Adv. Hardware
The Shift Register
The Shift Register
TheShift Registeris another type of sequential logic circuit
that is used for the storage or transfer of data in the form of
binary numbers and then "shifts" the data out once every clock
cycle, hence the name "shift register". It basically consists of
several single bit "D-Type Data Latches", one for each bit (0 or 1)
connected together in a serial or daisy-chain arrangement so that
the output from one data latch becomes the input of the next latch
and so on. The data bits may be fed in or out of the register
serially, i.e. one after the other from either the left or the
right direction, or in parallel, i.e. all together. The number of
individual data latches required to make up a singleShift
Registeris determined by the number of bits to be stored with the
most common being 8-bits wide, i.e. eight individual data
latches.
The Shift Register is used for data storage or data movement and
are used in calculators or computers to store data such as two
binary numbers before they are added together, or to convert the
data from either a serial to parallel or parallel to serial format.
The individual data latches that make up a single shift register
are all driven by a common clock (Clk) signal making them
synchronous devices. Shift register IC's are generally provided
with aclearorresetconnection so that they can be "SET" or "RESET"
as required.
Generally, shift registers operate in one of four different
modes with the basic movement of data through a shift register
being:
Serial-in to Parallel-out (SIPO)- the register is loaded with
serial data, one bit at a time, with the stored data being
available in parallel form.
Serial-in to Serial-out (SISO)- the data is shifted serially
"IN" and "OUT" of the register, one bit at a time in either a left
or right direction under clock control.
Parallel-in to Serial-out (PISO)- the parallel data is loaded
into the register simultaneously and is shifted out of the register
serially one bit at a time under clock control.
Parallel-in to Parallel-out (PIPO)- the parallel data is loaded
simultaneously into the register, and transferred together to their
respective outputs by the same clock pulse.
The effect of data movement from left to right through a shift
register can be presented graphically as:
Also, the directional movement of the data through a shift
register can be either to the left, (left shifting) to the right,
(right shifting) left-in but right-out, (rotation) or both left and
right shifting within the same register thereby making
itbidirectional. In this tutorial it is assumed that all the data
shifts to the right, (right shifting).
Serial-in to Parallel-out (SIPO)
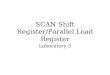
4-bit Serial-in to Parallel-out Shift Register
The operation is as follows. Lets assume that all the flip-flops
(FFAtoFFD) have just been RESET (CLEAR input) and that all the
outputsQAtoQDare at logic level "0" i.e, no parallel data output.
If a logic "1" is connected to theDATAinput pin ofFFAthen on the
first clock pulse the output ofFFAand therefore the resultingQAwill
be set HIGH to logic "1" with all the other outputs still remaining
LOW at logic "0". Assume now that theDATAinput pin ofFFAhas
returned LOW again to logic "0" giving us one data pulse or
0-1-0.
The second clock pulse will change the output ofFFAto logic "0"
and the output ofFFBandQBHIGH to logic "1" as its inputDhas the
logic "1" level on it fromQA. The logic "1" has now moved or been
"shifted" one place along the register to the right as it is now
atQA. When the third clock pulse arrives this logic "1" value moves
to the output ofFFC(QC) and so on until the arrival of the fifth
clock pulse which sets all the outputsQAtoQDback again to logic
level "0" because the input toFFAhas remained constant at logic
level "0".
The effect of each clock pulse is to shift the data contents of
each stage one place to the right, and this is shown in the
following table until the complete data value of0-0-0-1is stored in
the register. This data value can now be read directly from the
outputs ofQAtoQD. Then the data has been converted from a serial
data input signal to a parallel data output. The truth table and
following waveforms show the propagation of the logic "1" through
the register from left to right as follows.
Basic Movement of Data through a Shift Register
Clock Pulse NoQAQBQCQD
00000
11000
20100
30010
40001
50000
Note that after the fourth clock pulse has ended the 4-bits of
data (0-0-0-1) are stored in the register and will remain there
provided clocking of the register has stopped. In practice the
input data to the register may consist of various combinations of
logic "1" and "0". Commonly availableSIPOIC's include the standard
8-bit 74LS164 or the 74LS594.
Serial-in to Serial-out (SISO)
Thisshift registeris very similar to the SIPO above, except were
before the data was read directly in a parallel form from the
outputsQAtoQD, this time the data is allowed to flow straight
through the register and out of the other end. Since there is only
one output, theDATAleaves the shift register one bit at a time in a
serial pattern, hence the nameSerial-in to Serial-Out Shift
RegisterorSISO.
The SISO shift register is one of the simplest of the four
configurations as it has only three connections, the serial input
(SI) which determines what enters the left hand flip-flop, the
serial output (SO) which is taken from the output of the right hand
flip-flop and the sequencing clock signal (Clk). The logic circuit
diagram below shows a generalized serial-in serial-out shift
register.
