Embed Size (px)
Citation preview

Gian Luca Mariottini, Univ. Texas at Arlington
“ To boldly go where no man has gone before! ”T.J. Kirk (from Star Trek)

CSE 4360/5364
Autonomous RobotsAutonomous Robots
University of Texas at Arlington
Dr. Gian Luca Mariottini, Ph.D.Department of Computer Science and Engineering
University of Texas at ArlingtonWEB : http://ranger.uta.edu/~gianluca
Class Schedule: Mon. & Wed., 1:00-2:20pm Office Hours: Mon. & Wed., 2:20-4:00pm
Gian Luca Mariottini, Univ. Texas at Arlington
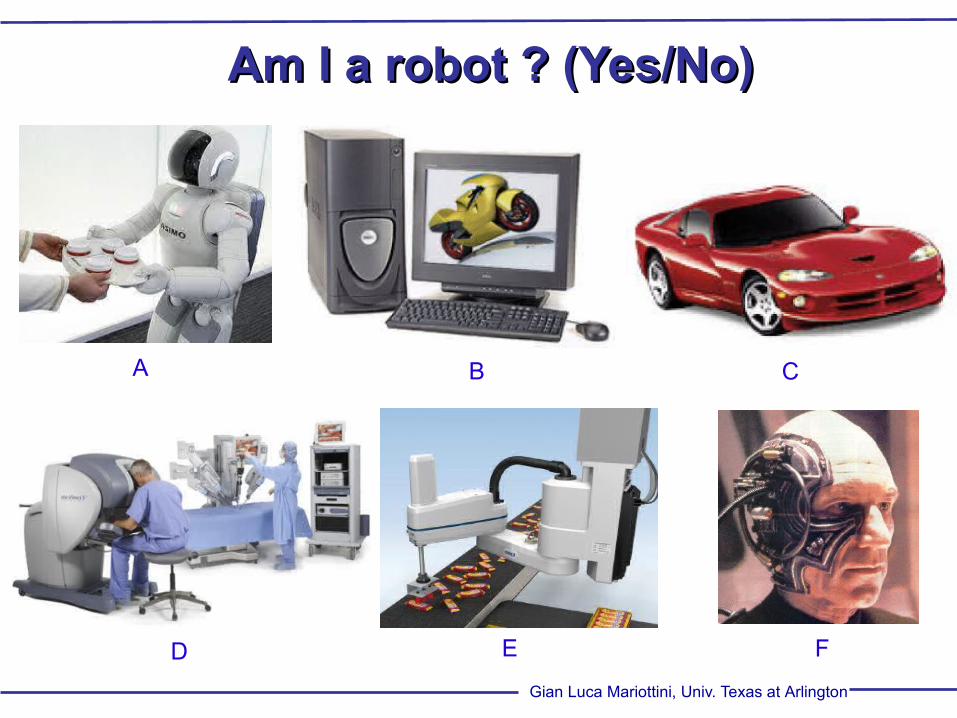
Am I a robot ? (Yes/No)Am I a robot ? (Yes/No)
A B C
D E F
Gian Luca Mariottini, Univ. Texas at Arlington
Application domains of RoboticsApplication domains of RoboticsMore than you can imagine !
extreme environments space underwater
medical robotics assistive rehabilitative surgical
home cleaning
agriculture
lawn mowing
food industry
• mine exploration
de-mining
• civil and naval construction
• automatic refueling
• museum guide
• fire fighting
• inspection and surveillance
• emergency rescue
• entertainment
• humanoids
Robots are exciting for what they do...... but, more than that, for how they work!
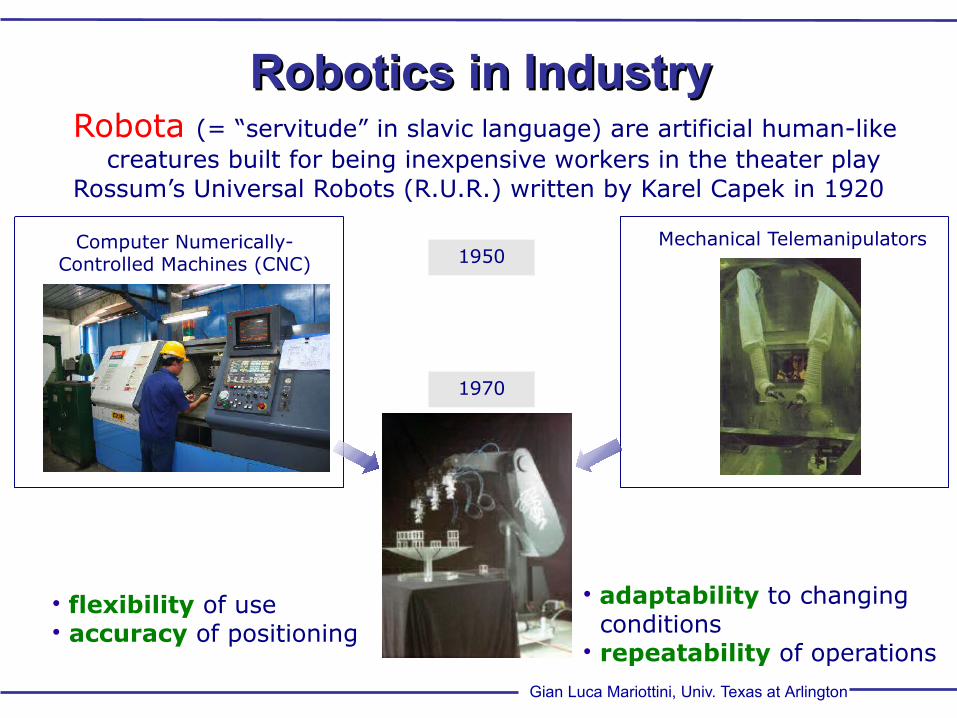
Robotics in IndustryRobotics in Industry
Gian Luca Mariottini, Univ. Texas at Arlington
Computer Numerically-Controlled Machines (CNC)
