Embed Size (px)
Citation preview

Two-stroke engine modelling and simulationK ilie* B ChengStudent of School of Aerospace, Mechanical and Manufacturing Engineering, RMIT University, Melbourne, VIC, Australia
Abstract: The paper presents two stroke engines with current associated modifications and optimizations that have been applied in UAV applications. The research is based on a selected set of an opposed piston two cylinder two-stroke engine and UAV which has been analysed through theoretical and experimental data in order to generate the two-stroke engine base model, and use FE method to analyse and make possible improvement on selected engine . The results of efficient matching of two-stroke engine and UAV have been presented by the comparison of required power and thrust force of UAV and engine provided power. The aims of the project are to generate a model of that engine and identify the parameters of an opposed piston two-stroke engine that ensure the engine provides the power required for propulsing a model aircraft. A low cost opposed piston two cylinder two-stroke engine with integrated working solutions will be modelled, simulated and evaluated in order to obtain feasible improvements which are based on the base model through proper computational software such as, CATIA and ANSYS, etc.
Keywords: Two-stroke engine, opposed piston engine, unmammed aerial vehicle, computational modelling, computational simulations.
INTRODUCTION
Two-stroke engines have been widely used in small and light applications, such as, motorcycles, chainsaws, snow mobiles and UAVs. The natural geometrical parameters and operational cycle make them a very promising power produce device compared with four-stroke engine. In order to model and simulate the performance of two-stroke engine, an UAV based two-stroke engine has been selected to be the target for modelling and simulations. The following sections will present the general two-stroke engine operations and mainly focus on the scavenging methods, then, selected engine and associated engine parameters will be calculated and compared with typical four-stroke engine and improved selected two-stroke engine itself. Engine modelling and kinematic simulations which are done by CATIA will be included with corresponding FEA analysis on connect rod through different materials. Kinematic analyses of the engine are also presented in order to state the engine propulsion performance in one certain UAV selection.
*Corresponding author: Faculty of School of Aerospace, Mechanical and Manufacturing Engineering, RMIT University, Melbourne, VIC, AustraliaEmail: [email protected]
CHARACTERISTICS OF GENERAL TWO-STROKE ENGINE
The performances of two-stroke engine are basically controlled by the scavenging methods and valve and port controls. Other parameters such as compression ratio, fuel/air ratio and thermal efficiency are directly affected by those two critical designs. Scavenging methods of two-stroke engine are mainly described as loop scavenging, cross scavenging and uniflow scavenging.
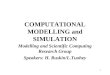
Fig 1 Loop scavenging method of two-stroke engine.
The objective of loop scavenging which is shown in figure 1 is to produce a scavenging process in a ported cylinder with two or more scavenging ports directed towards that side of the cylinder away

from the exhaust port, but across a piston with a flat top [1].The advantage of loop scavenging is to eliminate the hot-running characteristics of the piston crown and provides a rapid and efficient combustion process with a flat piston head design [2].
Fig 2 Cross scavenging method of two-stroke engine.
Cross scavenging method which is shown in figure 2 has a noticed design signature which is the deflector piston. It has a good scavenging characteristic at low throttle openings which gives considerable power output at low speed [3]. But, the scavenging efficiency and fuel economy is reduced due to the combination of a non-compact combustion chamber filled with an exposed protuberant deflector [4]. Due to the orientation of exhaust port and scavenge port, the manufacturing cost of cross scavenging method is relatively lower than equivalent loop or uniflow scavenging method, [5].
Fig 3 Uniflow scavenging method of two-stroke engine.
Uniflow scavenging which is shown in figure 3 has been considered as the most efficient scavenging method of two-stroke engine. The basic scheme is
to fill the cylinder with fresh charge at one end and remove the exhaust gas from the other end [6]. This scavenging method with swirling motion provides excellent combustion efficiency in low speed, low stroke, and big capacity diesel engine. But for spark-ignition engines, mechanical complexity overcomes the advantages of it compared with simple scavenging method such as, cross and loop scavenging.
Gas exchange process of two-stroke engine is controlled by valves and ports. For general two-stroke engine, poppet valves, disc valves and reed valves are used. Poppet valves are generally not installed in two-stroke engine due to the conflict of providing a sufficient fresh charge into cylinder with a fast operation cycle, and the complex design with relatively simple cylinder geometry. Disc valves are designed to provide high specific output for racing engines [7]. Disc valves are usually fabricated from spring steel or made from composite materials. A Reed valve which is shown in figure 4 provides an effective automatic valve whose timings vary with both engine load and engine speed [8]. They are self-actuating via different pressure. Most of reed valves are designed as V-blocks and the reed petals are made of either spring steel or fibre-reinforced composite materials [9].
Fig 4 Reed valve for two-stroke engine and its working state.
SCAVENGING METHOD AND VALVE DESIGN OF SELECTED ENGINE
Selected engine is called DLE-60 Twin cylinder engine which is shown in figure 5. Loop scavenging method and reed valve are used due to the suitability for various applications. Both pistons of selected engine are flat head deigned and it has two scavenge ports and one exhaust port only for each cylinder. The reed valve has been selected due to the self-actuating behaviour via different pressure during different RPM. Figures 6 shows the scavenging method of selected engine and figure 7