4-bit Serial-in to Serial-out Shift Register
You may think what's the point of a SISO shift register if the
output data is exactly the same as the input data. Well this type
ofShift Registeralso acts as a temporary storage device or as a
time delay device for the data, with the amount of time delay being
controlled by the number of stages in the register, 4, 8, 16 etc or
by varying the application of the clock pulses. Commonly available
IC's include the 74HC595 8-bit Serial-in/Serial-out Shift Register
all with 3-state outputs.
Parallel-in to Serial-out (PISO)
The Parallel-in to Serial-out shift register acts in the
opposite way to the serial-in to parallel-out one above. The data
is loaded into the register in a parallel format i.e. all the data
bits enter their inputs simultaneously, to the parallel input
pinsPAtoPDof the register. The data is then read out sequentially
in the normal shift-right mode from the register atQrepresenting
the data present atPAtoPD. This data is outputted one bit at a time
on each clock cycle in a serial format. It is important to note
that with this system a clock pulse is not required to parallel
load the register as it is already present, but four clock pulses
are required to unload the data.
4-bit Parallel-in to Serial-out Shift Register
As this type of shift register converts parallel data, such as
an 8-bit data word into serial format, it can be used to multiplex
many different input lines into a single serial DATA stream which
can be sent directly to a computer or transmitted over a
communications line. Commonly available IC's include the 74HC166
8-bit Parallel-in/Serial-out Shift Registers.
Parallel-in to Parallel-out (PIPO)
The final mode of operation is the Parallel-in to Parallel-out
Shift Register. This type of register also acts as a temporary
storage device or as a time delay device similar to the SISO
configuration above. The data is presented in a parallel format to
the parallel input pinsPAtoPDand then transferred together directly
to their respective output pinsQAtoQAby the same clock pulse. Then
one clock pulse loads and unloads the register. This arrangement
for parallel loading and unloading is shown below.
4-bit Parallel-in to Parallel-out Shift Register
The PIPO shift register is the simplest of the four
configurations as it has only three connections, the parallel input
(PI) which determines what enters the flip-flop, the parallel
output (PO) and the sequencing clock signal (Clk).
Similar to the Serial-in to Serial-out shift register, this type
of register also acts as a temporary storage device or as a time
delay device, with the amount of time delay being varied by the
frequency of the clock pulses. Also, in this type of register there
are no interconnections between the individual flip-flops since no
serial shifting of the data is required.
Universal Shift Register
Today, high speed bi-directional "universal" typeShift
Registerssuch as the TTL 74LS194, 74LS195 or the CMOS 4035 are
available as a 4-bit multi-function devices that can be used in
either serial-to-serial, left shifting, right shifting,
serial-to-parallel, parallel-to-serial, and as a
parallel-to-parallel multifunction data register, hence the name
"Universal". These devices can perform any combination of parallel
and serial input to output operations but require additional inputs
to specify desired function and to pre-load and reset the
device.
4-bit Universal Shift Register 74LS194
Universal shift registers are very useful digital devices. They
can be configured to respond to operations that require some form
of temporary memory, delay information such as the SISO or PIPO
configuration modes or transfer data from one point to another in
either a serial or parallel format. Universal shift registers are
frequently used in arithmetic operations to shift data to the left
or right for multiplication or division.
Summary of Shift Registers
Then to summarise.
A simpleShift Registercan be made using only D-type flip-Flops,
one flip-Flop for each data bit.
The output from each flip-Flop is connected to theDinput of the
flip-flop at its right.
Shift registers hold the data in their memory which is moved or
"shifted" to their required positions on each clock pulse.
Each clock pulse shifts the contents of the register one bit
position to either the left or the right.
The data bits can be loaded one bit at a time in a series input
(SI) configuration or be loaded simultaneously in a parallel
configuration (PI).
Data may be removed from the register one bit at a time for a
series output (SO) or removed all at the same time from a parallel
output (PO).
One application of shift registers is converting between serial
and parallel data.
Shift registers are identified as SIPO, SISO, PISO, PIPO, and
universal shift registers.
In the next tutorial aboutSequential Logic Circuits, we will
look at what happens when the output of the last flip-flop in a
shift register is connected directly back to the input of the first
flip-flop producing a closed loop circuit that constantly
recirculates the data around the loop. This then produces another
type of sequential logic circuit called aRing Counterthat are used
as decade counters and dividers.
http://www.electronics-tutorials.ws/sequential/seq_5.htmlBand
Resistor Calculator
Calculate the resistance of a 4 band resistor
EEWebResistance Calculator
Choose Type
4 Band
5 Band
6 Band4 Band Resistor
1st Digit
2nd Digit
Multiplier
Tolerance
Black
00
Brown
1
1
x10
1%
Red
2
2
x100
2%
Orange
3
3
x1K
3%
Yellow
4
4
x10K
4%
Green
5
5
x100K
0.5%
Blue
6
6
x1M
0.25%
Violet
7
7
x10M
0.10%
Grey
8
8
x100M
0.05%
White
9
9
x1G
Gold
10
5%
Silver
100
10%
Outputs
Resistance:
5.60kohms
Tolerance:
5%
IntroductionA resistor is a perhaps the most common building
block used in circuits. Resistors come in many shapes and sizes
this tool is used to decode information for color banded axial lead
resistors.
