Embed Size (px)
Citation preview

1
TRABAJO COLABORATIVO 1
SISTEMAS DINAMICOS
HERMES ADRIAN BAREÑO GLEIDY JULIANA ALARCON LANCHEROS
NELSON ENRIQUE FIGUEROA CURSO 201527_26
TUTOR:
DIEGO FERNANDO SENDOYA
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA INGENIERIA ELECTRONICA
2013
2
INTRODUCCIÓN
En los sistemas dinámicos es importante representar los modelos físicos ya sea
mediante ecuaciones diferenciales, función de transferencia o también a través de
variables de estado [1]. Para la representación mediante ecuaciones diferenciales
es necesario modelar los sistemas mediante las leyes como lo son de
termodinámica, de circuitos eléctricos de newton entre otras. Para describir un
sistema mediante una función de transferencia se utilizan estas ecuaciones como
base; al igual que para la representación en espacio de estado [2], [3].
En este trabajo se presentan dos actividades, una teórica y una práctica, mediante
las cuales se analizan indirectamente las tres formas de representar los sistemas.
La actividad teórica es la forma clásica de encontrar la función de transferencia y de
espacio de estados. En la actividad práctica se utiliza la herramienta LabVIEW 2013
versión de prueba [4].
3
DESARROLLO DE LAS ACTIVIDADES
ACTIVIDAD TEORICA
Ejercicio 1: El control automático de la velocidad crucero es un excelente ejemplo
de un sistema de control retroalimentado que se encuentra en muchos de los
vehículos modernos. El propósito del sistema de control de la velocidad crucero es
mantener una velocidad constante del vehículo a pesar de las perturbaciones
externas, tales como cambios en el viento o en el tipo de carretera. Esto se logra
mediante la medición de la velocidad del vehículo, comparándola con la velocidad
deseada o de referencia, y ajustando automáticamente el acelerador de acuerdo
con una ley de control:
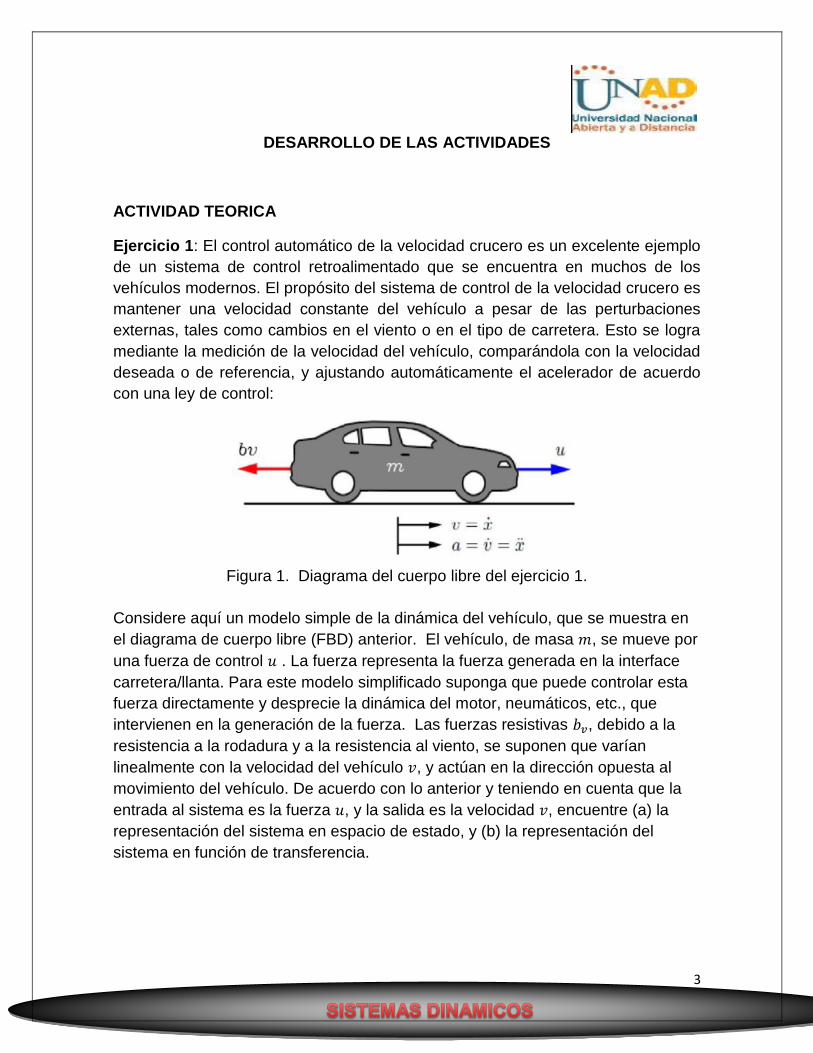
Figura 1. Diagrama del cuerpo libre del ejercicio 1.