shows the reed valve has been used in the selected engine.
Fig 5 Selected DLE-60 Twin cylinder two-stroke engine.
Fig 6 Inside view of cylinder of DLE-60.
Fig 7 Reed valve of DLE-60.
DESIGN DESCRIPTION
Selected engine has two cylinders with opposed piston layout, so, the central gravity and engine vibration are lower than other engine configurations. In order to test the selected engine has sufficient power output to make the UAV up in the air, Computational aided programs and analytical calculations are taken step by step. Table 1 and 2 show the selected UAV and engine geometrical parameters respectively.
Table 1 Selected UAV parameters.
Configurations ValuesWing span (in) 96Wing area (sq. in) 1625Fuselage length (rudder to cowling) (in) 80Fuselage length (rudder to spinner) (in) 85Weight (lbs.) 20-21Wing loading (oz. /sq. ft.) 31.2 Table 2 Geometrical parameters of the selected two-stroke engine.
Engine configurations ValuesBore (mm) 36Stroke (mm) 30Number of volume (cm3) 2Engine weight (Kg) 1.56Static thrust at 100 meters altitude 15.2Static thrust at 1800 meters altitude 13.5Power (Kw) 4.05@8500
rpm
Objectives
Demonstrate the selected engine has sufficient power to support selected UAV, and consider the engine performance respect to different engine materials.
Task specifications
Identify the thermodynamic terms of selected engine.
Identify the required lift force and engine thrust which can take UAV airborne.
Model the selected engine in CATIA. Run DMU kinematic through CATIA. Run FEA analysis for connect rod and
crankshaft and engine running state. Calculate kinematic analysis for piston.

THERMODYNAMIC TERMS WITH ASSOCIATED ENGINE PARAMETERS
Swept volume
Swept volume is volume that piston travels from TDC to BDC. In this case, the swept volume for this engine is the cylinder number multiple by the swept volume. Equation (1) states the swept volume of two cylinders engine which B is bore and L is stroke.
V d=2 ×( π4
× B2 × L)
(1)
V d=¿61072.6 mm3
Clearance volume
Clearance volume is the volume of the cylinder when the piston is at TDC. In this case, the clearance volume is multiply by 2 for corresponding engine configuration. Equation (2) presents the clearance volume of this engine.
V c=2 ×(π × r2× d ) (2)
V c=¿9253.42 mm3
Compression ratio
Compression ratio is the ratio of maximum volume in any chamber of an engine to the minimum volume in that chamber. The higher value means greater crankcase pumping action. Equation (3) shows the compression ratio of selected engine.
rc=V d+V c
V c(3)
rc=61072.6+9253.42
9253.42=7.6
Angular velocity
The angular velocity of this engine is taken at 8500 rpm. Equation (4) shows the angular velocity of selected engine.
ω=2 π ×rpm60
(4)
ω=890.12 rad /s
Rotational speed
Equation (5) states the rotational speed of the engine at 8500 rpm.
n=rpm60
=850060
=141.67 rps
(5)
Mean piston speed
Equation (6) presents the mean piston speed of the engine at 8500 rpm.
PṠ=2∗l∗n (6)
PṠ=2 ×30 ×141.67=8.5 m /s
Instantaneous piston speed
The instantaneous piston speed of the engine at 8300 rpm is stated in equation (7). The angle of piston position is 45o.
Pi
PṠ=π
2× sinθ×(1+ cosθ
√( ca )
2
−sin2θ ) (7)
Pi=¿11 m/s
Maximum torque at maximum RPM
Equation (8) shows the engine maximum output torque at maximum rpm
T= powerangular velocity
(8)
T= 4.05890.12 =4.55Nm
Brake power
The engine produced power is equal to the power absorbed by the brake. Equation (9) shows the brake power at 8300 rpm.
Pe=T × w=4050.046 Watts (9)
Power to weight ratio

