Embed Size (px)
Citation preview

MATH 210C NOTES: LIE THEORY
ARUN DEBRAYSEPTEMBER 23, 2015
These notes were taken in Stanford’s Math 210C class in Spring 2013, taught by Akshay Venkatesh. I live-TEXed them using vim,and as such there may be typos; please send questions, comments, complaints, and corrections to [email protected].
CONTENTS
1. Representations of GLd (C): 3/31/14 12. Representations of GLd (C), part II: 4/2/14 33. Lie Groups and Lie Algebras: 4/4/14 64. The Exponential Map: 4/7/14 85. The Baker-Campbell-Hausdorff Formula: 4/9/14 106. A Manifold-Theoretic Perspective: 4/11/14 127. Frobenius’ Theorem and Closed Subgroups: 4/14/14 158. Covering Groups: 4/16/14 169. Haar Measure: 4/18/14 1910. Applications to Representation Theory: 4/21/14 2111. The Peter-Weyl Theorem: 4/23/14 2312. Representations of SO2 and SU3: 4/25/14 2513. Representations of Lie Algebras: 4/28/14 2814. Maximal Tori and Weyl Groups: 4/30/14 3015. Conjugacy of Maximal Tori: 5/2/14 3216. Producing Enough Reflections: 5/5/14 3517. Mapping SU2 into Compact Lie Groups: 5/7/14 3718. Classical Compact Groups: 5/9/14 3919. Root Systems: 5/12/14 4120. Exceptional Root Systems: 5/14/14 4321. Chambers: 5/16/14 4522. Representations as Orbits of the Weyl Group: 5/19/14 4723. Spin Groups: 5/23/14 5024. The Weyl Integration Formula: 5/28/14 5225. Skew-Symmetry and the Weyl Integration Formula: 5/30/14 5426. Irreducible Representations: 6/2/14 5627. Irreducible Representations, part II: 6/4/14 59
1. REPRESENTATIONS OF GLd (C): 3/31/14
The course website is math.stanford.edu/~akshay/math210c.html. There will be homeworks about every 2weeks, along with a take-home midterm and final. The course will assume some background knowledge about thetopology of manifolds, integration of differential forms, and some familiarity with the representation theory of finitegroups.
We could just start with “let G be a compact Lie group,” but it’s nicer to have some motivation. Let V be afinite-dimensional complex vector space. Then, what other vector spaces W can we construct “algebraically” fromV ? For example, we have V ⊗V , Λ3V , and so on. Note that there are no compact groups in this statement; it’spurely algebra. However first we have to clarify exactly what is meant by algebraic. It’s in some sense a matter oftaste, as some people (but not in this class) consider the conjugate space to be algebraic, but here we want W to be
1

functorial in V , so that in particular there is a homomorphism ρ : GL(V )→GL(W ). But more precisely, this ρshould be an algebraic function in the following sense.
Definition 1.1. A representation ρ : GLd (C)→GLm(C) is algebraic if the component functions ρ(g )i j are eachalgebraic functions on GLd (C), i.e. polynomials in gi j and det(g )−1.
The latter term appears because we need to encode the information that det(g ) 6= 0.
Remark. The result below will still work if one uses holomorphic functions (and representations) instead of algebraicones. (
Theorem 1.2 (Weyl).(1) Every algebraic representation of GL(V ) is a direct sum of irreducible algebraic representations.(2) If d = dim(V ), then the irreducible representations of GL(V ) are parameterized by d -tuples of integers n1 ≤ n2 ≤· · · ≤ nd . The character of the irreducible representation corresponding to this d -tuple is
trace(g ∈GL(V )) =det�
xn j+ j+1i
�
det�
x j−1i
� ,
where x1, . . . , xd are the eigenvalues of g ∈GL(V ) acting on V .1
The proof of this theorem isn’t hard, but uses Lie groups in an important way, and will draw on materials fromthe first part of this class.
Example 1.3.(1) (nd , . . . , n1) = (1,0, . . . , 0) corresponds to GL(V ) acting on V itself. For d = 3, the character is
det
x31 x3
2 x33
x1 x2 x31 1 1
/det
x21 x2
2 x23
x1 x2 x31 1 1
= x1+ x2+ x3.
(2) (nd , . . . , n1) = (m, 0, . . . , 0), which intuitively says that the ratio of the two determinants is the sum of allmonomials of degree m. This ends up being a representation of GL(V ) on Symm V . In general, each tuplecomes from some functorial construction on vector spaces, but they are often non-obvious. This one will beon the first homework.
(3) (nd , . . . , n1) = (1, . . . , 1︸ ︷︷ ︸
`
, 0, . . . , 0) corresponds to a representation of GL(V ) on∧`V , i.e. the `th exterior
power.(4) (nd , . . . , n1) = (2,2,0, . . . , 0) is more exotic — but a better example of the typical structure of these representa-
tions. This is a representation of GL(V ) on
x ∈V ⊗4 |(1 3)x = (2 4)x =−x(1 2)(3 4)x = xx +(2 3 4)x +(2 4 3)x = 0
.
(Here, S4 acts on V ⊗4 by permuting the entries, e.g. (1 3)(x1⊗ x2⊗ x3⊗ x4) = x3⊗ x2⊗ x1⊗ x4.) These areexactly the symmetries of the Riemann curvature tensor of a Riemannian manifold! (
There’s no great reference for this; look anywhere people talk about functors from vector spaces to themselves.The proof of Theorem 1.2 will make several assumptions which will be justified later along in the course. Specifically,
we need that:• the representation theory of compact groups behaves exactly like that of finite groups (e.g. character orthogo-
nality, all of the elementary structural theorems), except replacing sums with integrals, and• an integration formula for the unitary group U(d ), to be given more precisely later.
Definition 1.4. The unitary group is U(d ) ⊂GLd (C), the set of g ∈GLd (C) preserving the standard Hermitianform
∑di=1|zi |
2, i.e. so that g g t = Id. This is a compact topological group, as the constraint forces individual entriesin these matrices to be bounded.
1This is a symmetric function in the xi .2

There’s no a priori reason to introduce the unitary group here, but it will be quite useful.
Claim. U(d ) is Zariski-dense in GLd (C): in other words, any algebraic function on GLd (C) that vanishes on U(d )vanishes everywhere.
Proof. This will be on the first homework; it’s not difficult, but involves showing said algebraic function has zeroderivative. For example, when d = 1, GL1(C)∼=C∗, and U(1) is the unit circle, so this boils down to the fact that aholomorphic function that vanishes on the unit circle vanishes everywhere.
This result allows one to promote lots of stuff from U(d ) to GLd (C). In particular, if W is an algebraic representa-tion of GLd (C) and W ′ ⊂W is preserved by U(d ), then W ′ is preserved by all of GLd (C) (which will be explainedin a moment).
Proof of Theorem 1.2, part (1). With these assumptions, we can now demonstrate the first part of the theorem: if Wis a representation of GLd (C), then split W =
⊕
Wi as U(d )-representations (since Maschke’s theorem holds forcompact groups), but then, each Wi is a GLd (C)-representation too, and is irreducible because it’s irreducible underthe smaller group U(d ).
Now we can go back and answer the statement given just before the proof: for W ′ ⊂W to be preserved by U(d )is to say that for all u ∈U(d ) and w1 ∈W ′, u ·w ∈W ′, or equivalently, ⟨uw1, w2⟩= 0 for all u ∈U(d ), w1 ∈W ′,and w2 ∈ (W ′)⊥. ⟨__ w1, w2⟩ is a holomorphic function on GLd (C) that vanishes on U(d ), and thus it vanisheseverywhere, so W ′ is GLd (C)-invariant. �
This proof used a general trick of encoding a statement that one want to generalize into a function that vanishessomewhere.
The second part of Theorem 1.2 is different; unlike for finite groups, it’s possible to compute the characters just bypure thought, using the orthogonality relations but not worrying about what the representations actually are. Forthis part, we’ll need the following facts.
• For any compact topological group, there’s a preferred measure (i.e. way to integrate functions). Moreprecisely, there’s a unique measure µ such that the total measure µ(G) = 1 and µ is left- and right G-invariant,i.e. µ(S) =µ(S g ) =µ(g S) for any g ∈G and measurable S ⊂G.
A measure with total mass 1 is a probability measure, so this says there’s a preferred way to talk about arandom element of a compact topological group.• The characters of a continuous representation of a topological group are orthonormal, i.e. if V1,V2, . . . are
the irreducible continuous representations of a compact topological group G, their characters χ1,χ2, . . . forman orthonormal basis of the (not necessarily finite-dimensional) Hilbert space of class functions
{ f ∈ L2(G,µ) : f (x g x−1) = f (g )}.
• We also need an integration formula. Let
T =
z1. . .
zn
: |zi |= 1
,
which is a closed subgroup of U(d ). Then, any element of U(d ) is conjugate to an element of T (which isjust a restatement of the fact that any unitary matrix can be diagonalized), so one ought to be able to telleverything about a class function from its restriction to T . Specifically, if f is a class function on U(d ), then
∫
U(d )f dµ=
1n!
∫
Tf · |[|
�
∏
i≤ j
zi − z j2dµT ,
where µ is the canonical measure discussed above for U(d ), and µT is that for T . This is a special case ofsomething we’ll see again, called the Weyl integration formula.
2. REPRESENTATIONS OF GLd (C), PART II: 4/2/14
Recall that we’ve already proven that every algebraic (or holomorphic) representation of GLd (C) is a sum ofirreducibles, and we’re trying to show that the representations are indexed by integers m1 ≤ · · · ≤ md with characters
3

det(xm j+ j−1i )/det(x j−1)
i , where x1, . . . , xd are the eigenvalues of g ∈GLd (C). This was in the context of determiningwhich vector spaces one can construct from a given one.
To prove part 2 of Theorem 1.2, we will show that the character formula holds for the unitary group U(d ) ⊆GLd (C), which is a compact subgroup, and then extend it to the whole of GLd (C). The important feature of U(d ) isthat it’s Zariski-dense, so an algebraic function on GLd (C) that vanishes on U(d )must vanish everywhere.
The proof will lean on the following facts, which were presented last lecture, and will be proven formally later inthe class.
• There’s a unique bi-invariant (i.e. left- and right-invariant) probability measure µ on a given compacttopological group, called the Haar measure. Later on in the course, we’ll be able to fairly easily given anexplicit formula for it.• The characters on U(d ) form an orthonormal basis for class functions in U(d ) (i.e. functions that are invariant
under conjugacy).• The Weyl integration formula: if f is a continuous class function on U(d ), then
∫
U(d )f dµ=
1d !
∫
Tf |D|2 dµT ,
where T (which stands for “torus”) is the diagonal subgroup of U(d ), and D is given by
D
x1. . .
xd
=∏
i< j
(xi − x j ),
and µT is the Haar measure for T (as T is also a compact topological group), given by µT =∏
dθi/2π.
This third fact is not intuitive, but means that if one chooses a random element of U(d ) (using the Haar measure as aprobability distribution), then its eigenvalues, given by e iθ1 , . . . , e iθd since the matrix is unitary, have a distributionfunction
1d !
∏
j<k
|e iθ j − e iθk |.
Qualitatively speaking, this means that it’s unlikely for eigenvalues to be close together. You can check this on acomputer, picking a matrix and calculating the minimum distance between any two of its eigenvalues, and this resultis true of other classes of matrices (e.g. symmetric matrices: those with repeated eigenvalues form a subspace ofcodimension greater than 1).
Proof of Theorem 1.2, part 2. Suppose V is a continuous irreducible representation of U(d ), and let χV : U(d )→C
be its character. Then, χV
x1. . .
xd
is given by a polynomial in x1, . . . , xn , x−1
1 , . . . , x−1n . Look at it as a T -
representation: since T is a compact abelian group, then the representation decomposes into a sum of irreducibles,and each irreducible has dimension 1 (since it’s abelian; this is just as in the finite case).
The one-dimensional, continuous representations of T are given by
x1. . .
xd
7−→ xk1
1 · · · xkd
d , k1, . . . , kd ∈Z.
This isn’t obvious, but isn’t too hard to check.Thus, χV on T is a sum of these monomials. In fact,
χV =∑
mkxk11 · · · x
kd
d , mk ∈Z≥0.4

Since χV is polynomial in x1, . . . , xd , call this polynomial P (x1, . . . , xd ). Now, we can use orthogonality of characters:
⟨χV ,χV ⟩=∫
U(d )|χV |
2 dµ
=1d !
∫
T|χVD|
2 dµT ,
and χVD(x1, . . . , xd ) = P (x1, . . . , xd )D(x1, . . . , xd ); D is anti-symmetric by its definition, and P is symmetric (becausethis comes from U(d )), so we can write
χVD
x1. . .
xd
=∑
m′kxk11 · · · x
kd
d ,
where the m′k ∈Z are anti-symmetric (and they’re integers because everything else here is).
From the orthogonality of characters or Fourier series theory, the monomials xk11 · · · x
kd
d form a basis for L2(T ),so, since V is irreducible, then
1= ⟨χV ,χV ⟩=1d !
∑
k
�
�m′k�
�
2.
Now, since m′k is anti-symmetric in k1, . . . , kd , then it’s only nonzero when the ki are all distinct. Thus, for eachm(k1,...,kd )
6= 0, any permutation ki 7→ kσ(i) fixes mk up to sign, and thus there’s a unique k1, . . . , kd up to permutationsuch that mk 6= 0, and thus mk =±1. Thus, we can rewrite the character as
χV =±∑
σ∈Sdx
kσ(1)1 · · · xkσ(d )
d sign(σ)∏
i< j (xi − x j ).
To determine the sign in the numerator, one can plug in x1 = 1, . . . , xd = 1, as χV (id)> 0.The denominator is exactly the Vandermonde determinant
∏
i< j
(xi − x j ) = det
1 . . . 1x1 . . . xd...
. . ....
xd−11 . . . xd−1
d
,
and the numerator is also a determinant (the cofactor expansion formula), specifically the matrix whose i j th entry isxki
j . After reordering, we can assume that k1 < k2 < · · ·< kd .2
So now we know that if V is an irreducible representation of U(d ), then χV = χm as described in the theoremstatement, for some m1 ≤ · · · ≤ md . We still need to show that every m occurs, and that these representations canbe extended to GLd (C). The proof is pretty amazing: Weyl used so little explicitly to actually compute all of thecharacters!
Suppose there exists an m0 such that χm0doesn’t occur as the character of an irreducible representation of
U(d ). Then, pick any irreducible representation V , and in a similar computation to above, one can show that¬
χm0,χV
¶
=¬
χm0,χm
¶
for some m 6=m0, and thus that it’s zero. Thus, χm0is orthogonal to the space spanned by
all of the irreducible characters. . . but they have to span the space of all class functions, so this is a contradiction.Now, all we have to prove is the following claim:
Claim. If V is an irreducible representation of U(d ), then it extends uniquely to GLd (C), i.e. the homomorphismU(d )→GL(V ) extends uniquely to an algebraic GLd (C)→GL(V ).
A better way to state this: restriction from GLd (C)→GL(V ) to U(d )→GL(V ) is an equivalence of categories!We saw that uniqueness follows because U(d ) is Zariski-dense in GLd (C), but for existence, we need to access
the representation somehow, not just its character. It’s enough to show that there’s a U(d )-representation V ′ ⊃Vthat extends to GLd (C), because last time, we showed that U(d )-invariance of a sub-GLd (C)-representation impliesGLd (C)-invariance, so this implies that V lifts.
2In the theorem statement, we used m1 = k1, m2 = k2− 1, m3 = k3− 2, and so on.5

Later in the course, we will explicitly write down representations of U(d ), but for now, we’ll use the following:
Definition 2.1. If G is a compact group, a translate of a character χ is a function g 7→ χ (h g ) for some h ∈G. Then,T (χ )⊆ L2(G) denotes the set of all translates of χ , and the inclusion is as finite-dimensional subspaces (which is aresult from character theory).
Lemma 2.2. Let G be a compact group, U an irreducible representation of G, and W a faithful representation of G.Then:
(1) U occurs inside W ⊗a ⊗fW ⊗b for some a and b (where fW is the dual representation).(2) One can realize U ⊆T (χU ).
To prove (1), the goal is to approximate the character of the regular representation, which does contain allirreducible representations but might not be finite-dimensional (since G can be infinite) with that of W ⊗a ⊗fW ⊗b .The argument can be done with finite groups and then generalized. For (2), check for finite groups, and the sameproof works here.
Armed with the above lemma, here are two ways to choose such a V ′:
(1) Using part (1), V occurs within some (Cd )⊗a ⊗ ((Cd )∗)⊗b , which GLd (C) acts on, extending U(d ).(2) Using part (2), V ⊆ T (χV ), but χV is a polynomial in the entries of the matrix and the inverse of the
determinant and is of some bounded degree. Here, the U(d )-action extends by considering translates onGLd (C) instead of U(d ) (i.e. the two spaces are isomorphic, so the action by left translation lifts). �
3. LIE GROUPS AND LIE ALGEBRAS: 4/4/14
Now, with the motivation out of the way, we can start the class properly.A Lie group is a group G with the structure of a smooth (i.e. C∞) manifold such that the group operations of
multiplication m : G×G→G and inversion G→G given by x 7→ x−1.3
By the end of the course, we’ll classify all compact Lie groups and their representations.
Example 3.1.(1) The basic example is GLn(R), the group of invertible n× n real matrices. This is clearly a manifold, because
it’s an open subset of Mn(R), and since matrix multiplication and inversion are polynomial functions in eachentry, then they’re smooth.
(2) Similarly, we have GLn(C). It has more structure as a complex manifold (and therefore a complex Lie group),because the group operations are complex analytic. This is beyond the scope of the class, though.
(3) The orthogonal group is the group of rotations in Rn , O(n) = {A∈GLn(R) |AAT= idn}. This is a smoothsubmanifold of GLn(R), because it’s the preimage of the regular value idn under the map A 7→ AAT fromMn(R) to the group of symmetric matrices.4
(4) We’ll see later in the class that if G is a Lie group and H ⊂ G is a closed subgroup, then H is a smoothsubmanifold and thus acquires a Lie group structure. This provides an alternate proof that O(n) is a Liegroup.
(5) The unitary group U(n) = {A∈GLn(C) |AAT= idn}. Again, this follows because this is the preimage of idn ,
which is a regular value, or because this is a closed subgroup of GLn(C).(6) In general, subgroups of GLn(R) are a good way to obtain Lie groups, such as the Heisenberg group
1 x y0 1 z0 0 1
⊆GL3(R),
which is diffeomorphic to R3, or similarly one could take the subgroup of upper triangular matrices
a x y0 b z0 0 c
⊆GL3(R).
3If one just required G to be a topological space and the maps to be continuous, then G would be a topological group.4A value is said to be regular for a map if the derivative has full rank at each point in the preimage. It’s a standard fact that the preimage of a
regular value is a smooth submanifold.6

(7) There are other Lie groups which don’t occur as closed subgroups of GLn(R) or GLn(C), but they’re not asimportant, and we’ll get to them later. (
Lie Algebra of a Lie Group. We want to extract an invariant by linearizing the group law near the identity. LetT be the tangent space to G at the identity e . Then, the multiplication map m is smooth, so its derivative is a mapdm : T(e ,e)(G×G)→ Te G, which can be thought of as T ⊕T → T .
Unfortunately, this derivative carries no information about the group G, because the derivative sends (x, 0) 7→ xand (0, y) 7→ y, so dm : (x, y)→ x + y. This is certainly a useful fact to know, but it’s not a helpful invariant. So wewant something which captures more information about G.
Let’s look at the map G×G→G given by f : (g , h) 7→ [g , h] = g h g−1h−1, their commutator. If G is abelian,this is the zero map (e.g. the Lie group Rn). But this time, f (e , h) = e , so d f(e ,e) : T ⊕T → T is now zero. In otherwords, elements near the identity commute to first order, because multiplication resembles addition to first order. Butthen, what’s the quadratic term of f ? The second derivatives give a quadratic function q : T ⊕T → T , in that everycoordinate is quadratic, and specifically a sum xi =
∑
a ij k x j xk . It’s still the case that q(0, x) = q(x, 0) = 0, which
implies it’s bilinear — but f (h, g ) = f (g , h)−1, so q is a skew-symmetric bilinear form. This provides informationabout how two elements near the identity fail to commute.
Example 3.2. When G =GLn(R) ⊆ Mn(R), it’s an open subgroup, so Te G ∼= Mn(R). Thus, this bilinear map isB : Mn ×Mn→Mn given by X ,Y 7→X Y −Y X . This will be the basic example of a Lie algebra.
To show the above claim and compute B , we need to compute commutators near e , so for X ,Y ∈GLn(R), wewant to understand [1+ εX , 1+ εY ] for small ε. But using the Taylor series for 1/(1+ x), we can compute
[1+ εX , 1+ εY ] = (1+ εX )(1+ εY )(1+ εX )−1(1+ εY )−1
= (1+ εX + εY + ε2X Y )(1+ εY + εX + ε2Y X )−1
= (1+ εX + εY + ε2X Y )(1− εY − εX − ε2Y X + ε2(X +Y )2+O(ε3))
= 1+ ε2(X Y −Y X − (X +Y )2+(X +Y )2)+O(ε3)
= 1+ ε2(X Y −Y X )+O(ε3).
One could state this more formally with derivatives, but this argument is easier to follow. (
Definition 3.3. For a Lie group G, the associated Lie algebra is g = (Te G,B), where B is the bilinear form givenabove (called q), usually denoted X ,Y 7→ [X ,Y ] and called the Lie bracket.
Thus, for GLn(R), Lie(GLn(R)) = {Mn(R), [X ,Y ] =X Y −Y X }. There’s also an abstract, axiomatic notion of aLie algebra, which we will provide later.
The notion of a Lie algebra for a Lie group seems extremely arbitrary, at least until we get to the following theorem.
Theorem 3.4 (Lie). g determines the Lie group G locally near the identity (since the invariant is taken near the identity),in the sense that if G and H are Lie groups and ϕ : Lie(G)→ Lie(H ) is an isomorphism that preserves the Lie bracket,then there exist open neighborhoods U ⊂H and V ⊂G of their respective identities and a diffeomorphism Φ : U →Vsuch that Φ(xy) = Φ(x)Φ(y) whenever both sides are defined, and dΦ|e = ϕ.
Note that it’s possible to have x, y ∈U such that Φ(xy) 6∈V , in which case we ignore them.This theorem states that if two Lie groups have isomorphic Lie algebras, then their group multiplication operations
are the same near the identity. In fact, there’s a result called the Campbell-Baker-Hausdorff formula: there existneighborhoods U ⊂ g of 0 and V ⊂G of e , a diffeomorphism Φ : U →V , and a power series F (X ,Y ) in X , Y , and[X ,Y ] given by
F (X ,Y ) =X +Y +[X ,Y ]
2+[X −Y, [X ,Y ]]
12+ · · ·
such that Φ(F (X ,Y )) = Φ(X )Φ(Y ) whenever both sides are defined.In other words, there exist local coordinates near the identity where multiplication can be written solely in terms
of the Lie bracket. Thus, this single invariant locally determines the group operation!
Remark. But without this hindsight, it’s completely non-obvious how to come up with the Lie bracket in the firstplace. However, it’s possible to obtain it by carefully thinking about the Taylor expansion of m : G×G→G. (Thisis actually true more generally when one considers invariants given by some structure on a manifold.)
7

Pick a basis e1, . . . , en for T = Te G, and pick a system of coordinates x1, . . . , xn giving a local system of coordinatesat the identity, i.e. an f = (x1, . . . , xn) : G→Rn sending e 7→ 0 and choose them to be “compatible with the ei ,” i.e.so that ∂ xi |e = ei .
This allows one to think of a neighborhood of e ∈G as a neighborhood of 0 ∈Rn , and to transfer multiplicationover. In particular, we can multiply things near 0, as
(a1, . . . ,an) · (b1, . . . , bn) = f ( f −1(a1, . . . ,an) · f 1(b1, . . . , bn)).
The first-order term must be addition, because as shown before, the derivative is addition, and the second-order termis some quadratic form Q : T ⊕T → T . In other words,
(a1, . . . ,an) · (b1, . . . , bn) = (a1+ b1, . . . ,an + bn)+Q(a1, . . . ,an , b1, . . . , bn)+ · · · .Quadratization, unlike linearization, depends on coordinates. . . but Q is actually bilinear, though not skew-symmetric.When one changes coordinates, one might have
xi ← xi +∑
ai j k x j xk .
Then, such a coordinate change sends Q 7→Q+S for a symmetric bilinear form S . Thus, the class of Q is well-definedin the quotient group of bilinear quadratic forms modulo symmetric bilinear forms; since every bilinear form can bedecomposed into symmetric and skew-symmetric components, then this is just the group of skew-symmetric bilinearforms T ×T → T .
This story works for other structures; for example, if one starts with the metric, the result is the Riemann curvaturetensor! (
4. THE EXPONENTIAL MAP: 4/7/14
Last time, we discussed Lie algebras: if G is a Lie group, then its tangent space T at the identity is equipped witha canonical bilinear map, the Lie bracket [, ] : T × T → T , given by the quadratic term of the commutator mapg , h 7→ g h g−1h−1 (since its derivative is zero).
If two Lie groups have the same Lie algebra (T , [, ]), then there’s a smooth local identification (i.e. of someneighborhoods of the respective identities) near the identity.5
There is a group-theoretic proof of this theorem (involving a canonical coordinate system) and a manifold-theoreticproof. First, we will sketch the group-theoretic proof.
Proposition 4.1. Let G be a Lie group and T = Te G. For every X ∈ T , there’s a unique smooth homomoprhismϕX :R→G such that ϕ′X (0) = X . Define exp(X ) = ϕX (1) giving exp : T →G; then, this map is smooth, exp(0) = 1,and its derivative at 0 is the identity.
This implies that exp gives a diffeomorphism from a neighborhood of 0 ∈ T to a neighborhood of e ∈G.
Example 4.2. For G =GLn(R), we can identify T =Mn(R). Then, ϕX (t ) = e tX for X ∈Mn(R).6 Thus, exp(X ) =eX . (
Remark. Note that if G ≤GLn(R) is a closed subgroup (which we will later show implies that it’s also a submanifold,giving it a Lie group structure), then ϕX (t ) = e tX because of the uniqueness criterion in Proposition 4.1, so exp(X ) =eX again. In particular, eX ∈G when X ∈ Te G. Thus, for all practical purposes, one can think of this exponentialmap as a matrix exponential. (
It’s also convenient that with a natural choice of metric (i.e. that inducing the Haar measure), this exponential willcoincide with the Riemannian exponential.
Proof sketch of Proposition 4.1. We want ϕX (t ) = ϕX (t/N )N , and if N is large, this is near the identity (so thatthe derivative is about 0). This is enough for a unique definition: if ϕ : R → G is such that ϕ′(0) = X , thenlimN→∞ϕ(t/N )N exists and is independent of ϕ, so this must be ϕX (t ), which will imply existence and uniqueness.
5There’s a cleaner statement of this, also known as Lie’s theorem, involving covering spaces, which we’ll cover later on in this course.6Here, the matrix exponential is defined via the usual power series or as
eX = limN→∞
�
1+XN
�N,
so that eAeB = eA+B . The second definition is useful because it makes the linear term easy to extract.8

