Embed Size (px)
Citation preview

Chapter 1
UNIFIED MODELLING FRAMEWORK OFMULTI-STAGE PRODUCTION-INVENTORYCONTROL POLICIES WITH LOT SIZINGAND ADVANCE DEMAND INFORMATION
George LiberopoulosDepartment of Mechanical and Industrial EngineeringUniversity of Thessaly, Pedion Areos, GR-38334, Volos, [email protected]
Isodoros TsikisDepartment of Mechanical and Industrial EngineeringUniversity of Thessaly, Pedion Areos, GR-38334, Volos, [email protected]
1

2
1. IntroductionEvery operations manager should be familiar with the terms reorder
point policy (RPP), material requirements planning (MRP) and just intime (JIT). These terms have been used to describe three widely prac-ticed approaches for coordinating the flow of material in multi-stageproduction-inventory systems. The literature advocating one or theother approach is voluminous. Each approach has its merits and itsdrawbacks; however, which approach is overall better remains a point ofcontroversy among practitioners and researchers. In a growing literaturethat brings to light this controversy it is often pointed out that “whichapproach is better?” may not be the correct question to ask, since mostreal systems include all three approaches anyway.
The main difficulty in comparing RPP, MRP and JIT systems is thatthey have emerged at different points in time, within different scientificcultures, and under different modelling assumptions. Thus, RPPs weredeveloped for make-to-stock pure inventory systems, and MRP was de-veloped as a computerized stage coordination tool in a deterministic,discrete-time setting, with advance demand information (ADI) in theform of a finite, planning horizon. Finally, the kanban system, the singletechnique most closely associated with JIT practices, was developed asa manual production control mechanism in Toyota’s automobile produc-tion lines.
The purpose of this chapter is not to study the controversy of RPP vs.MRP vs. JIT. Some of the important issues related to this controversyare discussed in [11] and references therein. Instead, the goal of thischapter is to (1) provide a unified modelling framework to facilitate theprecise description and comparison of the dynamic behavior of simpleproduction-inventory control policies with ADI, which can be charac-terized as RPP, MRP or JIT, (2) develop hybrid policies by combiningsimpler policies, and (3) bring to light properties of these policies. Byexposing the dynamics and properties of production control policies in acommon modelling framework, we hope to provide a connection betweenRPPs, MRP, and JIT and show that all three approaches are related andcan coexist.
The proposed modelling framework extends the framework for multi-stage production-inventory control mechanisms with lot sizing, devel-oped in [10] and [11], to include policies that deal with perfect ADI.Most of the related literature review can be found in [11] and [9]. Thelatter reference is another chapter of this volume, which presents ana-lytical and numerical results on single-stage and two-stage production-inventory control policies with ADI but no lot sizing.

Multi-Stage Production-Inventory Control Policies 3
Initially, we focus our attention on two of the most common RPPs,installation stock and echelon stock (Q, r) policies, to which we refer asIS and ES policies, respectively, for notational simplicity. We show thatIS policies with ADI are equivalent to continuous-time MRP systemswith fixed lot ordering quantity. MRP systems are used quite routinelyin practice. A flaw of MRP systems, and RPPs in general, when usedfor production control, is that they assume infinite processing capacity,whereas actual manufacturing systems have finite capacity. In a ca-pacitated manufacturing environment, the use of WIP-cap mechanisms,such as kanban-type policies, is more appropriate. In this chapter, werestrict our attention to two kanban-type policies, installation kanbanand echelon kanban policies, to which we refer as IK and EK policies,respectively, for notational simplicity.
An IK policy is closely related to what most researchers and practi-tioners understand as an ordinary kanban system, although there doesnot seem to be an agreed upon definition of what a kanban system ex-actly is [10]. According to an IK policy, each stage (or installation) hasassociated with it a number of installation kanbans, so that when a partleaves a stage, it releases an installation kanban of this stage, which canthen be used to authorize the release of a new part into the stage. AnEK policy with unit lot size is equivalent to what Buzacott and Shan-thikumar [5] refer to as an integral control system. According to an EKpolicy, each stage has associated with it a number of echelon kanbans, sothat when a part leaves the entire system, it releases one echelon kanbanfor each stage, which can then be used to authorize the release of a newpart into that stage. Liberopoulos and Dallery [11] point out that whenthe number of echelon kanbans of the first stage is smaller than or equalto the number of echelon kanbans of all other stages, the resulting EKpolicy is equivalent to a make-to-stock CONWIP policy with lot sizing.They also note that EK policies use global information and may there-fore have an advantage in terms of performance over IK policies, whichuse only local information. Both IK and EK policies, when used alone,however, have the disadvantages that (1) they do not communicate cus-tomer demand information to all upstream stages as quickly as IS andES policies with ADI, (2) they use a single parameter to characterizeboth the base stock level and the number of kanbans at each stage, and(3) they can not take advantage of ADI.
An obvious way to address the flaw of IS and ES policies with ADI,when used for production control, and the disadvantages of IK and EKpolicies, is to combine an IS or an ES policy with ADI with an IK or anEK policy to form a more sophisticated hybrid policy. In this chapterwe restrict our attention to hybrid policies that result as combinations

4
of an IK policy with an IS or an ES policy with ADI and omit hybridpolicies that result as combinations of an EK policy with an IS or an ESpolicy with ADI, due to space considerations and because (1) IK policiesare more conventional than EK policies, and (2) hybrids of EK policieshave similar structural properties with hybrids of IK policies.
First, we note that there exist more hybrids of IK policies when thereis ADI than when there no ADI. Then, we note that some hybrid poli-cies are special cases of other hybrid policies. In particular, we point outthat the combination of an IK policy with an IS or an ES policy withADI can be achieved in a synchronized or an independent way, lead-ing to synchronized and independent hybrid policies, respectively, wheresynchronized policies can be further divided into policies with delay be-fore synchronization (DBS) or delay after synchronization (DAS). Thisimplies that there are six combinations of an IK policy with an IS oran ES policy with ADI. It turns out, however, that only three of themare distinct, the other three being special cases of the distinct policies.The three distinct hybrid policies are: (1) synchronized DAS IK/IS poli-cies with ADI, (2) synchronized DAS IK/ES policies with ADI, and (3)independent IK/ES policies with ADI. We refer to these three hybridpolicies as policies A, B and C, respectively. We then note that policyA is equivalent to the PAC system proposed by Buzacott and Shan-thikumar [5], which is one of the first hybrid policies to appear in theliterature. Policy C, on the other hand, is an extension of the extendedkanban control system (EKCS), proposed by Dallery and Liberopoulos[6], with lot sizing and ADI. Finally, we develop evolution equations us-ing “max, +” notation to mathematically describe the dynamic behaviorand derive properties of the three hybrid policies with ADI.
As was mentioned above, one of the main intended usages of the pro-posed framework is to provide a unified modelling representation thatallows the precise description of the dynamic behavior and properties ofdifferent production-inventory control policies with ADI. We find thatmany definitions of control policies that we have encountered in the lit-erature are ambiguous in describing the exact operation of the policiesthey refer to and/or their relationship to other policies. The frame-work of a queuing network representation that we use in this chapteris a precise tool for describing the operation of different policies andthe connections between them. This framework can also be very use-ful for developing analytical or simulation models of control policies forperformance evaluation purposes.
The queuing network representations, however, especially of hybridpolicies, can be quite complicated to the unaccustomed reader. Thiscomplexity is unavoidable and stems from two sources. Firstly, the