Power to weight ratio is an essential parameter that can be used as scale to determine the engine performance of two-stroke engine. Equation (10) shows the power to weight ratio of the selected engine.
mg=mm
Pe= 1.56
4.05=0.39 kg/kw
(10)
Generated energy by the fuel
The selected engine is using regular unleaded gasoline as support fuel. The higher heating valve for gasoline is 47,300 kj/kg; the specific gravity for gasoline is 739 kg/m3, and tank of DLE-60 is about 1000 cc. equation (11) shows the generated energy by fuel under perfect condition.
E=HHV × SG ×VOLUME (11)E=34954.7 KJ Brake mean effective pressure
Brake power output and the brake mean effective pressure is the residue of the indicated power output and the indicated mean effective pressure, after the engine as lost power to internal friction and air pumping effects. BMEP is corresponding with measured power output. Equation (13) shows the BMEP valve of selected engine.
BMEP= brake powerswept volume×rotaional speed
(13)
BMEP= 4050.0460.0000610726× 141.67
=468.105
Kpa
Fuel/Air ratio
Fuel/air ratio which is shown in equation (14) is assumed to be in perfect fuel and under stoichiometric condition. The chemical equation for the complete combustion is sated below:
2 C8 H 18+25O2+(25 × 7921 )N 2=16 C O2+18 H O2+(25× 79
21)N 2
(14)
F/A ratio=16 ×12+36× 1
25× 32+25 ×79×28/21=0.066
Conrod/crank ratio
Conrod/crank ratio is a dimensionless factor that could be used to affect the engine performance. Smaller the crank/conrod ratio, the smoother will be the accelearion function. In general engine design, conrod/crank ratio is sitting between three and five to have acceptable transmission angles in a short engine.
Crank/conrod ratio:
rl= 15.25
56.768=0.27
Conrod/crank ratio:
lr=56.768
15.25=3.72
Bore/stroke ratio
Bore/stroke ratio is another trade-off design criteria that could influence engine performance. A large bore small stroke engien will result in high gas forces, and a large stroke and small bore will result in high inertia force. For this engine, the bore/stroke ratio is under one which is a typical undersquare engine. An undersquare engine with long stroke has better compression ratio and thermal efficiency compared to same displacment engine with short stroke. But, it will easily get weared.
BS=30
36 =0.83
REQUIRED LIFT FORCE FOR UAV
Lift force is essential parameter to analyse the engine perfornace. Lift forces are calculated at 2 altitude which are 100 m and 1800 m, and compared with gieven data in order to make alternative configurations.
Total airbourne weight
UAV (include properller)+engine+fuel is
mu+me+mf=9.53+1.56+0.72=11.81 Kg
Density of air at different levels
According to I.C.A.O. Standard Atmosphere Table,At 100 m, d=0.971 Kg/m3,At 1800 m, d=0.8359 Kg/m3.At 0 m, d=1 Kg/m3.
Wing area

