Embed Size (px)
Citation preview

Transonic Aeroelasticity: Theoretical and Computational Challenges
Oddvar O. Bendiksen
Department of Mechanical and Aerospace EngineeringUniversity of California, Los Angeles, CA
Aeroelasticity Workshop
DCTA - BrazilJuly 1-2, 2010

O. Bendiksen UCLA
Introduction
• Despite theoretical and experimental research extending over more than 50 years, we still do not have a good understanding of transonic flutter
• Transonic flutter prediction remains among the most challenging problems in
aeroelasticity, both from a theoretical and a computational standpoint
• Problem is also of considerable practical importance, because
- Large transport aircraft cruise at transonic Mach numbers - Supersonic fighters must be capable of sustained operation near Mach 1,
where the flutter margin often is at a minimum

O. Bendiksen UCLA
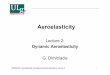
Transonic FlutterNonlinear Characteristics
• For wings operating inside the transonic region , strong oscillating shocks appear on upper and/or lower wing surfaces during flutter
• Transonic flutter with shocks is strongly nonlinear
- Wing thickness and angle of attack affect the flutter boundary- Airfoil shape becomes of importance (supercritical vs. conventional)- A mysterious transonic dip appears in the flutter boundary- Nonlinear aeroelastic mode interactions may occur
Mcrit M∞ 1< <
0.8 0.90.7 1.0Mach No. M
Linear Theory
FlutterBoundary Transonic
Dip
Flutter
1
2
3SpeedIndex
UF
bωα µ------------------

O. Bendiksen UCLA
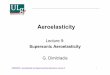
Transonic Dip Effect of Thickness and Angle of Attack
0
50
100
150
200
250
300
0.7 0.8 0.9 1 1.1 1.2Mach No. M
2%
4%
6%
8%
Dynamic pressure at flutter vs. Mach number for a swept series of wings of different airfoil thickness (Dogget, et al., NASA Langley)
Effect of angle of attack on experimental flutter boundary and transonic dip of NLR 7301 2D aeroelastic model tested at DLR (Schewe, et al.)

O. Bendiksen UCLA
Objectives of Lecture
• Attempt a theoretical explanation of the key characteristics of transonic flutter and the transonic dip
• Explain the mechanism responsible for the observed sensitivity to wing thickness
and angle of attack • Provide an overview of the main theoretical and computational challenges, illus-
trated through examples

O. Bendiksen UCLA
Research ChallengesMotivating Questions
• Theoretical: “Understanding” Transonic Flutter- Is there a rational explanation for the location and shape of the transonic dip?
- Why is the dip markedly different from wing to wing?
- Can all transonic flutter instabilities be predicted by formulating and solving a linearized aeroelastic eigenvalue problem?
- How do we distinguish between flutter and aeroelastic (forced) response?
• Computational: Predicting Transonic Flutter- What level of modeling is necessary?
- Why do different codes based on similar CFD yield different predictions?- Why are LCO amplitudes so difficult to predict?- When do we need to use nonlinear structural models?

O. Bendiksen UCLA
Observations
• Linear methods do a reasonable job of capturing the correct flutter behavior of wings in subsonic and supersonic flows, outside the transonic region
• The theoretical basis for this success is the Hopf bifurcation model for classical
flutter, based on a valid linearization of the aeroelastic equations:
• The validity of the Hopf linearization is crucial here:
The existence and uniform validity of the Jacobian matrix form the basis for the theory
- Regular perturbation problems generally satisfy linearization assumptions - Singular perturbation problems do not permit a uniformly valid linearization- Strongly nonlinear problems often cause extra grief
x· F x λλλλ,( )=x· A λλλλ( )x f x λλλλ,( )+=
A λλλλ( )

O. Bendiksen UCLA
Examples of Singular Problems(Fluid Dynamics)
• Flows at low Reynolds numbers (cumulative/secular type singularity)
- Stokes’ linearized solution is not uniformly valid (far field singularity) - Stokes’ Paradox was identified and corrected by Oseen
• Flows at high Reynolds numbers (layer type singularity)
- Limit of zero viscosity yields Euler equations (different boundary conditions) - Small viscosity requires a boundary layer near body to satisfy no slip b.c.
• Supersonic flow wave structure (cumulative type singularity)
- Linarized Ackeret solution is correct near body, but fails in the far field- In linear solution, weak shocks never coalesce (straight characteristics)- In actual flow, weak shocks always coalesce (cumulative nonuniformity)
• Flows at transonic Mach numbers (cumulative type singularity)
- Linearized solution is not uniformly valid, even near the body - Nonuniformities occur both in space and time- Nonuniformities affect validity of Hopf linearization in flutter calculations