4 Band DescriptionThe number of bands is important because the
decoding changes based upon the number of color bands. There are
three common types: 4 band, 5 band, and 6 band resistors. For the 4
band resistor:
Band 1 First significant digit.Band 2 Second significant
digitBand 3 MultiplierBand 4 Tolerance
Resistance ValueThe first 4 bands make up the resistance nominal
value. The first 2 bands make up the significant digits where:black
0brown 1red 2orange 3yellow 4green 5blue 6violet 7grey 8white 9The
3rd band or multiplier band is color coded as follows:black x1brown
x10red x100orange x1Kyellow x10Kgreen x100Kblue x1Mviolet x10Mgrey
x100Mwhite x1Ggold .1silver .01An example of a resistance value
is:
band 1 = orange = 3,band 2 = yellow = 4,band 3 = blue = 1M
value = 34*1M = 34 Mohm
Resistance ToleranceThe fourth band is the tolerance and
represents the worst case variation one might expect from the
nominal value. The color code for tolerance is as follows:brown
1%red 2%orange 3%yellow 4%green .5%blue .25%violet .1%gray .05%gold
5%silver 10%An example calculating the range of a resistor value
is:
If the nominal value was 345 Ohm and the 4th band of the
resistor was gold (5%) the value range would be nominal +/- 5% =
32.3 to 35.7
EEWebResistance Calculator
Choose Type
4 Band
5 Band
6 Band5 Band Resistor
1st Digit
2nd Digit
3rd Digit
Multiplier
Tolerance
Black
0
0
x1
Brown
1
1
1
x10
1%
Red
2
2
2
x100
2%
Orange
3
3
3
x1K
3%
Yellow
4
4
4
x10K
4%
Green
5
5
5
x100K
0.5%
Blue
6
6
6
x1M
0.25%
Violet
7
7
7
x10M
0.10%
Grey
8
8
8
x100M
0.05%
White
9
9
9
x1G
Gold
10
5%
Silver
100
10%
Outputs
Resistance:
56.00kohms
Tolerance:
5%
IntroductionA resistor is a perhaps the most common building
block used in circuits. Resistors come in many shapes and sizes
this tool is used to decode information for color banded axial lead
resistors.
5 Band DescriptionThe number of bands is important because the
decoding changes based upon the number of color bands. There are
three common types: 4 band, 5 band, and 6 band resistors. For the 5
band resistor:
Band 1 First significant digit.Band 2 Second significant
digitBand 3 Third significant digitBand 4 MultiplierBand 5
Tolerance
Resistance ValueThe first 4 bands make up the resistance nominal
value. The first 3 bands make up the significant digits where:black
0brown 1red 2orange 3yellow 4green 5blue 6violet 7grey 8white 9The
4th band or multiplier band is color coded as follows:black x1brown
x10red x100orange x1Kyellow x10Kgreen x100Kblue x1Mviolet x10Mgrey
x100Mwhite x1Ggold .1silver .01An example of a resistance value
is:
band 1 = orange = 3,band 2 = yellow = 4,band 3 = green = 5,band
4 = blue = 1M
value = 345*1M = 345 Mohm
Resistance ToleranceThe fifth band is the tolerance and
represents the worst case variation one might expect from the
nominal value. The color code for tolerance is as follows:brown
1%red 2%orange 3%yellow 4%green .5%blue .25%violet .1%gray .05%gold
5%silver 10%An example calculating the range of a resistor value
is:
If the nominal value was 345 Ohm and the 5th band of the
resistor was gold (5%) the value range would be nominal +/- 5% =
327.75 to 362.25
Band Resistor Calculator
Calculate the resistance of a 6 band resistor
EEWebResistance Calculator
Choose Type
4 Band
5 Band
6 Band6 Band Resistor
1st Digit
2nd Digit
3rd Digit
Multiplier
Tolerance
Tempco
Black
0
0
x1
Brown
1
1
1
x10
1%
100
Red
2
2
2
x100
2%
50
Orange
3
3
3
x1K
3%
15
Yellow
4
4
4
x10K
4%
25
Green
5
5
5
x100K
0.5%
Blue
6
6
6
x1M
0.25%
10
Violet
7
7
7
x10M
0.10%
5
Grey
8
8
8
x100M
0.05%
White
9
9
9
x1G
Gold
10
5%
Silver
100
10%
Outputs
Resistance:
56.00kohms
Tolerance:
5%
Tempco:
25ppm/C
IntroductionA resistor is a perhaps the most common building
block used in circuits. Resistors come in many shapes and sizes
this tool is used to decode information for color banded axial lead
resistors.
