Embed Size (px)
Citation preview

TTooppiicc RReesseeaarrcchh
Integration of Optical and Radar Data to Characterize Land Use of Pollino
National Park
SScchhoollaarrsshhiipp HHoollddeerr
LLiicc.. BBaayyaallaa MMaarrttíínn IIggnnaacciioo.. Master in Emergency Early Warning and Response Space Applications
Mario Gulich Space Studies Institute.
National Commission on Space Activities (CONAE)
Córdoba, Argentina.
TTuuttoorr
Dra. Rosa Maria Cavalli Laboratorio Aereo di Ricerche Ambientali (LARA)
Istituto Inquinamento Atmosferico (IIA)
Consiglio Nazionale delle Ricerche (CNR)
Roma, Italia.
Final Report
Tutor Sign:………………………………………………………………….
SScchhoollaarrsshhiipp HHoollddeerr SSiiggnn::………………………………………………………………………………………………....
1
INDEX
1. ABSTRACT 3
2. DOCUMENT SCOPE 4
3. OBJETIVE 4
4. INTRODUCTION 5
5. BACKGROUND 7
5.1. SYSTHEMATIC APERTURE RADAR (SAR) 7
5.2. Wavelength 8
5.3. Phase 8
5.4. Polarization 9
5.5. Incidence Angle 10
5.6. Scattering Mechanisms 10
5.6.1. Surface and Scattering 10
5.6.2. Double Bounce 11
5.6.3. Penetration 11
5.6.4. Speckle 12
5.6.5. Data Statistics 13
5.6.6. Geometry 13
6. INTERFEROTRETRIC IMAGES 14
6.1. Statistic of the Return 14
6.2. Coherence 15
7. STUDY AREA 17
8. SATELLITE DATA 19
8.1. OPTICAL DATA: GEO-EYE 1 19
8.2. RADAR DATA: COSMO SkyMed 20

2
8.3. DIGITAL ELEVATION MODEL 20
9. METHODS 21
9.1. MULTISPECTRAL IMAGE CLASSIFICATION METHODS 21
9.1.1. Identification of Test Sites 21
9.1.2. Classification of the Very High Resolution Geo-eye Image 22
9.1.2.1.Clasification Pixels Oriented (NDVI thereshold) 23
9.1.2.2.Classification Oriented Object (Segmentation) 24
9.1.2.3.ISODATA Classification with Independent Compenent Analysis 25
9.2. VHR OPTICAL CLASSIFICATION RESULTS 26
9.2.1. Spectral Classification 26
9.2.2. Accuracy Evaluation 27
9.2.3. Analisys Multitemporal between Geo-eye and MIVIS images 29
9.4. VHR RADAR RESULTS 34
9.4.1. Coherence Image Interpretation 34
9.4.2. Integration VHR Optical and Radar Data 35
10. CONCLUSION 37
11. REFERENCES 38
APPENDIX 1_ CORINE Land Cover 2000 41
APPENDIX 2 _ Presentation 44

3
1. ABSTRACT
This study was made on the Basilicata side of Pollino National Park of Pollino National Park, in
the framework of Airborne Laboratory of Environmental Research (LARA) by the availability of
new data set of very high resolution imagery. Therefore, the research proposes was made a
approach of the optical and radar data for land use and land cover mapping.
In this study the land use and cover mapping have been retrieved from the multispectral infrared
visible Geo-eye sensor support by Cosmos SkyMed Spotlight and Himage radar imagery over
the Pollino National Park.
The result over Geo-eye very high resolution data (VHR) allows discriminate with a good
accuracy (up to 2nd
CLC level) the following classes: water course and river bed, bare soil,
woodland and meadow-grassland with a 85 % of averall acurancy and 0.78 of Kappa coefficient.
This methodology can quickly highlight the possible integration between very high resolution
optical and radar data.
4
2. DOCUMENT SCOPE
The aim of the report is to describe the research developed, to characterize land use of Pollino
National Park by integration of optical and radar data in the framework of the SIASGE (Italo-
Argentino System for Emergency Management) scholarship program, managed between CONAE
(Comision Nacional de Actividades Espaciales de Argentina) and ASI (Agenzia Spaziale
Italiana). Tasks were carried out in the Airborne Laboratory of Environmental Research (LARA)
department of the Institute of Atmospheric Pollution (IIA), National Research Council (CNR),
from February up to July 2010 in Rome, Italy.
3. OBJETIVE
• to explore the potential of VHR remote sensing data to support natural vegetation
monitoring.
• to start up an integrated approach to derive Land Use maps by VHR optical and radar
satellite data.
5
4. INTRODUCTION
Over the years, applications of remote sensing have emerged in agriculture, urban planning,
disaster mitigation and monitoring, forestry, hydrology, and operational meteorology among
others. The traditional sources of coarse (>250 m) and moderate resolution (10–250 m) satellite
imagery within the United States have been federal agencies such as NASA and the National
Oceanic and Atmospheric Administration (NOAA). Several commercial companies (e.g. Space
Imaging and Digital Globe) are now providing high spatial resolution (<10 m) satellite data.
With this combination of data types, users have a variety of options to choose the data that best
suits their needs and budget.
Time series of satellite data have long been used to study land-cover changes at global to
regional scales. One of the major challenges is to distinguish between changes linked to
interannual climate variability and land-cover changes induced by anthropogenic processes.
These climatic, geomorphic and anthropogenic processes interact in a complex and dynamic
way, and lead to a wide range of ecosystem responses at different scales (Lambin et al., 2003).
Both a quantification of the magnitude of change as well as a characterization of the change
processes are required to unravel the driving forces of change and their effects on land cover
dynamics (Pan and Bilsborrow, 2005).
However, little is known about the interactions between human land use and the short-term
variability of vegetation activity at regional scales. Until now, the hierarchical organization of
ecosystems, human activities, and their interactions at different levels, from the landscape to the
region, has largely been ignored in remote sensing studies. Processes at these different levels are
interdependent (Paruelo et al., 2001). Factors operating at one level of the hierarchy might
influence processes at a higher or lower level, and should thus be analyzed simultaneously
(Serneels et al., 2007).
As we known, land cover classification and dynamics change are usually performed using the
traditional optical data, although it can suffer from limitations, especially where frequent cloud

6
cover occurs. The increased availability of spaceborne radar imagery offers additional means for
assessing the land use and monitoring their dynamics.
Compared to optical sensors, SAR data does not suffer from the limitations of cloud cover and
darkness and is essentially an all-weather system. The coherence information of ERS SAR
tandem pairs has been successfully used by previous workers for landuse/landcover mapping
(Chatterjee et al., 2002). Moreover, spectral overlaps between fire scars and terrain shadows,
water bodies, and urban areas create substantial difficulties in separating and discriminating land
use classes (Zhang et al., 2000).
In the past few years, the use of SAR remote sensing satellites, such as ERS-1/2, RASARSAT
and JERS-1, has been widely demonstrated in several studies (Strozzi et al, 2000; Engdahl &
Hyyppä, 2003) for land use and urban monitoring application. It has been shown that
multitemporal analysis of SAR data allows monitoring changes in land cover using the
backscatter change intensity.
In this context, the Italian COSMO/SkyMed mission can represent a precious source of
information thanks to the high spatial resolution of the images it acquires, to the very short
revisit time and to the low sensitivity, typical of synthetic aperture radar (SAR) data, to
atmospheric and Sun-illumination conditions. The main novelties of the system are represented
by the possibility to exploit satellite data to generate estimates of soil saturation, at different
space and time scales, to observe the state of rivers and water bodies, and to detect flooded areas,
in any weather and illumination condition. To this end, remote sensing data analysis plays a
crucial and pervasive role in the system; as such data are involved in several processing phases,
i.e., the generation of land-use/land-cover maps by image classification methods, or the
production of change maps by change-detection techniques.
The aims of this study were to explore the potential of VHR remote sensing data to support
natural vegetation monitoring and to start up an integrated approach to derive Land Use maps by
VHR optical and radar satellite data on fragmented landscape of Basilicata area, Italy.

