption area
Control unit
FishProtector
C 1
A 3
A 2
A 1
C 3
C 2

E-proceedings of the 38th IAHR World Congress September 1-6, 2019, Panama City, Panama
1696
Figure 4. Detailed setup of the ethohydraulic experiments with A: Adaption area; B: Detailed overview of the
FishProtector and the bypass system; C: 20° angled FishProtector; D: 40° angled FishProtector. The blue arrow shows the flow direction.
3.4 Experimental procedure The experiments were performed in the year 2017 from August until November, during day. Every test run
lasted for one hour. Before the test run started, 45 fish (15 fish from the species trout, grayling and chub) were randomly chosen and their PIT-tag number was recorded. Afterwards, they were put into the adaption area for half an hour. After the adaption time, the fine meshed grid bordering the testing area was lifted carefully by a cable pull in a way that fish behavior was not influenced. This moment was the start of the one hour test run.
3.5 Evaluation The main objective of the present research work was to evaluate the FishProtector regarding its fish
protection rate, its guiding efficiency and the general fish behavior in close proximity to the hybrid barrier. To find the best possible solutions regarding the alterable parameters angle, cable clearance and electric field (see chapter 3.3) at least 5 independent experiments for each of the 12 possible setup combinations were performed. First of all, the experiments were checked for their validity. Possible examples for invalid experiments are experiments highly influenced from the outside or experiments with setup problems. In a second step, the PIT-tag data and the video data of each test were checked for completeness and accuracy. Evaluating the ethohydraulic experiments, the two before mentioned monitoring technologies were considered. This made the evaluation a highly complex but integral process. It enabled the evaluation of different parameter combinations as well as the fish behavior in close proximity to the FishProtector. In addition, it was also possible to crosscheck the results of the two methods due to their partial overlapping.
The evaluation was performed in four steps. First of all, the general fish protection rate of the FishProtector was investigated. Then the guiding efficiency of different parameter combinations of the FishProtector was assessed. Subsequently the fish behavior in close proximity to the FishProtector was classified and evaluated. Finally, the activity of fish during the ethohydraulic experiments and depending on the parameter combination was examined. Throughout the evaluation, the used fish species and the length distribution were considered. In doing so, the two following technologies were used:
A B
C D

E-proceedings of the 38th IAHR World Congress September 1-6, 2019, Panama City, Panama
1697
Table 1. Comparison of the two evaluation methods
PIT-tag technology
Three antennas located in the test area; one behind the FishProtector, two in the bypass system
Previously defined categories for a standardized evaluation:
Fish passes through the FishProtector
Fish swims into the bypass system
NeitherOnly the first action of each fish counts Recognizing each individual – information on species and length Little information on fish behavior Little evaluation effort Objective evaluation criteria
Video Data
Up to three cameras record the whole testing area
Previously defined categories for a standardized evaluation:
Fish passes through the FishProtector
Fish swims into the bypass system
Fish guiding – fish swims along the FishProtector up- or downstream
Fish shows a controlled escape reaction due to the electric field
Fish swims from the FishProtector upstream without showing a controlledescape reaction
Action-based evaluation (sum of all counted actions in a test within the defined categories – every action counts) Information on fish behavior – reaction to the FishProtector Incomplete information on species No information on length Considerable evaluation effort Results potentially influenced by the subjective assessment of evaluators
To observe and quantify the general fish protection rate, the PIT-tag technology was used. This is suitable, because only the first action of each fish counts. This represents the situation in practice best. Due to the setup (antenna behind the FishProtector) the fish protection rate is defined as sum of fish which do not pass the FishProtector within the ethohydraulic test. The results of the PIT-tag based evaluation were crosschecked using the video data.
For the evaluation of the guiding efficiency depending on different parameter combinations as well as for the fish behavior in close proximity to the FishProtector, the video data was used. The results using this evaluation method are an integral understanding of fish behavior in close proximity to the hybrid barrier. The results of the two PIT-tag antennas in the bypass are again used to crosscheck the category fish swims into the bypass system which could be further used as an indicator for the guiding efficiency.
To evaluate the distribution of actions within the time frame of the ethohydraulic experiments, the PIT-Tag data were used again, because of their accuracy. The experimental time (1 hour) was divided into 10 minutes steps and the distribution of the detected actions were checked. To evaluate the actions as a function of the parameter combination, the video data was used, because the defined categories in close proximity to the FishProtector as well as the sum of all counted actions are of crucial importance.
4 RESULTS
4.1 Fish protection rate Fish protection is shown as an overview of all species and all applied parameter combinations performed
during the ethohydraulic experiments and is shown as a percentage of fish passing through the FishProtector. The less fish pass through the barrier, the better is the fish protection (see figure 5).
The control experiments (in figure 5, white) are the first to discuss. Control experiments mean in this context that the independent ethohydraulic experiments were performed without an electric field around the tensioned steel cables (ethohydraulic experiments with a physical barrier only). The closer the single cables are (dense physical barrier), the less fish pass through the barrier and the higher the fish protection rate is.
If the control experiments are compared to the ethohydraulic experiments with an electric field (hybrid barrier), there are two main results to highlight. First, the fish protection rate is much higher if a hybrid barrier (combination of tensioned steel cables and an electric field) is applied. The fish protection rate for the hybrid barrier is higher than 95 % for all setups. Second, the difference regarding the fish protection rate as a function of the cable clearance disappears. This means again that the fish protection rates for the investigated cable clearances (30 and 60 mm) are the same.