Robota (= “servitude” in slavic language) are artificial human-like creatures built for being inexpensive workers in the theater play Rossum’s Universal Robots (R.U.R.) written by Karel Capek in 1920
Mechanical Telemanipulators1950
1970
• flexibility of use• accuracy of positioning
• adaptability to changing conditions• repeatability of operations
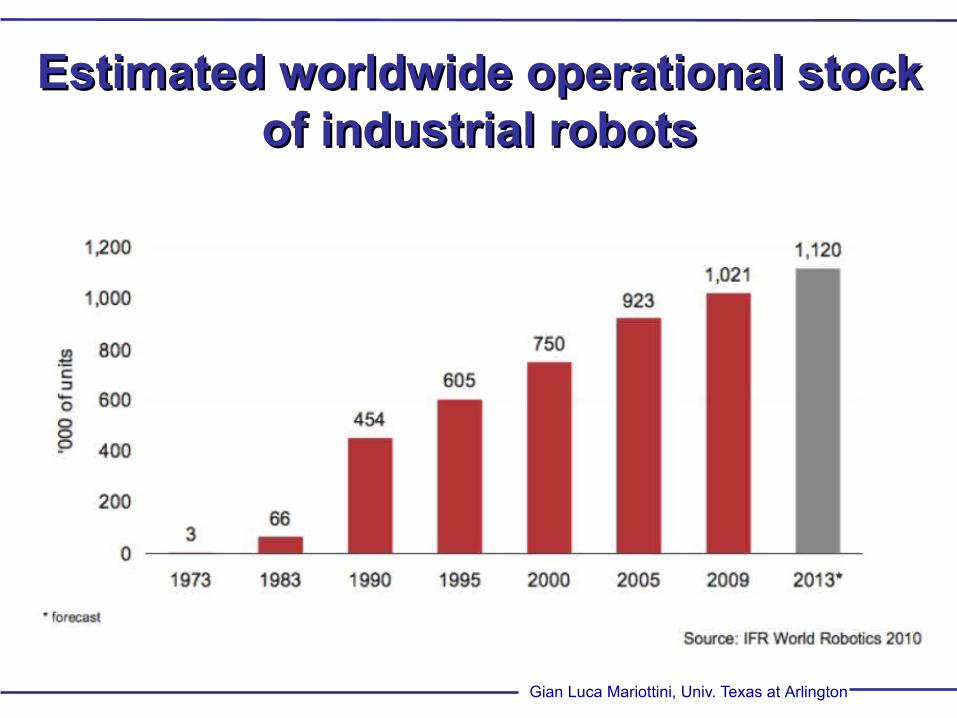
Estimated worldwide operational stock Estimated worldwide operational stock of industrial robotsof industrial robots
Gian Luca Mariottini, Univ. Texas at Arlington
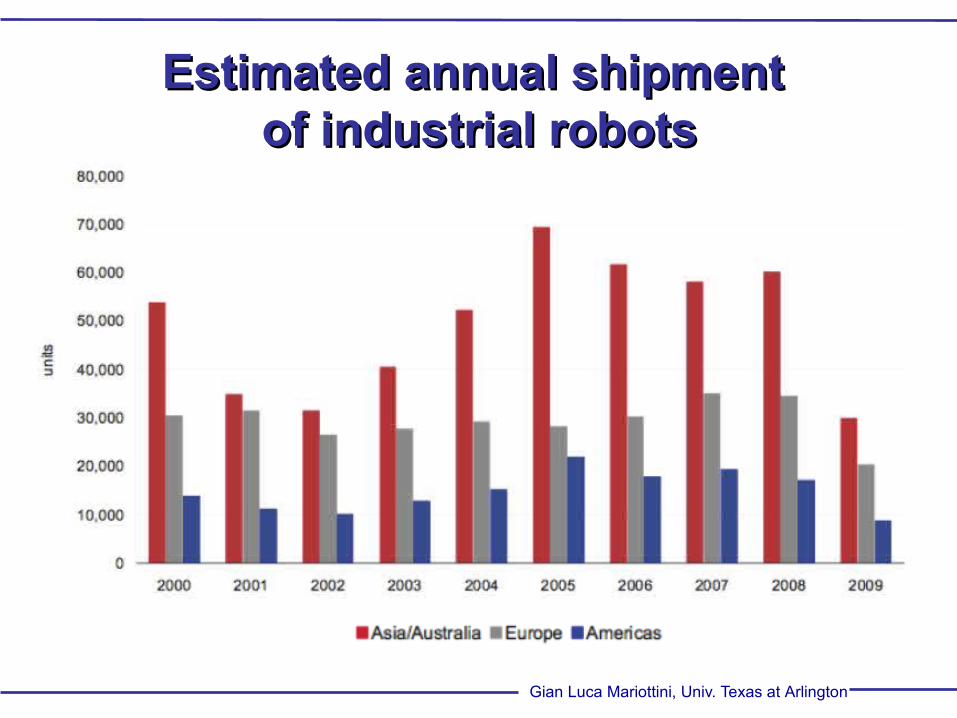
Estimated annual shipment Estimated annual shipment of industrial robotsof industrial robots
Gian Luca Mariottini, Univ. Texas at Arlington
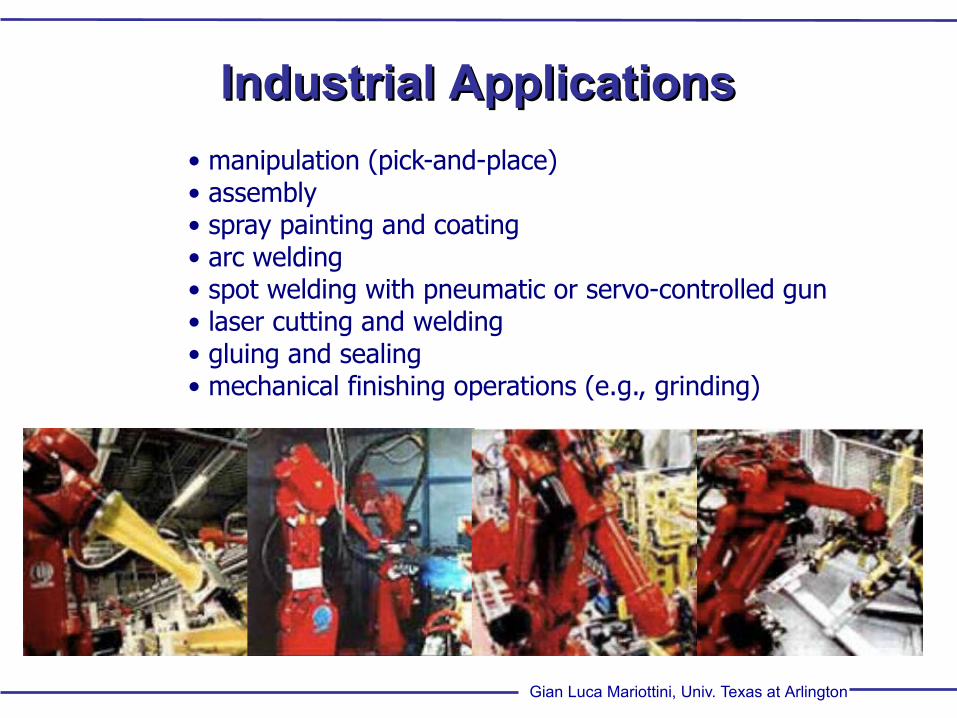
Industrial ApplicationsIndustrial Applications
Gian Luca Mariottini, Univ. Texas at Arlington
• manipulation (pick-and-place)• assembly• spray painting and coating• arc welding• spot welding with pneumatic or servo-controlled gun• laser cutting and welding• gluing and sealing• mechanical finishing operations (e.g., grinding)
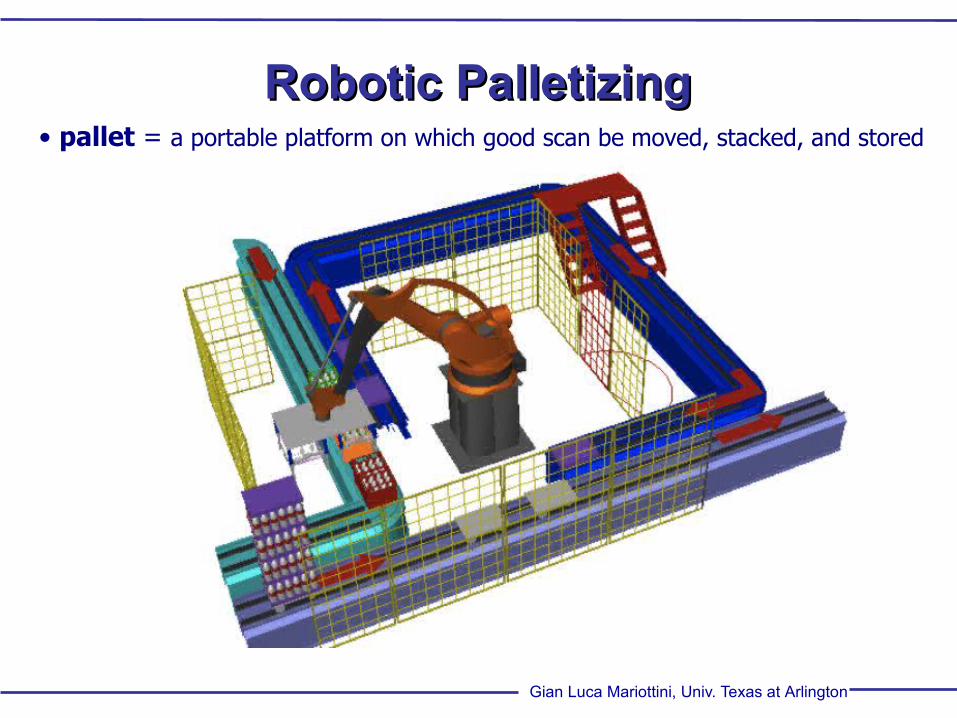
Robotic PalletizingRobotic Palletizing
Gian Luca Mariottini, Univ. Texas at Arlington
• pallet = a portable platform on which good scan be moved, stacked, and stored