Multi-Stage Production-Inventory Control Policies 5
representations are purposely quite detailed in order not to leave anydoubts to the reader about the exact operation of the control policiesthey model. Thus, they employ (1) synchronization stations to model thematching or batching of parts, demands and production authorizations(kanbans), and (2) delays in the processing of parts and in the transfer ofdemands and/or kanbans. An alternative but not less detailed represen-tation tool would be a Petri net. Secondly, hybrid policies are inherentlymore complicated that RPPs and kanban policies because they are com-binations of the latter policies. Not all hybrid policies, however, appearto be equally complicated. The simplest hybrid policy appears to bepolicy C, which as was mentioned above is an extension of an EKCSwith lot sizing and ADI.
Finally, the practical implementation of production control policiesdoes not have to involve the physical transfer of “real kanban cards” and“demand slips.” The control policies can be implemented via electronicinformation transfers that take place every time the state of the queuingsystem changes (e.g., whenever a demand for a production lot arrives toa stage or a production lot leaves a stage).
The remaining of this chapter is organized as follows. In Section2, we present modelling assumptions that are common in all the controlpolicies discussed in subsequent sections. In Section 3, we present modelsof IS and ES policies with ADI, and in Section 4, we present models ofIK and EK policies. In Section 5, we present models of hybrid policieswhich result as combinations of an IK policy with an IS or an ES policywith ADI. In Section 6, we present properties of these hybrid policies,and in Section 7, we derive evolution equations, using “max, +” algebra,to describe their dynamic behavior. Finally, we conclude in Section 8.A list of notations and abbreviations is given in an Appendix.
2. Modelling AssumptionsWe consider an N -stage serial production-inventory system. Every
stage consists of a work-in-process (WIP) facility, where parts are pro-cessed, followed by a finished goods (FG) output store, where processedparts are stored. We assume that the system has access to perfect ADIover a finite time horizon. More specifically, we assume that customersarrive randomly in time and that each customer places an order fora non-fixed number of end items, i.e. stage-N FG, to be delivered tohim/her exactly T time units after the time of his/her arrival. The or-der can be neither cancelled nor modified, and T is referred to as thedemand lead time.

6
The arrival of every customer demand triggers the consumption of anend-item from FG inventory and the placement, activation, and releaseof a replenishment production order to the WIP facility of each stagein the system. The consumption of an end-item from FG inventoryis triggered T time units after the arrival time of the demand. If noend-items are available at that time, the demand is backordered. Theplacement, activation, and release of replenishment production ordersto the facilities of each stage depend on the control policy in place. Tospeed up the replenishment process, FG inventory at some or all thestages may have been built up to a certain target level ahead of time,i.e. before any demands have arrived to the system.
We have used the terms “placement,” “activation,” and“release” todescribe the three different phases in the life of a replenishment order.These phases are defined as follows. When an order is placed at a stage,the stage receives the order information. When an order is activated,parts corresponding to the order are requested to be released into theWIP facility of the stage for processing. When an order is released, partscorresponding to the order are actually released into the WIP facility ofthe stage for processing. The placement, activation, and release of areplenishment order are indicated in Figures 1.1 and 1.2 in the queuingnetwork representations of the IS and ES policies with ADI in Section3.
We assume that there is an infinite supply of raw parts feeding the firststage. FG inventory levels at all stages are followed continuously, andreplenishments of FG inventory may be ordered at any time. There isa setup cost associated with placing and processing an order; therefore,orders are placed and released for processing in batches or lots. Demandsthat are waiting for the arrival of other demands to complete a lot arereferred to as single demands (SD). More specifically, we assume that areplenishment order at stage n is placed for the least integer number oflot sizes Qn. We make the common assumption that the order lot sizessatisfy
Qn = jnQn+1, n = 1, 2, . . . , N, and QN+1 = 1, (1.1)
for some positive integers jn. Assumption (1.1) is necessary if the ra-tioning policy is to satisfy all or nothing of a production order, becausethen the FG inventory at every stage should always consist of an integernumber of downstream lot sizes, except for the last stage, where the ra-tioning policy allows the partial satisfaction of a customer order as longas stock is available. Besides simplifying material handling, the integerratio constraint (1.1) also simplifies the analysis significantly. The costincrease due to constraint (1.1) is likely to be insignificant due to theinsensitivity of inventory costs to the choice of order quantities.

Multi-Stage Production-Inventory Control Policies 7
In the presence of ADI, it may be cost effective to introduce a delib-erate time delay between placing and activating an order, particularly ifthe demand lead time T is long. An order that has been placed but hasnot yet been activated is referred to as an outstanding demand (OD). Anorder that has been activated may not be immediately released due tothe temporary lack of parts or production authorizations (kanbans), ifsuch authorizations are necessary. An order that has been activated buthas not yet been released is referred to as a backordered demand (BD).
The deliberate delay between placing and activating a replenishmentorder depends on the so-called installation and echelon planned leadtimes associated with each stage. These lead times are design parame-ters, which are defined as follows. The installation planned lead time ofstage n is denoted by ln and is a specified fixed control parameter thatis related to the flow time of a typical part through the facility of thestage. It has the same meaning as the “lead time” in MRP systems. Theechelon planned lead time of stage n is denoted by Ln and is the sum ofthe installation planned lead times of the stage and all its downstreamstages, i.e.
Ln =N∑
k=n
lk, n = 1, 2, . . . , N. (1.2)
With the above definitions in mind, the time of activating a replenish-ment order at stage n is determined using an MRP time-phasing logicby offsetting the due date of the demand that triggered the order bythe stage echelon planned lead time Ln. This means that the order isactivated without delay, if Ln ≥ T , or with a delay equal to T −Ln withrespect to the demand arrival time, if Ln < T . In other words, the delayin activating an order, which id denoted by Tn, is given by
Tn = max(0, T − Ln), n = 1, 2, . . . , N. (1.3)
3. Installation Stock (IS) and Echelon Stock(ES) Policies with ADI
Two of the most widely used RPPs are IS and ES policies. There aretwo common variants of IS and ES policies, depending on whether thereorder quantity is fixed or variable. In the first case they are usuallyreferred to as (Q, r) policies, and in the second case they are usually re-ferred to as (s, S) policies. In this section, we extend the definitions of ISand ES policies presented in [11] to include ADI. We restrict our atten-tion to (Q, r) policies only, because (1) (Q, r) policies are perhaps morewidely used than (s, S) policies, and (2) (s, S) policies have the similarstructural properties to (Q, r) policies. With this in mind, henceforth,

