Embed Size (px)
Citation preview

Towards smart sensing based on field-programmable technology
Wayne Luk Imperial College
28 January 2017

Outline
1. Smart sensing + field-programmable technology
2. Example: remote sensing
3. Acceleration: smart remote sensing
4. Monitoring: in-circuit assertions and exceptions
5. Summary
2
Acknowledgement: S.J. Wang, N. Ma, Y. Peng: Harbin Institute of Technology X. Niu, Tim Todman: Imperial College S. Stilkerich: Airbus E. Hung: Invionics P.H.W. Leong: University of Sydney

• self * (optimising+verifying) = trusted re-use - unify: autonomic, self-test, dynamic optim., run-time reconfig. - better design + more productive
1. Smart sensing: a vision

• self * (optimising+verifying) = trusted re-use - unify: autonomic, self-test, dynamic optim., run-time reconfig. - better design + more productive • self-optimising self-verifying design platform - systems based on field-programmable technology: large + small - autonomous system-on-chip + network of ASOCs - applications: ubiquitous, dependable, secure, robust
1. Smart sensing: a vision

Possible architecture
Self-Optimiser
Self-Verifier
Models: external + internal
Sensors: external + internal
New models
Outputs: external + internal

Possible architecture
Self-Optimiser
Self-Verifier
Models: external + internal
• 10-year advances: FPGA-based custom computing - self-optimization: machine learning - self-verification: in-circuit assertions and exceptions
Sensors: external + internal
New models
Outputs: external + internal

Custom computing
• conventional computing: fit program to processor
• custom computing: fit processor to program
• customise operation + data: field programmable technology
Program
Fixed Processor
Software Tools
Program
Software + Hardware
Tools
Customised Processor

FPGA: Field Programmable Gate Array
DSP Block
Block RAM (20TB/s)
IO Block Logic Cell (105 elements)
Xilinx Virtex-6 FPGA
DSP Block Block RAM
source: Maxeler

Accelerate clouds: Microsoft + Amazon
aws.amazon.com/ec2/instance-types/f1/
www.top500.org/news/microsoft-goes-all-in-for-fpgas-to-build-out-cloud-based-ai/

Bottleneck example: Bing page ranking
source: Microsoft
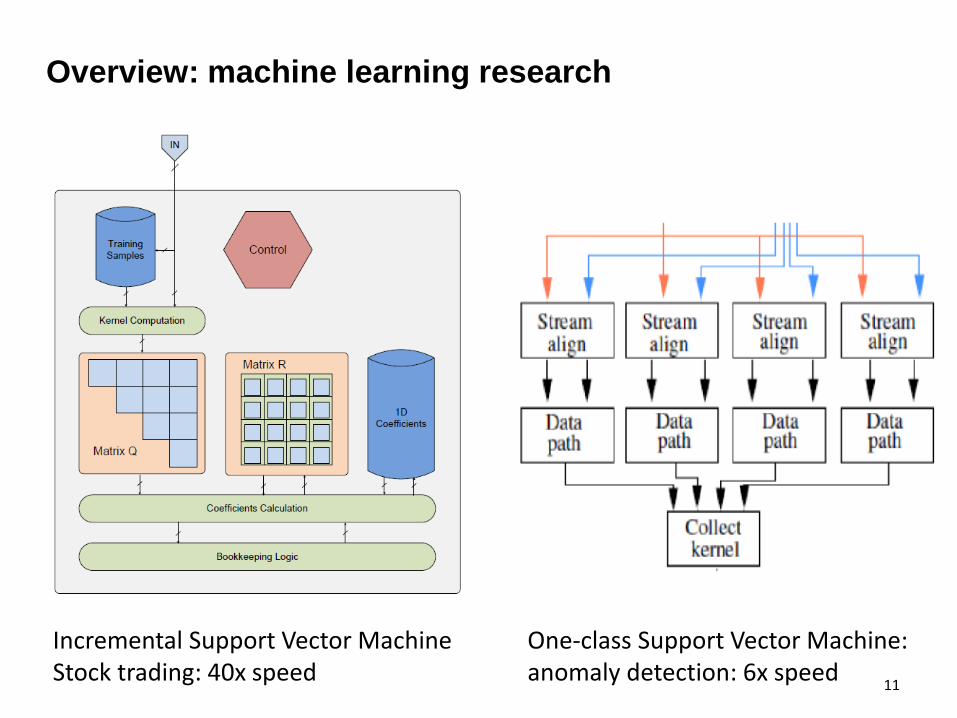
Overview: machine learning research
11
Incremental Support Vector Machine Stock trading: 40x speed
One-class Support Vector Machine: anomaly detection: 6x speed

