Embed Size (px)
Citation preview
UNIVERZA V LJUBLJANI
BIOTEHNIŠKA FAKULTETA
ODDELEK ZA AGRONOMIJO
BERNIK RAJKO
TEHNIKA V KMETIJSTVU
UVOD V STROJNIŠTVO - VAJE
LJUBLJANA 1996
2
----------------------------------------------------------------------------------------------------------------- Strokovna ocena: Igor Janežič in Lučka Kajfež Bogataj Risanje: Dragica Bitenc Oblikovanje: Janko Rebernik in Tone Godeša Lektoriranje: Tomaž Švagelj Izdal: Oddelek za agronomijo Biotehniške fakultete v Ljubljani, Jamnikarjeva 101 Tisk: Planprint d.o.o., Ljubljana Naklada: 300 izvodov Po mnenju Ministrstva za šolstvo in šport št. 415-8/96, z dne 28. 5. 1996, šteje publikacija med proizvode, za katere se plačuje petodstotni davek od prometa proizvodov. Vse pravice pridržane. Reproduciranje in razmnoževanje dela po zakonu o avtorski pravici ni dovoljeno. Copyright © Rajko Bernik, 1996
KAZALO
3
1 MERSKE ENOTE.....................................................................................................5
1.1 Osnovne enote SI..............................................................................................................................................5
1.2 Izpeljane enote SI .............................................................................................................................................7
2 MEHANIKA ............................................................................................................10
2.1 Statika togega telesa.......................................................................................................................................10 Grafično predstavljanje sile...............................................................................................................................10 Moment dvojice sil............................................................................................................................................14 Ravnotežje sil v ravnini.....................................................................................................................................15
2.2 Dinamika.........................................................................................................................................................20 Kinematika ........................................................................................................................................................20 Enakomerno gibanje..........................................................................................................................................20 Enakomerno pospešeno gibanje ........................................................................................................................20
2.3 Kinetika...........................................................................................................................................................24 Osnovne enačbe iz dinamike.............................................................................................................................28
2.4 Hidromehanika ..............................................................................................................................................29
3 GRADIVA ...............................................................................................................32 Toplotna obdelava jekla ....................................................................................................................................36
4 STROJNI ELEMENTI .............................................................................................38
4.1 Razstavljive zveze...........................................................................................................................................38 Vijačne zveze ....................................................................................................................................................38 Računski zgledi računanja vijačnih zvez...........................................................................................................39 Mozniki .............................................................................................................................................................41 Zagozde .............................................................................................................................................................42 Sorniki ...............................................................................................................................................................43 Zatiči .................................................................................................................................................................44 Vzmeti ...............................................................................................................................................................45 Osi .....................................................................................................................................................................47
4.2 Nerazstavljive zveze .......................................................................................................................................49 Zvari ..................................................................................................................................................................49 Lotani spoji........................................................................................................................................................50 Zveze s kovicami...............................................................................................................................................51
5 TRDNOST ..............................................................................................................52
5.1 Mehanske lastnosti in obremenitve materialov...........................................................................................52 Značilnosti loma strojnih elementov .................................................................................................................53 Primeri podajanj napetosti za kovinske materiale .............................................................................................53 Zgledi izračunov s področja trdnosti .................................................................................................................55
6 STROJNI DELI ZA PRENOS VRTILNIH GIBANJ .................................................59 Zobniški prenos.................................................................................................................................................60
4
Polžasti prenos ..................................................................................................................................................62 Jermenski prenos ...............................................................................................................................................63 Planetni prenosniki............................................................................................................................................64
7 ZGLEDI IZ MEHANIKE NA POENOSTAVLJENIH PRIMERIH IZRAČUNAVANJA65 Prestavno razmerje in prenos pri mehanskih prenosnikih vrtilnih gibanj .........................................................67 Gredi..................................................................................................................................................................71 Trenje ................................................................................................................................................................72
8 OLJNA HIDRAVLIKA ............................................................................................74
5
1 MERSKE ENOTE
1.1 Osnovne enote SI
Osnovna enota za dolžino je meter (m).Enota je bila prvotno določena z razdaljo dveh črt na mednarodnem prametru iz platine in iridija pri temperaturi 0 °C. Prameter je bil določen z meritvami Zemljinega kvadranta kot njegova desetmilijoninka, pri poznejših meritvah pa so ugotovili neznatne odstopke od te definicije (prekratek je za 0,2 mm). Enajsta generalna konferenca za mere in uteži je leta 1960 v Parizu določila novo definicijo za meter, po kateri je to dolžina, enaka 1650763,73 valovne dolžine sevanja kriptona 86Kr. Osnovna enota za maso je kilogram (kg), ki je določena z maso mednarodnega prakilograma iz platine in iridija. Prakilogram je bil prvotno določen z maso enega kubičnega decimetra destilirane vode pri temperaturi 4 °C in tlaku 1,01325 bara. S poznejšimi meritvami pa so ugotovili odstopek tudi pri izdelavi prakilograma, ki pri 4 °C dejansko ustreza masi 1,000028 dm3 vode. Osnovna enota za čas je sekunda (s), ki je bila prvotno določena kot 1/86400 srednjega sončnega dneva. Trinajsta generalna konferenca za mere in uteži je leta 1967 v Parizu določila tudi novo definicijo za sekundo, in sicer kot trajanje 9192631770 period sevanja cezija 133 Cs. Osnovna enota električnega toka je amper (A). En amper je enosmerni električni tok, ki pri pretakanju v vakuumu skozi dva ravna in medsebojno en meter oddaljena vzporedna vodnika z neskončno dolžino in zanemarljivo majhnim prerezom povzroča med vodnikoma na vsakem tekočem metru dolžine silo 2 .10-7 N. Osnovna enota za (termodinamično) temperaturo je kelvin (K). To je 1/273,16 temperaturne razlike med absolutno ničlo in trojno točko vode. Osnovna enota za svetilnost je kandela (cd). Ena kandela je svetilnost enovalovnega sevanja s frekvenco 540 .10 12 Hz in močjo 1/683 W/sr. Enota za količino snovi je mol (mol). To je količina snovi sistema, ki vsebuje toliko elementarnih delcev, kolikor atomov je v 12 g ogljika 12C. Število delcev v molu določa Avogardova konstanta (NA = 6,02205.10 23 mol-1).

6
Tabela Napaka! Neznan argument stikala.: Osnovne enote
Veličina Oznaka Enote
ime znak Zveza z veljavnimi enotami
Zveza z neveljavnimi enotami
Opombe
dolžina l, s meter, m morska milja 1 sm = 1852 m, dovoljena le v pomorskem in zračnem prometu
palec, cola, inch 1" = 0,025 m čevelj, foot, 1 ft = 0,3048 m jard, yard 1 yd = 0,9144 m milja 1 mile = 1609 m
Enota cola se še vedno uporablja pri cevnih instalacijah.
masa m kilogram, kg tona 1 t = 1000 kg 1 dct = 100 kg
unča, ounce 1oz = 28,349 g funt, pound 1 lb = 453,592 g
čas t sekunda, s minuta 1 min = 60 s ura 1 h = 60 min dan 1 d = 24 h leto 1 a = 365 d
1 a = 360 d, v bančništvu
jakost el. toka
I amper, A
termodin. temperatura
T kelvin, K 0 K = - 273 °C 0 °C = 273 K
1 °F = 1,8 ∗ °C +32
količina snovi
n mol, mol
svetlobna jakost
I candela, cd Hefnerjeva sveča 1 HK = 0,903 cd mednarodna sveča 1 IC = 1,019 cd
površina, prerez
A , S kvadratni meter, m2
hektar ha = 10000 m2 ar 1 a = 100 m2
prostornina, volumen
V kubični meter, m3
liter 1 l = 1 dm3
1 UKgal = 4,54 dm3 1 USgal = 3,78 dm3 registrska tona 1 RT = 2,832 m3
7
1.2 Izpeljane enote SI
Iz osnovnih enot mednarodnega sistema enot SI so izpeljane dimenzijsko soodvisne enote geometričnih in časovnih veličin: za ploščino - m2 za pospešek - m/s2
za prostornino - m3 za kotno hitrost - 1/s za hitrost - m/s za kotni pospešek - 1/s2
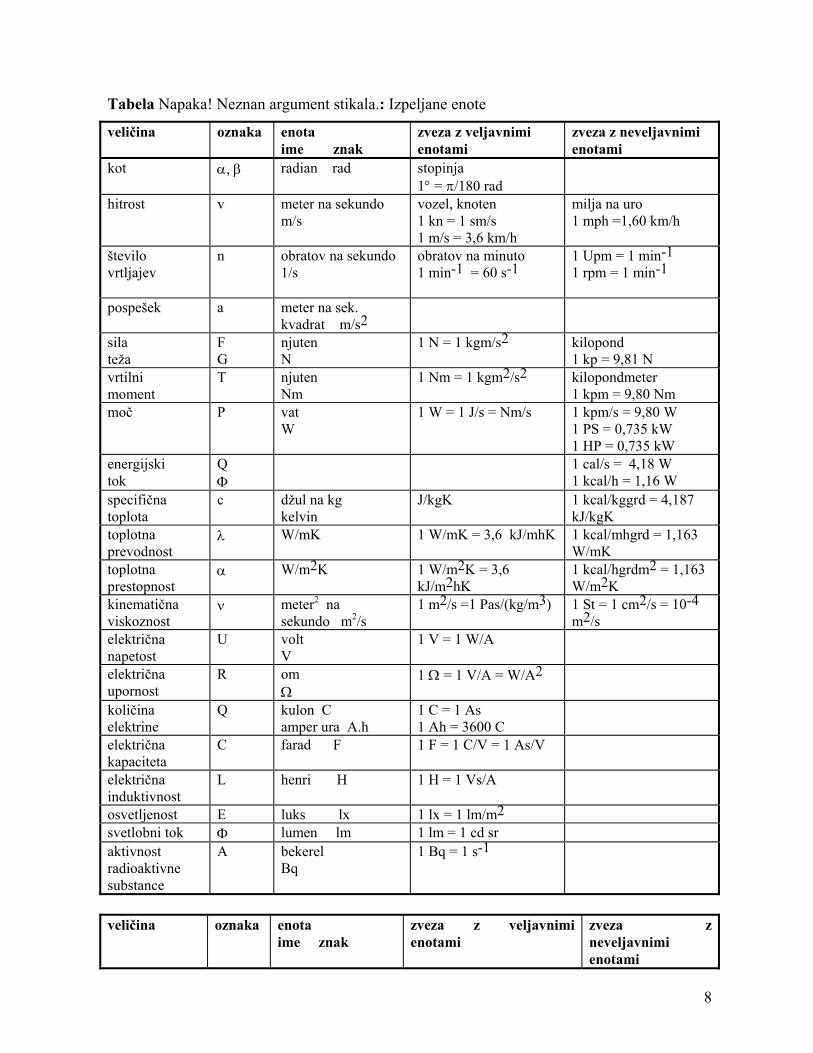
Enota za silo izhaja iz Newtonowega zakona F = m · a, iz katerega izvira dimenzijsko soodvisna enota za silo: kg m/s2 = N Enota sile, imenovana njuten (N, newton) je tista sila, ki daje masi 1 kg pospešek 1 m/s2. Iz enačbe za delo W = F . s izhaja dimenzijsko sovisna enota za delo Nm = J Enota za energije (delo) se imenuje džul (J, joule) in je delo sile 1 N na poti 1 m. Enačba za moč P = W/t daje dimenzijsko sovisno enoto: J/s = W Enota za moč je vat (W, watt), ki je delo 1 J, opravljeno v času 1 s. Na te glavne dimenzijsko sovisne enote mednarodnega sestava enot SI so neprekinjeno navezane enote električnih in magnetičnih veličin. Iz zakona o moči (P) enosmernega električnega toka, P = U · I, izhaja dimenzijsko sovisna enota za napetost W/A = V. Imenujemo jo volt (V) in je potencialna razlika med dvema točkama vodnika, ki vodi enosmerni tok 1A, če se med tema točkama porablja moč 1W. Iz Ohmovega zakona, po katerem je napetost (U) enaka zmnožku toka (I) in električne uporno osti R (U = I R), izhaja dimenzijsko sovisna enota za električno upornost V/A = Ω. Enoto imenujemo om ( Ω, ohm), in je upornost med dvema točkama vodnika, med katerima pri napetosti 1V teče enosmerni tok 1A. Podobno so izpeljane še nadaljnje sovisne enote SI.
