Embed Size (px)
Citation preview

Columbia International Publishing Journal of Modeling, Simulation, Identification, and Control (2013) Vol. 1 No. 3 pp. 89-104 doi:10.7726/jmsic.2013.1007
Research Article
______________________________________________________________________________________________________________________________ *Corresponding e-mail: [email protected] 1* Department of Mechanical Engineering & Mining Machinery Engineering, Indian School of Mines, Dhanbad – 826 004, India
89
Modelling and Simulation of a Hydrostatic Transmission System using Two Motor Summation Drive
Kabir Dasgupta 1, Sanjoy Kumar Ghoshal 1*, and Niranjan Kumar 1
Received 26 April 2013; Published online 3 August 2013 © The author(s) 2013. Published with open access at www.uscip.org
Abstract In this article simulation studies have been carried out on the dynamic performance of a hydrostatic transmission (HST) system using two motor summation drive. In this respect a closed loop HST system that consists of a variable displacement swashplate controlled axial piston pump and bent axis piston motors is considered. Bondgraph simulation technique is used to model the hydrostatic drive system. In that model an on-off control strategy is implemented to switch over the mode of operation from single motor to twin motor or vice-versa considering pressure as a parameter. The system’s performance has been analysed with respect to typical load cycle of a machine where such drive is incorporated. The effects of variation of critical parameters of the system on the performance of the system are studied through simulation. Keywords: Hydrostatic (HST) drive; Hydraulic motor; Bondgraph modeling; Dynamic response; Bent axis piston motors; Variable displacement swashplate pump
1. Introduction Hydrostatic drive is an essential part of modern off-road vehicle. Extremely high power density, teamed up with the advantages of a continuously variable transmission, maximum torque available at low engine speed and quick reversing, make the hydrostatic drive an indispensable item for the machine designers when creating highly efficient mobile equipment. Reduction in fuel supply consumption and harmful emissions is one of the challenges for the off-the road vehicles. Several drive train concepts have been developed to utilize energy efficiently. However, there is a scope to improve the efficiency and productivity of a mobile machine by using hydraulic components in a creative manner, combined with the components from alternative drive systems. An HST drive converts mechanical energy of the input drive shaft of a pump to pressure energy in a nearly incompressible working fluid and then reconverts it into mechanical energy at the output

K. Dasgupta, S. K. Ghoshal and N. Kumar / Journal of Modeling, Simulation, Identification, and Control (2013) Vol. 1 No. 3 pp. 89-104
90
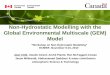
drive shaft of the motor. It is used to convert the rotating mechanical power from one source to another without the use of gears. The operating characteristics of the prime mover do not always correspond to the requirement of an off-road vehicle. A widely varying tractive effort is required at the drive end to cater for the varying load demand. In hydrostatic drive system, either by using variable displacement of pump and motor or by controlling the flow rate supplied from pump through proportional valve to the motor, the transmission characteristics are varied. Maximum speed and maximum tractive effort are usually not required to occur simultaneously in a machine. Generally it is accepted for a construction machine to slow down when output torque requirement goes up. The use of variable displacement pump and motor meets the requirement. Closed-loop hydrostatic drive system with single motor drive is currently the state of art in wheel loader machine, a typical Heavy earth Moving Machine (HEMM). Maximum performance of such drive depends on the performance of the hydrostatic components that mainly depend on various operating conditions. Whereas long term hydrostatic components development focuses on achieving small gains by improving efficiency and it is to be focused to maximize the system efficiency by creative system engineering with standard components. However, application and load cycle of a machine play a key role for choosing the best approach when designing the drive system of the vehicle. To benefit from high torque of high displacement motors, without compromising on the maximum drive speeds that have to be reduced with higher displacements, two small motors are combined together instead of using a single larger one. During hard digging and loading work by the loader, both motors develop maximum torque at their maximum displacement. For high speed and low load operation, one motor strokes to zero displacement to improve efficiencies. A schematic representation of such a drive is shown in Fig. 1.
Fig 1. Two motor summation drive system used in HEMM
With the single motor drive, with the increase in the load torque, the system pressure increases that affect the efficiencies of the hydrostatic components and the overall system. Therefore, within a limited torque-speed requirement, such drive may be effective. To get the maximum benefits from the hydrostatic components for the complete range of operation of the machine, the two-motor