7
5. BACKGROUND
5.1. SYSTHEMATIC APERTURE RADAR (SAR)
To provide a simple definition, Synthetic Aperture Radar (SAR) is a microwave imaging system
that has cloud-penetrating capabilities because it uses microwaves, and it has day and night
operational capabilities because it is an active system.
The imaging radar system composed by an antenna mounted on a platform transmits a radar
signal in a side-looking direction towards the Earth’s surface. The reflected signal, known as the
echo, is backscattered from the surface and received a fraction of a second later at the same
antenna (monostatic radar).
The principle of aperture means the opening used to collect the reflected energy that is used to
form an image (antenna). For RAR systems (real aperture radar) only the amplitude of each echo
return is measured and processed.
The especial resolution of RAR is primarily determined by the size of the antenna used; in fact,
the large the antenna means better spatial resolution. Other determining factors include the pulse
duration (τ), and the antenna bandwidth.
The range resolution is defined as
(1)
Where is the speed of light. The azimuth resolution in defined as
(2)
Where is the antenna length, the distance antenna-abject, and the wavelength.
For systems where the antenna beam width is controlled by the physical length of the antenna,
typical resolutions are in the order of several kilometres. The range resolution of a pulsed radar
system is limited fundamentally by the bandwidth of the transmitted pulse. A wide bandwidth
can be achieved by a short duration pulse.
8
However, the shorter pulse, the lower the transmitted energy and the poorer radiometric
resolution. To preserve the radiometric resolution, SAR systems generate a long pulse with a
linear frequency modulation (or chirp).
The “Interferometric configuration” (Interferometric SAR or InSAR), allows accurate
measurements of the radiation travel path because it is coherent. Measurements of travel path
variations as a function of the satellite position and time of acquisition allow generation of
Digital Elevation Models (DEM) and measurement of contimetric surface deformations of the
terrain.
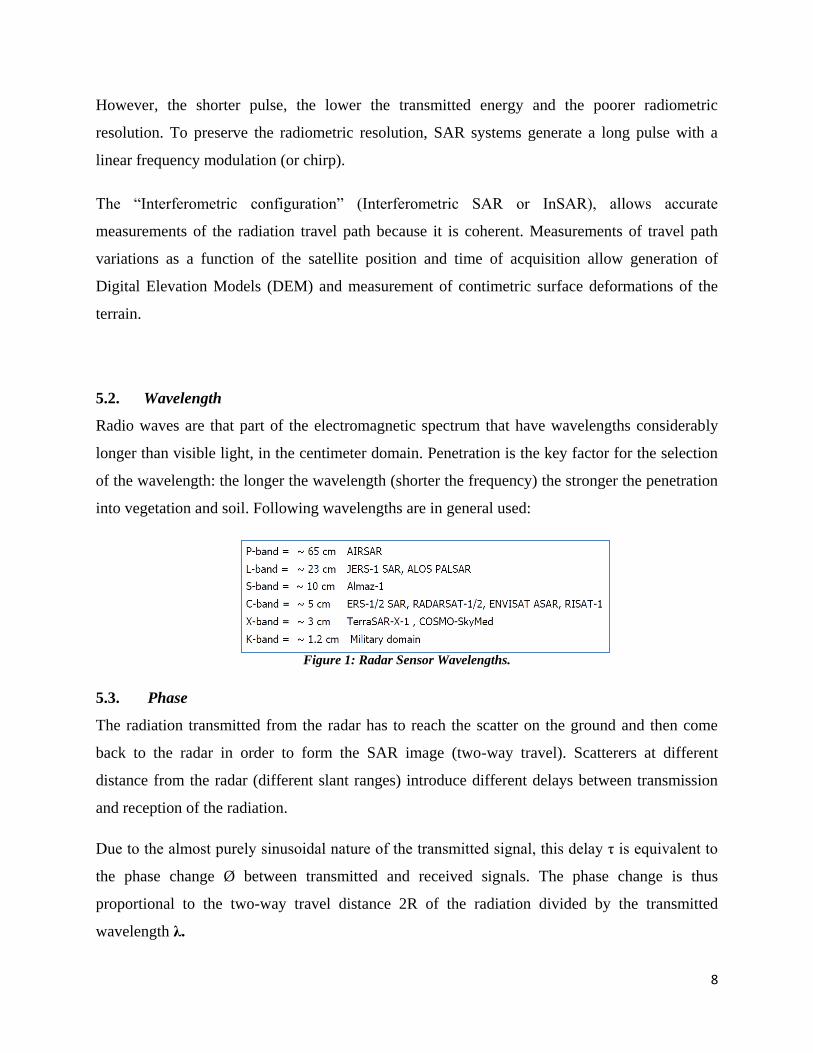
5.2. Wavelength
Radio waves are that part of the electromagnetic spectrum that have wavelengths considerably
longer than visible light, in the centimeter domain. Penetration is the key factor for the selection
of the wavelength: the longer the wavelength (shorter the frequency) the stronger the penetration
into vegetation and soil. Following wavelengths are in general used:
Figure 1: Radar Sensor Wavelengths.
5.3. Phase
The radiation transmitted from the radar has to reach the scatter on the ground and then come
back to the radar in order to form the SAR image (two-way travel). Scatterers at different
distance from the radar (different slant ranges) introduce different delays between transmission
and reception of the radiation.
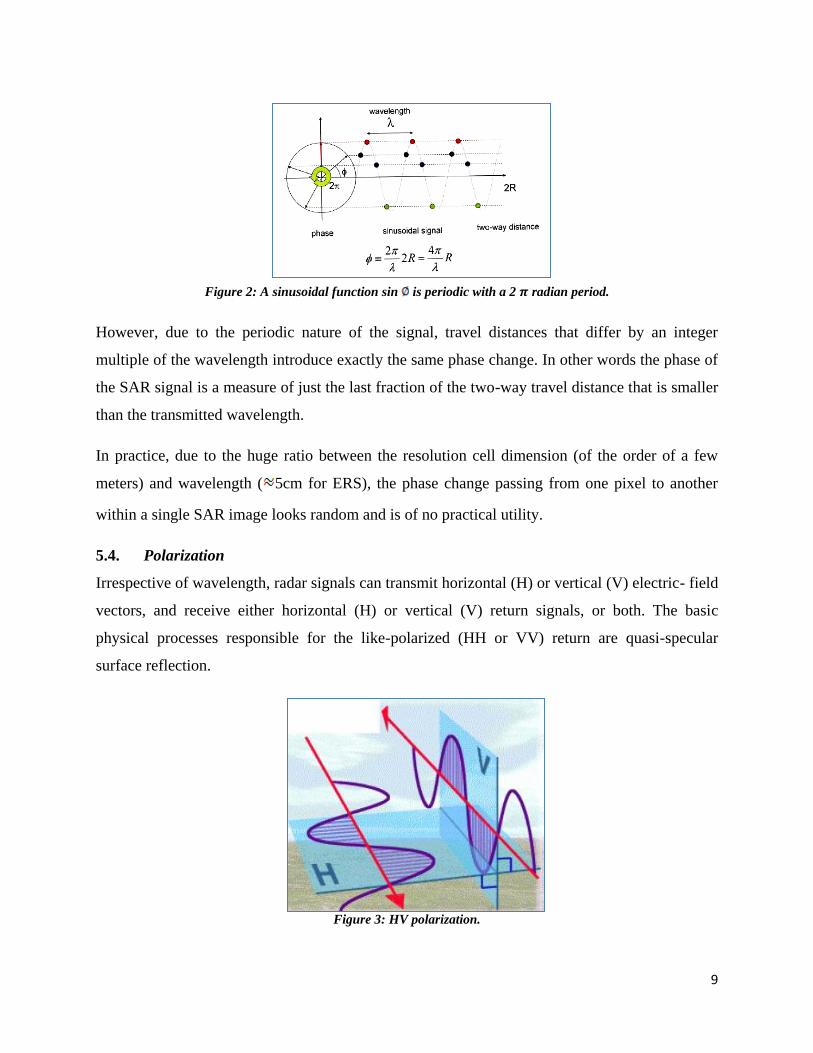
Due to the almost purely sinusoidal nature of the transmitted signal, this delay τ is equivalent to
the phase change Ø between transmitted and received signals. The phase change is thus
proportional to the two-way travel distance 2R of the radiation divided by the transmitted
wavelength λ.
9
Figure 2: A sinusoidal function sin is periodic with a 2 radian period.
However, due to the periodic nature of the signal, travel distances that differ by an integer
multiple of the wavelength introduce exactly the same phase change. In other words the phase of
the SAR signal is a measure of just the last fraction of the two-way travel distance that is smaller
than the transmitted wavelength.
In practice, due to the huge ratio between the resolution cell dimension (of the order of a few
meters) and wavelength ( 5cm for ERS), the phase change passing from one pixel to another
within a single SAR image looks random and is of no practical utility.
5.4. Polarization
Irrespective of wavelength, radar signals can transmit horizontal (H) or vertical (V) electric- field
vectors, and receive either horizontal (H) or vertical (V) return signals, or both. The basic
physical processes responsible for the like-polarized (HH or VV) return are quasi-specular
surface reflection.
Figure 3: HV polarization.