8
Tabela Napaka! Neznan argument stikala.: Izpeljane enote
veličina oznaka enota ime znak
zveza z veljavnimi enotami
zveza z neveljavnimi enotami
kot α, β radian rad stopinja 1° = π/180 rad
hitrost v meter na sekundo m/s
vozel, knoten 1 kn = 1 sm/s 1 m/s = 3,6 km/h
milja na uro 1 mph =1,60 km/h
število vrtljajev
n obratov na sekundo 1/s
obratov na minuto 1 min-1 = 60 s-1
1 Upm = 1 min-1 1 rpm = 1 min-1
pospešek a meter na sek. kvadrat m/s2
sila teža
F G
njuten N
1 N = 1 kgm/s2 kilopond 1 kp = 9,81 N
vrtilni moment
T njuten Nm
1 Nm = 1 kgm2/s2 kilopondmeter 1 kpm = 9,80 Nm
moč P vat W
1 W = 1 J/s = Nm/s 1 kpm/s = 9,80 W 1 PS = 0,735 kW 1 HP = 0,735 kW
energijski tok
Q Φ
1 cal/s = 4,18 W 1 kcal/h = 1,16 W
specifična toplota
c džul na kg kelvin
J/kgK 1 kcal/kggrd = 4,187 kJ/kgK
toplotna prevodnost
λ W/mK 1 W/mK = 3,6 kJ/mhK 1 kcal/mhgrd = 1,163 W/mK
toplotna prestopnost
α W/m2K 1 W/m2K = 3,6 kJ/m2hK
1 kcal/hgrdm2 = 1,163 W/m2K
kinematična viskoznost
ν meter2 na sekundo m2/s
1 m2/s =1 Pas/(kg/m3) 1 St = 1 cm2/s = 10-4 m2/s
električna napetost
U volt V
1 V = 1 W/A
električna upornost
R om Ω
1 Ω = 1 V/A = W/A2
količina elektrine
Q kulon C amper ura A.h
1 C = 1 As 1 Ah = 3600 C
električna kapaciteta
C farad F 1 F = 1 C/V = 1 As/V
električna induktivnost
L henri H 1 H = 1 Vs/A
osvetljenost E luks lx 1 lx = 1 lm/m2 svetlobni tok Φ lumen lm 1 lm = 1 cd sr aktivnost radioaktivne substance
A bekerel Bq
1 Bq = 1 s-1
veličina oznaka enota
ime znak zveza z veljavnimi enotami
zveza z neveljavnimi enotami

9
energijska doza sevanja
J C/kg 1 C/kg = 1 As/s rentgen 1 R = 258.10-6 C/kg
tlak p paskal Pa 1 N/m2 mehanska napetost normalna
σ
njuten na meter2 N/m2
1 N/m2 = 1 Pa 1 N/mm2 = 1 MPA
1 kp/mm2 = 9,80 N/mm2 1 kp/cm2 = 0,0980 N/mm2
tangencialna τ energija E džul J 1 J = 1 Nm = Ws = 1
kgm2/s2 1 kp = 9,806 J 1 PSh = 0,735 kWh
delo W vatsekunda Ws
kilovatna ura 1 kWh = 3,6 MJ
kilokalorija 1 kcal = 4,186 kJ
toplota Q 1 cal = 4,186 J
Tabela Napaka! Neznan argument stikala.: Preračunavanje enot tlaka in napetosti
enota Pa hPa bar N/mm2 kp/mm2
at atm Torr psi psf
Pa 1 10-2 10-5 10-6 - - - 0,0075 - - hPa 100 1 10-3 10-4 - - - 0,750 0,014 2,08 bar 105 1000 1 0,1 0,012 1,019 0,986 750,0 14,50 2088,6 N/mm2 106 104 10 1 0,101 10,1 9,86 7501 145,0 20886 kp/mm2 - 9806 98,06 9,806 1 100 96,78 73556 1422 - at 98066 980,6 0,980 0,0981 0,01 1 0,967 735,5 14,22 2048 atm 101325 1013 1,013 - - 1,033 1 760 14,69 2116 Torr 133,3 1,333 - - - 0,0013 0,0013 1 0,0193 2,784 psi 6894,7 68,94 0,068 0,00689 - 0,0703 0,068 51,751 1 144 psf 47,88 0,478 - - - - - 0,359 - 1 1 Pa = 1 N/m2 ; 1 hPa = 1 mbar; 1 at = 1 kp/cm2; 1 Torr = 1 mmHg
Tabela Napaka! Neznan argument stikala.: Preračunavanje energijskih enot
enota J kWh kpm PSh kcal J 1 277,8 .10-9 0,10197 377,6 .10-9 238,85 .10-6 kWh 3,6 .106 1 367098 1,359 859,8 kpm 9,8066 2,724 1 3,704 .10-6 2,342 .10-3 PSh 2,647 .106 0,7354 270000 1 632,36 kcal 4186,8 1,163 .10-3 426,93 1,581 .10-3 1
10
2 MEHANIKA
2.1 Statika togega telesa
Sila je usmerjena veličina ali vektor. Vektor sile označujemo z vF, njegovo absolutno
vrednost pa vF F= . Za popolno določitev sile kot vektorja so potrebni trije podatki:
1. prijemališče sile (točka A na površini ali v notranjosti telesa). 2. smernica, ki nosi vektor 3. absolutna vrednost sile
Grafično predstavljanje sile
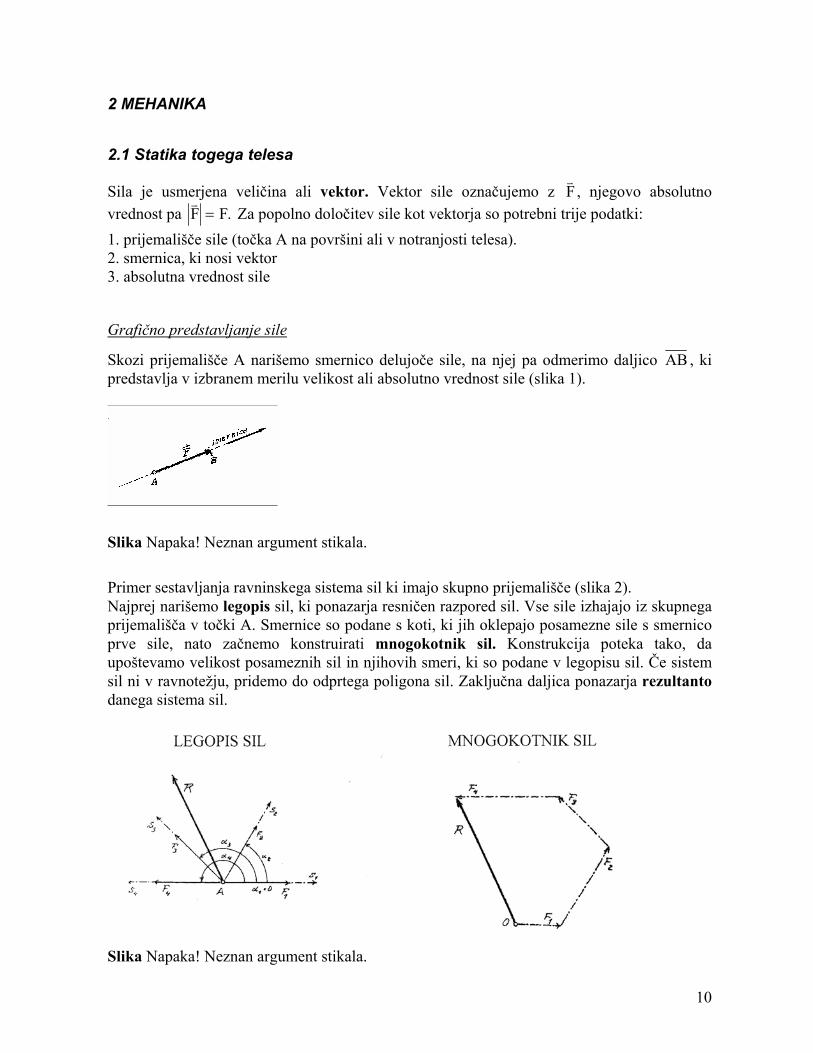
Skozi prijemališče A narišemo smernico delujoče sile, na njej pa odmerimo daljico AB , ki predstavlja v izbranem merilu velikost ali absolutno vrednost sile (slika 1).