Overview: machine learning research
12
Pipelined genetic propagation Travelling Salesman: 90x speed
Genetic programming Trading strategy: 3.5x returns

Overview: machine learning research
13
Inductive logic programming Mutagenesis: 30x speed
Sequential Monte Carlo Air traffic management: 5x aircraft

14
2. Example: remote sensing with hyperspectral imaging
Source: http://www.markelowitz.com/Hyperspectral.html
• spectral bands > 200 • Image data > 50GBps • downlink < 10Gbps

15
HyperSpectral image classification
Multiple sensor images One image Spectrum curve Pixel
Data cube Pseudo color image
Large computation under strict power constraint: 30Gops/s @20W

3. Accelerator design: why SVM classification?
16
Source: https://en.wikipedia.org/wiki/Support_vector_machine
2D Case H1 does not separate the classes. H2 does, but only with a small margin. H3 separates them with the maximum margin. SVM covers higher dimensions: hyperplanes.

1 vs 2 1vs3 7vs8
Voting
Not1 1vs4
2vs4 1vs3
3vs4 2vs3 1vs2
Not4
Not2 Not1 Not4
Not3
K(K-1)/2 K(K-1)/2 K-1
3. Accelerator design: multi-class SVM classifiers
17
1 vs all
2 vs all
K-1 vs all
Judge
One-Against-One One-Against-All Directed Acyclic Graph
• each class: possible interpretation of image pixel data • One-Against-One: higher accuracy when used with Hamming Distance

1 vs 2 1 vs 3 (K-1) vs K
Judge
OAO Multiple classifiers with Hamming Distance
0 1 2 T
0 1 2 T Hamming Distance 0 1 2 T
Class 1 ID
0 1 2 T
Class 2 ID
Class K ID
T+1 = K×(K-1)/2
Binary Classifiers (BC)
Hamming code
Class label
Image data
Hamming Distance of 2 strings: number of corresponding positions that are different. Compare 1 vs 2, 1 vs 3… results with an Identifying Code for Class 1; small Hamming Distance: image data pixel is in this class
from training

Pseudo code for multi class SVM classifier
19
Radial basis function
hyper- parameters, found by training
(Identify each class) (treat X as 0)

Accelerator Architecture
20 BC: Binary Classifier

Binary Classifier: datapath of kernel
21
Radial basis function
hyper- parameters, found by training

Evaluation
22
• hardware platform
• data sets
- Maxeler MAX4 DFE - Altera Stratix V 5SGSMD8N2F45C2 FPGA
- Airborne Visible Infra-Red Imaging Spectrometer (AVIRIS), Northwestern Indiana scene and Salinas Valley scene - 224 spectral bands - 16 classes
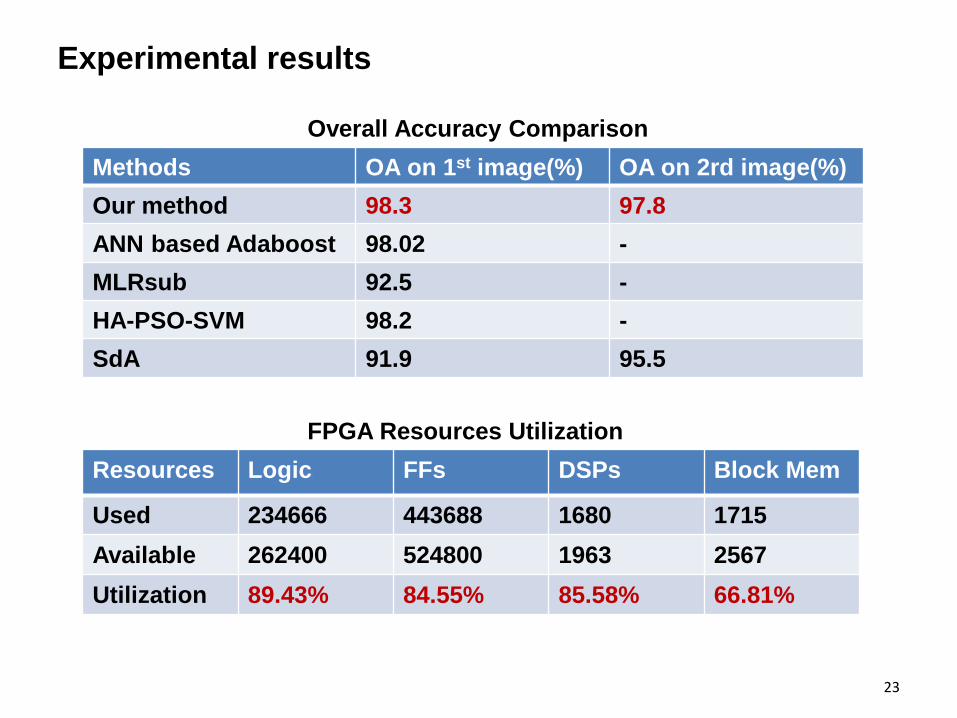
Experimental results
Methods OA on 1st image(%) OA on 2rd image(%) Our method 98.3 97.8 ANN based Adaboost 98.02 - MLRsub 92.5 - HA-PSO-SVM 98.2 - SdA 91.9 95.5
Overall Accuracy Comparison
Resources Logics FFs DSPs Block Mem
Used 234666 443688 1680 1715 Available 262400 524800 1963 2567 Utilization 89.43% 84.55% 85.58% 66.81%
FPGA Resources Utilization
23