10
5.5. Incidence Angle
The incidence angle () is defined as the angle formed by the radar beam and a line
perpendicular to the surface. Microwave interactions with the surface are complex, and different
reflections may occur in different angular regions. Returns are normally strong at low incidence
angles and decrease with increasing incidence angle.
5.6. Scattering Mechanisms
SAR images represent an estimate of the radar backscatter for that area on the ground. Darker
areas in the image represent low backscatter, while brighter areas represent high backscatter.
Bright features mean that a large fraction of the radar energy was reflected back to the radar,
while dark features imply that very little energy was reflected.
Backscatter for a target area at a particular wavelength will vary for a variety of conditions, such
as the physical size of the scatterers in the target area, the target's electrical properties and the
moisture content, with wetter objects appearing bright, and drier targets appearing dark. The
exception to this is a smooth body of water, which will act as a flat surface and reflect incoming
pulses away from the sensor (these bodies will appear dark). The wavelength and polarization of
the SAR pulses, and the observation angles will also affect backscatter.
5.6.1. Surface and Scattering
A useful rule-of-thumb in analysing radar images is that the higher or brighter the backscatter on
the image, the rougher the surface being imaged. Flat surfaces that reflect little or no radio-
microwave energy back towards the radar will always appear dark in radar images. Vegetation is
usually moderately rough on the scale of most radar wavelengths and appears as light grey in a
radar image.
11
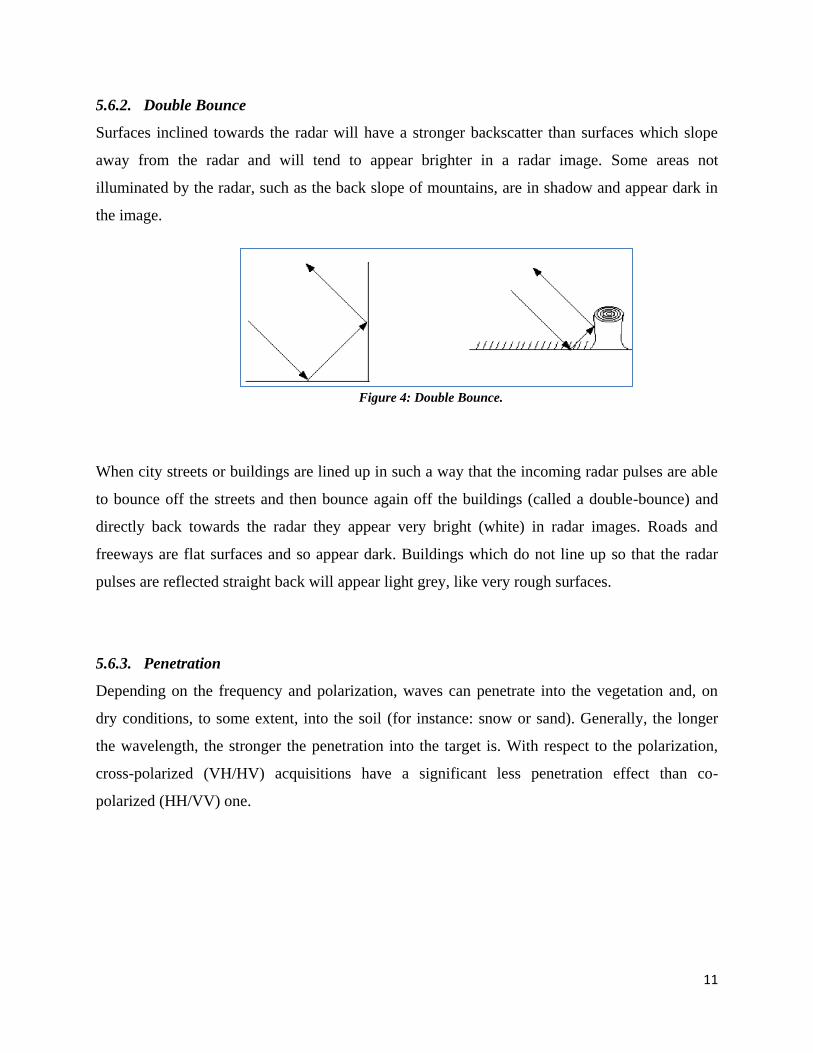
5.6.2. Double Bounce
Surfaces inclined towards the radar will have a stronger backscatter than surfaces which slope
away from the radar and will tend to appear brighter in a radar image. Some areas not
illuminated by the radar, such as the back slope of mountains, are in shadow and appear dark in
the image.
Figure 4: Double Bounce.
When city streets or buildings are lined up in such a way that the incoming radar pulses are able
to bounce off the streets and then bounce again off the buildings (called a double-bounce) and
directly back towards the radar they appear very bright (white) in radar images. Roads and
freeways are flat surfaces and so appear dark. Buildings which do not line up so that the radar
pulses are reflected straight back will appear light grey, like very rough surfaces.
5.6.3. Penetration
Depending on the frequency and polarization, waves can penetrate into the vegetation and, on
dry conditions, to some extent, into the soil (for instance: snow or sand). Generally, the longer
the wavelength, the stronger the penetration into the target is. With respect to the polarization,
cross-polarized (VH/HV) acquisitions have a significant less penetration effect than co-
polarized (HH/VV) one.

12
Figure 5: Penetration.
5.6.4. Speckle
The presence of several scatterers within each SAR resolution cell generates the so-called
“speckle” effect that is common to all coherent imaging systems. Speckle is present in SAR, but
not in optical images. In fact, speckle refers to a noise-like characteristic produced by coherent
systems such as SAR and Laser systems (note: Sun’s radiation is not coherent).
It is evident as a random structure of picture elements (pixels) caused by the interference of
electromagnetic waves scattered from surfaces or objects. When illuminated by the SAR, each
target contributes backscatter energy which, along with phase and power changes, is then
coherently summed for all scatterers, so called random-walk. This summation can be either high
or low, depending on constructive or destructive interference. This statistical fluctuation
(variance), or uncertainty, is associated with the brightness of each pixel in SAR imagery.
When transforming SAR signal data into actual imagery - after the focusing process - multi-look
processing is usually applied (so called non-coherent averaging). The speckle still inherent in the
actual SAR image data can be reduced further through adaptive image restoration techniques
(speckle filtering).
Homogeneous areas of terrain that extend across many SAR resolution cells (for instance, a large
agricultural field covered by one type of cultivation) are images with different amplitudes in

13
different resolution cells. The visual effect is a sort of “salt and papper” screen superimposed on
a uniform amplitude image.
This speckle effect is a direct consequence of the superposition of the signals reflected by many
small elementary scatterers (those with a dimension comparable to the radar wavelength) within
the resolution cell. These signals, which have random phase because of multiple reflections
between scatterers, add to the directly reflected radiation. The resulting amplitude will depend on
the imbalance between signals with positive and negative sign.
5.6.5. Data Statistics
SAR data are composed by a real and imaginary part (complex data), so-called in-phase and
quadrature channels (see figure 6). The amplitude (A) has a Rayleigh distribution, while the
intensity (I) or Power (=A2) has a negative exponential distribution. In single-channel SAR
system the phase provides no information, while the Amplitude (or intensity/Power) is the only
useful information.
Figure 6: Complex Data.
The Intensity or Power data are usually multi-looked by averaging over range and/or azimuth
resolution cells - the so-called incoherent averaging. Fortunately, even multi-looked Intensity
data have a well-known analytic Probability Density Function. In fact, a L-look- image (L is the
number of looks) is essentially for the convolution of L-look exponential distributions.
5.6.6. Geometry
Due to the completely different geometric properties of SAR data in range and azimuth direction,
it is worth considering them separately to understand the SAR imaging geometry. According to

14
this definition, distortions in range direction are large. They are mainly caused by topographic
variations. The distortions in azimuth are much smaller but more complex.
6. INTERFEROTRETRIC IMAGES
6.1. Statistic of the Return
According to the central limit theorem, in order to hold the phase and quadrature components of
the return, and superposition of many independent elementary scatterers, gratings or point
scatterers are independent Gaussian random variables with variance dependent on the terrain
reflectivity. After that, the amplitude of a single pixel in a SAR image has a Rayleigh
distribution. Its amplitude squared or intensity has a Laplacian distribution with mean (Bamler,
1998). The value of in a pixel of horizontal coordinates r (range), a (azimuth) is dependent on
the local reflectivity of the terrain characterized by a non-dimensional parameter, , times the
inverse of sine of the slope of the terrain, to incorporate foreshortening effects that brighten any
surfaces that verge towards the satellite.
The value of decreases for increasing values of the off-nadir angle , and depends on the
terrain cover (Laur, 1998). In order to correctly estimate , it is necessary to average the value
of the intensity (the amplitude squared) over several pixels that should have the same statistics.
(3)
The amplitude of each pixel, being a random variable, in the SAR images is affected by speckle
noise. However, it has to be understood that for repeated acquisitions of a stationary object the
speckle “noise” remains the same, which is different from other kinds of random noise. To
remove this effect, the randomness squares of several neighboring pixels should be averaged.
The formula that gives the dispersion of the estimate, however, depends also on the random
noise superposed on the data that increases the dispersion of the estimate. It is usually given in
terms of the Equivalent Number of Looks (ENL):