6 Band DescriptionThe number of bands is important because the
decoding changes based upon the number of color bands. There are
three common types: 4 band, 5 band, and 6 band resistors. For the 6
band resistor:
Band 1 first significant digit.Band 2 second significant
digitBand 3 third significant digitBand 4 MultiplierBand 5
ToleranceBand 6 Temperature Coefficient (Tempco)
Resistance ValueThe first 4 bands make up the resistance nominal
value. The first 3 bands make up the significant digits where:black
0brown 1red 2orange 3yellow 4green 5blue 6violet 7grey 8white 9The
multiplier band is color coded as follows:black x1brown x10red
x100orange x1Kyellow x10Kgreen x100Kblue x1Mviolet x10Mgrey
x100Mwhite x1Ggold .1silver .01An example of a resistance value
is:
band 1 = orange = 3,band 2 = yellow = 4,band 3 = green = 5,band
4 = blue = 1M
value = 345*1M = 345 Mohm
Resistance ToleranceThe fifth band is the tolerance and
represents the worst case variation one might expect from the
nominal value. The color code for tolerance is as follows:brown
1%red 2%orange 3%yellow 4%green .5%blue .25%violet .1%gray .05%gold
5%silver 10%An example calculating the range of a resistor value
is:
If the nominal value was 345 Ohm and the 5th band of the
resistor was gold (5%) the value range would be nominal +/- 5% =
327.75 to 362.25
Resistance Temperature CoefficientResistors values can change
with temperature. The 6th band represents the temperature
coefficient or tempco and is represents the amount the resistance
value will change with temperature. It is in units of ppm/degree C.
The band colors represents the following:
brown 100 ppm/degreeCred 50 ppm/degreeCorange 15
ppm/degreeCyellow 25 ppm/degreeCblue 10 ppm/degreeCviolet 5
ppm/degreeCAn example if a resistor had a nominal value of 1K ohm
and a tempco of 100 ppm/degreeC and we wanted to know how much a
resitor would change of 25degreeC.
100*25/1e6*1K= 2.5 ohm variation over 25degreeC.
What are a Half Adder and a Full Adder
(http://www.trivology.com/articles/518/what-are-a-half-adder-and-a-full-adder.html)Half
Adder is a digital combinational circuit that is used for the
addition of two bits and provides an output in the form of a sum
bit and a carry bit. The logical functional equations that relate
the outputs S and C of a half adder circuit to the input bits are
given below:-
Sum(S) = A ex-OR B Carry(C) = A.B
Logic Symbol
SchematicThus a half adder circuit can easily be synthesized by
using 1 ex-OR gate and 1 AND gate. Since a half adder circuit can
only be used to add two bits, it becomes obsolete in case of
multi-bit addition in practical applications.
A Full adder circuit is the one that is used for addition of
three bits. It is more complex than a half adder circuit. Let A,B
and C be the input bits of a full adder and S and C be the output
bits, then the logical equations that relates the outputs to the
inputs are:-S= A (ex-OR) B (ex-OR) C C= AB + C (A+B)
Logic Symbol
SchematicThus two ex-OR gates, two AND gates and two OR gates
can be used for the hardware synthesis of the circuit. These full
adder circuits are the ones that can be used for multi bit addition
of numbers.
In addition of multiple bits, the carry output from a full adder
being used for the addition of bits at ones place isfedas an input
bit to the full adder being used for the addition of the bits at
the next significant place and so on. The sum bits from all the
full adders along with the carry bit from the full adder dealing
with the most significant bits is available to the user as an
output. The carry input to the full adder dealing with the least
significant place should be made 0 by the user.
In market, only 4 bit full adders and 8 bit full adders are
available in IC form and they need to be combined for addition of
higher number of bits such as 16 and 32. The biggest disadvantage
of a multi-bit full adder is the large propagation delay that is
encountered in the transmission of carry bits from one adder block
to the other. That is the reason why these have been replaced by
more sophisticated designs such a look ahead carry adder in
practical computational systems.Half Adder and Full Adder
Circuit
Half Adder and Full Adder circuits is explained with their truth
tables in this article. Design of Full Adder using Half Adder
circuit is also shown.Single-bit Full Adder circuit and Multi-bit
addition using Full Adder is also shown.Half AdderWith the help of
half adder, we can design circuits that are capable of performing
simple addition with the help of logic gates.
Let us first take a look at the addition of single bits.
0+0 = 0
0+1 = 1
1+0 = 1
1+1 = 10
These are the least possible single-bit combinations. But the
result for 1+1 is 10. Though this problem can be solved with the
help of an EXOR Gate, if you do care about the output, the sum
result must be re-written as a 2-bit output.