Considere aquí un modelo simple de la dinámica del vehículo, que se muestra en
el diagrama de cuerpo libre (FBD) anterior. El vehículo, de masa 𝑚, se mueve por
una fuerza de control 𝑢 . La fuerza representa la fuerza generada en la interface
carretera/llanta. Para este modelo simplificado suponga que puede controlar esta
fuerza directamente y desprecie la dinámica del motor, neumáticos, etc., que
intervienen en la generación de la fuerza. Las fuerzas resistivas 𝑏𝑣, debido a la
resistencia a la rodadura y a la resistencia al viento, se suponen que varían
linealmente con la velocidad del vehículo 𝑣, y actúan en la dirección opuesta al
movimiento del vehículo. De acuerdo con lo anterior y teniendo en cuenta que la
entrada al sistema es la fuerza 𝑢, y la salida es la velocidad 𝑣, encuentre (a) la
representación del sistema en espacio de estado, y (b) la representación del
sistema en función de transferencia.

4
Solución:
(a). Teniendo en cuenta las ecuaciones de velocidad y aceleración respectivamente
𝑣 =𝑑𝑥
𝑑𝑡 , 𝑎 =
𝑑𝑣
𝑑𝑡=
𝑑2𝑥
𝑑𝑡2 se puede determinar el arreglo en espacio de estados, seguido
por el siguiente procedimiento:
- Se realiza la sumatoria de fuerzas según la segunda ecuación de Newton se
obtiene
𝑢 − 𝑏 ∗𝑑𝑥
𝑑𝑡= 𝑚 ∗
𝑑2𝑥
𝑑𝑡2
𝑑2𝑥
𝑑𝑡2=
−𝑏
𝑚
𝑑𝑥
𝑑𝑡+
𝑢
𝑚
Podemos usar la siguiente sustitución para variables de estado
𝑥1 = 𝑥
𝑑𝑥1
𝑑𝑡=
𝑑𝑥
𝑑𝑡= 𝑥2
𝑑2𝑥2
𝑑𝑡2=
−𝑏
𝑚𝑥2 +
𝑢
𝑚
Por lo tanto se tiene la siguiente representación en espacio de estados:
(
𝑑𝑥1
𝑑𝑡𝑑𝑥2
𝑑𝑡
) = (0 1
0−𝑏
𝑚
) (𝑥1
𝑥2) + (
01𝑚
) 𝑢
(b). Para obtener la función de transferencia se ordena la ecuación diferencial de la
siguiente manera,𝑑2𝑥
𝑑𝑡2 +𝑏
𝑚
𝑑𝑥
𝑑𝑡=
𝑢
𝑚, sin embargo como la salida es la velocidad y no la
posición, se ajusta la ecuación para poder encontrar la función de transferencia así:
𝑑𝑥2
𝑑𝑡+
𝑏
𝑚𝑥2 =
𝑢
𝑚
Ahora se pasa al dominio de Laplace
𝑠𝑋2 +𝑏
𝑚𝑋2 =
1
𝑚𝑈

5
𝑋2 [𝑠 +𝑏
𝑚] =
1
𝑚𝑈
𝑉
𝑈=
𝑋2
𝑈=
1/𝑚
𝑠 +𝑏𝑚
Y la ecuación de salida es: 𝑦 = (1 0) (𝑥1𝑥2
)
Ejercicio 2: Un actuador común en los sistemas de control es el motor DC. Este provee directamente movimiento rotatorio y, junto con las ruedas o tambores y cables, puede proporcionar un movimiento de traslación. El circuito eléctrico equivalente de la armadura y el diagrama de cuerpo libre del rotor se muestra en la siguiente figura siguiente:
Figura 2. Diagrama del Sistema Electromecánico.