15
(4)
Where, number of range looks and number de azimuth looks.
Radiometric resolution is another parameter used to characterize the image quality and therefore
the amount of speckle on the data.
(5)
6.2. Coherence
The principle of SAR interferometry relies on the acquisition of two images of the same scene
with slightly different viewing angles. Usually, after co-registration, the normalized complex
cross- correlation is computed. Its magnitude, called coherence, is an important interferometric
measure, since it provides information about temporal stability and phase difference reliability.
Coherence is a measure of the phase noise of the interferogram, and it has also been successfully
used as a terrain classification parameter. The interferometric phase (i.e., the phase difference
between two images acquired from slightly different sensor positions) contains “geometric
information” from which the three dimensional position of the scatter element can be derived.
Estimation accuracy of the interferometric phase is characterized by the degree of coherence.
Coherence is defined as the absolute value of the normalized complex correlation coefficient:
(6)
in which and denote the first and second complex SAR images respectively, and the
brackets represent the ensemble average, which is estimated by spatial averaging.
The interferometric coherence map provides thematic information that increases the possibility
of discrimination between different lands cover significantly. Coherence is influenced by a
number of independent factors including the time interval between images, the difference in
signals between images due to the different positions in space from which they were acquired,

16
and other factors (Grey et al, 2003). High coherence means no or small changes whereas low
coherence indicates high degree of change. Usually, in coherence maps, high coherence value
areas include residential places, bare soil and deforested areas, whereas low coherence areas
represent the forest, water and some other vegetation. On the other hand, urban areas and
agricultural field show middle to high coherence as they are affected slightly with one day
interval; but, water and forest show low coherence due to the change in the geometric structure
of the scatterers.
Absolute value of the coherence provides a useful measure of the interferogram quality,
excluding random noise; the changes with time of the scattering properties of a target determine
its coherence. In other hand, the amplitude of each pixel of the interferogram is proportional
to the product of the amplitudes , of the two initial images, and its phase is equal to
their phase difference. The SAR image pixels are the realization of random processes and
therefore we can expect the amplitudes of the interferogram to fluctuate severely even in the
most fovourable case of no temporal decorrelation and zero baseline. Therefore, the phase noise
changes from pixel due to different impact of the random noise superposed on the random
amplitudes of the pixels. Pixels with weak returns will show more dispersed interferometric
phase; strong and stable scatterers will yield more reliable phases. In addition, there are
important temporal changes between the two acquisitions: due to the change in the off-nadir
angle and due to random noise.

17
7. STUDY AREA
The Pollino National Park extends over an area of 192.565 hectares, 94.814 ha of which are in
Basilicata region and 97.751 ha in Calabria region. It includes 56 municipalities, 24 in Basilicata
and 32 in Calabria. The study area is the Lucanian side of Pollino National Park, situated in the
south of Basilicata.
Fig.7: Pollino National Park.
The Pollino Park is one of the most important natural Italian Parks both in terms of extension - it
is the widest national Park in Europe - and of naturalistic importance, especially for the presence
of Pinus leucodermis. The agricultural area used in the Lucanian sector of the Park is equal to
about 60 thousand hectares, and more than 55% of which grassland, about 38% fodder crops,
whereas the remaining 7% is for 202 other agricultural uses (ISTAT, 1991). Livestock farming in
the Lucanian area of Pollino Park is scarcely specialized and of small or very small size.
Breeding farms are almost 7.000 (ISTAT, 1991), equal to 57% of the total. Breeding is often
practiced in piedmont areas predominantly between 700 and 900 m above mean sea level.
Vertical migratory herding is still adopted to use high altitude for grazing in summer months;

18
mostly sheep and goat raising farms use grazing as the main form to meet feed requirements of
their herds.
This area exhibits a very complex landscape with various ecosystems ranging from
Mediterranean to Alpine habitats, at elevations varying between 134 and 2266 m a.s.l. Particular
types of vegetation cover can be identified according to the altitude range: (a) up to 500 m a.s.l.,
the natural vegetation coverage is made up of thickets of maquis, and often undergoes an intense
process of replacement with green xeric meadows and Mediterranean shrubby formations due to
human activities; (b) from 500 to 1000–1200 m elevation, the vegetation is characterized
predominantly by woodlands of Turkey oak (Quercus cerris) and by a few groups of mixed oak
woods (mainly composed of oaks such as Quercus pubescens and Quercus cerris); (c) between
1000 to 1800 m altitude, beech (Fagus sylvatica) is the most widespread vegetation type, with
silver firs (Abies alba) also present as small clusters. Together with the beech, these represent a
natural vegetation relict of woodlands that once extended over all these areas; inside
thedeforested areas, wide mesophytic prairies, which are used as pasture land, are often found;
(d) above 1800 m a.s.l., the upper level of the forest belt, xerophytic prairies alternate with
vegetation typical for the carbonate rocks and breccias that form glacial cirques. In this area, the
most common natural vegetation type is the high mountain Mediterranean shrub (juniper
thickets), whereas the most peculiar feature of the park is the Bosnian pine (Pinus leucodermis),
a tree species typical of the Balkan peninsula's flora that is present in just a few areas of Italy.

19
8. SATELLITE DATA
8.1. OPTICAL DATA: GEO-EYE 1
In this study we used the Geo-Eye 1 VHR satellite data. This sensor acquires data in two
different configurations: panchromatic and multispectral. In the multispectral mode it has 4
different bands (see Table 1), from the visible to near-infrared with 1.6 m of spatial resolution, a
revisit time less than three days, swath width of 15.2 km and dynamic range of 11 bit per pixel.
Imaging Mode Panchromatic Multiespectral
Spatial Resolution 0.41 mtrs. GSD at Nadir 1.65 mtrs GSD at Nadir
Spectral Range 450-900 nm 450-520 nm (blue)
520-600 nm (green)
625-695 nm (red)
760-900 nm (near IR)
Swath Width 15.2 km
Off-Nadir Imaging Up to 60 degrees
Dinamic Range 11 bit per pixel
Mission Life Expectation > 10 years
Nodal Crossing 10:30 am
Orbital Altitude 681 km
Revisit Time Less than 3 day
Table 1. Specification parameters of Geo-eye image.

20
For the further land use classification, the whole band set was taken into consideration and an
orthomosaic was built with six Geo-eye 1 images acquired on 06/06/09 and geocoded in the
WGS-84 UTM Projection system (zone 33).
8.2. RADAR DATA: COSMO SkyMed
The Cosmo SkyMed (Constellation of Small Satellites for Mediterranean basin Observation)
radar satellites are the largest Italian investment in Space Systems for Earth Observation funded
by the Italian Space Agency (ASI) and the Italian Ministry of Defense (MoD). They are
constituted by X band radar sensors and are mainly used for civil protection purposes. The main
COSMO characteristics are resumed in Table 2.
For this study we used a set of 8 Cosmo-SkyMed X-band images both in “Spotlight” and
“Stripmap HIMAGE” modes. These images have both a HH polarization with different spatial
resolutions (i.e. the Spotlight images 1m and the Stripmap 3m). The images were acquired
between 13 December 2008 and 3 March 2009 and orthorectified in the WGS-84 UTM
projection system, zone 33.
Table 2. Specification parameters of Cosmo SkyMed image.
8.3. DIGITAL ELEVATION MODEL
Two Digital Elevation data provided by the CNR-IMAA with 6 and 10 meters of resolution were
used to accurately orthorectify both COSMO and Geo-Eye 1 imagery.
Cosmo SkyMed
Spotlight Stripmap ScanSAR
HIMAG
E
Ping
Pong
Wide
Region Huge Region
Polarization Single Single Dual Single Single
Swath width [km x km] 10X10 40X40 30X30 100X100 200X200
Accessible swath ~620 km
Geometric Resolution [m] 1 3 15 30 100
21
9. METHODS
9.1. MULTISPECTRAL IMAGE CLASSIFICATION METHODS
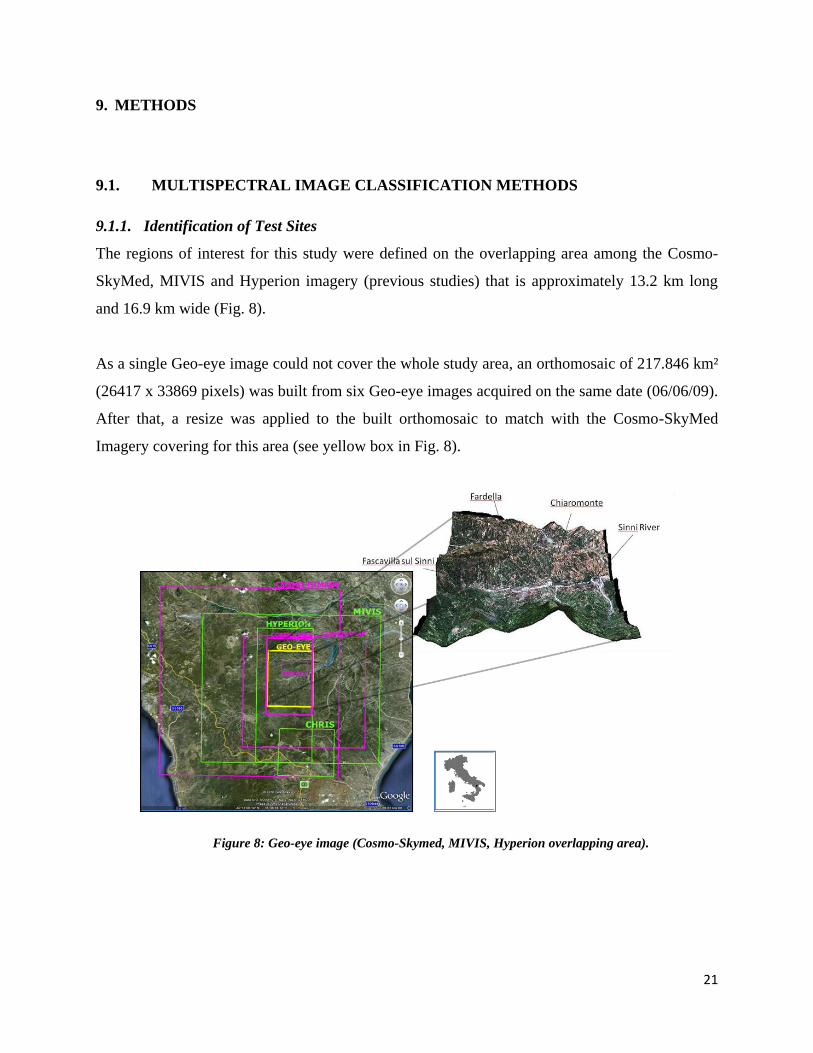
9.1.1. Identification of Test Sites
The regions of interest for this study were defined on the overlapping area among the Cosmo-
SkyMed, MIVIS and Hyperion imagery (previous studies) that is approximately 13.2 km long
and 16.9 km wide (Fig. 8).
As a single Geo-eye image could not cover the whole study area, an orthomosaic of 217.846 km²
(26417 x 33869 pixels) was built from six Geo-eye images acquired on the same date (06/06/09).
After that, a resize was applied to the built orthomosaic to match with the Cosmo-SkyMed
Imagery covering for this area (see yellow box in Fig. 8).
Figure 8: Geo-eye image (Cosmo-Skymed, MIVIS, Hyperion overlapping area).