It’s pretty intuitive, but the details are rather annoying to write out, which is why people don’t often prove Lie’stheorem in this way. First off, it’s easier to take limN→∞ϕ(t/2
N )2N, which will be the same.
Suppose ϕ1 and ϕ2 are such that ϕ′1(0) = ϕ′2(0) =X , and such that ϕ1(0) = ϕ2(0) = e . Write f (t ) = ϕ−1
2 ϕ1, so thatϕ1(t ) = ϕ2(t ) f (t ). Then, f ′(0) = 0 (since multiplication near e looks like addition), so if we look at the Taylor series,f (1/N ) is quadratically close to e (i.e. the distance is� 1/N 2, measured in some coordinates near the identity).
Then,
ϕ1
�
1M
�M=
M times︷ ︸︸ ︷
ϕ2
�
1M
�
f�
1M
�
ϕ2
�
1M
�
f�
1M
�
· · ·ϕ2
�
1M
�
f�
1M
�
= ϕ2
�
1M
�2�
ϕ−12
�
1M
�
f�
1M
�
ϕ2
�
1M
��
ϕ2
�
1M
�
f�
1M
�
· · ·ϕ2
�
1M
�
f�
1M
�
.
Applying this many times,
= ϕ2
�
1M
�Mϕ2
�
1M
�−(M−1)f�
1M
�
ϕ2
�
1M
�M−1ϕ2
�
1M
�−(M−2)f�
1M
�
ϕ2
�
1M
�M−2· · · f
�
1M
�
︸ ︷︷ ︸
(∗)
.
Then, the claim is that (∗) is small, i.e. that its distance to the identity is at most some constant over M . This is truebecause it’s a product of M terms, each of which is on the order of 1/M 2 distance form the identity. This argumentcan be made more precise by writing out Taylor’s theorem a lot, but this is messy. Thus,
ϕ1
�
1M
�M= ϕ2
�
1M
�Mh,
for a constant h depending on the coordinate chart such that dist(h, e) is less than a constant times 1/M . The actualderivation isn’t pretty, but it works, and only uses the group structure!
Now, apply this to ϕ2 = ϕ1(t/2)2, so that ϕ′2 = ϕ
′1, and with M = 2N . This implies that
ϕ1
� t2N
�2N= ϕ1
� t2N+1
�2N+1h,
where h has the same restrictions as before. Then, the sequence must converge, because it’s moving a distance of1/2N for each N . (Of course, there’s something to demonstrate here.) But the point is, the limit limN ϕ(t/2
N )2N
exists and is independent of ϕ, and at this point it’s easy to check that ϕ must be a homomorphism, though one alsomust show that exp is smooth in X . �
Next, we want to show that there’s a universal expression for the product in these exponential coordinate, i.e.
exp(X )exp(Y ) = exp(F (X ,Y )) = exp�
X +Y +[X ,Y ]
2+[X −Y, [X ,Y ]]
12+ · · ·
�
,
given by the Baker-Campbell-Hausdorff power series, completely independent of G. The terms are a mess: nobodyreally needs to write them down, and it’s much more important that such a formula exists. Then, there will be aneighborhood of 0 in T such that F converges and equality holds for X ,Y ∈ T . This induces the required isomorphismof Lie groups — it’s pretty fantastic that the single bilinear form (in a finite-dimensional space) completely classifieseverything!
Example 4.3. Once again consider G = GLn(R), to see that this is not trivial. Now, the statement means thateX eY = eZ for some Z . For M ∈GLn(R) near the identity, the logarithm is defined by its power series:
log(M ) =∞∑
i=1
(−1)i+1
i(M − 1)i ,
so that log(eX ) =X .9

Now one can compute log(eX eY ), which can be done by multiplying out the respective power series:
log(eX eY ) = log��
1+X +X 2
2!+ · · ·
��
1+Y +Y 2
2!+ · · ·
��
= log�
1+X +Y +X Y +X 2
2+
Y 2
2+ · · ·
�
=X +Y +X Y +X 2
2+
Y 2
2−(X +Y )2
2+ · · ·
=X +Y +X Y −Y X
2+ · · ·
There’s a lot of ugly terms here if one goes forward, but the content of the theorem is that everything can be expressedin terms of the Lie bracket, and no multiplication within the group. (
Dynkin gave a combinatorial formula for this, replacing each coefficient with the corresponding Lie brackets suchthat the overall sum is the same, e.g. Y Y X 7→ [Y, [Y,X ]]/3, where the denominator varies with each term.
So, why is all of this believable? The things one needs to fill in are estimating errors to ensure they don’t blowup. We can quantify this error, though there’s no reason to go into huge detail. We had exp(X ) = exp(X /N )Nfor some large N , so let g = exp(X /N ) and h = exp(Y /N ). Thus, exp(X )exp(Y ) = g N hN , and exp(X + Y ) =exp((X +Y )/N )N ≈ (g h)N up to terms of quadratic order. The computation this formula gives is the error termgoing from g N hN to (g h)N , and the error term is several factors of (g−1h−1 g h), which near the identity is determinedby the Lie bracket. The actual computation, though, is rather ugly.
5. THE BAKER-CAMPBELL-HAUSDORFF FORMULA: 4/9/14
Recall that last time, we let G be a Lie group and T = Te G, along with a Lie bracket T ×T → T , which indicateshow the commutator behaves near the origin. Then, we defined the exponential map exp : T →G such that for anyX ∈ T , exp(tX ) is a smooth homomorphism R→G such that
ddt(exp(tX ))
�
�
�
t=0=X .
The goal of the Baker-Campbell-Hausdorff formula is to write exp(X )exp(Y ) = exp(F (X ,Y )), where F is a powerseries given by the Lie bracket — the point is really that such a formula exists (and Dynkin gives a much cleaner resultonce a formula is shown to exist). Part of the statement is checking that all of the relevant error terms go to 0, andthat the series converges. These are not difficult, but will be omitted.
Without further computation, one can deduce that F must be a smooth function, and by the group laws,F (−X ,−Y ) = −F (X ,Y ), because exp(−X ) = exp(X )−1 (since it’s a homomorphism), and that F (X , 0) = X andF (0,Y ) = Y . Thus, F (X ,Y ) = X +Y + B(X ,Y ) + · · · , where the remaining terms are at least cubic in X and Y ,and B : T ×T is skew-symmetric. Then, by computing the commutator from the Lie bracket, B(X ,Y ) = [X ,Y ]/2.Thus, the point is to show that the higher-order terms are determined.
Example 5.1.(1) When G =GLn(R), then T =Mn(R) and exp= eX .(2) For the orthogonal group O(n), this is a smooth submanifold, so (as in the homework) its tangent space is
T = {X ∈Mn(R) |X +X T= 0}, and by the uniqueness of the exponential map, exp(X ) = eX still. Thus, theexponential of a skew-symmetric matrix is orthogonal (which can be checked by other means. . . but this isstill pretty neat).
(3) If G = U(n), then T = {X ∈ Mn(R) | X + XT= 0} (i.e. the space of skew-Hermitian matrices), and
exp(X ) = eX again (for the same reason: its uniqueness on GLn(R) implies it’s the same on its subgroups), sothe exponential of a skew-Hermitian matrix is unitary. (
Functoriality. Suppose ϕ : G→G′ is a homomorphism of Lie groups, i.e. a smooth group homomorphism. Then,dϕ : T → T ′ (where T = Te G and T ′ = Te G′, and the derivative is understood to be at the identity) respectsLie brackets, and is thus a homomorphism of Lie algebras; that is, for all X ,Y ∈ T , [dϕ(X ), dϕ(Y )] = dϕ[X ,Y ],because ϕ(xy x−1y−1) = ϕ(x)ϕ(y)ϕ(x)−1ϕ(y)−1, so the structure follows over. Thus, constructing the tangent
10

space is functorial. Moreover, ϕ(expX ) = exp(dϕ(X )), because t 7→ ϕ(exp(tX )) and t 7→ exp(tdϕ(X )) are bothhomomorphisms R→G with the same derivative. That is, the following diagram commutes.
Tdϕ //
exp
��
T ′
exp��
Gϕ // G′
Conjugation and the Adjoint. For x ∈ G, g 7→ x g x−1 is a smooth isomorphism G → G, so one can defineAd : T → T to be its derivative.
Example 5.2. Suppose G =GLn(R), Y ∈Mn(R), and x ∈G. Then, Ad(x)Y = xY x−1 (there is something to showhere; you have to compute a derivative). Then, the same formula holds for subgroups of GLn(R). (
In other words, a Lie group acts on its own tangent space, and Ad is just multiplication near the identity. Sinceexp is compatible with homomorphisms, as discussed above, then exp(Ad(x)Y ) = x exp(Y )x−1.
Now, there’s a map x 7→ Ad(x), going from G → GL(T ), since Ad(x) is always an isomorphism (which isisomorphic to GLd (R) for some d = dim(T )), so differentiating Ad induces a map ad : T → Lie(GL(T )) = End(T ).This last equivalence is because for any vector space V , TeGL(V ) = End(V ), so, once one chooses coordinates,TeGLn(R)∼=Mn(R).
Proposition 5.3. ad(X ) is differentiated conjugation: ad(X )(Y ) = [X ,Y ].
This makes ad(X ) seem like elaborate notation, but it will simplify things. For example, when G =GLn(R), thenad(X ) is the linear transformation Y 7→X Y −Y X .
Proof of Proposition 5.3. The proof boils down to unraveling the definition. Differentiating Ad(x) involves movingin G on a curve in the direction x,
ad(X )(Y ) =ddt
�
�
�
�
t=0Ad(e tX )(Y )
=ddt
�
�
�
�
t=0
dds
�
�
�
�
s=0(exp(tX )exp(sY )exp(−tX ))
=∂ 2
∂ t∂ s
�
�
�
�
�
t ,s=0
(exp(tX )exp(sY )exp(−tX )).
In the coordinates given by exp, multiplication is given by X ,Y 7→X +Y +[X ,Y ]/2+ · · · , so plugging in, we canextract the quadratic terms:
exp(tX )exp(sY )exp(−tX ) = exp(sY + t s[X ,Y ]+higher-order-terms. . . ),
so the quadratic term is [X ,Y ]. �
Since the Lie bracket pins down term up to quadratic order, lower-order terms can be given in terms of it (thoughhigher-order terms require more trickery).
It will also be useful to have that g exp(Y )g−1 = exp(Ad(g )Y ) and, since homomorphisms are compatible withthe exponential map, then Ad(exp(X )) = exp(ad(X )).
Proving the Formula. For large N , we want exp(X ) = exp(X /N )N , so let g = exp(X /N ) and h = exp(Y /N ), andnow we want to compare g N hN with (g h)n ≈ exp(X +Y ). Intuitively, there are a bunch of commutators, which aregiven in terms of the Lie bracket, but it’s painful to write them out directly.
First, we’ll compute exp(X )exp(Y ) to first order in Y (i.e., assuming that Y is small; there are infinitely manyfirst-order terms in the formula, but within more and more iterated Lie brackets). Then,
exp(X +Y ) = exp�X +Y
N
�N≈�
exp�X
N
�
exp�Y
N
��N(5.4)
11

with error quadratic in N , so that (5.4) is true as N →∞, in the limit. Then, take some commutators:
= exp�X
N
�
exp�Y
N
�
· · ·exp�X
N
�
exp�Y
N
�
=�
exp�X
N
�
exp�Y
N
�
exp�X
N
���
exp�
2XN
�
exp�Y
N
�
exp�
2XN
��
· · ·�
expX exp�Y
N
�
expX�
expX
= exp�
Ad�
exp�X
N
��YN
�
exp�
Ad�
exp�
2XN
��YN
�
· · ·exp�
Ad(exp(X ))YN
�
expX .
Here, we use the fact that Y is small to put these together:
≈ exp�
Ad�
exp�X
N
��YN+Ad
�
exp�
2XN
�YN
�
+ · · ·+Ad�
exp(X )XN
��
expX ,
which is true up to an error of size ‖Y ‖2, i.e. to first-order in Y . (Specifically, if ‖·‖ is some norm on the tangentspace, then exp(X +Y ) = exp(Error)expX expY , where |Error| ≤ cX ‖Y ‖
2, where cX is constant in X .) Then, asN →∞, this can be replaced by an integral:
= exp�∫ 1
0Ad(exp(tX ))Y dt
�
exp(X )
= exp�∫ 1
0exp(t ad(X ))Y dt
�
exp(X ).
Here, ad(X ) ∈ End(T ), so exp(t ad(X )) ∈GL(T ) is the usual matrix exponential.
= exp�
eadX − 1adX
Y�
exp(X ). (5.5)
This integral means the power series integrated term-by-term, so for M ∈Mn(R),
eM − 1M
=∞∑
i=1
1i !
M i−1.
In summary, for small Y ,
exp(X +Y ) = exp�
ead(X )− 1ad(X )
Y�
exp(X )E , (5.6)
where E is the error, at distance less than a constant in X times ‖Y ‖2 from the identity. This is kind of ghastly as aresult, but the proof technique is most important, rather than the specific result.
More generally, let Z(t ) be such that exp(Z(t ))) = exp(X )exp(Y ), restricting to a neighborhood in which exp is adiffeomorphism. Then, Z(0) = 0, and we want to find Z(1), which we’ll derive from (5.5); then, its solution will endup only depending on iterated Lie brackets.
6. A MANIFOLD-THEORETIC PERSPECTIVE: 4/11/14
First, we will finish the proof sketch of the Baker-Campbell-Hausdorff formula. The goal is to write down aformula for multiplying exponentials of a Lie group: exp(X )exp(Y ) = exp(F (X ,Y )). last time, we showed (5.6),where the error term is quadratic in Y (or more precisely, its distance from the identity). Recall also that adX : T → Tsends Z 7→ [X ,Z].
If you’re unhappy with this error term formulation, an alternate way of saying it is that
ddY
�
�
�
�
Y=0(exp(X +Y )exp(−X )) =
exp(adX )− 1adX
,
which is a map T → T . That is, (5.6) computes the derivative of exp. Thus,
exp(adX )− 1adX
(Y ) =∑
i≥1
(adX )i−1
i !Y = Y +
[X ,Y ]2
+[X , [X ,Y ]]
6+ · · · ,
which will be all the terms in the final formula that are linear in Y .Now, when Y isn’t necessarily small, one can use (5.6) to get to the full formula.
12

Proof. The power series is 1+ ad(X )+ · · · , i.e. a small perturbation of the identity map, so exp(ad(X )− 1)/ad(X ) isinvertible for X (as a transformation or a matrix) in a neighborhood of 0. Call its inverse ad(X )/(exp(ad(X ))− 1), sowhen X is in this neighborhood,
exp�
X +adX
ead x − 1Y�
= exp(Y )exp(X )(error), (6.1)
where the error is still quadratic in Y . Similarly, if one commutes things in the opposite order, the X and Y on theopposite side are switched, and the error is still quadratic in Y .
Let log : T → G sending 0 → e be an inverse to exp on an open neighborhood of 0. Then, let Z(t ) =log(exp(tX )exp(tY )), so that Z(0) = 0 and the goal is to compute Z(1). Then,
exp(Z(t )+ ε) = exp((t + ε)X )exp((t + ε)Y ) = exp(εX )exp(tX )exp(tY )exp(εY )= exp(εX )exp(Z(t ))exp(εY ).
When ε is small, (6.1) applies to the right-hand side, so to first order,
= exp�
Z(t )+adZ(t )
eadZ(t )− 1(εX ) =
(−adZ(t ))e−adZ(t )− 1
(εY )�
, (6.2)
i.e.dZdt=
adZ(t )eadZ(t )− 1
X −adZ(t )
eadZ(t )− 1Y.
But these are just big piles of iterated commutators, so write Z(t ) =∑
t nZn and solve, so that Zn is just a linearcombination of iterated Lie brackets. This is totally unhelpful for actually finding the formula, but when X and Yare small, this converges, so the Baker-Campbell-Hausdorff formula does in fact exist, and is given by Z(1). �
The final formula is too complicated to be useful, but its existence is very helpful, as is the computation (6.2).
Approach via Manifolds. Following the book a little more closely, we’ll see a manifold-theoretic approach tounderstanding the exponential map and Lie’s theorem, as well as a very important result about closed subgroups.From now on, let g denote the Lie algebra of the Lie group G.
Recall that a vector fieldX is a smooth assignmentX : g 7→X (g ) ∈ Tg G. Also, let left-multiplication by a g ∈Gbe denoted lg : G→G, sending h 7→ g h. Since G is a Lie group, this is a smooth isomorphism.
Definition 6.3. A vector fieldX is left-invariant if for all g , h ∈G,X (h g ) = (D lh )X (g ).
If G is a Lie group, any X ∈ g gives a left-invariant vector field on G, and in fact there’s a unique left-invariant vectorfieldX such thatX (e) =X . Thus, there’s an isomorphism of vector spaces Ψ : g→{left-invariant G-vector fields}sending X 7→X as constructed above, its unique left-invariant extension.
In fact, the textbook defines the Lie algebra of a given Lie group as this space of left-invariant vector fields, withthe vector field bracket [X ,Y ] given as follows: a vector field X acts on a function f as a derivation, i.e. X fis the derivative of f in the direction X . Then, the vector bracket measures how much these fail to commute:[X ,Y ] f = (XY −YX ) f . Under the isometry Ψ above, the Lie bracket as we defined it on g is sent to this bracket,so [X ,Y ] 7→ [X ,Y ].
Geometrically, let flowX (t ) be the flow alongX for time t . Then,
flow−Y (ε)flow−X (−ε)flowY (ε)flowX (ε)≈ flow[X ,Y ](ε2),
and as ε→ 0, this gives another definition.Recall that an integral curve on a manifold M is a curve f : R→ M such that d f
dt =X ( f (t )) for someX . Thetheorem on the existence of ODEs implies that integral curves exist and are locally unique.
Proposition 6.4. Let X be a left-invariant vector field associated as above to an X ∈ g. Then, t 7→ exp(tX ) is theintegral curve ofX passing through e.
This can actually be taken as the definition for the exponential map,7 and makes it that much more obvious thatit’s smooth.
7As yet, it’s only defined locally, but one can use the fact that it’s a homomorphism to extend it to all of R.13

Y
''
X
UU
Y ++
X
YY
FIGURE 1. Geometric intuition behind the noncommutativity of the Lie bracket: the gap in theupper-right corner is [X ,Y ] =XY −YX .
Proof of Proposition 6.4. By definition, ddt (exp(X ))
�
�
�
t=0=X , so since it’s a homomorphism, exp((s+t )X ) = exp(sX )+
exp(tX ), soddt
�
�
�
�
t=0exp((s + t )X ) = (lexp(sX ))X =X (exp(sX )). �
From this point of view,8 one can check that [, ] satisfies the Jacobi identity
[X , [Y,Z]]+ [Y, [X ,Z]]+ [Z , [X ,Y ]] = 0, (6.5a)
or, a little more nicely, using skew-symmetry alone, that
ad(X )[Y,Z] = [Y, ad(X )Z]+ [ad(X )Y,Z], (6.5b)
i.e. the ad operation becomes like a derivative for the Lie bracket, in the sense of having a Leibniz rule.
Proof of (6.5a) and (6.5b). For (6.5a), one can expand via [X ,Y ] =XY −YX . Alternatively, one could prove itvia (6.5b): start with the fact that a homomorphism of Lie groups preserves the Lie bracket, so that
[Ad(g )Y,Ad(g )Z] =Ad(g )[Y,Z],
and then differentiate once. �
This motivates an alternate, abstract definition for Lie algebras.
Definition 6.6. A Lie algebra over R is a real9 vector space V together with a skew-symmetric bilinear form[, ] : V ×V →V satisfying the Jacobi identity.
In this sense, this discussion shows that every Lie group gives rise to a Lie algebra (in the abstract sense). It’s alsotrue that every abstract Lie algebra gives rise to a Lie group, but this ends up being less useful.
The point of the Baker-Campbell-Hausdorff formula is that a Lie algebra gives rise to a Lie group locally. There’salso a manifold-theoretic version of this proof, though it doesn’t lead to an explicit formula (which is OK, since wecare more about its existence). Essentially, the category of real Lie algebras is equivalent to the category of simplyconnected Lie groups (since homomorphisms can be locally extended), which will be discussed further in a laterlecture.
The proof sketch begins as follows: suppose G and G′ are Lie groups such that ϕ : g∼→ g′, so that the goal is to
locally produce a Φ : G∼→G′, meaning that Φ(expX ) = exp(ϕ(X )). We had obtained a homomorphism R→G via
an integral curve earlier, and want to make this more general.
Definition 6.7. Suppose M is a manifold of dimension d . Then,L ⊆ T M is a subbundle of the tangent bundle ofdimension k if for all x ∈M , there is a smoothly varying family of k-dimensional vector spacesLx ⊆ Tx M .
When k = 1, a 1-dimensional subbundle is akin to a vector field, but without keeping track of magnitude. Thus, aswas determined for vector fields in Proposition 6.4, one might want to “integrate” subbundles into k-dimensionalsubmanifolds, i.e. find a k-dimensional submanifold N ⊆M such that T M =L . That such a manifold exists meansthat there exists a smooth Φ : (ε,ε)k →M , such that DΦ(a) =LΦ(a), i.e. Im(Φ) is a submanifold of M and its tangentspace at the image of a point a isLΦ(a).
8There is a group-theoretic proof of the Jacobi identity, but it involves more fiddling around with commutators.9This definition can be made over any field.
14

Theorem 6.8 (Frobenius). Suppose M is a d -dimensional manifold and L ⊆ T M is a k-subbundle. Then, letting[L ,L ] = {[X ,Y ] | X ,Y ⊆L}, there exists an integral manifold forL iff [L ,L ] =L .
The proof will be given next lecture.
7. FROBENIUS’ THEOREM AND CLOSED SUBGROUPS: 4/14/14
Last time, we discussed Frobenius’ theorem, as a means to approach Lie’s theorem from a manifold-theoreticviewpoint. If G is a Lie group and g its Lie algebra, then an X ∈ g can be identified with a left-invariant vector fieldXsuch that exp(tX ) is the integral curve forX through e . The end goal is to show that if G and G′ have isomorphicLie algebras, then G ∼=G′ locally.
The proof will use Frobenius’ theorem, which was given last time, and states that if M is a d -dimensionalmanifold and L ⊆ T M is a k-dimensional subbundle (i.e. for each x, L (x) ⊆ Tx M is a k-dimensional subspace),then if [L ,L ] = L ,10 then L is locally integrable, i.e. there is a local coordinate chart U → Rd sending L →Span{∂1, . . . ,∂k} (here these mean the first k coordinates). In other words, there’s a coordinate system in whichLlooks flat.11
Proof of Theorem 6.8. Near some x ∈M , pick some vector fields X1, . . . ,Xk spanningL , so that if y is in a neighbor-hood of x, thenL (y) = ⟨X1(y), . . . ,Xk (y)⟩. That this can be done follows from the definition of a subbundle. Then,pick some coordinate system M →Rd near x, and write
X1 = a11∂x1+ a12∂x2
+ · · ·+ a1d∂xd
...
Xk = ak1∂x1+ ak2∂x2
+ · · ·+ akd∂xd.
Since the Xk span a k-dimensional space, then some k× k minor of the matrix (ai j ) is nondegenerate, so without lossof generality, assume it’s ∂x1
, . . . ,∂xk(since if not, one can shuffle some coordinates around). Thus, after some row
and column operations, it becomes diagonal, so
X1 = ∂1+(b1,k+1∂k+1+ · · ·+ b1,d∂d )X2 = ∂2+(b2,k+1∂k+1+ · · ·+ b2,d∂d ),
and so on. These still spanL locally, so now we can use the fact thatL is closed under Lie bracket. Using the factthat
[∂1, f ∂m] = ∂1( f ∂m)− f ∂m∂1
=∂ f∂ x1
∂m + f ∂1∂m − f ∂1∂m
=∂ f∂ x1
∂m ,
[X1,X2]must only have cross terms including ∂` for ` > k. However, since these must lie inL , then they can bewritten as a linear combination of the ∂1, . . . ,∂k , and thus the cross terms go to zero. Thus, [Xi ,X j ] = 0, soL isspanned by commuting vector fields.
Thus, their flows also commute, so one may define the coordinate chart
(a1, . . . ,ak , b1, . . . , bd−k ) 7−→ (flowX1(a1), . . . ,flowXk
(ak ))(0, . . . , 0, b1, . . . , bk ).
With respect to this coordinate chart,L = Span(∂1, . . . ,∂k ). �
This last step can be done iffL is closed under Lie bracket.Returning to Lie groups, supposing one has a ϕ : g
∼→ g′, it will be possible to construct a Φ : G∼→G′ by looking
at graphs. We already know it must obey Φ(expX ) = exp(ϕ(X )), but need to show that it preserves multiplication.Instead of producing Φ explicitly, one can provide its graph {(g ,Φ(g ))} ⊂G×G′.
10This means that for allX ,Y ∈L , [X ,Y ] ∈L .11This is analogous to the rectification theorem for vector fields in the theory of ODEs.
15