S=1.0484 m2
Angle of attack
Assume the angle of attack is 16o during take-off, and remain its required lift force during fly, then , the Cl is 1.41, 0.42 and 0.3 respectively.
Velocity
V=13 m/s, 23.4 m/s and 29.81 m/s for cursing and tank-off. Velocity is ranged from 0 to 100 m/s.
Lift force
Lift forces for different altitude are done by excel for various velocities. Minimum life force which is shown in table 3 must equal to the maximum weight of UAV including all installation. The required minimum force is equal to the total weight of UAV in force scale which is 115.85 N. Equation (15) has been used to calculate the minimum life force during different altitudes.
l=(12)× d × v2 × s×c l
(15)
5 15 25 35 45 55 65 75 85 950
1000
2000
3000
4000
5000
6000
7000
8000
Min lift force at take-offMin lift force at 100 mMin lift force at 1800 m
velocity
Lift fore
Fig. 8 Minimum lift force during take-off and airborne.
Table 3 Minimum lift force for take-off, 100m cursing and 1800 m curing with associated velocity.
Lift force at take-off
Lift force at 100 m
Lift force at 1800 m
Velocity (m/s) 13 23.4 29.81
Minimum lift force
(N)124.91 117.06 116.81
ENGINE THRUST
Thrust force which is stated in equation (16) is the force which moves an aircraft through the air. In this case, thrust is generated by two-stroke twin opposed engine and used to power the selected UAV. Thrust force is 149.112 N and 132.435 N at 100 m and 1800 m according to the engine manufacturer. The propeller is 2 blades with 685.8
mm in diameter and 254 mm pitch diameter. The trust equation is stated as equation (16):
T=( 12 )× p × AP × ∆ V ×(2 V +∆ V )
(16)
Since, air densities are obtained from I.C.A.O. Standard Atmosphere Table, the thrust force can be calculated from equation and listed in table 4. The thrust forces are greater than the indicated thrust forces which are provided from manufacturer even the velocity of wind has same direction repsect to the existing air which is produced by propeller. The required thrust force of UAV is samller to the provided engine thrust force. The provided engine thrust was calculated at static condition which is vo
is zero. Even the incoming velocity is increasing
from 0 m/s to 18.5 m/s the selected engien can still provide sufficient power.

Table 4 Thrust force for different vo at three different altitude.
Velocity Different altitude Thrust force (N)
vo=0 m/s 0 m 141.85100 m 137.731800 m 118.57
vo= 10 m/s 0 m 148.98100 m 144.671800 m 124.54
vo=18.5m/s
0 m 148.17100 m 143.871800 m 123.85
Theoretical propeller efficiency Equation (17) shows the theoretical propeller efficiency which is calculated at zero free stream velocity.
θp , ideal=2V∆V
(17)
θp , ideal=1
Total propeller efficiency
Where the non-ideal efficiency ranges from 85-95% based on comparisons with blade element models. A nominal value of 90% can be used. Total propeller efficiency in equation (18) indicates the total propeller efficiency is about 0.9.
θp=θp ,ideal × θp , nonideal=1∗0.9=0.9 (18)
Propeller efficiency
Equation (19) shows the shaft power which is calculated at static thrust force level which is v=0 m/s.
Pshaft ,∝¿=
T3/ 2
√2 ρ × A P× 1
θp ,nonideal¿ (19)
Pshaft ,∝¿=1826.18watts ¿
Thrust coefficients
Equation (20) presents the coefficient of thrust, where n is the propeller rotational velocity, d is diameter of propeller and p is density of air.
CT=T
ρ × N 2 × D4
(20)
CT=¿ 0.032
Power coefficients
Equation (21) states the power coefficient of propeller associated with certain rotational velocity.
CP=Pshaft ,∝¿
ρ × n3× D5 ¿
(21)
CP=¿ 0.005064
Advance ratio
Advanced ratio is the first step to identify which the thrust is generated. Equation (22) states the value of advanced ratio at maximum rotational velocity.
J= VN × D
(22)
J=0.20
Requested power for a given propeller
Figure 9 shows the requested shaft power is less to available engine power, and then the propulsion system can operate at that thrust level as shown above in figure 8, the incoming wind velocity should be at least 18.5 m/s which is almost level 8 Beaufort in order to support the UAV flying in 1800m. p
shaft ,∝¿ ( j)=cp ( j)× ρ ×( vj )
3
×d 2¿ (23)
pshaft ,∝¿ ( j)=¿¿ 1318.47 watts
RPM to advance ratio
Equation (24) presents the required rpm for the propeller at minimum required power level.
Rpm=60× vj × d
=8311
(24)