E-proceedings of the 38th IAHR World Congress September 1-6, 2019, Panama City, Panama
1698
Further it is to mention that neither the size of the electric field nor the angle of the FishProtector (20° or 40°) does affect the fish protection rate significantly.
Figure 5. FishProtector passage regarding the 12 different setups with the angle [°], the cable clearance
[mm], the electric field (no electric field = control test [white], small electric field [yellow], big electric field [grey]) and the number of independent experiments per setup [N].
As it is already mentioned above, the fish protection rate is on the same high level for both cable clearances (30 and 60 mm) if an electric field is applied. This is shown in figure 6 more in detail. Again, a huge difference in the FishProtector passage rate regarding the cable clearance is identified for the control experiments (physical barrier only). Applying an electric field (hybrid barrier), no significant difference between the two cable clearances is recognizable and the fish protection rate is higher than 95 %.
Figure 6. FishProtector passage regarding the cable clearance. The angles (20 and 40°) are merged because
of minor difference (no electric field = control test [white], small electric field [yellow], big electric field [grey]) and the number of independent experiments per setup [N].

E-proceedings of the 38th IAHR World Congress September 1-6, 2019, Panama City, Panama
1699
All three species used in the experiments (chub, trout, grayling) show the same general behavior pattern regarding the FishProtector passage rate. If the hybrid barrier was used, the protection rate is on the shown high level (> 95 %). A slight difference could be found regarding the species in control experiments (physical barrier only). Whereas the species chub and grayling show the high above mentioned passage rates using a physical barrier only, trouts show a distinct lower passage rate for the same setups. It can be assumed, that the used physical barrier deters trouts more easily than chubs or graylings.
Regarding the fish length, no dependence could be found in the protection rate. This is reasonable, because all used fish belong to one category of fish length from 10 to 25 cm.
All mentioned results were crosschecked and verified by video data.
4.2 Fish guiding efficiency To ensure a safe downstream migration without a lag in time, a good guiding efficiency along the
FishProtector is required. The evaluation of the fish guiding efficiency, as a function of the applied parameter combinations, was performed basically by video data with the consequence that the guiding efficiency is shown as the relative quantity of counted fish activity along the FishProtector (sum of guiding activities per number of fish per test).
All experiments show that the cable clearance is crucial for the guiding efficiency. The FishProtector with a cable clearance of 30 mm showed a better guiding efficiency compared to the FishProtector with a cable clearance of 60 mm. It seems that fish swim along physical barriers and use them for orientation. However, also for the cable clearance of 60 mm the guiding efficiency could be proved over the experimental time of one hour. Regarding the other parameters, it has to be mentioned that the angle of 40° is performing slightly better than the angle of 20° regarding the guiding efficiency. The application of any electric field does not affect the guiding efficiency significantly compared to the control experiments without electric field.
Regarding the used fish species, chubs show, compared to trouts and graylings, a distinct higher guiding rate using a cable clearance of 30 mm. This effect disappears almost completely by using a cable clearance of 60 mm. It seems that chubs respond more sensitive to physical barriers and use them also for orientation.
4.3 Fish behavior
The evaluated fish behavior (derived from video analyses), classified using the five pre-defined categories
(see table 1), will be shown subsequently. In general, chubs show the highest activity during the experiments,
especially using a cable clearance of 30 mm. The fish protection is at the same level for all species, using the hybrid barrier. Fish seems to react earlier
using a larger electric field and has therefore some advantages, especially concerning interacting swarm behavior.
As already mentioned in chapter 4.2, chubs show a distinct higher guiding rate, compared to trouts and graylings, using a cable clearance of 30 mm, but is not confirmed. Exactly the same effect is reflected by the category fish swims into the bypass system. The general fish guiding efficiency, as well as the category fish swims into the bypass system show better results with a cable clearance of 30 mm compared to a cable clearance of 60 mm for all species.
Regarding the categories fish shows a controlled escape reaction due to the electric field and fish swims from the FishProtector upstream without showing a controlled escape reaction no significant difference neither for all species nor for any different parameter combinations could be detected. In general, the following derivations can be cited from the experiments:
Fish are approaching the hybrid barrier slowly in a rheoactive swimming position
Fish clearly react when entering the electric field and finally move back upstream showing a controlledescape reaction
Due to the moderate electric field, fish do not have the time to check the FishProtector, show insteadthe already mentioned controlled escape reaction but come again close to the hybrid barrier
The arrangement of the FishProtector guides fish step by step to the bypass system, showing thecontrolled escape reaction several times or swimming more or less parallel to the physical barrier at theborder of the electric field
4.4 Fish activity The activity of fish is a good indicator for the comparability of the individual ethohydraulic experiments.
Therefore the fish activity was investigated regarding the time of the year, the used setups and eventual learning effects. Also the distribution of activities regarding the time, when an activity was set within the individual experiments, was checked. Differences between species in activity are shown in chapter 4.3. No significant difference could be recognized regarding the time of the year.
Regarding the used setups it could be ascertained that a distinct physical barrier (cable clearance = 30 mm) stimulates higher fish activity. This effect concerned especially the category fish guiding, because fish swim