Thus the above equations can be written as
0+0 = 00
0+1 = 01
1+0 = 01
1+1 = 10
Here the output 1of 10 becomes the carry-out. The result is
shown in a truth-table below. SUM is the normal output and CARRY is
the carry-out.
INPUTS OUTPUTSA B SUM CARRY0 0 0 0
0 1 1 0
1 0 1 01 1 0 1
From the equation it is clear that this 1-bit adder can be
easily implemented with the help of EXOR Gate for the output SUM
and an AND Gate for the carry. Take a look at the implementation
below.
Half Adder Circuit
For complex addition, there may be cases when you have to add
two 8-bit bytes together. This can be done only with the help of
full-adder logic.
Full AdderThis type of adder is a little more difficult to
implement than a half-adder. The main difference between a
half-adder and a full-adder is that the full-adder has three inputs
and two outputs. The first two inputs are A and B and the third
input is an input carry designated as CIN. When a full adder logic
is designed we will be able to string eight of them together to
create a byte-wide adder and cascade the carry bit from one adder
to the next.
The output carry is designated as COUT and the normal output is
designated as S. Take a look at the truth-table.
INPUTS OUTPUTSA B CIN COUT S0 0 0 0 0
0 0 1 0 1
0 1 0 0 1
0 1 1 1 0
1 0 0 0 1
1 0 1 1 0
1 1 0 1 0
1 1 1 1 1
From the above truth-table, the full adder logic can be
implemented. We can see that the output S is an EXOR between the
input A and the half-adder SUM output with B and CIN inputs. We
must also note that the COUT will only be true if any of the two
inputs out of the three are HIGH.
Thus, we can implement a full adder circuit with the help of two
half adder circuits. The first will half adder will be used to add
A and B to produce a partial Sum. The second half adder logic can
be used to add CIN to the Sum produced by the first half adder to
get the final S output. If any of the half adder logic produces a
carry, there will be an output carry. Thus, COUT will be an OR
function of the half-adder Carry outputs. Take a look at the
implementation of the full adder circuit shown below.
Full Adder Circuit
Though the implementation of larger logic diagrams is possible
with the above full adder logic a simpler symbol is mostly used to
represent the operation. Given below is a simpler schematic
representation of a one-bit full adder.
Single-bit Full Adder
With this type of symbol, we can add two bits together taking a
carry from the next lower order of magnitude, and sending a carry
to the next higher order of magnitude. In a computer, for a
multi-bit operation, each bit must be represented by a full adder
and must be added simultaneously. Thus, to add two 8-bit numbers,
you will need 8 full adders which can be formed by cascading two of
the 4-bit blocks. The addition of two 4-bit numbers is shown
below.
Multi-Bit Addition using Full Adder
(http://www.circuitstoday.com/half-adder-and-full-adder)
Flip Flops
hareBasic Flip Flops
This article deals with the basic flip flop circuits like S-R
Flip Flop, J-K Flip Flop, D Flip Flop, and T Flip Flop along with
truth tables and their corresponding circuit symbols.Before going
to the topic it is important that you get knowledge of its basics.
Click on the links below for more information.
Flip flops are actually an application of logic gates. With the
help of Boolean logic you can create memory with them. Flip flops
can also be considered as the most basic idea of a Random Access
Memory [RAM]. When a certain input value is given to them, they
will be remembered and executed, if the logic gates are designed
correctly. A higher application of flip flops is helpful in
designing better electronic circuits.
The most commonly used application of flip flops is in the
implementation of a feedback circuit. As a memory relies on the
feedback concept, flip flops can be used to design it.
There are mainly four types of flip flops that are used in
electronic circuits. They are
1. The basic Flip Flop or S-R Flip Flop2. Delay Flip Flop [D
Flip Flop]3. J-K Flip Flop4. T Flip Flop1. S-R Flip FlopThe
SET-RESET flip flop is designed with the help of two NOR gates and
also two NAND gates. These flip flops are also called S-R
Latch.
S-R Flip Flop using NOR GateThe design of such a flip flop
includes two inputs, called the SET [S] and RESET [R]. There are
also two outputs, Q and Q. The diagram and truth table is shown
below.
S-R Flip Flop using NOR Gate
From the diagram it is evident that the flip flop has mainly
four states. They are
S=1, R=0Q=1, Q=0This state is also called the SET state.
S=0, R=1Q=0, Q=1This state is known as the RESET state.
In both the states you can see that the outputs are just
compliments of each other and that the value of Q follows the value
of S.
S=0, R=0Q & Q = RememberIf both the values of S and R are
switched to 0, then the circuit remembers the value of S and R in
their previous state.
S=1, R=1Q=0, Q=0 [Invalid]This is an invalid state because the
values of both Q and Q are 0. They are supposed to be compliments
of each other. Normally, this state must be avoided.