O. Bendiksen UCLA
Theoretical IssuesLinearized Flutter Analysis
• Nonlinear Aeroelastic Models:
• Linearization hypothesis (Hopf bifurcation)
• For hyperbolic equilibrium points, stability near is determined by the eigenvalues of (Hartman-Grobman)
• Recent results suggest that the Hopf linearization breaks down in the strongly nonlinear transonic region, in and near the transonic dip
x· F x λλλλ,( )=x· ℵℵℵℵ xt λλλλ,( )=
xt s( ) x t s+( ) ∞– s 0≤<,=
x· A λλλλ( )x f x λλλλ,( )+=
x 0=A

O. Bendiksen UCLA
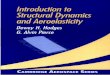
The Hopf BifurcationClassical Viewpoint
• Comes in two flavors
-Supercritical (soft flutter)-Subcritical (hard flutter)
• Implies that small limit cycles do exist near linear flutter boundary,but assumes that
- linearization is possible-no nonuniformities occur on the time scale
a
b
A
A1
A
A1
A1cr
a
b
c
d
Line
ar fl
utte
r bou
ndar
y
c
UUUF U1 UFU1U*
e
a) Supercritical b) Subcritical

O. Bendiksen UCLA
Linearization HypothesisA Closer Look
• At Mach numbers outside the transonic region, the unsteady aerodynamic prob-lem can be linearized and the velocity potential expanded in a regular asymptotic series:
where is a thickness parameter of the wing • In the transonic region this “regular expansion” procedure fails, because the
magnitudes of certain neglected terms have grown to order one • To fix the problem one can use strained coordinates and a nonlinear perturbation
expansion of the form
• The distinguished limit results in the following scaling relationships:
Φ U∞ x ε1 δ( )ϕ1 x y z t, , ,( ) ε2 δ( )ϕ2 x y z t, , ,( ) …+ + +{ }=
δ
y λ δ( )y;= z λ δ( )z;= t τ δ( )t=
Φ U∞ x ε δ( )ϕ1 x y z t χ, , , ,( ) …+ +{ }=
ε ν δ2 3/ ;= = λ δ1 3/=

O. Bendiksen UCLA
Transonic AerodynamicsLimit Process Expansion
• The most general (small-disturbance) equation for the leading term is obtained by retaining certain higher-order terms:
where and are transonic similarity parameters
• Note: The first-order equation is nonlinear, even in the limit • No linearization is possible without introducing nonuniformities and destroying
some of the essential physics; e.g. proper modeling of upstream wave propaga-tion, parametric excitation, etc.
• Transonic flutter problem is a singular perturbation problem of the cumulative type (using classification terminology of Cole, Hayes, and Lagerstrom)
ϕ ϕ1≡
χ ∂ϕ∂x------– γ 1–
γ 1+----------- τ
U∞--------∂ϕ
∂ t------– ∂2ϕ
∂x2--------- ∂2ϕ∂y2--------- ∂2ϕ
∂z2--------- 2U∞-------- ∂
2ϕ∂x∂ t-----------– τ
U∞2--------∂
2ϕ∂ t2---------–+ 0=+
χ τ
χ1 M∞
2–
γ 1+( )M∞2 δ[ ]2 3⁄-----------------------------------------;= τ δ2 3⁄
γ 1+( )M∞2[ ]1 3⁄-------------------------------------=
δ α w 0→, ,

O. Bendiksen UCLA
Hopf Linearization BreakdownStrongly Nonlinear Transonic Region
• Linearization is based on assumption that we can write
where as and is a measure of wing amplitude(s)
• But this assumption contradicts the known facts about transonic aerodynamics
• If we attempt a perturbation solution
then cannot be expected to satisfy the linearized equation
because the aerodynamic forces are governed by nonlinear equations, even in the limit of small disturbances ( )
• The Hopf linearization breaks down because the transonic aerodynamics prob-lem cannot be linearized without introducing nonuniformities on the time scale
x· A λλλλ( )x ε δ( )g x λλλλ,( )+=
ε δ( ) 0→ δ 0→ δ
x t( ) x0 t( ) ε1x1 t( ) …+ +=
x0 t( )x· A λλλλ( )x=
δ 0→

O. Bendiksen UCLA
Crime and Punishment
• Classical linear flow theory breaks down in the transonic region, near Mach 1, resulting in a singularity ( ) at Mach 1
• The breakdown is of a mathematical rather than a physical nature (magnitudes
of certain terms have been estimated incorrectly) • Blowup at Mach 1 is related to the use of a linear governing equation, which only
permits upstream disturbances to travel at a constant speed (linear acoustic speed of sound)
• Linearized solution is not uniformly valid in space and time
• To remove the infinities and nonuniformities we must allow the local speed of sound to vary as a nonlinear function of local disturbances, and this requires a nonlinear field equation for the fluid
1 1 M∞2–⁄