K. Dasgupta, S. K. Ghoshal and N. Kumar / Journal of Modeling, Simulation, Identification, and Control (2013) Vol. 1 No. 3 pp. 89-104
91
summation drive system has been proposed. It increases the Transmission ratio of the complete drive system. Several researchers had studied the performance of hydrostatic drives consisting of various types of pumps and motors. Notably, Watton (1986) has applied the method of characteristics of the speed controlled hydraulic drive system, which is dominated by fluid inertia in long transmission lines. Chappell (1986) has developed a model of radial piston hydraulic motor for evaluation of the factors affecting the motor performance and to study the influence of various internal factors on the performance of the motor. Manring and Luecke (1998) have analysed an HST drive that consists of a variable displacement swash-plate controlled pump and a fixed displacement motor. Dasgupta (2000) has analysed the quasi-static performance of an open-loop hydrostatic drive using orbit motor, where the torque-speed performance of the motor is investigated using a displacement controlled pump. The open loop dynamic performance of a servo valve controlled axial piston motor transmission system has been studied by Dasgupta et al. (2006), where torque loss of the motor has been determined from its steady-state performance. Mandal et.al (2009) have already proposed a reduced model to study the steady-state performance of an open circuit and a closed circuit HST drives with LSHT motor. The said study investigates the effects of the critical parameters of the pumps and the motor on the steady-state performance of the HST drives. The art of model making in system dynamics is comprised of two stages. The first stage is involved in splitting the system into its very basic components, namely, compliances, inertias, dissipaters and sources. The model may be further refined by identifying more and more elements of the components in the systems. However, one has to stop at one stage either satisfied by the grasp of details for the range of operation or restricted by the limitation of the handling capacity. Putting the pieces back together is the next stage. The work presented in this paper deals with the detail modeling of an HST system using two motor summation drive. Bondgraph simulation technique 2000 has been used to model the system. With respect to the variation of critical parameters of the system and typical load cycle of an HEMM where such a drive system is incorporated, the dynamic performance of the system has been studied through system simulation.
2. The Physical System Figure 2 shows the closed circuit HST system using two motor summation drive, considered for the analysis. The closed loop system has been designed in such a way; the transmission can be operated either with a single motor or with two motor drive mode. When there is a demand of low torque and high speed on the wheels of the vehicle, the transmission will operate with a single motor; with the increase in load demand, the transmission will operate with two motor drive systems. Therefore, depending upon the load demand, the transmission will be automatically switched on to single motor from two motor drive systems or vice-versa.

K. Dasgupta, S. K. Ghoshal and N. Kumar / Journal of Modeling, Simulation, Identification, and Control (2013) Vol. 1 No. 3 pp. 89-104
92
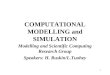
Fig 2. Closed-circuit Hydrostatic Transmission System with Two motor summation drive using
pump loading Referring to Fig. 2, a variable displacement swashplate controlled axial piston pump (item no. 2) driven by 15 kW electric motor (item no. 1) supplies pressurized fluid to the hydro-motors. By actuating the control valves (item no. 3) through PLC operated two-position controller, the flow is supplied either to both the hydro-motors (item no. 5) or to a single hydro-motor. Both the hydro-motors are connected with the load (item no. 8) through a gear unit (item no. 7) of 1:1 gear ratio. The flow is equally divided between the two motors when both of them are parallelly connected with each other. When single motor is connected with the pump circuit, the other motor is driven at the same speed through gear unit. Therefore, it acts as a pump. To prevent cavitation, it draws oil from the tank through check valve (item no. 6) and returns it to tank through low pressure relief valve (item no. 4).
3. Modelling of the System Dynamics of the HST drive system and its components are modelled using Bondgraph technique (Mukherjee and Karmakar, 2000). Such a technique is based on the power flow and it is a very useful tool for formulating the state equations of a system and its components. In the development of the dynamic model of the hydrostatic drive system: • The fluid inertia is neglected; • The mineral based hydraulic oil used is considered to be Newtonian fluid; • The resistive and the capacitive effects are lumped wherever appropriate; • The effects of pressure on the properties of the fluid are ignored;