Proposition 7.1. If G is a Lie group and g its Lie algebra, then if h⊂ g is a Lie subalgebra (i.e. a subspace closed under theLie bracket), then there exists a Lie group H with Lie algebra h, and a smooth homomorphism f : H →G inducing h→ g.
Example 7.2. Let G =R2/Z2, so that g=R2. This isn’t a very interesting Lie algebra, since it’s commutative, so[, ] = 0. Thus, any subspace is a Lie subalgebra, such as h = {(x,ax)} for some given a. If a ∈ Q, then there doesexist a closed subgroup H ⊆G with Lie(H ) = h, but if not, then such a subgroup would be dense in G, which is thereasoning behind the seemingly clumsy wording of the fact. (
Proof of Proposition 7.1. For the scope of this proof, given a Lie group G and its Lie algebra g, letX = L(X ) denotethe unique left-invariant vector field on G induced by an X ∈ g, as discussed before.
Let h⊂ T G be the subbundle defined by {L(X ) : X ∈ h}. Then, [h,h]⊆ h, since any Y ∈ h can be written as alinear combination of L(Xi ) for Xi ∈ h. Thus, invoking Frobenius’ theorem, take H to be the integral manifold of hthrough e ,12 i.e. choose a chart f : G→Rd near e (where d = dim(G)) sending h→ ⟨∂1, . . . ,∂k⟩, and let H be thegroup generated by f −1(x1, . . . , xk , 0, . . . , 0).
In general, H is dense in G, but we can topologize it differently: define a system of neighborhoods for e ∈ Has { f −1(V ) |V is an open neighborhood of f (e) ∈R2}. Thus, H becomes a topological group, and using f , a Liegroup, and the inclusion is smooth. There are several things to check here, but the point is that Frobeinus’ theoremdoes the hard work. �
Now, given some isomorphism ϕ : g→ g′ of Lie algebras, let h = graph(ϕ) ⊆ g× g′, so by the above one hasH →G×G′ with Lie algebra h and such that the projections H →G and H →G′ are diffeomorphisms near e . Thus,H locally gives a graph of a diffeomorphism G→G′, and since H is a subgroup of G×G′, then this diffeomorphismalso locally preserves multiplication and inversion. This implies Lie’s theorem.
We’re not really going to use the above result, but there are two very useful facts coming from this viewpoint.
Theorem 7.3. Suppose G is a Lie group and H ⊆G is a closed subgroup. Then, H is a submanifold of G, and thus a Liesubgroup.
Corollary 7.4. If Gϕ→G′ is a continuous group homomorphism of Lie groups, then it’s smooth.
This last corollary is particularly useful when discussing continuous representations of compact Lie groups.
Proof of Theorem 7.3. This proof will find an h⊂ g such that H = exp(h) near e ; that is, for some neighborhood Vof 0 in g, exp(h∩V ) =H ∩ exp(V ). This is equivalent to exp near e identifying h with a subspace of g (i.e. this is acoordinate chart in which h is flat). This implies that H is a submanifold, and then checking the group operations aresmooth is easy.
To produce h, look at how H approaches e . Let log : G→ g be a local inverse to the exponential, and let h bethe set of all limits in g of sequences of the form tn log(hn) with tn ∈R and hn→ e (intuitively, the tn allow one torescale the sequence if necessary).
Then, if X ∈ h, then exp(X ) ∈H , because we can write X = limn→∞ tn log(hn), but hn → e , so tn →∞ (unlessX = 0, but this case is trivial). Let mn be the nearest integer to tn , so that
exp(X ) = limn→∞(exp(tn log(hn))) = lim
n→∞h mn
n︸︷︷︸
in H
(exp(tn −mn) log hn).
Since tn −mn ≤ 1 for all n and H is closed, this implies exp(X ) ∈H .Next, we have to check that h is a subspace of g; it’s closed under scalars by definition, and if X ,Y ∈ h, then
tX , tY ∈ h for all t ∈R, so exp(tX )exp(tY ) ∈H . But log(exp(tX )exp(tY )) =X +Y + · · · (higher-order terms), soX +Y ∈H after taking a suitable sequence and rescaling.
Finally, we will need to show next lecture that H = exp(h) locally, so to speak. This begins by picking a w ⊆ gtransverse to h, and so on. . .
8. COVERING GROUPS: 4/16/14
Last time, we were in the process of showing that if G is a Lie group and H ⊆G is a closed subgroup, then H is asubmanifold of G and thus a Lie subgroup. We defined h to be the set of limits of sequences of the form tn log(hn),where tn ∈R and hn→ e in G, a subspace of g. If X ∈ h, then exp(X ) ∈H .
12The theorem technically only gives a local result, but it can and should be extended globally.16
Then, we can show that there’s a neighborhood V of 0 in h such that exp(V ) is a neighborhood of the identity inH ; then, by translation, one gets a similar chart around any x ∈H , so H is in fact a submanifold.
Pick a transversal subspace w ⊆ g, so that w⊕h= g. Then, the map (Y ∈ w,X ∈ h) 7→ exp(X )exp(Y ) has derivative(Y,X ) 7→ Y +X ; since w and h are transversal, then this is an isomorphism w ⊕ h
∼→ g, so (Y,X ) 7→ exp(X )exp(Y )is a local diffeomorphism.
Suppose there exists a sequence hm ∈ H such that hm → e , but such that log(hm) 6∈ H . Then, we can writehm = exp(Ym)exp(Xm) with Ym 6= 0 (since log(hm) 6∈H ), so exp(Ym) = hm exp(−Xm) ∈H (since Xm ∈ h), and thusany rescaled limit of the Ym , i.e. lim tm ym with tm ∈R, exists. (This has to do with the compactness of w.) Thus, itbelongs to w as well as h, so it must be zero.
This makes it much easier to tell when something is a Lie subgroup (e.g. O(n), U(n)).Note that in Corollary 7.4, continuity is necessary; for example, if ϕ ∈ Aut(C), then it induces discontinuous
group automorphisms on GLn(C), and so on.
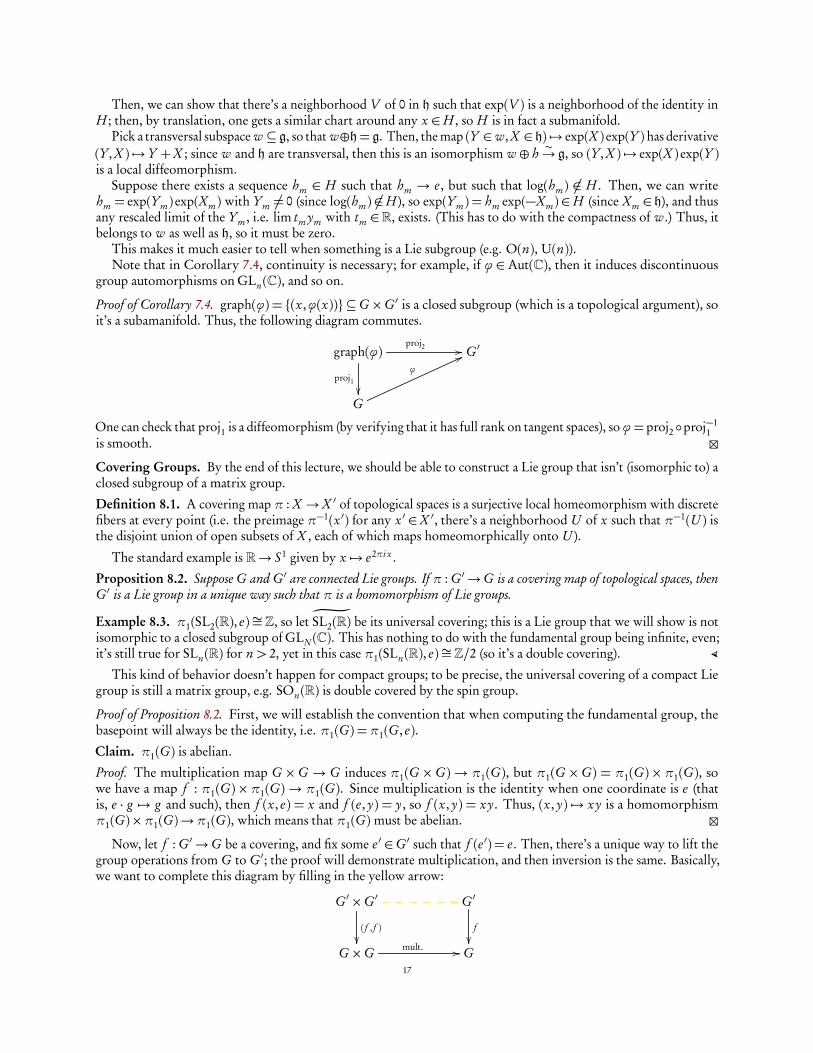
Proof of Corollary 7.4. graph(ϕ) = {(x,ϕ(x))} ⊆G×G′ is a closed subgroup (which is a topological argument), soit’s a subamanifold. Thus, the following diagram commutes.
graph(ϕ)proj2 //
proj1��
G′
G
ϕ
66
One can check that proj1 is a diffeomorphism (by verifying that it has full rank on tangent spaces), soϕ = proj2 ◦proj−11
is smooth. �
Covering Groups. By the end of this lecture, we should be able to construct a Lie group that isn’t (isomorphic to) aclosed subgroup of a matrix group.
Definition 8.1. A covering map π : X →X ′ of topological spaces is a surjective local homeomorphism with discretefibers at every point (i.e. the preimage π−1(x ′) for any x ′ ∈X ′, there’s a neighborhood U of x such that π−1(U ) isthe disjoint union of open subsets of X , each of which maps homeomorphically onto U ).
The standard example is R→ S1 given by x 7→ e2πi x .
Proposition 8.2. Suppose G and G′ are connected Lie groups. If π : G′→G is a covering map of topological spaces, thenG′ is a Lie group in a unique way such that π is a homomorphism of Lie groups.
Example 8.3. π1(SL2(R), e)∼=Z, so let ãSL2(R) be its universal covering; this is a Lie group that we will show is notisomorphic to a closed subgroup of GLN (C). This has nothing to do with the fundamental group being infinite, even;it’s still true for SLn(R) for n > 2, yet in this case π1(SLn(R), e)∼=Z/2 (so it’s a double covering). (
This kind of behavior doesn’t happen for compact groups; to be precise, the universal covering of a compact Liegroup is still a matrix group, e.g. SOn(R) is double covered by the spin group.
Proof of Proposition 8.2. First, we will establish the convention that when computing the fundamental group, thebasepoint will always be the identity, i.e. π1(G) =π1(G, e).Claim. π1(G) is abelian.
Proof. The multiplication map G ×G → G induces π1(G ×G)→ π1(G), but π1(G ×G) = π1(G)×π1(G), sowe have a map f : π1(G)×π1(G)→ π1(G). Since multiplication is the identity when one coordinate is e (thatis, e · g 7→ g and such), then f (x, e) = x and f (e , y) = y, so f (x, y) = xy. Thus, (x, y) 7→ xy is a homomorphismπ1(G)×π1(G)→π1(G), which means that π1(G)must be abelian. �
Now, let f : G′→G be a covering, and fix some e ′ ∈G′ such that f (e ′) = e . Then, there’s a unique way to lift thegroup operations from G to G′; the proof will demonstrate multiplication, and then inversion is the same. Basically,we want to complete this diagram by filling in the yellow arrow:
G′×G′
( f , f )��
// G′
f��
G×G mult. // G17

There’s a simple criterion for when one can lift maps to a covering: suppose f : eY → Y is a covering map andα : X → Yis continuous. Then, α lifts to an eα such that the following diagram commutes precisely when α∗π1(X )⊆ f∗π1(Y ).This follows from the definition of a covering.
eY
f��
X
eα
??
α // Y
However, everything here is done in the category of pointed, connected topological spaces, i.e. we assume f and αpreserve basepoints and all of the relevant spaces are connected.
Thus, back in Lie-group-land, we want to lift ξ =mult◦( f , f ) : G′×G′→G to some map ξ : G′×G′→G′. Inour course, all basepoints are the identity: e for G, and the specified e ′ for G′. Then,
ξ ∗π1(G′×G′) = [mult]∗( f∗π1(G
′)× f∗π1(G′))
= f∗π1(G′)+ f∗π1(G
′)
⊆ f∗π1(G′).
Thus, ξ lifts to ξ , so there’s a smooth lift, and now one needs to check that it satisfies the group laws. This isa bunch of chasing axioms, but for example, for associativity, (xy)z and x(y z) agree after projection to G, sox(y z) = ((xy)z)a(x, y, z) for some continuous a that is in ker( f ). But since ker( f ) is discrete, then a = e ′ (sinceeverything must preserve basepoints, so e must become the identity). �
In particular, if G is a connected Lie group, then its universal covering eG also has the structure of a Lie group, andis simply connected.
Proposition 8.4. If G and H are Lie groups and G is simply connected,13 then any homomorphism of Lie algebraϕ : g→ h is the derivative of some smooth homomorphism of Lie groups Φ : G→H .
This is a pretty powerful result: we already knew that Φ existed locally, but if G is simply connected, then we’reallowed to extend it globally. (This can in general be done with the universal cover of G, even when G isn’t simplyconnected.)
As a degenerate example, if G =H =R/Z (which is not simply connected), then x 7→ xp
2 on their respective Liealgebras doesn’t lift to a map G→H . However, this will always lift to a map from the universal cover of G, and wedo indeed have an induced map R→H .
Proof of Proposition 8.4. By the BCH formula, the rule exp(X ) F7→ exp(ϕ(X )) is at least a local homomorphism, i.e. itgoes from an open neighborhood U of e ∈G to an open neighborhood V of e ∈H and such that for all u, u ′ ∈U ,F (u)F (u ′) = F (u u ′) whenever both sides make sense (e.g. u u ′ 6∈ U , or F (u)F (u ′) 6∈V would be examples of notmaking sense).
The way to turn this into a global homomorphism is the same way one does analytic continuation of a function.Let γ : [0,1]→G be a path such that γ (0) = e . Define
Φ(γ ) = F (γ (0)−1γ (ε))F (γ (ε)−1γ (2ε)) · · ·F (γ (1− ε)−1γ (1)),
where ε is small. That F is a local homomorphism means that Φ(γ ) is independent of ε when it’s sufficiently small,and in fact Φ(γ ) depends only on the endpoint γ (1), so the homomorphism we want is γ (1) 7→ Φ(γ ). Why’s this?If one has two paths γ and γ ′ with the same endpoints, there’s a homotopy γt between them, since G is simplyconnected. Thus, Φ(γt ) is locally constant in t , so Φ(γ ) = Φ(γt ) = Φ(γ
′) (which is the same idea: break it into verysmall subsections). �
Now, we can answer why ãSL2(R) isn’t isomorphic to a closed subgroup of a matrix group. This is one of themany applications of Weyl’s unitary trick: suppose there is a continuous (and therefore smooth) homomorphism
f : ãSL2(R)→GLn(C); then, one has a map d f : Lie(SL2(R))→ Lie(GLN (C)), which is real linear. But then, one cancomplexify it: Lie(SL2(R))⊗RC= Lie(SL2(C)), given by the inclusion SL2(R)→ SL2(C) (the exact details of whichwill be on the homework). Thus, one can extend d f to a complex linear map d fC : Lie(SL2(C))→ Lie(GLN (C)) that
13This means that π1(G) is trivial, and in particular that it is connected.18

is a homomorphism of Lie algebras. But SL2(C) is simply connected, so there’s a map fC : SL2(C)→GLN (C) withderivative extending that of f , which will imply that f must factor through fC, and in particular through SL2(R),which will have interesting consequences next lecture.
The clever trick is that SL2(C) is simply connected, but SL2(R) isn’t.
9. HAAR MEASURE: 4/18/14
“What does ‘useful’ mean? There are people who use this. . . somewhere.”
Last time, we were in the middle of showing that the universal covering Gπ→ SLn(R) (with n ≥ 2) is a Lie group G
that doesn’t embed as a closed subgroup of GLN (C) for any N . We have already that
π1(SLn(R)) =¨
Z, n = 2Z/2, n > 2.
Continuation of the proof. The proof continues: if ϕ : G → GLN (C) is continuous (which will imply that it’sC∞), then we’ll show that ϕ factors through SLn(R), and therefore cannot be injective. This is because dϕ :Lie(G)→ Lie(GLn(C))∼=Mn(C), but Lie(G)∼= Lie(SLn(R)) (since π is a local homomorphism, and the Lie algebrais a local construction). Thus, the map can be extended complex-linearly to a homomorphism of Lie algebrasdϕC : Lie(SLn(C))→ Lie(GLN (C)).14
Since SLn(C) is simply connected, then dϕC is the derivative of a Φ : SLn(C)→GLN (C) (which we saw last time).
Thus, the composition Gπ→ SLn(R)
Φ→GLN (C) has the same derivative as ϕ : G→GLN (C), so they must be equal.This fact in question is that if ϕ1,ϕ2 : G→G′ are homomorphisms of Lie groups with the same derivative and if G1is connected, then they’re equal, which is true because they’re equal near e thanks to the exponential map, and anopen neighborhood of e generates an open-and-closed subgroup, which thus must be G. Thus, ϕ factors throughSLn(R). �
Another way to word this is that no finite-dimensional representation can tell the difference between G andSLn(R), much like how SLn(C), SLn(R), and SUn all have the same representation theory. This, like the above, usesWeyl’s unitary trick.
Let’s compute the fundamental group of SL2(R). If a matrix in SL2(R) is written�
a bc d
�
, then once one chooses
(c , d ) ∈R2 \ {0}, then a and b are determined up to a line, so this space is contractible. Thus, SL2(R)∼R2 \ {0} ∼ S1
(where ∼ denotes homotopy equivalence), so the fundamental group is Z. Similarly, SL2(C) is simply connectedbecause it’s homotopy equivalent to C2 \ {0} ∼ S3, which is simply connected.
In more generality, one uses fibrations for larger n. For example, SOn acts on Sn−1, and the stabilizer of any pointis isomorphic to SOn−1; thus, there’s a fibration SOn−1→ SOn→ Sn−1, leading to a long exact sequence of homotopygroups π j . This allows one to easily compute the fundamental groups of all Lie groups that are matrix groups, andfor reference, they’re listed here: π1(SOn) =Z/2 when n > 2 and π1(SO2) =Z; π1(SUn) =π1(SLn(C)) is the trivialgroup for n ≥ 2, and π1(Un) =π1(GLn(C)) =Z.
Theorem 9.1. Let G be a Lie group; then, up to scaling, there is a unique left-invariant measure on G (i.e. for all S ⊆Gand g ∈G, µ(g S) =µ(S)). The same is true for right-invariance.
By “measure” this theorem means a Radon measure, on σ -algebras and Borel sets and so on. But it’s more usefulto think about this as giving an integration operator from CC (G)→ R (i.e. from the set of compactly supportedfunctions on G); that is, a continuous functional such that
∫
GLh f dg =
∫
Gf dg ,
where f ∈CC (G) and Lh f denotes a left-translate by an h ∈G.For a simple example, when G = (R,+), the Haar measure is the Lesbegue measure, and the left-invariance tells us
that this is invariant under translation.In GLn(R), one could intuitively use the induced Lesbegue measure µL from Mn(R), but µL(g S) = det(g )nµL(S),
since this is in Rn×n , so there are n copies of the determinant; the point is it isn’t invariant. If one instead takes
14This is also complex linear, but that’s not crucial to the point of the proof.19

µL/detn , this becomes a left- and right-invariant measure. In general, the left- and right-invariant measures don’thave to be the same, such as for the Haar measure on
G =§�
a b0 1
�
: a, b ∈Rª
,
but they do coincide for compact groups (as we will be able to show). But one can do better: if you normalize themeasure, so that µ(G) = 1, then there is a unique left-invariant probability measure on G, and it is also right-invariant.For the rest of the course, this probabilistic measure is what is meant by Haar measure unless otherwise specified.
The above is actually true for any locally compact topological space, but the proof is harder, and in any class ofgroups one might apply this to, one can just compute the Haar measure anyways.
Proof of Theorem 9.1. This proof looks constructive, but don’t let it fool you: the “formula” is totally unhelpful.To construct the desired measure µ, let n = dim(G) and µ= |ω|, whereω is a differential form of top degree (so
that it can be integrated). Such anω exists because it can be defined in terms of invariants: for someω0 ∈ ∧n(Te G)∗,letω(g ) = (lg−1 )∗ω0. This is valid for the same reason left-invariant vector fields can be constructed from vectors inTe G when constructing the Lie algebra: once you’re somewhere, you can be everywhere. Thus,ω is left-invariant,i.e. (lx )
∗ω =ω, so µ= |ω| is left-invariant too.Suppose ν is another left-invariant measure; then, it’s absolutely continuous for µ, i.e. if S has zero measure
for ν, then it does for µ. This fact is true only because µ is G-invariant. Thus, ν = f µ for some f ∈ L2(µ) by theRadon-Nicholson theorem, but this means f is left-invariant, so it must be constant. �
If you really had to compute this, you could: let’s make this explicit in a more complicated case than just thegeneral linear group,
SL2(R) =§�
x yz w
�
| xw − y z = 1ª
.
Then, the map SL2(R)→ R3 sending [ x yz w ] 7→ (x, y, z) is bijective away from x = 0. Then, the Haar measure in
SL2(R) will be a function of the Lesbegue measure on R3.First, let’s write down a left-invariant 3-form on SL2(R). Though it’s possible to do it systematically, in general it’s
better to guess and hope for the best. Let
g−1 dg =�
w −y−z x
��
dx dydz dw
�
=�
w dx − y dz w dy − y dw−z dx + x dz −z dy + x dw
�
.
This is left-invariant, because when left-multiplying by h, it becomes g−1h−1h dg , which cancels out nicely. Thus,the entries give four left-invariant one-forms (though they’re not linearly independent), three of which span the spaceof one-forms. Thus, one can make an invariant 3-form by wedging any three of them together, and the specific choiceonly matters up to a constant factor. For example, because d(xw − y z) = 0, then it’s possible to simplify
(w dy − y dz)∧ (w dy − y du)∧ (−z dx + x dz)
into a big mess of wedges which eventually becomes
dx ∧ dy ∧ dzx
.
In other words, away from x = 0, the Haar measure looks like 1/x times the Lesbegue measure.This is systematic in that it works for any matrix group, but it’s worth thinking about why it’s so simple in the
end, and also worth investigating for SLn(R).In the case of compact topological groups, there’s a more abstract proof illustrating another way to think about the
Haar measue. A probability measure is, after all, a notion of a random element of G, and µ(S) is the probability thata random element lies in the set S . So how might we actually draw random elements from this distribution? The goalis to produce a sequence g1, g2, . . . in G such that, for nice S ⊆G, #{1≤ i ≤ n : gi ∈ S}/n→µ(S). For example, on
SU2 =��
a b−b a
�
, |a|2+ |b |2 = 1 for a, b ∈C�
,
which can be embedded as S3 ⊆R4, the “area measure” on this sphere ends up being the Haar measure (though this isthree-dimensional area).
20

Proposition 9.2. Choose some x1, . . . , xn ∈G that generate a dense subgroup (i.e. ⟨x1, . . . , xn⟩=G).15 Then, a randomsequence in G can be obtained by gi+1 = gi xr , where r = 1, . . . , n is chosen randomly, and this sequence samples from theHaar measure.
10. APPLICATIONS TO REPRESENTATION THEORY: 4/21/14
Throughout today’s lecture, let G be a compact group; we’ll be applying these results specifically to compact Liegroups, but the proofs are the same in this greater generality.
Last time, we constructed the Haar measure with differential forms. Now, we can give a different construction forcompact groups: choose g1, . . . , gN ∈G that span a dense subset of G.16 Then, pick some large K and for 1≤ k ≤K ,setting g = x1, . . . , xk , where each xi is chosen uniformly at random from {g1, . . . , gN }, samples at random from theHaar measure.
In order to formulate this more precisely, given this set {g1, . . . , gN }, define operators L and R for left averagingwith it:
L f (g ) =1N( f (g1 g )+ · · ·+ f (gN g ))
R f (g ) =1N( f (g g1)+ · · ·+ f (g gN ))
Proposition 10.1. If C (G) denotes the set of continuous functions on G (which has a topology induced from the supremumnorm), then for any f ∈C (G),
limK→∞
1K
K∑
k=1
Lk f (e) = limK→∞
1K
K∑
k=1
Rk f (e) =∫
f dµ,
where µ is the Haar measure.
This will be shown to define a left- and right-invariant measure, and then that such a measure is unique. Specifically,we’ll show that
1K
K∑
k=1
Lk f (e)−→ c ,
where c is some constant function (and the convergence is in the topology induced by the supremum norm), and thesame for Rk f .
Proof of Proposition 10.1. Let fK =∑K
1 Lk f and f ′K =∑K
1 Rk f .Note that if F ∈C (G) is fixed by left averaging, then F must be constant,17 because it’s a function on a compact
space, so look at the x such that |F (x)| is maximized; then, F (gi x) = F (x) for all i , and then iterating, F (gi g j x) = F (x),
and so on. But since ⟨g1, . . . , gN ⟩=G, then F must be constant.The collection { fK} is precompact, which is to say that it has compact closure in C (G), and (more useful for this
proof) it has a convergent subsequence. Then, the proof boils down to checking that they’re equicontinuous, i.e.continuous in a uniform manner in K . This uniformity and the existence of a convergent subsequence means that theoverall limit must exist.
But this ends up being true by a translation argument, and the argument for f ′K is identical, so there’s a subsequenceof { fK} converging to a limit: fKn
→ f∞. This f∞ must be a constant, because
L fK − fK =Lk+1 f − f
K≤
2‖ f ‖∞K
→ 0,
and thus L f∞ = f∞, so f∞ is a constant, as seen above. Thus, any convergent subsequence of { fK} converges to aconstant function on G — though the constant can depend on f .
Now, let’s look at any convergent subsequence of right averages: f ′Kn→ f ′∞, which by the same reasoning must
be constant. But left and right averaging commute, so take this f ′∞ and left-average it, so it must be equal to f∞.
15This is allowed to be an infinite sequence of xi , if you want.16Note that this actually can’t be done in the case of an arbitrary compact topological group, though it is possible for compact Lie groups.
This isn’t too much of a setback, however; the proof can easily be adapted to an infinite spanning set by choosing an arbitrary G-valued probabilitymeasure and replacing the averaging operators with integrals across this measure.
17This section of the proof resembles the proof of the maximum modulus principle.21
Thus, every convergent subsequence of f ′K converges to f∞, so since { f ′K} is precompact, then f ′K → f∞ as well. Thenreversing left and right, fK → f∞ too.
Let ν( f ) be the constant induced by a given f ∈C (G), so that f 7→ ν( f ) is a continuous linear functional on C (G),so it’s a measure, and since ν( f )≥ 0 for f ≥ 0 and ν(1) = 1, then ν is a probability measure. Furthermore, by theconstruction above, ν is both left- and right-invariant.
If µ is any left-invariant probability measure, then apply it to (1/K)∑K
1 Lk f , and once all of the left-averaging isdone, µ( f ) = ν( f ). �
This argument is much harder in the noncompact case, and considerably less useful.
Basic Results from Representation Theory. Moving into representation theory, for the rest of the course, G willgenerally denote a compact group, and usually a Lie group. Right now, it doesn’t need to be Lie, at least until we startdifferentiating representations.
Definition 10.2. A representation of a topological group G is a continuous homomorphism ρ : G→GLN (C).
If G is Lie, then ρ is automatically smooth.All of the main results in the representation theory of finite groups still hold. These two will be particularly useful.
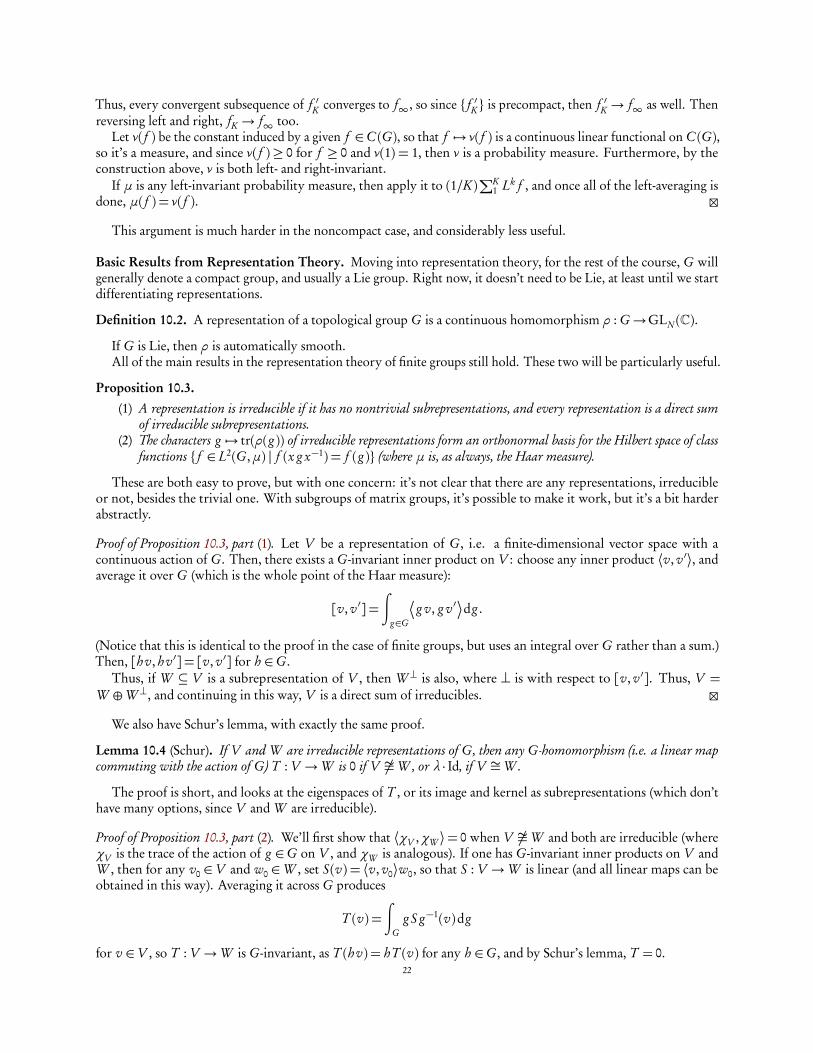
Proposition 10.3.
(1) A representation is irreducible if it has no nontrivial subrepresentations, and every representation is a direct sumof irreducible subrepresentations.
(2) The characters g 7→ tr(ρ(g )) of irreducible representations form an orthonormal basis for the Hilbert space of classfunctions { f ∈ L2(G,µ) | f (x g x−1) = f (g )} (where µ is, as always, the Haar measure).
These are both easy to prove, but with one concern: it’s not clear that there are any representations, irreducibleor not, besides the trivial one. With subgroups of matrix groups, it’s possible to make it work, but it’s a bit harderabstractly.
Proof of Proposition 10.3, part (1). Let V be a representation of G, i.e. a finite-dimensional vector space with acontinuous action of G. Then, there exists a G-invariant inner product on V : choose any inner product ⟨v, v ′⟩, andaverage it over G (which is the whole point of the Haar measure):
[v, v ′] =∫
g∈G
g v, g v ′�
dg .
(Notice that this is identical to the proof in the case of finite groups, but uses an integral over G rather than a sum.)Then, [hv, hv ′] = [v, v ′] for h ∈G.
Thus, if W ⊆ V is a subrepresentation of V , then W ⊥ is also, where ⊥ is with respect to [v, v ′]. Thus, V =W ⊕W ⊥, and continuing in this way, V is a direct sum of irreducibles. �
We also have Schur’s lemma, with exactly the same proof.
Lemma 10.4 (Schur). If V and W are irreducible representations of G, then any G-homomorphism (i.e. a linear mapcommuting with the action of G) T : V →W is 0 if V 6∼=W , or λ · Id, if V ∼=W .
The proof is short, and looks at the eigenspaces of T , or its image and kernel as subrepresentations (which don’thave many options, since V and W are irreducible).
Proof of Proposition 10.3, part (2). We’ll first show that ⟨χV ,χW ⟩= 0 when V 6∼=W and both are irreducible (whereχV is the trace of the action of g ∈G on V , and χW is analogous). If one has G-invariant inner products on V andW , then for any v0 ∈V and w0 ∈W , set S(v) = ⟨v, v0⟩w0, so that S : V →W is linear (and all linear maps can beobtained in this way). Averaging it across G produces
T (v) =∫
Gg S g−1(v)dg
for v ∈V , so T : V →W is G-invariant, as T (hv) = hT (v) for any h ∈G, and by Schur’s lemma, T = 0.22