8
when we refer to IS and ES policies, we shall mean IS and ES (Q, r)policies.
When a multi-stage production-inventory system is controlled by anIS or an ES policy with ADI, every stage is controlled by a (Q, r)-rulebased on its inventory position. This means that as soon as the inventoryposition of stage n falls at or below a reorder point rn, a replenishmentorder is placed for the least integer number of lot sizes Qn that raises theinventory position above rn. Once a replenishment order has been placedat stage n, it becomes an outstanding demand that will be activated aftera time delay Tn, given by expression (1.3).
The difference between IS and ES policies with ADI lies in the defini-tion of the inventory position. In an IS policy with ADI, the inventoryposition at stage n is defined as the installation stock at stage n, i.e.stock on hand (stage-n FG) plus outstanding orders (stage-n WIP +BD + OD) minus backorders (stage-(n+1) BD + OD). In an ES policywith ADI, the inventory position at stage n is defined as the echelonstock at stage n, i.e. the sum of the installation stocks at stage n andall its downstream stages. In other words, the installation and echelonstock at stage n, which are denoted by in and In, respectively, are relatedas follows:
In =N∑
k=n
ik, n = 1, 2, . . . , N, (1.4)
in = In − In+1, n = 1, 2, . . . , N. (1.5)
With the above definitions in mind, the decision to place an order ateach stage is based on local information in an IS policy, and on globalinformation in an ES policy. The parameters Qn and rn are in generaldifferent for each stage.
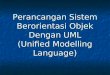
Queuing network model representations of a two-stage production-inventory system operating under an IS policy with ADI and an ESpolicy with ADI are shown in Figures 1.1 and 1.2, respectively. Thesymbolism used in Figure 1.1 and all other figures that follow in the restof the paper is the same as that used in [11], except for the delay circlesODn, which are new elements related to ADI. The symbols in Figure 1.1have the following meaning.
The ovals represent WIP facilities, where manufacturing and/or trans-portation delays take place. The circles represent delays in the activa-tion of orders. These delays are given by expression (1.3). The ovalsand circles are named according to their content, and their initial valueis indicated inside parentheses. For example, the delay in activating anorder at stage 1 is represented by the circle OD1. This means that whenan order enters the delay circle OD1, it stays there for exactly T1 time

Multi-Stage Production-Inventory Control Policies 9
�
����
� � �� ��� � �� � �
��
� �� � ���
�� �� ��� �
������
���������
����������
���������
��������
��� �� �
�������
�������
�� ���
�� ���
�������
��������
�
������
���
� ��� � �� � �
������ ������� �������
������
����� ��
������
������� �
������
������
��������
Figure 1.1. Queuing network model representation of a two-stage production-inventory system operating under an IS policy with ADI.
����
�
�� �� � ����
�� �� ���
� �� � �� ��
��� �����
��� ����
�������
���� �� ���������
��� ����������
��������
��
������� �������
��� ���
����
� � �� ��� � �� � � ����
� � �� ��� � �� � �
������� ������� �������
������
��� ����
������
�����������
������
�������
Figure 1.2. Queuing network model representation of a two-stage production-inventory system operating under an ES policy with ADI.
units before it is activated, i.e. before it departs from OD1 and entersinto BD1, where T1 is given by (1.3). Initially, OD1 is empty, as isindicated by the “(0)” next to the symbol“OD1.”
The queues followed by vertical bars represent synchronization sta-tions. The queues are named according to their content, and their initialvalue is indicated inside parentheses. For example, the queue represent-ing the FG output store of stage 1 is named FG1 and its initial value isi0n, i.e. i0n denotes the initial installation stock of stage 1. Every synchro-nization station has a marking on its side. This marking indicates thelot size needed in order to activate the synchronization station, i.e. theminimum number of customers that must be present in each queue toactivate the synchronization station. For example, queues FG1 and BD2
are linked in a synchronization station marked with “Q2.” This means

10
than as soon as there are at least Q2 parts in FG1 and Q2 demands inBD2, then exactly Q2 parts depart from FG1 and are released into WIP2.At the same time, exactly Q2 backordered demands depart from BD2
and are discarded since they are satisfied. Another example is the syn-chronization station consisting of a single queue, SD1, which is markedwith “Q1.” This marking means that as soon as there are at least Q1
demands in SD1, then exactly Q1 demands depart from SD1 and enterinto the delay circle OD1. The initial condition of SD1 is ri
1 + Q1 − i01,where ri
n denotes the installation stock reorder point of stage n.Notice that in both policies, if the demand lead time T is equal to
zero, i.e. if there is no ADI, then all the delays Tn are also equal tozero by (1.3), and therefore all the delay circles are redundant and canbe eliminated. Even if the demand lead time T is not equal to zero,however, i.e. if there is ADI, the models in Figures 1.1 and 1.2 haveexactly the same structure as the corresponding models without ADI,once we view ODn and BDn as a single queue. This is an importantobservation, because it implies that all of the properties of IS and ESpolicies without ADI developed in [1], [2] and [3] and reinterpreted in[11] carry over to the case where there is ADI. These properties aresummarized below.
An IS policy with ADI is always nested in the sense that when anorder is placed at stage n, then orders must have been simultaneouslyplaced at all downstream stages as well. The behavior of an IS policywith ADI does not depend on the initial installation stock positions i0n,but only on the echelon planned lead times Ln, the installation stockreorder points ri
n, and the reorder quantities Qn. An IS policy with ADIcan always be replaced by an equivalent ES policy with ADI. Unlike ISpolicies with ADI, ES policies with ADI generally depend on the initialechelon stock positions Ie
n, as well as on the echelon planned lead timesLn, the echelon stock reorder points re
n, and the reorder quantities Qn.Also, unlike IS policies with ADI, ES policies with ADI are not alwaysnested. An ES policy with ADI is nested if the initial installation stockinventory positions satisfy a certain condition. In this case, the resultingnested ES policy with ADI can be replaced by an equivalent IS policywith ADI.
Even though the behavior of an IS policy with ADI does not dependon the initial installation stock positions i0n, the initial installation stockpositions do play a role. Namely, they determine the number of demandsfor stage-n FG inventory that must arrive before a replenishment orderof size Qn is placed at stage n. Without loss of generality, we mayassume that
i0n = rin + knQn+1, n = 1, 2, . . . , N, (1.6)