K. Dasgupta, S. K. Ghoshal and N. Kumar / Journal of Modeling, Simulation, Identification, and Control (2013) Vol. 1 No. 3 pp. 89-104
93
• The dynamics of the gear unit and the d.c valve are not taken into consideration; • In the event of the opening the valve ports, flow forces acting on the valve spool are not considered; similar considerations are made for inlet and outlet valve ports of the motor; • The leakages other than those from the pump and the motors are ignored. Figure 3 shows the bondgraph model of the closed circuit two motor summation drive system. It is described in the following sub-sections.
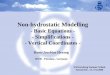
Fig 3. Bondgraph model of the Two-Motor Hydrostatic Summation Drive
The bondgraph model of the system when operates with two motors (Fig. 3A) is described below: The SF element on 1 junction represents the rotational frequency (ωp) of the variable displacement pump. Essentially, a hydrostatic unit, pump or motor, transforms hydraulic power to mechanical

K. Dasgupta, S. K. Ghoshal and N. Kumar / Journal of Modeling, Simulation, Identification, and Control (2013) Vol. 1 No. 3 pp. 89-104
94
power or vice-versa. This basic fact is represented by a transformer (TF junction). The TF modulus Dp is the volume displacement rate of the pump with respect to the shaft rotation (i.e, the
theoretical pump flow )pps DV . Similarly, the TF elements connecting 1 and 0 junctions
represent the volume displacement rate of the motor (Dm). A part of the ideal flow of the pump
escapes through its clearance as leakage. The R element on the pdP0 junction represents the leakage
resistance of the pump (Rlkgp). In the above model, the C elements on the 0 junctions take into account the flow losses at the respective plenum because of the compressibility of the fluid. The R
elements on dcv1 junctions represent the resistance (Rdcv) of the valve (item no. 3 of Fig. 2). By
switching the valves, the drive mode changes from twin motor to single motor or vice-versa. The pressure drop (high or low) across the valve ports that occurs while switching them has been taken into account by modulating the values of the resistances (Rdcv) accordingly. The R element on the
mdP0 junction indicates the leakage resistance Rlkgm of the motor. The md1 junction representing the
mechanical part of the load corresponds to the speed of the motor output shaft (ωmd). The load inertia (Jld) and the resistive load (Rld) on the motor shaft are represented by I and R elements
connected with md1 junction, respectively. The activated C element on the same junction records
the speed of the motor. The bondgraph model of the system when operates with a single motor (Fig. 3B) is given below: The model is almost similar to that discussed above. In this case one motor is connected with the load whereas the other one operates as a pump. The pump speed is same as that of the motor, as it
is driven through gear unit (item no. 7 of Fig. 2) having 1:1 gear ratio. Therefore, the ms1 junction
that denotes the speed of the motor is connected with the motor and pump plenum through TF
elements. From the pump plenum (mpsP0 ), the flow returns to tank through low pressure relief
valve. The R and SE elements connected with the dcv1 represent the valve resistances (Rlow) and the
sump pressure (Psmp), respectively. Since the resistances (Rdcv) of the valve ports are in conductive causalities, while deriving the system equations, they are considered as modulated flow sources, the flow through which depends upon the valve opening area and the pressure difference across it. However, the leakage flow of the pumps and the motors represented by their resistances (Rlkg) are considered to be laminar, that depends on the pressure difference across the leakage path. The system equations derived from the models are as follows: 3.1 Both motors parallely connected with the load (Fig. 3 A) Volume change rate of the fluid at pump plenum is given by:
dcvplkgspd VVVV 2 (1)

K. Dasgupta, S. K. Ghoshal and N. Kumar / Journal of Modeling, Simulation, Identification, and Control (2013) Vol. 1 No. 3 pp. 89-104
95
In the above equation, the first term indicates the ideal flow (= ωp Dp) supplied by the pump, the second term signifies the leakage flow (Ppd/Rlkgp) from pump plenum whereas the third term
indicates the flow
)(22
mdpd
dcvd
PPaC supplied to the motor.
Neglecting the leakage flow through valve, the volume change rate of the fluid at each motor plenum is written as:
molkgmmimd VVVV (2)
The second term of Eq. (2) indicates the flow supplied to the inlet port of the motor
)(2 mdpd
dcvd
PPaC , the third term signifies the leakage flow from motor plenum (= Pmd /
Rlkgm) and the fourth term indicates the outlet flow from the motor (= ωmd Dm). The torque load due to inertia is as given in Eq. (3):
ldmdmmdld RDPp 2 (3)
The second term in Eq. (3) indicates the total motor torque; whereas the third term gives the resistive torque on the drive shaft. The load speed:
ld
ld
mdJ
p (4)
The pump pressure:
Ppd = Kp Vpd (5) The motor pressure:
Pmd = Km Vmd (6) 3.2 Single motor is connected with the load (Fig. 3 B) The system equations derived for the single motor drive are similar to that described above. Volume change rate of the fluid at main pump plenum is:
dcvplkgsps VVVV (7)

