Embed Size (px)
Citation preview

TUNING STRUCTURALLY CONSTRAINED STABILIZERS FOR LARGE POWERSYSTEMS VIA NONSMOOTH MULTI-DIRECTIONAL SEARCH
Paulo C. Pellanda∗, Pierre Apkarian†, Nelson Martins‡
∗IME - Instituto Militar de Engenharia - Electrical Engineering Dept.Praca General Tiburcio, 80, Praia Vermelha
22290-270 - Rio de Janeiro, RJ, Brazil†ONERA - Control Dept. and Paul Sabatier University - Maths. Dept.
2, Avenue Edouard Belin31055 - Toulouse, France
‡CEPEL - Centro de Pesquisas de Energia EletricaAvenida Hum s/n - Cidade Universitaria, PO 68007
20001-970 - Rio de Janeiro, RJ, Brazil
Emails: [email protected], [email protected], [email protected]
Abstract— This paper proposes the use of a recently available algorithm combining multi-directional searchtechniques with nonsmooth optimization methods to design structurally constrained controllers for large powersystems. The main aim is to provide stability with guaranty of a feasible user-defined minimum damping ratio forthe closed-loop dynamics. The multivariable Brazilian North-South interconnected power system model, whichhas more than 16 hundred open-loop states, is used to test the proposed methodology. Three decentralizedlead-lag power system stabilizers are simultaneously tuned considering time performance specifications, which isdifficult to reach through available conventional control techniques.
Resumo— Este artigo propoe o uso de um algoritmo recentemente disponıvel que combina tecnicas de buscamulti-direcional com metodos de otimizacao nao-suave no projeto de controladores com restricoes estruturaispara sistemas de potencia de grande porte. O objetivo principal e estabilizar o sistema com a garantia de umfator de amortecimento mınimo viavel, predefinido pelo projetista, para a dinamica de malha fechada. O modelodo sistema de potencia interconectado norte-sul brasileiro, que possui mais de 1600 estados em malha aberta,e utilizado para testar a metodologia proposta. Tres controladores descentralizados do tipo atraso-avanco saosimultaneamente ajustados considerando especificacoes de desempenho no domınio do tempo, o que e uma tarefadifıcil utilizando-se as tecnicas de controle convencionais existentes.
Key Words— Nonsmooth Optimization, NP -Hard Design Problems, Pattern Search Algorithm, Moving Poly-tope, Power System Stabilizers, Multivariable Systems, Small-Signal Stability, Large Scale Systems, StructurallyConstrained Controllers, Fixed-Order Synthesis, Simultaneous Stabilization.
1 Introduction
In (Apkarian and Noll, 2006), the authors describean algorithm combining Multi-Directional Search(MDS) (Torczon, 1991; Torczon, 1997) with nons-mooth techniques to solve several difficult synthe-sis problems in automatic control. More specif-ically, they show how to combine Direct Search(DS) techniques with nonsmooth descent steps inorder to ensure convergence in the presence of non-smoothness. Typical nonsmooth criteria appear-ing in control problems include the spectral ab-scissa, the maximum eigenvalue function and theH∞-norm. The proposed algorithm, here namedMDSN, is intended to solve several nonconvexand even NP -hard problems, for which LMI tech-niques or algebraic Ricatti equations are imprac-tical. Hence, the algorithm can be applied to con-strained and unconstrained optimal control prob-lems, including static and fixed-order output feed-back controller design, simultaneous stabilizationand mixed H2/H∞ synthesis. As the approachavoids using Lyapunov variables, it is suitably ap-plied in the synthesis of small and medium size
controllers for plants with large state dimension,constituting an alternative to LMI- or BMI-basednonlinear programming algorithms.
This paper presents the first large-scale ap-plication results of the MDSN algorithm, explor-ing the design of multiple fixed-parameter sta-bilizers in interconnected power system models.The problem of obtaining decentralized lead-lagcontrollers that provide good damping enhance-ment to interarea oscillation modes of large powersystems is a typical nonconvex control problemsolved in practice through conventional (small-signal) analysis/design techniques (Yang and Fe-liach, 1994; Martins et al., 1999). However, theefficiency and effectiveness of this procedure isstrongly dependent on the designer experience andcan lead to a great amount of trial-and-error be-fore obtaining satisfactory specifications in termsof time-domain properties. The MDSN algorithmprovides a systematic framework to solve thisproblem and is used here to compute structurallyconstrained Power Systems Stabilizers (PSS) bymaximizing the minimum closed-loop damping ra-tio.

