Embed Size (px)
Citation preview

Some governments and official institutions have a great interest on developing vessel classification based on SAR imageryfor carrying on police and surveillance activities in a global scale. Nowadays this research area is in the primary stage of itsdevelopment. In contrast with what happens with vessel detection, there is not an algorithm able to provide reasonable resultsfor the currently available SAR sensors. By now, the most profitable work has been done for fully-polarimetric SAR (POLSAR)data. In this field, Coherent Target Decompositions (CTD) [1], [2] are used to express the complex polarimetric response in acoherent combination of elemental mechanisms related to well-defined geometrical shapes. The degree of significance of thesesimple behaviors for the overall image allows to build a polarimetric map that provides guidelines of the observed geometry.Due to the fact the basic shapes can be normally found within most of the vessel structures, the output map could be used asa classification pattern. CTD work directly with the scattering matrix S, which is a first order polarimetric descriptor suitablefor analyzing complex targets. Different decompositions have been developed according to the selected basis. The simplestone is the Pauli theorem that identifies three main mechanisms so-calledeven number of reflections,odd number of reflectionsandanti-symmetric.
But, CTD have an inherent limitation. The coherent nature of such decompositions forces to consider the same center ofphase for all the possible scatters within a resolution cell. Such feature limits the practical usage of CTD for the particular casesthe image has an important mechanism within each pixel or a set of them behaving almost as the elements of the decompositionbasis. With the resolution available in current systems, both conditions are not fulfilled and the polarimetric map becomesuseless. Certainly, it could experiment noticeable changes for slight variations of the observation conditions losing the correctgeometrical information. Besides this drawback, there are other remarkable deficiencies. First, CTD provides a qualitative 2Dview of the observed tri-dimensional structure instead of providing a quantitative measurement, which complicates enormouslythe definition of a classification decision rule. Second, they are not able to deal with the vessels’ motion history inducedby ocean waves [3]. The important image distortions caused mainly by rotational motions, which could distort the length,reflectivity properties and polarimetric behavior of vessels, is a drawback they can not overcome [4].
With such limitations CTD and extensively any other approach working with single-polarimetric data are not suitable forbasing an operative algorithm and, thus, other solutions must be explored. The next logical step in classification researchis besides trying to develop systems with higher resolution preferably with fully-polarimetric capabilities, exploring theimprovements that can be obtained by adding other information channels to the available data. In this field, single-passPolarimetric SAR interferometry (POLInSAR) seems an efficient alternative as combines the benefits of polarimetry with adirect measurement of the detected geometry. In this sense, the paper presents a novel approach, so-called Pauli-POLInSAR,that combines a Pauli analysis with typical height retrieving techniques. Basically, it derives interferograms for each Paulichannel and builds a tri-dimensional map gathering the main scattering mechanisms isolated for each Pauli element.
This method is based on scattering studies that show the main scattering mechanisms of vessels would behave similarly tothe elements of the Pauli basis. A brief summary of this work can be found in Section II. It has been done with simulated
TRI-DIMENSIONAL VESSEL CLASSIFICATION PATTERNS INFERRED VIA SINGLE-PASS POLARIMETRIC SAR
INTERFEROMETRY
Gerard Margarit(1), Jordi J. Mallorqui(1) and Xavier Fabregas(1)
(1) Universitat Politcnica de Catalunya (Technical University of Catalonia), Dept. of Signal Theory and Communications
D3-Campus Nord, Cn Jordi Girona 1-3,E-08034,Barcelona, SPAIN Telephone: +34 93 401 74 26 Fax: +34 93 401 72 32 E-mail: [email protected]
ABSTRACT This paper presents a vessel classification approach for SAR imagery that combines polarimetry and interferometry. By analyzing the measured data with the Pauli theorem and deriving interferograms for each channel, accurate tri-dimensional representations of ships’ geometry are provided. The correlation of this output with a pattern database built via scattering studies allows to base a trustworthy classification decision rule. First tests performed with simulated images show this method could allow the proper vessel identification even for notable sea states. Actually, ocean waves is one of the main important limitations in current approaches, which are not able to overcome the azimuth distortions present in SAR images due to the motion history of ships. This paper will present and comment the results derived for simulated datasets that are obtained from the UPC’s Orbital SAR Simulator, GRECOSAR, for a sensor inspired in the incoming TerraSAR-X. These images will state the current approach would imply an important improvement for vessel classification.
