Embed Size (px)
Citation preview
G r u m m a n R e s e a r c h D e p a r t m e n t M e m o r a n d u m RM- 386
PARAMETERIZATION OF THE SET OF P O S I T I V E - D E F I N I T E MATRICES
- AND AN ALGORITHM FOR ITS GENERATION
D. Rothschild
and
G . R . G e i s s
S y s t e m s Research Sect ion
N o v e m b e r 1967
T h i s w o r k w a s p e r f o r m e d under C o n t r a c t NAS 2-4063 f r o m NASA A m e s Research C e n t e r and C o n t r a c t NAS 8-20306 f r o m NASA G e o r g e C . Marshall Space F l i g h t C e n t e r .
- l e C h a r l e s E . Mack, Jr. D i r e c t o r of R e s e a r c h
https://ntrs.nasa.gov/search.jsp?R=19680004145 2020-06-06T20:22:32+00:00Z
ABSTRACT
An algorithm is presented f o r generat ing the s e t of n x n
pos i t i ve -de f in i t e symmetric matrices, based on t h e choice of
a r b i t r a r y parameters. n(n + 1) 2
T h i s method was developed as a necessary s t e p i n t h e de-
velopment of an approach t o t h e problem of est imat ing t h e domain
of a t t r a c t i o n of an equilibrium so lu t ion t o a system of nonl inear
autonomous d i f f e r e n t i a l equations. The technique however, i s
genera l , and may be appl ied t o any problem requir ing t h i s type
of matr ix .
ii
TABLE OF CONTENTS
Page - I t e m - Introduction ............................................. . 1
2
8
9
10
Development of the Numerical Algorithm ................... Computer Program ......................................... References ............................................... Appendix - Lis t ing of Computer Program ...................
iii
INTRODUCTION
In conjunction with research being done on the formulation
of numerical techniques f o r es t imat ing the domain of a t t r a c t i o n
of an equi l ibr ium so lu t ion t o a nonl inear dynamical system, t he
need arose for an e f f i c i e n t a lgori thm t o generate a s e t of
n x n pos i t i ve -de f in i t e symmetric matrices. These matrices can
be used as candidate "Q" matrices which i n turn give r ise t o
associated "P" matrices through the so lu t ion of the Liapunov
equation, A P + PA = - Q. Having parameterized the Q set, T
one can proceed i n an order ly fashion i n pursu i t of an "opt imal"
quadrat ic form Liapunov function t o resolve the domain of sta-
b i l i t y problem (see Ref. 1).
Another problem area f o r which t h i s matrix generat ion tech-
nique has p o t e n t i a l appl icat ion i s i n the c l a s s of opt imizat ion
problems where the so-called conjugate d i r ec t ion methods are
employed (Refs. 2 and 3 ) . In many of these methods, the i n i t i a l
a r b i t r a r y o r random choice of a pos i t i ve -de f in i t e symmetric
matrix i s required.
This memorandum discusses a procedure and associated computer
program f o r s a t i s f y i n g the above requirements.
1
DEVELOPMENT OF THE NUMERICAL ALGORITHM
The generat ion of t h e s e t of pos i t i ve -de f in i t e n x n sym-
metric matrices can be car r ied out by r e s o r t i n g t o the b ru te force
approach of forming an a r b i t r a r y symmetric matrix and then
applying the determinantal test (Ref. 4 ) f o r pos i t ive-def in i teness .
n x n
n(n + 1) matrix elements followed by the The a r b i t r a r y choice of 2
evaluat ion of the determinants of the n-pr incipal minors would
be necessary. It would be des i rab le t o generate these matrices
by a procedure t h a t guarantees a l l t o be pos i t i ve -de f in i t e , and
i n addi t ion, t h a t the e n t i r e set of pos i t i ve -de f in i t e matr ices be
spanned.