This will imply orthogonality: g S g−1(v) =
g−1v, v0
�
g w0, so what this is saying is that∫
g∈G
g−1v, v0
�
g w0 dg = 0.18
Then, take the inner product with any w ∈W : by the G-invariance of the inner product,
g−1x, y�
= ⟨x, g y⟩ =⟨g y, x⟩, so
∫
g∈G⟨g v0, v⟩⟨g w0, w⟩dg = 0.
But if vi is an orthonormal basis for V , then
χV (g ) =∑
i
⟨g vi , vi ⟩,
and similarly for an orthonormal basis wi of W , but we’ve just shown that these terms are pointwise orthogonal, so⟨χV ,χW ⟩= 0. �
This proof used compactness implicitly in the Haar measure, and to get that g S g−1 converges to a continuouslinear functional. Thus, it is sometimes generalizable.
11. THE PETER-WEYL THEOREM: 4/23/14
Last time we showed that if G is a compact group, then every representation is a finite sum of irreducibles, and thecharacters of irreducible representations form an orthonormal basis for the space of class functions in L2(G) (thoughwe still need to show that if V is irreducible, then ⟨χV ,χV ⟩= 1).
These together imply that a representation V of G is determined up to isomorphism by its character, and that themultiplicity of an irreducible representation W in V is ⟨χV ,χW ⟩. Orthogonality comes from the fact that if V andW are irreducible and V 6∼=W , then HomG(V ,W ) = 0, and we saw that ⟨χV ,χW ⟩= dimHomG(V ,W ) in general.
What we still haven’t shown, though, is that the characters span a dense subset of L2(G), so that there existrepresentations other than the trivial one; this will be one of the consequences of the Peter-Weyl theorem. This isimportant; there exist groups where elements are only conjugate to powers of themselves, and thus there are nofinite-dimensional representations.
If n ≥ 3, then π1(SOn)∼= Z/2, so the universal cover G of SOn is a double cover. This is a compact Lie group,and it’s not immediately clear how to produce representations of G that don’t come from SOn . In the case of finitegroups, it’s possible to look at the space of functions acting on themselves, but here it’s necessary to have some sortof finite-dimensional point of view.
Definition 11.1. If f is a continuous function on a compact group G, then f is called left-finite if its left translates(g 7→ f (x g ) for some x ∈G) span a finite-dimensional vector space; right-finite functions are defined in the analogousway.
Theorem 11.2 (Peter-Weyl).
(1) The following are equivalent for a compact group G and a function f on G.• f is left-finite.• f is right-finite.• f (g ) = ⟨g u, v⟩V for a finite-dimensional G-representation V and u, v ∈V .
(2) Finite functions are dense in L2(G).
Sometimes, the term “the Peter-Weyl theorem” is only used for part 2 of this theorem.The point of this theorem is that there are “enough” finite-dimensional subspaces arising from representations, so
there are actually nonzero representations.
Example 11.3. If G =Un , then f is finite iff it is polynomial in the entries gi j and gi j as a matrix, though this is notobvious. (
18This is an integral on a finite-dimensional vector space, so take it componentwise.23

The Peter-Weyl theorem implies that the span of characters is dense in L2(G), so given any class function F and anε > 0, there is a finite-dimensional representation V and u, v ∈V such that
‖F −⟨g u, v⟩‖L2 ≤ ε.
F is already invariant under conjugation, so averaging under the conjugation action doesn’t do anything. And sinceconjugation is an isometry on L2(G), then it doesn’t change the L2-distance, so
F −∫
h∈G
⟨h g h−1uv⟩dh
L2
≤ ε.
This integral is spanned by characters: first, one can assume V is irreducible (and if not, split it into its irreduciblecomponents), so that for u, v ∈V ,
∫
h∈G
h g h−1u dh =χV (g )dimV
u.
In fact, since∫
h∈G h g h−1 was averaged over G, then it’s an endomorphism of V that commutes with G. Thus, bySchur’s lemma, it’s λ · Id, and λ can be computed with traces, as
tr�∫
h∈Gh g h−1
�
= χV (g ) = λdim(V ).
Proof of Theorem 11.2. For (1), suppose f is left-finite. Then, let Lg f denote the left translate of f by g , i.e. h 7→f (g h), and define Rg f similarly. If V is the span of the left translates of f , then f (g ) = Lg f (e). Since Lg is afunctional on a finite-dimensional space, then there exists a δ ∈ V such that f (g ) = ⟨Lg f ,δ⟩.19 Then, the otherdirections are analogous.
For (2), this is really easy if G is a closed subgroup of a matrix group (i.e. G ⊆GLN (C)). This is because polynomialsin gi j and gi j are finite functions (and in fact, thee are all of the finite functions, but this is harder to show), and thesefunctions are already dense in L2(G) (via the L∞ norm) by the Stone-Weierstrass theorem.
In the general case, we need a way to break up L2(G) into finite-dimensional subspaces, which involves producing acharacter L : L2(G)→ L2(G)with finite-dimensional eigenspaces, and that commutes with the right action of G; then,the eigenspaces will consist of finite functions. There are various examples for more specific cases, e.g. the Laplacianfor compact Lie groups, but for the general case we’ll use something that looks like the operator that yielded theHaar measure L f (x) = (1/N )
∑ni=1 f (gi x).
Let δ be a continuous function on G, and define
Lδ f (x) =∫
Gδ(g ) f (g x)dg .
In some sense, this is a convolution operator.20
Now, we have an operator Lδ : L2→ L2. It would be nice if it were self-adjoint, too. In the finite case for the Haarmeasure, the adjoint L∗ sends gi 7→ g−1
i , and is otherwise fine; thus, if δ(x) = δ(x−1), then Lδ is self-adjoint, andsince δ is continuous, then Lδ is compact. That is, for all ε there’s an operator F of finite rank (i.e. finite-rank image)such that ‖Lδ − F (v)‖ ≤ ε‖v‖, using the operator norm.
By the spectral theorem for compact, self-adjoint operators, L2 is a direct sum of finite-dimensional eigenspaces(well, for λ 6= 0), and the nonzero eigenspaces correspond to finite functions. In particular, any F ∈ L2 can beapproximated by a finite function Lδ f arbitrarily well (in the sense of L2); as the approximation gets better, δapproaches the Dirac delta function, supported on smaller and smaller neighborhoods of the identity, but with totalintegral 1. �
Some of the trickier aspects of this operator stuff are discussed in the textbook.
19Be careful; there really should be a factor of g−1 in the precise calculations, but that’s all right for the proof.20Another common definition uses instead δ(g−1) f (g−1 x)dg , but it doesn’t actually matter.
24

Classifying Representations: an Overview. The course will continue by classifying representations of compactLie groups, and, eventually, the Lie groups themselves. We’ll start with SU2, which is probably the most importantpart of the course, and can be written as
SU2 =��
a b−b a
�
| |a|2+ |b |2 = 1�
,
which is topologically equivalent to S3 ⊂R4. We’ll also talk about the closely related SO3, since SU2 is its doublecover, a universal cover. Thus, there is a continuous homomorphism SU2→ SO3 with kernel {±1}.21 The point is,most things about SO3 will follow from SU2, and are a bit easier to visualize.
One can identify SU2 with the group of quaternions with norm 1 (the norm of x+yi+z j+wk is x2+y2+z2+w2)by sending
�
a b−b a
�
7−→ a+ b j ,
since a, b ∈ C. This does end up being a homomorphism, and if a = x + i y and b = z + i w, then it gets sent tox + i y + z j +wk, and the condition |a|2+ |b |2 = 1 is equivalent to the condition of norm 1.
Now, given a quaternion q ∈ SU2, there’s a rotation in SO3 given by xi + y j + zk 7→ q(xi + y j + zk)q−1, whichpreserves x2 + y2 + z2, but shuffles the terms. Additionally, the adjoint map Ad(g ) = D(g x g−1), Ad : SU2 →GL(Lie(SU2)). BY differentiating the unitary condition, Lie(SU2)⊆ Lie(GL2(C)) =M2(C), and in fact, it is the set of
X ∈M2(C) such that X +XT= 0 and tr(X ) = 0, i.e.
Lie(SU2) =§�
ia b + i c−b + i c −ia
�
| a, b , c ∈Rª
⊆M2(C).
This is a three-dimensional vector space. Then, Ad(g ) : X 7→ gX g−1 preserves the quadratic form tr(X 2) =−2(a2+b 2+ c2). In particular, the matrix
�
e iθ 00 e−iθ
�
∈ SU2 is sent to the action of rotation by 2θ in SO3.
12. REPRESENTATIONS OF SO2 AND SU3: 4/25/14
“At some point, you notice things and become depressed at how long ago they were discovered. . . this is anextreme example.”
Last time, we defined a map π : SU2→ SO3, which is a double cover with kernel {Id,− Id} in terms of quaternions.It could also be thought of as the map Ad : SU2→Aut(Lie(SU2)), or
�
e iθ 00 e−iθ
�
7→ rot(2θ).We want to understand how to integrate things, especially class functions, within SU2 and thus SO3. SU2 is
intuitively the complex unit sphere (and thus three-dimensional): the Haar measure on it is the same as the areameasure of S3 ⊆R4, suitably normalized, and it’s invariant because the area measure of S3 is invariant under rotation.
Any element of SU2 is conjugate to an element of the type
rθ =�
e iθ 00 e−iθ
�
,
where θ is determined up to sign, so the conjugacy classes are parameterized by the rotation angle θ, with θ ∈ [0,π].Thus, if F is a class function, with F (θ) = F (rθ), then
∫
SU2
F =2π
∫ π
0F (θ) sin2θdθ. (12.1)
On SO3, this means that if one chooses a random rotation of three-dimensional space, there’s a similar formula(given by the induced measure from SU2) that states that the probability that the rotation angle ϕ is proportional tosin2(ϕ/2), so it’s unlikely to be small.
This will admit many generalizations.Here’s a proof of (12.1). Let ∼ denotes conjugacy and suppose
�
a b−b a
�
∼�
e iθ 00 e−iθ
�
,
21This means that SU2 = Spin(3); the spin groups are the universal covers of SOn .25

then one can take the trace a+a = 2cosθ, so Re(a) = cosθ. This projects S3 onto the real line (specifically, [−1,1]).22
Unlike the three-dimensional case, he induced measure from S3 depends on z: it becomesp
1− z2 dz. Lettingz = cosθ, this becomes sin2θdθ, and then it must be normalized to become a probability measure, leading to (12.1).
Irreducible Representations. Let Vn be the space of homogeneous polynomials on C2 of degree n (i.e. thosepolynomials with only top-degree terms). This is an (n+1)-dimensional representation of SU2, where g ·P (g x) = P (x),so g P (x) = P (g−1x)— it’s always slightly confusing for groups to act on functions
Claim. All of the Vn are irreducible, and give all of the irreducible representations of SU2.
Proof. This can be checked with character theory. Write Vn = ⟨xn , xn−1y, . . . , yn⟩, so the action of rθ is
rθ(xn) = e i nθxn
rθ(xn−1y) = e i(n−2)θxn−1y
and so on, i.e. rθ acts by the matrix
e i nθ
e i(n−2)θ
e i(n−4)θ
. . .e−i nθ
.
Thus, the character is
χVn(rθ) = e i nθ+ e i(n−2)θ+ · · ·+ e−i nθ
=e i(n+1)θ− e−i(n+1)θ
e iθ− e−iθ, (12.2)
since it’s a geometric series. Therefore
¬
χVn,χVn
¶
=2π
∫ π
0
�
e i(n+1)θ− e−i(n+1)θ
e iθ− e−iθ
�2
sin2θdθ
=2π
∫ π
0
14|e i(n+1)θ− e−i(n+1)θ|2 dθ
= 1,
so Vn is irreducible.23
To show that these complete the irreducible representations boils down to Fourier analysis on S1: somethingorthogonal to all of these would also have to be orthogonal to all functions of the form χVn
(θ) sin2θ, but this can beattacked with Fourier analysis. �
Thus, there’s a unique irreducible representation of SU2 for each n ≥ 1.One could actually have checked that the irreducible characters had the form (12.2) by pure thought, without
knowing the structure of Vn , as in the first few lectures with Un . The idea is that if W is an irreducible representation,then
χW (rθ) =∑
m∈Zam e i mθ
22Note that for S2 ⊆R3 projecting down onto the real line, via (x, y, z) 7→ z, the induced measure on R is dz/2; this fact, in different words,was known to Archimedes!
23Note that there’s a formula for the dimension:∫
G⟨g v1, v2⟩
g v ′1, v ′2�
dg =⟨v1, v ′1⟩⟨v2, v ′2⟩
dimV,
but for character calculations, this isn’t all that important.26

for some am ≥ 0, which comes from restricting W to a representation of the diagonal subgroup�
e iθ 00 e−iθ
�
. Then,⟨χW ,χW ⟩= 1 is equivalent to the following: if one defines bm by
�
∑
m∈Zam e i mθ
�
�
e iθ− e−iθ�
=∑
m∈Zbm e i mθ,
then∑
b 2m = 2, and this expression is odd in θ (determined by switching θ and−θ).24 But rθ ∼ r−θ, so this shouldn’t
change anything, so in particular one can only have the formula (12.2), and then check that they’re irreducible, as wedid.
What happens to SO3. The irreducible representations of SO3 correspond bijectively to those of SU2 on which −Iacts trivially, which is shown by pushing representations back and forth across π : SU2→ SO3, whose kernel is {±I }.−I acts on Vn by (−1)n , so the Vn for n even descend to SO3, giving an (n+ 1)-dimensional representation withcharacter
χVn(ϕ) = e i(−n/2)ϕ + e i(−n/2+1)ϕ + · · ·+ e i(n/2)ϕ ,
where ϕ is the rotation angle in SO3; the factor of two is because π(rθ) is a rotation by the angle 2θ. Thus, SO3 has aunique irreducible representation of each odd dimension. This is cool, but it would certainly be nice to have a moredirect visualization — this ends up being the theory of spherical harmonics, which will provide an explicit model forthese irreducibles.
Let Pn be the space of homogeneous,C-valued25 polynomials onR3 of dimension n, so that P0 = ⟨1⟩, P1 = ⟨x, y, z⟩,P2 = ⟨x2, y2, z2, xy, y z, x z⟩, and so forth. The dimensions are 1,3,6,10, . . . thus, these aren’t irreducible for n ≥ 2, asall of the irreducibles were shown to have odd dimension. However, we can still extract the irreducibles.
Let rotϕ =
cosϕ − sinϕsinϕ cosϕ
1
denote rotation by the angle ϕ about the z-axis, so that
χP1(rotϕ) = 2cosϕ+ 1= e iϕ + e−iϕ + 1.
Computing higher χPnin this basis is unpleasant, so change coordinates to e1+ i e2, e1− i e2, and e3, so that rotation
acts as the diagonal matrix given by (e iϕ , e−ϕ , 1). In this basis,
P2 = ⟨(x + i y)2, (x − i y)2, z2, (x + i y)(x − i y), (x + i y)z, (x − i y)z⟩,so rotϕ acts diagonally, via the matrix
e2iϕ
e−2iϕ
11
e iϕ
e−iϕ
.
Thus, the character becomesχP2(rotϕ) = e2iϕ + e−2iϕ + 2+ e−iϕ + e iϕ .
This looks almost like an irreducible character, but with a 2 instead of a 1, so P2 must be the direct sum of a five-dimensional irreducible representation and a one-dimensional irreducible representation. x2+ y2+ z2 is invariantunder rotation, so one way to think of the five-dimensional representation is as the quotient of P2 by (x2+ y2+ z2).Alternatively, it’s the kernel of the Laplacian∆= ∂x x + ∂yy + ∂z z (i.e. things that are rotation-invariant), given bythings of the form
{ax2+ b y2+ c z2+ · · · | a+ b + c = 0}.In general, after computing characters, Pn = Pn−2⊕Hn , where Hn is a (2n+1)-dimensional irreducible representation,called the “harmonic polynomials,” and there are corresponding maps Pn−2 → Pn given by multiplication by(x2+ y2+ z2) and Pn→ Pn−2 given by taking the Laplacian. However, these maps aren’t inverses.
24This argument might look a little cloudy, but we’ll see it again in a more general case later on in the course, where it will be given a moreproper proof.
25Everything in the study of complex representations is also complex: vector spaces are over C, spans are C-valued, and so on.27

This creates two realizations of the (2n+ 1)-dimensional irreducible representation of SO3: as Pn/Pn−2 (whichisn’t used very often) or as ker(∆) on Pn .26
One interesting consequence is that, as Hilbert spaces,
L2(S2) =d⊕
nHn |S2 ,
and Hn |S2 is the eigenspace for ∆S2 .27 Hn |S2 is known as the space of spherical harmonics, and there’s plenty ofclassical literature about it.
It’s also possible to start with S2 and use this to develop the irreducible representations, but this means one has tothink about spherical coordinates.
13. REPRESENTATIONS OF LIE ALGEBRAS: 4/28/14
Last time we discussed representations of SU2 and SO3: we saw that for every n ≥ 0, there’s a unique irreduciblerepresentation of SU2 with dimension n+ 1 and character
�
e iθ 00 e−iθ
�
7−→ e i nθ+ e i(n−2)θ+ · · ·+ e−i nθ.
This is realized on homogeneous polynomials on C2 of degree n.Thus, for every even n ≥ 0, there’s a unique irreducible representation of SO3 with character
rotϕ 7−→ e i nϕ/2+ e i(n−1)ϕ/2+ · · ·+ e−i nϕ/2.
This is because there’s a map SU2 → SO3 sending�
e iθ 00 e−iθ
�
7→ rot(2θ), and the representations thus induced arerealized on the space of harmonic polynomials on R3 of degree n/2 (i.e. those killed by the Euclidean Laplacian∆= ∂x x + ∂yy + ∂z z ).
In this lecture, we turn to a Lie-algebraic perspective, which is useful because many proofs in the general caseinvolve embedding SU2 into some other compact Lie group.
Recall that all representations are taken to be continuous (and therefore smooth) into some GLN (C). If V =CN is arepresentation of SU2, then there’s a map ρ : SU2→GLN (C), which can be differentiated into a map dρ : Lie(SU2)→MN (C) of Lie algebras, sending X 7→ d
dt ρ(etX ). dρ is real linear, and therefore can be extended into a complex linear
dρC : Lie(SU2)⊗C︸ ︷︷ ︸
Lie(SL2(C))
→MN (C).
This is because after differentiating the conditions for SU2, one has that
Lie(SU2) =n
X ∈M2(C) |X +XT= 0, tr(X ) = 0
o
=§�
i t a+ i b−a+ i b −i t
�
| a, b , t ∈Rª
,
which is a three-dimensional vector space, but
Lie(SL2(C)) = {X ∈M2(C) | tr(X ) = 0}
=§�
t αβ −t
�
| t ,α,β ∈Cª
.
This is three-dimensional over C, so any real basis for Lie(SU2) is a complex basis for Lie(SL2(C)), so Lie(SU2)⊗C=Lie(SL2(C)).
Both dρ and dρC respect the Lie algebra structure, i.e. they commute with the Lie bracket. In fact, ρ also extendsto a representation ρC : SL2(C)→GLN (C), and we can regard dρC as its derivative. The argument can be by checkingthat differentiating and complexifying in either order produce the correct result, or noticing that the irreduciblerepresentations can be acted on in this way, and thus all of them can.
26To use this, it’s necessary to check that the Laplacian is in fact surjective.27The hat on top of the direct sum indicates the completed direct sum, i.e. taking the direct sum and then completing the corresponding space.
28

Now, one can compute dρC for irreducible representations. A convenient basis for Lie(SL2(C)) is
h =�
1 00 −1
�
e =�
0 10 0
�
, f =�
0 01 0
�
. (13.1)
These names are standard.We’ll compute how dρC acts on h, e , and f . Then, an R-basis for Lie(SU2) is given by ⟨i h, i (e + f ), i (e − f )⟩, so
one can get information about the representations.Let Vn be the representation on homogeneous polynomials of degree n: if P ∈Vn and g ∈ SU2, then g P (gx) = P (x)
for x ∈C2. A basis for Vn is given by xn , xn−1y, xn−2y2, . . . , yn , so we’ll compute how each of these is acted upon.The action in question is
�
a bc d
�
· x i y j = (d x − b y)i (−c x + ay) j ;
This is clearer as a right action, but in general it’s more confusing to mix left and right actions in the same place. Thus,
(dρC(h)) · (xi y j ) =
ddtρC (exp(t h)) · (x i y j )
�
�
�
�
t=0
=ddt
�
e t 00 e−t
�
x i y j�
�
�
�
t=0
=ddt
e t ( j−i)(x i y j )|t=0
�
�
�
�
t=0
= ( j − i)x i y j ,
which is where (n− 2i ) comes from: in this basis, the x i y j are eigenvectors, with eigenvalues j − i , corresponding ton, n− 2, . . . ,−n+ 2,−n. Remember, though, h 6∈ Lie(SU2), just in Lie(SL2(C)).
Since f is nilpotent, its exponential is really simple:
dρC( f )(xi y j ) =
ddtρC(exp(t f ))(x i y j )
�
�
�
�
t=0
=ddt
�
1 0t 1
�
x i y j�
�
�
�
t=0
=ddt
x i (−t x + y) j�
�
�
�
t=0
=− j x i+1y j−1.
dρC( f )maps each basis element to a multiple of the one before it, and e is essentially the same, but in the oppositedirection. There’s some scalar factor which doesn’t end up mattering.28
0 xn
f}}
e77
h−n
ZZ xn−1y
fyy
e
99h
2−n
WW· · ·
fuu
e77xyn−1
f
{{
e
99h
n−2
WWyn
fuu
e
==hn
WW0 (13.2)
This is the Lie algebra structure. The basis elements satisfy the relations [h, e] = 2e , [h, f ] = 2 f , and [e , f ] = h(which you can check at home), and this is also true of their derivatives, so if one goes there and back again, it’spossible to calculate the difference (e.g. e ◦ f versus f ◦ e , the difference is by h).
We could have also used this to check irreducibility: if U ⊆V were invariant under SU2, then it’s also invariantunder Lie(SU2) and thus under Lie(SU2)⊗C (since that just throws in complex scalars). Thus, U is invariant underdρCe , dρC f , and dρCh. Looking at the eigenspaces of h in particular, x i y j ∈ U for some i and j (as long as U isnonzero), so by using e and f , this means all of them are in U , and thus U =Vn .
Since SU2 is simply connected, then we know that every representation of Lie algebras (i.e. a Lie algebra homo-morphism Lie(SU2)→Mn(C), sort of a differentiated analogue of a group representation) must arise as the derivativeof a representation of SU2, and (nontrivial to prove) must be a sum of the irreducible representations shown.
28Except, of course, in positive characteristic. . .29