Multi-Stage Production-Inventory Control Policies 11
where kn is an integer such that 1 ≤ kn ≤ jn. Assumption (1.6) guaran-tees that the inventory of stage n is at the reorder point exactly whenplacing an order. There are two extreme values for kn: one where kn = jn
and another where kn = 1. If kn = jn, the initial installation stock posi-tions are equal to their maximum levels, i.e. i0n = ri
n+jnQn+1 = rin+Qn.
In this case, exactly Qn demands, or jn lots of demands of size Qn+1,must arrive before a replenishment order of size Qn is placed at stage n.On the other hand, if kn = 1, the initial installation stock positions areequal to their minimum levels, i.e. i0n = ri
n + Qn+1. In this case, exactlyone lot of demands of size Qn+1 must arrive before a replenishment orderof size Qn is placed at stage n. In the first case, replenishments coverpast demands, whereas in the second case, they cover future demands.The second case corresponds exactly to the way an MRP system withfixed order quantity as its lot sizing rule operates in a continuous reviewsetting. This is stated as follows.
If the flow time of every replenishment order through the WIP facilityof stage n is constant and equal to ln, and kn = 1 so that i0n = ri
n+Qn+1,for n = 1, 2, . . . , N , the resulting IS policy with ADI behaves exactly likean MPR system with fixed order quantity as its lot sizing rule.
Given that an MRP system with fixed order quantity as its lot sizingrule is equivalent to an IS policy with ADI and that an IS policy withADI is a special case of an ES policy with ADI, it follows that an MRPsystem with fixed order quantity is a special case of an ES policy withADI; therefore, an ES policy with ADI may be viewed as a broaderdefinition of an MRP system with fixed order quantity as its lot sizingrule. With this in mind, we presume that it is this broader definitionof an MRP system that Asxater and Rosling [2] have in mind, whenthey claim that any IS policy and any ES policy (without ADI) can beduplicated by an MRP system.
Finally, in case of unit lot sizes, i.e. if Qn = 1, n = 1, 2, . . . , N + 1, anIS policy with ADI is identical to an ES policy with ADI, and they areboth equivalent to what Karaesmen et al. refer to as a base stock policywith a release time parameter [8].
4. Installation Kanban (IK) and EchelonKanban (EK) Policies
The original kanban system was developed as a manual informationsystem for implementing JIT at Toyota’s automobile production lines.The last two or three decades have seen a surge in the literature on

12
kanban systems, but there seems to be no agreed upon definition of whata kanban system exactly is [10]. Motivated by the preceding discussionregarding IS and ES policies, Liberopoulos and Dallery [11] introducedthe notions of “installation kanbans” and “echelon kanbans,” which ledto the definitions of installation kanban (IK) and echelon kanban (EK)policies, respectively, in the case where there is no ADI. In both policies,the placement of a replenishment production order to the facility of eachstage, triggered by the arrival of a customer demand, is initiated afterthe consumption of a part from FG inventory.
In case there is ADI, since the consumption of a part from FG inven-tory is activated T time units after the arrival time of the demand, thedemand lead time T is totally unexploited as far as the placement of thereplenishment policy is concerned. This implies the following importantfact.
IK and EK policies can not take advantage of ADI.
To put it differently, IK and EK policies with ADI behave exactly likeIK and EK policies without ADI, respectively. Nevertheless, in the restof this section, we will recall some of the basic facts about IK and EKpolicies without ADI, developed in [11], because we will use them laterin Sections 5 - 7 in our discussion of hybrid policies with ADI.
In a multi-stage production-inventory system controlled by an IK oran EK policy, every stage n has associated with it a finite number ofauthorization cards or kanbans. This number is equal to an integermultiple of the stage lot size Qn. A kanban may be either free or attachedonto a part. A free stage-n kanban is used to signal a customer demandfor one part at stage n. Kanbans, like parts, move in lots of size Qn.Specifically, when Qn free stage-n kanbans have accumulated at stagen, an order of equal size, i.e. Qn, is placed at stage n. If Qn parts areavailable in stage-(n − 1) FG inventory, the free kanbans are attachedonto the parts and the combined lot, i.e. the Qn parts plus their kanbans,is released into the WIP facility of stage n. The kanbans remain attachedto the parts until the combined lot reaches a certain final FG outputstore. When a part exits that output store, because it is consumed bythe next downstream stage or by a customer (if the final FG output storeis the output store of the last stage), the kanban that was attached toit is detached and becomes free. This free kanban is used once again tosignal a customer demand for one part at stage n so that when Qn freekanbans have accumulated, an order of equal size is placed at stage n.
The difference between IK and EK policies lies in the definition of thefinal FG output store, i.e. the point after which kanbans are detached

Multi-Stage Production-Inventory Control Policies 13
from parts. In an IK policy, the final FG output store at stage n isthe FG output store of stage n. In an EK policy, it is the FG outputstore of the last stage, i.e. stage N . This means that in an IK policy,a stage-n kanban follows a part through the WIP facility and the FGoutput store of stage n and is detached from the part after the partleaves the FG output store of stage n. In an EK policy, on the otherhand, a stage-n kanban follows a part through the WIP facilities and FGoutput stores of stages n through N and is detached from the part afterthe part leaves the FG output store of stage N . This implies that in anIK policy, the decision to place an order at each stage is based on localinformation, whereas in an EK policy it is based on global informationfrom all downstream stages. The kanbans used in IK and EK policiesare referred to as installation kanbans and echelon kanbans, respectively.Note that in an IK policy, every part in the WIP facility or FG outputbuffer at stage n has attached onto it a stage-n installation kanban. Inan EK policy, on the other hand, every part in the WIP facility or FGoutput buffer at stage n has attached onto it one echelon kanban fromeach of stages 1 through n. This means that in an EK policy, when anend item is consumed by a customer, N echelon kanbans are detachedfrom the part and become free.
The practical implementation of kanban policies does not have toinvolve the physical transfer of actual kanban cards. Kanban policiescan be implemented via electronic information transfers that take placeevery time the system state changes (e.g., whenever a demand for aproduction lot arrives to a stage or a production lot leaves a stage).
The queuing network model representations of a two-stage production-inventory system operating under an IK and an EK policy are shown inFigures 1.3 and 1.4, respectively. Next, we summarize some importantfacts about IK and EK policies, which were developed in [11].
����
�
�� �� � ����
�� �� ���
� ��
� �� ��
��� �����
��� ����
�������
���� ��
�������
��������
��� ���
������
����
� � �� ��� � �� �
�������
��������
���������
����
� � �� ���� �� �
Figure 1.3. Queuing network model representation of a two-stage production-inventory system operating under an IK policy.