Slika Napaka! Neznan argument stikala.
Primer sestavljanja ravninskega sistema sil ki imajo skupno prijemališče (slika 2). Najprej narišemo legopis sil, ki ponazarja resničen razpored sil. Vse sile izhajajo iz skupnega prijemališča v točki A. Smernice so podane s koti, ki jih oklepajo posamezne sile s smernico prve sile, nato začnemo konstruirati mnogokotnik sil. Konstrukcija poteka tako, da upoštevamo velikost posameznih sil in njihovih smeri, ki so podane v legopisu sil. Če sistem sil ni v ravnotežju, pridemo do odprtega poligona sil. Zaključna daljica ponazarja rezultanto danega sistema sil.
Slika Napaka! Neznan argument stikala.
11
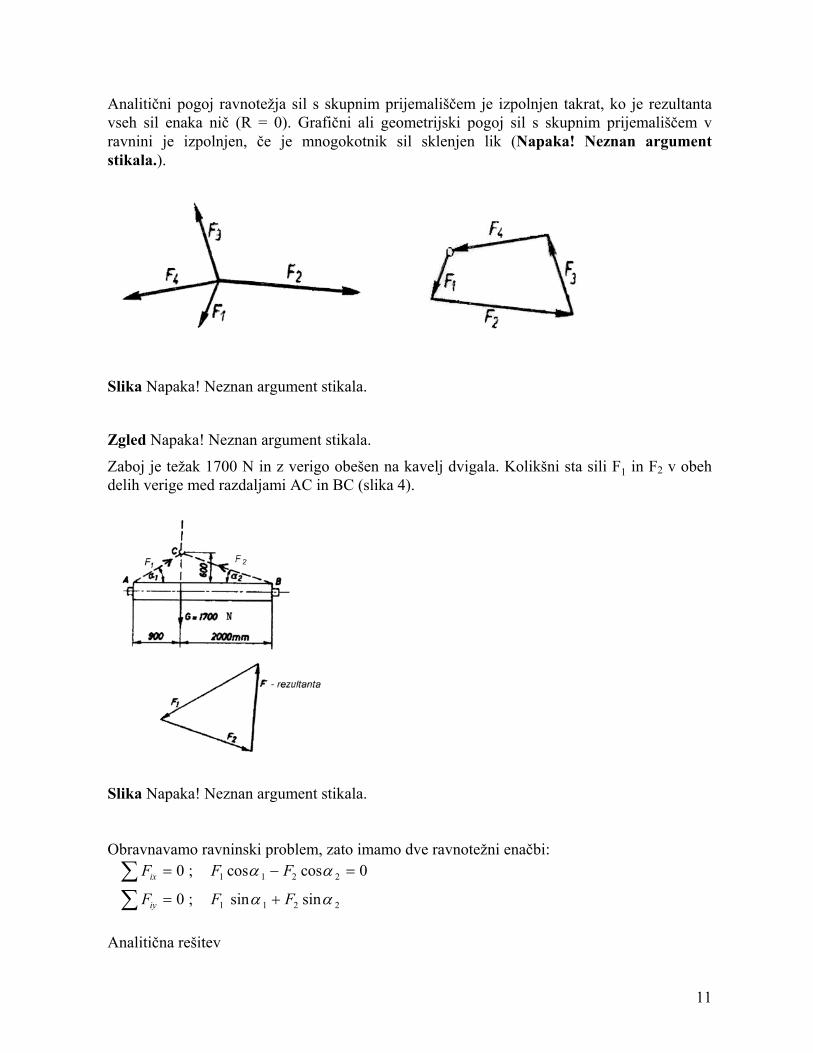
Analitični pogoj ravnotežja sil s skupnim prijemališčem je izpolnjen takrat, ko je rezultanta vseh sil enaka nič (R = 0). Grafični ali geometrijski pogoj sil s skupnim prijemališčem v ravnini je izpolnjen, če je mnogokotnik sil sklenjen lik (Napaka! Neznan argument stikala.).
Slika Napaka! Neznan argument stikala.
Zgled Napaka! Neznan argument stikala.
Zaboj je težak 1700 N in z verigo obešen na kavelj dvigala. Kolikšni sta sili F1 in F2 v obeh delih verige med razdaljami AC in BC (slika 4).
Slika Napaka! Neznan argument stikala. Obravnavamo ravninski problem, zato imamo dve ravnotežni enačbi:
F F F
F F Fix
iy
= − =
= +
∑∑
0 0
01 2 2
1 2 2
;
; 1
1
cos cos
sin sin
α α
α α
Analitična rešitev

12
Naklonska kota izračunamo iz slike
tg 1 '
'
α α
α α
= = ⇒ =
= = ⇒ =
600900
0 667 33 40
6002000
0 3 16 40
1
2 2
,
,
o
otg
Rešitev zgornjih dveh enačb je F F1 2= =2120 N 1840 N Grafična rešitev Ker poznamo smer in velikost rezultante F, jo narišemo najprej. Nato od končne točke rezultante narišemo smer (premico) sile F1 pod enakim kotom, kot je kot verige A-C proti rezultanti F oziroma sili G, od začetne točke razultante pa smer sile F2. Sile narišemo v merilu, na primer 1 cm = 500 N. Presečišče obeh premic določa dolžini oziroma, z upoštevanjem merila, sili F1 in F2.
Zgled Napaka! Neznan argument stikala.
En konec vrvi je pritrjen v točki A, na drugem koncu, ki je speljan preko koluta C pa visi breme Q = 200 N. V točki B je kavelj, ki nosi vertikalno obremenitev G (slika 5). Določite velikost obremenitve G in silo S v vrvi na odseku AB, če je to ravnotežno stanje.
Slika Napaka! Neznan argument stikala. Nalogo rešimo z uporabo ravnotežnih enačb
F Q S
Q S GS G
ix∑∑
= − =
= + − =
=
0 45 0
0 45 0
; cos30
F ; sin30245 N = 273 N
iy
o o
o o
cos
sin
Za razstavljanje znane sile R (Napaka! Neznan argument stikala.) na več komponent moramo poznati njihove smeri, v našem primeru tri smernice f1, f2 in f3. Grafično razstavljanje sil temelji na aksiomu o paralelogramu sil, gre pa za obraten postopek kot sestavljanje sil.
13
Slika Napaka! Neznan argument stikala.
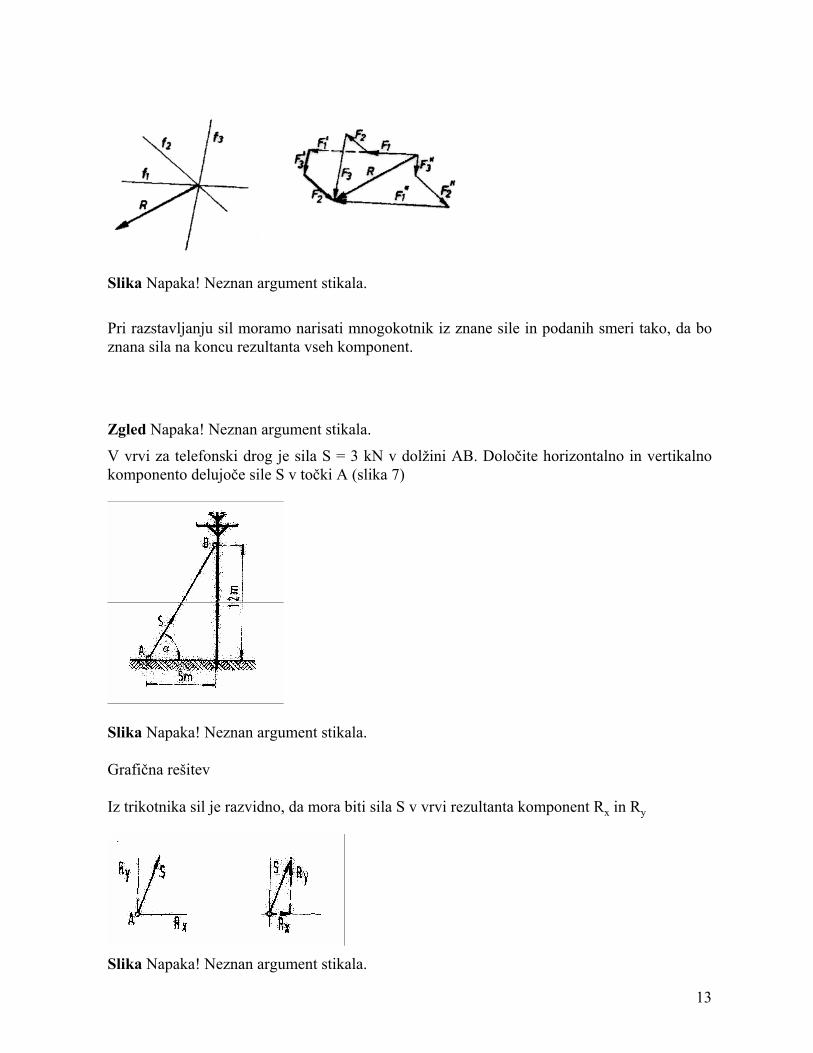
Pri razstavljanju sil moramo narisati mnogokotnik iz znane sile in podanih smeri tako, da bo znana sila na koncu rezultanta vseh komponent.
Zgled Napaka! Neznan argument stikala.
V vrvi za telefonski drog je sila S = 3 kN v dolžini AB. Določite horizontalno in vertikalno komponento delujoče sile S v točki A (slika 7)
Slika Napaka! Neznan argument stikala. Grafična rešitev Iz trikotnika sil je razvidno, da mora biti sila S v vrvi rezultanta komponent Rx in Ry
Slika Napaka! Neznan argument stikala.

14
Izračun kota α
tg = 125
1,15 kN2,77 kN
α α
α
α
= → =
= = ⋅ =
= = ⋅ =
2 4 67 4
3 67 43 67 4
, ,
cos cos ,sin sin ,
o
o
o
R SR S
x
y
Za prikaz momenta sile lahko uporabimo vektorski račun. v v vM rxF= Moment sile je vektorska veličina, ki je rezultat vektorskega produkta krajevnega vektorja prijemališča sile vr in sile
vF . Smer momenta je normala na ravnino, ki jo tvorita vektorja vr in
vF. Velikost momenta (absolutna vrednost vektorja) je enaka ploščini paralelograma, ki jo tvorita vektorja vr in
vF.
v v vM r F= ⋅ ⋅ sinα
kjer je α kot med vektorjema vr in
vF.