Note that the commutation relations for h, e , and f force the following: if hv = av , then v ′ = e v has the propertythat hv ′ = (a+ 2)v ′, and v ′′ = f v has hv ′′ = (a− 2)v ′′. Thus, e is sometimes called the raising operator, as it raisesthe eigenvalue for h, and f is correspondingly called the lowering operator.
Looking Forward. We saw that in SU2, everything is conjugate to a matrix of the form rθ =�
e iθ 00 e−iθ
�
, which isalso conjugate to r−θ, and the irreducible representations are parameterized by n ≥ 0 in Z with an explicit characterformula. There was also an integration formula for class functions,
∫
SU2
f =2π
∫
θ
f (rθ) sinθdθ,
where the left side of the equation is integrated with respect to the Haar measure.We also looked at Un , in which everything is conjugate to a matrix of the form
r (θ1, . . . ,θn) =
e iθ1
. . .e iθn
,
so the eigenvalues are determined up to permutation; for any σ ∈ Sn , r (θ1, . . . ,θn)∼ r (θσ(1), . . . ,θσ(n)). Then, theirreducible representations are parameterized by n-tuples of integers k1 ≥ k2 ≥ · · · ≥ kn , and the integration formulais
∫
Un
f =∫
(θ1,...,θn )
f (r (θ1, . . . ,θn))|∏
j<k
�
e iθ j − e iθk�
|dθ.
These both can be generalized: suppose G is a compact, connected Lie group, such a Un , SOn , or (S1)n . There’s anotion of a torus within G, a compact, connected, abelian Lie subgroup, which thus must be isomorphic to (S1)n ,buy a proof found in the textbook.29 Then, a maximal torus is a closed subgroup of G that is a torus and maximalwith respect to these properties. It turns out that all maximal tori are conjugate, and that everything in G is conjugateto something in the maximal torus. Specifically, if W =Normalizer(T )/T , then t ∈ T ∼ w(t ) for w ∈W .
In Un , W = Sn ; in SU2, W = Z/2. W is a finite group acting on T , so the irreducible representations of Gcorrespond to those of T , quotiented by W (i.e. taking W -orbits), and the irreducible representations of T are easyto discover, since it is abelian.
Another important fact is that G is almost determined by (T ,W ), in a sense that will be clarified. G is in fact fullydetermined by the normalizer of T , but this isn’t useful.
Thus, the main players in the rest of the game are the torus and the finite group that acts on it.
14. MAXIMAL TORI AND WEYL GROUPS: 4/30/14
Definition 14.1. A torus is a connected abelian compact Lie group (and therefore isomorphic to (S1)n). In any Liegroup G, a closed subgroup T ⊂G is called a maximal torus if it isn’t contained in any other torus.
For the rest of the course, G will denote a compact, connected Lie group.For an example, if G =Un , then the maximal torus is the subgroup of diagonal matrices.
Claim. Every element of G is be conjugate to an element of the maximal torus T .
This fact will imply that all maximal tori of a given Lie group are conjugate; in Un , this says that all matrices arediagonal in their own eigenbases.
The Weyl group W is defined as W = (Normalizer(T ))/T . In the case of Un , W = Sn , since the normalizer of Tconsists of all permutations of elements of T .
For orthogonal groups, however, the parity of the dimension matters.• In SO2n , the maximal torus is given by elements with the block form
rotθ1. . .
rotθn
,
29But we can already see that, since exp is a global homomorphism in this case, any torus must be a quotient of Rn .30

where rotα=�
cosα sinα− sinα cosα
�
. Thus, T consists of n copies of S1; it’s clear that this is a torus, but not yet
that it’s maximal; soon, this will be much easier to check.The Weyl group can permute these blocks, and since rotθ ∈O(2), then O(2)n normalizes T , and is in fact
O(2) · Sn . Thus, the Weyl group is (O(2)n · Sn)det=1, which is finite with size 2n−1n!
• In SO2n+1, the setup is very similar, but not the same: T consists of elements of the form
rotθ1. . .
rotθn1
,
so that T is n copies of S1 again, and the Weyl group is W =O(2)n · Sn/SO2n+1, which has size 2n n!If T is a torus, let X ∗(T ) denote the set of its irreducible representations.30 If T = (S1)n , then it’s abelian, so all of theirreducible representations are one-dimensional, and thus X ∗(T ) ∼→Zn , given by
(m1, . . . , mn) 7−→�
(θ1, . . . ,θn) 7−→ e i∑
j θ j m j�
.
Thus, X ∗(T )∼=Zdim(T ).
Claim. Irreducible representations of G are parameterized by W -orbits on X ∗(T ) (sometimes written X ∗(T )/W orX ∗/W ), and there is an explicit character formula.
For example, in the case of Un , Zn/Sn↔{k1 ≥ k2 ≥ · · · ≥ kn}, which is how the irreducible representations havebeen parameterized in class thus far. The general proof will be very similar to the case for Un , once we prove theintegration formula.
Proposition 14.2. The pair (W ,T ) almost determine G.
It’s completely equivalent to think of this as (W ,X ∗(T )), a finite group acting on a Lie group. In some cases, thetori are abstractly isomorphic, but the action of W is different.
Definition 14.3. A group A acting on a vector space V is called a reflection group if it is generated by reflections, i.e.r ∈A such that r 2 = 1 and r fixes a subspace of codimension 1 (so that there’s a basis for V in which r is diagonal,with diagonal entries only 1 and exactly one −1).
Claim. W acting on X ∗⊗R is a reflection group.
We will eventually prove this by embedding SU(2)→G, putting reflections inside G.This is a very restrictive notion, because it’s very hard to have a finite reflection group,31 and turns the classification
of compact Lie groups into a question of combinatorial geometry. Thus, one can classify all of the finite reflectiongroups arising from a compact Lie group G.
In the end, this will lead to a classification of compact Lie groups themselves, into S1, Un and SUn , SO2n andSO2n+1, symplectic groups, and five exceptional groups, as well as products of these groups.
In Un , W acting on X ∗ looks like Sn Zn by coordinate permutations, and is generated by transpositions (whichcan be thought of as the reflection through the hyperplane “between” the i - and j -axes), so it’s a reflection group. InSO2n+1, the action of Sn · {±1}n Zn can act by coordinate permutation (the Sn bit) and changing signs (the otherpart), so there are more reflections, e.g. xi ↔ x j , xi ↔−xi , and xi ↔−x j . One can check that these generate thegroup.
What does “almost” mean in Proposition 14.2? Here’s a simple example of its failure: SU(2) and SO(3), given bymaximal tori of the form
�
e iθ 00 e−iθ
�
and�
rotθ 00 1
�
respectively, but in both cases have Weyl group Z/2. Thus, for both,X ∗(T )∼=Z, and W acts by m 7→ −m.
The map SU2 → SO3 sending rθ 7→ rot2θ wraps the torus upstairs twice around the one downstairs, and wewould like some way to distinguish these.
Definition 14.4. Let T act on Lie(G) by the adjoint action; then, a root of T is a nonzero character χ ∈X ∗(T ) thatoccurs in Lie(G)⊗C. Then, Φ⊆X ∗(T ) denotes the set of roots.
30This notation comes from algebraic geometry, since this set is contravariant in T .31What tends to happen is that two reflections generate an infinite number of elements, unless their angle is a rational multiple of π.
31

This will enable us to state the following much better result.
Claim. (W ,X ∗,Φ) determine G up to isomorphism. Moreover, W acting on X ∗ is a finite reflection group generatedby reflections through the roots (i.e. there’s a one-to-one correspondence): for each reflection r there’s a unique (upto sign) root α in the −1-eigenspace.
In some sense, roots parameterize reflections, so it’s possible to classify systems of the form (W ,X ∗,Φ) as a meansto understanding Lie groups.
In Un , the roots are the characters
e iθ1
. . .e iθn
7−→ e i(θ j−θk ),
corresponding to (0,0, . . . , 0, 1, 0, . . . , 0,−1,0, . . . , 0), with a 1 in the j th place and a −1 in the k th place; geometrically,these correspond to reflections.32 We can actually prove this right here: the adjoint of the maximal torus T ofdiagonal matrices with entries of the form e iθ j on Lie(Un)⊗C=Mn(C) is Ad(t ) : X 7→ tX t−1, for X ∈Mn(C), sox j k 7→ e iθ j e−iθk x j k . Thus, the ( j , k)th entry is multiplied by e i(θ j−θk ), and these are exactly the roots.
In SO2n , the roots can be written in Zn (instead of X ∗(T )) as (0, . . . , 0,±1,0, . . . , 0,±1,0, . . . , 0), with the ±1 in thej th and k th slots, or just (0, . . . , 0,±1,0, . . . , 0), in just a single entry. These embody three kinds of reflections, thoughexactly how depends on sign. The roots refine the reflection.
The notion of a root feels pretty strange, e.g. there’s no multiplicities. But they index reflections geometrically, sothey’re actually pretty natural.
Proposition 14.5. All maximal tori of a given compact Lie group G are conjugate; thus, the maximal torus T of G isunique up to conjugacy.
Proof. Fix T ⊆ G a maximal torus, so that any g ∈ G is conjugate to an element of T , so thus any two tori areconjugate. But why does this follow? In the classical, explicit case, one can pick eigenvectors, but this isn’t true ingeneral. The following trick is useful beyond the scope of this proof.
Let T ′ be another maximal torus, and find a t ′ ∈ T ′ such that ⟨t ′⟩= T ′ (i.e. Z(t ′) = T ′). This can be done becauseT = (S1)n , so one can choose entries in these components that are linearly independent overQ and show that theyhave this property. This is known as a “generic element” of T ′.
By assumption (everything in G is conjugate to something in T ), there’s a g ∈G such that g t ′ g−1 ∈ T , and thusgT ′ g−1 ⊆ T . But my maximality, this forces gT ′ g−1 = T . �
15. CONJUGACY OF MAXIMAL TORI: 5/2/14
Today, G is a compact connected Lie group and T ⊂G its maximal torus. Let W =N (T )/T be its Weyl groupand X ∗(T ) be the set of irreducible representations of T , which is a free abelian group. Since all of the irreduciblerepresentations of T are one-dimensional, they can be identified with their characters, and thus the roots Φ⊂X ∗(T ).These are the characters occurring in Lie(G)⊗C. Then, we aim to prove the following:
• the irreducible representations of G correspond to X ∗/W ,• (W ,X ∗) is a reflection group, and• (W ,X ∗,Φ) completely determines G.
For example, for Un , T is the subgroup of diagonal matrices with diagonal entries e iθ j as usual, and W = Sn , actingon X ∗(T )∼=Zn ; the roots have the form ei ± e j when i 6= j .
There’s an exceptional Lie group called G2, which is 14-dimensional, but has a two-dimensional maximal torus T .Then, W =D12 (the symmetries of the hexagon) and X ∗ ∼=Z2. The roots, of which there are twelve, are plotted inFigure 2.
Similarly to how SOn is the stabilizer of a symmetric bilinear form, Spn (the symplectic group) is the stabilizer foran alternating bilinear form.33
32The reflection through a vector is understood as the reflection through its normal hyperplane.33Note that we don’t look at stabilizers for higher-order forms because they’re often trivial. For example, the space of alternating trilinear
forms on Rn has dimension�n
3
�
, but GLn (R) acts on this, and has dimension n2. Speaking not rigorously, one would expect there to be a stabilizerif�n
3
�
≤ n2, but this is only true when n ≤ 8, and there is a nontrivial stabilizer in these cases. When n = 8, one gets SU3∼= SL3(R), and when n = 6,
32

FIGURE 2. A depiction of the root system of the exceptional Lie group G2. Source: http://en.wikipedia.org/wiki/G2_(mathematics).
Last time, we proved that any two maximal tori of G are conjugate, and it’s also true (albeit a stronger fact) thatany g ∈G is conjugate to an element of a given maximal torus, but that will be explained later. However, to finishthe proof, we need to understand why, if t is a generic element of a maximal torus T ′ and T is another maximal torus,then there’s a g ∈G such that g t ′ g−1 ∈ T . This will be a Lie algebra argument, setting the stage for what comes later.
Choose a generic t ′ ∈ T ′, i.e. ⟨t ′⟩ = T ′ (in some sense, it needs to be irrational enough). Thus, t ′ = exp(X ′)for some X ′ ∈ Lie(T ′)/We’ll show that there exists a g ∈G such that Ad(g )X ′ ∈ Lie(T ); then, by exponentiating,g t ′ g−1 ∈ T , so gT ′ g−1 ⊆ T , and thus they are equal, by the maximality of T .
Fix an inner product ⟨, ⟩ on Lie(G) invariant by Ad; for example, when G =Un , Lie(G)⊆ Mn(C), and a viableinner product is
⟨A,B⟩=n∑
i , j=1
Ai j Bi j .
In the general case, such an inner product exists because G is compact, so it’s possible to average. Then, choose at ∈ T such that ⟨t ⟩= T , and let X ∈ Lie(T ) such that exp(X ) = t . Then, choose a g ∈G that minimizes the distancefrom Ad(g )X ′ to X under this inner product. That is, we’re trying to minimize
Ad(g )X ′−X
2 = ⟨Ad(g )X ′−X ,Ad(g )X ′−X ⟩
=
X ′
2+ ‖X ‖2− 2⟨Ad(g )X ′,X ⟩,
since the inner product is Ad-invariant. Thus, the goal is to maximize ⟨Ad(g )X ′,X ⟩. A maximum exists by compact-ness, so assume it’s attained at g = e , by replacing X ′ with Ad(g )X ′ (so that its derivative at e is zero). Eventually, thiswill imply that X ′ ∈ Lie(T ), but this requires some explanation: basically, if this is conjugate, so was the original X ′.
What is the derivative of this? We saw that ddY ad(g )X = [X ,Y ], so for all Y ∈ Lie(G),
⟨[Y,X ],X ′⟩= 0, (15.1)
The invariance of the inner product means that ⟨Ad(g )X1,Ad(g )X2⟩= ⟨X1,X2⟩, so after differentiating with respectto g , one obtains
⟨[Y,X1],X2⟩+ ⟨X1, [Y,X2]⟩= 0, (15.2)
i.e. ad(Y ) is skew-symmetric. Thus, one can apply it to (15.1) to show that ⟨X ′, [Y,X ]⟩= 0 for all Y ∈ Lie(G). (15.2)also implies that ad(Y ) has imaginary eigenvalues, which we’ll use later.
it’s another classical group. But when n = 7, it’s not a classical group, and is actually G2. If one does this instead for symmetric “definite” forms, onegets groups called SOp,q , which are noncompact and therefore out of the scope of this class. Lie(SOp,q ) 6= Lie(SOn), but their complexificationsare the same.
33

Geometrically, X ′ ⊥ [X ,Y ] for all Y ∈ Lie(G), which forces it to also be perpendicular to the space L spanned by[Y,X ] for all Y . But ⟨exp(X )⟩= T , and we want to show that X (∈)Lie(T ) as well. We’ll break this down into twoparts.
Proposition 15.3.
(1) dim(L) = dim(G)− dim(T ).(2) Then, L⊥ Lie(T ).
Once these two pieces fall into place, then L= (Lie(T ))⊥, so X ′ ⊥ L and thus X ′ ∈ Lie(T ).
Proof of Prop 15.3. For (1), it’s enough to show that dim{Y | [Y,X ] = 0} = dimT , since this is the null space of[–,X ]. This, however, is the space of things that commute with X , which is Lie(T ), because if [Y,X ] = 0, thenexp(T Y ) commutes with exp(tX ) and thus also with T ; then, the statement follows by the maximality of T .
For (2), we wish to show that ⟨[Y,X ],Lie(T )⟩= 0; since the Lie bracket is skew-symmetric, then this becomes⟨−[X ,Y ],Lie(T )⟩= ⟨Y, [X ,Lie(T )]⟩, which is 0 because Lie(T ) is abelian, �
Thus, the proof of the conjugacy of maximal tori follows. It’s a bit involved, but (15.2) comes up in other proofs.The next thing we’ll address is this business about the Weyl group W being a reflection group, generated by
reflections (that is, in its action on X ∗, or on the corresponding vector space X ∗⊗R) by reflections sα correspondingto roots α ∈ Φ.
Given an inner product space (H , ⟨, ⟩) and a vector x ∈H , we can define the reflection through x to be the reflectionthrough the hyperplane x⊥ that negates x, i.e.
rx (w) = w −2⟨w, x⟩⟨x, x⟩
x.
Thus, this acts as the identity on x⊥, but sends x 7→ −x.The inner product on Lie(G) gives an inner product on everything else. In particular, it induces one on X ∗⊗R,
so defines the reflections that negate the roots α. Any G-invariant inner product will do, though.Since Lie(T ) ⊆ Lie(G), then the inner product on Lie(G) induces one on Lie(T ), and since X ∗(T ) is the set of
characters T → C∗, then the map χ 7→ (1/i)dχ identifies X ∗ ⊗R ∼→ Lie(T )∗ (the dual space Hom(Lie(T ),R)),because dχ is purely imaginary. Thus, the inner product on Lie(T ) induces one on Lie(T )∗ as normally, and thus onX ∗⊗R.
Now, we want to produce a reflection sα ∈W for each root α ∈ Φ. We’ll actually do much more, making ahomomorphism ια : SU(2)→G, and then build the reflections as
ια
�
0 1−1 0
�
7−→ sα.
The abstract proof will be given next time, but until then, here is an example in the case G = U3. The roots areα= (1,−1,0), (−1,1,0), β= (1,0,−1), (−1,0,1), γ = (0,1,−1), and (0,−1,1). They sit inside Z3 naturally identifiedwith the character group of the torus, X ∗(e iθ1 , e iθ2 , e iθ3), so
ια
�
a b−b a
�
=
a b 0−b a 0
0 0 1
ιβ
�
a b−b a
�
=
a 0 b0 1 0−b 0 a
ιγ
�
a b−b a
�
=
1 0 00 a b0 −b a
.
Thus, we can use what we already know about SU(2) to learn things about the representations of other Lie groups.34

16. PRODUCING ENOUGH REFLECTIONS: 5/5/14
Once again, let G be a connected, compact Lie group with maximal torus T . Let X ∗(T ) be its character group,acted on by W =N (T )/T , the Weyl group. The roots Φ⊆X ∗(T ) are the chracters that occur in the adjoint actionof Lie(G)⊗C. Then, (X ∗,W ,Φ) will determine G, and so forth.
Today, though, we’ll continue showing that (X ∗,W ) is a reflection group by producing enough reflections toclassify it.
Take, as last time,a G-invariant inner product on Lie(G), which induces a G-invariant inner product on Lie(T ),and thus also X ∗(T )⊗R ∼→ Lie(T )∗ sending χ 7→ (1/i)dχ . This space of real functionals on T also gets an innerproduct.
Today, we’ll show that for every root α, the reflection through the hyperplane orthogonal to α, i.e.
sα(v) = v −2⟨v,α⟩⟨α,α⟩
α ∈W .
Formally, sα is a reflection of the real vector space X ∗(T )⊗R (i.e. an automorphism), so we really mean that there’san element of W inducing it; then, uniqueness of that element follows straightforwardly. In fact, the representationW →Aut(X ∗⊗R) is faithful, so each w ∈W is determine by its action on X ∗. This representation is given as follows:if χ ∈X ∗, t ∈ T , and w ∈W , then w · t = w t w−1, and (w ·χ )(w · t ) = χ (t ), so that w ·χ (t ) = χ (w−1 t ).
For example, if G =Un , then T =
(
e iθ1
...e iθn
!)
as usual, so the character group is X ∗ ∼=Zn via
(m1, . . . , mn)↔ e i∑
m jθ j = χ .
The Lie algebra of T is Lie(T ) =
( ia1
...ian
!)
, so
dχ :
ia1. . .
ian
7−→ i
n∑
j=1
m j a j
is an imaginary-valued functional, so when one divides it by i , it becomes real-valued, and Zn ⊗R gives the full Rn offunctionals.
Constructing the Un -invariant inner product shows that on X ∗⊗R,
‖(m1, . . . , mn)‖∝∑
m2j ,
where we don’t really care about the constant of proportionality, since this is only used to define orthogonality forreflections.
The roots of Un are ei − e j ∈Zn , where e1, . . . , en is the standard basis, and thus sei−e jswaps ei and e j and leaves
everything else fixed. They Weyl group is isomorphic to Sn , and with this context, dei−e jis just the transposition
(i j ).There are very few reflection groups in the world, so this is the crucial step in the classification of compact Lie
groups.
Lemma 16.1. Write g= Lie(G)⊗C, and for any character χ ∈X ∗(T ), write gχ for the X ∗-eigenspace, i.e.
gχ = {X ∈ g |Ad(t )X = χ (t )X },
so that gχ 6= 0 iff χ ∈ Φ∪{0}. Then,(1) g0 = Lie(T )⊗C,(2) gα = g−α, and(3) [gα,gβ]⊆ gα+β.
The proof of this lemma will mostly be a matter of definition checking.In the case of Un and α = ei − e j , let Ai , j be the matrix with a 1 in the (i , j )th position and 0 elsewhere. Then,
gα =C ·Ai , j .34
34In general, these spaces will be one-dimensional, but we haven’t proven that yet.35

Proof of Lemma 16.1.
• For (1), clearly Lie(T ) ⊆ g0, since g0 is the set of things in g that commute with T , and equality is bymaximality of T (if not, one can use exp to pass back and forth and find a contradiction).• For (2), an element of g is of the form X + iY for X ,Y ∈ Lie(G), so the conjugate is X + iY =X − iY .35 If
a ∈ Lie(G), the real Lie algebra, then it’s conjugate with itself.For example, if G =Un ,
�
0 10 0
�
=12
�
0 1−1 0
�
− i2
�
0 i−i 0
�
,
and both of the matrices on the right are in Lie(Un). Thus, the conjugate switches them, so one obtains ( 0 01 0 ).
Returning to the proof, suppose that X ∈ gα, so that Ad(T )X = α(t )X for any t ∈ T . Let’s conjugatethat:
Ad(T )X = α(t )X
= α(t )−1X ,
because α is a character of a compact group, so α−1 = α. This is akin to the unit circle. Then,
=⇒ Ad(t )X = α(t )−1X ,
because Ad commutes with conjugation. Thus, X ∈ gα−1 .• For (3), take X ∈ gα and Y ∈ gβ. Conjugation respects the Lie bracket, so
Ad(t )[X ,Y ] = [Ad(t )X ,Ad(t )Y ]= [α(t )X ,α(t )Y ]= αβ(t )[X ,Y ].
Note that αβ isn’t always a root, but gαβ still makes sense. �
Recall that by differentiating the condition on the invariant inner product of G, one obtains the skew-symmetricproperty (15.2), and thus that ad(X ) acts as a skew-symmetric transform. Also, recall that Lie(SL2(C)) is the complexspan ⟨h, e , f ⟩, where h, e , and f are given in (13.1); specifically, that [h, e] =−2e , [h, f ] =−2 f , and [e , f ] = h.
Proposition 16.2. Let α be a root and X ∈ gα be nonzero. Then, there exists a map ια : SU(2)→G, and therefore alsoits derivative dια : Lie(SU2)→ Lie(G) and its complexification Lie(SL2(C))→ g= Lie(G)⊗C such that:
�
0 11 0
�
7−→ λX�
0 01 0
�
7−→−λX
for some λ 6= 0, and such that ια(SU2) commutes with ker(α)⊂ T .
This gα is called the root space, and once this proposition is proven,
sα = ια�
0 1−1 0
�
ends up being the desired reflection.For example, when G =U3 and α= e1− e3, the map will send SU(2) into U3 via the first and third entries:
�
a b−b a
�
7−→
a 0 b0 1 0−b 0 a
.
35Be warned: this is not the standard conjugation operation when G is a complex matrix group.36

Proof of Proposition 16.2. We’ll construct the maps in reverse order; since SU2 is simply connected, we can pull dιαup to ια.
To give Lie(SL2(C))→ g, we need to product h ′, e ′, f ′ ∈ g such that [h ′, e ′] = 2e ′, [h ′, f ′] = 2 f ′, and [e ′, f ′] = h ′.Then, we can send e 7→ e ′, f 7→ f ′, and h 7→ h ′. We’ll set e ′ =X and f ′ =−X , so that h ′ =−[X ,X ] is forced. Now,we have to check the commutator relations.
We know Ad(t )e ′ = α(t )e ′, so for Y ∈ Lie(T ), we ca differentiate in the Y -direction. Thus, for α ∈ (Lie(T ))∗,ad(Y )e ′ = iα(Y )e ′, and therefore [Y, e ′] = iα(Y )e ′.
Since X ∈ gα and X ∈ gα, then h ′ ∈ g0 = Lie(T )C. Thus, [h ′, e ′] = iα(h ′)e ′, and similarly, [h ′, f ′] =−iα(h ′) f ′, soit’s enough to show that α(h ′) is a positive real divided by i . In particular, it is possible to scale X and X accordinglyso that these brackets go to 2 (this is where λ comes from). This is the only thing we need to check, so in some sense,there are no choices!
Note that h =−[X ,X ] =−h ′, so h ′/i ∈ Lie(G), and thus α(h ′/i ) ∈R, so we just need to check that it’s negative.We’ll show that it’s nonzero, but a more careful analysis of the signs in the same line of reasoning will prove that it isin fact negative.
If h ′ = 0, then X and X commute with each other, and also with ker(α) (since they act by ±α), so one obtain atorus of dimension at least dim(ker(α))+2= dim(T )+1. This argument is a little tricky because of complexification,but one can pick elements that span the same real vector space.
So we’ve shown that [X ,X ] 6= 0, but we want α([X ,X ]) to be nonzero. Divide by i , so that we’re in the realLie algebra. In Lie(T ), (1/i)[X ,X ] is in the α-direction, i.e., if we use the inner product to identify Lie(T ) with(Lie(T ))∗, then this lies parallel to α. We’ll verify this next time, though; stay tuned.
17. MAPPING SU2 INTO COMPACT LIE GROUPS: 5/7/14
As usual, let G denote a compact, connected Lie group, T ⊂ G be its maximal torus, X ∗(T ) be its group ofcharacters, and W =N (T )/T .
Last time, we were showing that if g = Lie(G)C and gα = {v ∈ G | Ad(t )v = α(t )v} for roots α ∈ Φ, then ifX ∈ gα \ 0, then there’s a homomorphism ια : SU(2)→G such that dια sends
�
0 10 0
�
7−→ λ1X and�
0 01 0
�
7−→ λ2X ,
for λ1,λ2 6= 0. These matrices lie in Lie(SU2))C = Lie(SL2(C)).For example, if G =U(3) and α= (−1,0,1), then gα =C
� 0 0 10 0 00 0 0
�
. Then, ker(α) is the things killed by its action:
ker(α) =
z1 0 00 z2 00 0 z1
,
so
ια :�
a b−b a
�
7−→
a 0 b0 a 0−b 0 a
.
Last time, we constructed a map Lie(SL2(C))→ g such that ( 0 10 0 ) 7→ e ′, which is a multiple of X ; ( 0 0
1 0 ) 7→ f ′, a multipleof X , and
�
1 00 −1
�
7→ h ′ = [e ′, f ′]∝ [X ,X ]. But it still remains to see why α(h ′) 6= 0, so that these multiples are
nonzero. We showed that h ′ 6= 0, but since h ′∝ [X ,X ] and h ′ =−h ′, then h ′ must be imaginary, and can be writtenas h ′ = i H for some H ∈ Lie(G). Since h ′ 6= 0, then H 6= 0 too.
What needs to still be shown is that H lies in the direction ofα, i.e. that H ⊥ ker(α)⊆ Lie(T ), or that H ∈ (Lie(T ))∗is proportional to α (the identification between Lie(T ) and its dual made via the invariant inner product).
Take Y ∈ ker(α)⊆ Lie(T ); this is somewhat sloppy notation, as we’ve used α both as the character T →C∗, andalso its derivative Lie(T )→R. Then, the goal is to show that Y ⊥ H . Well, H ∝ [X +X , (X −X )/i], then sinceY ∈ ker(α), then Y (X +X ) = Y ((X −X )/i) = 0. Thus, what we want follows from the invariance of the innerproduct:
®
Y,
�
X +X ,X −X
i
�¸
=−¬
[X +X ,Y ], · · ·¶
= 0.
37