O. Bendiksen UCLA
Limitations of the Hopfian Viewpoint
• Recent computational results suggest that the Hopf bifurcation has its limitations
as a theoretical model for “explaining” all types of transonic flutter
• Nonlinear mode interactions and temporal nonuniformities can give rise to “non-classical” or “Non-Hopfian” flutter instabilities, such as-Delayed flutter-Dirty (almost periodic?) flutter-Period-tripling flutter

O. Bendiksen UCLA
Delayed FlutterAeroelastic mode is stable but not uniformly stable...
-0.1
-0.05
0
0.05
0.1
0 20 40 60 80 100Nondimensional time
h/b
θ
-0.2
-0.1
0
0.1
0 200 400 600 800Nondimensional time
h/b
θ
Short-term behavior Long-term behavior
• Do we really have to time-march over 20-300 flutter oscillations to determine stability?
• If flutter mode frequency is of the order of 1 Hz or less, delay before flutter onset could be as long as 20 seconds to 3 minutes!
NACA 0012 Model at Mach 0.80

O. Bendiksen UCLA
Delayed Flutter via LCOLCO is stable but not uniformly stable
-0.4
-0.2
0
0.2
0.4
0 200 400 600 800Nondimensional time
θ
h/b
x· A λλλλ τ,( )x f x λλλλ τ, ,( )+=τ εt,= ε 1«
Problem has two time scales:
Not classical Hopf
Parametric resonancesbecome possible
LCO transitioning to strong (delayed) flutter

O. Bendiksen UCLA
Quasiperiodic or AP(?) FlutterNon-Hopfian
(Mach 0.85)NACA 0012 BMM
a)
-0.04
-0.02
0.00
0.02
0.04
0E+0
1E-4
2E-4
3E-4
4E-4
0 200 400 600 800 1000Nondimensional time
θ
Etot
h/b
-0.02
-0.01
0
0.01
0.02
-0.04 -0.02 0 0.02 0.04
θ
h/b
-0.10
-0.05
0.00
0.05
0.10
0E+0
2E-4
4E-4
6E-4
8E-4
0 200 400 600 800 1000Nondimensional time
Etot
h/bθ
-0.02
-0.01
0
0.01
0.02
-0.04 -0.02 0 0.02 0.04
θ
h/b
c)
b) d)
Almost-periodic (?) or quasiperiodic (?) flutter of NACA 0012 model at Mach 0.85 and : a) at
(slightly below flutter boundary); b) at (slightly above flutter boundary); c-d)
corresponding phase plots.
µ 6=U 1.75=U 1.77=
U 1.75=
U 1.77=

O. Bendiksen UCLA
Period-Tripling FlutterTransonic Flutter at Low Mass Ratio
-0.02
-0.01
0
0.01
0.02
-0.04 -0.02 0 0.02 0.04
U 1.60=
θ
h b⁄
-0.04
-0.02
0
0.02
0.04
-0.08 -0.04 0 0.04 0.08
U 1.65=
h b⁄-0.02
-0.01
0
0.01
0.02
-0.04 -0.02 0 0.02 0.04
µ 6=U 1.75=
θ
h b⁄
-0.04
-0.02
0.00
0.02
0.04
0E+0
1E-4
2E-4
3E-4
4E-4
0 100 200 300 400Nondimensional time
θh/b
Etot
µ 5=U 1.60=
-0.02
-0.01
0
0.01
0.02
-0.04 -0.02 0 0.02 0.04
θ
h/b
µ 6=U 1.77=
-0.10
-0.05
0.00
0.05
0.10
0E+0
1E-3
2E-3
3E-3
4E-3
0 100 200 300 400Nondimensional time
Etot
h/b θ
U 1.65=

O. Bendiksen UCLA
Anomalous Mass Ratio ScalingNACA 0012 Model at Mach 0.85
0.0
2.0
4.0
6.0
8.0
0
50
100
150
200
250
1 10 100 1000 10000
qF
UFbωα----------
10UF
bωα µ------------------- UF
bωα-----------
µ
qF(psf)
Periodtriplingregion
Has practical consequences for transonic wind tunnel model construction...

