Embed Size (px)
DESCRIPTION
17 th FPSO Research Forum April 5 th 2006. The utilization of the pendulous motion for deploying subsea hardware in ultra-deep water. Francisco E. Roveri Petrobras R&D Rogério D. Machado Petrobras E&P Pedro F. K. Stock Petrobras E&P Maxwell B. de Cerqueira Petrobras E&P. - PowerPoint PPT Presentation
Citation preview

The utilization of the pendulous motion for deploying subsea hardware in ultra-deep water
The utilization of the pendulous motion for deploying subsea hardware in ultra-deep water
Francisco E. RoveriPetrobras R&D
Rogério D. MachadoPetrobras E&P
Pedro F. K. StockPetrobras E&P
Maxwell B. de CerqueiraPetrobras E&P
Francisco E. RoveriPetrobras R&D
Rogério D. MachadoPetrobras E&P
Pedro F. K. StockPetrobras E&P
Maxwell B. de CerqueiraPetrobras E&P
17th FPSO Research ForumApril 5th 2006

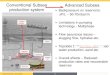
Smaller subsea hardware and shallow waters: crane barge, crane of SS, AHTS
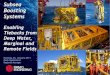
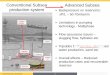
Previous installation of some subsea hardware by Petrobras
Previous installation of some subsea hardware by Petrobras

Crane barge and slings – 420 Te/620 m (1995)
Previous installation of some subsea hardware by Petrobras
Previous installation of some subsea hardware by Petrobras

MODU/drilling riser – 240 Te/940 m (2001)
Previous installation of some subsea hardware by Petrobras
Previous installation of some subsea hardware by Petrobras
Rotary table
Axial dynamics
Interface loads

Sheave Method – 175 Te/1900 m (2002)
Previous installation of some subsea hardware by Petrobras
Previous installation of some subsea hardware by Petrobras

The Pendulous MethodThe Pendulous Method
Disadvantage of wire rope: self weight + axial resonance (DAF)
Alternative: special construction vessels (scarce and high daily rates) installation costs prohibitive
Synthetic fiber rope issues to be solved: bending and heating + axial resonance (w/o heave compensation)
Challenge of deployment in increasing WD(250 Te payload, 2000-3000 m WD)
Challenge of deployment in increasing WD(250 Te payload, 2000-3000 m WD)

nat
a
nat w
1
em
ΜΜ
Κ
2πΤ
L
(EA)K equiv
K
M, Ma
K
C
prescribed vertical displacement (Xo)
)f(Lw
wdeployed
nat
frequency ratio β
0
1
2
3
0 1 2 3
w/wnat
DA
F
L = 0 ... Ltotal

Transportation vessel Overboarding
Hangoff Pendulous Motion
The Pendulous MethodThe Pendulous Method

Conceived to overcome the above constraints (DAF1)
Utilization of the Pendulous Motion
Utilization of two workboats
Distance between vessels 80% of cable length
Installation cable, from subsea hardware: wire rope with DBM, polyester and chain
Due to drag the pendulous motion will be very slow
The Pendulous Method (cont.)The Pendulous Method (cont.)

0
1
2
3
0.0 0.5 1.0 1.5 2.0 2.5 3.0
DAF (displacements)
Amplitude of dynamic force (KXo multiplier)
damping ratio ξ = 0.20
frequency ratio w/wn
working region

chainpolyesterwire rope
polyester
wire rope and DBM
slings
manifold
General system configuration (side view, just after release)
General system configuration (side view, just after release)

materialMBL (Te)
Diam. (mm)
length(m)
mass (kg/m)
wet wgt (kgf/m)
EA (MN)
chain R4 1097 105 30 222.7 193.8 840
polyester 1250 210 1600 29 7.40 300
wire rope 1000 127 60 57.8 44.7 965
Weight in air: 280 Te
Dimensions: 16.63 x 8.50 x 5.15 m (L x B X H)
CG 3.15 m above base line (CG≡CB)
System componentsSystem components

Equipment of complex topology
Volume of the envelope dimensions: 728 m3
Steel volume: 35.7 m3 (< 5% total volume)
Some assumptions are needed in order to simplify the computer model
1st aproach to concentrate drag and added mass at CG inadequate
improvement center of pressure and spatial distribution of drag and lift forces
Physics of the problemPhysics of the problem

G≡B G≡B
(1) Suspended at
transportation vessel side
(2) Just after release
G≡B
CL
CNCL
CN
(3) Clockwise rotation
G≡BCL
CN
CL
CN
(4) Anti-clockwise rotation
Physics of the problem (cont.)Physics of the problem (cont.)

PROCAP 3000 project• Participation in JIPs: VP2002 (Odim), DISH (phases
2&3)
Conceived in 2003, based on the procedure for installation of torpedo pile
Numerical analyses with Orcaflex to demonstrate the feasibility
Model tests at LabOceano (UFRJ) in 2004
1:1 scale prototype test in December 2005
Development of the conceptDevelopment of the concept

Three distinct phases:
• equipment at the side of transportation vessel
• pendulous motion
• equipment supported by installation vessel
Some results of numerical analysisSome results of numerical analysis

polyester
wire rope and DBM
chain
manifold
installation vessel
Configuration 10 minutes after releaseConfiguration 10 minutes after release

Cable effective tension, installation vessel side
Cable effective tension, installation vessel side
0
500
1000
1500
2000
2500
0 250 500 750 1000
time (s)
Eff
. te
nsio
n (k
N)

Manifold rotation (deg)Manifold rotation (deg)
0102030
0 400 800 1200
Time (s)
Rot
atio
n (d
eg)
1000_sec.avi 60_sec.avi

Model tests at 1:35, 1:70 and 1:130 scales for manifold #2 – excessive rotations detected in some cases
Model testsModel tests

Decision to build and install a 1:1 prototype for qualification of the method and installation procedure
1:1 Prototype test1:1 Prototype test

increase of sling forces at start
• additional buoyancy to the distributed buoyancy modules
improvement of hydrodynamic stability
• dead weight at the equipment bottom – lowers CG
• a more adequate equipment geometry, e.g., vertical or near vertical (slightly slanted) panels around it
Mitigation of excessive rotationsMitigation of excessive rotations

Construction of Roncador MSGLs #2 and #3 (1850 m WD) awarded to FMC
Pendulous Method to install MSGLs #2 and #3 Pendulous Method to install MSGLs #2 and #3

Utilization of conventional spread
Allow deployment of heavy equipment in ultra deep waters
Attenuation of axial force, prevents resonance
Cost effective compared to utilization of specialized installation vessels or rigs (about 30% cost reduction)
Needs improvement on control of rotations at start
ConclusionsConclusions