Runtime and energy consumption comparison
Platform Zynq ARM DSP Xeon DFE T(μs/Pixel) 25.8 1321.2 65.8 14.1 0.99
Power(W) 3.9 3.3 16 95 26.3
E(mJ/Pixel) 0.1 4.3 1.05 1.33 0.03 Speedup 26.0 1334.5 66.4 14.2 1
• Zynq: XC7Z020 • ARM: Cortex A9 @667MHz • DSP: TMS320C6678 8 cores@1GHz • Xeon: Inter E5-2620 12cores, OpenMP optimized • DFE Running frequency: 120MHz • 8 Millions Pixels for Xeon test and 1 Million Pixels for others
24
25
• assertions – Boolean expressions – when true, circuit is behaving correctly – in-circuit: runs at same rate as rest of design – propagate to software as extra outputs
• exceptions – like software exceptions: allow errors to be handled – can replace erroneous value with safe one
4. Monitoring: in-circuit assertions and exceptions

26
Example: statistical assertions
• in-circuit – runs at user circuit speed – allows rapid self-adaptive hardware + software
• statistical
– adaptation can depend on signal statistics – assertion language e = a | uop e | e bop e | mean(e) | variance(e) | …
• implementation
– feedforward and feedback architectures of pairwise and linear algorithms
– allows more user choice in speed / area tradeoff

27
Statistical assertion: self-adaptive system

28
Case study: smart avionics
• air-speed sensor: Pitot tube • can fail when frozen
could still fail

29
True airspeed: statistical check
• true airspeed: important input to avionics • statistics on true airspeed: indicate sensor failure
– trigger self-adaptation • true airspeed datapath for sensor
– monitored by in-circuit variance operators
datapath

30
Assertion: resource required
• modest linear area cost per in-circuit assertion • calculate airspeed within hard real-time limit

31
Assertions: efficient implementation
• properties to be monitored – functional – statistical – timing
• run-time hardware monitoring – high-level description: assertion – same speed as hardware to be monitored – provably-correct optimisation – minimum area overhead: O(N) -> O(logN)

32
• obvious (S = )
• efficient
• proof: use algebraic transformations in Ruby language
Optimising assertion: correctness-preserving transformation

33
Assertions: efficient implementation
• properties to be monitored – functional – statistical – timing
• run-time hardware monitoring – high-level description: assertion – same speed as hardware to be monitored – provably-correct optimisation – minimum area overhead: O(N) -> O(logN)

34
Assertions: efficient implementation
• properties to be monitored – functional – statistical – timing
• run-time hardware monitoring – high-level description: assertion – same speed as hardware to be monitored – provably-correct optimisation – minimum area overhead: O(N) -> O(logN) -> O() – minimise compile time

35
Self-monitoring without overhead
• add monitoring to user design – introduce new circuit – without modifying user design – use only spare resources on chip
• accelerate monitoring circuit – pipeline its input connections

36 36
New design flow: resource-aware implementation
(XDL)

37
Self-monitoring circuitry: results
• pipeline circuits to added hardware to reduce / eliminate impact on timing
• up to 3.9 times faster on large circuits (LEON3 CPU) than re-compilation
Assertion: PC in range Assertion: statistics of AES output

38
Summary
• current and future work – tools: automate implementation and verification – applications: adaptive and resilient systems – extension: assertion management and optimisation – unification: with self-tuning control, self-aware systems… – prototyping: next-generation satellites, planes, drones…

39
Summary
• current and future work – tools: automate implementation and verification – applications: adaptive and resilient systems – extension: assertion management and optimisation – unification: with self-tuning control, self-aware systems… – prototyping: next-generation satellites, planes, drones…
• future smart sensing systems: field-programmable technology – machine learning: self-optimisation – assertion-based monitoring: self-verification – resource-aware implementation: reduced overhead





