14
����
�
�� �� � ����
�� �� ���
� ��
� �� ��
��� �����
��� ����
�������
���� ��
�������
��������
��� ���
���
���
����
� � �� ��� � �� �
�������
��������
���������
����
� � �� ��� � �� �
Figure 1.4. Queuing network model representation of a two-stage production-inventory system operating under an EK policy.
In an IK policy, the installation stock reorder point at stage n isdefined as ri
n = (Kin − 1)Qn, where Ki
n is an integer such that Kin ≥
1, and KinQn is the number of installation kanbans at stage n. The
behavior of an IK policy does not depend on the initial installationstock positions but only on the reorder quantities Qn and the integersKi
n. In an IK policy, demand is communicated at a stage only when FGinventory is consumed by the next downstream stage or by a customer.A consequence of this is that an IK policy can not take advantage of ADI,as was mentioned earlier. Another consequence is that an IK policy isnever nested in the sense that an IS policy is. A third consequence isthat in an IK policy, the WIP + FG inventory at every stage is alwaysbounded by the number of installation kanbans.
In an EK policy, the echelon stock reorder point at stage n is definedas re
n = (Ken − 1)Qn, where Ke
n is an integer such that Ken ≥ 1, and
KenQn is the number of echelon kanbans at stage n. Unlike IK policies,
EK policies generally depend on the initial echelon stock positions aswell as on the reorder quantities Qn and the integers Ke
n. An EK pol-icy may never be nested in the sense that an ES policy may be nested.Nonetheless, under a certain condition, an EK policy may be partiallynested in the sense that when an order is placed at stage n, then ordersmust have simultaneously been placed at all but the last downstreamstages. Unlike a nested ES policy, which can always be replaced by anequivalent IS policy, a partially nested EK policy can never be replacedby an equivalent IK policy. In an EK policy, demand is communicated ata stage only when an end item from FG inventory is consumed by a cus-tomer. Finally, an EK policy with Ke
nQn ≥ Ke1Q1, for n = 2, 3, . . . , N ,
is equivalent to a make-to-stock CONWIP policy [12] with a WIP-capof Ke
1Q1.

Multi-Stage Production-Inventory Control Policies 15
Liberopoulos and Dallery [11] mention that an important advantageof IK and EK policies over IS and ES policies is that the former policiesimpose an upper bound on the WIP + FG inventory, whereas the latterpolicies do not. One of the disadvantages of IK and EK policies, however,is that they do not communicate customer demand information to allupstream stages as quickly as IS and ES policies. This disadvantagehas a direct impact on customer service since it implies longer customerresponse times, particularly if customer demand is highly variable. Italso implies that the capacity of the system depends on the number ofkanbans. Another disadvantage of IK and EK policies is that they cannot exploit ADI, as was mentioned earlier.
One way to overcome the disadvantages of kanban policies and in-crease customer service and system capacity is to uncouple (1) the ac-tions of detaching a kanban and communicating demand information,and (2) the initial FG inventory and reorder point from the number ofkanbans at every stage. This can be accomplished by combining an IKor an EK policy with an IS or an ES policy with ADI to form a moresophisticated hybrid policy. In the next section we will study such hy-brid policies; however, we will limit our attention to hybrid policies thatresult as combinations of an IK policy with an IS or an ES policy withADI and omit hybrid policies that result as combinations of an EK pol-icy with an IS or an ES policy with ADI, due to space considerations andbecause (1) IK policies are more conventional than EK policies and (2)hybrids of EK policies have similar structural properties with hybridsof IK policies. The analysis of hybrids of IK policies with ADI can beextended with little effort to hybrids of EK policies with ADI.
5. Hybrid IK/IS and IK/ES Policies with ADIA hybrid IK/IS or IK/ES policy with ADI is a combination of an IK
policy with an IS or an ES policy with ADI, respectively In a hybridIK/IS or IK/ES policy with ADI, installation kanbans trace a closed-loop trajectory within each stage and are detached from the FG outputstore of their stage as in an IK policy; however, when an installationkanban is detached from a part in FG inventory, it does not carry withit customer demand information to the previous stage, as is the case inan IK policy. Instead, demand is communicated according to the IS orES with ADI in place.
When there is no ADI, Liberopoulos and Dallery [11] differentiatebetween two types of IK/IS and IK/ES policies: synchronized and in-dependent. The same differentiation holds when there is ADI; however,synchronized IK/IS and IK/ES policies with ADI are further divided

16
into policies with a delay before synchronization (DBS) or a delay aftersynchronization (DAS). The similarities and differences between inde-pendent, synchronized DAS and synchronized DBS IK/IS and IK/ESpolicies with ADI are presented next.
In all three types of hybrid policies, i.e. independent, synchronizedDAS and synchronized DBS IK/IS and IK/ES policies with ADI, theactions of detaching a kanban and communicating demand are uncou-pled. Moreover, in all cases, the initial FG inventory and the reorderpoint are not determined by the number of kanbans, as is the case inIK policies. Finally, in all cases, customer demands are communicatedaccording to the RPP (IS or ES) with ADI in place.
The difference between the three types of hybrid policies has to dowith the particular phase in the life of an order, i.e. the placement,activation or release phase (see the discussion in Section 2), that a stage-n installation kanban authorizes once it is detached from a part in stage-nFG inventory. Thus, in a synchronized DAS IK/IS or IK/ES policy withADI, when a stage-n installation kanban is detached from a part in stage-n FG inventory, it is used to authorize the placement of a replenishmentorder for one part at stage n. In a synchronized DBS IK/IS or IK/ESpolicy with ADI, when a stage-n installation kanban is detached from apart in stage-n FG inventory, it is used to authorize the activation of areplenishment order for one part at stage n. Finally, in an independentIK/IS or IK/ES policy policy with ADI, when a stage-n installationkanban is detached from a part in stage-n FG inventory, it is used toauthorize the release of a replenishment order for one part at stage n.
In other words, in a synchronized IK/IS or IK/ES policy with ADI,the trajectory of installation kanbans is synchronized with either theplacement (in the case of DAS) or activation (in the case of DBS) oforders, whereas in an independent IK/IS or IK/ES policy with ADI, thetrajectory of installation kanbans is independent of the placement andactivation of orders. In all three types of hybrid policies, the decisionto authorize the placement, authorization or release of an order at eachstage is based on local information, since it depends on the availabilityof installation kanbans. The decision to place an order at each stage, onthe other hand, is based on local information, if the RPP in place is anIS policy with ADI, and on global information, if the RPP in place is anES policy with ADI.
With the above definitions in mind, there are six hybrid IK/IS andIK/ES policies with ADI: (1) synchronized DAS IK/IS policies with ADI,(2) synchronized DBS IK/IS policies with ADI, (3) independent IK/ISpolicies with ADI, (4) synchronized DAS IK/ES policies with ADI, (5)synchronized DBS IK/ES policies with ADI, and (6) independent IK/ES