S-R Flip Flop using NAND GateThe circuit of the S-R flip flop
using NAND Gate and its truth table is shown below.
S-R Flip Flop using NAND Gate
Like the NOR Gate S-R flip flop, this one also has four states.
They are
S=1, R=0Q=0, Q=1This state is also called the SET state.
S=0, R=1Q=1, Q=0This state is known as the RESET state.
In both the states you can see that the outputs are just
compliments of each other and that the value of Q follows the
compliment value of S.
S=0, R=0Q=1, & Q =1 [Invalid]If both the values of S and R
are switched to 0 it is an invalid state because the values of both
Q and Q are 1. They are supposed to be compliments of each other.
Normally, this state must be avoided.
S=1, R=1Q & Q= RememberIf both the values of S and R are
switched to 1, then the circuit remembers the value of S and R in
their previous state.
Clocked S-R Flip FlopIt is also called a Gated S-R flip
flop.
The problems with S-R flip flops using NOR and NAND gate is the
invalid state. This problem can be overcome by using a bistable SR
flip-flop that can change outputs when certain invalid states are
met, regardless of the condition of either the Set or the Reset
inputs. For this, a clocked S-R flip flop is designed by adding two
AND gates to a basic NOR Gate flip flop. The circuit diagram and
truth table is shown below.
Clocked S-R Flip Flop
A clock pulse [CP] is given to the inputs of the AND Gate. When
the value of the clock pulse is 0, the outputs of both the AND
Gates remain 0. As soon as a pulse is given the value of CP turns
1. This makes the values at S and R to pass through the NOR Gate
flip flop. But when the values of both S and R values turn 1, the
HIGH value of CP causes both of them to turn to 0 for a short
moment. As soon as the pulse is removed, the flip flop state
becomes intermediate. Thus either of the two states may be caused,
and it depends on whether the set or reset input of the flip-flop
remains a 1 longer than the transition to 0 at the end of the
pulse. Thus the invalid states can be eliminated.
2. D Flip FlopThe circuit diagram and truth table is given
below.
D Flip Flop
D flip flop is actually a slight modification of the above
explained clocked SR flip-flop. From the figure you can see that
the D input is connected to the S input and the complement of the D
input is connected to the R input. The D input is passed on to the
flip flop when the value of CP is 1. When CP is HIGH, the flip flop
moves to the SET state. If it is 0, the flip flop switches to the
CLEAR state.
To know more about the triggering of flip flop click on the link
below.
TAKE A LOOK :TRIGGERING OF FLIP FLOPSTAKE A LOOK :MASTER-SLAVE
FLIP FLOP CIRCUIT3. J-K Flip FlopThe circuit diagram and
truth-table of a J-K flip flop is shown below.
J-K Flip Flop
A J-K flip flop can also be defined as a modification of the S-R
flip flop. The only difference is that the intermediate state is
more refined and precise than that of a S-R flip flop.
The behavior of inputs J and K is same as the S and R inputs of
the S-R flip flop. The letter J stands for SET and the letter K
stands for CLEAR.
When both the inputs J and K have a HIGH state, the flip-flop
switch to the complement state. So, for a value of Q = 1, it
switches to Q=0 and for a value of Q = 0, it switches to Q=1.
The circuit includes two 3-input AND gates. The output Q of the
flip flop is returned back as a feedback to the input of the AND
along with other inputs like K and clock pulse [CP]. So, if the
value of CP is 1, the flip flop gets a CLEAR signal and with the
condition that the value of Q was earlier 1. Similarly output Q of
the flip flop is given as a feedback to the input of the AND along
with other inputs like J and clock pulse [CP]. So the output
becomes SET when the value of CP is 1 only if the value of Q was
earlier 1.
The output may be repeated in transitions once they have been
complimented for J=K=1 because of the feedback connection in the JK
flip-flop. This can be avoided by setting a time duration lesser
than the propagation delay through the flip-flop. The restriction
on the pulse width can be eliminated with a master-slave or
edge-triggered construction.
4. T Flip FlopThis is a much simpler version of the J-K flip
flop. Both the J and K inputs are connected together and thus are
also called a single input J-K flip flop. When clock pulse is given
to the flip flop, the output begins to toggle. Here also the
restriction on the pulse width can be eliminated with a
master-slave or edge-triggered construction. Take a look at the
circuit and truth table below.
T Flip Flop
(http://www.circuitstoday.com/flip-flops)
Transformer
JOHNDECEMBER - 23 - 2011
8 COMMENTS6ShareMost of the electronic circuits used in
Circuitstoday.com have different applications of the transformer.
Therefore, it is important to know the working principle,
construction and types of transformers used in different analog
circuits.