Gian Luca Mariottini, Univ. Texas at Arlington
Automatic RefuelingAutomatic Refueling
Smart Pump refueler system (ISE, USA)
Oscar robot (France)
Gian Luca Mariottini, Univ. Texas at Arlington
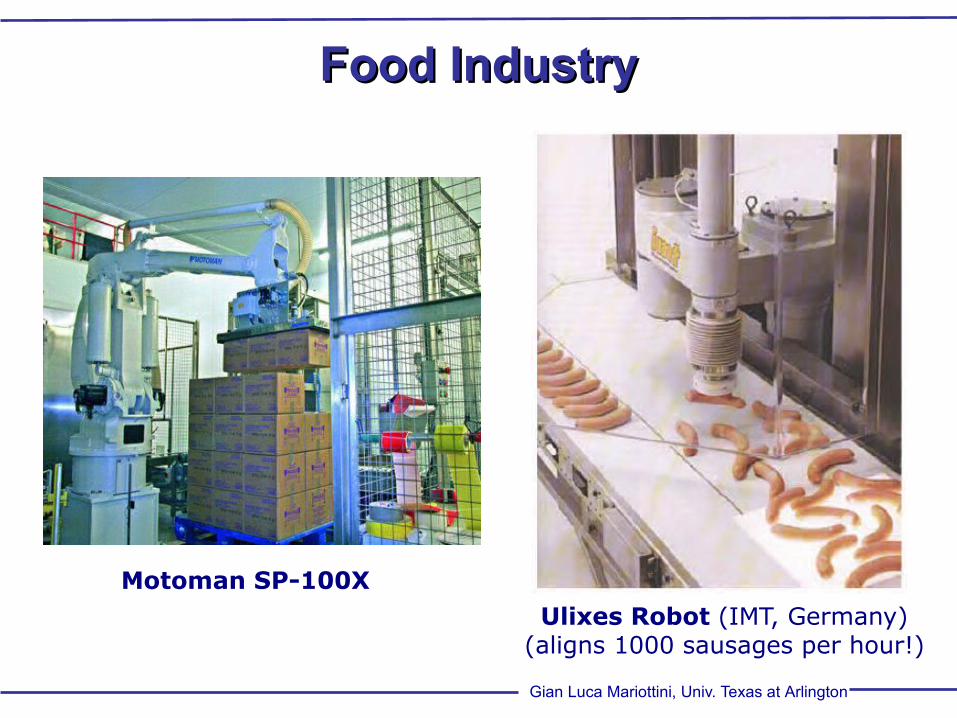
Food IndustryFood Industry
Motoman SP-100X Ulixes Robot (IMT, Germany)(aligns 1000 sausages per hour!)
Gian Luca Mariottini, Univ. Texas at Arlington
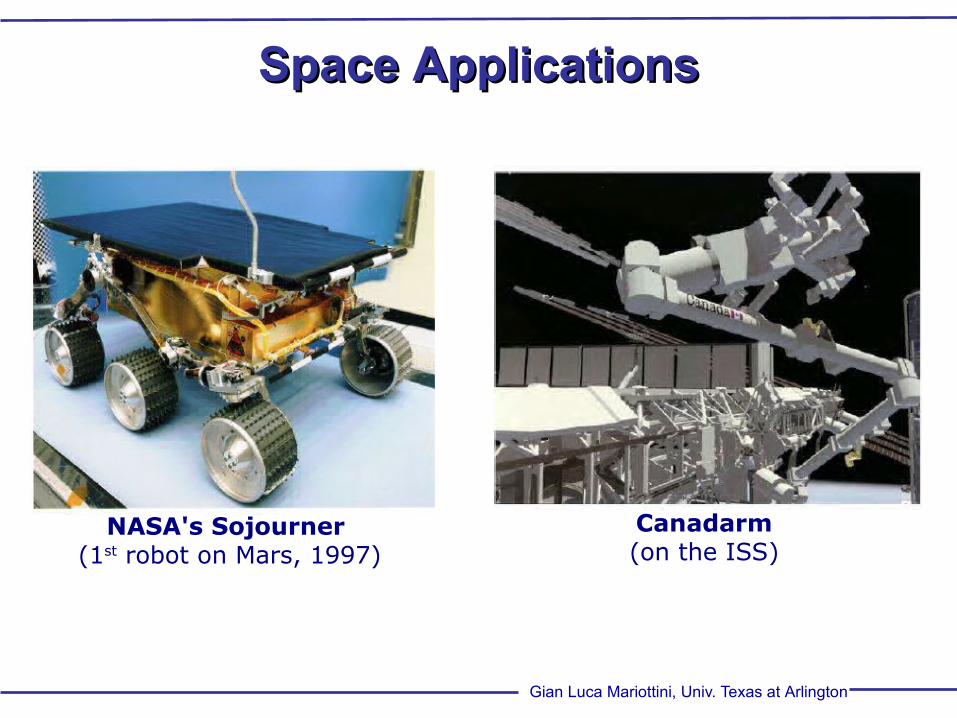
Space ApplicationsSpace Applications
NASA's Sojourner (1st robot on Mars, 1997)
Canadarm(on the ISS)
Gian Luca Mariottini, Univ. Texas at Arlington
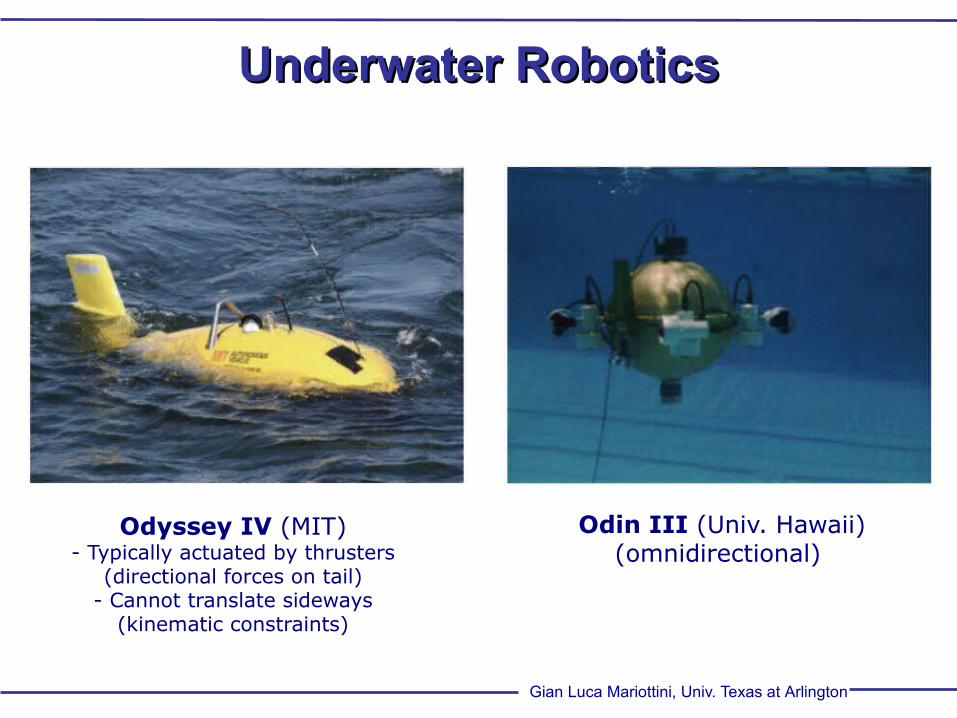