Multi-Stage Production-Inventory Control Policies 17
policies with ADI. Similarly to [11], however, it can be shown that onlythree of them are distinct, the other three being special cases of thedistinct policies (see [13] for details). The three distinct hybrid policiesare:
A Synchronized DAS IK/IS policies with ADI,
B Synchronized DAS IK/ES policies with ADI,
C Independent IK/ES policies with ADI.
In what follows, we will restrict our attention to these three policiesonly, to which we will henceforth refer as policies A, B and C, respec-tively, for notational simplicity. Queuing network model representationsof a two-stage production-inventory system operating under the threedistinct hybrid polices A, B and C are shown in Figures 1.5, 1.6 and 1.7,respectively. Notice that the model in Figure 1.5 is a combination of themodels in Figures 1.1 and 1.3. Similarly, the models in Figures 1.6 and1.7 are combinations of the models in Figures 1.2 and 1.3.
����
�
�� �� � ����
�� �� ���
� ��
� �� ��
��� ���
��� ����
�������
����� ��
�������
��������
��� ���
��� ���
�������
��������
���������
����
� � �� ���� �� �
����
� � �� ���� �� ����
�
� � �� ���� �� �
����
� � �� ��� � �� �
������� ������� ������� �� ���
Figure 1.5. Queuing network model representation of a two-stage production-inventory system operating under a synchronized DAS IK/IS policy (policy A).
A new element in Figures 1.5 - 1.7, with respect to all previous figures,is the set of queues FKn, which contain free stage-n kanbans. In all threehybrid policies, the total number of installation kanbans at stage n isKi
nQn, where Kin is an integer such that Ki
n ≥ 1, as was the case inIK policies. Initially, a number of these kanbans is attached onto anequal number of parts in the FG output buffer of stage n, defining theinitial installation stock FG inventory position, i0n, and consequently theinitial echelon stock FG inventory position, I0
n, at stage n, for all n. The

18
����
�
�� �� � ����
�� �� ���
� ��
� �� ��
��� �����
��� ����
�������
����� ��
�������
��������
��� ���
���
���
�������
��������
���������
����
� � �� ���� �� �
����
� � �� ���� �� �
����
� � �� ���� �� �
������� ������� �������
����
� � �� ���� �� �
�� ���
Figure 1.6. Queuing network model representation of a two-stage production-inventory system operating under a synchronized DAS IK/ES policy (policy B).
�
����
� � �� ���� �� ����
�
� � �� ���� �� �
��
� � �� ���� �� �
���
�� �� � ���
�� �� �� ��
� ���� � �������
����������
��� �� � ��������
��� ����������
��������
��
��
� � �� ��� � �� �
���������
��� ����
��� ���
������� ������� �������
����
� � �� ���� �� ����
�
� � �� ���� �� �
� � ���
Figure 1.7. Queuing network model representation of a two-stage production-inventory system operating under an independent IK/ES policy (policy C).
remaining installation kanbans, i.e. KinQn − i0n kanbans, are stored in
queue FKn as free installation kanbans, which are available to authorizethe placement or release of an equal number of orders at stage n.
The queuing network representations of the three hybrid policies A, Band C are more complicated than the simple RPPs and kanban policiesdiscussed in Sections 3 and 4, but their complexity varies. Clearly, policy

Multi-Stage Production-Inventory Control Policies 19
C is less complicated than policies A and B. This is because in policyC, the transfer of demands and kanbans is totally uncoupled, whereas inpolicies A and B, it is indirectly coupled. Specifically, in policies A andB the transfer of demands is coupled with the placement of orders andthe placement of orders is coupled with the return of free installationkanbans. This implies that in policies A and B, the communication ofdemands from a stage n to the previous upstream stage n − 1 can beblocked due to the lack of free stage-n kanbans in queue FKn.
Notice that in all three policies, if the demand lead time T is equal tozero, i.e. if there is no ADI, then all the delays Tn are also equal to zeroby (1.3), which means that all the delay circles are redundant and canbe eliminated. In this case, it is not difficult to see that the behaviorof policy B is identical to that of policy C. Even if the demand leadtime T is not equal to zero, however, i.e. if there is ADI, the models ofthe hybrid policies with ADI have the exactly the same structure as themodels of the corresponding hybrid policies without ADI. Specifically,the model of policy A has exactly the same structure as the model of thesynchronized IK/IS policy without ADI, and the models of policies Band C have exactly the same structure as the model of the independentIK/ES policy without ADI, once we view ODn and BDn as a singlequeue. This is an important observation, because it implies that all of theproperties of synchronized IK/IS policies without ADI and independentIK/ES policies without ADI developed in [11] carry over to the casewhere there is ADI. These properties are summarized in the followingsection.
6. Properties of Hybrid Policies A, B and CIn hybrid policy A, the installation stock reorder point at stage n is
defined as rin = (Ri
n − 1)Qn, where Rin is an integer such that 1 ≤ Ri
n ≤Ki
n. We assume that the initial installation stock FG inventory positionssatisfy (Ri
n−1)Qn < i0n ≤ RinQn, for all n. Without loss of generality, we
further assume that i0n = (Rin − 1)Qn + knQn+1, where kn is an integer
such that 1 ≤ kn ≤ jn. This assumption is equivalent to (1.6) andguarantees that the inventory of stage n is at the reorder point exactlywhen ordering. It also guarantees that i0n ≥ Qn+1, which is necessaryin order for the system not to come to a deadlock. Under some fairlynon-restrictive assumptions on the customer demand arrival process, wemay further assume that the initial installation stock positions are equalto their maximum level, i.e. i0n = Ri
nQn . In this case, all the initial SDpositions will be zero. This implies that policy A does not depend onthe initial installations stock positions but only on parameters Ln, Qn,

20
Kin and Ri
n. Policy A can not be nested in the sense that an IS policywith ADI is, except when Ki
n = ∞, for all n, as we will see below.Policy A includes an IK policy and an IS policy with ADI as special
cases. Specifically, policy A with Kin = Ri
n, for all n, is equivalent to anIK policy, i.e. a policy which does not exploit ADI, as was mentioned inSection 4. Policy A with Ki
n = ∞, for all n, is equivalent to an IS policywith ADI (and hence to an MRP system with fixed order quantity),with installation stock reorder points equal to ri
n = (Rin − 1)Qn, and is
therefore nested. Any other policy A with Kin such that Ri
n < Kin < ∞,
for all n, is not nested, imposes an upper bound on the WIP + FGinventory, just as an IK does, and exploits ADI for better replenishmentcontrol, just as an IS does; however, as was mentioned earlier, it doesnot take full advantage of ADI, since the communication of demandsfrom a stage n to the previous upstream stage n−1 may be blocked dueto the lack of free stage-n kanbans in queue FKn.
Policy A is not new. Buzacott and Shanthikumar [5] introduced a sys-tem for coordinating multi-stage production-inventory systems, whichthey called production authorization card (PAC) system. The PAC sys-tem depends on four parameters per stage: the initial installation stockposition, the number of installation kanbans, the order lot size, andthe time delay when placing an order. Buzacott and Shanthikumar [5]demonstrate how through the appropriate choice of parameters the PACsystem can be specialized into a wide variety of classical coordinationapproaches, such as kanban, base stock, etc.
The PAC system is an extended version of one of the first hybrid poli-cies to appear in the literature, called generalized kanban control system(GKCS), which was developed independently by Buzacott [4] and Zipkin[14]. More specifically, the PAC system is a GKCS without lot sizingand ADI. Buzacott [4] divided the GKCS system into two cases. In thefirst case, the number of installation kanbans at each stage is greaterthan or equal to the initial installation stock position. In the secondcase, the number of installation kanbans at each stage is smaller thanthe initial installation stock position. He referred to the first system as abackorderd kanban system and to the second case as a reserve stock kan-ban system. Liberopoulos and Dallery [10] argued that the backorderedkanban system is indeed a new stage coordination policy, whereas the re-serve stock kanban system is a classical IK policy, i.e. a policy that limitsthe WIP + FG inventory at every stage, with an additional constrainton WIP inventory alone. For this reason, they identified the GKCS,and by extension the PAC system, with the backordered kanban systemonly. We will follow the same approach here so that henceforth when werefer to the PAC system we will strictly mean the backordered kanban