O. Bendiksen UCLA
Similarity RulesTransonic Flow
χ1 M∞
2–
γ 1+( )M∞2 δ[ ]2 3⁄---------------------------------------- ,= A γ 1+( )M∞
2 δ[ ]1 3⁄ A=
α α δ⁄ ,= w w δ,⁄= t δ2 3⁄ tγ 1+( )M∞
2[ ]1 3⁄------------------------------------=
y (EA)x
z
U∞B x y t, ,( ) 0 z δ fu,l x y,( ) w y t,( ) xα y t,( )–[ ]
δ----------------------------------------------+
–= =
w y t,( )α y t,( ) α0 y( ) θ y t,( )+=
CLδ2 3⁄
γ 1+( )M∞2[ ]
1 3⁄-----------------------------------CL χ A α, ,( )= CMδ2 3⁄
γ 1+( )M∞2[ ]
1 3⁄-----------------------------------CM χ A α, ,( )=

O. Bendiksen UCLA
Similarity Rules and Scaling LawsTransonic Flutter
Flutter Similarity Parameter ψ U2
πµ γ 1+( )M∞2 δ[ ]
1 3⁄---------------------------------------------- qγ 1+( )M∞
2 δ[ ]1 3⁄---------------------------------------= =
UU∞
bωα----------=with and all aerodynamic similarity parameters fixed
q12---ρ∞
U∞2
12---mωα
2----------------- U2
πµ------- 1
π--- U
bωα µ------------------ 2
= = =Nondimensional dynamic pressure:
• In inviscid case, there are 3 primary similarity parameters: , and • In viscous case, the Reynolds number provides a 4th similarity parameter
χ Ψ, U

O. Bendiksen UCLA
Flutter Boundary as a Flutter Surfacevs. Two-Parameter (2D) Flutter Boundary Plots
M∞
µ
Ubωα----------
Planeµ µ0=
1.0
0.8
a
bµ1
µ2
µ0
M0 M1
M2
Flutter boundary as a surface in a 3D space of sim-ilarity parameters. The observed flutter boundaries in wind tunnel tests are represented by curves or paths (a,b, ...) on this surface, and may differ from test to test if the temperature changes.
0
0.2
0.4
0.6
0.8
1
0 0.2 0.4 0.6 0.8 1Mach No. M
(a) Flutter boundary for NACA 0006 model, corresponding to fixed mass ratio
(b) Corresponding boundary if and is decreased until flutter occurs (nonlinear Euler-based calculations).
µ 20=
U∞ a∞M∞=µ
UF
bωα µ------------------
(a) (c)
(b)

O. Bendiksen UCLA
Nature of Transonic Dip Appearance of “Almost Singular” Lift Curve Slope
0
50
100
150
200
0.5 0.6 0.7 0.8 0.9 1Mach No. M
NACA 0012
NACA 0006
NACA 0003
Prandtl-Glauert
1
10
100
1000
0.7 0.8 0.9 1Mach No. M
NACA 0012
NACA 0006
NACA 0003
Prandtl-Glauert
Almost singular behavior of the lift curve slopes of the NACA 00XX series of airfoils in transonic flow, and comparison with Prandtl-Glauert rule (Euler calculations).
a) Linear scale b) Logarithmic scale
CLα α 0= CLα α 0=

O. Bendiksen UCLA
Nature of Transonic Dip Almost Singular Lift Curve Slope - Experimental Data
Measured lift curve slope vs. Mach number for symmetric airfoils of different thickness ratios, at
, and comparison with the Prandtl-Glauert rule (original wind tunnel data from Göthert).α 0=
0.6
0.7
0.8
0.9
1
0 0.03 0.06 0.09 0.12 0.15
Wind Tunnel Data
Ref. 18
Ref. 25
Transonicscaling theory
Predicted vs. observed location of Mach number at which peaks, as a function of airfoil thickness.
CLα
δ
MTD
Mδpeak

O. Bendiksen UCLA
Transonic Flutter BoundaryEffect of Wing Thickness
Qualitative sketch of the effect of wing thickness on the transonic flutter boundaries.
1 M22–( ) M2
4 3/⁄
1 M12–( ) M1
4 3/⁄--------------------------------------
δ2δ1-----
2 3/
=
U1 bωα µ⁄ 1
U2 bωα µ⁄ 2--------------------------------
M22δ2
M12δ1
-------------
1 6/
=
δ
UF
bωα µ------------------
1.00.8 M∞
Boundary at t = 0;fixedBoundary
after manyflutter periods
Stable point enters flutter
Unstable pointis stabilizedδ1 δ2
δ3
UF
bωα µ------------------
1.00.8 M∞
δ1 δ2 δ3> >
Qualitative sketch of flutter boundary “drift” caused by nonuniformities on time scale

O. Bendiksen UCLA
Correlations with Wind Tunnel DataEffect of Wing Thickness
0
0.1
0.2
0.3
-2 0 2 4
4%
6%
8%
NASA Langley data, after applying the transonic similarity rules for flutter.
χ1 M∞
2–
γ 1+( )M∞2 δ[ ]
2 3⁄------------------------------------------=
100
150
200
250
300
0.7 0.8 0.9 1Mach No. M
4%
10%
10%p
Calculated vs. measured shift in flutter boundary when wing thickness in increased from 4% (circles) to 10% (diamonds). Open symbols represent wind tunnel data from Dogget, et al. (unswept series of wings); solid diamonds are predicted boundary based on similarity rules. Arrows connect aeroelastically similar points.
ψ
1π---
U∞
bωα µ------------------ 2
γ 1+( )M∞2 δ[ ]
1 3⁄------------------------------------------=