K. Dasgupta, S. K. Ghoshal and N. Kumar / Journal of Modeling, Simulation, Identification, and Control (2013) Vol. 1 No. 3 pp. 89-104
96
In eqn. 7, the first term indicates the ideal flow (= ωp Dp) supplied by the pump, the second term signifies the leakage flow (Pps / Rlkgp) from pump plenum whereas the third term indicates the flow
)(2 msps
dcvd
PPaC supplied to the motor.
Neglecting the leakage flow through valve, the volume change rate of the fluid at each motor plenum
molkgmmims VVVV (8)
In eqn. 8, the second term indicates the flow supplied to the inlet port of the motor
)(2 1msps
dcvd
PPaC , the third term signifies the leakage flow from motor plenum (=
Pms1/Rlkgm) and the fourth term indicates the outlet flow from the motor (= ωms Dm). The volume change rate of the fluid at plenum of the motor that acts as a pump is given in Eq. (9).
mpolkgmmpimps VVVV (9)
The second term in Eq. (9) represents the pump inlet flow (= ωms Dm), the third term indicates the
leakage flow of the pump (= Pmps / Rlkgm) and the fourth term gives the outlet flow (= lkgm
smpmps
R
PP ) of
the pump that passes through low resistance path to sump considered as laminar flow. The torque load due to inertia:
mmpsldmsmpsls DPRDPp (10)
The load speed:
ld
ls
msJ
p (11)
The pump pressure:
Pps = Kp Vps (12) The motor pressure:
Pms1 = Km Vms (13) The pressure of the motor that operates as pump:

K. Dasgupta, S. K. Ghoshal and N. Kumar / Journal of Modeling, Simulation, Identification, and Control (2013) Vol. 1 No. 3 pp. 89-104
97
Pps2 = Km Vmps (14)
4. Results and Discussions The parametric studies of the dynamic performance of the system have been made, by solving all the equations derived in Sec. 3. While simulating the model, a typical load cycle shown in Fig. 4 usually encountered by HEMM is considered.
Fig 4. Variation of load resistance with the different phases of operation of the machine
The derivation of the system equations from the model and their numerical solutions are carried out using the software SYMBOLS 2000 (Mukherjee and Samantaray, 2001). This particular package runs on as self-styled multi-tasking environment through different modules. The pictorial representation of the bondgraph model of any physical system can be made and subsequently, the state equations are developed, which are solved numerically along with their graphical representation. It can also take various non-linearities of the system. By using the software, the observer state can be created additionally by activated bonds that do not change the dynamics of the system. The dynamic performance of the hydrostatic drive system is investigated at constant rotational frequency (p) of the pump. The simulation results are obtained by solving the system equations (eq. 1 through 18). The parametric values given in Table 1 are considered in simulation. Table 1 Parametric values of the system
Parameter Value Parameter Value ωp 1500 rpm Dm 16 cc/rev Dp 28 cc / rev Rlkgp 1012 N.s/m5 Kp 1012 N/m5 Rlkgm 1012 N.s/m5 Rdcv 107 N.s/m5 Jl 1 N.m / s2 Km 1012 N/m5 Pspm 105 N/m2