Suponga que la entrada del sistema es la fuente de voltaje,𝑣, aplicada a la armadura del motor, mientras que la salida es la velocidad de rotación del eje 𝜔. El rotor y el eje se suponen rígidos. Suponga además un modelo de fricción viscosa, es decir, el torque de fricción es proporcional a la velocidad angular del eje.
Los parámetros a tener en cuenta son:
𝐽: Momento de inercia del rotor
𝑏: Coeficiente de amortiguamiento
𝐾𝑒: Constante de fuerza electromotriz
𝐾𝜏: Constante de torque del motor
𝑅: Resistencia eléctrica
𝐿: Inductancia eléctrica

6
De acuerdo con lo anterior, encuentre (a) la representación del sistema en espacio
de estado, y (b) la representación del sistema en función de transferencia.
Solución:
(a). Tomando como variables de estado la velocidad angular 𝜔(𝑡) y la corriente a
través de la armadura 𝑖(𝑡) del motor eléctrico.
En este sistema la potencia eléctrica es convertida en potencia mecánica, por
consiguiente la potencia útil será la corriente de la armadura por la fuerza contra
electromotriz [5].
𝑃𝑒𝑙é𝑐𝑡𝑟𝑖𝑐𝑎 = 𝑖(𝑡)𝜔(𝑡) = 𝑖(𝑡)𝐾𝜏𝜔(𝑡)
𝑃𝑚𝑒𝑐á𝑛𝑖𝑐𝑎 = 𝑇𝑚𝜔(𝑡) = 𝑖(𝑡)𝐾𝑒𝜔(𝑡)
Como la potencia eléctrica es aproximadamente igual a la mecánica podemos
igualar las dos ecuaciones anteriores así:
𝑖(𝑡)𝐾𝜏𝜔(𝑡) = 𝑖(𝑡)𝐾𝑒𝜔(𝑡)
𝐾𝜏 = 𝐾𝑒 = 𝑘
La ecuación correspondiente a la velocidad angular en el eje del motor es:
𝐽𝑑𝜔
𝑑𝑡+ 𝑏 ∗ 𝜔(𝑡) = 𝐾 ∗ 𝑖(𝑡)
𝑑𝜔
𝑑𝑡+
𝑏
𝐽𝜔(𝑡) =
𝐾
𝐽𝑖(𝑡)
De la ecuación de malla se tiene:
𝐿𝑑𝑖
𝑑𝑡+ 𝑅 ∗ 𝑖(𝑡) + 𝐾 ∗ 𝜔(𝑡) = 𝑣
𝑑𝑖
𝑑𝑡+
𝑅
𝐿𝑖(𝑡) +
𝐾
𝐿𝜔(𝑡) =
𝑣
𝐿
De estas dos ecuaciones diferenciales se obtiene la representación en espacio de
estados, la representación en espacio de estados es la siguiente.