The MDSN algorithm is briefly described inSection 2. Section 3 presents the test system usedto verify the effectiveness of this method in solv-ing large-scale problems. In section 4, numericalresults are discussed. Section 5 concludes.
2 The MDSN algorithm
This section contains a brief description of theMDSN algorithm. For an in-depth discussion ofMDS in the smooth case the interested reader isreferred to (Torczon, 1991).
The MDS algorithm requires a ‘seed’ or basepoint v0 and an initial simplex S in Rn with ver-tices v0, v1, . . . , vn. The vertices are then rela-beled so that v0 becomes the best vertex, that is,f(v0) ≤ f(vi) for i = 1, . . . , n, where f(·) : Rn →R is a C1 function to be minimized. The initialS is chosen from one of the three different shapesshown in Figure 1. The scaled simplex is usedwhen prior knowledge on the problem scaling isavailable, but right-angled and regular simplicesare generally preferred in the absence of informa-tion.
The algorithm updates the current simplex Sinto a new simplex S+ by performing two types oflinear transformations and driving the search to-wards a point having a lower function value (bet-ter point): reflection and expansion/contraction(Figure 2). First vertices v1, . . . , vn are re-flected through the current best vertex v0 to giver1, . . . , rn. If a reflected vertex ri gives a bet-ter function value than v0, the algorithm tries anexpansion step. This is done by increasing thedistance between v0 and ri for i = 1, . . . , n andyields new expansion vertices ei for i = 1, . . . , n.The current simplex S is then replaced by eitherS+ = {v0, r1, . . . , rn} or S+ = {v0, e1, . . . , en},depending on whether the best point was amongthe reflection or expansion vertices. If neither re-flection nor expansion provide a point better thanv0, a contraction step is performed. This is doneby decreasing the distances from v0 to v1, . . . , vn.If a point better than v0 is found among the con-traction vertices c1, . . . , cn, the simplex S is re-placed by S+ = {v0, c1, . . . , cn}. To complete oneiteration (or sweep) of the algorithm, v+
0 is takento be the best vertex of S+.
Figure 1: Selection of initial simplex
Note that the MDS algorithm is guaranteedto converge to a local minimum for smooth func-
tion but may fail at a point of nonsmoothness forgeneral nondifferentiable functions. In our testswe have observed that it is beneficial in such asituation to switch between the geometries (regu-lar, right-angled) in order to give MDS some ad-ditional help to move on. But all these considera-tions are clearly heuristic, depend on the contextand will need further testing.
We sum up the above discussion in the follow-ing pseudo-code.
MDS with nonsmooth steps (MDSN)
1. Select initial simplex S = {v0, . . . , vn},where v0 is the best vertex. Fix anexpansion factor µ ∈ (1,∞) and acontraction factor θ ∈ (0, 1), and anintervention tolerance ω > 0.
2. Stop if the relative size of S is belowthreshold ε
3. Perform a reflection stepri = v0 − (vi − v0). Compute f(ri).
4. If improvement f(ri) < f(v0)perform expansion stepei = (1− µ)v0 + ri. Compute f(ei).If improvement f(ei) < f(v0)
put S+ = {v0, e1 . . . , en}.Goto step 5.
elseput S+ = {v0, r1 . . . , rn}.Goto step 5.
elseperform contraction stepci = (1 + θ)v0 − θri. Compute f(ci).Put S+ = {c0, . . . , cn}.
5. Compare best vertex in S+ to f(w). If wis better, replace S+ by new simplexcontaining w as a vertex. Otherwiseaccept S+. Go back to step 2 to loop on.
The adopted stopping criterion is based on therelative size of the current simplex:
1max(1, ‖v0‖) max
1≤i≤n‖vi − v0‖ < ε , (1)
where v0 is the current best vertex of S ={v0, . . . , vn} and ε > 0 is a specified tolerance.
The choice of the initial simplex S is a rel-atively unexplored topic. The convergence proofin (Torczon, 1991) only requires that S be non-degenerate, which means that the n + 1 points{v0, v1, . . . , vn} defining the simplex must spanRn. Otherwise MDS would only search over thesubspace spanned by the degenerate simplex.