K. Dasgupta, S. K. Ghoshal and N. Kumar / Journal of Modeling, Simulation, Identification, and Control (2013) Vol. 1 No. 3 pp. 89-104
98
The simulation studies are made with respect to the specified load cycles shown in Fig. 4. With the variation in the load, the system pressure changes. In this study it has been considered that the differential gap set at the two-position controller (PLC) causes to actuate the valves at two limiting pressure values. With the increase in the load when the system pressure reaches 40 MPa (which is the higher limit set of the controller), the drive mode of the transmission changes from single motor to twin motor. Similarly with decrease in the load, when the system pressure reaches to 20 MPa (which is the lower limit set at the controller), the drive mode of the transmission changes from twin motor to single motor. The dynamic response of the system pressure is shown in Fig. 5. (In Fig. 5b, the time axis is zoomed in from 39 s to 85 s to show the clarity in pressure variation). With the flow supplied to the motor, the system pressure increases (0 to 40s). Due to low compressibility of the fluid, there is immediate rise in pressure, thereafter it attains a steady state value that continues till 40 s. After that due to gradual increase in load (Rld) from 40 s to 50 s, the system pressure increases. Comparing the Fig. 5 with that of Fig. 4, the trend of increase in pressure is found to be almost similar to that of the load.
(a)
(b)
Fig 5. Dynamic response of the system pressure

K. Dasgupta, S. K. Ghoshal and N. Kumar / Journal of Modeling, Simulation, Identification, and Control (2013) Vol. 1 No. 3 pp. 89-104
99
Referring to Fig. 5, as the maximum pressure attains by the system is less than 40 MPa, the transmission is operating in single motor mode; whereas the other motor is operating in pumping mode as both the hydro-motors are connected through a constant mesh gear unit of 1:1 ratio. Figure 6 shows the motor pressure working as a pump that supplies fluid at a low pressure to the sump through pressure relief valve (item no. 4 of Fig. 2).
(a)
(b)
Fig 6. The pressure of the motor that acts as pump At 47.36 s. the system pressure corresponding to R1 reaches at 40 MPa (Fig. 5b), which is the upper set limit of the two-position controller. This causes change in the drive mode of the transmission from single motor to twin motor by opening the direction control valve (item no. 3 of Fig. 2). With the opening of the valve port, there is momentary fall in pressure from 40 MPa to 25 MPa (Fig. 5b). Thereafter with the increase in the load during 47.36 to 50 s, the pressure of both the motors continues to rise upto 22 MPa (corresponding to R1) and it remains constant at the same value during constant load period. With the decrease in the load resistance during the period t3 to t4 (refer Fig. 4), the system pressure decreases and when it reaches 20 MPa that is the lower set limit of the controller, the transmission drive switches to single motor mode.

K. Dasgupta, S. K. Ghoshal and N. Kumar / Journal of Modeling, Simulation, Identification, and Control (2013) Vol. 1 No. 3 pp. 89-104
100
As the transmission system operates now in single motor mode, the pump supplies flow to a single motor and pressure increases. The rise in pressure is due to the switching of pump supply flow from two motors to single motor. During the period from t4 to 100 s, due to the constant load resistance, the system pressure also remains unchanged. However, with the rotation of the single motor, the other one operates as a pump supplies flow to sump at a low pressure shown in Fig. 6. The responses of the system are obtained at three values of the base load resistance (R1 = 0.15, R2 = 0.2, R3 = 0.25). The dynamic response of the load speed during cycle of operation is shown in Fig. 7.
(a)
(b)
Fig 7. The variation of motor speed with load as a parameter With the decrease in the load resistances (Ri, i = 1…3), the pressure and the speed responses become more oscillatory and also the settling time of the system response increases. With the increase in the value of Ri the steady-state system pressure increases and the speed decreases. The decrease in speed is due to the higher load torque that demands higher supply pressure. The leakage flow of the pump and the motors increases with the increase in the pressure.