For example, in the case U3 as before, H =
i 0 00 0 00 0 −i
, so it’s in the same direction as α.
Thus, there’s a Lie algebra homomorphism Lie(SL2(C))→ Lie(G)⊗C. But Lie(SU2)⊆ Lie(SL2(C)) is spanned by§�
0 1−1 0
�
,�
0 ii 0
�
,�
i 00 −i
�ª
,
which are respectively sent to some scalar multiples of {X +X , (X −X )/i , i h ′}. Thus, under this homomorphism,
Lie(SU2)ϕ //
� _
��
Lie(G)� _
��Lie(SL2(C)) // Lie(G)⊗C.
The map constructed above is thus the C-linear extension of ϕ, but since SU2 is simply connected, then ϕ comesfrom some ια : SU2→G.
The textbook uses a different strategy that can be generalized (e.g. to noncompact Lie groups): the goal is for SU2to commute with ker(α)⊂ T , so look at Z(ker(α)): this is a compact Lie group containing ker(α) centrally.
Definition 17.1. The rank of a compact Lie group G is the dimension of its maximal torus.
This notion (which we could have provided several lectures ago) is well-defined because the maximal tori areconjugate.
Thus, Z(ker(α)/ker(α) is a compact group of rank 1, though it might not be connected. However, we know thatthe only compact, connected groups of rank 1 are S1, SU(2), and SO(3) = SU(2)/Z(SU(2)). Thus, excluding S1,there’s a map SU(2)→ Z(ker(α))/ker(α), which lifts (via the Lie algebra) to ια : SU(2)→ Z(ker(α))⊂G.
This makes it clearer where SU(2) comes from: it’s the only interesting group of rank 1, and it’s easy to take rank-1slices of root spaces.
Reflections. With all of these copies of SU2 floating around, it’s possible to say interesting things about reflections.Define
sv : x 7−→ x −2⟨x, v⟩⟨v, v⟩
v
to be the reflection through v⊥, and also define v∨ (“v-check”) as v∨ = 2v/⟨v, v⟩.
Theorem 17.2. For every α ∈ Φ, the element ια�
0 1−1 0
�
normalizes T , and its class sα ∈W acts on Lie(T )∗ as a reflectionthrough α⊥, i.e. ια
�
0 1−1 0
�
= sα, so every β ∈ Φ can be reflected: sα(β) =β−⟨β,α∨⟩α ∈ Φ, and moreover ⟨β,α∨⟩ ∈Z.
It’s also true that these sα generate W , but that’s not immediately important, and we’ll prove it when we get there.The condition that ⟨β,α∨⟩ ∈ Z is actually even more restrictive: it forces cos2θαβ ∈
14Z, severely limiting the
number of possible reflection groups that arise from Lie groups.
Proof of Theorem 17.2. ια�
0 −11 0
�
centralizes ker(α)⊂ T (or ker(α)⊆ Lie(T )), and ια�
0 1−1 0
�
negates H ∈ Lie(T ), as
Ad�
0 1−1 0
���
1 00 −1
��
=−�
1 00 −1
�
,
which is in the α-direction. Thus, since these generate T , then ια�
0 1−1 0
�
normalizes T , so it must act as a reflectionthrough α⊥ on Lie(T )∗.
That sα(β) is a root if β is comes from the fact that W preserves roots.Lastly, to show the integrality of ⟨β,α∨⟩, it happens to be true that ια
� z 00 z−1
�
acts on gβ by the character z 7→ z⟨β,α∨⟩,but this is a character of S1, and thus must be an integer. �
Returning to G = U(3), α = (−1,0,1), and so forth, let β = (1,−1,0), so that α∨ = 2α/⟨α,α⟩ = α, and thus⟨α∨,β⟩= 1, which says that
ια
�
z 00 z−1
�
=
z 0 00 1 00 0 z−1
,
38

and β applied to that is just dividing z by 1, yielding z, which we could have calculated explicitly.At the level of the Lie algebra, the exponent must be proportional to ⟨α,β⟩, because ια centralizes ker(α). To
check which multiple it actually is, compute with β= α ια� z 0
0 z−1
�
acts on gα be z2, so
Ad�
z 00 z−1
��
0 10 0
�
=�
0 z2
0 0
�
,
so the exponent is 2⟨α,β⟩/⟨α,α⟩= ⟨α∨,β⟩ (so that it’s 2 when β= α, giving the action of z2).Thus, not only is ⟨β,α∨⟩ ∈Z, but its specific value indicates how α andβ interact. Again, it’s extremely restrictive:
it means that the projection of β onto Rα is a multiple of α/2. This also holds if one switches α and β, because
⟨α,β∨⟩⟨β,α∨⟩= 4⟨α,β⟩⟨β,β⟩
⟨β,α⟩⟨α,α⟩
≤ 4 (17.3)
by the Cauchy-Schwarz inequality, Thus, ⟨α,β∨⟩ ∈ {−4, . . . , 4} ⊂ Z, and is only ±4 if equality holds in (17.3), i.e.when α and β are proportional. Also, if θαβ is the angle between them, then
cos2θαβ =⟨α,β⟩⟨β,β⟩
⟨α,β⟩⟨α,α⟩
,
so it must lie within 14Z, drastically limiting the number of possible choices:
θαβ ∈ {0◦, 30◦, 45◦, 60◦, 90◦, 120◦, 135◦, 150◦, 180◦}.
This restriction is akin to forcing α to preserve a lattice.
18. CLASSICAL COMPACT GROUPS: 5/9/14
As usual, the dramatis personæ are a compact connected Lie group G, its maximal torus T , the Weyl group W , theirreducible representations X ∗, and the roots Φ.
Last time, we showed that for every α ∈ Φ, there’s a reflection sα ∈W negating α, and ⟨β,α∨⟩ ∈Z for all α,β ∈ Φ.In order to provide basic examples of what we’ve been talking about, consider the classical compact Lie groups:• O(n) is the group of R-linear automorphisms of Rn preserving the form
∑
x2i .
• U(n) is the group of C-linear automorphisms of Cn preserving the Hermitian form∑
xi xi .There’s one more thing that can be added here, given by the quaternions
H= {a+ b i + c j + d k | a, b , c , d ∈R, i j = k , j k = i , ki = j , i2 = j 2k2 =−1}.There are many ways to put C ,→H as rings, but it’s conventional to send a+ b i 7→ a+ b i .
The quaternions have a conjugation, which behaves a lot like that of C:
a+ b i + c j + d k = a− b i − c j − d k .
Thus, there’s a Lie group Sp(2n),36 which is the group of H-linear automorphisms preserving the form∑
xi xi ,where the conjugation is the one just introduced. SinceH isn’t commutative, then it’s necessary to specify that theseautomorphisms be leftH-linear.
These three examples are the basic examples: everything else, even the sporadic groups, will come in some sensefrom them.
As another example of the symplectic group, Sp(2) is the set of f : H → H such that f commutes with leftmultiplication and f (x) f (x) = x x. But if f commutes with left multiplication, then it’s given by right multiplication:f (x) = xq , forcing qq = 1. Thus, Sp(2) ∼= {q ∈ H | qq = 1} ∼= SU(2). These can be thought of as quaternionicmatrices acting on the right.
These three families of groups are all compact because the forms are positive definite on real vector spaces, sothey’re contained within some larger orthgonal group O(2n) or O(4n), which is also compact.
Each of these comes with a standard complex representation: O(n) acts on Rn and thus Cn , U(n) acts on Cn , andSp(2n) acts onHn ∼=C2n .37 These will be called the standard representations. It’s also possible to form these withSO(n) and SU(n), but they’re not as important in this realization.
O(m) and, if m is even, Sp(m) play an important role in real and quaternionic representations.
36Some sources call this group Sp(n), so be careful about the dimension ofHn being used.37The isomorphism as as left C-vector spaces.
39

Proposition 18.1. If G is a compact group and V is an irreducible m-dimensional representation of G, then the followingare equivalent:
(1) χV (g ) ∈R.(2) V ∼=V ∗.(3) V ∼=V .38
(4) G preserves either a symplectic or skew-symmetric bilinear form V ×V →C.(5) G acting on V is conjugate to either a subgroup of O(m) (if it preserves the symmetric form) or Sp(m) (if it
preserves the skew-symmetric form).(6) G acting on V comes from either a representation overR (in the symmetric case), or overH (in the skew-symmetric
case).
This implies that if m is odd, then G must preserve a symmetric form, and thus is conjugate to a subgroup ofO(m) and comes from a real representation.
This large amount of statements can be distilled into saying that if a representation is dual to itself, in the sense of(2) or (3), then it preserves a symmetric or skew-symmetric form, and then so on. Thus, it is possible to think ofquaternionic representations as complex representations that preserve a skew-symmetric form.
For example, D8 and Q8 = {±1,±i ,± j ,±k} ⊆ H× have the same character table and both have a unique two-dimensional representation (the reflections and rotations of the square), and thus are self-dual (since the dual represen-tation must have the same dimension). For D8 it has a symmetric bilinear form, and can be conjugated into O(2),and comes from a real representation. But for Q8, it comes from an H-rep, and can be conjugated into Sp(2), as itpreserve a skew-symmetric form.
This is a standard counterexample to the naïve idea that one could reconstruct a group from its characters, but itturns out that the category of representations of a group G (i.e., along with the data of the morphisms) is enough toreconstruct G.
Proof sketch of Proposition 18.1. If V ∗ is the dual representation of G, then χV ∗ (g ) = χV (g−1) = χV (g ), so if χV ∈R,
then χV ∗ = χV = χV , and V is the same vector space, but with scalar multiplication conjugated, which implies theequivalence of (1), (2), and (3).
For (3) ⇐⇒ (6), V ∼=V iff there’s a conjugate linear J : V →V (i.e. J (λv) = λJ (v)) commuting with G. Then,J 2 : V →V is linear, so by Schur’s lemma, it’s a scalar, and by looking at its trace, it’s a real scalar. Now, there are twopossibilities:
• If J 2 > 0, then λJ has the same property for any λ ∈C (except λ= 0), so without loss of generality, let J 2 = 1.Now, it’s possible to extract a real representation: Rn = fix(J ) (there is a lot to show here, but it ends upworking out).• If J 2 < 0, then λJ has the same property again when λ 6= 0, so one can assume that λ2 = −1. Then, J
corresponds to the action of j ∈H, so the actions of i and j generate anH-action.There are plenty of details to fill in here, but not too many headaches.
To get up to (5), take a quadratic (or Hermitian) form and average it; then, the result will end up in O(m) (orSp(m)). This is the same argument that shows that every representation over C preserves some Hermitian form; it’sclear why O(n) preserves the standard dot product, but less clear why Sp(m) preserves a symplectic (i.e. C-linear,nondegenerate, and skew-symmetric) form on Cn , where m = 2n.
To see this, observe that Sp(n) Hn by definition preserves∑
xi xi ; thus, it also preserves the form h(x, y) =∑
xi yi , in the sense that h(g x, g y) = h(x, y). This is still H-valued, though, so take the imaginary part Im h :Hn ×Hn →C, which is skew-symmetric. The notation is unfortunate, but makes sense: Im(a+ b i + c j + d k) =(c j + d k) j ∈C. Then, Im(h) is a skew-symmetric, complex linear form. �
Returning to the maximal tori, all of our examples can be collected into a table (not all of which we’ve formallyproved, but none of which is particularly hard to show). In Table 1, some of the notation needs to be explained. The
rotation matrix is simply rot(θi ) =�
cosθi sinθi− sinθi cosθi
�
, and Sn · (±1)n−1 Zn is the action given by the semidirect
product Sn o (Z/2)n−1, and so on.Notice that (X ∗,W ) is isomorphic for SO(2n+ 1) and Sp(2n); this implies that they have a lot in common (e.g.
similar representations), despite having different dimensions and parities.
38If one thinks of these as matrix representations, then V ∗ sends A 7→AT and V sends A 7→A.40

G T W Φ
U(n)
e iθ1
. . .e iθn
Sn ei − e j
SO(2n)
rotθ1. . .
rotθn
Sn · (±1)n−1 Zn ±ei ± e j
SO(2n+ 1)
rotθ1. . .
rotθn1
Sn · (±1)n Zn ±ei ± e j , ±e j
Sp(2n)
e iθ1
. . .e iθn
Sn · (±1)n ±ei ± e j , ±2e j
SU(n)
e iθ1
. . .e iθn
|∑
θi = 0
Sn ei − e j
TABLE 1. Summary of information for some classical compact Lie groups.
Next time, the properties of these roots will be abstracted away into the notion of a root system.
19. ROOT SYSTEMS: 5/12/14
Recall the setup from last time, specifically Table 1. In all cases, an inner product on X ∗ ∼=Zn can be taken to beproportional to
∑
x2i . Also notice that the dimension of the maximal torus of SU(n) is one less than that of U(n),
and its irreducible characters are given by X ∗ ∼=Zn/⟨(1, . . . , 1)⟩, via
(m1, . . . , mn) 7−→ e i(m1θ1+···+mnθn ).
Now, we can draw some pictures of the root systems, as in Figure 3. In each case, dimT = 2, and we’re viewing theroots as within X ∗⊗R.
Notice that the root systems have some similarities: after rotation and scaling, those of SO(5) and Sp(4) look verysimilar, as do those of SO(4) and SU(2)× SU(2). Since these root systems essentially determine the group, then thereare homomorphisms Sp(4)→ SO(5) and SU(2)× SU(2)→ SO(4). These are nearly isomorphisms; in fact, they areisogenies, i.e. surjections with finite kernel, which induce isomorphisms on Lie algebras. They’re also universalcovers.
One can read lots of other stuff off too, e.g. that the copy of the root system of SU(3) inside G2 also induces ahomomorphism.
Looking a bit deeper into these exceptional isogenies, we have SU(2)× SU(2)→ SO(4) and Sp(4)→ SO(5) asabove, and also saw a simpler example earlier on in the class: that of SU(2)→ SO(3). Finally, there’s one last example,SU(4)→ SO(6). The way we wrote this stuff down makes it surprising that this data determines the group, but hereare some illustrations as to why it happens.
• For SU(2)× SU(2)→ SO(4), we saw that SU(2) ∼=H(1) (i.e. the unit quaternions), but H(1)×H(1) acts onH from the left and right, and preserves x x = a2+ b 2+ c2+ d 2. Thus, there’s a map SU(2)× SU(2) to thespace ofH-automorphisms preserving this quadratic form, which is SO(4). Then, one can check that it’s anisomorphism on Lie algebras.
41

������
@@@
@@I
@@@@@R
���
��
-�
6
?
����
@@@R
@@@I
���
������
@@@
@@I
@@@@@R
���
��
-�
?
6
SO(4): Φ= {±ei ± e j } Sp(4): Φ= {±ei ± e j ,±2ei} SO(5): Φ= {±ei ± e j ,±ei}
�����>
ZZZ
ZZ}
ZZZZZ~
���
��=
6
?
�����>
ZZ
ZZZ}
ZZZZZ~
��
���=
6
?
-� ���7
SSSo
SSSw
���/
-�
?
6
SU(3): {ei − e j } G2: an exceptional Lie group SU(2)× SU(2): a degenerate example
FIGURE 3. The root systems of several compact Lie groups with two-dimensional maximal tori.For G2, notice the outer and inner hexagons, and for SU(2)× SU(2), each pair of vectors comesfrom one of the factors, since the roots of SU(2) are given by ±α for a single α.
Another way to view this is that SU(2) C2, so SU(2)× SU(2) C2⊗C2. The representation of SU(2)onC2 is self-dual, because it’s the only one of its dimension, and so the product representation is also self-dual.Thus, it preserves a symmetric bilinear form (since SU(2) C preserves a symplectic form), so it must bewithin SO(4), as proved in Proposition 18.1.• SU(4) acts on V =C4, so we want to make a six-dimensional representation from V , and hope that it’s self-
dual and preserves a quadratic form. The trick is to always pick one side and then try to make a representationfrom it. Six dimensions suggests ∧2V , which has dimension
�42
�
= 6. But why is it self-dual? This is trickier:V isn’t self-dual, since its character isn’t real-valued (and thus changes under conjugation), but
χ∧2V = e i(θ1+θ2)+ e i(θ1+θ3)+ · · ·+ e i(θ3+θ4),
and since the θi must sum to zero, then after conjugating, e−i(θ1+θ2) = e i(θ3+θ4), so this character is preservedunder conjugation, and thus ∧2V is self-dual.
Next, we need a bilinear form ∧2V ×∧2V → C. How about something like (ω,ω′) 7→ω ∧ω′ ∈ λ4V ,which is one-dimensional? Thus, SU(4) acts trivially, and the form itself is symmetric.
When we discuss spin representations, we’ll be able to construct a map going in the other direction.• Sp(4)→ SO(5) is similar, but a bit trickier, and is worth working through.
The general idea here is that there are several useful examples to convince yourself that isomorphic root systems doimply isomorphic groups, as it’s clearer in these smaller-rank cases.
We have now arrived at the point where we can state one of the major classification theorems of the course.
Theorem 19.1 (Classification theorem, first version). If G is a compact, connected Lie group, then G is determined upto isomorphism by (X ∗,W ,Φ).
Recall that here, X ∗ is a free abelian group, W is a finite group acting on X ∗, and Φ⊆X ∗. In fact, though, G isalready almost determined by (X ∗,W ).
42

Theorem 19.2 (Classification theorem, second version). G is determined up to isogeny by (X ∗⊗R,W ,Φ); that is, ifG and G′ have the same triple (X ∗⊗R,W ,Φ), then Lie(G)∼= Lie(G′), or (equivalently) they have the same universalcovering.
This is particularly handy for the Lie-algebraic perspective: on this level, for example, there is no differencebetween Lie(Sp(4)) and Lie(SO(5)).
Along with the theorems presented above, there’s also an axiomatic way of presenting this classification. Unfor-tunately, there are several competing, but slightly different, definitions of root systems. Here’s the one from thetextbook, which was influenced by Serre, who was in turn influenced by Bourbaki.
Definition 19.3. A root system is a tuple (V ,W ,Φ), where V is a finite-dimensional real vector space, W is a finitegroup, and Φ⊂V , such that:
(1) for every α ∈ Φ, there’s a reflection sα ∈ W such that sα : α 7→ −α, and that W is generated by suchreflections.39
(2) ⟨α,β∨⟩ ∈Z for any α,β ∈ Φ.There are also two somewhat minor conditions:
(3) Φ spans V , and(4) if α,β ∈ Φ are proportional, then α=±β.
If (3) is omitted, there is no great consequence: the theory is changed slightly, and becomes more inconvenient.Thus, it is often kept for convenience. Furthermore, axiom (4) is true for compact Lie groups, but we haven’t shownthat yet.
There’s again a less precise version up to isogeny, which is sufficient for most applications, and a more precise one,as follows.
Definition 19.4. A root datum is a triple (L,Φ,Φ∨), such that L is a finite abelian group, Φ ⊂ L, and Φ∨ ⊂ L∗ =Hom(L,Z), satisfying similar axioms.
This notion won’t be as important.
Remark (Dual groups). One amazing consequence of the more precise formulation is that, along with Theorem 19.1,the map (L,Φ,Φ∨) 7→ (L∗,Φ∨,Φ) gives an involution on isomorphism classes of compact Lie groups. This is still a bitof a miracle and not very well-understood (there’s no satisfactory construction; it’s all done after the classification).Here are some examples:
SO(2n+ 1)←→ Sp(2n)SU(n)←→U(n)/Z(U(n))SU(2)←→ SO(3). (
Now, Theorem 19.2 says that G is determined up to isogeny by its root system. There are two more importantfacts that we’ll also need to address.
• Every root system occurs thus (well, up to a minor nuance that we’ll address).• Every root system is a direct sum of root systems of the classical groups SU(n), SO(n), and Sp(n), and the
five exceptional groups G2, F4, E6, E7, and E8.
20. EXCEPTIONAL ROOT SYSTEMS: 5/14/14
Recall that a root system (V ,Φ,W ) is a combination of a real vector space V , Φ⊂V , and a finite group W actingon V and preserving Φ, subject to the following axioms.
(1) For each α ∈ Φ, there’s a reflection sα ∈W negating α, and these generate W . sα is given by v 7→ v−⟨v,α∨⟩α,with α∨ ∈V ∗.
(2) For all α,β ∈ Φ, ⟨α,β∨⟩ ∈Z.(3) Φ spans V . This axiom is less important.(4) If α,β ∈ Φ are proportional, then α=±β, α=±2β, or α=± 1
2β. This axiom is less important.
39This sα is of the form sα(v) = v−⟨v,α∨⟩α, with α∨ ∈V ∗. In this sense, a reflection differs from the identity by a rank-1 term in the directionof α.
43

If G is a compact, connected Lie group, then (X ∗(T )⊗R,Φ,W ), where W is its Weyl group, satisfies all of theseaxioms (though we have yet to show (4) and that the roots generate W for (1)), except for (3). Thus, (spanR(Φ),Φ,W )is a root system. Thus triple (X ∗(T )⊗R,Φ,W ) determines G up to isogeny (i.e. isomorphism on Lie algebras).
There is a direct sum on root systems, given by that which induces the direct product on groups:
(V1,Φ1,W1)⊕ (V2,Φ2,W2) = (V1⊕V2, (Φ1, 0)∪ (0,Φ2),W1×W2).
With this, the following facts are true:• Every root system is a direct sum of classical root systems and those given by G2, F4, E6, E7, and E8.• If one ignores axiom (3), every root system is a direct sum of the root systems mentioned above and the trivial
root system (R,Φ= ;,W = {1}).• Whether or not axiom (3) is used, every root system arises from a compact Lie group.
Of course, these are all theorems! There’s a lot to show here.Interestingly, Killing discovered some of the exceptional Lie groups by discovering extra root systems, which
ended up corresponding to these groups.
X ∗⊗R Φ WAn SU(n) Rn/⟨(1, . . . , 1)⟩ ei − e j SnBn SO(2n+ 1) Rn ±ei ± e j , ±ei Sn · (Z/2)nCn Sp(2n) Rn ±ei ± e j , ±2ei Sn · (Z/2)nDn SO(2n) Rn ±ei ± e j Sn · (Z/2)n−1
TABLE 2. The classical root systems. Often, they’re given the names An , . . . ,Dn .
Another definition of root systems adds an inner product to V and doesn’t need the Weyl group.
Definition 20.1 (Alternate). A root system is a a tuple (V ,Φ⊆V ) such that for each α ∈ Φ, sα(Φ) = Φ, where sα isthe orthogonal reflection α 7→ −α, i.e.
sα(v) = v −2⟨α, v⟩⟨α,α⟩
α,
and subject to the same axioms (2), (3), and (4) as in the previous definition.
This definition is less natural: a W -invariant inner product certainly exists, since W is a finite group, but it mightnot be unique. In the other direction, given this definition of a root system, the Weyl group can be recovered asW = ⟨sα⟩. The notion of isomorphism of root systems is the same in this framework, but one must be mindful thatisomorphisms do not always preserve the inner product.
Exceptional Groups. In order to construct the exceptional groups, one somehow must use exceptional root systems.One way to do this involve Dynkin diagrams, but that’s less important and is left for the text.
Suppose L is a lattice, i.e. a finitely generated abelian group together with an inner product L× L → Z (i.e.extending Zn→Rn gives an inner product). It’s not really important right now that it’s Z-valued.
From L, one can build a root system ΦL (that lacks condition (3)), in which
ΦL = {α ∈ L | sαL= L} ⊆ L.
Specifically, we require the α to be primitive, so that if α = nα′ for some n ∈ Z, then we replace α with α′. Thecondition in building the roots is that the lattice is reflected into itself. Then, the root system is given by (L⊗R,ΦL).
Since α is primitive, then v −⟨v∨,α∨⟩α ∈ L for all v ∈ L is equivalent to requiring ⟨v,α∨⟩ ∈Z. That is,
ΦL =�
α | α∨ = 2α⟨α,α⟩
∈ L∗�
,
whereL∗ = {λ ∈ L⊗R | ⟨λ, L⟩ ⊆Z}.
In some cases, this is easier to remember, or clearer, than the standard definition.For example, if L=Zn with the standard inner product, then ⟨α∨,α∨⟩= 4/⟨α,α⟩, so ⟨α,α⟩ ∈ {1,2,4}, but can’t
actually be 4 (because then, α∨ = α/2 6∈ L, since L has to be primitive). Thus, ⟨α,α⟩= 1, so α=±ei , or ⟨α,α⟩= 2,and α=±ei ± e j . Thus, we get the root system Bn !
44

For any compact Lie group G, we can apply this to L=X ∗(T ) together with an invariant inner product on X ∗⊗R(which can always be arranged to be integral). In most cases, you just get back the root system of G, but in two cases,you get something bigger: an exceptional root system. In this way we can construct G2 and F4.
For SU(3), the maximal torus is
e iθ1
e iθ2
e iθ3
| θ1+θ2+θ3 = 0
,
so any three integers give a character, but if they’re the same, then it’s the trivial character:
(m1, m2, m3) 7−→ e i∑3
j=1 m jθ j .
Thus, X ∗(T ) =Z3/⟨(1,1,1)⟩, which can be given an inner product by projecting the standard inner product on Z3 to(1,1,1). This yields a hexagonal lattice Φ2 such that |Φ2|= 12, and thus one obtains G2. Maybe this isn’t so interesting,because one can get it by hand, but it also induces an embedding SO3→G2 (via the external hexagon in the roots;the internal hexagon only comes up over characteristic 3!).
To get F4, start with SO(8). Let L = Z− span{±ei ± e j | 1 ≤ i , j ≤ 4} ⊂ Z4.40 Thus, this is a four-dimensionalcheckerboard lattice, in that every other point of the full lattice Z4 is missing: certainly, ±εi ± e j ∈ L, since thereflections just permute them around, but there are others, and thus
L∗ =Z4 ∪�
Z4+�
12
,12
,12
,12
��
.
Then, for any β ∈ L∗, ⟨β,β⟩ ∈Z, so if α∨ ∈ L∗, ⟨α,α⟩ ∈ {1,2,4} by the same reasoning. Thus, α ∈ {±ei ± e j ,±e1±e2 ± e3 ± e4}. For α = ±e1 ± e2 ± e3 ± e4, then α∨ = α/2 ∈ L∗, since we specifically included those. This is a rootsystem of size 40, called F4, and there’s a map SO(8)→ F4.
Finally, there’s an eight-dimensional lattice that induces E8, and E6 and E7 can be created by cutting down E8.Start with the checkerboard lattice L in Z8 (created by throwing away every other point). That is,
L∗ =Z8 ∪�
Z8+�
12
, . . . ,12
��
.
There are multiple ways of extending this lattice L into a self-dual lattice Λ (i.e. Λ=Λ∗); right now, it has index 4 inits dual. Instead, we can take the E8-lattice λ= L∪ (L+(1/2, . . . , 1/2)), which is a checkerboard along with a shiftedcheckerboard. This is self-dual, and ⟨x, x⟩ is even for all x ∈ L. A lattice with these two properties is called evenunimodular lattice (i.e. determinant 1) lattice, and these exist only in dimensions 8k, with the E8 lattice the uniqueeight-dimensional one. (This construction also works in dimension 8k for other k).
To understand ΦΛ, ⟨α∨,α∨⟩ = 4/⟨α,α⟩ ∈ Λ∗ = Λ, so ⟨α∨,α∨⟩ is one of 2 or 4, and thus ⟨α,α⟩ is either 1 or2. But all of the lengths are even, so the lengths must be 2. Thus, ΦΛ = {±ei ± e j ,±(1/2)e1 ± (1/2)e2 ± · · · ±(1/2)e8 with an even number of + signs}. There are 112 vectors of the first type and 120 of the second type, so theE8 root system has 240 roots, and thus dim(E8) = 248 (the extra eight dimensions come from Lie(T )).
21. CHAMBERS: 5/16/14
Once again, the actors are:• a compact, connected Lie group G,• its maximal torus T ,• the roots Φ⊂X ∗(T ),• and the Weyl group W .
We have mostly proven that (X ∗(T )⊗R,Φ,W ) forms a root system, and stated without proof that this determines G.Then, we discussed the classification of root systems.
Next, we’ll show that the irreducible representations of G correspond to W -orbits of X ∗, but before that, we’llneed to check a few odds and ends. Recall that for α ∈ Φ, gα = {X ∈ g | Ad(t )X = α(t )X for all t ∈ T }, so thatg0 = Lie(T )⊗C.
Proposition 21.1.(1) If α is a root, then dimgα = 1.
40Alternatively, this is just {(x1, x2, x3, x4) |∑
xi is even}.45