0 5 10 15 20 25 30 350
200400600800
100012001400 1318.46595653
333
Required power for propeller
velocity
required power
Fig 9 The selected engine can provide sufficient power, thrust and lift force to the UAV.
KINEMATIC ANALYSIS
Opposed piston engine can be considered as a special vee engine with vee angle of 180o. This configuration can enhance the vibration reduction through the cancellation of inertial forces. Those kinematic analyses are evaluated at a rotational speed of 8500 rpm.
Piston position respect to crankshaft angle
Eqaution (25) shows the piston position vary different crankshaft angle, where r is crank radius and l is connecting rod length. Figure 10 shows the piston position in left cylinder at 0o degree crankshaft angle, the piston reachs the maximum position and returns back with increased crank angle. At 180o degree crank angle, the piston is at BDC and will going up to TDC at 360o crank angle in order to complete a operating cycle.
x=l− r2
4 l+r (cosωt+ r
4 lcos 2ωt )
(25)
0 90 180 270 3600
0.01
0.02
0.03
0.04
0.05
0.06
0.07
0.08
Piston Position
Fig 10 Piston position with associated crank angle.
Piston velocity respect to crankshaft angle
Equation (26) presents the piston velocity respect to different crankshaft angle, by differentiating from piston displacement. Figure 11 and 12 presents the velocity and acceleration respectively. At 0o, 180o and 360o crank angle, the piston velocity is zero due to the instantaneous unmoveable position at TDC and BDC which is shown in figure 10, but, the acceleration still exists due to the piston movement at next second.
˙x=−rω (sinωt+ r2l
sin 2ωt )
(26)
0 90 180 270 360
-15.000
-10.000
-5.000
0.000
5.000
10.000
15.000
Piston Velocity (m/s)
Fig 11 Piston velocity with associated crank angle.
Piston acceleration respect to crankshaft angle
Take differentiate again from equation (26), the acceleration equation (27) can be obtained.

x=−r ω2(cosωt+ rl
cos 2ωt ) (27)
0 90 180 270 360
-12000-10000
-8000-6000-4000-2000
02000400060008000
Piston Acceleration (m/s2)
Fig 12 Piston acceleration with associated crank angle.
Equivalent masses, inertia and shaking forces
For shaking force analysis, the crank is assumed to be in pure rotation and piston is in pure translation. Equation (28) and (29) show the shaking forces which is the sum of the inertia force in x-axis and y-axis. Figure 13 and 14 show the shaking force in x- and y- direction. The zero acceleration near 90o
and 270o crank angle, the shaking force has zero value in the same crank angle due to the shaking force direction is same as acceleration.
0 90 180 270 360
-1000
-500
0
500
1000
1500
Shaking Force X (N)
Fig 13 Shaking force in X-direction with associated crank angle.
F ix=−ma (−r ω2 cosωt )−mb ¿ (28)
f iy=−ma(−r ω2 sinωt ) (29)
0 90 180 270 360
-500-400-300-200-100
0100200300400500
Shaking Force Y (N)
Fig 14 Shaking force in Y-direction with associated crank angle.
The traction of piston movement is same as shaking force magnitude which is shown in figure 15.
-1000 -500 0 500 1000 1500
-500-400-300-200-100
0100200300400500
Shaking Force Magnitude (N)
Fig 15 Shaking force magnitude.
MODELLING
DMU kinematic
DMU is the process of building and using a computer-based digital 3D representation of a product to conduct tests will predict product function and performance in the real world [10]. Since, it is a virtual mock-up, the requirements for physical prototypes in real life are reduced. The