K. Dasgupta, S. K. Ghoshal and N. Kumar / Journal of Modeling, Simulation, Identification, and Control (2013) Vol. 1 No. 3 pp. 89-104
101
4.1 Effect of Bulk Stiffness of the fluid The drive considered for the analysis is used in articulated loader, a typical underground coal mining equipment. The hydraulic fluids used in such machine need to be safer. Considering the values of the bulk modulus of different types of Fire Resistant Fluids (FRFs) used in such equipment, the simulation runs are made. Figure 8 shows the comparison of speed and pressure responses of the drive system for three different types of FRFs.
Fig 8(a). Effect of bulk stiffness of fluid on the transient response of Pressure of two motor system
Fig 8(b). Effect of bulk stiffness of fluid on the transient response of load speed of two motor system
The above results (Fig 8) indicate that with the increase in the bulk stiffness of the fluid, the peak pressure as well as the fluctuation of the fluid pressure increases. It increases the settling time of the system’s response. Here the settling time means the time taken to reach the steady-state value when it is subjected to the change in drive mode from two motor to single motor or vice-versa. Similar effects are observed for the drive speed. The comparison of the simulation results shows that the changes in systems’ response are associated with the properties of the different fluids. 4.2 Effect of Leakage Resistance of the hydro-motor The leakage resistances of the pump (Rlkgp) and the hydro-motors (Rlkgm) are considered to be laminar which is proportional to the kinematic viscosity (µ) of the fluid. The effects of variation of Rlkgm (due to three different types of fluid) on the motor speed and pump pressure are shown in Fig 9. With the decrease in the leakage resistance of the hydro-motor, the steady-state system pressure as well as fluctuation of the pressure reduces. Similar effects are observed in the case of the speed of the hydro-motor. The typical values of the fluid properties used in the simulation studies are given in Table 2. Table 2 Typical parameter values for different types of fluids
Fluid Type Kinematic Viscosity (µ) Bulk Modulus of the fluid (β) Mineral Oil 0.02 N s /m2 1.70 × 109 N/m5 Water Glycol 0.05 N s /m2 1.85 × 109 N/m5 Water-In-Oil Emulsion 0.065 N s /m2 2.0 × 109 N/m5

K. Dasgupta, S. K. Ghoshal and N. Kumar / Journal of Modeling, Simulation, Identification, and Control (2013) Vol. 1 No. 3 pp. 89-104
102
Fig. 9(a): Effect of motor leakage resistance on the transient response of Pressure of two motor system
Fig. 9(b): Effect of motor leakage resistance on the transient response of load speed of two motor system
The above results are consistent with the findings of Dasgupta et al. (1999) that the dominant parameters of the system’s performance are the leakage of the system, the compressibility of the fluid and the applied load resistance.
5. Conclusions This article proposes an alternative drive line concept for an HEMM. In this respect a simulation model of a two-motor summation drive has been built up to study its dynamic performance and a non-linear bondgraph model is proposed. The simulation studies have been made with respect to the typical load cycle of the machine. Using realistic parametric values of the hydrostatic components of the system obtained from the product literature, the simulation results are obtained. Due to the variation of the load resistance, the drive mode of the proposed hydrostatic system changes from twin motor to single motor or vice-a -versa. The effects on the system responses due to the changes in the drive mode are analysed. The system performance has also been analysed with respect to the different types of fluids. The following conclusions are derived from the above studies: • The vehicle with the variable load demand, to restrict the maximum system pressure, two motor summation drive may be an alternative drive concept. • With the decrease in the load resistances (Ri), the pressure and the speed responses become more oscillatory and also the settling time of the system response increases. With the increase in the value of Ri the steady-state system pressure increases and the speed decreases. • With the increase in the bulk stiffness of the fluid, the peak pressure as well as the fluctuation of the fluid pressure increases. It increases the settling time of the system’s response. Similar effects are observed for the drive speed. • With the decrease in the leakage resistance of the hydro-motor, the steady-state system pressure as well as fluctuation of the pressure reduces. Similar effects are observed in the case of the speed of the hydro-motor.