It i s w e l l known (Ref. 4 ) t h a t a l l real symmetric matrices
are or thogonal ly s i m i l a r t o a diagonal matrix, and t h a t a l l posi-
t i v e - d e f i n i t e (pd) matrices are then orthogonally s i m i l a r t o a
diagonal matrix with posi t ive-diagonal elements; i . e . , l e t Q be
pd, then
(1) T Q = S A S ,
where
Ai > 0 , i = 1, 2, ..., n
T S S = I .
2

Thus, the parameterization of all pd matrices, Q, is reduced
to the parameterization of the group of orthogonal matrices, S.
In Ref. 5, Murnaghan proves that the parameterization of the
group of n x n unitary matrices U is accomplished by the fac-
torization
U = D
where
11-1
I I 'n-k k= 1
= D x Un-l x ... x u1 ,
D = diag iE1 , e itj2 , ,.., e "n-1, ei'n} ,
'k r:
Y =
n- 1
(2n - k)(k - 1) + 2
(2n - k)(k - 1) + P = 2 l + n - a ,
(2n - k - 2 ) ( k - 1) 2 + (n - 0 9 v =
( 3 )
(4)
( 5 )
3
ii
Ukk = cos 0
= COS e a a
u = O , i # j , i , j # k , 4 I i j - i o uka = - e s i n 8
uak = + e s i n t) ,
The f a c t o r i z a t i o n of the group of orthogonal matrices is imme-
d i a t e l y obtained by requir ing U t o be real; i .e.,
S = D1 In; k= 1 'n-kl '
= diag {I, ..., 1, k 1) , Dl
6 = 0 = 0 ,
In p a r t i c u l a r ,
(7)
(2n - k - 2)(k - 1) c L = 2 + n - 4 .
4

(n - 1) (n - 2) t he t a s and n phis , 2 This f a c t o r i z a t i o n contains
o r a t o t a l of
Eq. (2) raise the number of parameters t o 2 + 1, o r one
n(n - 1) 2 + 1 parameters. The n lambdas i n
n(n + 1)
more than required. Thus, i f w e r e s t r i c t S t o be a r o t a t i o n
matrix ( i . e . , choose - p(n + 1)
2 matrix. The choice 'pn = 0 i s i n t u i t i v e l y motivated by the con-
s i d e r a t i o n t h a t w e wish t o r o t a t e and sca l e the e l l i p s o i d associated
'pn = 0) , t he number of parameters w i l l be
, the number required t o represent an a r b i t r a r y symmetric
with the quadrat ic form formed from the pd matrix and do not
want t o r e f l e c t coordinates o r change the handedness of the co-
ord ina te sys tem.
The f a c t o r i z a t i o n of a pd matrix of dimension chree i s thus
given by
(10) T P = S A S ,
where
> 2 A
0
i A = i o
and
5

- S O
c(pl = cos cpl , scpl = sin (pl
Thus, it is clear that by using this representation under the
restrict ions
A > o i i = 1, 2, ..., n
- 7 7 - < ' p i < - T , i = 1, 2, ..., n - 1 - (n - 1) (n - 2)
2 7T -T
9 - - < O i < 2 , i = 1, 2, ..., 2 , -
the candidate Q matrices are guaranteed to be positive-definite.
The constraints, Eq. ( 1 4 ) , can be removed by defining:
6
I I 1
“‘i A = e i
1 I
i i 8 = ?(- I- + 0 mod 2 ~ ) ,
q,. real 9
I
1
1 0 . real
! s only appear as arguments of ‘i and recognizing that since the
trigometric functions, they can be arbitrary real numbers.
7
COMPUTER PROGRAM
A computer program which implements t he preceding numerical
a lgori thm has been developed and i s being used i n conjunction with
t h e problem of f ind ing an " o p t i m a l " quadra t ic Liapunov funct ion
f o r a gth order quas i - l inear d i f f e r e n t i a l equation. The dimen-
s ion of the problem, however, i s read a s data and i s a r b i t r a r y .