22
9.1.2. Classification of the Very High Resolution Geo-eye Image
In order to evaluate the potential of Geo-eye data set for mapping land cover and land use in the
chosen study area was implemented the procedure illustrated in figure 8.
The Geo-eye data set was classified at the pixel and object level, and the algorithm performance
and class accuracy were evaluated and compared to establish the best classification results. So, if
the results were not goods the procesure identification started again (loop indentification-
application-validation).
The land covers in the study area were first organized according to the standard legend of the
CORINE Land Cover 2000 (CLC) classification system. In fact, more than 30 ROI’s were
selected and organized according to the standard hierarchical structure of the European Union's
CORINE classification system (Coordination of Information on the Environment) on the Geo-
eye image.
The validation ROI’s were chosen according to the ground truth data, their homogeneous
distribution and with a statistically significative amount of pixels on the Geo-eye image using the
RGB (625-695nm-Red, 520-600nm-Green, 450-520nm-Blue) and NIR (760- 900nm, Near
Infrared) bands combination.
.

23
Flowchart 1: Flow diagram indication steps followed in the method.
At the moment two diferent methodologies were identify on Geo-eye image of 32.000 Km²
(15267 X 8442 pixels) and 2 GB weigth. The first one was based to pixel and the second one to
object. There are a brief description bellow:
9.1.2.1. Clasification Pixels Oriented (NDVI thereshold)
The first step of this methodology consisted in separate the image by mean NDVI thereshold
and the goal of this step was share the relevant information. In fact, the NDVI thereshold was
used to created two mask with and without vegetation. Therefore, the vegetation mask was
created with NDVI value upper 0.68 and the no vegetation mask was created with NDVI value
down 0.68.
The second step was applied the Maximum likelihood algorithm to the image with vegetation
mask. This method allows identified four classes of CORINE: Roof Tiles, Roof Concret, Bare
soil and Water Course-River Bed.
The third step was applied the Isodata algorithm to the image with mask no vegetation and
allows identified tree class of CORINE: Agricultural areas, Woodland, and Meadows/Grassland.

24
The methodology with NDVI thereshold on Geo-eye image of 32.000 Km² (15267 X 8442
pixels) was evaluated by confusion matrix. The Maximum likelihood algorithm has gotten a 73
% overall acurancy and 0.68 Kappa coefficient and the Isodata algorithm has gotten a 90.90 %
averall acurancy and 0.86 Kappa coefficient
9.1.2.2. Classification Oriented Object (Segmentation)
Was employed the eCognition Professional 5.0 version (DP, 2006) software, developed for
Definiens Imaging corporation since 2000, for to carry out the segmentation and classification
oriented object. The classification analysis with this software is based to objects and allow assess
the size, shape, color, texture at the same time. The process time is low because the segmentation
reduces the object number to classify.
The date set image used for the classification of the ortomosaic geo-eye image was performed by
five bands: blue, green, red, near infrared and NDVI index.
The first step in the classification process was performed by the “scale” parameter, which
determines the maximum global segmentation heterogeneity allowed. Is possible to get different
types of segmented images due to the scale parameter can be changed.
The second step was used the Multiresolution Segmentation Mode. The program takes into
account three criteria for segmentation: color, smoothness and compactness. For most cases color
is the most important and which is strongest in the definition of the objects. The color criterion
takes into account the percentage of spectral homogeneity.
The shape and homogeneity are also important in the extraction of objects (e.g., rectangular fit
algorithm). The criteria for segmentation of the image bands were from 0.7 to 0.3 for color and
shape. Within of color option was considered 0.5 for smoothness and compactness.
The third step was classified the image form Nearest Neighbour Algorithm and were chosen
some samples for each class.

25
Unfortunately, the results of this classification cannot be exported and evaluate because they
were not available the software license.
In other hand, the last validated methodology was on a Geo-eye data set of 217.846 km² (26417
X 33869 pixels), with three bans visible and one near infrared of 17 GB weight. Therefore, we
identified a procedure that allow obtain the best result with this image. (see third step in
flowchart 1)
9.1.2.3. ISODATA Classification with Independent Compenent Analysis
The second step was to apply the Independent Components Analysis (ICA) implemented in the
ENVI 4.7 Software. The Independent Component Analysis (ICA) is a multivariate data analysis
process that transforms an input dataset into a new dataset. Hence, transform a set of mixed
signals into components that are mutually independent.
The application of the ICA method was performed to extract some characteristic features from
the VHR image not well distinguishable by using traditional supervised classification methods,
so to obtain a more accurate land use classification.
The third step was to apply the ISODATA classifier on the classified ICA Geo-eye imagery.
The used specification parameters were the followings: Number Class of 20 up to 30, Iterations
10, Change Threshold 5 %, Minimum pixels in class 100, Maximum class Stdv 1 and Maximum
Class Merge Pairs 4.
ISODATA is the acronym of Interactive Self-Organizing Data Analysis Techniques; it is an
unsupervised classifier that calculates class means evenly distributed in the data space then
iteratively clusters the remaining pixels using minimum distance techniques. Each iteration
recalculates means and reclassifies pixels with respect to the new means. Iterative class splitting,
merging, and deleting is done based on input threshold parameters. All pixels are classified to the
nearest class unless a standard deviation or distance threshold is specified, in which case some
pixels may be unclassified if they do not meet the selected criteria. This process continues until

26
the number of pixels in each class changes by less than the selected pixel change threshold or the
maximum number of iterations is reached.
The results of ISODATA algorithm application were compared with a visual review and the
accuracy was checked using the confusion matrix method.
9.2. VHR OPTICAL CLASSIFICATION RESULTS
9.2.1. Spectral Classification
In order obtained the less spurious information to proceed to a spectral classification of classes.
Therefore, to show a spectral separation between selected ROI’s pairs for a given input file.
These values range from 0 to 2.0 and indicate how well the selected ROI’s pairs are statistically
separate. Values greater than 1.9 indicate that the ROI’s pairs have good separability.
Table 3: ROI’s separability.
Bare Soil and Build - Roof 1,71
Water Course-River Bed and Build - Roof 1,81
Water Course-River Bed and Road 1,82
Road and Shadow 1,86
Woodland and Meadow/Grassland 1,86
Water Course-River Bed and Bare Soil 1,94
Build - Roof and Shadow 1,96
Water Course-River Bed and Shadow 1,97
Bare Soil and Woodland 1,97
Woodland and Shadow 1,98
Bare Soil and Shadow 1,99
Water Course-River Bed and Woodland 1,99
Woodland and Road 1,99
Woodland and Build 1,99
Bare Soil and Meadow/Grassland 1,99
Meadow/Grassland and Road 1,99
Water Course-River Bed and Meadow/Grassland 2
Meadow/Grassland and Shadow 2
Meadow/Grassland and Build - Roof 2