I. INTRODUCTION
__________________________________________________ Proceedings of SEASAR 2006, 23-26 January 2006, Frascati, Italy, (ESA SP-613, April 2006)

(a) (b)
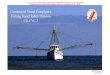
Fig. 1. SAR and ISAR (light grey) acquisition geometry of GRECOSAR (a) and its interferometric configuration (b).
Inverse SAR (ISAR) images [2] obtained from the Orbital SAR Simulator of complex targets,GRECOSAR, developed atUPC [5]. The details of the Pauli-POLInSAR method are presented in SectionIII taking special attention on the theoreticalbackground and the improvements that may provide. SectionIV shows and comments the most important results obtainedfrom simulated POLInSAR datasets using alsoGRECOSAR. The analysis of different bearings, sea states and vessel modelsshows the tri-dimensional output map matches reasonably the geometry of ships allowing a correct vessel identification fora reasonably wide solid angle. Even the SAR image distortions caused by the vessel motions and the sea-ship interactioninduced by the sea surface does not notably worsen the classification decision. These tests show the method provides betterperformances than CTD for current system resolutions, but reliable results are obtained for sensor configurations close to theincoming Tandem TerraSAR-X system.
II. V ESSEL SCATTERING STUDY
As commented previously, there is not a reliable ship classification method for SAR imagery. For developing a new approach,it seems mandatory to study the scattering properties of vessels for knowing what kind of information must be isolated in SARimages to allow ship identification. The UPC has made some works in this field by using mainly simulated Polarimetric ISAR(POLISAR) images obtained fromGRECOSAR. Several data with centimetric resolutions has been generated for differentmodels and observation conditions and analyzed via CTD. A summary of the most important results are presented here.
A. Description of the simulation environment
GRECOSAR[5] is a numerical tool able to generate POLSAR, POLInSAR and POLISAR data of complex targets withnotable accuracy, high scenario flexibility and reduced computational loads. The kernel ofGRECOSARis the electromagneticsolver GRECOTM developed at UPC [6] that predicts the RCS scattered by tri-dimensional target models via high-frequencymethods, such as Physical Optics (PO) and the Physical Theory of Diffraction (PTD). GRECOTM needs that target modelsshall be generated from blueprints with parametric or facet-based surfaces by using specific file formats. It deals among otherswith the International Graphic Exchange Specification (IGES) v.5.1 or AutoCADTM .dxf files. The format of a CAD softwarepackage developed at UPC GiDTM [7] is also admitted and it will be used for the models presented in this paper.
Fig. 1 shows in light grey the ISAR geometry used by the simulator. It consists on a kind of circular spotlight mode forwhich the sensor is moving on a circular path for a given incidence angle and angular aperture∆Ω. This parameter is measuredrespect the point with the highest height C for those positions over the sea level. Along the circular motion, the sensor pointsalways to the circumference focus where the target is located. From the simulation point of view, this configuration has twomain advantages: first, there are not so much hardware constraints for reaching centimetric resolutions, in contrast with whathappens with SAR imagery; and second, for a given SAR simulation and a∆Ω narrow enough the ISAR sensor positionscan be defined very close to the SAR platform path. Both issues allow scattering maps of complex targets providing thesame scattering information than that observed in SAR simulations, but with a notably higher resolution. This is an importantcapability for GRECOSAR’s POLISAR images, which become a powerful tool for vessel classification and, in general, SARimage interpretation. As observed later, besides their usefulness for scattering works, these images can be used for buildingthe classification patterns of the proposed algorithm.
B. Data analysis
Fig. 2 shows some examples of the scattering maps derived from simulated POLISAR datasets. They have been obtainedfor an incidence of 20 degrees, a system bandwidth of 1 GHz,∆Ω = 5o and different vessel bearings reaching a resolutionof centimeters. These images present the significance of each Pauli mechanism coded in RGB format (red→ even number of

(a)
(b)
Fig. 2. Some examples of simulated POLISAR datasets analyzed with the Pauli theorem (red→ even number of reflections, green→ odd number ofreflections and blue→ anti-symmetric) (a) for the SPA, ICE and FER models (b).
reflections, green→ odd number of reflections and blue→ anti-symmetric) with a line-of-sight facing perpendicularly to theincidence plane. An artistic view of the processed models is illustrated in Fig.2(b). The SPA and ICE models are examplesof fishing vessels. The former corresponds to a Spanish ship 27 meters length and 10 meters width whereas the later to anIceland ship with a length and width of 70 and 12 meters respectively. The FER model is a passenger ship 100 meters lengthand 12 meters width. All the models have been built with the GiD program by using around of 300,000 and 400,000 triangularfacets.