To use t h e program, one must spec i fy the parameters: ql; 1 1 1
q2;
t i o n s of Eq. (15) hold. The names given t o these a r r a y s are:
... 'ln; ol ; e2; 0 . . Qk; Cpl; (P2; ... C p n - l ' where t h e r e s t r i c -
q a r ray E XLAM (I)
1 8 a r ray E THETA (I)
cp a r ray =- PHI (I) . I f it i s des i red t o p r i n t out t he orthogonal matrix,
i s used i n Eq. (ll), t h e cont ro l va r i ab le PP i s set equal t o
1.0, otherwise it i s set equal t o zero. This matrix [SI i s
c a l l e d B ( 1 , J) i n the program. The f i n a l requi red output of
t h e program i s Q ( I , J ) , a n n x n pos i t i ve -de f in i t e symmetric
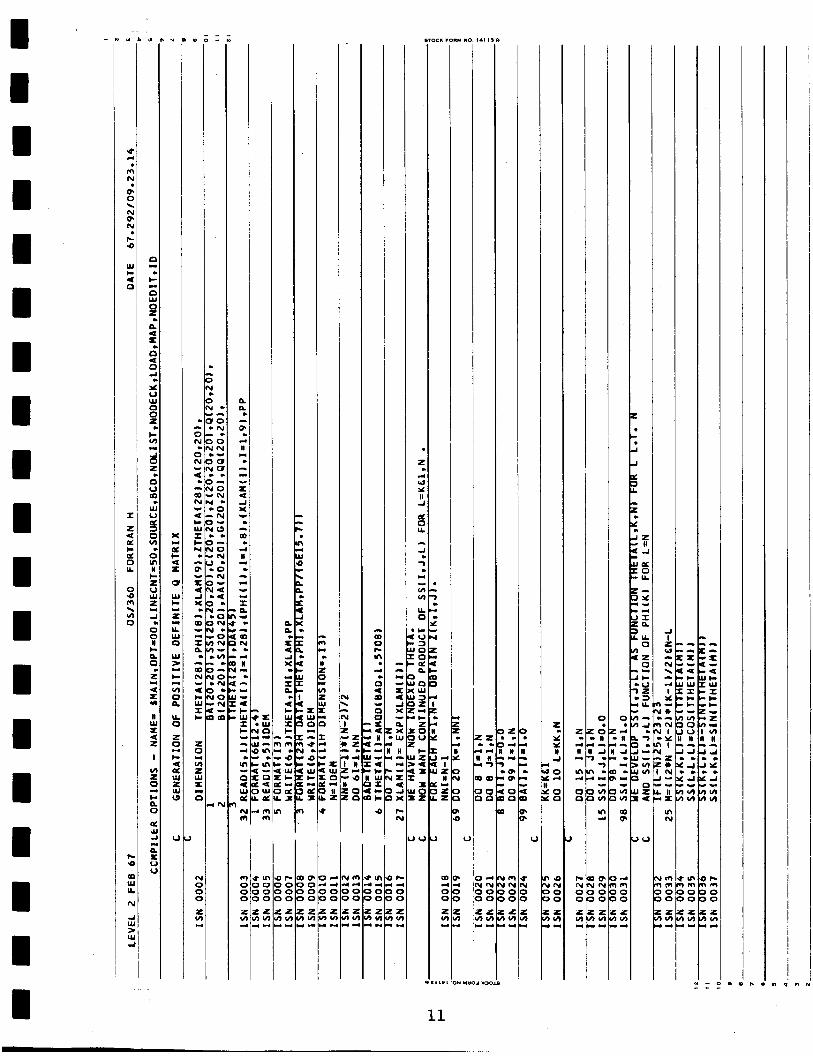
matrix. Enclosed i n the appendix i s t h e complete computer pro-
gram l i s t i n g .