Slika Napaka! Neznan argument stikala.
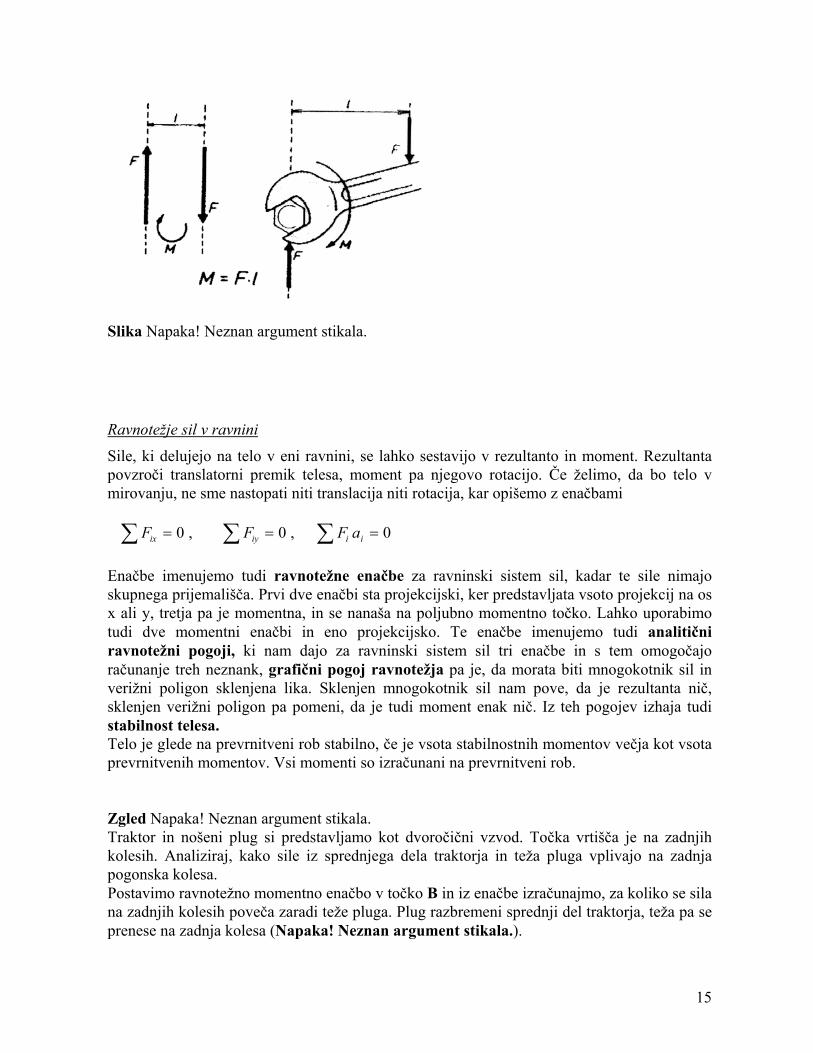
Moment dvojice sil
Sili, ki sta enako veliki, vzporedni in nasprotno usmerjeni, ter ne ležita na isti smernici, imenujemo dvojico sil (slika 10). Moment dvojice sil je enak produktu sile in razdalje l med silama. Dvojica sil se v isti ali vzporedni ravnini lahko poljubno premešča ali zamenjuje z drugo dvojico sil, ki ima enak moment.
15
Slika Napaka! Neznan argument stikala.
Ravnotežje sil v ravnini
Sile, ki delujejo na telo v eni ravnini, se lahko sestavijo v rezultanto in moment. Rezultanta povzroči translatorni premik telesa, moment pa njegovo rotacijo. Če želimo, da bo telo v mirovanju, ne sme nastopati niti translacija niti rotacija, kar opišemo z enačbami
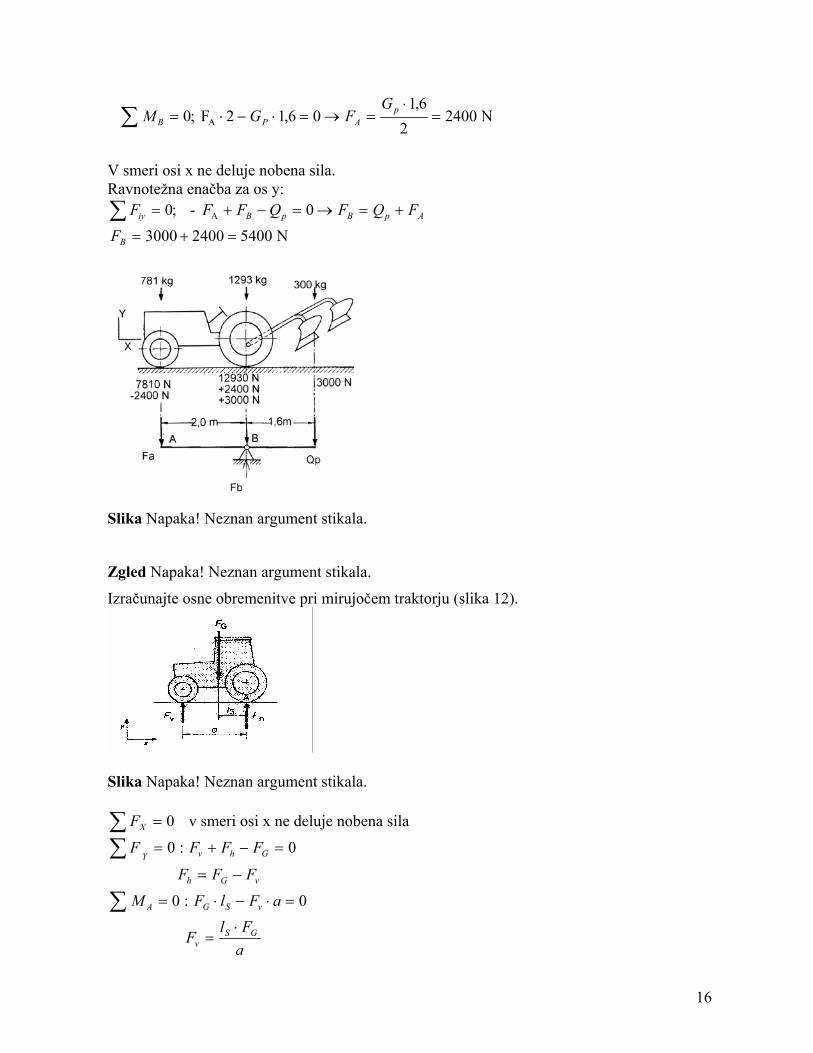
F F F aix iy i i∑ ∑ ∑= = =0 0 0 , , Enačbe imenujemo tudi ravnotežne enačbe za ravninski sistem sil, kadar te sile nimajo skupnega prijemališča. Prvi dve enačbi sta projekcijski, ker predstavljata vsoto projekcij na os x ali y, tretja pa je momentna, in se nanaša na poljubno momentno točko. Lahko uporabimo tudi dve momentni enačbi in eno projekcijsko. Te enačbe imenujemo tudi analitični ravnotežni pogoji, ki nam dajo za ravninski sistem sil tri enačbe in s tem omogočajo računanje treh neznank, grafični pogoj ravnotežja pa je, da morata biti mnogokotnik sil in verižni poligon sklenjena lika. Sklenjen mnogokotnik sil nam pove, da je rezultanta nič, sklenjen verižni poligon pa pomeni, da je tudi moment enak nič. Iz teh pogojev izhaja tudi stabilnost telesa. Telo je glede na prevrnitveni rob stabilno, če je vsota stabilnostnih momentov večja kot vsota prevrnitvenih momentov. Vsi momenti so izračunani na prevrnitveni rob. Zgled Napaka! Neznan argument stikala. Traktor in nošeni plug si predstavljamo kot dvoročični vzvod. Točka vrtišča je na zadnjih kolesih. Analiziraj, kako sile iz sprednjega dela traktorja in teža pluga vplivajo na zadnja pogonska kolesa. Postavimo ravnotežno momentno enačbo v točko B in iz enačbe izračunajmo, za koliko se sila na zadnjih kolesih poveča zaradi teže pluga. Plug razbremeni sprednji del traktorja, teža pa se prenese na zadnja kolesa (Napaka! Neznan argument stikala.).
16
M G FG
B P Ap= ⋅ − ⋅ = → =
⋅=∑ 0 2 1 6 0
1 62
2400; ,,
F NA
V smeri osi x ne deluje nobena sila. Ravnotežna enačba za os y:
F F F Q F Q FF
iy B p B p A
B
= + − = → = +
= + =∑ 0 0
3000 2400 5400; -
NA
Slika Napaka! Neznan argument stikala.
Zgled Napaka! Neznan argument stikala.
Izračunajte osne obremenitve pri mirujočem traktorju (slika 12).
Slika Napaka! Neznan argument stikala.
FX∑ = 0 v smeri osi x ne deluje nobena sila
F F F F
F F F
M F l F a
Fl F
a
Y v h G
h G v
A G S v
vS G
∑
∑
= + − =
= −
= ⋅ − ⋅ =
=⋅
0 0
0 0
:
:
17
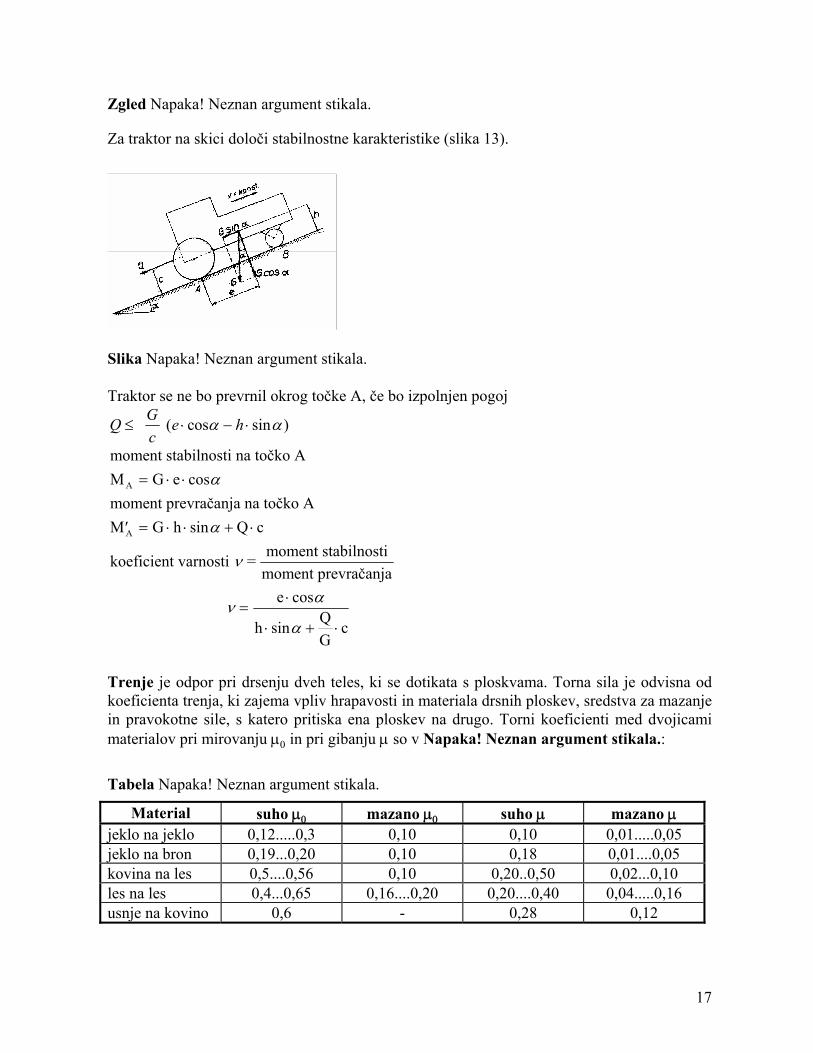
Zgled Napaka! Neznan argument stikala.