27
The results of separability analysis show that ROI’s pairs; like bare soil, roads, and urban areas
has a bad separability. In fact, the spectral responses of the selected classification classes have a
great similarity in the visible and near infrared, due to the limited spectral information of the
sensor. In the Figure 3 it can be seen the spectral behavior for the different class for the
ortomosaic geo-eye image dated 06/06/2009.
Figure 10: Spectral behavior of the Geo-eye image.
9.2.2. Accuracy Evaluation
The classification accuracies was computed by means of a confusion matrix, from which the
overall (OA)(Congalton, 1991) and the Kappa statistics (Cohen, 1960; Montserud & Leamans,
1992) were derived. The OA is the percentage of cases that are correctly allocated, calculated
along the confusion matrix diagonal, while the Kappa coefficient (K) shows how each
classification differs from a random classification of land cover types.
The Kappa statistic is a suitable measure of the accuracy in thematic classification procedures
because it takes into account the entire error matrix instead of simply the diagonal elements, like
the overall accuracy does. The Kappa coefficients and OA values provide a measure of how well
a classification performed with respect to ground-truth data (Michelson et al., 2000). We also
28
used the limit proposed by Foody (2002), who argued that an OA exceeding 85% is considered
good. Although this limit can be considered arbitrary, it provides a useful qualitative benchmark.
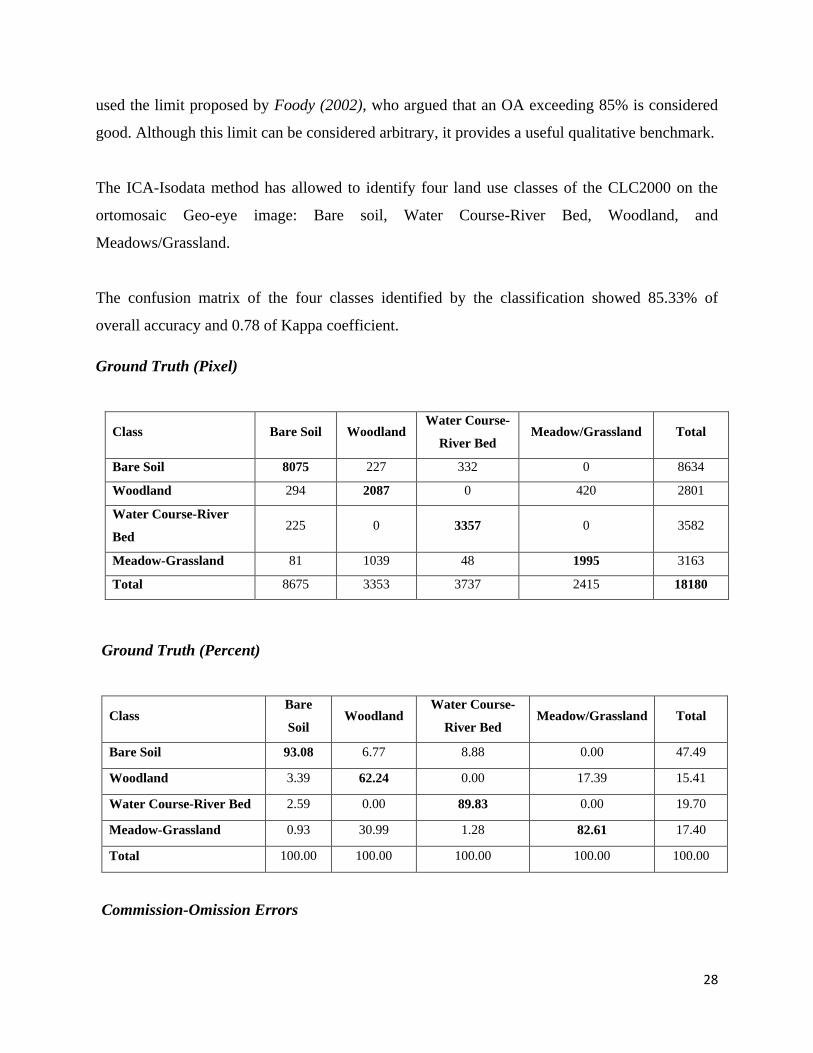
The ICA-Isodata method has allowed to identify four land use classes of the CLC2000 on the
ortomosaic Geo-eye image: Bare soil, Water Course-River Bed, Woodland, and
Meadows/Grassland.
The confusion matrix of the four classes identified by the classification showed 85.33% of
overall accuracy and 0.78 of Kappa coefficient.
Ground Truth (Pixel)
Class Bare Soil Woodland Water Course-
River Bed Meadow/Grassland Total
Bare Soil 8075 227 332 0 8634
Woodland 294 2087 0 420 2801
Water Course-River
Bed 225 0 3357 0 3582
Meadow-Grassland 81 1039 48 1995 3163
Total 8675 3353 3737 2415 18180
Ground Truth (Percent)
Class Bare
Soil Woodland
Water Course-
River Bed Meadow/Grassland Total
Bare Soil 93.08 6.77 8.88 0.00 47.49
Woodland 3.39 62.24 0.00 17.39 15.41
Water Course-River Bed 2.59 0.00 89.83 0.00 19.70
Meadow-Grassland 0.93 30.99 1.28 82.61 17.40
Total 100.00 100.00 100.00 100.00 100.00
Commission-Omission Errors

29
Class Commission
(Percent)
Omission
(Percent)
Commission
(Pixels) Omission (Pixels)
Bare Soil 6.47 6.92 559/8634 600/8675
Woodland 25.49 37.76 714/2801 1266/3353
Water Course-River Bed 6.28 10.17 225/3582 380/3737
Meadow-Grassland 36.93 17.39 1168/3163 420/2415
9.2.3. Analisys Multitemporal between Geo-eye and MIVIS images
The aim of this chapter is see the behavior land use through of 11 years of antropic activity on
Pollino National Park. To detecting any variation on the wood and meadow land was made a
comparation between Geo-eye and Mivis classification.
The airborne MIVIS data were acquired on 9 November 1998, within the framework of the
“Pollino Project” (Cuomo et al., 1999), on the Basilicata side of Pollino National Park. The
MIVIS data cover up to 20,725 ha, with fifteen flight lines oriented NNW–SSE with
approximately 20–25% lateral overlap. MIVIS sensor acquires data in whiskbroom mode with
four spectrometers in the VNIR, SWIR, and TIR ranges, the spatial resolution is 6 -7 m/pixel
depending on the flight altitude with respect to the surface relief. The land cover classification
with the Multispectral Infrared Visible Imaging Spectrometer (MIVIS) airborne hyperspectral
imagery classification was made in 1998.
The overlapping area between the Geo-eye and MIVIS classifications corresponding to a Geo-
eye scene of 1444×2400 pixels and to five contiguous MIVIS strips, was selected as the study
area (shown in fig. 13 a).

30
Figure 11: MIVIS classification up to 5th
CLC
level obtained by applying the MD algorithm
using 13 CORINE classes
Figure 12: Geo-eye classification obtained by ICA-Isodata algorithm
with 4 CORINE classes up to the 2nd
CLC level.

31
(a) (b)
Figure 13. (a) MIVIS woodland classes; (b) Geo-eye woodland classes.
Comparing statistic was done on the woodland class of MIVIS and Geo-eye; The first one
(MIVIS woodland classes) had 55,15 % overall classes with 1.270.741 pixel, and the second one
(Geo-eye woodland classes) had 53,33 % overall classes with 12.102.292 pixel. Hence, the
antropic activity increase in 2.18 % since 1998 ( figure. 13 a-b).