O. Bendiksen UCLA
Computational Challenges
• Despite all the CFD research over the past 30 years, we still do not have a good understanding of the essential requirements for a “good” nonlinear flutter code
• The chief challenges are associated with the problem of coupling CFD codes to FE structural codes:
1)Fluid-structure coupling2)Time synchronization3)Code validation
• Time synchronization is most important, because a “loosely coupled” aeroelastic code using classical modal coupling can be made to converge to an incorrect aeroelastic solution as the mesh is refined and the time-step is reduced

O. Bendiksen UCLA
Fluid-Structure Coupling
• Correct implementation of fluid-structure boundary conditions is of fundamental importance in aeroelastic stability calculations
• Both spatial compatibility and time synchronization requirements must be met, to assure that the time-marching simulations exhibit the physically correct stability behavior and LCO amplitudes
• Inconsistent or inaccurate implementations can result in a set of discretized eqs.
that are not dynamically equivalent to the “exact” aeroelastic model:
-May be missing some orbits (LCO/flutter) or fixed points (divergence) -May contain extraneous flutter orbits or divergences

O. Bendiksen UCLA
Current PracticeMost Codes
• In classical approach to time-marching flutter calculations, the equations for the fluid and structure are discretized and time-marched separately
• Most aeroelastic codes are implemented in this manner, using separate software modules for the fluid and structural domains- Codes are then coupled by imposing the kinematic boundary conditions- In “loosely coupled” schemes, strict synchronization is relaxed and the
coupling is accomplished in an approximate manner
• This approach is simpler to implement, but is known to lead to local spurious vio-lations of the conservation laws at the fluid-structure boundary

O. Bendiksen UCLA
Modal vs. Direct Approach
• For strongly nonlinear problems such as transonic flutter, the coupling problem becomes progressively more difficult if a modal approach is used- Higher-order modes tend to be highly “oscillatory”, and transonic CFD
codes are sensitive to rapid changes in surface slopes and curvatures- What modal amplitudes should be used in calculating the aero forces?- Superposition principle breaks down, and convergence becomes an issue
• These problems do not arise in the “direct” method of fluid-structure coupling
Oscillatory nature of higher-order natural modes of a low-aspect-ratio wing, and the sensitivity of higher mode shapes to small structural imperfections within normal manufacturing tolerances
-0.6
-0.5
-0.4
-0.3
-0.2
-0.1
0
-0.3
-0.2
-0.1
0
0.1
0.2
Mode 1 (bending) Mode 2 (torsion) Mode 63 (ideal structure) Mode 63 (real structure) 9.486Hz 40.767 Hz 2,444.6 Hz 2,450.7 Hz

O. Bendiksen UCLA
Fluid-Structure CouplingBasic Questions
• What is required to obtain reliable codes that exhibit the correct aeroelastic sta-
bility behaviors for a diverse class of problems? • How can (should) coupling schemes be validated?
• How should fluid-structure coupling schemes be formulated and implemented to obtain- High accuracy- Required consistency- High scalability

O. Bendiksen UCLA
Compatibility RequirementInviscid Flow
• Kinematic boundary condition of tangent flow is an implicit compatibility constraint between fluid and structural elements at the wing surface
• In the local element coordinates and shape functions of the FE at the wing sur-face, the compatibility constraint becomes
y
x
z
B(x,y,z,t) = 0
U∞
Typical structural finite element
ξ
ζη
w ξ ζ t, ,( )
12
3
h
w1
βx1
βy1
w3
w2
βy3
βy2
βx3
βx2
B∂t∂------ u B∇⋅+ DB
Dt--------≡ 0=
u3b Ni ξ ζ,( )
dqi t( )dt-------------- u1
b ∂Ni ξ ζ,( )∂ξ
---------------------- qi t( ) u2b ∂Ni ξ ζ,( )
∂ζ---------------------- qi t( )
i 1=
n∑+
i 1=
n∑+
i 1=
n∑=

O. Bendiksen UCLA
Asymptotic CompatibilityUsing Different Mesh Densities
• A common approach is to use a much finer mesh in the fluid domain than the cor-responding structural mesh at the boundary
• In this case compatibility errors can be shown to be of second order on the fluid
mesh, provided that all fluid nodes are properly coupled to structure (see figure)
• On structural mesh, errors are . As these errors can be made arbitrarily small (compatibility in an asymptotic sense)
• Convergence may still become an issue, because of Morawetz’s Theorem
Approximateboundary definedby fluid element
Fluid-structure boundarydefined by structuralFE solution
nth
n+1
structural node Floating fluid node
Structural boundary
n+1n
O l2 m2⁄( ) m ∞→