Za traktor na skici določi stabilnostne karakteristike (slika 13).
Slika Napaka! Neznan argument stikala. Traktor se ne bo prevrnil okrog točke A, če bo izpolnjen pogoj
Q Gc
e h≤ ⋅ − ⋅ ( cosα αsin )
moment stabilnosti na točko A
moment prevračanja na točko A
koeficient varnosti = moment stabilnostimoment prevračanja
e
M G e
M G h Q c
h QG
c
A
A
= ⋅ ⋅
′ = ⋅ ⋅ + ⋅
=⋅
⋅ + ⋅
cos
sin
cos
sin
α
α
ν
ν α
α
Trenje je odpor pri drsenju dveh teles, ki se dotikata s ploskvama. Torna sila je odvisna od koeficienta trenja, ki zajema vpliv hrapavosti in materiala drsnih ploskev, sredstva za mazanje in pravokotne sile, s katero pritiska ena ploskev na drugo. Torni koeficienti med dvojicami materialov pri mirovanju μ0 in pri gibanju μ so v Napaka! Neznan argument stikala.:
Tabela Napaka! Neznan argument stikala.
Material suho μ0 mazano μ0 suho μ mazano μ jeklo na jeklo 0,12.....0,3 0,10 0,10 0,01.....0,05 jeklo na bron 0,19...0,20 0,10 0,18 0,01....0,05 kovina na les 0,5....0,56 0,10 0,20..0,50 0,02...0,10 les na les 0,4...0,65 0,16....0,20 0,20....0,40 0,04.....0,16 usnje na kovino 0,6 - 0,28 0,12

18
Zgled Napaka! Neznan argument stikala.
Zaboj teže G = 6 kN ima tendenco gibanja navzdol po strmini pod kotom α = 45°. Kolikokrat moramo oviti vrv okoli nepremičnega valja A, če je velikost sile v vrvi S = 80 N in s strmino oklepa kot β = 30°. Torni koeficient μ = 0,25 (slika 14).
Slika Napaka! Neznan argument stikala.
Sistem razdelimo na dve togi telesi tako, da si ga mislimo prerezanega na mestu a, kjer se pojavi v vrvi sila S1. Ravnotežni pogoji imajo obliko
F : S
: - Six 1
1
= ⋅ + − ⋅ =
= ⋅ + − ⋅ =
= ⋅
∑∑
0 0
0 0
cos sin
sin cos
β α
β α
μ
T G
F N GT N
iy
Če tretjo enačbo vstavimo v prvo, dobimo 0,867 S1⋅ + ⋅ − ⋅ =− ⋅ + − =
0 25 6 0 707 00 5 0 707 01
, ,, ,
NS N
Rešitev enačb je
S1 = =3,1810,992
3,4 kN
Potrebno število ovojev vrvi okrog nepremičnega valja dobimo z uporabo Eulerjeve enačbe in znanih sil v obeh koncih vrvi.
S S e eSS
eSS
SS
e en
11
1
1
42 50 25
15
2
= ⋅ ⇒ =
⋅ ⋅
⋅=
⋅=
= ⋅
μα μα
μ α
αμ
α π
log = log
=log
log log ,. log

19
Potrebno število ovojev vrvi je
n =2απ
= =15
6 282 39
,,
Zgled Napaka! Neznan argument stikala.
Valjar za ravnanje zemljišča s silo teže Q = 2400 N ima polmer r = 40 cm. Kolikšna mora biti vlečna sila F, ki leži pod kotom α = 15° nasproti horizontali, da se valj premakne, če je koeficient e = 1,5 cm (slika 15)?
Slika Napaka! Neznan argument stikala.
M F F e Q e
F Q er e
iB = ⋅ ⋅ + ⋅ ⋅ − ⋅ =
=⋅
⋅ + ⋅=
⋅⋅ + ⋅
=
∑ 0 : cos r
N
α α
α α
sin
cos sin,
, , ,
0
2400 1540 0 98 15 0 17
106
Razdalja e je koeficient kotalnega trenja. Določen je eksperimentalno in ima dimenzijo dolžine v cm. Nekaj vrednosti e kotaljenje krogličnih ležajev 0,001 - 0,005 cm kotaljenje koles železnic 0,02 - 0,05 cm kotaljenje koles po cesti 0,05 - 0,1 cm kotaljenje koles po mehki cesti 0,2 - 2,0 cm
20
2.2 Dinamika
Kinematika
Osnovna naloga kinematike je, da iz znanega zakona gibanja telesa (točke) določi vse kinematične veličine, ki opredeljujejo gibanje telesa (trajektorije, hitrosti, pospeški). Premočrtno gibanje masne točke prikažemo v kinematičnih diagramih (slika 16).
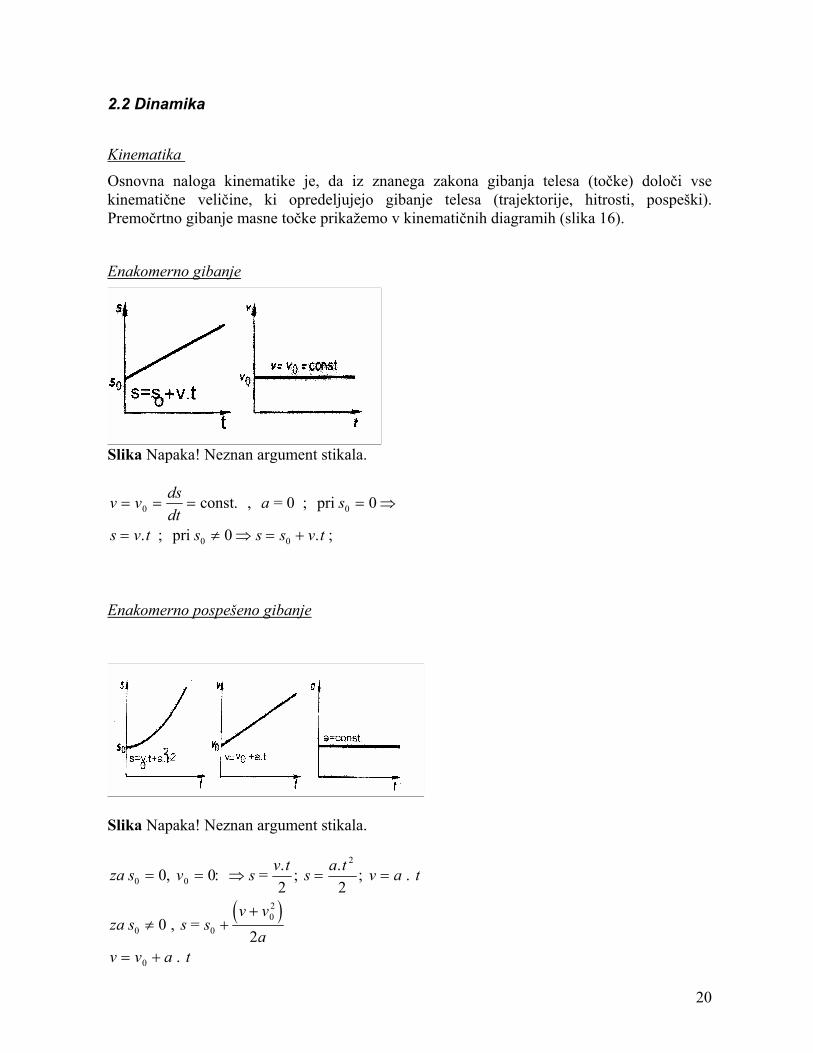
Enakomerno gibanje
Slika Napaka! Neznan argument stikala.
v v dsdt
a s
s v t s s s v t
= = = = ⇒
= ≠ ⇒ = +
0 0
0 0
0
0
const. , = 0 ; pri
; pri ;. .
Enakomerno pospešeno gibanje
Slika Napaka! Neznan argument stikala.
( )za s v s v t s a t v a t
za s s sv v
av v a t
, = .
, =
0 0
2
0 002
0
0 02 2
02
= = ⇒ = =
≠ ++
= +
: ; . ; .
.

21
Zgled Napaka! Neznan argument stikala.
Koliko časa potrebujemo za vožnjo silaže z njive do silosa, če je pot dolga 2,5 km in vozimo s konstantno hitrostjo 12 km/h.
v st
t sv0 = ⇒ = = = →
2,5 .6012
12,5 min 12 min 30 sek
Zgled Napaka! Neznan argument stikala.
Traktor prevozi pot 100 m v času 80 sek s enakomernim pospeševanjem. Kolikšna sta končna hitrost in pospešek traktorja?
( )s s
v v t= +
+ ⋅0
0
2
Začetna pot in hitrost sta nič, zato sledi:
s v t
v st
v v a t a vt
=
= = 2,5 m / s 9 km / h
= 0,031 m / s2
⋅
⋅⋅
= =
+ ⋅ → = = =
2
2 2 10080
2 5800,
Zgled Napaka! Neznan argument stikala.