K. Dasgupta, S. K. Ghoshal and N. Kumar / Journal of Modeling, Simulation, Identification, and Control (2013) Vol. 1 No. 3 pp. 89-104
103
It is seen that due to change in the drive mode, there is sudden change in the speed and the system pressure. While frequent changes in the load are encountered by the HEMM, such effects may be detrimental to the gear unit that connects both the motors. Therefore, the challenges with such drive concept is the disconnection and reconnection of one motor with the other through gear unit, so that fast, stable, smooth and vary small speed and torque disturbances of the of the drive unit are obtained. The reconnection can be realized and controlled in several ways. One of them is through the disc clutches; however, it may lead to losses, especially at high speeds caused due to high viscous friction. Another solution may be either by pump control or secondary control of the disconnected motor in the connection process through suitable control logic. In this respect detail simulation study and laboratory test are needed as proposed by Sannelius et. al (1998). Considering the above fact, the proposed model may be further refined by incorporating suitable control algorithms to make the connection/ disconnection of the hydro-motor fast and smooth. It is further concluded that as an alternative drive line concept, the work presented in this article may be useful for the initial design and selection of such drive for an HEMM. The model can be used to predict trend of the system responses under various loading conditions and types of fluid used that are difficult to create experimentally. Such model may be useful for the initial design and selection of similar system or fluids for a given application where one can easily obtained more economical solution using the ideas developed here.
Acknowledgements The Research and Development project grant for 2009-2012 from University Grants Commission, Government of India, for carrying out the research work in this topic is gratefully acknowledged.
References Chappel, P. J., 1986. Modelling of a radial piston hydraulic motor. Proc Inst Mech Eng Part I, J Syst Control Eng,
206, 171-180. http://dx.doi.org/10.1243/PIME_PROC_1992_206_328_02 Dasgupta, K, Mukherjee, A. and Maiti, R, 1999. Estimation of critical system parameters that affect orbit motor
performance - combining simulation and experiments. Journal of Manufacturing Science and Engineering, Vol. 121, Issue 2, pp. 300-306.
http://dx.doi.org/10.1115/1.2831220 Dasgupta, K., 2000. Analysis of hydrostatic transmission system using low-speed-high-torque motor.
Mechanism and Machine Theory, 35, 1481–1499. http://dx.doi.org/10.1016/S0094-114X(00)00005-7 Dasgupta, K., Watton, J., Pan, S., 2006. Open-loop dynamic performance of a servo-valve controlled motor
transmission system with pump loading using steady-state characteristics. Mechanism and Machine Theory, 41, 262 – 282.
http://dx.doi.org/10.1016/j.mechmachtheory.2005.06.005 Mandal, S. K., Dasgupta, K., Pan, S., Chattopadhyay, A., 2009. Theoretical and experimental studies on the
steady-state performance of low-speed high-torque hydrostatic drives. Part 1: Modelling. Proc IMechE, Part C, 223, 2663-2674.

K. Dasgupta, S. K. Ghoshal and N. Kumar / Journal of Modeling, Simulation, Identification, and Control (2013) Vol. 1 No. 3 pp. 89-104
104
Mandal, S. K., Dasgupta, K., Pan, S., Chattopadhyay, A., 2009. Theoretical and experimental studies on the steady-state performance of low-speed high-torque hydrostatic drives. Part 2: Experimental investigation. Proc. IMechE, Part C, 223, 2675-2685.
Manring, N. D., Luecke, G. R., 1998. Modelling and designing a hydrostatic transmission with a fixed displacement motor. Journal of Dynamic Systems Measurement and Control, Trans ASME, 120, 45-49.
Mukherjee, A., Karmakar, R., 2000. Modelling and simulation of engineering systems through bondgraph, first edition, Narora Publishing House, New Delhi,
Mukherjee A. and Samantaray A. K., "System modelling through bond graph objects on SYMBOLS 2000", Proceedings ICBGM'01, Simulation Series, Vol. 33, No. 1, ISBN: 1-56555-103-6, pp. 164 - 170, 2001.
Sannelius, M., Rydberg, K. E., Palmberg, J. O., 1998. Hydrostatic Transmissions for wheel loaders – Control Aspects of a Multi-Motor Concept. Proceedings of the 1st International Fluid Power conference, Aachen, Germany, Vol. 2, pp. 389-402.
Watton, J., 1986. The stability of electro-hydraulic servo-motor systems with transmission lines and non-linear motor friction effects- Part A: System Modelling. J Fluid Control, 16 (2-3), 118-136.
Nomenclature C Single port energy storage capacitor element in bondgraph model Dp Main Pump displacement Dm Motor displacement I Single port energy storage inertial element in bondgraph model Jld Load Inertia Kp Bulk stiffness of the fluid at the pump plenum Km Bulk stiffness of the fluid at the motor plenum Pps Pump pressure of single motor drive system Pmd Pump pressure of two motor drive system Pms Motor pressure of single motor drive system Pmd Motor pressure of two motor drive system Pmp Motor pressure working as pump Psmp Sump pressure pld Load momentum of the two motor drive system pls Load momentum of the single motor drive system R Single port resistive element Rlkgp Leakage resistance of the pump Rlkgm Leakage resistance of the motor Rld Load resistance Rdcv Valve resistance Rlow Resistance of the relief valve at Low pressure SF Single port source of flow element in bondgraph model SE Single port source of effort element in bondgraph model
sV Theoretical flow supplied by the pump
ωp Pump speed ωmd Load speed of double motor drive system