From the analysis of these data and other datasets, two important results are found. First, the main scattering mechanismsbehave similarly as trihedrals and dihedrals. The degree of similarity can be considered quite high as the usage of otherCTD isolates also the same polarimetric behaviors. And second, the particular scatter distribution found in each vessel isnot perturbed for all the views. Such conclusions points out the possibility to develop a classification approach based on thescattering properties of vessels. It seems feasibly to assume that the SAR signatures of each type of vessel would be dominatedby a specific distribution of polarimetric mechanisms that can be identified by the Pauli theorem. This means it is possible toisolate their phase contributions opening the doors of single-pass interferometry for height retrieving. The result could be anaccurate 3-D representation of the observed geometry. Next sections will evaluate this strategy by means of a new approachbased on combine the Pauli theorem with typical height retrieving.
III. T HE PAULI -POLINSAR METHOD
The scheme of the proposed vessel classification technique is shown in Fig.3. In the first step, A, the Pauli theorem isapplied to both master and slave polarimetric datasets in order to isolate the three mechanisms of the Pauli basis. For thei-thpixel with the mono-static scattering matrix
Smi =
[(Shh)m
i (Shv)mi
(Shv)mi (Svv)m
i
](1)
this process results on the following Pauli vectorkmi
kmi =
1√2
[(Shh + Svv)m
i (Shh − Svv)mi (2Shv)m
i
]T(2)
wherem stands for master (m=M) or slave (m=S) image and[. . .]T denotes transpose operation.The second step, B, applies the proper coregistration techniques for building the interferograms of each channel. As the
algorithm works directly with the scattering matrix, which is a first order polarimetric descriptor, the coregistration will not bebased on the coherence as usual, but on the image magnitude. This process gives to thei-th pixel three interferometric values

(a) (b)
Fig. 3. Scheme of the proposed Pauli-POLInSAR ship classification technique (a) and the available classification patterns (b).
I1sti = k1st,M
i (k1st,Si )∗
I2ndi = k2nd,M
i (k2nd,Si )∗
I3rdi = k3rd,M
i (k3rd,Si )∗
(3)
where k1st,mi , k2nd,m
i , k3rd,mi refers to the first, second and third Pauli mechanisms for them image and(. . .)∗ denotes
complex conjugate. From the previous interferograms, three height imagesH1st, H2nd,H3rd are derived.The local maximums of these images highlight the most important scattering centers of the vessel SAR response. Their
tri-dimensional location jointly with their Pauli polarimetric mechanism are isolated in the step C to build a global height map.The algorithm correlates this map with a predefined pattern database (step D) to provide a classification decision (step E). Themodel which pattern has the highest similarity respect the measured height distribution identifies the observed ship.
The height resolution of the global height map could be higher than a pixel. Certainly, it is possible to find different heightvalues within the same resolution cell if this cell has diverse scatters behaving each one with a particular Pauli mechanism.Even in the case the mechanisms of these scatters were not perfectly equal to the Pauli ones the height of these scatters wouldbe retrieved with a reasonable accuracy. Note this feature is not valid for those scatters sharing the same mechanism, in suchsituation the height of their phase center is retrieved instead.
A. Classification patterns
The classification patterns used in the step E provides the height, location and Pauli mechanism of a set of referencepoints within vessels’ structure that havea priori the highest significance in the SAR response. They are derived in the stepD by analyzing large datasets of simulated POLISAR images for each type of vessel taken into account by the algorithm.These images allow to predict the height map provided by the Pauli-POLInSAR method for a particular range of views. Thatdistribution of scattering centers common in all the predicted height maps becomes then the classification pattern for thatvessel. This process has been done for the SPA and ICE models deriving on the classification patterns shown in Fig.3(b).These images highlight in blue the parts of both vessels used as reference points printing in orange the corresponding height.Both are valid for a vessel bearing range around 90 degrees(275o ≤ δ ≤ 355o) and an incidence angle range around 20degrees(15o ≤ φ ≤ 35o).
B. The similarity parameter
In the final step E of the algorithm, the measured height map is compared with all the patterns of the database (by now,only two) and a similarity valuee is provided for each one. In each correlation, the algorithm fixes from the vessel responsethat particular combination of scattering centers (measured locations) that better matches the distribution of reference pointsof each pattern (theoretic locations).