(2) If α,β ∈ Φ are proportional, then α=±β.(3) W is generated by the reflections sα for α ∈ Φ.
It was possible to check these a while ago, but they weren’t really needed until now. (3) develops ideas that we willuse later.
Proof of Proposition 21.1. For (1), look at ια : SU(2) → G. Let g = Lie(G)⊗C as usual (intuitively, we want tocomplexify this because we’re thinking about complex representations). Since G acts on g, then SU(2) does as well,and its action is trivial on ker(α on Lie(T )). Moreover, by the properties of α stated last time it was discussed,
� z 00 z−1
�
acts on gβ by ⟨β,α∨⟩.Let
V =⊕
j∈Zg jα ⊆ g,
so that V is preserved by ια(SU2): Lie(ια(SU2)) =¬
X ,X , H¶
, with X ∈ gα, X ∈ g−α, and H ∈ Lie(T ). Recall alsothat [gα,gβ]⊆ gα+β.
z−2 z−1 1 z1 z2
trivial 0 0 1 0 02-dim. 0 1 0 1 03-dim. 1 0 1 0 1
TABLE 3. A depiction of some irreducible SU2-representations. For example, on ⟨x2, xy, y2⟩, thediagonal matrix with entries (z, z−1) acts on x2 by z2, xy by 1, and y2 by z−2.
Recall the general picture of irreducible SU2-representations, illustrated in Table 3. If W is any representation ofSU2, then let
Wm =§
w ∈W |�
z 00 z−1
�
w = z m wª
,
then dimW0 = (dimW SU2)+ dimW2. This means that if there’s a 1 in the z2-term, then there’s a 1 in the middle.For this representation V , the decomposition is g−2α⊕g−α⊕g0⊕gα⊕g2α, upon which
� z 00 z−1
�
acts respectively as(z−4, z−2, 1, z2, z4), since ια
� z 00 z−1
�
acts on gβ by z⟨α∨,β⟩. Thus, dimT = dimV0 ≥ dimV SU2+dimgα, so dimgα ≤ 1and gkα = 0 when |k| ≥ 2 (by similar reasoning).
This nearly implies (2), too! Suppose α andβ are proportional roots and supposeβ is longer in a G-invariant innerproduct, so that β= cα; if β 6=±α, then |c |> 1. Then, since ⟨α,β∨⟩= 2⟨α,β⟩/⟨β,β⟩= 2/c ∈Z, then c =±2, butwe just saw that g±2α = 0. Oops. Thus, c =±1. �
This last axiom isn’t so important: relaxing it adds only one root system to the classification, which doesn’t evenshow up in the compact case.
For (3), we want to make W act on something and make arguments based on this action. Thus, this group-theoreticargument turns into a geometric one. In fact, geometry is how you prove everything about the Weyl group.
Definition 21.2. Given a root system (X ∗⊗R,Φ,W ), a chamber is a connected component of X ∗⊗Rminus thereflection hyperplanes R⊥α (for each sα).
The proof will boil down to an action of W on the chambers.41
TODO: add a picture of a chamber of SU3.In general, the number of chambers will be shown to be |W |, and the action of W is transitive and doesn’t fix
anything.
Claim.(4) ⟨sα⟩ acts transitively, so that |⟨sα⟩| is at least the number of chambers, and(5) no element of W save for e fixes any chamber (so that |W | is at most the number of chambers).
Putting these together shows that ⟨W ⟩ is equal to the number of chambers, which is equal to |⟨sα⟩|, and that Wacts simply transitively on the chambers (i.e. the action is transitive, and doesn’t fix things in the sense given above).
41I guess that makes W a chamber group?46

Proof of the claim. For (4), here’s a way to get from one chamber to another: pick a point P in the first chamber andQ in the second such that the line between them doesn’t go through the origin. Then, draw the line between them,which intersects some reflection lines in order; then, these reflections in that order bring P into Q. TODO: add apicture of this.
For (5), let w ∈W , w 6= e , so that if w fixes a chamber C , then there’s a v ∈ C fixed by w (take any v ′ ∈ Cand average it under ⟨w⟩). We need to use compactness somehow, so translate this into group-theoretic terms:v ∈ X ∗(T )⊗R = Lie(T )∗ ∼= Lie(T ) (via a G-invariant inner product on Lie(G)). ⟨v,α⟩ 6= 0, since the vectors forwhich this is true were removed to form the chambers, so let X ∈ Lie(T ) be the element corresponding to v , so thatW fixes X .
Let ew ∈ N (T ) (that is, the normalizer) be a representative of w, since W = N (T )/T , and let = exp(Rx) ⊆ T .Then, S is compact, because T is, and it’s connected, since a copy of R is dense inside of it. It’s also an abelian group,so S is a torus, though it may not be maximal. Thus, ew commutes with S , so let Z be the centralizer of S in G, whichwe will prove later is connected.
Specifically, to prove the claim, we’ll need to assume that the centralizer of a torus is connected. This is slightlystronger than the notion of conjugacy of maximal tori. . .
With this assumption, we now can write that Lie(Z) = {Y ∈ Lie(G) | [X ,Y ] = 0} (i.e. Y commutes with X ), andsince X ∈ Lie(T ), then this is just Lie(Z) = Lie(T ), because v isn’t perpendicular to any α. Thus, Z = T , so ew ∈ T ,and thus w = e . �
We’ve now shown completely that (X ∗⊗R,Φ,W ) is a root system. But while we’re on the subject of chambers,each chamber gives rise to a basis (sometimes called a base, or a “system of simple roots”) inΦ, i.e. a set {α1, . . . ,αn} ⊆ Φsuch that
(1) they are an R-basis for the root system RΦ, and(2) every root can be written
∑
niαi , where ni ∈ Z and are all either all ≥ 0 or ≤ 0 (so there’s nothing of theform α1−α2).
In particular, this divides the roots into Φ= Φ+ ∪Φ−, those where al of the ni are at least 0 or at most 0, respectively.These can be constructed by taking some chamber C and a λ ∈C . Then, λ∗ divides the space into two: {v | ⟨λ, v⟩ ≥ 0}and {v | ⟨λ, v⟩ ≤ 0}. But no root lies along the line ⟨λ, v⟩= 0}, since that’s a reflection plane, so it lies in no chamber,and thus Φ= Φ+ tΦ−, where Φ+ = {⟨α,λ⟩ ≥ 0} and Φ− = {⟨α,λ⟩ ≤ 0}.
Then, it’s possible to obtain a basis by choosing α1, . . . ,αn to be a set of minimal elements in Φ+, i.e. those thatcannot be written as a sum of two other roots in Φ+. The proof, however, will have to be deferred to the next lecture.
22. REPRESENTATIONS AS ORBITS OF THE WEYL GROUP: 5/19/14
The next step in the classification of Lie groups will be to prove that irreducible representations of a compactconnected Lie group G correspond to W -orbits of X ∗(T ).
Recall that a chamber in V =X ∗(T )⊗R is a connected component of
V −⋃
α∈Φα⊥,
where α⊥ is the reflection hyperplane for a given root α, and that W acts simply transitively on the chambers.For example, on Un , X ∗(T ) = Zn and Φ ⊃ {ei − e j }; then, the reflection hyerplanes are α⊥ = {xi − x j }. Thus,
one chamber is the region {x1 > x2 > · · ·> xn} ⊆Rn , and the others are {xσ(1) > xσ(2) > · · ·> xσ(n)} ⊆Rn , for someσ ∈ Sn . It’s clear in this case that the Weyl group Sn acts simply transitively on the chambers.
Given a chamber C , there’s a division Φ= Φ+∪Φ−, where Φ+ = {α | ⟨α,λ⟩ ≥ 0} for any λ ∈C (they all lead to thesame division), and Φ− = {α | ⟨α,λ⟩ ≤ 0}. Then, α ∈ Φ+ iff −α ∈ Φ−, and if α,β ∈ Φ+ and α+β is still a root, thenα+β ∈ Φ+.
Here’s a picture in the case G = SU3: TODO.
Definition 22.1. Given this division Φ= Φ+ ∪Φ−, a system of simple roots for Φ is a set of minimal elements of Φ+:they cannot be written as a sum of two other roots.
Example 22.2.(1) B = {α1,α3} in the above picture (again, TODO) is a set of minimal elements for the root system of SU3,
since α2 can be written as a sum of the others.47

(2) For Un and C = {x1 > x2 > · · ·> xn}, Φ+ = {ei − e j | i < j } and Φ− =−Φ+ (e.g. by taking λ= (n, n− 1, n−2, . . . , 1) ∈C ), and B = {ei − ei+1}, since (for example) ei − ei+2 = (ei − ei+1)+ (ei+1− ei+2). Notice that B is avector-space basis for X ∗⊗R; this is not a coincidence. (
One can spend quite a lot of time on the geometry of root systems.An alternate characterization of the minimal elements is, as hinted above, a basis.
Definition 22.3. A basis B for a root system Φ is an R-basis for RΦ such that every α ∈ Φ can be written as
α=∑
γ∈B
nγγ ,
where nγ ∈Z, nγ ≥ 0 when α ∈ Φ+, and nγ ≤ 0 when α ∈ Φ−.
This basis ends up being convenient for computing things in.
Theorem 22.4. The minimal elements form a basis.
Proof sketch. Clearly, every element in Φ is decomposable as a Z-linear combination of elements of a minimal set B(just break them down into sums, and keep going until only minimal elements remain), so B spans RΦ.
The next step is to address linear independence. If α,β ∈ B , then ⟨α,β⟩ ≤ 0 (after we’ve chosen an invariant innerproduct); this is because if ⟨α,β⟩ > 0, then sβα ∈ Φ, which ends up implying (via the root system axioms, or therepresentation theory of SU2)42 that α−β ∈ Φ. Without loss of generality, α−β ∈ Φ+, but then, α= (α−β)+βisn’t minimal, so this is a contradiction. Thus, by geometry, this implies the elements of B are linearly independent,because they are all at obtuse angles to each other, and all lie on the same side of a hyperplane. �
The full proof can be found in the textbook.Returning to representation theory, recall that we’re trying to prove that the irreducible representations of a
compact, connected Lie group G are parameterized by W -orbits of X ∗(T ). For example, each orbit for Un ofX ∗(T ) =Zn under W = Sn corresponds to one irreducible representation; that is, each choice of λ1 ≥ · · · ≥ λn forλi ∈Z.
The representation Vχ corresponding to a given χ ∈X ∗ has the property that
Vχ |T =�
⊕
χ ′∈Wχ
χ ′�
⊕ (smaller ψ ∈X ∗(T )),
for a meaning of “smaller” that will be clarified. Furthermore, we will be able to write down an explicit characterformula.
In the case G = SU2, T consists of matrices of the form� z 0
0 z−1
�
, so let
χm :�
z 00 z−1
�
7−→ z m .
Then, the irreducible components are given in Table 4. Here we can see that “smaller” means components for whichthe length in some inner product is strictly less than that of χ . We could have used the explicit character formula forthis, but it illustrates the complexity of the general case, and in fact it looks pretty, but nobody really uses it.
representation on G restriction to TVχ0
1-dim. rep. of SU2 χ0Vχ1
2-dim. rep. of SU2 χ1⊕χ−1Vχ2
3-dim. rep. of SU2 χ2⊕χ0⊕χ−2Vχ3
4-dim. rep. of SU2 χ3⊕χ1⊕χ−1⊕χ−3
TABLE 4. Table of irreducible components of a representation of SU2.
We’ll dive into the proof of these statements next week. It’s all a generalization of what we can see in the case ofthe unitary group, which we’ll recall right here.
42A third valid way to prove this would be to classify all five examples, but that’s kind of tedious.48

Outline of the proof for Un . The key point is the Weyl integration formula. Let T =� z1
...zn
�
as usual and f be a
class function on Un , so that∫
Un
f =1n!
∫
T
f ·∏
i 6= j
�
zi
z j− 1
�
dt
=1n!
∫
T
f
D︷ ︸︸ ︷
�
�
�
∏
i< j
(zi − z j )�
�
�
2. (22.5)
This will end up generalizing in the following way:∫
G
f =1|W |
∫
T
f ·∏
α∈Φ(α(t )− 1)dt .
In this general case, we will have to choose a chamber and some positive roots to simplify this.Returning to the specific case of Un , (22.5) says something interesting about the eigenvalue distribution of a random
unitary matrix; the formula is different for other classical groups, and thus the resulting eigenvalue distributiondiffers.
If V is an irreducible Un -representation, then ⟨χV ,χV ⟩= 1, so∫
Un
|χ |2 = 1n!
∫
T
|χD |2,
which brings us to Fourier analysis, or the representation theory of the torus. On T , χ is a Z-linear combination ofelements of X ∗(T ), because V splits into irreducibles over T , so there are some m1, . . . , mn ∈Z≥0 such that
χ
z1. . .
zn
=∑
amz m11 · · · z
mnn .
Furthermore, these am are symmetric in (m1, . . . , mn).43 Additionally, D is skew-symmetric,44 Thus,
Dχ =∑
bmz m11 · · · z
mnn ,
wherebσ(m) = sign(σ)bm.
Thus, if bm 6= 0, then all of the mi must be distinct, as swapping the identical ones would cause it to change sign.Thus, if it’s nonzero, then
∑
|b 2m|= n!, since one must be ±1, and then adding all its permutations means there can’t
be anything else.Thus, there exists an m0 such that bσ(m0)
= sign(σ), and bm = 0 if m 6= Sn ·m0 (that is, it’s not in the orbit). Hence,the character formula pops out:
χV =±∑
σ∈Smsign(σ)z m1
σ(1) · · · zmnσ(n)
∏
i< j (zi − z j ).
Notice how this follows only from ⟨χV ,χV ⟩= 1. This miracle will hold on a general G, with the twist that D isonly skew-symmetric up to a cocycle.
Moreover, since the χV form a basis, then all of the m = (m1, . . . , mn) with m1 > · · · > mn must arise; if not,then Fourier analysis on the torus would point out that something must be orthogonal to all of them, and then theremaining assertions about χ and expressing it in terms of smaller representations comes from calculations similar tothose on Homework 1.
Finally, we will have to compute the Weyl integration formula, which comes down to calculating the Jacobian.43That is, if one swaps z1 and z2, the same character comes out in the end, because those elements are conjugate. This comes from the Weyl
group in general, where we can swap only those elements which are symmetric under it.44This turns out to not quite be true in the general case, but is close enough to work.
49

23. SPIN GROUPS: 5/23/14
Today’s lecture was given by Zhiwei Yun.Spin groups are double covers of SOn . We’ll deduce their existence, discuss their root systems, and provide an
explicit construction.Notice that SOn is not simply connected, e.g. SO2
∼= S1, which of course isn’t simply connected, and SO3�2:1SU2∼=
S3 and is also the group of unit quaternions, so π1(SO3)∼=Z/2Z.
Theorem 23.1. π1(SO3)∼=Z/2Z if n ≥ 3.
Proof. Embed SOn ,→ SOn+1 via A 7→ (A1 ). We want to show this induces an isomorphism on fundamental groups.
The action of SOn+1 on Sn ⊂Rn+1 is transitive, and the stabilizer of x= (0, . . . , 0, 1) is Stab(x) = SOn , embeddedas above. Thus, there’s a fibration SOn+1� Sn by g 7→ g · x (the preimage of any point is isomorphic to SOn), andso one gets a fibration
SOn� � // SOn+1
// // Sn
which is in fact a short exact sequence, and furthermore is locally trivial. But this means there’s a long exact sequence
· · · // π2(Sn) // π1(SOn)
ϕ // π1(SOn+1) // π1(Sn) // π0(SOn).
π0(SOn) = 0 because SOn is connected. This long exact sequence is attached to any fibration, which can be seenfrom any textbook in homotopy theory. We want to show that ϕ is an isomorphism, but π1(S
n) and π2(Sn) are both
trivial when n ≥ 3, so this implies ϕ :π1(SOn)∼→π1(SOn+1). Thus, since π1(SO3)∼=Z/2, then π1(SOn)∼=Z/2 for
all n ≥ 3. �
This means that there’s a connected double cover of SOn , and it’s a universal cover, by the general theory ofcovering spaces. And from the general theory of Lie groups, this universal cover ÞSOn carries a Lie group structure;this will be the spin group Spinn , and so it abstractly exists.
We saw above that Spin3∼= SU2. For Spin4, recall that H acts on itself from the left and right, and SU(2) ⊂ H
is the set of unit quaternions. Thus, SU(2)× SU(2) acts from the left and right on H, and preserves the norm, sothere’s a homomorphism SU(2)× SU(2)→ SO(4). Since both have dimension 6, then this is a covering map, andsince SU(2)× SU(2) is both connected and simply connected, then it’s the universal cover. Thus, Spin4
∼= SU2× SU2.These coincidences arise when n is small: in general, it’s not possible to write Spinn in terms of other groups, and
so we’ll give a more general construction.
The Root System. We can actually figure out the abstract structure of the root system for Spinn . Recall that themaximal torus T for SOn is given by 2× 2 rotation matrices (and possibly a 1 at the end), so there are m = bn/2cblocks, giving SO(2)m . Then, the maximal torus for Spinn is just the preimage of the covering map:
eT �� //
��
Spinn
��T �� // SOn
This requires showing that eT is connected, but that follows from general covering space theory: it induces a surjectionon π1: SO(2)→ SO(n) is sent to Z→Z/2.
Thus, the roots of Spinn lie in X ∗( eT ) =Hom( eT , S1), which is a free abelian group with rank equal to that of eT ,and the roots of SOn lie in X ∗(T ) =Hom(T , S1). But whenever we have a map eT → T , Hom induces a map in theother direction, X ∗(T )→ X ∗( eT ), so the roots of Spinn satisfy {roots of Spinn ⊂ X ∗(T ) ⊂ X ∗( eT ). In general, theroots come from the action of the torus on the Lie algebra, so the roots of a Lie group and its universal cover arecanonically identified.
Let εi : T → SO(2) = S1 be the projection to the i th copy of the lattice, so that X ∗(T ) = Zε1⊕ · · · ⊕Zεm , andrecall that the roots of SOn are ±εi ± ε j for i 6= j if n = 2m and additionally ±εi if n = 2m+ 1.
It remains to describe X ∗( eT ), which is bigger than X ∗(T ), but only slightly so. Since eT → T is a 2:1 cover, so theindex [X ∗( eT ) : X ∗(T )] = 2. Thus, the concrete picture (TODO) is that of a sublattice of index 2 inside the lattice
50

X ∗( eT ). There are two ways to get a lattice of index 2, but if you multiply anything in X ∗( eT ) by 2, it lands in X ∗(T ).Thus,
index 2m︷ ︸︸ ︷
X ∗(T )⊂X ∗( eT )︸ ︷︷ ︸
index 2
⊂ 12
X ∗(T ),
akin to Z[1/2]m and Zm . Thus, (1/2)X ∗(T )/X ∗(T )∼=X ∗(T )⊗ (Z/2Z), which is an F2-vector space of rank m, andX ∗( eT )/X ∗(T ) is a line in said F2-vector space, the span of some vector.
To describe this, we’ll use the action of the Weyl group, which is the same for Spinn and SOn .45 In particular, theline X ∗(T )/X ∗( eT ) is stable under the action of W on that vector space.
But the action of W on this vector space surjects to S2 acting on it, because W � Sn acts on F2 · ε1⊕ · · ·⊕F2 · εm .But only one line is invariant under this action: that spanned by (1, . . . , 1), since this is the only eigenvector. Thus,the lattice gets uniquely pinned down, as
X ∗( eT ) = SpanZ
§
ε1,ε2, . . . ,εm ,12(ε1+ · · ·+ εn)
ª
=§
∑
aiεi | ai ∈12Zª
.
The roots are identical, but they live in this slightly bigger lattice.
Construction of the Spin Groups. We’ll be able to provide an explicit construction of these groups, but it’s notthat straightforward; we’ll need to introduce some auxiliary objects, which are in themselves very important.
Let (V , q) be a quadratic space over R (i.e., q is a nondegenerate quadratic form, though we don’t need it to bepositive definite yet).
Definition 23.2. The Clifford algebra of (V , q) is C`(V , q) = T (V )/⟨v ⊗ v + q(v) · 1 | v ∈V ⟩ (recall that T (V ) isthe tensor algebra of V ,
⊕∞i=0 V ⊗n , and that the angle brackets denote the two-sided ideal generated by the elements
inside it).
For example, v1(3+ v1v2+ v1v2v3) = 3v1+(−q(v1)v2)+ (−q(v1))v2v3, so multiplication of any vector with itselfyields a scalar.
This seems like quite an artificial object, but we’ve seen it before, albeit as a degenerate example: Λ∗(V ) =T (V )/⟨v ⊗ v⟩=C l (V , 0); then, the general C`(V , q) can be seen as a deformation of Λ∗(V ). In particular, one canprove that they have the same dimension: dim(C`(V , q)) = 2n if dim(V ) = n.
If e1, e2, . . . , en is an orthonormal basis for (V , q) (i.e. q(ei ) =±1), then C`(V , q) has as a basis
{ei1ei2· · · eik
| 1≤ i1 ≤ i2 ≤ · · · ≤ ik ≤ n}.
Reordering only changes the value up to sign, because applying the relation to ei + e j gives ei e j + e j ei = 0.Letting C :=C`(V , q), there’s an obvious grading C =C 0⊕C 1 into even-degree and odd-degree parts, respectively,
because the imposed relation has purely even degree. Thus, C 0 is a subalgebra, and acts on the odd part: C 1 is aC 0-module, and since V ,→ T (V ) still survives under the quotient (look at the explicit basis), then V ⊂C 1 also.
We’ll also need an involution on the Clifford algebra, called transposition, x 7→ xT, which sends
ei1· · · eik
7−→ eikeik−1· · · ei1
.
Like matrix transposition, this satisfies (xy)T= yT · xT.46
Since C = C 0 ⊕C 1, then there must be an order-2 operator ε such that this is its eigenspace decomposition:ε ·C 0 = 1, and e ·C 1 =−1 (i.e. that’s what ε restricts to on each part), and it’s an algebra automorphism. Thus, wecan define a “norm” N (x) := x · ε(xT) ∈C .
Exercise 23.3. Piece these things out in the case dim(V ) = 2, and where q is the standard quadratic form. In thiscase, C`(V , q)∼=H, and N becomes the usual norm.
45This technically needs to be checked, but follows from the definition: take the preimage of N (T ) under the covering map. This ends upholding true for any covering of Lie groups.
46This can actually be defined using the universal property of the Clifford algebra: it is the unique operator that restricts to the identity on V ,and satisfies (xy)T= yTxT.
51

Definition 23.4. Spin(V , q) = {x ∈ C 0,× | xv x−1 ∈ V for every v ∈V , and N (x) = 1}. Here, C 0,× is the set ofinvertible elements in C 0 (though if N (x) = 1, x turns out to automatically be invertible).
Now, we have a spin group associated to any quadratic form q .
Theorem 23.5. If q is positive definite, then Spin(V , q)→ SO(V , q) is the universal cover.
This map exists because anything in Spin(V , q) acts on V by conjugation within C`(V , q), and this action preservesthe quadratic form, so it ends up mapping to something in the orthogonal group: for any x ∈V \ 0, viewed as in C 1,the actionv 7→ (−x)v x−1 turns out to be invertible. Thus, Spinn falls out for the standard case.
24. THE WEYL INTEGRATION FORMULA: 5/28/14
“When I was a graduate, most of my classes had about three students. The goal was to avoid being thesingle remaining person in a class. It was very delicate.”
Today, all integrals will be taken with respect to the Haar measure with total mass 1.Recall that for Un , the Weyl integration formula was
∫
Un
f =1n!
∫
Tf∏
i< j
|zi − z j |2, (24.1)
where T is the maximal torus of Un (i.e. the diagonal matrices with entries in S1), and f is a class function.
Proposition 24.2. In general, if G is a compact Lie group and T ⊂G, Φ⊂X ∗(T ), and W are defined as normal, thenfor a class function f on G,
∫
Gf (g ) =
1|W |
∫
Tf (t )
∏
α∈Φ(α(t )− 1). (24.3)
When G =Un , this reduces to (24.1) in not very many steps.The formula (24.1) means in words that if one chooses a g ∈Un according to the Haar measure, the probability
distributions of the eigenvalues z1, . . . , zn is1n!
∏
i< j
|zi − z j |2 dz1 · · · dzn .
Thus, the eigenvalues tend to repel each other (which is still mostly true for more general G).
Proof of Proposition 24.2. This proof won’t be that hard, and follows from the use of the Jacobian and a change ofvariables G/T ×T →G, sending (x, t ) 7→ x t x−1. This is more general than we need, though: we only care about theclass function case, which simplifies a bit further.
The proof leans on the following fact.
Proposition 24.4. Suppose M and N are compact, oriented manifolds of the same dimension d and f : M →N is smooth.Then, there exists an m ∈Z such that for any volume form ω on M ,
∫
M f ∗ω = m∫
N ω.
This m is called the degree of f , and is equal to the number of preimages of a generic point in N . That is, forx ∈N , let y1, . . . , yn be its preimages in M , and count each one with a +1 if orientation is preserved or −1 if it isn’t;this weighted sum is equal to m almost everywhere (according to the Lesbegue measure in each coordinate chart).
The example to keep in mind is e iθ 7→ e i nθ, S1→ S1. The proof of this intermediate proposition is easy in the caseof x covered by f (as if it were a covering map), and then the rest follows by deformingω.
We’ll use this for G/T ×T →G. Let ω and µ be G-invariant (both left and right) volume form ons on G andG/T , respectively (i.e. differential forms of top degree), and ν be a T -invariant volume form on T . These will beuseful because the Haar measure was constructed by integrating an invariant volume form.
We’ve discussed whyω and ν ought to exist: it can be first fixed at the identity as an element of ΛdimG(LieG)∗,and then define it elsewhere using G-invariance. But this is a bit of a problem on G/T , since there are multiple waysto left-translate, so to construct µ, one needs to show that T acts trivially on Λdim(G/T )(Lie(G)/Lie(T )), which isequivalent to saying that the determinant of T acting on Lie(G)/Lie(T ) is 1. But this determinant is precisely
det=∏
α∈Φα,
and since the roots come in {x, x−1}-pairs, then this works. It’s hardly a triviality, but it’s not all that important.52