oscillating cylinder engine is illustrated in the DMU kinematic. DMU kinematic requires a fully developed assembly model in order to carry the simulations. The joints need to be careful selected and “angle driven” or “length driven” is determined by the movement of simulated parts. For the simulation of the piston movement, one command is enough associated with a fixed part. The required constraints and joints of engine are stated and listed in table 5.
Table 5 Constraints and joints for DMU kinematics.
Jointed parts Joint typesPiston and cylinder Cylindrical
Engine block (cylinder) FixedPiston and piston pin Rigid
Piston and connect rod RevoluteConnect rod and
crankshaft Revolute
Crankshaft and shaft Cylindrical
Part design and assembly design
CATIA part design is used to model the required engine components according to precise geometrical shape and dimensions. Assembly design is taken place after part design with correct constraints, each part was labelled in different colour and engine block is given certain levels of transparency in order to observe the internal parts, such as, piston, connect rod and crankshaft. Figure 16 shows the assembly design of the selected engine before DMU kinematic. Figure 17 presents the explode layout of the engine, each part has been labelled in different colours in 3D view. Figure 18 show the assembly model of piston (piston pin, piston bearing), crankshaft and connect rod. The angle of connect rod and crankshaft is not specified with the install cylinder. Labelled CATIA parts and quantities have been listed in table 6 for clarification.
Fig 16 Isometric view of finished assembly engine model.
Fig 17 Detailed explode assembly engine model.
Fig 18 Piston, connect rod and crank assembly model.

Table 6 Engine layout and coloured engine parts.
Noted colour Engine parts QuantitiesEngine block
(cylinder) 2
Piston 2Connect rod 2
Piston bearing 2Piston pin 2Crankshaft 1
Shaft 1Engine block
(top) 1
Engine block (base) 1
Fig 19 Scavenging method of the cylinder.
Fig 20 reed valve and piston installation positions.
FEA ANALYSIS
Based on the calculated and given data of the engine, the directional deformation, equivalent strain and normal stress for the connecting rod and crankshaft has been analysed through ANSYS. For connecting rod analyses, the cylindrical supports and rotational velocity are used in order to simulate the motions of it during engine operation. Cylindrical supports, bearing loadings and rotational velocity are selected to be the analysis setting of crankshaft. The following table shows the values of three solutions with associated regions. The maximum deformation of connecting rod is occurring at the middle of connecting rod, for crankshaft the maximum directional deformation happens at the joint section of connecting rod and crankshaft which is show in figure 24. Those simulations can approximately indicate the working state of these two parts under perfect condition which means same firing frequency, precisely manufactured parts, perfect loading conditions, etc. but, in real engine running case, for such small engine like this without advanced sensors, the perfect condition cannot be achieved easily.
Table 7 FEA values for different crankshaft (steel) variations.
Directional deformation (mm)
Equivalent elastic strain (mm/mm)
Normal stress (mpa)
Z axis 9.4803e-004 22.438 Max-9.0866e-004 -12.122 Min
X axis 4.6372e-004 8.0363 Max-3.3219e-004 -10.247 Min
Y axis 1.5896e-004 10.566 Max-1.5923e-004 -16.058 Min
All bodies 1.126e-004 Max9.1634e-011 Min