O. Bendiksen UCLA
Time SynchronizationBending-Torsion Model Problem
• Prototype typical section model problem with time lag :
where
• When time delays are present, characteristic equation changes from 4th degree algebraic equation with complex conjugate roots
to a transcendental equation of the form , where
with and . This equation has an infinite set of complex roots.
∆τ
1 xαxα rα
2
h·· τ( )b----------
α·· τ( )
γω2 0
0 rα2
h τ( )b----------
α τ( )
+ U2
πµ------- CL τ ∆τ–( )–
2CM τ ∆τ–( )
=
γω ωh ωα⁄ τ ωαt α· dα dτ⁄ U U∞ bωα⁄=;=;=;=
p1 2, p1Riω1
p3 4,
±p2R
iω2±==
P z ez,( ) 0=
P z w,( ) anmzmwn
n 0=
s∑
m 0=
r∑=
z p– ∆τ= w ez=

O. Bendiksen UCLA
ExamplesEffect of Time lag on V-g Diagram
-0.015
-0.01
-0.005
0
0.005
0 1 2 3 4
h
θ
-0.005
0
0.005
0 2 4 6 8 10
h/b
θ
U bωα⁄ U bωα⁄(a) (b)
∆t 0=
∆tTα25------=
∆tTα50------=
∆tTα100---------=
∆tTα25------=
∆tTα50------=
∆t 0=
∆tTα100---------=
Effect of time lag on aeroelastic stability: (a) stabilizing effect on typical section in incompressible flow, with quasistatic aerodynamics evaluated based on retarded structural state ( ; ; ; ; ); (b) destabilizing effect on typical section in supersonic flow (1st order piston theory;
; ; ; ; ; )
a 0.3–= xα 0.04= ωh ωα⁄ 0.6564= rα 0.5= µ 75=
M∞ 1.5= a 0.05–= xα 0.05= ωh ωα⁄ 0.5= rα 0.5= µ 75=

O. Bendiksen UCLA
Code Verification and ValidationA Significant Challenge in Transonic Aeroelasticity
• Verification: “Solving the equations right”
• Validation: “Solving the right equations”
• Separation of the verification and validation steps may be difficult in a real-world setting-What do we mean by “solving the equations right”? (Need to define “right”)-Numerical accuracy is always finite and “bugs” may be present-Aeroelastic solution still depends on the numerical scheme used and how
the fluid-structure coupling is implemented
• If a strict interpretation of “solving the equations right” is adopted, then the widely used “loosely coupled” codes can never be verified, far less validated
• For nonlinear transonic problems convergence becomes an issue, because sta-bility and consistency of the numerical scheme supply only necessary (but not sufficient) conditions for convergence (Lax equivalence theorem does not apply)

O. Bendiksen UCLA
Time-Marching Aeroelastic SolutionCFD-Based FE Model - Nonlinear Structural FE Model
x
y
z
Global Eulerian coordinate system
x′
y′
z′
Deformed elementUndeformed element
1
2
3
Local Lagrangian element coordinate system
12
3w1'
βy1'
βx1'
w3'
w2'
βx3'
βx2'
βy3'
βy2'u1'u2'
u3'v3'
v2'
v1'
Mindlin-Reissner FE

O. Bendiksen UCLA
Direct Fluid-Structure Coupling
Mapping of aerodynamic cell faces and structural elements at the fluid-structure boundary
a) b)
Fluid Node Mapping
Determine in which structural FEfluid node belongs
Calculate position of nodein terms of FE area coords Ai
FE Gaussian Point Mapping
Determine on which fluid ele-ment face GP resides
Calculate position of GPin terms of fluid face area coords

O. Bendiksen UCLA
NLR 7301 Unswept WingSchewe, et al.

O. Bendiksen UCLA
NLR 7301 Wing Section Validation DilemmaTransonic LCO: Theory vs. Experiment
-0.04
-0.02
0.00
0.02
0E+0
2E-3
4E-3
6E-3
8E-3
0 100 200 300 400 500 600Nondimensional time
Etot
h/b
θ
-0.04
-0.02
0.00
0.02
0E+0
2E-3
4E-3
6E-3
8E-3
0 200 400 600 800Nondimensional time
Etot
h/b
θ
Table 1: LCO Predictions vs. experiment for MP 77
Source
Fig. 12b) 0.750 0.203 0.21 deg 1.37 0.781 9 deg
Fig. 12d) 0.768 0.203 0.26 deg 1.42 0.775 6 deg
Experiment 0.768 0.204 0.20 deg 1.43 0.760 4 deg
M∞ UF bωα µ⁄ θLC h bθ⁄( )LC ω ωα⁄ φ
Fig. 12b)
Fig.12d)
Previous calculations for MP 77(from Thomas, Dowell, and Hall)
Direct E-L Scheme