Underwater RoboticsUnderwater Robotics
Odyssey IV (MIT)- Typically actuated by thrusters
(directional forces on tail)- Cannot translate sideways
(kinematic constraints)
Odin III (Univ. Hawaii)(omnidirectional)
Gian Luca Mariottini, Univ. Texas at Arlington
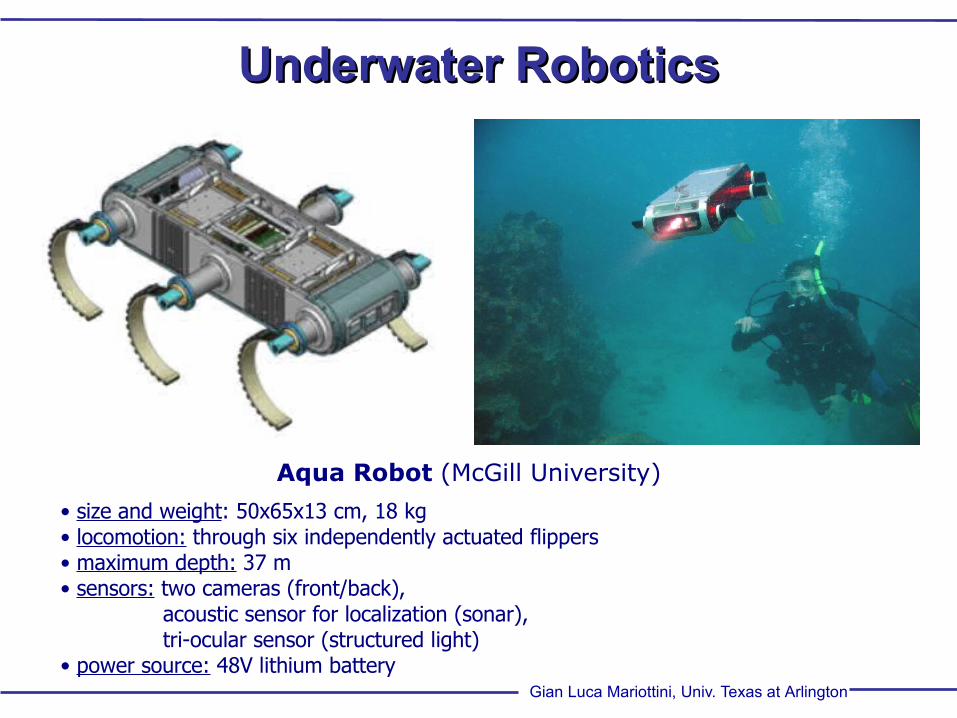
Underwater RoboticsUnderwater Robotics
Aqua Robot (McGill University)
• size and weight: 50x65x13 cm, 18 kg• locomotion: through six independently actuated flippers• maximum depth: 37 m• sensors: two cameras (front/back),
acoustic sensor for localization (sonar), tri-ocular sensor (structured light)
• power source: 48V lithium battery