The parametere is expressed in[%] and computed as the inverse of the mean value of three different errors. They standbasically for the euclidean distances between the three coordinates of the measured locations respect the theoretic ones. Suchdistances are expressed respect the cell dimensions and a pre-defined height value that fixes the minimum height differenceamong all the reference points of the model.
IV. A NALYSIS OF SIMULATED POLINSAR DATASETS
The Pauli-POLInSAR has been tested withGRECOSAR. The simulated scenario is schematized in Fig.1(a). Besides theincidence angleϕ, sensor attitude and target bearingδ, the simulator can also deal with the cruising speed, and the rotational

TABLE I
THE X-BAND SENSOR USED IN THE SIMULATIONS PRESENTED INSECTION IV
∆ωg [km] 7 h [Km] 514 ϕ [o] 20 La, Lr [m] 4.3, 0.89 - -
f [GHz] 9.65 PRF [Hz] 3630 BW [MHz] 135 FS [MHz] 150 τ [µs] 25
TABLE II
THE ENVIRONMENTAL CONDITIONS FOR THE SIMULATIONS PRESENTED INSECTION IV
Simulation label δ [o] δpitch [rad/s] δroll [rad/s] sea surface Simulation label δ [o] δpitch [rad/s] δroll [rad/s] sea surface
Sim. 1 / 8 / 15 295 0 / -1.52 / 0 0 / -0.26 / 0 N / N / Y Sim. 5 /12 / 19 335 0 / -0.98 / 0 0 / -1.16 / 0 N / N / Y
Sim. 2 / 9 / 16 305 0 / -1.43 / 0 0 / -0.52 / 0 N / N / Y Sim. 6 /13 / 20 345 0 / -0.76 / 0 0 / -1.32 / 0 N / N / Y
Sim. 3 /10 / 17 315 0 / -1.32 / 0 0 / -0.76 / 0 N / N / Y Sim. 7 /14 / 21 355 0 / -0.52 / 0 0 / -1.43 / 0 N / N / Y
Sim. 4 /11 / 18 325 0 / -1.16 / 0 0 / -0.98 / 0 N / N / Y - - - - -
(a)
(b)
Fig. 4. Similarity history plots for the SPA and ICE simulations (a). The interferograms of simulations 1 and 8 for the SPA case (b).
and translational motions experimented by the vessel due to ocean waves. A simple wave model, which considers waves assinusoids, is used to derive the angular velocities from the user-defined sea state.
The interferometric configuration ofGRECOSARis the across-track geometry shown at Fig.1(b) with the ping-pongmeasurement mode.B⊥ is the effective baseline, which is half the real baseline. A value of 30 meters is selected thandrives to a real baseline of 60 meters. TableI summarizes the important parameters of the hypothetic X-band sensor used. It isa stripmap orbital single-pass POLInSAR system based on the TerraSAR-X configuration, but with a resolution of 2.3 metersin azimuth and 1.3 in range. The mid-slant range isr = 544293 m.
A. Analysis for the SPA model
This section compiles some datasets performed for the SPA model. Three different situations have been analyzed for differentbearings. The first one corresponds to a calm sea state without a sea surface, i.e. the vessel is a floating body in the free space.

The second one considers a particular rotational motion configuration without a sea surface. And finally the third situationis like the first one, but with a sea surface of limited dimensions surrounding the target. The sea is simulated as a planarsurface with a reflection coefficient that depends among others on the operative frequency and the wave height. Despite of thesimplicity of the model, it is valid for evaluating the sea-ship interaction. TableII summarizes all environmental conditions.
The result of these simulations are presented in Fig.4(a) by means of a plot labeledSPA simulationsthat provides thesimilarity history retrieved for the two patterns. The solid line with circled markers indicates the similarity history for the SPApattern whereas the dotted line for the ICE pattern. As observed, the SPA ship is properly identified in all cases even when theocean waves induce notable azimuth distortions. These distortions can be observed in Fig.4(b) where the Pauli interferogramsand the height map for simulations 1 and 8 are attached. In the height map, red triangles, green squares and blue cross showthe tri-dimensional location of the local maximums present in the interferogram for the1st, 2nd and3rd Pauli channel.
Note also the classification decision is not notably worsened for the particular case the vessel is oriented almost parallel tothe satellite path. In such situations, the high significance of the dihedral mechanisms performed by the cabin and the deckcould become an important source of error. But the algorithm is robust also in these cases identifying properly the vessel.