Pojemek traktorja pri hitrosti 20 km/h je 2,5 m/s2. V kolikšnem času se traktor ustavi in kako dolga je zavorna pot? Začetna pot s0 = 0 in hitrost pri ustavitvi v0 = 0. v a t
t va
= .
= 2,2 s=⋅
=20
2 5 3 6, ,
Pot, ki jo opravi pri zaviranju
s v t=
⋅=
⋅=
220 2 2
2. 22 m

22
Zgled Napaka! Neznan argument stikala.
Traktor vozi s hitrostjo 18 km/h ali 5 m/s. Želimo, da se ustavi v dveh sekundah. Kakšen pojemek nastane pri zaviranju?
Slika Napaka! Neznan argument stikala.
a vt
= = =52
22,5 m / s
Če je pojemek 1,1 m/s2, je čas zaviranja t va
= = =5
114 5
,, s
in zavorna pot s v t= = =
. . , ,2
54 52
11 3 m
Zgled Napaka! Neznan argument stikala.
Koliko daleč od silokombajna (razdalja Sx) še lahko vozimo prikolico, da bo koruzna rezanica z izstopno hitrostjo v0 = 10 m/s padala na voz. Upor zraka zanemarimo. Gibanje koruzne rezanice je sestavljeno iz enakomernega gibanja s hitrostjo v0 v smeri x in enakomerno pospešenega gibanja v smeri y. Pogoj za rešitev naloge je, da mora rezanica v času, v katerem pade za razdaljo Sy, opraviti tudi pot Sx. smer x: S v t0xx = ⋅ ; v0x = začetna, hitrost v smeri x
smer y: S v t + g t20y
2
y = ⋅

23
Slika Napaka! Neznan argument stikala.
Ker je začetna hitrost v0y = 0, sledi, da je v y smeri v času t opravljena pot S g t2
2
y = oziroma
rezanica pade za Sy v času t = 2Sg
y . V tem času pa opravi pri hitrosti v0 pot v smeri x:
S v 2S
g 10 m / s 2 0.5 m
9.81 m / s = 3.19 mx 0
y2= ⋅ = ⋅
⋅
Koruzna rezanica bo pri podanih podatkih padala v prikolico, če jo bomo vozili v oddaljenosti manj kot 3.19 m od izstopnega ustja cevi silokombajna.
Zgled Napaka! Neznan argument stikala.
S kakšno kotno hitrostjo in vrtljaji se mora vrteti izmetalni kolut silokombajna premera 40 cm, če mora biti premočrtno gibanje rezanice 9,4 m/s, da bo rezanica pravilno izstopala, to je padala na prikolico?
ω
ω π ωπ
= = = →
⋅ ⋅⇒
⋅=
⋅⋅
= →
−vr
n
9 40 4
23 5
6023 5 602 314
224 4
1,,
,
,,
, / min
s kotna hitrost rotorja
= 2 n =2
vrt vrtljaji rotorja

24
2.3 Kinetika
Ta veda temelji na treh zakonih, ki jih je leta 1687 odkril Isac Newton. Prvi zakon se glasi, da vsako telo vztraja v mirovanju ali v enakomernem premočrtnem gibanju, dokler ne delujejo nanj takšne sile, da bi mu to stanje spremenile. Drugi zakon (osnovni zakon dinamike) nam pove, da je skalarni produkt mase in vektorja pospeška materialne točke enak vektorju sile, ki nanjo deluje. Smernico in usmerjenost pospeška določa vektor sile
v vF m a= ⋅ . Maso telesa določimo iz pospeška prostega pada m G g= / . Tretji zakon (zakon o akciji in reakciji) se giasi, da dve masni točki delujeta druga na drugo s silama enakih velikosti, vendar nasprotne usmerjenosti.
Zgled Napaka! Neznan argument stikala.
Valj teže G in polmera r = 0,4 m se giblje po mehkem terenu, tako da je deformacija podlage e = 1 cm. V točki 1 se giblje se s hitrostjo v = 2 m/s2. Kolikšno pot s opravi valj, preden se ustavi (slika 20)?
Slika Napaka! Neznan argument stikala. Nalogo rešimo z zakonom o kinetični energiji
( ) ( )W W W
W W m v v J
K K
K K
2 1 1 2
2 1 22
12
0 22
121
212
− =
− = ⋅ − + ⋅ −
,
ω ω
Hitrosti v2 in ω2 sta nič, ker se valj v točki 2 ustavi.
ω 1 =vr1
masni vztrajnostni moment
J 0 =⋅m r 2
2
Na poti od točke 1 do točke 2 je delo zunanjih sil enako samo delu sile trenja pri kotaljenju

25
W er
N s er
m g s1 2, = − ⋅ ⋅ = − ⋅ ⋅ ⋅
Iz zakona o kinetični energiji sledi:
− ⋅ − ⋅ ⋅⎛⎝⎜
⎞⎠⎟ = − ⋅ ⋅ ⋅ 1
2m v m r
vr
er
m g s12 2 1
2
2
12
12
s v re g
m= ⋅⋅
⋅= ⋅
⋅⋅
=34
34
2 0 40 01 10
122 2 ,
,
Zgled Napaka! Neznan argument stikala. Brus premera 600 mm rotira s 120 vrt/min. Določite, kolikšna je normalna sila, ki deluje na brus, če je porabljena moč 1,5 kW, koeficient trenja med brusom in podlago pa 0,2.
Slika Napaka! Neznan argument stikala.
Moč na brusu je P F v T v= ⋅ = ⋅ Sila trenja in obodna hitrost sta =
v = .d2
T N md n
⋅
=⋅ ⋅ ⋅
⋅ω π2
60 2
V osnovno enačbo za moč vstavimo izraze za T in v
P N n d=60
⋅ ⋅⋅ ⋅μ π
Normalna sila je
26
N Pn d
=⋅
⋅ ⋅ ⋅=
⋅ ⋅⋅ ⋅ ⋅
= =60 60 15 10
314 120 0 2 0 6
3
π μ,
, , ,1990 N 1,99 k N
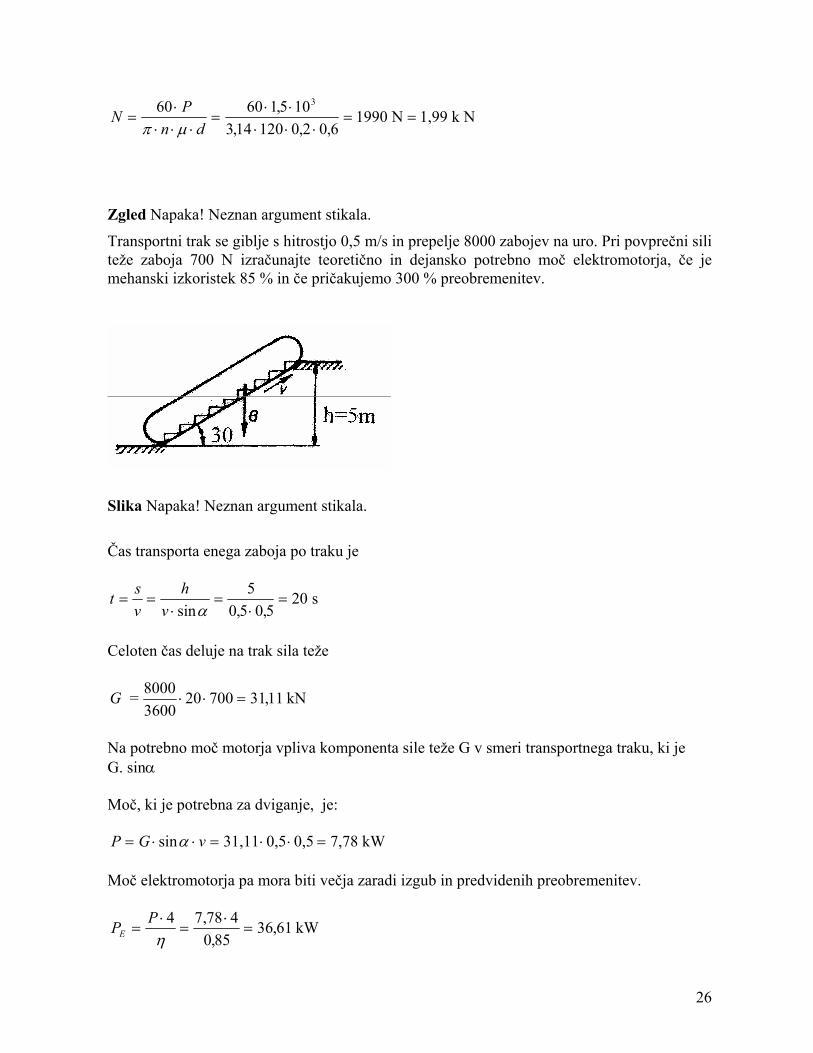
Zgled Napaka! Neznan argument stikala.
Transportni trak se giblje s hitrostjo 0,5 m/s in prepelje 8000 zabojev na uro. Pri povprečni sili teže zaboja 700 N izračunajte teoretično in dejansko potrebno moč elektromotorja, če je mehanski izkoristek 85 % in če pričakujemo 300 % preobremenitev.
Slika Napaka! Neznan argument stikala.
Čas transporta enega zaboja po traku je
t sv
hv
= =⋅
=⋅
=sin , ,α
50 5 0 5
20 s
Celoten čas deluje na trak sila teže
G = 80003600
kN⋅ ⋅ =20 700 3111,
Na potrebno moč motorja vpliva komponenta sile teže G v smeri transportnega traku, ki je G. sinα Moč, ki je potrebna za dviganje, je: P G v= ⋅ ⋅ = ⋅ ⋅ =sinα 31,11 0,5 0,5 7,78 kW Moč elektromotorja pa mora biti večja zaradi izgub in predvidenih preobremenitev.
P PE =
⋅=
⋅=
4 kWη
7 78 40 85
36 61,,
,

27
Zgled Napaka! Neznan argument stikala.
Vozilo teže G = 22 kN doseže v času t = 25 s hitrost 60 km/h (enakomerno pospešeno gibanje). Sila upora je šestina teže vozila. Premer kolesa je 820 mm. Določite, kolikšna moč motorja in kolikšen vrtilni moment je potreben na gredi koles za tako pospeševanje, če je mehanski izkoristek 55 %. Najprej izračunamo silo, ki je potrebna za pospeševanje in premagovanje upora, to je obodno silo na pogonskih kolesih. Iz nje izračunamo vrtilni moment na gredi pogonskih koles.