7
(
𝑑𝜔𝑑𝑡𝑑𝑖𝑑𝑡
) = (−
𝑏
𝐽
𝐾
𝐽
−𝐾
𝐿−
𝑅
𝐿
) (𝜔(𝑡)
𝑖(𝑡)) + (
01𝐿
) 𝑣(𝑡)
(b). Aplicando la transformada de Laplace a las ecuaciones diferenciales anteriores
(velocidad angular y corriente en el eje del motor), con condiciones de reposo inicial
se tienen las siguientes expresiones:
La ecuación de malla en el dominio de Laplace es:
𝑠 ∗ 𝐼 +𝑅
𝐿∗ 𝐼 +
𝐾
𝐿∗ 𝜔 =
𝑉
𝐿
𝐼 [𝑠 +𝑅
𝐿] =
𝑉
𝐿−
𝐾
𝐿 𝜔
𝐼 =𝑉 − 𝐾 ∗ 𝜔
𝑅 + 𝑠𝐿
La ecuación de pares en el dominio de Laplace es:
𝑠 ∗ 𝜔 +𝑏
𝐽𝜔 =
𝐾
𝐽∗ 𝐼
Reemplazando la ecuación de la corriente en la ecuación anterior se obtiene:
𝑠𝜔 +𝑏
𝐽𝜔 =
𝐾
𝐽[𝑉 − 𝐾𝜔
𝑅 + 𝑠𝐿]
𝑠𝜔 +𝑏
𝐽𝜔 +
𝐾𝜔
𝐽(𝑅 + 𝑠𝐿)=
𝐾
𝐽
𝑉
(𝑅 + 𝑠𝐿)
𝜔 [𝑠 +𝑏
𝐽+
𝐾
𝐽(𝑅 + 𝑠𝐿)] =
𝐾
𝐽
𝑉
(𝑅 + 𝑠𝐿)
𝜔
𝑉=
𝐾
𝐽𝑠(𝑅 + 𝑠𝐿) + 𝑏(𝑅 + 𝑠𝐿) + 𝐾
𝜔
𝑉=
𝐾
𝑠2𝐽𝐿 + 𝑠(𝐽𝑅 + 𝑏𝐿) + 𝑏𝑅 + 𝐾
8
ACTIVIDAD PRÁCTICA
Ejercicio 1: Con los resultados obtenidos en el Ejercicio 1 de la Actividad Teórica,
utilice LabVIEW® para: (a) Obtener la representación del sistema en espacio de
estado, y (b) convertir el resultado del inciso (a) en una función de transferencia.
Para ello, suponga que los parámetros del sistema son:
Masa del vehículo m= 1000 kg
Coeficiente de amortiguamiento b= 50 N.s/m
Solución:
(a). En la siguiente figura se muestra la implementación del ejercicio1 en LabVIEW
versión de prueba.
Figura 3. Implementación del ejercicio 1 en LabVIEW.
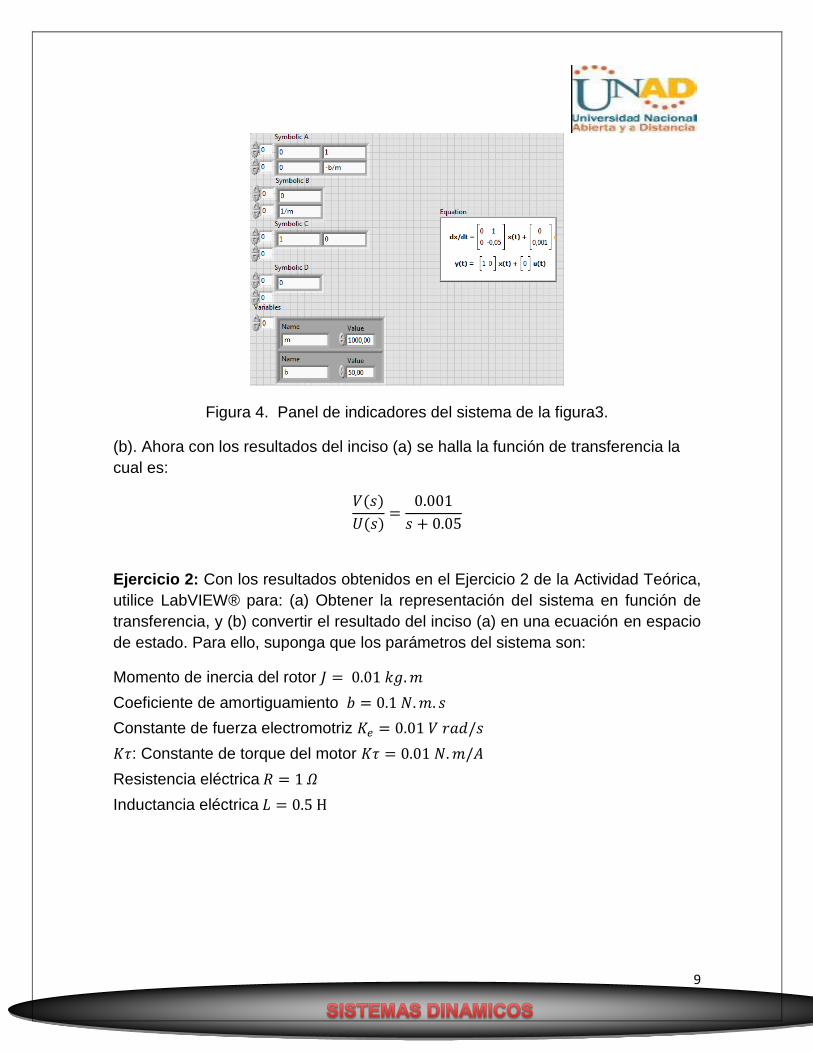
En la figura 4 se observa el panel de control de los valores de las constantes y
variables que corresponden al ejercicio 1 de la actividad práctica. En esta se
observan al lado izquierdo los arreglos de las matrices de entrada A, B y salida C,
D con sus respectivos indicadores; además las variables b y m. En la parte derecha
de la misma gráfica se puede ver el resultado el cual esta nombrado como Ecuación,
ahí está la ecuación de estados y la ecuación de salida en forma matricial.