We can and should chooseω, µ, and ν to be compatible, so that∫
Gf (g )dω =
∫
G/T
∫
Tf dµdν,
or equivalently, requiring that they’re all compatible at e , which is carefully worked out in the textbook:
ω|e ∈Λdim(G)(Lie(G)∗),
µ|e ∈Λdim(G)−dim(T )(Lie(G)/Lie(T ))∗,
ν |e ∈Λdim(T )(Lie(T )∗).
Recall that if W is an m-dimensional subspace of the n-dimensional vector space V , there’s a canonical isomorphismΛnV ∼= (ΛnW )⊗ (Λn−m(V /W )); then, the goal is to make them compatible with that isomorphism.
Now,ω defines the Haar measure on G:∫
G f =∫
G f dω. Let π : G/T ×T →G send (x, t )→ x t x−1; this willend up being surjective, so that everything in G is conjugate to something in T , but we haven’t shown that yet. Letm = deg(π) (as in the aforementioned proposition), so that
∫
G
f dω =1m
∫
G/T×T
π∗( f ω)
=1m
∫
x∈G/T ,t∈T
f (x t x−1)π∗ω
=1m
∫
G/T×T
f (t )J (x, t )µ∧ ν,
where J is the Jacobian, defined as π∗ω = J (x, t )µ∧ ν , specifically evaluated at the point (x, t ). Thus, the next step isto compute the Jacobian.
Because µ is G-invariant on G/T and ω on G is both left and right G-invariant (see the discussion on Haarmeasure for a reason why), then J (x, t ) is independent of x! This is because if x, x ′ ∈G/T , then they can be translatedto each other, but volume forms don’t change, so this is unaffected. Thus, call the Jacobian simply J (t ). Thus, theformula now looks like this:
∫
G
f =1m
∫
G/T×T
f (t )J (t )µ∧ ν
=�
1m
∫
Tf (t )J (t )ν
�
Vol(G/T ).
Next, normalize (by scaling) ω and ν such that∫
Gω = 1 and∫
T ν = 1. Thus, by the compatibility condition,Vol(G/T ) = 1, so
∫
G
f =1m
∫
T
f (t )J (t ),
where the right-hand side is also Haar measure.There are two ingredients left now: J and m, and the computation of J is probably the most important part of the
entire proof.Since J is independent of x, we’ll compute it at x = 1, so at (eT , t ). Then, explicitly linearize: let u⊆ Lie(G) be
the orthogonal complement to Lie(T ), so u∼→ Lie(G)/Lie(T ).
Locally, near (eT , t ) ∈G/T ×T , this map looks like this for X ∈ u and Y ∈ Lie(T ):
(eX T , t eY ) 7−→eX t eY e−X
= t (t−1eX t )eY e−X
= t�
eAd(t−1)X�
eY e−X
≈ t eAd(t−1)X+Y−X
53

to first-order, since multiplication acts like addition. In effect, Ad is the Lie-algebraic version of conjugation.In other words, the linearization of π at (eT , t ) looks like
(X ∈ u,Y ∈ Lie(T )) 7−→ (Ad(t−1)− 1)X +Y ∈ Lie(G) = u⊕Lie(T ).
Now, we only have to compute the determinant: J (t ) is the determinant of Ad(t−1) acting on u (since this map is theidentity on Y ). But the eigenvalues of Ad(t ) on u= Lie(G)/Lie(T ) are the roots {α(t )}α∈Φ, just by definition, sosince the roots come in inverse pairs,
J (t ) =∏
α∈Φ(α(t )−1− 1) =
∏
α∈Φ(α(t )− 1).
This is the core of the computation. It says that if some root has α(t ) near 1 (e.g. close eigenvalues in Un), conjugationdoesn’t move it very much.
Now, the formula is nearly complete: it still has the degree, though.∫
G
f =1m
∫
T
f (t )∏
α∈Φ(α(t )− 1)dt .
In this formula, the Jacobian is positive because the pairs are α(t ) and α(t )−1 = α(t ), so the product is over a numberof squared terms. Thus, π is positively oriented when J (t ) is nonzero (where the orientations were specified with thedifferential forms that were chosen).
Now, choose a t0 ∈ T generic in that α(t0) 6= 1 for all α ∈ Φ and ⟨t ⟩0 = T (e.g. in Un , one requires there to be norepeated eigenvalues). Then, we’ll figure out what m is by counting its preimages. If (xT , t ) π7→ t0, then x t x−1 = t0,so x−1 t0x = t , and thus x−1⟨t0⟩x ⊂ T . Thus, x−1T x ⊂ T so x ∈N (T ). Conversely, each element of N (T ) creates apreimage (x, x−1 t0x) of t0, and all of these are distinct (which is important to check). Thus, m = |W |. It remains tocheck that the set of these generic points has positive measure, so that it intersects the full-measure set (it does havefull measure, of course, but it’s not super relevant). �
In Un -land, this means that if D1 and D2 are conjugate diagonal matrices, then D1 permutes the elements of D2.
25. SKEW-SYMMETRY AND THE WEYL INTEGRATION FORMULA: 5/30/14
“It’s not fun, is it. . . you look sad. I was about to say ‘it’ll get better,’ but maybe not.”Last time, we stated the Weyl integration formula, (24.2), for a compact connected Lie group G and class functionson it, and we showed that G/T ×T
π→G has degree |W |> 0, and thus π is surjective. Thus, every element of G isconjugate to an element of T . This is stronger than the result we had before, which was only that the maximal toriare conjugate to each other. In concrete cases, it boils down to the Spectral Theorem.
Corollary 25.1. If S is a torus in G, then its centralizer Z(S) is connected.
Proof. Let g ∈ Z(S) and S ′ = ⟨S, g ⟩; the latter is an abelian Lie group. Let g ′ ∈ S ′ be generic, so that ⟨g ′⟩ = S ′.47
Then, g ′ is conjugate to an element of T , so after conjugation, we can assume S, g ⊆ T , and therefore g can be joinedto e inside Z(S), because T ⊆ Z(S) and g can be joined to e within T . �
This corollary is very important in theory, but is a bit abstract to easily appreciate.
Corollary 25.2. exp : Lie(G)→G is surjective.
Proof. This is true for T , but then every element of G is conjugate to one in T . Alternatively, one could put a metricon G and think about minimal length paths. �
Returning to representation theory, we want to write∏
α∈Φ(α(t )− 1) = |D(t )|2
for some D , which will make computations in the L2-norm easier. Since the α come in conjugate pairs,this is possible,but it will require breaking symmetry in some way.
47If S ′ is disconnected, then let S ′e be the connected component of the identity, so that S ′/S ′e = ⟨g ⟩; thus, such a generic g ′ exists.54

Let C be a chamber on Lie(T )∗ (i.e. a connected component of Lie(T )−⋃
α⊥). This chamber gives a decompositionΦ= Φ+ ∪Φ−, wher Φ+ = {α | ⟨λ,α⟩> 0} for some (or any) λ ∈C , and Φ− = {α | ⟨λ,α⟩< 0}. The minimal elementsof Φ+ (those that aren’t the sums of others) give a basis for Φ; recall the picture from the case G = SU3.
Thus, we can write∏
α∈Φ(α(t )− 1) =
∏
α∈Φ+(α−1− 1)
∏
α∈Φ−(α−1− 1)
=
�
�
�
�
�
∏
α∈Φ+(α−1− 1)
�
�
�
�
�
2
=
�
�
�
�
�
∏
α∈Φ+(1−α−1)
�
�
�
�
�
2
.
Call this quantity D(t ), so that the Weyl integration formula becomes∫
G
F =1|W |
∫
T
|D(t )|2F .
This is non-obvious already for constant functions: lots of things cancel.Notice that for Un , the formula we got is
D(t ) =∏
i< j
�
1−zi
z j
�
,
rather than∏
i< j (zi − z j ). This is annoying, because it’s not strictly skew-symmetric, even though it comes fromthe more general formula. It’s almost skew-symmetric, though. . . In this context, “skew-symmetric” should begeneralized from Sn to W , so a skew-symmetric function f on G is such that whenever t ∈ T and w ∈W , f (w t ) isthe determinant of w, acting on X ∗, multiplied by f (t ). So we end up computing the W -action on D .
For w ∈W ,
wD =∏
α∈Φ+(1−wα−1(t )).
Some of the wα−1(t ) ∈ Φ−, so it’s not just a matter of rearranging signs. A bit more elegantly, rewrite it as
D =∏
α∈Φ+
�pα− 1pα
�
1pα= ρ−1
∏
α∈Φ+
�pα− 1pα
�
,
where ρ=∏
α∈Φ+pα (or additively, it’s (1/2)
∑
α, in Lie(T )∗). This is the connection we need: it shows up acrossrepresentation theory, as a spin structure somewhere. But what do
pα and ρmean? They make sense on a suitable
covering of T , in the usual sense of square roots of holomorphic functions.Under the action of w, there is some number of roots whose sign is flipped; call this number sign(w), so that
wD = (wρ)−1∏
α∈Φ+
�pwα− 1
pwα
�
= (wρ)−1∏
α∈Φ+
�pα− 1pα
�
(−1)sign(w)
=ρ
wρ·D · sign(w).
Proposition 25.3. sign(w) = det(w on X ∗).
Thus, this would be skew-symmetric except for the ρ/wρ term. There’s another fact about ρ which we’ll want tohave around for later.
Proposition 25.4. If B is the basis associated to a chamber C , then ⟨ρ,α∨⟩= 1 for every α ∈ B.55

For example, with Un and the chamber given before, i.e. C = {a1 > a2 > · · ·an} and basis {ei − e j | i < j }, then
ρ=12
�
(e1− e2)+ (e1− e3)+ · · ·+(e1− en)+ (e2− e3)+ · · ·+(en−1− en)�
=12((n− 1)e1+(n− 3)e2+ · · ·+(1− n)en),
so in standard coordinates,
ρ↔ 12(n− 1, n− 3, n− 5, . . . , 1− n).
Then, in the basis B ,
ρ, ei − ei+1
�
= 1, since it’s the difference of two adjacent entries.
Proof of Proposition 25.4. Recall that ρ= (1/2)∑
β∈Φ+β, and that for α ∈ B and β ∈ Φ+, sαβ ∈ Φ+ unless β= α (inwhich case, of course, sαα=−α). This is because everything in Φ+ can be written as a linear combination of thingsin B , so the α term s negative, but everything else is still positive.
The point is, though, sαρ= ρ−α, so ⟨ρ,α∨⟩= 1. �
Proof sketch of Proposition 25.3. This also shows that if w = sα, then sign(w) = det(sα). Then, ⟨sα : α ∈ B⟩ generatesW , which is the rough idea.
There’s no good way around this ρ; it’s a fact of life when doing representation theory of compact groups.Apparently it corresponds to taking the square root of the spinor bundle (?) on the flag variety, which in the case ofRiemann surfaces is a spin structure.
So some clumsiness is inevitable in the general case, unlike for the unitary group. Thus, we’ll declare a modifiedaction ∗ of W on X ∗(T ), defined by taking w ∗χ = w(χ +ρ)−ρ on X ∗⊗R, i.e. w acts in the same way, but theorigin has been shifted to −ρ, so that −ρ is fixed by this action.
For SU(2), T =� z 0
0 z−1
�
and X ∗(T ) ∼= Z, via m 7→ (z 7→ z m), with Φ = {2,−2}: Φ+ = {2} and Φ− = {−2}. Thismeans ρ= 1, so the old action of W is a negation, but the new action is reflection about the point −1.
By modifying in this way, D is literally skew-symmetric: w ∗ D = sign(w)D. D is a linear combination ofcharacters, as
D =∏
(1−α−1) ∈Z[X ∗] =∑
nχχ ,
so w∗ applies this new action on all of them; thus,
w ∗D =∑
α
nα(w ∗χ ).
This is nice, because w∗ was defined to make it come through.For example, in SU(2) again, D(t ) = 1−a−1(t ), where {α}= Φ+. This doesn’t look symmetric, until one recenters
at ρ.Next time, we’ll take the proof from Un and adapt it to general G, which will be much easier now that it is
skew-symmetric.
26. IRREDUCIBLE REPRESENTATIONS: 6/2/14
It’s now time for one of the big theorems of the course.
Theorem 26.1. Let G be a compact, connected Lie group, and denote T ⊂G and Φ⊂X ∗ as usual. Let C ⊂X ∗⊗R be achamber inducing Φ= Φ+ ∪Φ− and ρ= (1/2)
∑
Φ+ α. Then:(1) The irreducible representations of G are parameterized by X ∗(T )/W , i.e. Weyl orbits on X ∗. Each Weyl orbit on
X ∗ has a unique representative in C (the closure of the chamber).(2) Recall that for w ∈W and χ ∈X ∗⊗R, w ∗χ = w(χ +ρ)−ρ and sign(w) = det(w on X ∗) ∈ {±1} (since it
preserves a quadratic form). Then, for any χ ∈X ∗ ∩C , let Vχ be the corresponding irreducible representation, sothat the character of Vχ on T is
characterT (Vχ ) =∑
w∈W w ∗χ sign(w)∑
w∈W w ∗ 1sign(w)=∑
w∈W w(χ +ρ) sign(w)∑
w∈W wρ.
56

1, sometimes denoted 1, is the trivial character for T . Moreover,∑
w∈W
w ∗ 1 sign(w) =D =∏
α∈Φ+(1−α−1).
(3) There is a dimension formula polynomial in χ :
dimVχ =∏
α∈Φ+⟨χ +ρ,α⟩∏
α∈Φ+⟨ρ,α⟩.
(4) Finally, when one writeschar(Vχ ) =
∑
α∈X ∗(T )
mαα,
so that mα denotes the multiplciity of irreducibles, then mα = 0 if |α|> |χ |,48 and if |α|= |χ |, then mα ≤ 1, withequality only if α ∈W ·χ .
Example 26.2. On Un , recall that• X ∗(T )∼=Zn ,• Φ= {ei − e j },• One chamber is C ⊂Rn is given by {a1 > · · ·> an}, so its closure is C = {a1 ≥ a2 ≥ · · · ≥ an}.• Then, Φ+ = {ei − e j | i < j },• W = Sn , and• ρ= (1/2)(n− 1, n− 3, . . . , 1− n).
Then, the W -orbits of (m1, . . . , mn) ∈Zn are up to permutation, so there’s a unique representation parameterized bym1 ≥ · · · ≥ mn .
For part (2), the character formula for Un becomes
χVm1,...,mn
z1. . .
zn
=
∑
σ∈Snz m1+(n−1)/2σ(1) · · · z mn−(n−1)/2
σ(n) sign(σ)∑
σ∈Snz (n−1)/2σ(1) · · · z (n−1)/2
σ(n) sign(σ)
=det(z
m′ji )
det(zµ′ji )
,
where m′1 = m1+(n− 1)/2, m′2 = m2+(n− 3)/2, and so on, and µ′1 = (n− 1)/2, µ′2 = (n− 3)/2, and so forth. Thislooks a lot like the character formula we derived in the first week; there are minor differences that correspond tosome rearrangement.
The dimension formula from part 3 is that if χ ∗ρ= (m′1, . . . , m′n), then
dimV(m1,...,mn )=
∏
i< j (m′i −m′j )
∏
i< j ( j − i)
=
∏
i< j (mi −m j + j − i)∏
i< j ( j − i).
(
Example 26.3. G = SO(5) is another example in which things are small enough to be made explicit. Recall thedramatis personæ that we have derived for SO(5):
•
T =
rotθ1 0 00 rotθ2 00 0 1
.
• X ∗(T ) =Z2.• Φ= {±e1± e2,±e1,±e2}.• C = {a1 > a2 > 0}, so C = {a1 ≥ a2 ≥ 0}.
48These absolute values require fixing a G-invariant inner product, which we can do; this is usually done more algebraically.57

• Thus, Φ+ = {e1+ e2, e1, e1− e2, e2}, and• W = S2 · {±1}2 (the roots can be flipped and two can be switched. This is the symmetry group of the picture
of the root system).• ρ= 3e1/2+ e2/2= (3/2,1/2).
The W -orbits on X ∗ are therefore {a ≥ b ≥ 0 | a, b ∈ Z} (since (a, b ) are up to orbit and up to sign). Denote theassociated representation Va,b , with character χ = (a, b ). This means that χ + ρ = (a + 3/2, b + 1/2), and thedimension formula is
dimVa,b =(a+ b + 2)(a− b + 1)(a+ 3/2)(b + 1/2)
3/2.
The denominator is the same as the numerator, but with a = b = 0. It’s not obvious, but this formula does end upbeing a positive integer.
Let x = e iθ1 and y = e iθ2 for concision, so
ρD = x3/2y1/2�
1− 1xy
�
�
1−yx
��
1− 1x
�
�
1− xy
�
,
and∑
wρ · sign(w) = x3/2y1/2− y3/2x1/2− x−3/2y1/2− x3/2y−1/2+ · · ·
and the two sides end up being equal, so∑
w∈W
w ∗ 1 sign(w) =D
after all. This means that the general character formula is
char(Va,b ) =xa+3/2y b+1/2+(the other seven W -orbits)
x3/2y1/2+(the other seven W -orbits).
This works for decomposing any representation into irreducible ones; for example, let V be the representation ofSO5 on Λ2C5.
First look at V restricted to the maximal torus; in GLn(C),
rotθ1rotθ2
1
∼
x−x
y−y
1
,
where ∼ denotes conjugacy; thus, those are its eigenvalues. Let { f1, . . . , fn} be a basis for C5; then, the character of Von the torus is
χV |T = xy +xy+
yx+
1xy+ x + x−1+ y + y−1+ 2.
These correspond, respectively, to the f1 ∧ f3-term, then f1 ∧ f4, then f3 ∧ f2, and so on. There are ten of these terms,since Λ2C5 is 10-dimensional.
This means that the α such that mα 6= 0 are (1,±1), (−1,±1), (±1,0), (0,±1), and (0,0), the last with multiplicity2. V must contain V(1,1), since we know the largest weight that will appear; then,
dim(V1,1) =4 · 1 · 5/2 · 3/2
7/2= 10= dimV ,
so V =V(1,1) must be irreducible.If we had instead found that V(1,1) (V , then we would have computed its character, subtracted it, and continued.
Here, V(a,b ) ⊆V ⊗(a−b )(1,0) ⊗V ⊗b
(1,1), where V(1,0) is the standard representation. This is a nice result: any representationof SO(5) is contained in a tensor product of small representations. But the right-hand side is huge; one has to extractthe left-hand side somehow. (
58

Proof of Theorem 26.1. For the rest of this lecture, we’ll begin the proof. Some things will be skipped over for time’ssake, but are the easier, computational parts.
Let V be irreducible, so that ⟨χV ,χV ⟩= 1, and start with the Weyl integration formula.∫
G|χV |
2 =1|W |
∫
T|χV ·D |
2.
D is a way of taking a square root, in some sense.On the torus T , χV must be a nonnegative linear combination of the irreducible representations:
χV |T =∑
α∈X ∗(T )
mαα,
where mα ≥ 0. Since χ is a class function, then mw·α = mα for any w ∈ W . We’ve also rigged w∗ such thatw ∗D = sign(w)D and
D =∑
α∈X ∗(T )
nαα,
with nα ∈Z (not always positive). wχV = χV , so it’s symmetric, but D is skew-symmetric.Finally, write
χV D =∑
α∈X ∗(T )
kαα.
Now, kα ∈Z, and this quantity is skew-symmetric, as kw∗α = kα sign(w).No α appearing in χV D (i.e. such that kα 6= 0) can be fixed by any nontrivial element of W , because W permutes
the chambers simply transitively, so if α is fixed by a nontrivial w ∈W , then it’s perpendicular to some root β. Thismeans that ⟨χV D ,χV D⟩ =
∑
k2α = |W | (since, as soon as one is in, all of the rest follow), but
∑
k2α ≥ |W |, with
equality only whenχV D =±
∑
w∈W
sign(w)w ∗α.
Thus, this is exactly the situation that happens: every irreducible character is of the form
χV |T =±∑
w∈W w ∗α sign(w)D
,
for some α ∈X ∗(T ), and where no nontrivial element of W fixes α.It remains to show the following.(1) We have to show that every α occurs.(2) It’ll be necessary to pin down the sign.(3) Finally, we’ll have to make the highest-weight calculation.
27. IRREDUCIBLE REPRESENTATIONS, PART II: 6/4/14
Recall that we’re trying to prove Theorem 26.1 from last time; we’ll keep the same notation.
Continuation of the proof of Theorem 26.1. Last time, we showed that if V is irreducible, then
χV =±∑
w ∗ψ sign(w)D
, (27.1)
where (W ,∗) acts freely on ψ (i.e. the stabilizer is {e}), and that every free (W ,∗)-orbit49 occurs in the formula (27.1)for some irreducible V , which follows because the characters span a dense subset of class functions: if not, thenthere’s some ψ0 ∈X ∗(T ) orthogonal to all of them, so
⟨χV D ,∑
w∈W
w ∗ψ0 sign(w)⟩= 0,
so the whole orbit is diagonal. This is a skew-symmetric function on the terms, but the span of χV D for irreduicbleV is dense in the skew-symmetric functions on L2(T ) (i.e. those that transform under W in the same way D does; inthe case of Un , these are literally skew-symmetric). This ends up leading to a contradiction.
49A free orbit means that if w ∗χ = χ , then w = e .59

Specifically, since ⟨χV ⟩ is dense in L2(G), then it’s sufficient to show that C (G)→ L2(T ) given by f 7→ f |T ·D hasdense image in the skew-symmetric functions in L2(T ). But this follows because (and there’s an argument to be madehere) the restriction C (G)�C (T )W is surjective, i.e. any W -invariant continuous function on T extends to G.
This follows, albeit non-obviously, from the fact that every element can be conjugated into T , so defining thisextension is easy (conjugate an arbitrary g ∈G into T , and then apply the function), but what’s trickier is provingit’s well-defined. This has to do with the conjugacy of maximal tori. The point is, every ψ has to occur, or therewouldn’t be enough characters to span the space of class functions.
So now we know that characters are parameterized by free (W ,∗)-orbits on X ∗, but the theorem dealt withthe usual action. This is finessed by revealing the bijections a : X ∗ ∩C → X ∗/W sending χ 7→W χ , and in theother direction b : X ∗ ∩C → X ∗/(W ,∗), sending χ 7→W ∗χ . This allows the ∗-action to go away. For want oftime, however, we’ll only prove the surjectivity of b (the rest are similar): that every free (W ,∗)-orbit has a uniquerepresentative in C .
For SU2, X ∗ =Z, and the ∗-action reflects about ρ=−1. The point is that every free orbit under (W ,∗) (i.e. not−1) has a representation in X ∗ ∩C =Z≥0, as does every orbit of W .
Pick a ψ ∈ X ∗ such that its (W ,∗)-orbit is free, so there exists a w such that w ∗ψ ∈−ρ+C . That is, since theWeyl group acts simply transitively on the set of chambers, so bring it to your favorite chamber. It can’t be on a wall,because then it would be fixed by that reflection, so not free, so it must be in −ρ+C . Here, −ρ is involved somehowin passing between C and C .
Let B be a basis for the root system associated to C , i.e. the minimal elements of Φ+. Then, for every α ∈ B ,⟨w ∗ψ,α∨⟩ = ⟨−ρ,α∨⟩+ ⟨λ,α∨⟩ for some λ ∈ C . Since ⟨λ,α∨⟩ > 0 because α ∈ Φ+, and we computed earlier that⟨−ρ,α∨⟩=−1, then |an g ∗w ∗ψ,α∨ ≥ 0. In other words, there exists a w such that ⟨w ∗ψ,α∨⟩ ≥ 0 for all α ∈ B ,but the set of λ such that ⟨λ,α⟩ ≥ 0 is exactly C , and in particular, w ∗ψ ∈C , so b is surjective.
a is trickier, because it’s not free, but the proof can be done fairly easily by looking at the classical root systems.Now, we know that the irreducible representations are parameterized by ψ ∈X ∗/W , with
ψ ∈C ←→ char(Vψ) =±∑
sign(w)w ∗ψD
.
The next step is to modify this formula into the one we want.Look at Vψ|T . It decomposes into a sum of irreducibles (on T ):
Vψ =⊕
θ∈X ∗mθθ,
and the characters form a sum.char(Vψ) =
∑
θ∈X ∗mθθ.
The θ ∈X ∗ such that mθ 6= 0 are called the weights of Vψ.
Let R=maxweights θ⟨θ,ρ⟩, and θ1, . . . ,θn be the maximizing θi , i.e.¬
θ j ,ρ¶
= R. We’ll keep track of what happensto these maximal weights in this formula; in particular,
((m1θ1+ · · ·+mnθn)+ (lower-order terms)) ·D =±(sign(w)w ∗ψ).But D has inverses of positive roots, which are lower terms: if α ∈ Φ+, then ⟨−α,ρ⟩< 0. Thus, the left-hand sidelooks like
m1θ1+ · · ·+mnθn + lower-order terms,and the right-hand side is simularly ψ plus lower-order terms (there is something to prove here). In particular, there isexactly one maximizing θ j , namely θ j =ψ, and mθ = 1, with sign +1 (in the character formula). This is significant.
So the goal is to make C act like C : the claim is that ⟨ψ,ρ⟩> ⟨w ∗ψ,ρ⟩ for w 6= e , or equivalently,
⟨ψ+ρ,ρ⟩> ⟨w(ψ+ρ),ρ⟩⇐⇒ ⟨ψ+ρ,ρ⟩>
w +ψ, w−1ρ�
⇐⇒
w +ρ,ρ−w−1ρ�
> 0.
But ψ+ρ ∈C (since ψ ∈C , and translation by ρ moves it into the interior). Furthermore, ρ is a sum of positiveroots and w−1 makes some of them negative, so ρ= w−1ρ is a sum of elements of Φ+, but by definition, ⟨C ,Φ+⟩> 0.
60

Now, in this version of the formula, it’s much clearer what actual representations look like. In particular, thetrivial representation is V1, with the trivial character ψ= 1. That is,
1=∑
sign(w)w ∗ 1D
⇐⇒ D =∑
sign(w)w ∗ 1.
This is not at all obvious combinatorially. We also have the final form of the character formula, which we proved lasttime.
Now let’s talk about maximality; inside Vψ, let Vψ[α] = {v ∈Vψ : t v = α(t )v for t ∈ T }, so that
V =⊕
α
Vψ[α].
This corresponds to picking out a single irreducible component of Vψ on the torus.We showed that dim(Vψ[α]) = mα, so dim(Vψ[ψ]) = 1. Additionally, ifβ ∈ Ψ, then gβVψ[α]⊆Vψ[α+β] (where,
you may recall, gβ is the β-root space in g= Lie(G)⊗C). The proof is identical to the proof that [gα,gβ]⊆ gα+β.
For X ∈ Lie(G), X acts on v ∈Vψ by X ·v = ddt e tX v . Therefore, in particular, let Vψ[ψ] =C · xψ, i.e. it’s spanned
by a single vector. Then, gβ · xψ = 0 when β ∈ Φ+. (Remember, in the case G = SU2, we had (13.2); then, xψ is sortof like one of the endpoints.) xψ is sometimes called the highest weight vector, and ψ the highest weight. This holdsin several senses; we have shown it extremizes the inner product with ρ.
Thus, ψ ∗β is not a weight, since its inner product would be greater than ⟨ψ,ρ⟩, which is maximal.Finally, if mα > 0, then I want to show that |α| ≤ |ψ|, with equality iff α ∈Wψ. Here, we have to reason a little
more with the Lie algebra: every weight α with mα 6= 0 is of the form
α=ψ−∑
β∈Φ+nββ,
going down the same way we did with mθθ, ultimately because Vψ is irreducible. Thus, Vψ = span(X1 · · ·Xm xψ)for X1, . . . ,Xn ∈ Lie(G). Without loss of generality, Xi ∈ gβ for β< 0 or in Lie(T )C (which requires an argument:commute something positive over to Xm xψ, which kills it, and then there are some Lie brackets left over). But thepoint is, this is Vψ[ψ−β1− · · ·−βm], so every weight can come from the top by going down.
With an invariant inner product, arrange the weights so that α maximizes ⟨α,α⟩. Then, replacing α by wα forw ∈W , we can assume α ∈C , and α=ψ−
∑
Φ+ nββ, and ψ ∈C too, and thus ψ= α+∑
Φ+ nββ. Thus,
⟨ψ,ψ⟩= ⟨α,α⟩+ ⟨∑
nββ,∑
nββ⟩+ cross terms
(which are positive in a positive chamber), so∑
nββ= 0, since ⟨α,α⟩ is maximal; thus, ψ= α again. �
To actually construct representations, generalize the following argument: the n-dimensional representation ofSU2 consists of polynomials of degree n on C2, i.e. sections of a certain line bundle on P1(C) (so not quite functions).Note that P1(C)∼= SU2/T ; in general, G/T has a structure as a complex manifold (for example, its real dimension iseven), and representations of G can be constructed as sections of a line bundle on this manifold.
61