Multi-Stage Production-Inventory Control Policies 21
system with lot sizing and ADI. With this in mind, a PAC system isequivalent to policy A, where the queues termed “store,” “requisitiontags,” “process tags” and “order tags” in [5] are equivalent to queuesFGn, BDn, FKn and SDn in Figure 1.5.
A similar analysis can be carried out on hybrid policies B and C.We assume that in both policies B and C, the initial echelon stock FGinventory position at stage n satisfies (Re
n − 1)Qn < I0n ≤ Re
nQn, for alln, where Re
n is an integer such that Qn ≤ RenQn − Re
n+1Qn+1 ≤ KinQn
or jn ≤ RenQjn − Re
n+1 ≤ Kenjn, by (1.1), for n = 1, 2, . . . , N − 1, and
1 ≤ ReN ≤ Ki
N . Unlike policy A, policies B and C generally dependon the initial echelon stock positions, I0
n, as well as on the parametersLn, Qn, Ke
n and Ren. Under certain conditions, both policies may be
nested in the sense that an ES policy with ADI may be nested. Anested synchronized policy B or C, however, can not be replaced by anequivalent policy A, because as was already mentioned above, policy Acan never be nested (except when Ki
n = ∞, for all n).Both policies B and C include IK policies and ES policies with ADI
as special cases. Specifically, a policy B or C with KinQn = Ri
nQn =Re
nQn−Ren+1Qn+1 or Ki
njn = RenQjn−Re
n+1, by (1.1), n = 1, 2, . . . , N−1, and Ki
n = ReN , is equivalent to an IK policy. A policy B or C with
Kin = ∞, for all n, is equivalent to an ES policy with ADI with echelon
stock reorder points equal to ren = (Re
n− 1)Qn. Any other policy B or Cwith Re
nQjn −Ren+1 < Ke
njn < ∞ imposes an upper bound on the WIP+ FG inventory, just as an IK policy does, and exploits ADI for betterreplenishment control, just as an ES policy with ADI does.
The notion of an independent IK/EK policy with ADI is not new.The idea of combining a local-information kanban system and a global-information RPP was introduced by Dallery and Liberopoulos [6]. Theydefined a control system that combines a base stock policy and a kanbanpolicy in the case of unit customer demand, unit lot sizes, and no ADI,and called it extended kanban control system (EKCS). An independentIK/ES policy with ADI is an extension of an EKCS with lot sizing andADI.
7. Evolution Equations of Hybrid Policies A, Band C
Based on our discussions above, there are two limiting cases wherepolicies A, B and C are equivalent to each other. In the first limitingcase, all three policies are equivalent to an IK policy. In the second lim-iting case, policy A is equivalent to an IS policy with ADI, and policiesB and C are equivalent to an ES policy with ADI, where, as was men-

22
tioned in Section 3, an ES policy with ADI can always be replaced byan IS policy with ADI. In any other case, policies A, B and C are neverequivalent to each other. This means that if we take an IS policy withADI and an equivalent nested ES policy with ADI, superimpose on eachpolicy the same IK policy and synchronize the trajectory of installationkanbans with the placement of orders (in policies A and B) or the re-lease of orders (in policy C), the resulting policies A, B and C will notbe equivalent to each other. Although this remains to be seen, it wouldnot be surprising if in many cases, policy C turned out to outperformthe other two policies, because (1) policy C, like policy B, uses globalinformation, whereas policy A uses local information, and (2) policyC totally uncouples the transfer of demands and kanbans, eliminatingthe possibility of blocking of demands due to the lack of free kanbans,whereas policies A and B indirectly couple the transfer of demands withthe trajectory of kanbans. Moreover, as we observed earlier, policy Chas the added advantage that it is less complicated than policies A andB.
The dynamics of the three hybrid policies can be described in exactmathematical terms by recursive evolution equations that utilize theoperators “+” and “max” only. These equations relate the timing of aparticular event in a policy to the timings of events that must precedeit. To elaborate, let the timings of different events be defined as follows:
D(n−1,n),i The time that the ith part is released from stage n − 1 tostage n,
D∗(n−1,n),i The time that the ith order is placed from stage n to stage
n− 1,
Dn,i The time that the ith part completes processing in WIPn and isstored in FGn,
Dd,i The time that the ith demand arrives to the system.
Now, suppose that WIPn consists of a single machine, and let σn,i bethe processing time of the ith part at the machine in WIPn. Followingthe methodology in [6], we can develop recursive evolution equationsrelating the timings of different events in the system (for details, see[13]). Specifically, the time that the ith part completes processing inWIPn and is stored in FGn is given by
Dn,i = σn,i + max(D(n−1,n),i, Dn,i−1
), (1.7)

Multi-Stage Production-Inventory Control Policies 23
for all three policies A, B and C. The time that the ith order is placedfrom stage n to stage n− 1 is given by
D(n−1,n),i = max(
Dn−1,
⌈i
Qn
⌉Qn−Rn−1
, Tn + D∗(n−1,n),i
), (1.8)
for policy A,
D(n−1,n),i = max(
Dn−1,
⌈i
Qn
⌉Qn−Rn−1
, Tn+
max(
D∗(n−1,n),
⌈i
Qn
⌉Qn
, D(n,n+1),
⌈i
Qn
⌉Qn−(Kn−Rn)
)), (1.9)
for policy B and
D(n−1,n),i = max(
Dn−1,
⌈i
Qn
⌉Qn−Rn−1
, Tn+
D∗(n−1,n),
⌈i
Qn
⌉Qn
, D(n,n+1),
⌈i
Qn
⌉Qn−(Kn−Rn)
), (1.10)
for policy C. Finally, the time that the ith order is placed from stage nto stage n− 1 is given by
D∗(n−1,n),i = max
(D∗
(n,n+1),⌈
iQn
⌉Qn
, D(n,n+1),
⌈i
Qn
⌉Qn−(Kn−Rn−1)
),
(1.11)for policy A and
D∗(n−1,n),i = Dd,i, (1.12)
for policies B and C.Equation (1.7) holds for n = 1, 2, . . . , N , whereas equations (1.8) -
(1.12) hold for n = 2, 3, . . . , N . The symbolism di/Qne has to do withthe batching of parts and demands, where dxe denotes the integer partof x + 1. Notice from (1.11) and (1.12), that for policy A, D∗
(n−1,n),i isgiven by a recursive expression, whereas for policies B and C, it is simplyequal to Dd,i.
Expanding the recursive equations (1.7) - (1.12) backwards, staringfrom n = N + 1, and using the conventions D·,i = −∞, for i ≤ 0 andD(N+1,N+2),· = −∞, yields the following compact-form expression forD(n−1,n),i (for details see [13]):
D(n−1,n),i =N
maxj−1
(j∑
m=n
Tm + Dj,
⌈i
Qn
⌉Qn−Rj−
∑jm=n(Km−Rm)
,
j∑m=n
Tm + Tj+1 + Dd,
⌈i
Qn
⌉Qn−
∑jm=n(Km−Rm)
), (1.13)