9
Figura 4. Panel de indicadores del sistema de la figura3.
(b). Ahora con los resultados del inciso (a) se halla la función de transferencia la
cual es:
𝑉(𝑠)
𝑈(𝑠)=
0.001
𝑠 + 0.05
Ejercicio 2: Con los resultados obtenidos en el Ejercicio 2 de la Actividad Teórica,
utilice LabVIEW® para: (a) Obtener la representación del sistema en función de
transferencia, y (b) convertir el resultado del inciso (a) en una ecuación en espacio
de estado. Para ello, suponga que los parámetros del sistema son:
Momento de inercia del rotor 𝐽 = 0.01 𝑘𝑔. 𝑚
Coeficiente de amortiguamiento 𝑏 = 0.1 𝑁. 𝑚. 𝑠
Constante de fuerza electromotriz 𝐾𝑒 = 0.01 𝑉 𝑟𝑎𝑑/𝑠
𝐾𝜏: Constante de torque del motor 𝐾𝜏 = 0.01 𝑁. 𝑚/𝐴
Resistencia eléctrica 𝑅 = 1 𝛺
Inductancia eléctrica 𝐿 = 0.5 H
10
Solución:
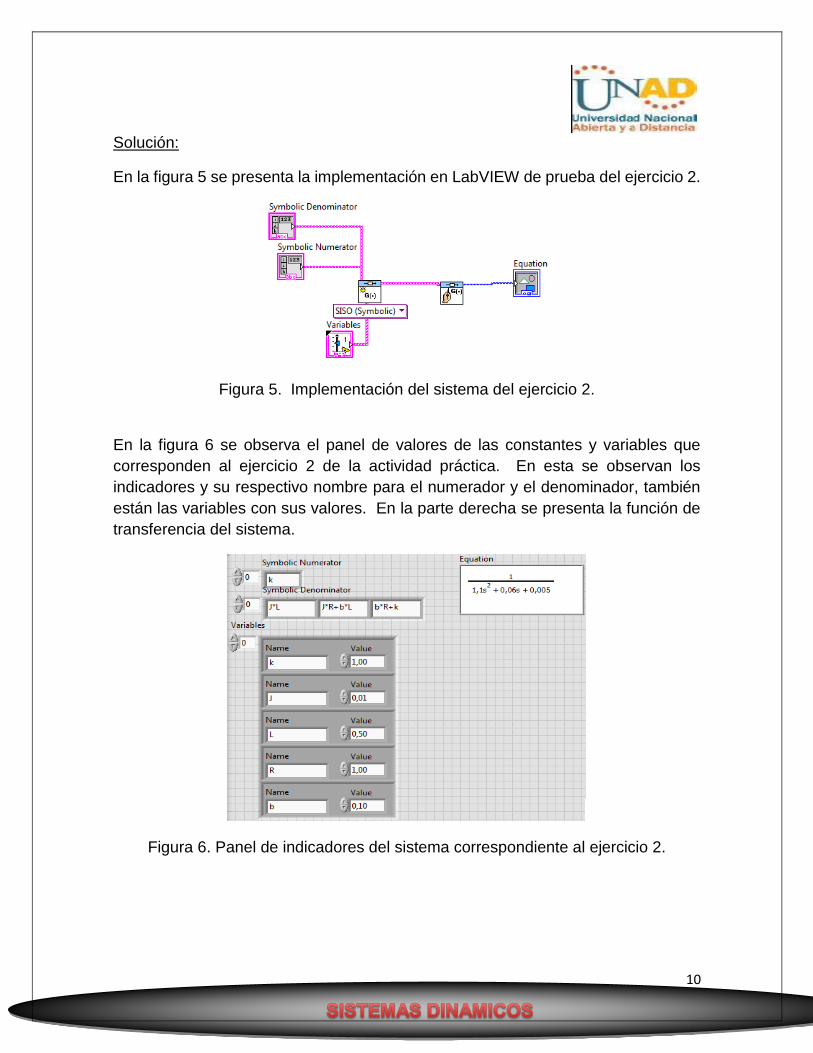
En la figura 5 se presenta la implementación en LabVIEW de prueba del ejercicio 2.
Figura 5. Implementación del sistema del ejercicio 2.
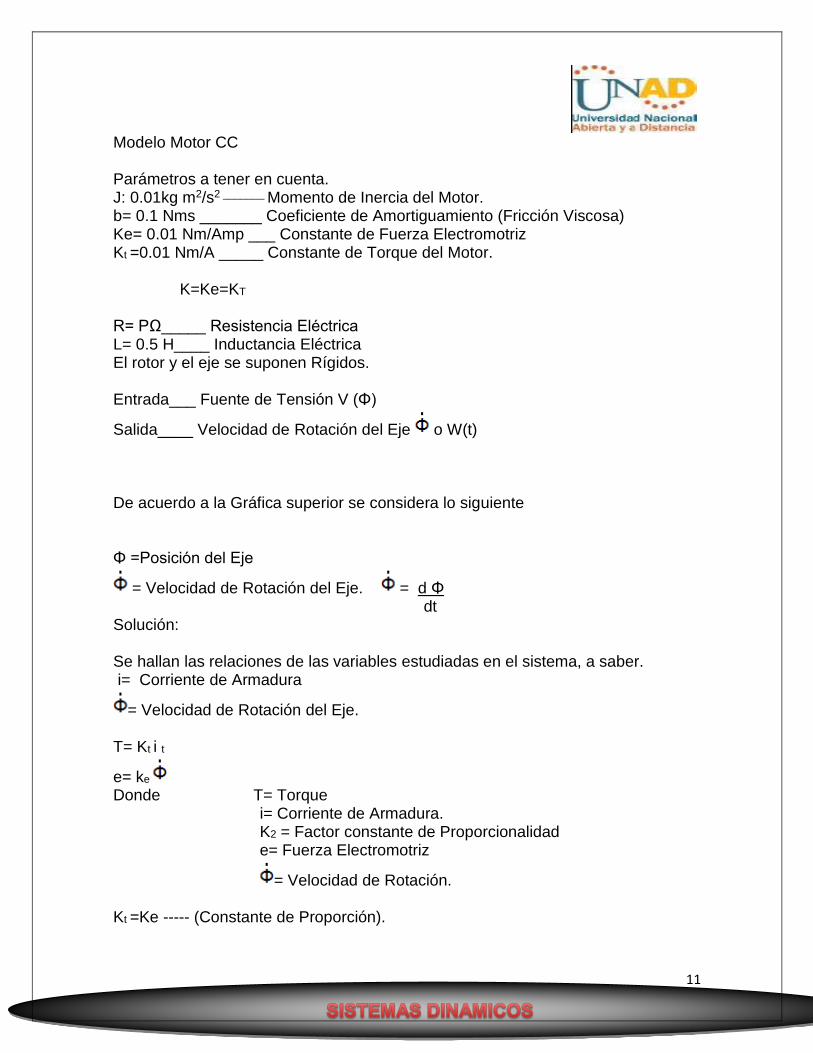
En la figura 6 se observa el panel de valores de las constantes y variables que
corresponden al ejercicio 2 de la actividad práctica. En esta se observan los
indicadores y su respectivo nombre para el numerador y el denominador, también
están las variables con sus valores. En la parte derecha se presenta la función de
transferencia del sistema.