Gian Luca Mariottini, Univ. Texas at Arlington
DARPA ChallengeDARPA Challenge
Blue Team (U.Berkley, TA&M) Carnegie Mellon

Gian Luca Mariottini, Univ. Texas at Arlington
Humanoid RobotsHumanoid Robots
NAO (Aldebaran Robotics) Justin Robot (DLR, GErmany)
Gian Luca Mariottini, Univ. Texas at Arlington
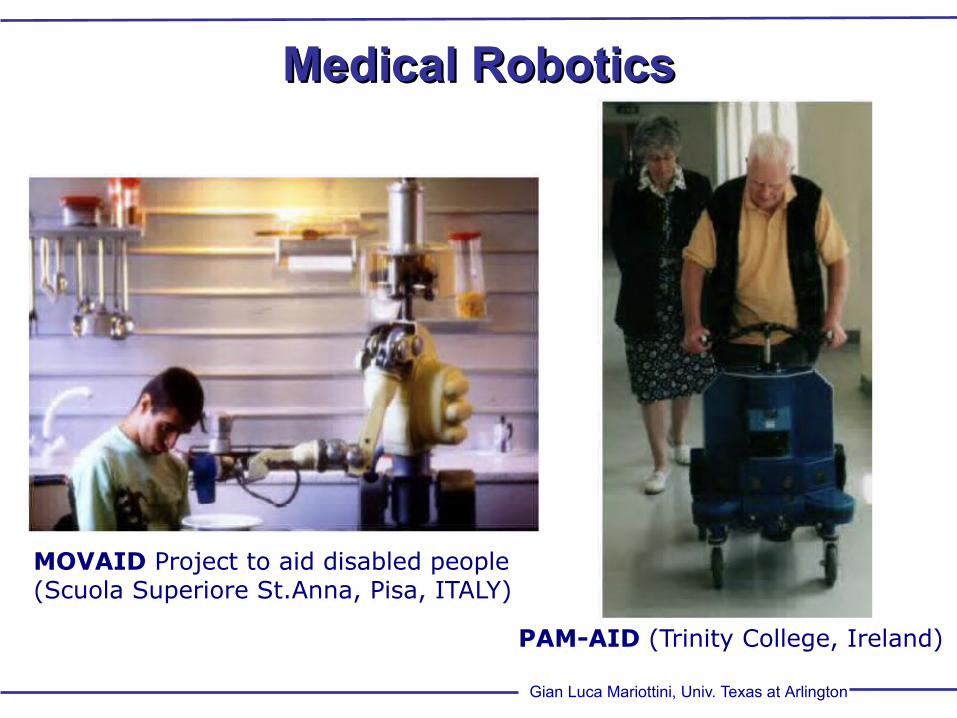
Medical RoboticsMedical Robotics
MOVAID Project to aid disabled people (Scuola Superiore St.Anna, Pisa, ITALY)
PAM-AID (Trinity College, Ireland)

Gian Luca Mariottini, Univ. Texas at Arlington
Autonomously Robotic LaparoscopyAutonomously Robotic Laparoscopy
Gian Luca Mariottini, Univ. Texas at Arlington
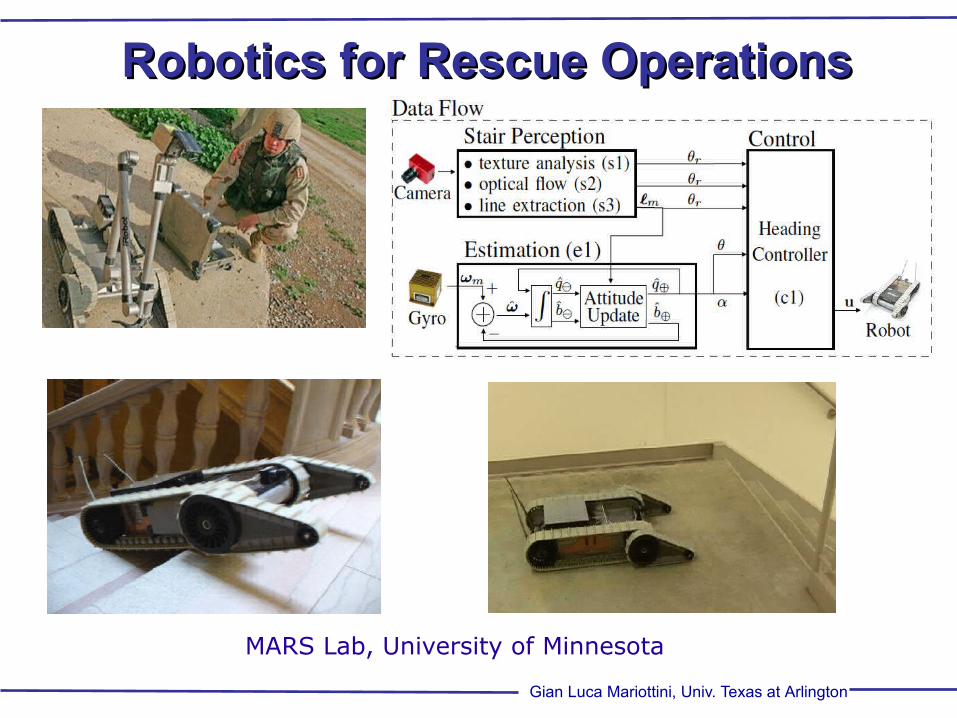
Robotics for Rescue OperationsRobotics for Rescue Operations
MARS Lab, University of Minnesota

Gian Luca Mariottini, Univ. Texas at Arlington
Mine ExplorationMine Exploration
Groundhog @ Carnegie Mellon

De-miningDe-mining
Gian Luca Mariottini, Univ. Texas at Arlington
Tele-operated system on tracks used by the police for bomb disposal
PEMEX (EPFL, Lausanne)(lightweight robot with oscillating head for mine detection)

Assistive RoboticsAssistive Robotics
Gian Luca Mariottini, Univ. Texas at Arlington
Omnivision sensing 3-D object locations Robot control
Courtesy from Charlie Kemp, director of the Healthcare Robotics Center at Georgia Tech;