B. Analysis for the ICE model
The same good behavior of the algorithm is observed in the simulations performed for the ICE model (the TableII alsoapplies). Observing the similarity history attached in Fig.4(a) (the solid line shows the similarity values for the ICE pattern)it follows the ICE ship is identified in almost all the cases, but with lower confidence. The reason lies on reduced geometricalinformation available of the real vessel that drives to a so much simple ICE model. This causes a mismatching on the scatteringmaps that avoids to find a number of reference points high enough for the derived pattern. But this lack of scattering informationis not a drawback for properly identifying the vessel. Besides the trustworthiness this result gives to the method, it also showsthe algorithm could be able to work with short vessels that normally would have a pattern with two or three scattering centers.
V. CONCLUSION
In this paper, a new approach for vessel classification that generates interferograms for each Pauli channel to provide accuratetri-dimensional representations of ships’ geometry has been presented. It is based on scattering studies performed with simulatedPOLISAR images that show the most significant scattering mechanisms of vessel SAR signatures would behave as the elementsof the Pauli basis. The analysis of simulated POLInSAR datasets obtained from the UPC’s SAR simulatorGRECOSARhasbeen used to prove the great potentialities of this method for basing a reliable algorithm. In all cases, the simulated ship hasbeen properly identified even when the ocean waves induce notable azimuth distortions in the SAR response. This means animportant advantage for the presented method as all the approaches previously developed for both single- and fully-polarimetricSAR data are not able to deal with the vessel motion history.
These results make encouraging to perform further research with this new approach. More complex situations with othertypes of vessel and/or new sea surface models must be processed in order to increase the trustworthiness of the results andexplore the limits of the proposed method. On the other hand, the analysis of fully-polarimetric real data with reliable ground-truth would be essential to give more trustworthiness to the main hypothesis of the approach. Additionally, it will be interestingto list which structures could be easily isolated and the minimum macro- and/or micro-scale differences that the various typesof ships of the pattern database should have for achieving a good discrimination in a reasonable range of views. This workmust be done keeping in mind vessel modeling needs the maximum accuracy to derive patterns with the required confidence.
ACKNOWLEDGMENT
The authors would like to thank the shipyard ”Astillero Armon” for providing the blueprints of the vessel and the GiDTM
supporting team for the free licenses. This work was supported by the Spanish MCYT and EU FEDER funds under projectsTIC2002-04451-C02-01 and TEC2005-06863-C02-01, the European Commission in the scope of IMPAST project (Q5RS-2001-02266) and the Spanish MECD grant AP2002-2313.
REFERENCES
[1] R. Touzi, R. K. Raney and F. Charbonneau,On the Use of Permanent Symmetric Scatterers for Ship Characterization, Transactions on Geoscience andRemote Sensing: Vol. 42, No 10, pp: 2039–2045, October 2004.
[2] G. Margarit, X. Fabregas, J. J. Mallorqui and T. Borquetas,Analysis of the limitations of coherent polarimetric decompositions on vessel classificationusing simulated images, Proceedings of Geoscience and Remote Sensing Symposium: Vol. 4, pp: 2483–2486,September 2004.
[3] K. Ouchi, M. Ichara, K. Morimura, S. Kumano, I. Takami,Non uniform azimuth image shift observed in the Radarsat images of ships in motion,Proceedings of IEEE Transactions on Geoscience and Remote sensing: Vol. 40, No 10, October 2002, pp. 21882195.
[4] G. Margarit, X. Fabregas and J. J. Mallorqui,Study of the vessel speed and sea swell effects on simulated polarimetric high resolution SAR images,Proceedings of European SAR Symposium, EUSAR: Vol. 2, pp: 603–606, May 2004.
[5] G. Margarit, P. Blanco, J. Sanz, J. J. Mallorqui,Orbital SAR simulator of fishing vessel polarimetric signatures based on high frequency electromagneticcalculations, Proceedings of Geoscience and Remote Sensing Symposium: Vol. 7, pp: 4459-4461, July 2003.
[6] J. M. Rius et al.,GRECO: Graphical electromagnetic computing for RCS prediction in real time, IEEE Antennas and Propagation Magazine, Vol. 35,No. 2, April 1993, pp. 7-17.
[7] GiD support database, International Center for Numerical Methods in Engineering (CIMNE), Barcelona. Available:http://gid.cimne.upc.es/