Figura 6. Panel de indicadores del sistema correspondiente al ejercicio 2.
11
Modelo Motor CC Parámetros a tener en cuenta. J: 0.01kg m2/s2 _______ Momento de Inercia del Motor. b= 0.1 Nms _______ Coeficiente de Amortiguamiento (Fricción Viscosa) Ke= 0.01 Nm/Amp ___ Constante de Fuerza Electromotriz Kt =0.01 Nm/A _____ Constante de Torque del Motor. K=Ke=KT
R= PΩ_____ Resistencia Eléctrica L= 0.5 H____ Inductancia Eléctrica El rotor y el eje se suponen Rígidos. Entrada___ Fuente de Tensión V (Φ)
Salida____ Velocidad de Rotación del Eje o W(t) De acuerdo a la Gráfica superior se considera lo siguiente Φ =Posición del Eje
= Velocidad de Rotación del Eje. = d Φ dt Solución: Se hallan las relaciones de las variables estudiadas en el sistema, a saber. i= Corriente de Armadura
= Velocidad de Rotación del Eje. T= Kt i t
e= ke
Donde T= Torque
i= Corriente de Armadura. K2 = Factor constante de Proporcionalidad e= Fuerza Electromotriz
= Velocidad de Rotación. Kt =Ke ----- (Constante de Proporción).

12
Se deducen las Ecuaciones del Motor relacionando la velocidad Angular
J + b = K i (t) Ley de Newton
+ b = K i (t) J J Se deduce la Ecuación de la Malla
L di(t) +Ri (t)+ K = V(t) dt Ley de Kirchhoff
L di (t) + Ri(t) =V(t) - K dt Calculando la transformada de la place.
Para 1. + b = K i (t) J J S2Φ (s) + b S Φ(s) = k I(s) ------ S2 j Φ(s) + bs Φ (s) =KI(s) J J
Para 2. L di(t) + Ri (t) =V (t) - K dt LSI (S) +RI(S) = V(S) – KSΦ (S). De las expresiones calculadas en terciarios de S para la velocidad de Rotación del
eje y la corriente armadura i(s), se puede eliminar I(s) para obtener la función de transferencia del Sistema. Φ(s) =_____K_________ Donde Φ(s) ---- Salida de Sistema V(s) ( J s+b) (LS+R) +K2 V(s) ---- Entrada del sistema (Js+b)(LS+R)+K2 = JLS2 + RJS + bLS + bR + K2 JLS2 + (RJ+ bL) S + (bR + K2) = S2 + (RJ + bL) S+ (bR+K2) ____ %JL JL JL El anterior procedimiento es para garantizar que la ecuación Característica del sistema sea una expresión “Mónica”, quedando de la siguiente forma. 1 K Φ(s) = ______ JL___________ V(s) S2 + RJ +bL S + bR + K2 Función de Transferencia del Sistema JL JL Donde J, K, R n b Son valores conocidos.