Home CleaningHome Cleaning
Gian Luca Mariottini, Univ. Texas at Arlington
Roomba (iRobot) Orazio (myRobot)
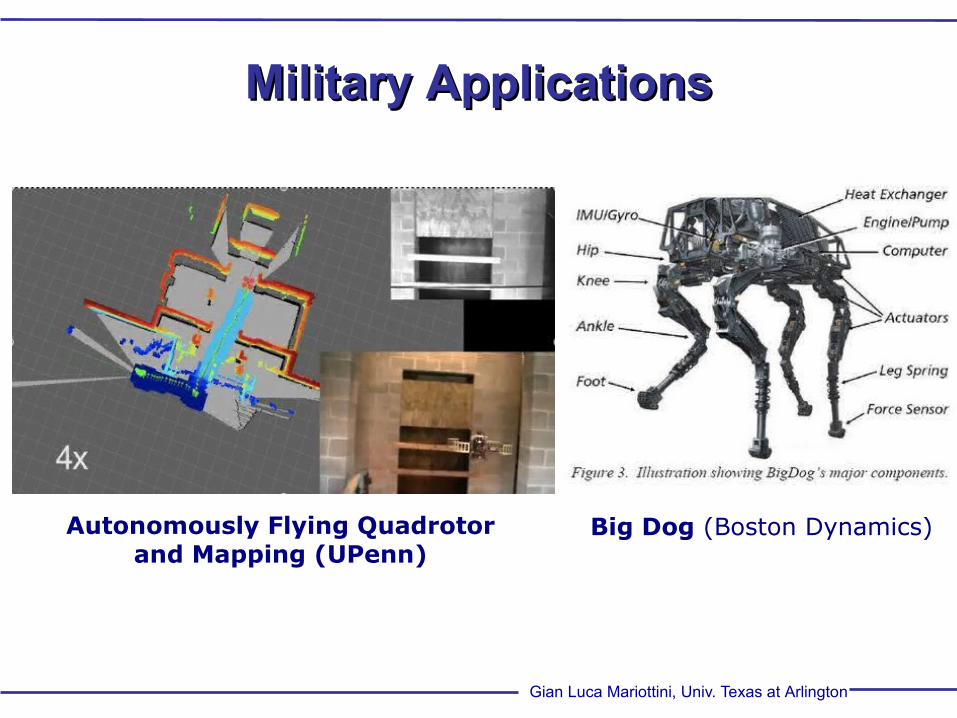
Military ApplicationsMilitary Applications
Gian Luca Mariottini, Univ. Texas at Arlington
Autonomously Flying Quadrotor and Mapping (UPenn)
Big Dog (Boston Dynamics)

Gian Luca Mariottini, Univ. Texas at Arlington
Multi-robot Formation ControlMulti-robot Formation Control
Team of Robots
Formation Control

Medical Robotics: Hospital & NursingMedical Robotics: Hospital & Nursing
Gian Luca Mariottini, Univ. Texas at Arlington
HELPmate robot- works in hospitals as auxiliary
personnel
Care-o-bot
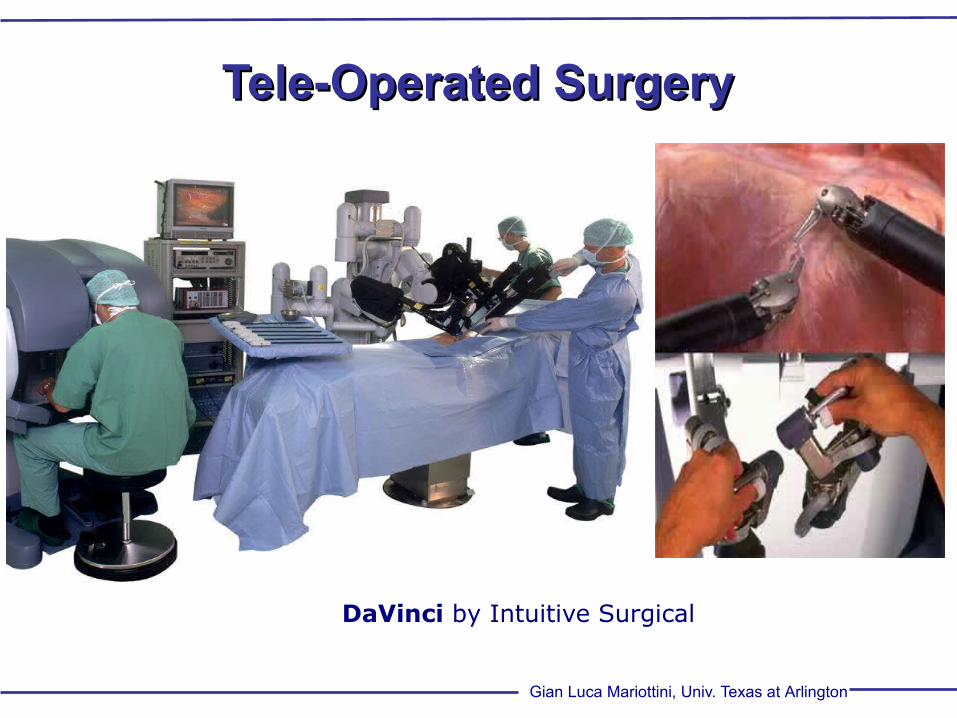
Tele-Operated SurgeryTele-Operated Surgery
Gian Luca Mariottini, Univ. Texas at Arlington
DaVinci by Intuitive Surgical
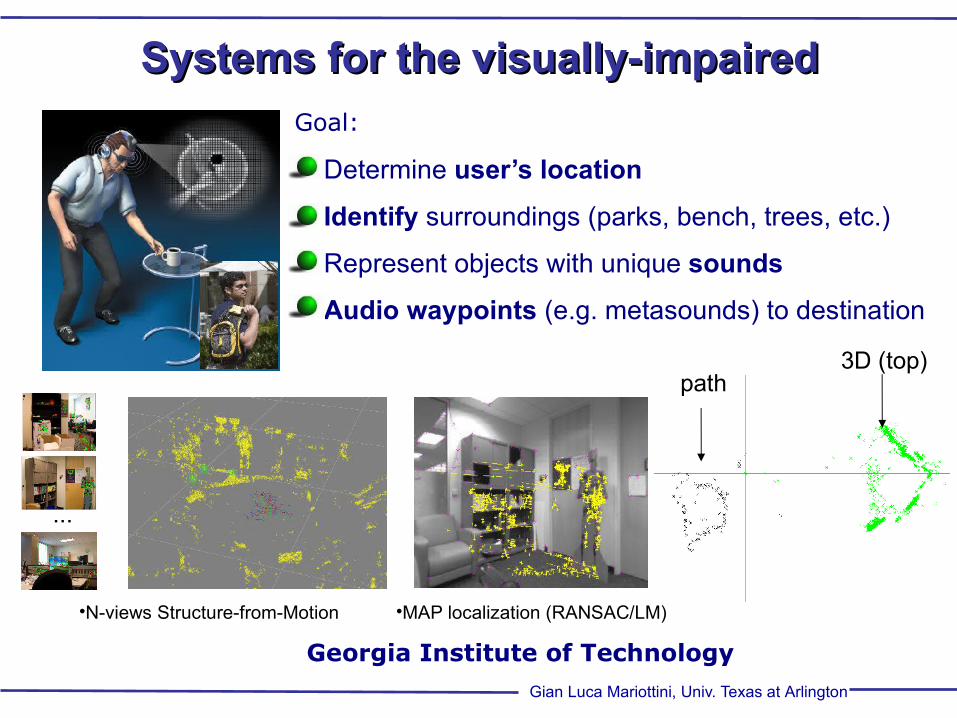
Systems for the visually-impairedSystems for the visually-impaired
• Determine user’s location• Identify surroundings (parks, bench, trees, etc.)
• Represent objects with unique sounds• Audio waypoints (e.g. metasounds) to destination
path3D (top)
...
•MAP localization (RANSAC/LM)•N-views Structure-from-Motion
Goal:
Gian Luca Mariottini, Univ. Texas at Arlington
Georgia Institute of Technology