S, which
REFERENCES
1. Geiss, G . R . and Abbate, J. V . , Study On Determining S t a b i l i t y Domains f o r Nonlinear Dynamical Systems, Grumman Research D e - partment Report RE-282, February 1967.
2. Kel ley , H. J . and Myers, G . E . , Conjugate Direction Methods f o r Parameter Optimization, presented a t 18th Congress of t h e I n t e r - na t iona l Astronaut ical Federation, Belgrade, Yugoslavia, 1967.
3 . Kopp, R. E . , M c G i l l , R., Moyer, H. G . , and Pinkham, G . , "Several Tra jec tory Optimization Techniques," i n Computing Methods i n Optimization Problems, A. V. Balakrishnan and L. W. Neustadt, Edi tors , Academic Press, New York, N . Y . , 1964.
4 . Gantmacher, F. R . , The Theory of Matrices, V o l . I, Chelsea Pub- l i s h i n g Co., New York, 1959.
5. Murnaghan, F . D . , Lectures on Applied Mathematics, Vol. 111: The Unitary and Rotation Groups, Spartan Books, Washington, D . C . , 1962.
APPENDIX
LISTING OF COMPUTER PROGRAM
10
I > -
I - - ,
Y W
> ! 4
I C
> C J e
) C
b - J C . e 4 . C .* a -
a -
2 . C .P a . 4 *
a 3 - * C
r C
7 - *c!
.- L O
..I
t C
:' ?I
-.
a - r r J C
>
t . :: a o
d r
n I
t I
5: 5
L.
0
a
n
4
4 0 4
s u ILI 0 0
. T !7l
5
?
c. -I 0
0 u
u u
Q VI 0 m u I- 2 u Ly
4
a a I-
a
i5
a ? E
L U
)I Ly I z I VI 2
c P a
iy i
P L u U
3 a
a
: a
I
I I I I I I I I I I I I I I I I I I
.o 4 I m N
m 0 \ N 0 N
e- 9
w I- 4 a
.
.
T z 1* I- * 0 lb
0 9 m \ VI 0
a
* 9
a Ly U
n - U > U -
\
J 4
? . L L * t
5 :
: L . i I I - I r u
E - h 4 r l ' - 4
c c LW.
L 3
ac c
I-
r u
J a
n
C
C
n
n w
4 e
4 c U I c h
n - - 0
I 4
x
- -
4 - a
a
a n
- L 1
I - - 4 c z
2 C
U I U
C
. I
>
n C C
7 .
I
01 c
2 a a U c 2
U U
U
I
I
a a. c U C
U
2
c * U 2 U c:
c
: a
C
a a 4 - n
1
4 c U
c
4 I
.- !':
! E . J . - : - )BY .1
\
Pa D U J C /I
J - ) U
.U t - : C :a ) U . a
e f l fl
f Y -
1
I: : C : C
b 4 1 R bC bC * a i U e .
b . e l . * I
t
9 . cl
r 3 a a
f
: c Y I
U
E C
c
P .7 C C
2 I4 I
C Z I ,
4 -
! 4 Da
ac JC
3 - u n > C a c E 2 3 U .L
, I X
0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
Z Z Z L Z v ) m v ) v ) v ) ~ ~ n - n
11
I I I I I I I I I I I I I 1 I I
i
;
I
I '
I
I 1
I I
I I (
J J
12
4 h 0 0
z v) I
I m I I I I I I I I I I I 4 I I I I I
LI - 4 4
v
E
II
c 4
I
n m
P
N 0 0 0
z VI
I- i ! i
- .l I . 3 P 3 a
4 P 3 3 L v) L
STOCX
I n.o

![Damage modeling using higher-order finite element … modeling using higher-order finite element formulation ... plasticity context [5] or in ... the positive definiteness of tangent](https://img.pdfslide.net/doc/110x75/5afd39257f8b9aa34d8d26ac/damage-modeling-using-higher-order-finite-element-modeling-using-higher-order.jpg)