13
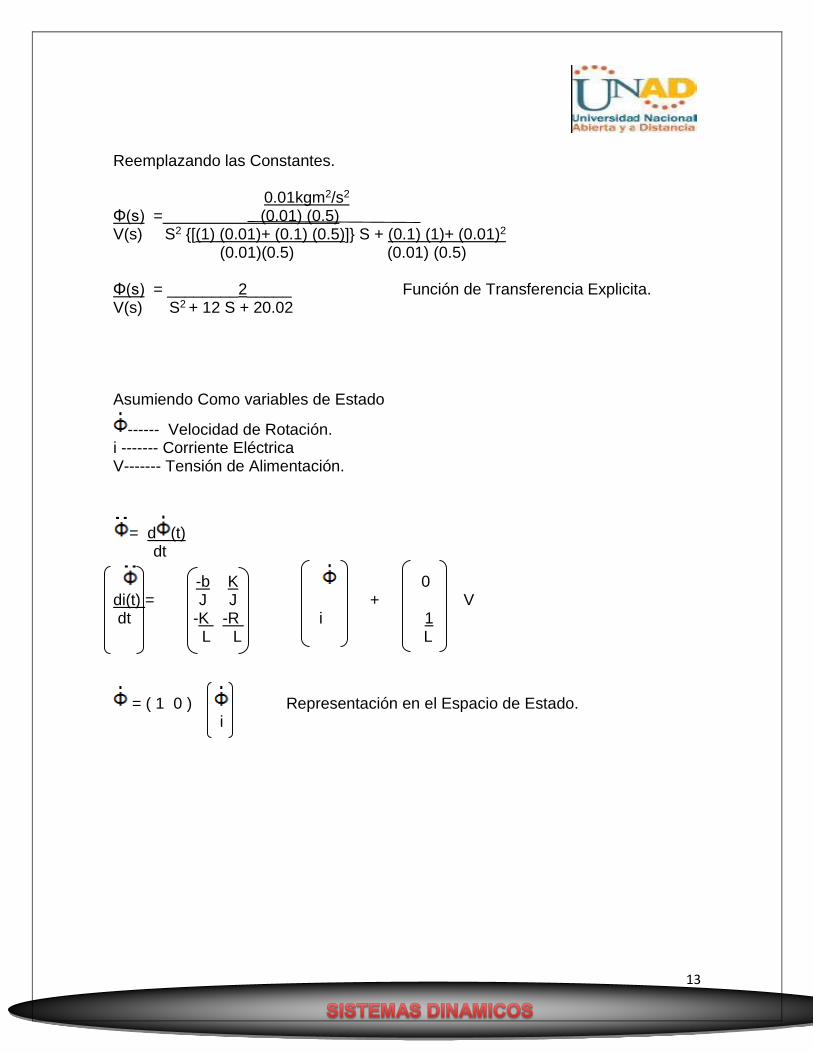
Reemplazando las Constantes. 0.01kgm2/s2 Φ(s) = (0.01) (0.5) V(s) S2 [(1) (0.01)+ (0.1) (0.5)] S + (0.1) (1)+ (0.01)2
(0.01)(0.5) (0.01) (0.5) Φ(s) = ________2_____ Función de Transferencia Explicita. V(s) S2 + 12 S + 20.02 Asumiendo Como variables de Estado
------ Velocidad de Rotación. i ------- Corriente Eléctrica V------- Tensión de Alimentación.
= d (t) dt
-b K 0 di(t) = J J + V dt -K -R i 1 L L L
= ( 1 0 ) Representación en el Espacio de Estado. i
14
CONCLUSIONES
- Modelar sistemas físicos y en particular de características eléctricas permite
el afianzamiento en los temas relacionados a la profesión.
- El uso de ecuaciones diferenciales y expresiones matemáticas en general
ayuda al entendimiento y a la interpretación de sistemas eléctricos
estudiados.
- Por medio de estudios de control sobre sistemas físicos se logra predecir el
comportamiento intrínseco del sistema.
- La herramienta de Labview es de utilidad, para encontrar sea la función de
transferencia a partir del modelo de espacio de estados, o inversa; además
se puede analizar el comportamiento de un sistema dinámico variando sus
parámetros mediante su correspondiente indicador como se puede ver en las
figuras 4 y 6.
15
BIBLIOGRAFÍA
[1] UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD, «SISTEMAS
DINÁMICOS».
[2] «http://www.esi2.us.es/~danirr/apuntesIC4.pdf,» [En línea]. Available:
http://www.esi2.us.es.
[3] «http://www.ulsa.edu.ni/publicaciones/-III-Anio/Plan-Diario-III-
Cuatrimestre/Sistemas_de_Control/Clase02-Espacio_deEstados.pdf,» [En
línea].
[4] «http://colombia.ni.com/,» [En línea].
[5] K. OGATA, Ingeniería de Control Moderna.




