O. Bendiksen UCLA
Multiple (Nested) Limit CyclesNLR 7301 Model Tested at DLR (Schewe, et al.)
-0.20
-0.10
0.00
0.10
0.20
0E+0
1E-1
2E-1
3E-1
4E-1
300 500 700 900 1100 1300Nondimensional time
Etot θ
h/b
-0.20
-0.10
0.00
0.10
0.20
0E+0
1E-1
2E-1
3E-1
4E-1
0 200 400 600 800 1000 1200 1400Nondimensional time
Etot
θ
h/b
Experiment
Euler-based simulations
-0.1
-0.05
0
0.05
0.1
-0.1 -0.05 0 0.05 0.1-0.1
-0.05
0
0.05
0.1
-0.1 -0.05 0 0.05 0.1
θ·
θh b⁄
h·
b---

O. Bendiksen UCLA
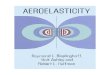
Swept Transport WingG-Wing
0
0.5
1
1.5
2
2.5
3
3.5
4
-1 -0.5 0 0.5 1 1.5 2 2.5 3x
G-Wing
Computational DomainNo. of nodes: 43,344No. of faces: 430,975No. of cells: 208,926
No. of structural plate elements: 96No of structural dof’s: 168 (linear) 280 (nonlinear)
AR 7.05=ΛLE 31.86°=
ΛTE 21.02°=
λ 0.4102=

O. Bendiksen UCLA
Subcritical BehaviorSubsonic - Nonlinear FE Code
-0.20
0.00
0.20
0.40
0.60
0.80
0.00
0.10
0.20
0.30
0.40
0 40 80 120 160 200 240
Win
g tip
dis
plac
emen
ts
Win
g to
tal e
nerg
y
Nondimensional time
Etot
wTE
wLE
-0.4
-0.2
0
0.2
0.4
-0.2 0 0.2 0.4 0.6
-0.02
0.00
0.02
0.04
0.06
0.08
0.10
0 40 80 120 160 200 240
Aero
dyna
mic
wor
k
Nondimensional time
Etot
- WA
WA
Stable decay of the G-Wing tip amplitudes at Mach 0.75 ( )ρρρρa 0.4177 kg/m3=
wTE
w· TE

O. Bendiksen UCLA
Limit Cycle Flutter OnsetG-Wing at Mach 0.84
0.10
0.20
0.30
0.40
0.00
0.04
0.08
0.12
300 350 400 450 500 550 600 650 700
Win
g tip
dis
plac
emen
ts
Win
g to
tal e
nerg
y
Nondimensional time
Etot
wTE
wLE
-0.04
-0.02
0
0.02
0.04
0.22 0.24 0.26 0.28 0.3
-0.02
0.00
0.02
0.04
0.06
300 350 400 450 500 550 600 650 700
Aer
odyn
amic
wor
k
Nondimensional time
Etot
- WA
WA
Limit cycle flutter of the G-Wing at Mach 0.84 and an air density of
, corresponding to a density altitude of about 32,800 ft (10,000 m)
ρρρρa 0.4177 kg/m3=
wTE
w· TE

O. Bendiksen UCLA
Limit Cycle Flutter of G-WingNonlinear vs. Linear Structural Code
ρa 0.4177 kg/m3=
-0.4
-0.2
0
0.2
0.4
0 0.2 0.4 0.6 0.8
-0.20
0.00
0.20
0.40
0.60
0.80
0.00
0.10
0.20
0.30
0.40
0 10 20 30 40 50 60 70 80Nondimensional time
Etot
wLEw
TE
wTE
w· TE
-0.20
0.00
0.20
0.40
0.60
0.80
0.00
0.10
0.20
0.30
0.40
0 10 20 30 40 50 60 70 80Nondimensional time
Etot
wLEwTE
-0.4
-0.2
0
0.2
0.4
0 0.2 0.4 0.6 0.8
ρa 1.141 kg/m3=
wTE
w· TE
Linear
Nonlinear

Nested LCOs of Different AmplitudesLow Transonic Mach Numbers
-0.2
0
0.2
0.4
Win
g tip
TE
vel
ocity
-0.2
0
0.2
0.4
-0.2
0
0.2
0.4
OOB-UCLA
a) Mach 0.84 b) Mach 0.85 c) Mach 0.865
Note: All LCOs are stable (density altitude = 10 km (32,800 ft).
-0.40 0.2 0.4 0.6 0.8
Wing tip TE displacement
-0.40 0.2 0.4 0.6 0.8
Wint tip TE displacement
-0.40 0.2 0.4 0.6 0.8
Wing tip TE displacement