F m a T Gg
vt
G
F
= + =
5,16 10 N3
⋅ ⋅ +
=⋅
⋅⋅
+⋅
= ⋅
622 10
9 8160
3 6 2522 10
6
3 3
, ,
M F d= 2,12 10 Nm3⋅ = ⋅ ⋅ = ⋅2
5 61 10 0 822
3, ,
Največjo potrebno moč motorja izračunamo iz potrebne sile, največje hitrosti in mehanskega izkoristka.
P F v= 156,4 kW⋅=
⋅ ⋅⋅ ⋅
=η
5 61 10 603 6 0 55 10
3
3
,, ,
28
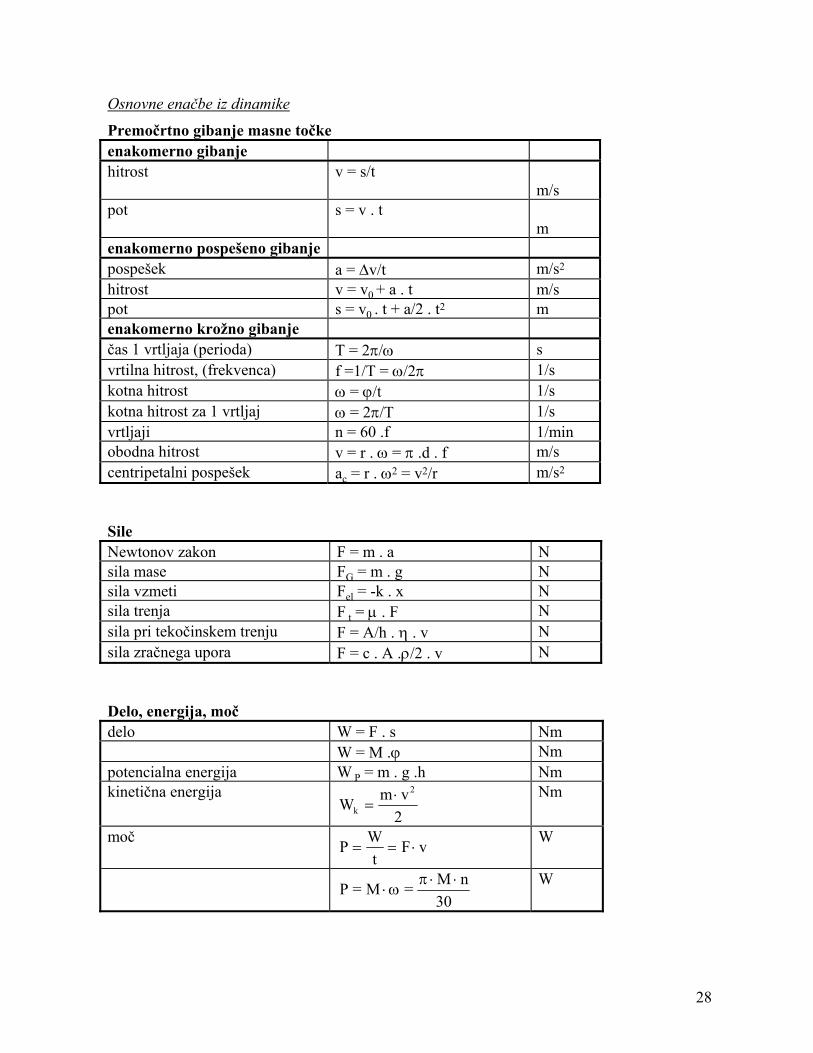
Osnovne enačbe iz dinamike
Premočrtno gibanje masne točke enakomerno gibanje hitrost v = s/t
m/s pot s = v . t
m enakomerno pospešeno gibanje pospešek a = Δv/t m/s2 hitrost v = v0 + a . t m/s pot s = v0 . t + a/2 . t2 m enakomerno krožno gibanje čas 1 vrtljaja (perioda) T = 2π/ω s vrtilna hitrost, (frekvenca) f =1/T = ω/2π 1/s kotna hitrost ω = ϕ/t 1/s kotna hitrost za 1 vrtljaj ω = 2π/T 1/s vrtljaji n = 60 .f 1/min obodna hitrost v = r . ω = π .d . f m/s centripetalni pospešek ac = r . ω2 = v2/r m/s2 Sile Newtonov zakon F = m . a N sila mase FG = m . g N sila vzmeti Fel = -k . x N sila trenja F t = μ . F N sila pri tekočinskem trenju F = A/h . η . v N sila zračnega upora F = c . A .ρ/2 . v N Delo, energija, moč delo W = F . s Nm W = M .ϕ Nm potencialna energija W P = m . g .h Nm kinetična energija
W m vk =
⋅ 2
2
Nm
moč P Wt
F v= = ⋅ W
P = M = M n30
⋅⋅ ⋅
ωπ W

29
2.4 Hidromehanika
Pri nestisljivih tekočinah z maso m sta prostornina V in gostota ρ konstantni. V = konst. ρ = m/V = const V realnem fluidu se med delci tekočine pojavlja trenje, kar imenujemo viskoznost fluida. Viskoznost je odpor fluida proti tangencialnim silam ali kotnim deformacijam delcev. Dinamična viskoznost η je definirana z Newtonowim zakonom
τ η= dvdy
⋅
kjer pomeni τ strižna napetost dv hitrostna razlika slojev v razdalji dy η absolutna (dinamična)viskoznost
Kinematična viskoznost ν je razmerje med dinamično viskoznostjo η in gostoto ρ , oziroma ν = η/ ρ. Temelj hidrostatike je Pascalov zakon, ki pravi, da različne prostornine iste kapljevine pri isti višini delujejo z enakimi tlačnimi silami na enake površine dna posod (slika 23).
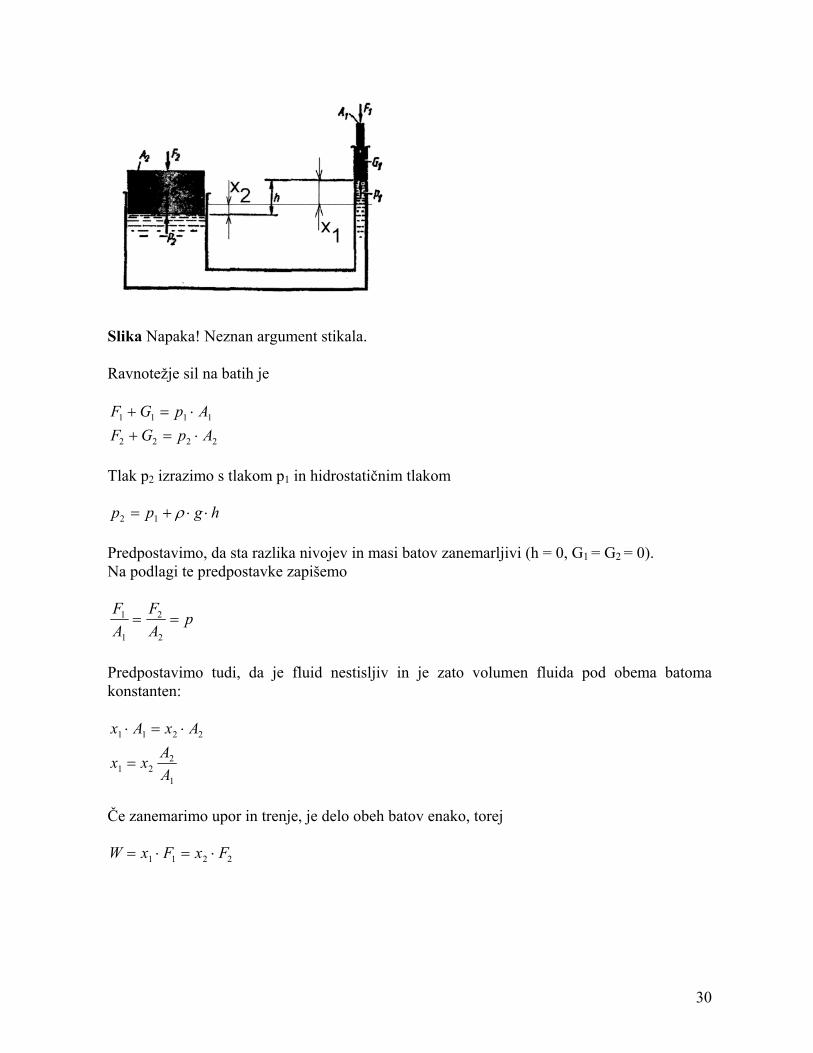
Slika Napaka! Neznan argument stikala. Skica kaže, da so sile na enake površine dna A A A A A A1 2 3 4 5 6= = = = = pri enaki višini gladine enake F F F F F F1 2 3 4 5 6= = = = = . Delovanje hidravličnega dvigala razložimo z dvema posodama, zaprtima z bati površin A1 in A2, ter teže G1 in G2 povezanima med saboj. Na zunanji strani bata delujeta sili F1 in F2 v ravnotežju s tlaki p1 in p2 (slika 24).
30
Slika Napaka! Neznan argument stikala. Ravnotežje sil na batih je F G p AF G p A
1 1 1 1
2 2 2 2
+ = ⋅+ = ⋅
Tlak p2 izrazimo s tlakom p1 in hidrostatičnim tlakom p p g h2 1= + ⋅ ⋅ρ
Predpostavimo, da sta razlika nivojev in masi batov zanemarljivi (h = 0, G1 = G2 = 0). Na podlagi te predpostavke zapišemo FA
FA
p1
1
2
2
= =
Predpostavimo tudi, da je fluid nestisljiv in je zato volumen fluida pod obema batoma konstanten: x A x A
x x AA
1 1 2 2
1 22
1
⋅ = ⋅
=
Če zanemarimo upor in trenje, je delo obeh batov enako, torej W x F x F= ⋅ = ⋅1 1 2 2

31
Zgled Napaka! Neznan argument stikala.
Črpalka črpa vodo iz rezervoarja A v rez.B (slika 25).