Key Problems in RoboticsKey Problems in Robotics
Gian Luca Mariottini, Univ. Texas at Arlington
a) Who am I ?
c) Where should I go ?d) How do I get there ?
b) Where am I ?
a) Requires study of :- robotic structures; - robotic sensors;- robotic actuators
b) kinematics and localization
c) task planning/control
d) motion planning / motion control
How am I supposed to get there
How do I actually get there
Gian Luca Mariottini, Univ. Texas at Arlington
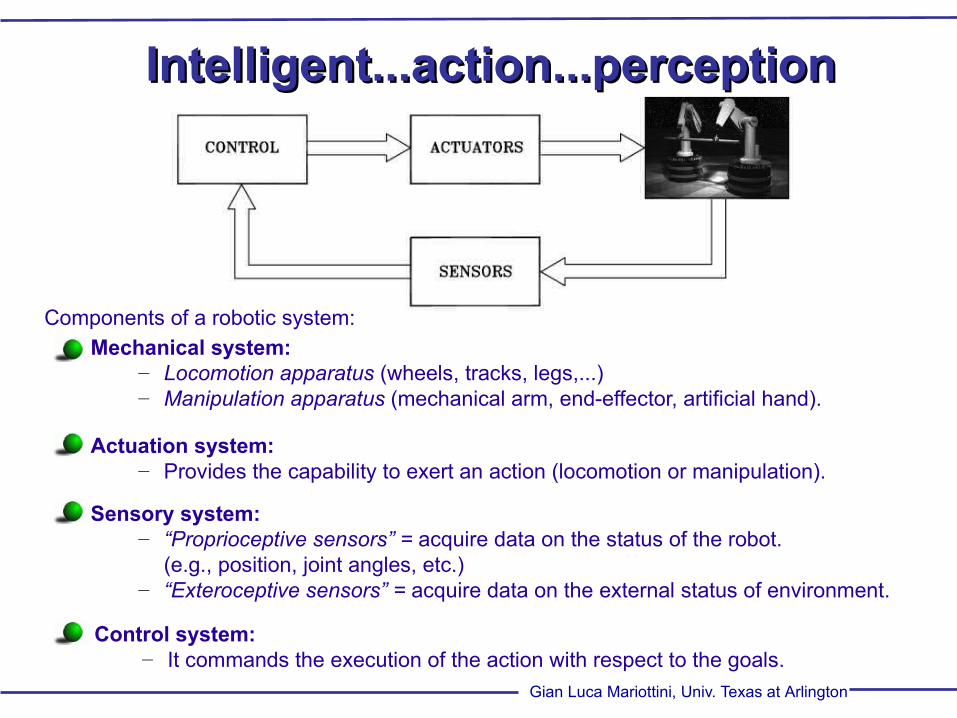
Intelligent...action...perceptionIntelligent...action...perception
Actuation system: – Provides the capability to exert an action (locomotion or manipulation).
Sensory system: – “Proprioceptive sensors” = acquire data on the status of the robot.
(e.g., position, joint angles, etc.)– “Exteroceptive sensors” = acquire data on the external status of environment.
Control system: – It commands the execution of the action with respect to the goals.
Components of a robotic system:Mechanical system:
– Locomotion apparatus (wheels, tracks, legs,...)– Manipulation apparatus (mechanical arm, end-effector, artificial hand).

...and applied to our scenario !...and applied to our scenario !
Gian Luca Mariottini, Univ. Texas at Arlington
Gian Luca Mariottini, Univ. Texas at Arlington
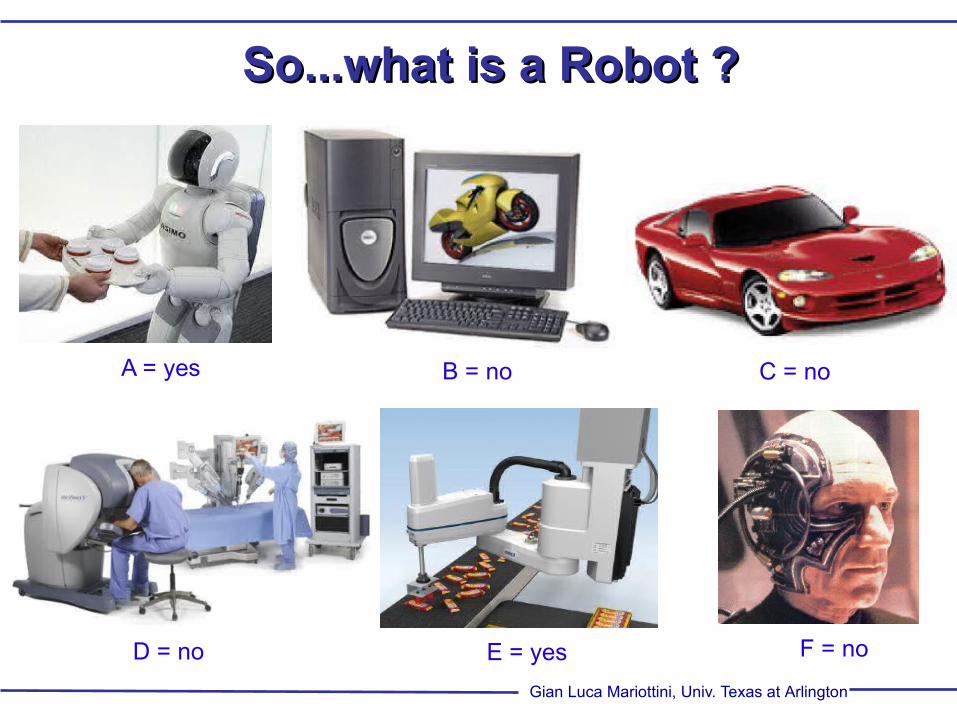
So...what is a Robot ?So...what is a Robot ?
A = yes B = no C = no
D = no E = yes F = no