E-proceedings of the 38th IAHR World Congress September 1-6, 2019, Panama City, Panama
1700
along the FishProtector in up- and downstream direction more likely if the physical barrier is distinctive, as it could be shown already in chapter 4.2.
No learning effect regarding the reaction or the behavior of fish in close proximity to the FishProtector could be observed. Over all experiments there is the same passage rate through the FishProtector and the same distribution of actions within the experiments, only as a function of the setup. However, the activity rate in the first setup is especially high. This could mean a slight but negligible tiring effect of fish.
5 CONCLUSIONS
As shown in ethohydraulic experiments, the FishProtector has great potential regarding fish protection and fish guiding. The fish protection, using the FishProtector as a hybrid barrier is on a very high level (> 95 %), even if a cable clearance of 60 mm is used. The combination of the steel cables as a physical barrier and the electric field as a behavioral barrier shows its full potential, combining the positive aspects of both technologies. This was also confirmed by video analyses.
Fish are approaching the hybrid barrier slowly in a rheoactive swimming position. Entering the electric field (behavioral barrier), fish clearly react and show a controlled escape reaction in upstream direction. The arrangement of the FishProtector guides fish step by step to the bypass system, showing the controlled escape reaction several times or swimming more or less parallel to the physical barrier at the border of the electric field.
The size of the electric field is not of essential importance for the fish protection rate, neither for the fish guiding efficiency nor for the fish behavior in close proximity to the FishProtector. Nevertheless, a larger electric field (20 cm) showed some advantages compared to a smaller electric field (10 cm). The main advantage of a larger electric field is the earlier warning of fish, which has the consequence of a larger distance to the physical barrier of the FishProtector. This again prevents escape reactions into the wrong direction, especially concerning interactive fish swarms.
The guiding efficiency seem to depend on cable clearance. The experiments have shown that the cable clearance of 30 mm lead to greater guiding potential along the FishProtector compared to the cable clearance of 60 mm. Nevertheless, the guiding efficiency could be proved also for a cable clearance of 60 mm.
The FishProtector can be made applicable for various locations and rivers, as the main parameters (cable clearance, angle of inclination, size of electric field) can be adapted to the specific needs of the fish species. It represents a possible solution for fish protection and downstream migration at hydro power plants of all sizes.
6 OUTLOOK
Currently, the application of the FishProtector at two hydro power plants is been prepared.
ACKNOWLEDGEMENTS
We appreciate the funding of the research project by The Austrian Research Promotion Agency (FFG) and the excellent cooperation with our project partners Institute of Hydrobiology and Aquatic Ecosystem Management (IHG), University of Natural Resources and Life Sciences, Vienna; Albatros Engineering GmbH and IUS Weibel & Ness GmbH.
REFERENCES
Aufleger, M., Böttcher, H., Brinkmeier, B., Unfer, G., & Zeiringer, B. (2017). Electrified Flexible Fish Fences. Proceedings of the 37th IAHR World Congress, Kuala Lumpur, Malaysia, S. 2696-2700.
BMLFUW. (2012). Leitfaden zum Bau von Fischaufstiegshilfen. Wien: Bundesministerium für Land- und Forstwirtschaft, Umwelt und Wasserwirtschaft.
Böttcher, H., Unfer, G., Zeiringer, B., Schmutz, S., & Aufleger, M. (2015). Fischschutz und Fischabstieg - Kenntnisstand und aktuelle Forschungsprojekte in Österreich. Österr Wasser- und Abfallw, pp. 299-306.
Brinkmeier, B., Böttcher, H., Tutzer, R., & Aufleger, M. (2017). Fish Protection using Electric Flexible Fish Fences. Proceedings of 2017 HYDRO, Sevilla.
Ebel, G. (2018). Fischschutz und Fischabstieg an Wasserkraftanlagen - Handbuch Rechen- und Bypasssysteme. Ingenieurbiologische Grundlagen, Modellierung und Prognose, Bemessung und Gestaltung. Band 4. Halle (Saale): Büro für Gewässerökologie und Fischereibiologie Dr. Ebel.
EU. (2000). Richtlinie 2000/60/EG des Europäischen Parlaments und des Rates vom 23. Oktober 2000 zur Schaffung eines Ordnungsrahmens für Maßnahmen im Bereich der Wasserpolitik. .
Jungwirth, M., Haidvogel, G., Moog, O., Muhar, S., Schmutz, S. (2003). Angewandte Fischökologie an Fließgewässern. Stuttgart.
Keuneke, R., & Dumont, U. (2013). Wasserkraft und Wasserrahmenrichtlinie - eine Flussgebietsstrategie. WasserWirtschaft 1/2.
Schwevers, U. (2000). Biologische Mechanismen der Fischabwanderung. Wasser & Boden 52. Jahrg.