Transformer Working PrincipleA transformer can be defined as a
static device which helps in the transformation of electric power
in one circuit to electric power of the same frequency in another
circuit. The voltage can be raised or lowered in a circuit, but
with a proportional increase or decrease in the current
ratings.
The main principle of operation of a transformer is mutual
inductance between two circuits which is linked by a common
magnetic flux. A basic transformer consists of two coils that are
electrically separate and inductive, but are magnetically linked
through a path of reluctance. The working principle of the
transformer can be understood from the figure below.
Transformer Working
As shown above the transformer has primary and secondary
windings. The core laminations are joined in the form of strips in
between the strips you can see that there are some narrow gaps
right through the cross-section of the core. These staggered joints
are said to be imbricated. Both the coils have high mutual
inductance. A mutual electro-motive force is induced in the
transformer from the alternating flux that is set up in the
laminated core, due to the coil that is connected to a source of
alternating voltage. Most of the alternating flux developed by this
coil is linked with the other coil and thus produces the mutual
induced electro-motive force. The so produced electro-motive force
can be explained with the help of Faradays laws of Electromagnetic
Induction as
e=M*dI/dt
If the second coil circuit is closed, a current flows in it and
thus electrical energy is transferred magnetically from the first
to the second coil.
The alternating current supply is given to the first coil and
hence it can be called as the primary winding. The energy is drawn
out from the second coil and thus can be called as the secondary
winding.
In short, a transformer carries the operations shown below:
1. Transfer of electric power from one circuit to another.
2. Transfer of electric power without any change in
frequency.
3. Transfer with the principle of electromagnetic induction.
4. The two electrical circuits are linked by mutual
induction.
Transformer ConstructionFor the simple construction of a
transformer, you must need two coils having mutual inductance and a
laminated steel core. The two coils are insulated from each other
and from the steel core. The device will also need some suitable
container for the assembled core and windings, a medium with which
the core and its windings from its container can be insulated.
In order to insulate and to bring out the terminals of the
winding from the tank, apt bushings that are made from either
porcelain or capacitor type must be used.
In all transformers that are used commercially, the core is made
out of transformer sheet steel laminations assembled to provide a
continuous magnetic path with minimum of air-gap included. The
steel should have high permeability and low hysteresis loss. For
this to happen, the steel should be made of high silicon content
and must also be heat treated. By effectively laminating the core,
the eddy-current losses can be reduced. The lamination can be done
with the help of a light coat of core plate varnish or lay an oxide
layer on the surface. For a frequency of 50 Hertz, the thickness of
the lamination varies from 0.35mm to 0.5mm for a frequency of 25
Hertz.
Types of TransformersThe types of transformers differ in the
manner in which the primary and secondary coils are provided around
the laminated steel core. According to the design, transformers can
be classified into two:
1.Core- Type TransformerIn core-type transformer, the windings
are given to a considerable part of the core. The coils used for
this transformer are form-wound and are of cylindrical type. Such a
type of transformer can be applicable for small sized and large
sized transformers. In the small sized type, the core will be
rectangular in shape and the coils used are cylindrical. The figure
below shows the large sized type. You can see that the round or
cylindrical coils are wound in such a way as to fit over a
cruciform core section. In the case of circular cylindrical coils,
they have a fair advantage of having good mechanical strength. The
cylindrical coils will have different layers and each layer will be
insulated from the other with the help of materials like paper,
cloth, micarta board and so on. The general arrangement of the
core-type transformer with respect to the core is shown below. Both
low-voltage (LV) and high voltage (HV) windings are shown.
Core Type Transformer Cruciform Section
Core Type Transformers
The low voltage windings are placed nearer to the core as it is
the easiest to insulate. The effective core area of the transformer
can be reduced with the use of laminations and insulation.
2.Shell-Type TransformerIn shell-type transformers the core
surrounds a considerable portion of the windings. The comparison is
shown in the figure below.
Core Type and Shell Type Transformer Winding
The coils are form-wound but are multi layer disc type usually
wound in the form of pancakes. Paper is used to insulate the
different layers of the multi-layer discs. The whole winding
consists of discs stacked with insulation spaces between the coils.
These insulation spaces form the horizontal cooling and insulating
ducts. Such a transformer may have the shape of a simple rectangle
or may also have a distributed form. Both designs are shown in the
figure below:
Shell Type Transformers Rectangular Form
Shell Type Transformers Distributed Form
A strong rigid mechanical bracing must be given to the cores and
coils of the transformers. This will help in minimizing the
movement of the device and also prevents the device from getting
any insulation damage. A transformer with good bracing will not
produce any humming noise during its working and will also reduce
vibration.
A special housing platform must be provided for transformers.
Usually, the device is placed in tightly-fitted sheet-metal tanks
filled with special insulating oil. This oil is needed to circulate
through the device and cool the coils. It is also responsible for
providing the additional insulation for the device when it is left
in the air.