32
9.3. SAR IMAGE PRE-PROCESSING AND PROCESSING METHODS
The Sarscape module implemented in the ENVI 4.7. software was used for the pre-processing of
the 8 Cosmo SkyMed imagery in Spotlight (1 meter) and Himage (2 meter) modes. The images
were acquired between 13 December 2008 and 3 March 2009 and orthorectified in the WGS-84
UTM Projection system, zone 33.
Flowchart 2: Methodological Scheme of Cosmo SkyMed Pre-processing and processing.
The pre-processing of the cosmo SkyMed image was made taking the raw radar data and by
mean the steps showed in the flowchart get a precision product.
The first step was import the Cosmo SkyMed raw data on Sarscape software and transform them
in single look complex image. Images in Single Look Complex format are obtained after
matched filtering in range and azimuth of the raw data and produce a image that contain
amplitude and phase.
33
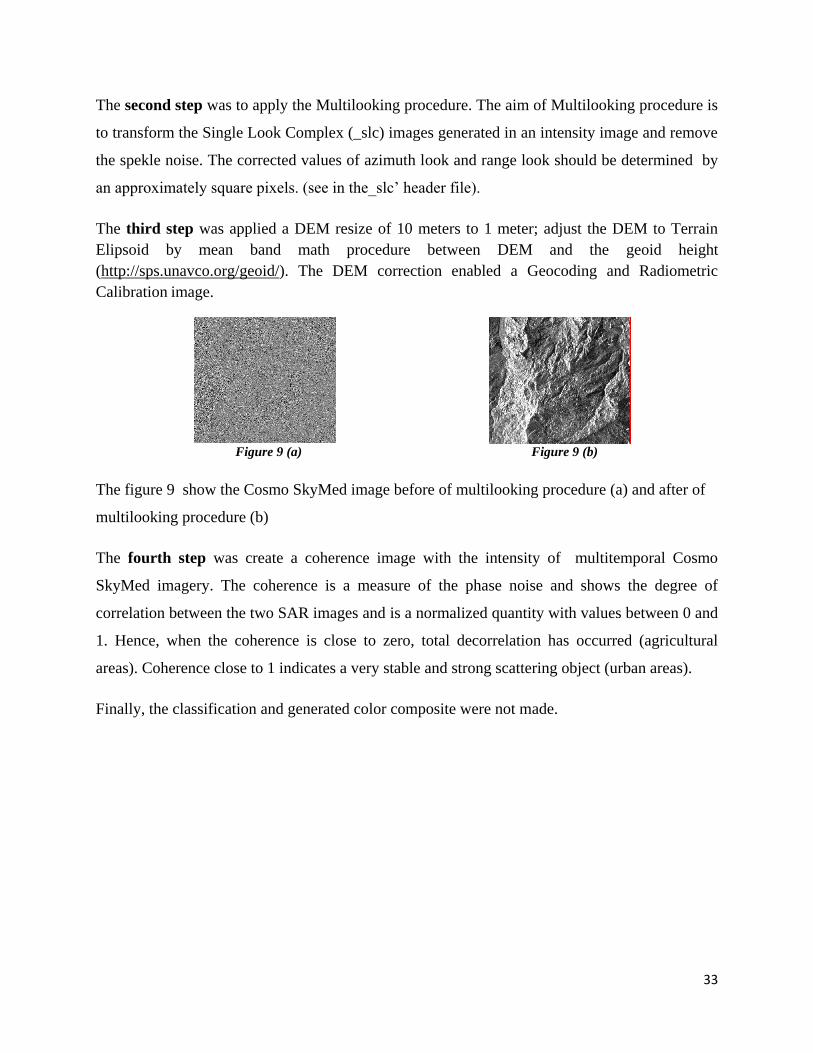
The second step was to apply the Multilooking procedure. The aim of Multilooking procedure is
to transform the Single Look Complex (_slc) images generated in an intensity image and remove
the spekle noise. The corrected values of azimuth look and range look should be determined by
an approximately square pixels. (see in the_slc’ header file).
The third step was applied a DEM resize of 10 meters to 1 meter; adjust the DEM to Terrain
Elipsoid by mean band math procedure between DEM and the geoid height
(http://sps.unavco.org/geoid/). The DEM correction enabled a Geocoding and Radiometric
Calibration image.
Figure 9 (a) Figure 9 (b)
The figure 9 show the Cosmo SkyMed image before of multilooking procedure (a) and after of
multilooking procedure (b)
The fourth step was create a coherence image with the intensity of multitemporal Cosmo
SkyMed imagery. The coherence is a measure of the phase noise and shows the degree of
correlation between the two SAR images and is a normalized quantity with values between 0 and
1. Hence, when the coherence is close to zero, total decorrelation has occurred (agricultural
areas). Coherence close to 1 indicates a very stable and strong scattering object (urban areas).
Finally, the classification and generated color composite were not made.

34
9.4. VHR RADAR RESULTS
9.4.1. Coherence Image Interpretation
The coherence is a measure of the phase noise and show the degree of correlation between the
two SAR images that show a normalized quantity with values between 0 and 1.
This following image is a composition RGB radar data with a coherence image and two Cosmo
SkyMed Himage intensity imagery. Hence, the channel red is the coherence image, in the
channel green the Cosmo SkyMed image of December of 2008 and the channel blue the Cosmos
SkyMed image of March of 2009.
Figure 14: Coherence Image.
The agricultural areas present coherence value close to zero and in the image is showed with the
green color. Therefore, in the agricultural areas a degree of decorrelation exist between both
image
In other hand, the urban areas current a coherence near to one, indicates a very stable and strong
scattering object.
Agricultural areas
Urban areas

35
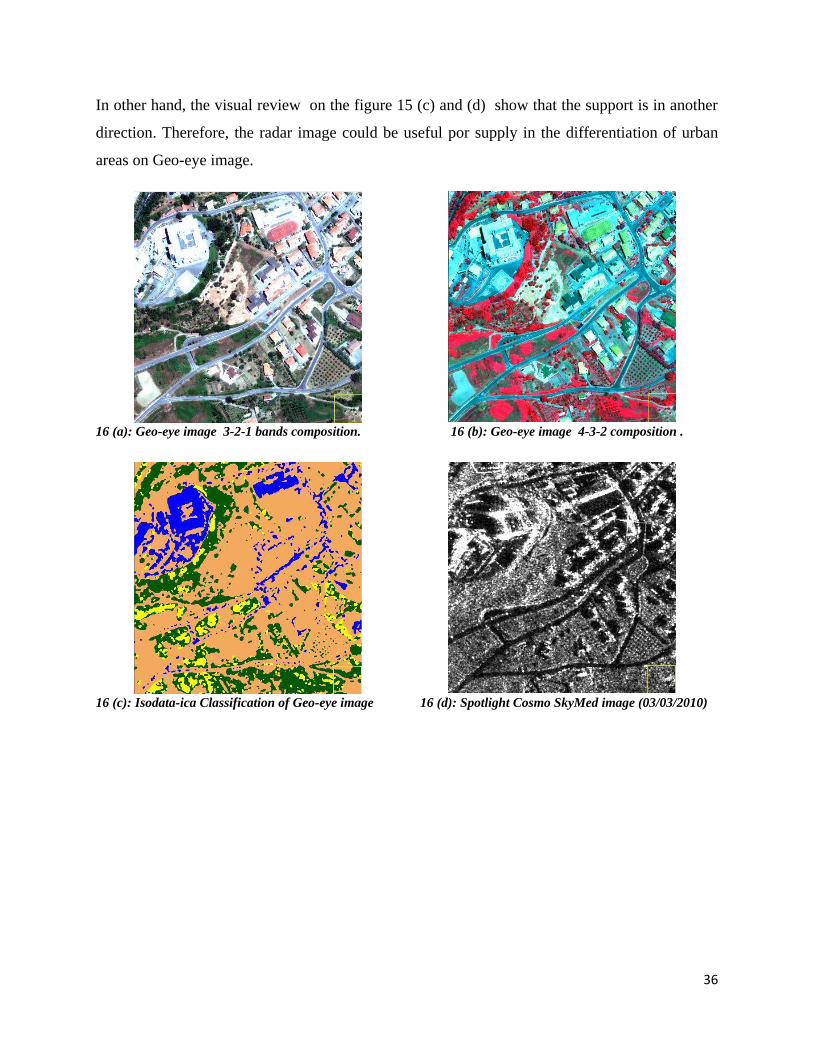
9.4.2. Integration VHR Optical and Radar Data
The figures 14 (a), (b), (c), (d); bellow shows a example of woodland area on Geo-eye, ICA-
ISODATA classification and Cosmo SkyMed radar imagery.
15 (a): Geo-eye image 3-2-1 bands composition. 15 (b): Geo-eye image 4-3-2 composition .
15 (c): Isodata-ica Classification of Geo-eye image 15 (d): Spotlight Cosmo SkyMed image (03/03/2010)
A visual review on the figure 14 (c) and (d) allow as consider the integration of both data set. In
this sense, the Isodata classification could be useful for support of forest and grassland areas on
Spotlight Cosmo SkyMed image (03/03/2010).
36
In other hand, the visual review on the figure 15 (c) and (d) show that the support is in another
direction. Therefore, the radar image could be useful por supply in the differentiation of urban
areas on Geo-eye image.
16 (a): Geo-eye image 3-2-1 bands composition. 16 (b): Geo-eye image 4-3-2 composition .
16 (c): Isodata-ica Classification of Geo-eye image 16 (d): Spotlight Cosmo SkyMed image (03/03/2010)

37
10. CONCLUSION
The ICA- Isodata classification for the Geo-eye VHR data allows discriminate with a good
accuracy (up to 2nd
CLC level) the following classes: water course and river bed, bare soil,
woodland and meadow-grassland.
The statistical comparison between forest areas in the classification obtained MIVIS and Geo-
eye imagery can be a useful and cost-effective in the management and monitoring of natural
areas.
The main trouble in order to arrive to an accurate classification on the very high resolution image
was the poor spectral information and complexity of the scene. The diversity of the classes in the
scene increases as the size of the Geo-eye image increases. Therefore, reach higher levels of
CLC on Geo-eye classification is extremely difficult.
The preliminary results highlights the possibility to integrate the optical and radar imagery for
improving the classification/discrimination of urban areas. Hence, the combination of optical
data with radar data source will allow the improvement of the finally classification.
The radar coherence data will be used to try to attain a land cover change map and land use map.
Problems
We had troubles with the availability of the COSMO SkyMed data.
The software licences for the pre-processing and processing of VHR Optical (eCognition) and
Radar Data (Sarscape) were both not available, we used only a trial license for the Sarscape
module.