24
for policy B and
D(n−1,n),i =N
maxj−1
(D
j,⌈
iQn
⌉Qn−Rj−
∑jm=n(Km−Rm)
,
Tj+1 + Dd,
⌈i
Qn
⌉Qn−
∑jm=n(Km−Rm)
), (1.14)
for policy C. Unfortunately, no compact-form expression for D(n−1,n),i
can be obtained for policy A, because of the complicated recursive formof D∗
(n−1,n),i given by (1.11).The evolution equations developed above can be used to verify some
of the properties of the three hybrid policies mentioned earlier and deriveother properties as well. For example, we can verify that if Ki
n = ∞, forall n, the evolution equations of the three policies A, B and C are equalto the evolution equation of an IS or an equivalent ES policy with ADI,which is given by
D(n−1,n),i = max(
Dn−1,
⌈i
Qn
⌉Qn−Rn−1
, Tn + D∗d,
⌈i
Qn
⌉Qn
), (1.15)
for n = 2, 3, . . . , N + 1. Similarly, we can verify that if Kin = Ri
n, for alln, the evolution equations of the three policies A, B and C are equal tothe evolution equation of an IK policy, which is given by
D(n−1,n),i = max(
Nmax
j=n−1
(D
j,⌈
iQn
⌉Qn−Kj
), D∗
d,⌈
iQn
⌉Qn
), (1.16)
for n = 2, 3, . . . , N + 1.Finally, by comparing the expressions for D(n−1,n),i for policies B and
C from (1.13) and (1.14), respectively, we can easily see that DC(n−1,n),i ≤
DB(n−1,n),i, where the superscript indicates the policy. This implies that
policy C responds to the demand at least as fast as policy B.
8. ConclusionsWe expanded the framework for modelling multi-stage production-
inventory policies with lot sizing developed in [11] to include policiesthat deal with ADI. Using this framework, we presented classical IS andES policies with ADI and IK and EK policies. We defined three dis-tinct hybrid policies, called A, B and C, that combine an IK and anIS or an ES policy with ADI. Policy A is equivalent to the PAC sys-tem introduced by Buzacott and Shanthikumar [5], and policy C is anextension of the EKCS policy introduced by Dallery and Liberopoulos

REFERENCES 25
[6] that includes lot sizing and ADI. Policy C is a new policy which de-serves further studying, because it appears to be simpler than the othertwo policies. Also, the present modelling framework could be furtherexpanded to include production-inventory control policies for non-serialsystems, such as assembly/disassembly networks of stages, and systemswith multiple products. Finally, numerical studies need to be performedto compare the performance of different policies. This could be done us-ing simulation or by developing and implementing decomposition-basedmethods for the performance evaluation of the policies as in [7].
AcknowledgmentsThe authors would like to thank John A. Buzacott for inspiring the
work in this chapter.
References
[1] Axsater, S. and Rosling, K., Installation vs. ES Policies forMultilevel Inventory Control. Management Science, 39 (1993),1274-1280.
[2] Axsater, S. and Rosling, K., Multilevel Production-InventoryControl: Material Requirements Planning or Reorder Point Policies?European Journal of Operations Research, 75 (1994), 405-412.
[3] Axsater, S. and Rosling, K., Ranking of Generalized Multi-Stage Kanban Policies. European Journal of Operations Research,113 (1999), 560-567.
[4] Buzacott, J.A., Queuing Models of Kanban and MRP ControlledProduction Systems. Engineering Costs and Production Economics,17 (1989), 3-20.
[5] Buzacott, J.A. and Shanthikumar, J.G., Stochastic Models ofManufacturing Systems, Prentice-Hall, Englewood Cliffs, NJ, 1993.
[6] Dallery, Y. and Liberopoulos, G., Extended Kanban ControlSystem: Combining Kanban and Base Stock. IIE Transactions, 322000, 369-386.
[7] Duri, C., Frein, Y. and Di Mascolo, M., Comparison AmongThree Pull Control Policies: Kanban, Base Stock and GeneralizedKanban. Annals of Operations Research, 93 2000, 41-69.
[8] Karaesmen, F., Buzacott, J.A. and Dallery, Y., Integrat-ing Advance Order Information in Production Control. IIE Trans-actions, 34 2002, 649-662.

26
[9] Karaesmen, F., Liberopoulos, G. and Dallery, Y., Pro-duction/Inventory Control with Advance Demand Information. In:Stochastic Modelling and Optimization of Manufacturing Systemsand Supply Chains, D.D. Yao and W.H.M. Zijm (eds.), InternationalSeries in Operations Research and Management Science, KluwerAcademic Publishers, 2003.
[10] Liberopoulos, G. and Dallery, Y., A Unified Framework forPull Control Mechanisms in Multi-Stage Manufacturing Systems.Annals of Operations Research, 93 2000, 325-355.
[11] Liberopoulos, G. and Dallery, Y., Comparative Modelling ofMulti-Stage Production-Inventory Policies with Lot Sizing. Inter-national Journal of Production Research, 2003, to appear.
[12] Spearman, M.L., Woodruff, D.L. and Hopp, W.J., CON-WIP: A Pull Alternative to Kanban. International Journal of Pro-duction Research, 28 1993, 879-894.
[13] Tsikis, I., Comparative Modelling of Multi-Stage Production-Inventory Policies with Lot Sizing and Advance Demand Infor-mation, Postgraduate Specialization Diploma (M.Sc.) Dissertation,Department of Mechanical and Industrial Engineering, Universityof Thessaly, Greece, 2003.
[14] Zipkin , P.H., A Kanban-Like Production Control System: Analy-sis of Simple Models, Research Working Paper No. 89-1, GraduateSchool of Business, Columbia University, New York, USA, 1989.
9. Appendix: Notations and AbbreviationsADI advance demand information
RPP reorder point policy
WIP work in process
FG finished goods
BD backordered demands (demands activated but not yet released)
OD outstanding demands (demands placed but not yet activated)
SD single demands (demands not yet placed but waiting for other de-mands to complete a lot)
FK free kanbans
IS installation stock

REFERENCES 27
ES echelon stock
IK installation kanban
EK echelon kanban
DBS delay before synchronization
DAS delay after synchronization
Policy A hybrid synchronized DAS IK/IS policy
Policy B hybrid synchronized DAS IK/ES policy
Policy C hybrid independent IK/ES policy