Table 8 FEA values for different connecting rod (steel) variations.
Directional deformation (mm)
Equivalent elastic strain (mm/mm)
Normal stress (mpa)
Z axis 3.7042e-006 0.11238 Max-3.6617e-006 -0.18464 Min
X axis 5.7954e-007 0.10425 Max-6.0555e-007 -0.10736 Min
Y axis 8.921e-006 0.28904 Max-4.216e-007 -0.41404 Min
All bodies 2.2281e-006 Max1.2863e-011 Min
Fig 21 Directional deformation of connect rod in y-axis.
During compression, both connect rods pull the crankshaft in opposite direction and create maximum normal stress at the instantaneous connect regions of connect rod ring and crankshaft, and deform the shape of crankshaft from cylindrical into ellipse shape. The deformation of crankshaft cause two relatively small normal stress in x-axis and y-axis, hence, the ductility of the materials is critical at high temperature operation.
The max directional deformation of connect rod happens at the middle of connect rod. The cross-section area and thickness of middle part is reduced, but, the maximum normal stress happens at the joint section of middle part and connecting rod ring part. Since, the ring parts have reduced cross section area which cause the slotted regions have maximum equivalent elastic strain during engine rotation. Figure 21, 22 and 23 show directional deformation, equivalent elastic strain and normal stress the connecting rod which is made of steel. Figure 24, 26 and 26 show the crankshaft which is made of steel with corresponding solution values. These two parts are both done through fine
mesh with edge and face sizing. By comparing table 7 and 8, the maximum values of crankshaft in working direction is large than connecting rod due to high inertia force and bigger mass. The normal stress of connecting rod is very small compared with crankshaft which means during engine running, most of stress is acting on the crankshaft which reduces the stress acting on the connecting rod.
Fig 22 Equivalent elastic strain of connect rod in y-axis.

Fig 23 Normal stress of connect rod in y-axis.
Fig 24 Directional deformation of crankshaft in z-axis.
Fig 25 Equivalent elastic strain of crankshaft in z-axis.
Fig 26 Normal stress of crankshaft in z-axis.
ENGINE PERFORMANCE FOR DIFFERENT MATERIALS
Previous calculations indicate the selected engine is a suitable power producing device to provide enough power to the UAV. In order to improve the performance, different materials are used to improve the performances of the engine. First, aluminium and titanium rods are used to replace common steel rods. Piston head is replaced by aluminium due to high thermal conductivity. According to the given engine data, shaking force of the alternative materials can be determined. The shaking force in X-direction is reduced from 1234 N to 415 N, and shaking force from Y-direction is reduced from 510 N to 163 N. following figures 27, 28 and 29 show the change in shaking force.
0 90 180 270 360
-400
-300
-200
-100
0
100
200
300
400
500
shaking force X (N)
Fig 27 Improvement shaking force associated with different crank angle in x-direction.

0 90 180 270 360
-200
-150
-100
-50
0
50
100
150
200
shaking force Y (N)
Fig 28 Improvement shaking force associated with different crank angle in y-direction.
The reason aluminium is used to replace steel in such applications mainly due to the mass reduction. Aluminium offers almost 45% weight reduction and provides same level strength as steel does. Weight reduction no only reduce the weight of engine, it’s also reduce the rotating mass and make engine rotating faster under same intake condition. Weight reduction also reduces the stress and vibration level which acting on the cylinder surface, connect rod bearing and piston pin. So, those parts will have less wearing and last longer than steel under same lubricating condition.
-1000 -500 0 500 1000
-200
-150
-100
-50
0
50
100
150
200
shaking force mag-nitude (N)
Fig 29 Improvement shaking force magnitude associated with different crank angle.
Table 9 states that for such crankshaft which is made of steel and AI alloy has less deformation and ESS, but, the normal stress is increasing, so, the crankshaft will have relatively high stress component at each section even the weight is
reduced, it will have better performance compare with single material crankshaft. Same behaviour happens in connecting rod section, the deformation and ESS both decreasing. Table 9 FEA values for different crankshaft materials at z-axis for maximum values.
Steel AI alloy Steel & AI alloy
Directional deformatio
n (mm)
9.4803e-004
5.5218e-004
3.3405e-004
Equivalent elastic strain
(mm/mm)
1.126e-004
6.4224e-005
4.1097e-005
Normal stress (mpa)
22.438 23.245 28.203
Table 10 FEA values for different connect rod materials at z-axis for maximum values.
Steel AI alloyDirectional deformation
(mm)8.921e-006 8.7838e-006
Equivalent elastic strain (mm/mm)
2.2281e-006 2.1806e-006
Normal stress (mpa) 0.28904 9.959e-002
CONCLUSION
Through calculations and simulations, the selected engine is suitable for selected UAV. The velocity for that UAV is ranged from 0 m/s to 29.81 m/s, and altitude is from 0 m to 1800 m. since, the calculation is done by the based model of the engine, after running simulations on ANSYS, the performance of the engine can be improved by reduce the engine weight, use high octane fuel and select maximum performance propeller. REFERENCE
1. G.P. Blair, the basic design of two-stroke engines, Society of Automotive Engineers, Warrendale, PA, 1990.
2. G.P. Blair, the basic design of two-stroke engines, Society of Automotive Engineers, Warrendale, PA, 1990.
3. G.P. Blair, the basic design of two-stroke engines, Society of Automotive Engineers, Warrendale, PA, 1990.