Course ContentCourse Content
Gian Luca Mariottini, Univ. Texas at Arlington
• Intro to Robot Systems• Robot Kinematics• Inverse Kinematics• Robot Jacobians• Linear Control of Manipulators
– 1st Homework Assignment
• Sensors for Robotics• Mobile Robots• Robot Motion Planning• Trajectory Generation and Tracking
– 1st Project– 2nd Homework Assignment
• Probabilistic Approaches to Robot Localization• Kalman Filter (KF) and Extended-KF• Robot Localization and Mapping• Computer Vision in Robotics• Adaptation and Learning
– 3rd Homework Assignment– Final Project
(please note that these course topics are preliminary and might undergo slight changes)
- Robot Modeling- Robot Control
- Robot Sensing- Motion Panning
- Robot Localization- Advanced apps.
Course Prerequisites, Goals and OutcomesCourse Prerequisites, Goals and Outcomes
Gian Luca Mariottini, Univ. Texas at Arlington
Prerequisites include CSE 2320 and CSE 3442.MATLAB programming experience is strongly recommended.C/C++ programming experience can be beneficial for the final project.Feel free to contact the advisor in case you have specific questions.
CSE 4360/5364 is designed to:• Introduce the student to fundamentals of robotics, robot control, and sensing.• Explore the mathematical/algebraic foundations of robot kinematics, control and localization.• Explore and familiarize with robot planning and navigation techniques.
Upon successful completion of the course, each student will be able to:• Recognize the features and peculiarities of different robotic devices.• Understand rigid body kinematics and relationships between 3-D refer. frames.• Describe direct and inverse kinematics.• Compare the characteristics of different sensing devices (encoders, pinhole and stereo cameras, etc.).• Understand and implement motion planning algorithms.• Understand and discuss different algorithms for robot localization and mapping.

Gian Luca Mariottini, Univ. Texas at Arlington
Course TextCourse TextThere is no required textbook for this course. However, selected parts of other textbooks (see list below) will be used as part of the course readings. Copies of these material will be put on reserve in the Science and Engineering Library.
-- B. Siciliano, L. Sciavicco, L. Villani, G. Oriolo "Robotics: Modelling, Planning and Control", 3rd Edition, Springer,09
-- John J. Craig "Introduction to Robotics: Mechanics and Control", Addison
Wesley,2004
-- Jean-Claude Latombe "Robot Motion Planning", Kluwer Academic Publishers
-- R. Cipolla "Computer Vision and Robotics", Cambridge University, UK
(on-line course material)
-- Y. Ma, S. Soatto, J. Kosecka, S. Sastry "An Invitation to 3-D Vision. From Images to Geometric Models",
Springer 2003
Gian Luca Mariottini, Univ. Texas at Arlington
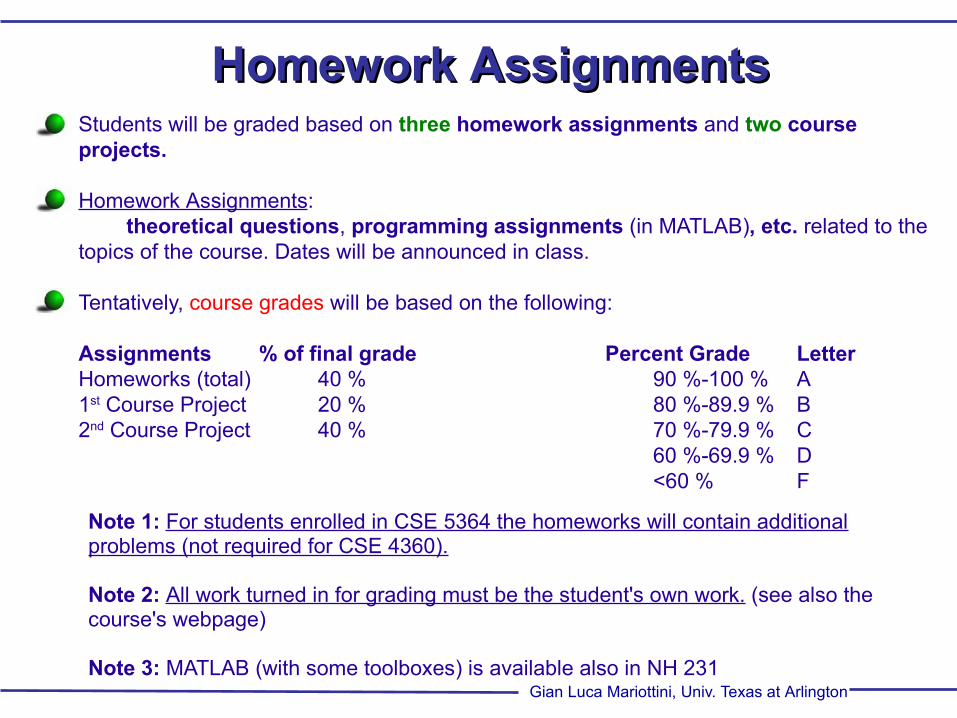
Homework AssignmentsHomework AssignmentsStudents will be graded based on three homework assignments and two course projects.
Homework Assignments: theoretical questions, programming assignments (in MATLAB), etc. related to the
topics of the course. Dates will be announced in class.
Tentatively, course grades will be based on the following:
Assignments % of final grade Percent Grade LetterHomeworks (total) 40 % 90 %-100 % A1st Course Project 20 % 80 %-89.9 % B2nd Course Project 40 % 70 %-79.9 % C
60 %-69.9 % D<60 % F
Note 1: For students enrolled in CSE 5364 the homeworks will contain additional problems (not required for CSE 4360).
Note 2: All work turned in for grading must be the student's own work. (see also the course's webpage)
Note 3: MATLAB (with some toolboxes) is available also in NH 231
Gian Luca Mariottini, Univ. Texas at Arlington
Course ProjectsCourse Projects1 st Course project : designing and implementing a particular algorithm related to topics studied in the course (assigned by the instructor).
Final project : Designing and implementing a final project related to course topics and chosen by the student or proposed by the instructor. Abstract submission is mandatory before the deadline (to be announced in class).
The course project can be done either individually or in a team (~max 2 students). RTL will be made available.
Students will report their findings in a research report, and will present in-class their design and demo (dates will be announced)
Gian Luca Mariottini, Univ. Texas at Arlington
ReferencesReferences
A. De Luca – Notes from “Robotics 1”, University of Rome, “La Sapienza”, 2010V. Kumar, G. Bekey and Y. Zheng – Ch.5 “Industrial, Personal and Service Robots”, 2010
B. Siciliano – Robotics, Springer 2009 (Ch.1)