There may be cases when the smooth tank surface will not be able
to provide the needed cooling area. In such cases, the sides of the
tank are corrugated or assembled with radiators on the sides of the
device. The oil used for cooling purpose must be absolutely free
from alkalis, sulphur and most importantly moisture. Even a small
amount of moistures in the oil will cause a significant change in
the insulating property of the device, as it lessens the dielectric
strength of the oil to a great extent. Mathematically speaking, the
presence of about 8 parts of water in 1 million reduces the
insulating quality of the oil to a value that is not considered
standard for use. Thus, the tanks are protected by sealing them
air-tight in smaller units. When large transformers are used, the
air tight method is practically difficult to implement. In such
cases, chambers are provided for the oil to expand and contract as
its temperature increases and decreases. These breathers form a
barrier and resists the atmospheric moisture from contact with oil.
Special care must also be taken to avoid sledging. Sledging occurs
when oil decomposes due to over exposure to oxygen during heating.
It results in the formation of large deposits of dark and heavy
matter that clogs the cooling ducts in the transformer.
The quality, durability and handling of these insulating
materials decide the life of the transformer. All the transformer
leads are brought out of their cases through suitable bushings.
There are many designs of these, their size and construction
depending on the voltage of the leads. Porcelain bushings may be
used to insulate the leads, for transformers that are used in
moderate voltages. Oil-filled or capacitive-type bushings are used
for high voltage transformers.
The selection between the core and shell type is made by
comparing the cost because similar characteristics can be obtained
from both types. Most manufacturers prefer to use shell-type
transformers for high-voltage applications or for multi-winding
design. When compared to a core type, the shell type has a longer
mean length of coil turn. Other parameters that are compared for
the selection of transformer type are voltage rating, kilo-volt
ampere rating, weight, insulation stress, heat distribution and so
on.
Transformers can also be classified according to the type of
cooling employed. The different types according to these
classifications are:
1.Oil Filled Self-Cooled TypeOil filled self cooled type uses
small and medium-sized distribution transformers. The assembled
windings and core of such transformers are mounted in a welded,
oil-tight steel tanks provided with a steel cover. The tank is
filled with purified, high quality insulating oil as soon as the
core is put back at its proper place. The oil helps in transferring
the heat from the core and the windings to the case from where it
is radiated out to the surroundings. For smaller sized transformers
the tanks are usually smooth surfaced, but for large size
transformers a greater heat radiation area is needed, and that too
without disturbing the cubical capacity of the tank. This is
achieved by frequently corrugating the cases. Still larger sizes
are provided with radiation or pipes.
2.Oil Filled Water Cooled TypeThis type is used for much more
economic construction of large transformers, as the above told self
cooled method is very expensive. The same method is used here as
well- the windings and the core are immersed in the oil. The only
difference is that a cooling coil is mounted near the surface of
the oil, through which cold water keeps circulating. This water
carries the heat from the device. This design is usually
implemented on transformers that are used in high voltage
transmission lines. The biggest advantage of such a design is that
such transformers do not require housing other than their own. This
reduces the costs by a huge amount. Another advantage is that the
maintenance and inspection of this type is only needed once or
twice in a year.
3.Air Blast TypeThis type is used for transformers that use
voltages below 25,000 volts. The transformer is housed in a thin
sheet metal box open at both ends through which air is blown from
the bottom to the top.
E.M.F Equation of a Transformer
Transformer EMF Equation
Let,
NA=Number of turns in primary
NB= Number of turns in secondary
max= Maximum flux in the core in webers = BmaxX A
f = Frequency of alternating current input in hertz (HZ)
As shown in figure above, the core flux increases from its zero
value to maximum value max in one quarter of the cycle , that is in
frequency second.
Therefore, average rate of change of flux = max/ f = 4f
maxWb/s
Now, rate of change of flux per turn means induced electro
motive force in volts.
Therefore, average electro-motive force induced/turn = 4f
maxvolt
If flux varies sinusoidally, then r.m.s value of induced e.m.f
is obtained by multiplying the average value with form factor.
Form Factor = r.m.s. value/average value = 1.11
Therefore, r.m.s value of e.m.f/turn = 1.11 X 4f max= 4.44f
maxNow, r.m.s value of induced e.m.f in the whole of primary
winding
= (induced e.m.f./turn) X Number of primary turns
Therefore,
EA= 4.44f NAmax= 4.44fNABmA
Similarly, r.m.s value of induced e.m.f in secondary is
EB= 4.44f NBmax= 4.44fNBBmA
In an ideal transformer on no load,
VA= EAand VB= EB, where VBis the terminal voltage
Voltage Transformation Ratio (K)From the above equations we
get
EB/ EA= VB/ VA= NB/NA= K
This constant K is known as voltage transformation ratio.
(1) If NB>NA, that is K>1 , then transformer is called
step-up transformer.
(2) If NB