Figure 2: Reflection, expansion and contraction ofcurrent simplex
3 Test system
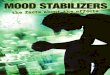
The large system model utilized to test the MDSNalgorithm is the Brazilian Interconnected PowerSystem (BIPS) (Martins et al., 1999; Gomes Jr.et al., 2003). The North-Northeast and South-Southeast subsystems were interconnected in 1999through a 1,000 km long, series-compensated 500kV transmission line (Figure 5). Thyristor Con-trolled Series Compensators (TCSC) were placedat the two ends of this line and equipped withPower Oscillation Damping (POD) controllers inorder to damp the North-South (NS) mode, alow-frequency, poorly damped interarea oscilla-tion mode associated with this interconnection.
The BIPS model for the year 1999 has about60 GW of generating capacity, 2,370 buses, 3,401lines/transformers, 2,519 voltage dependent loads,123 synchronous machines, 122 excitation sys-tems, 46 PSS, 99 speed-governors, 4 static Varcompensators, 2 TCSCs equipped with POD con-trollers, 1 HVDC link with two bipoles. Each syn-chronous machine and associated controls is theaggregate model of a whole power plant. All sys-tem equipment relevant to the study were mod-eled in detail, yielding a system Jacobian matrixwith 13,165 rows/columns and 48,532 nonzero el-ements (Gomes Jr. et al., 2003). The system has1,676 state variables and more than 11,500 alge-braic variables. The pattern of nonzero elementsof this large descriptor system matrix is picturedin Figure 3.
QR routines from standard mathematical li-braries (Patel et al., 1994; Mathworks, 1984-2005),have performed quite reliably for power systemstate matrices of about 2,000 states, consideringpractical controller parameters and operating con-ditions. The CPU time for the QR eigensolutionof the 1,676-state Brazilian system matrix is about50 seconds on a Pentium personal computer (CPU1.86 GHz - Intel Centrino).
0 2000 4000 6000 8000 10000 12000
0
2000
4000
6000
8000
10000
12000
Figure 3: Sparse structure of BIPS matrix
Figure 4 pictures the multivariable feedbackcontrol system focusing on the decentralized PSSloops of three major plants located at the North-east Brazilian region. The system outputs are themachine rotor speeds (ωi(t), i = 1, 2, 3) at thesame power plants. The output of the PSS con-trollers are supplementary control signals to beapplied to the machine voltage regulator termi-nals (vref
i (t)). For the application of MDSN al-gorithm, these three PSSs are considered discon-nected together with the POD controllers of theBIPS model, yielding an open-loop system modelwith 1,637 states.
Figure 4: Multivariable feedback control systemincluding PSSs at three Northeast power plants
Figure 6 shows the full eigensolution of theopen-loop BIPS model. It is seen that the NSmode becomes unstable (0.1089± 1.2052j) in theabsence of the three PSSs depicted in Figure 4 andthe two POD controllers. The objective is to sta-bilize the NS mode only through improved designsof these three PSSs, so that the POD controllerswould not be needed in the small signal stabilitycontext.

Figure 5: Brazilian North-South interconnected power system - geographical location
−5 −4 −3 −2 −1 0−15
−10
−5
0
5
10
15
0.0538
0.0538
Real Axis
Imag
inar
y A
xis
ζ =
ζ =
NS mode
Figure 6: QR eigensolution for the open-loopBIPS model (1,637 states)
Adequate interarea oscillation damping isachieved in practice by combining classical fre-quency response techniques with efficient meth-ods for small signal stability analysis. Most of theavailable methods are based on the use of a de-scriptor state form, exploiting the Jacobian ma-trix sparsity (See Figure 3), and rely on iterativesteps to obtain the dominant eigenstructure (oneor a set of eigenvalues and associated eigenvectorsat a time). In spite of the fact that some of thesemethods allow dealing with multivariable systemsin the analysis step, the design is normally per-formed by tuning one stabilizer loop at a time,which may require a number of redesigns.
In the next section, we show that the design ofmultivariable structurally constrained controllersfor large systems can be performed in a more di-rect way while considering time domain specifica-tions.
4 Results
This sections presents numerical results from theapplication of MDSN algorithm (Section 2) to de-sign the three decentralized PSSs in Figure 4.