38
11. REFERENCES
Lambin EF, Geist H, Lepers E. (2003). Dynamics of land-use and land-cover change in tropical
regions. An. Rev. Environ. Resources 28:205–41.
Pan W, Bilsborrow R. (2005). The use of a multilevel statistical model to analyze factors
influencing land use: a study of the Ecuadorian Amazon. Global Planetary Change 47:232–52.
Paruelo J, Burke I, Lauenroth W. (2001). Land-use impact on ecosystem functioning in eastern
Colorado, USA. Global Change Biol. 7:631–9.
Serneels S, Linderman M., and Lambin E. F. (2007). A multilevel analysis of the impactof land
use on interannual land cover change in East Africa. Ecosystems (2007) 10: 402–418
Chatterjee, R.S., Trebossen, H., Rudant, J.P., Fruneau, B., Roy, P.S. (2002). Coherence of
SAR interferometric data as a function of temporal stability of the terrain elements: An
evaluative study to compare the utility of ERS tandem couple and 35-day couple in terrain
analysis. In: Proc. ISPRS Commission VII Symposium on Resource and Environmental
Monitoring, Hyderabad, 2-5 December. pp. 27-31 in sub-section Land Use Planning (on CD-
ROM).
Strozzi, T., Dammert, P., Wegmüeller, U., Martinez, J.M., Askne, J., Beaudoin, A. &
Hallikainen, M. (2000). Landuse Mapping with ERS SAR Interferometry. IEEE Transactions on
Geoscience and Remote Sensing, 38(2), pp766-775.
Engdahl, M.E. & Hyyppä, J.M. (2003). Land-cover Classification Using Multitemporal ERS-
1/2 InSAR Data. IEEE Transactions on Geoscience and Remote Sensing, 41(7), pp1620-1628.
R.S. Chatterjee, S.K. Saha, Suresh Kumar, Sharika Mathew, R.C. Lakhera, V.K. Dadhwal
(2008). ISPRS Interferometric SAR for characterization of ravines as a function of their
density,depth, and surface cover. Journal of Photogrammetry and Remote Sensing.

39
Nicolas Baghdadi, Nathalie Boyer, Pierre Todoroff, Mahmoud El Hajj, Agnès Bégué
(2009).Potential of SAR sensors TerraSAR-X, ASAR/ENVISAT and PALSAR/ALOS for
monitoring sugarcane crops on Reunion Island. Remote Sensing of Environment.
Giorgio Boni, Fabio Castelli, Luca Ferraris, Nazzareno Pierdicca, Sebastiano Serpico and
Franco Siccardi (2007). High resolution COSMO/SkyMed SAR data analysis for civil
protection from flooding events. 1-4244-1212-9
Shengli Huang, Robert L. Crabtree, Christopher Potter, Peggy Gross (2009). Estimating the
quantity and quality of coarse woody debris in Yellowstone post-fire forest ecosystem from
fusion of SAR and optical data Remote Sensing of Environment. RSE-07421.
Robert E. Kennedy, Philip A. Townsend, John E. Gross, Warren B. Cohen, Paul Bolstad,
Y.Q. Wang, Phyllis Adams (2009). Remote sensing change detection tools for natural resource
managers: Understanding concepts and tradeoffs in the design of landscape monitoring projects.
Remote Sensing of Environment 113 -1382-1396.
Floyd M. Henderson and Anthony J. Lewis. (1998). Principles and Applications of Imaging
Radar. ISBN: 0-471-29406-3.11.
Ustin Susan L. (2004). Remote Sensing for Natural Resource Management and Enviromental
Monitoring,.- ISBN: 0-471-31793-4.
Pignatti, Stefano; Cavalli, Rosa Maria; Cuomo Vicenzo; Fusilli, Lorenzo; Pascucci, Simone;
Santini, Federico (2009). Evaluating Hyperion capability for land cover mapping in a
fragmented ecosystem: Pollino National Park, Italy. Remote Sensing of Environment 113 (2009)
622-634.

40
Web site
http://www.geoeye.com/CorpSite/products/services/classification.aspx
http://www.landinfo.com/geo.htm
http://www.e-geos.it/documents.htm
http://www.ecognition.com/products/trial-software
http://www.cosmo-skymed.it/en/index.htm
http://earth.esa.int/EOLi/EOLi.html
http://www.array.ca/nest/tiki-index.php?page=NestSoftwareDownloads
http://www.creaso.com/english/12_swvis/13_envi/SARscape/sarscape.htm
http://europa.eu.int
http://reports.eea.europa.eu/COR0-landcover/en (Corine Land Cover)
41
APPENDIX 1_ CORINE Land Cover 2000
European Union's CORINE (Coordination of Information on the Environment) LandCover2000
(Neumann et al., 2007) classification system (available at http://reports.eea.europa.eu/COR0-
landcover/en).
LAND COVER CLASSES
Class 1: Artificial Areas (Urban)
Class 1.1 Urban fabric
Areas mainly occupied by dwellings and buildings used by administrative/public utilities or
collectivities, including their connected areas (associated lands, approach road network, parking-
lots).
111 Continuous urban fabric
Most of the land is covered by structures and the transport network. Building, roads and
artificially surfaced areas cover more than 80 % of the total surface. Non-linear areas of
vegetation and bare soil are exceptional.
112 Discontinuous urban fabric
Most of the land is covered by structures. Building, roads and artificially surfaced areas
associated with vegetated areas and bare soil, which occupy discontinuous but significant
surfaces.
Class 1.2 Industrial, commercial and transport units
Areas mainly occupied by industrial activities of transformation and manufacturing, trade,
financial activities and services, transport infrastructures for road traffic and rail networks,
airport installations, river and sea port installations, including their associated lands and access
infrastructures. Includes industrial livestock rearing facilities.
42
121 Industrial or commercial units.
Artificially surfaced areas (with concrete, asphalt, tarmacadam, or stabilised,
e.g. beaten earth) without vegetation occupy most of the area, which also
contains buildings and/or vegetation.
122 Road and rail networks.
Motorways and railways, including associated installations (stations, platforms,
embankments). Minimum width for inclusion: 100 m.
Class 1.4 Artificial non-agricultural vegetated areas.
Areas voluntarily created for recreational use. Includes green or recreational and leisure
urban parks, sport and leisure facilities.
Class 2: Agricultural areas
Class 2.1 Arable land.
Lands under a rotation system used for annually harvested plants and fallow lands, which are
permanently or not irrigated. Includes flooded crops such as rice fields and other inundated
croplands.
o 211 Non-irrigated arable land.
o 212 Permanently irrigated land.
Class 2.2 Permanent crops.
All surfaces occupied by permanent crops, not under a rotation system. Includes ligneous crops
of standards cultures for fruit production such as extensive fruit orchards, olive groves, chestnut
groves, walnut groves shrub orchards such as vineyards and some specific low-system orchard
plantation, espaliers and climbers.

43
o 221 Vineyards.
o 222 Fruit trees and berry plantations.
o 223 Olive groves.
Class 2.3 Pastures.
Lands, which are permanently used (at least 5 years) for fodder production. Includes natural or
sown herbaceous species, unimproved or lightly improved meadows and grazed or mechanically
harvested meadows. (231 Pastures).
Class 2.4 Heterogeneous agricultural areas.
Areas of annual crops associated with permanent crops on the same parcel, annual crops
cultivated under forest trees, areas of annual crops, meadows and/or permanent crops which are
juxtaposed, landscapes in which crops and pastures are intimately mixed with natural vegetation
or natural areas. (244 Agro-forestry areas)
Class 3: Bare soils
Land without vegetation cover, with or without atrophic activities.
Class 5: Water courses and water bodies
512 Water bodies.
Natural or artificial stretches of water.
511 Water courses.
Natural or artificial water-courses serving as water drainage channels. Includes canals
and Natural or artificial stretches of water. Minimum width for inclusion: 100 m.
44
APPENDIX 2 _ Presentation
Was made a oral presentation at CNR Montelibretti, Rome; Italy. This seminary was made in
framework of fellowship ASI-CONAE.














![Index [] · DOUBLE VITRAGE ISOLANT DE 1" (25,4 MM) D'ÉPAISSEUR HORS-TOUT,COMPRENANT UNEÉPAISSEUR DE VERRE DE 6 MM, 12 MM D'ESPACE D'AIR ET 6 MM DE VERRE 9.1.2.3 FlushGlaze BF 3400](https://img.pdfslide.net/doc/110x75/5fc5d28e2207c672ab5a9ee0/index-double-vitrage-isolant-de-1-254-mm-dpaisseur-hors-toutcomprenant.jpg)