Nested LCOs - ContinuedIntermediate to High Transonic Mach Numbers
-0.2
0
0.2
0.4
-0.2
0
0.2
0.4
-0.2
0
0.2
0.4
OOB-UCLA
a) Mach 0.88 b) Mach 0.90 c) Mach 0.96
Note: All LCOs except the inner LCO at Mach 0.88 are weakly unstable. Density altitude = 10 km (32,800 ft).
-0.40 0.2 0.4 0.6 0.8
Wing tip TE displacement
-0.40 0.2 0.4 0.6 0.8
Wing tip TE displacement
-0.40 0.2 0.4 0.6 0.8
Wing tip TE displacement

Rapid Transition of LCO BehaviorEvaporation of LCOs at Mach 0.97
-0.2
0
0.2
0.4
Win
g tip
TE
velo
city
-0.2
0
0.2
0.4
-0.05
0
0.05
0.1
OOB-UCLA
a) Mach 0.965 b) Mach 0.97 (large i.c.) c) Mach 0.97 (small i.c)
Note: At Mach 0.965 both LCOs are stable. At Mach 0.97, the LCOs “evaporate.” Density altitude = 10 km (32,800 ft).
-0.40 0.2 0.4 0.6 0.8
Wing tip TE displacement
-0.40 0.2 0.4 0.6 0.8
Wing tip TE displacement
-0.10.2 0.25 0.3 0.35 0.4
Wing tip TE displacement

Stabilization of Unstable (Secular) LCOMach 0.95
0 5
-0.25
0
0.25
0.5
Win
g tip
TE
velo
city
0 2
-0.1
0
0.1
0.2
OOB-UCLA
Stabilization of an unstable LCO at Mach 0.95 by increasing the air density from 0.4177kg/m3 to 0.60 kg/m3, corresponding to an increase in the dynamic pressure of 43.6%, ora decrease in the density altitude from 10 km (32,800 ft) to about 6.86 km (22,500 ft)
-0.5-0.25 0 0.25 0.5 0.75
Wing tip TE displacement
-0.20.2 0.3 0.4 0.5 0.6
Wing tip TE displacement

High-Altitude FlutterA Real Possibility?
OOB-UCLA
Limit cycle flutter amplitude vs. altitude at a constant Mach number(inner LCO, reached through small perturbations from steadyequilibrium state)

High-Altitude FlutterMach 0.865
OOB-UCLA
Phase plots of limit cycle flutter at high altitudes

LCO Nesting PossibilitiesMultiple LCOs
Other configurations are also possible
OOB-UCLA
Multiple limit cycle flutter branches of G-Wing in transonic region
0
0.1
0.2
0.3
0.4
0.5
0.75 0.8 0.85 0.9 0.95 1
LCO
am
plitu
de
Mach number
10 LCO cycles (inner)
20 LCO cycles (inner)
10 LCO cycles (outer)
20 LCO cycles (outer)
50 LCO cycles (outer)
Inner LCO
Outer LCO

O. Bendiksen UCLA
ConclusionsTheoretical
1. Transonic flutter should not be considered “classical” bending-torsion flutter, because flutter near the transonic dip is often triggered by nonlinear interactions between modes (not coalescence flutter)
2. Near the transonic dip, no meaningful uniformly valid linearization of the aeroelastic problem is possible
3. The transonic dip is primarily associated with the occurrence of highly nonlinear lift and moment curve slopes (almost singular behavior). The part-chord shocks on the wing surface play a fundamental role
4. Certain nonlinear transonic flutter instabilities near the transonic dip cannot be described using the classical Hopf theory
5. The breakdown occurs because the unsteady aerodynamic forces cannot be lin-earized without introducing nonuniformities in time or space, even in the limit of infinitesimal amplitudes (singular problem)

O. Bendiksen UCLA
ConclusionsComputational
6. The fluid-structure coupling problem remains of central importance in the devel-opment of accurate and reliable flutter codes
7. Both spatial compatibility and time synchronization requirements must be met, to assure that the time-marching simulations exhibit the correct aeroelastic stability behavior
8. Codes capable of predicting correct transonic LCO amplitudes must satisfy strict energy balance requirements at the fluid-structure boundary
9. In the strongly nonlinear transonic region near the dip, time-invariance is lost and it may be necessary to calculate several dozen flutter cycles before the correct stability behavior can be assessed
10.The verification and validation steps of transonic aeroelastic codes present sev-eral practical problems that have not been adequately addressed in the research literature