The control synthesis objective is to maximizethe closed-loop damping ratio (ζ) by tuning thecontroller parameters, i.e., the gains Ki and thetime constants T1i, T2i, T3i, T4i, i = 1, 2, 3, whatis equivalent to minimize the function
f(A(K)) = max{
cos(α) : α , tan−1
(Imλ
Reλ
)}
where λ ∈ spec(A(K)), A is the closed-loop dy-namic matrix and K is the vector of controller

parameters.initial simplex: right-angled simplexinitial edge length: 5expansion factor µ = 2contraction factor θ = 0.5stop criterion ε = 1e− 5Initial controller parameters (Seed 1): ran-
dom ∈ [0,30]For stabilization: 1 iteration (cpu time about
30 min)max ζ: cpu time 23h42min
Table 1: MDSN algorithm iterations (seed 1)
Iteration Simplex transformations ζ1 − -0.1052 1 expansion -0.0793 2 contractions -0.0764 1 expansion -0.0735 1 reflection -0.0526 3 contractions -0.0527 1 expansion -0.0448 1 expansion -0.0279 2 contractions -0.02210 1 expansion -0.01811 1 expansion -0.01012 1 reflection -0.00313 1 expansion 0.00514 2 contractions 0.01015 1 contraction 0.01016 1 expansion 0.01217 1 expansion 0.01618 1 reflection 0.01919 1 expansion 0.03520 1 reflection 0.04221 1 reflection 0.04922 1 contraction 0.04923 1 expansion 0.054
−5 −4 −3 −2 −1 0−15
−10
−5
0
5
10
15
0.054
0.054
Real Axis
Imag
inar
y A
xis
ζ =ζ =
ζ =
NS mode
Figure 7: QR eigensolution for the closed-loopBIPS model (1,646 states)
−0.6 −0.5 −0.4 −0.3 −0.2 −0.1 0 0.1−1
0
1
2
3
4
5
6
7
80.0538
Real Axis
Imag
inar
y A
xis
Open loopIterationsClosed loop
ζ =uncontrollable
mode
NS mode
Figure 8: Effectiveness of the MDSN algorithm inincreasing the NS mode damping ratio
Initial controller parameters (Seed 2): ran-dom ∈ [0,1]
cpu time 3h13min
Table 2: MDSN algorithm iterations (seed 2)
Iteration Simplex transformations ζ1 − -0.0322 1 contraction, 1 reflection -0.0293 1 expansion 0.054
Final controller parameters:
K1 K2 K3
T11 T12 T13
T21 T22 T23
T31 T32 T33
T41 T42 T43
=
7.9186 0.8381 0.50280.8462 0.0196 0.70955.5252 0.6813 0.42890.2026 0.3795 0.30460.6721 0.8318 0.1897
5 Conclusions
difficult step: full QR eigensolution
References
Apkarian, P. and Noll, D. (2006). ControllerDesign via Nonsmooth Multi-DirectionalSearch, SIAM J. on Control and Optimiza-tion 44(6): 1923–1949.
Gomes Jr., S., Martins, N. and Portela, C. M. J.(2003). Computing Small-Signal StabilityBoundaries for Large-Scale Power Systems,IEEE Trans. Power Syst. 18: 747–752.
Martins, N., Barbosa, A. A., Ferraz, J. C. R.,Santos, M. G., Bergamo, A. L. B., Yung,C. S., Oliveira, V. R. and Macedo, N. J. P.(1999). Retuning Stabilizers for the North-South Brazilian Interconection, IEEE Power

Engineering Society Summer Meeting, Al-berta, pp. 58–67.
Mathworks (1984-2005). MATLAB Mathematics- Version 7, Mathworks, Inc.
Patel, R. V., Laub, A. J. and Van Dooren, P. M.(1994). Numerical Linear Algebra Techniquesfor Systems and Control, IEEE Press, NewYork, NY.
Torczon, V. (1991). On the Convergence of theMultidirectional Search Algorithm, SIAM J.on Control and Optimization 1(1): 123–145.
Torczon, V. (1997). On the Convergence of Pat-tern Search Algorithms, SIAM J. on Controland Optimization 7(1): 1–25.
Yang, X. and Feliach, A. (1994). Stabilization ofInter-Area Oscillation Modes Through Ex-citation Systems, IEEE Trans. Power Syst.9(1): 494–500.