4. G.P. Blair, the basic design of two-stroke engines, Society of Automotive Engineers, Warrendale, PA, 1990.
5. G.P. Blair, the basic design of two-stroke engines, Society of Automotive Engineers, Warrendale, PA, 1990.
6. G.P. Blair, the basic design of two-stroke engines, Society of Automotive Engineers, Warrendale, PA, 1990.
7. G.P. Blair, the basic design of two-stroke engines, Society of Automotive Engineers, Warrendale, PA, 1990.
8. G.P. Blair, the basic design of two-stroke engines, Society of Automotive Engineers, Warrendale, PA, 1990.
9. G.P. Blair, the basic design of two-stroke engines, Society of Automotive Engineers, Warrendale, PA, 1990.
10. R.L. Norton, Design of machinery: an introduction to the synthesis and analysis of mechanisms and machines, McGraw-Hill, Boston, 2004.
11. J. Gundlach, Designing unmanned aircraft systems: a comprehensive approach, AIAA, Reston, Va, 2012.
12. Heichal, Y, 2008, Importance of Unmanned AIR Vehicles, session 2008-01-2238, SAE International, Warrendale, PA, USA.
13. Almaguer, R, 2011, Growth Opportunity in Global UAV Market, Lucintel.
14. Laimböck, FJ, 1991, ‘The Potential of Small Loop-Scavenged Spark-Ignition Single Cylinder Two-Stroke Engines’, Two-Wheeler & Small Capacity Engine Division, SAE International, Warrendale, PA, USA.
15. Weinzierl, S, Hanula, B and Wildemann, R, 2002, THE Design and Development of a Light-Weight, High-Speed, Diesel Engine for Unmanned Aerial Vehicles, session 2002-01-0160, SAE International, Warrendale, PA, USA.
16. Regner, G, Herold, RE, Wahl, MH, Dion, E, Redon, F, Johson, D, Callahan, BJ, and McIntyre, S, 2011, THE Achates Power Opposed-Piston Two-Stroke Engine: Performance and Emissions Results in a Medium-Duty Application, session 2011-01-2221, SAE International, Warrendale, PA, USA.
17. Herold, RE, Wahl, MH, Regner, G, Lemke, JU and Foster, DE, 2011, Thermodynamic Benefits of Opposed-Piston Two-Stroke Engines, session 2011-01-2216, SAE International, Warrendale, PA, USA.
18. Laimböck, FJ, 1991, ‘The Potential of Small Loop-Scavenged Spark-Ignition Single Cylinder Two-Stroke Engines’,
Two-Wheeler & Small Capacity Engine Division, SAE International, Warrendale, PA, USA.
19. Sukhoi26mx 2007, ‘Assembling and Flying the Aeroworks 75cc Extra 260’, weblog post, 11 December 2007, pilot227, 15 June 2013, < http://www.rcuniverse.com/forum/m_6468524/anchors_6602670/mpage_4/key_/anchor/tm.htm#6602670>.
20. DLE-60 Twin Cylinder Petrol Engine, viewed 15 June 2013, < http://www.dlenginesaustralia.com/dlshop/dl-engines/dle-60-twin-cylinder-petrol-engine.html>.
21. Nuccio, P, Luongo, A, and Vignoli, M, 2006, Optimization of a Light Aircraft Spark-Ignition Engine, session 2006-01-2420, SAE International, Warrendale, PA, USA.