Slika Napaka! Neznan argument stikala. Določite specifično energijo Y in potrebno moč za črpanje pri sledečih podatkih. Premer sesalne cevi d1 = 200 mm, premer tlačne cevi d2 = 150 mm, višinska razlika nivoja vode v rez. A do gredi črpalke z1 = 3 m, višinska razlika od gredi črpalke do rez. B je z2 = 32 m. Volumenski pretok črpalke je qv = 60 l/s. Dolžina sesalne cevi je l1 = 5 m, dolžina tlačne cevi l2 = 35 m, koeficient trenja λ = 0,03 koeficient izgub v sesalnih v ceveh Σξ1 = 5 in v tlačnih ceveh Σξ2 = 15. V sesalni cevi ima voda hitrost:
v 1,91 m / s1 = =⋅⋅
=⋅ ⋅
⋅=
−qA
qd
v v
1 12
3
2
4 4 60 100 2 314π , ,
in v tlačni cevi:
v vAA
vdd2 1
1
21
12
22 3 4= ⋅ = ⋅ = , m / s
Specifična energija Y (J/kg) je povečana za izgube v tlačnem in sesalnem vodu.
Y g z z ld
v ld
v= ⋅ − + ⋅ + ⋅ + ⋅ + ⋅( ) ( ) ( )2 1
1
11
12
2
22
22
2 2λ ξ λ ξΣ Σ
Y = ⋅ − + ⋅ + ⋅ + ⋅ + ⋅ =9 81 32 3 0 03 50 2
5 1 912
0 03 350 15
15 3 42
4222 2
, ( ) ( ,,
) , ( ,,
) , J / kg
Potrebno moč izračunamo z upoštevanjem izkoristka črpalke in gostote vode:
P q Yv , ,
31,62 kW=⋅ ⋅
=⋅ ⋅
⋅=
ρη
60 999 1 4221000 0 8
32
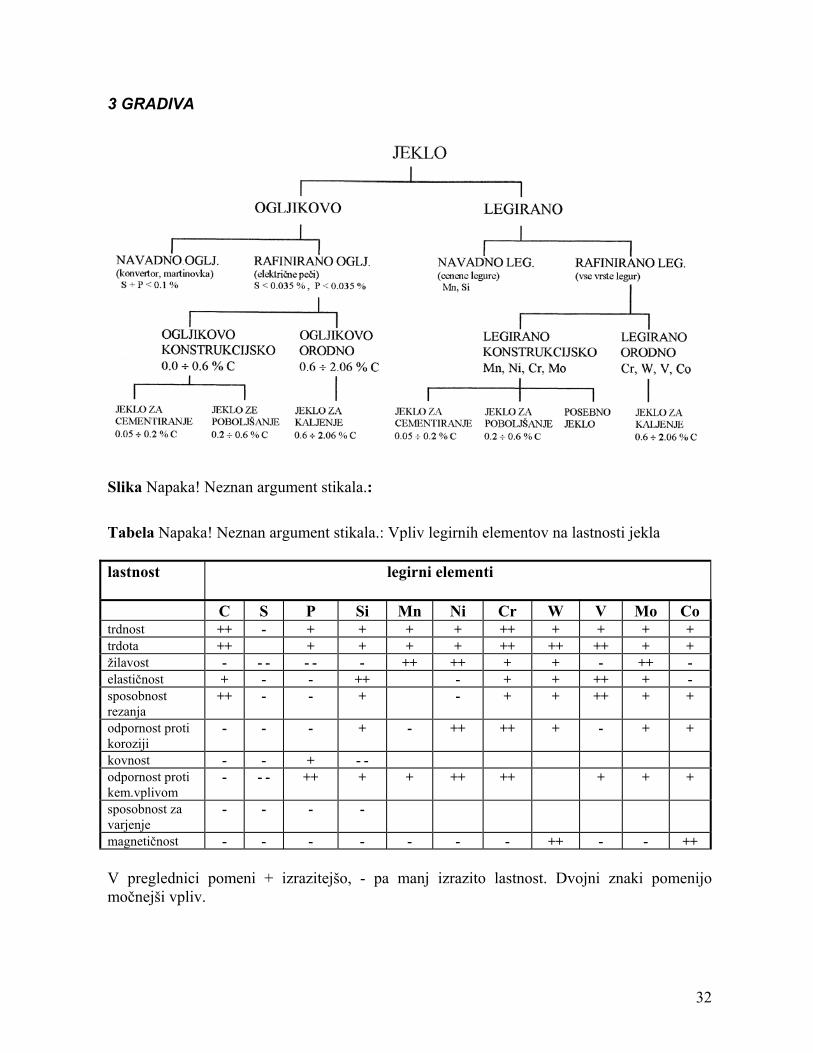
3 GRADIVA
Slika Napaka! Neznan argument stikala.:
Tabela Napaka! Neznan argument stikala.: Vpliv legirnih elementov na lastnosti jekla lastnost
legirni elementi
C S P Si Mn Ni Cr W V Mo Co trdnost ++ - + + + + ++ + + + + trdota ++ + + + + ++ ++ ++ + + žilavost - - - - - - ++ ++ + + - ++ - elastičnost + - - ++ - + + ++ + - sposobnost rezanja
++ - - + - + + ++ + +
odpornost proti koroziji
- - - + - ++ ++ + - + +
kovnost - - + - - odpornost proti kem.vplivom
- - - ++ + + ++ ++ + + +
sposobnost za varjenje
- - - -
magnetičnost - - - - - - - ++ - - ++ V preglednici pomeni + izrazitejšo, - pa manj izrazito lastnost. Dvojni znaki pomenijo močnejši vpliv.
33
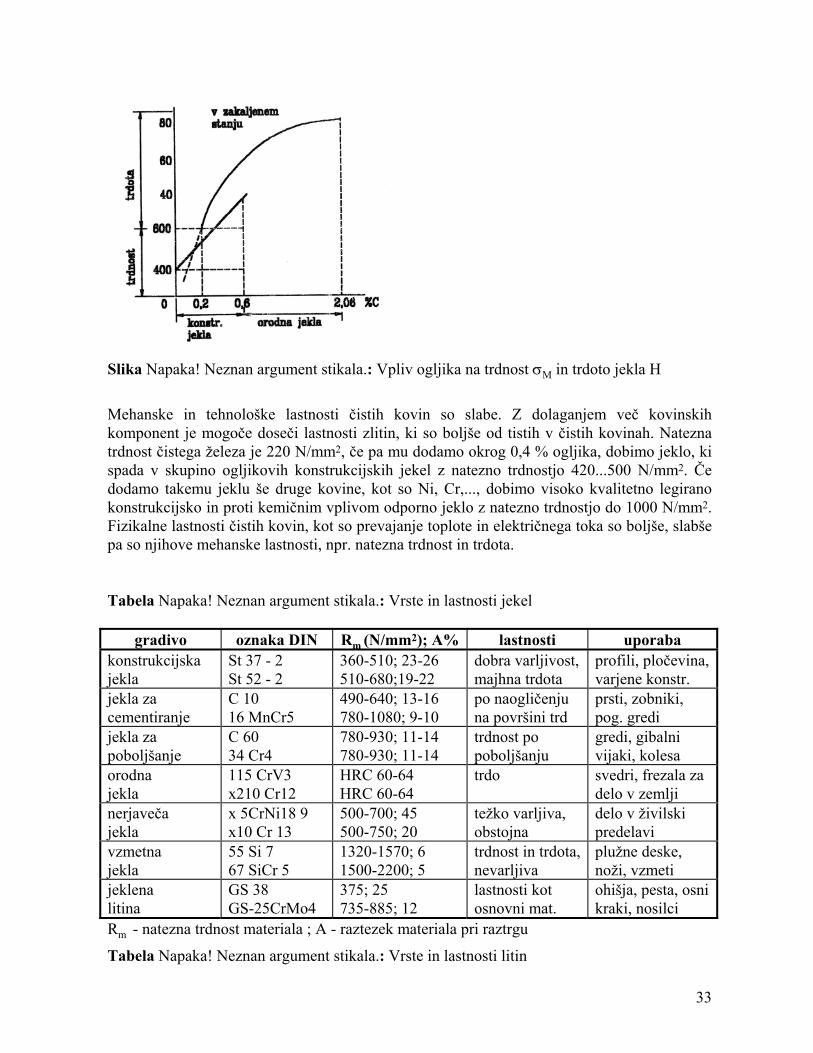
Slika Napaka! Neznan argument stikala.: Vpliv ogljika na trdnost σM in trdoto jekla H
Mehanske in tehnološke lastnosti čistih kovin so slabe. Z dolaganjem več kovinskih komponent je mogoče doseči lastnosti zlitin, ki so boljše od tistih v čistih kovinah. Natezna trdnost čistega železa je 220 N/mm2, če pa mu dodamo okrog 0,4 % ogljika, dobimo jeklo, ki spada v skupino ogljikovih konstrukcijskih jekel z natezno trdnostjo 420...500 N/mm2. Če dodamo takemu jeklu še druge kovine, kot so Ni, Cr,..., dobimo visoko kvalitetno legirano konstrukcijsko in proti kemičnim vplivom odporno jeklo z natezno trdnostjo do 1000 N/mm2. Fizikalne lastnosti čistih kovin, kot so prevajanje toplote in električnega toka so boljše, slabše pa so njihove mehanske lastnosti, npr. natezna trdnost in trdota. Tabela Napaka! Neznan argument stikala.: Vrste in lastnosti jekel
gradivo oznaka DIN Rm (N/mm2); A% lastnosti uporaba konstrukcijska jekla
St 37 - 2 St 52 - 2
360-510; 23-26 510-680;19-22
dobra varljivost, majhna trdota
profili, pločevina, varjene konstr.
jekla za cementiranje
C 10 16 MnCr5
490-640; 13-16 780-1080; 9-10
po naogličenju na površini trd
prsti, zobniki, pog. gredi
jekla za poboljšanje
C 60 34 Cr4
780-930; 11-14 780-930; 11-14
trdnost po poboljšanju
gredi, gibalni vijaki, kolesa
orodna jekla
115 CrV3 x210 Cr12
HRC 60-64 HRC 60-64
trdo
svedri, frezala za delo v zemlji
nerjaveča jekla
x 5CrNi18 9 x10 Cr 13
500-700; 45 500-750; 20
težko varljiva, obstojna
delo v živilski predelavi
vzmetna jekla
55 Si 7 67 SiCr 5
1320-1570; 6 1500-2200; 5
trdnost in trdota, nevarljiva
plužne deske, noži, vzmeti
jeklena litina
GS 38 GS-25CrMo4
375; 25 735-885; 12
lastnosti kot osnovni mat.
ohišja, pesta, osni kraki, nosilci
Rm - natezna trdnost materiala ; A - raztezek materiala pri raztrgu
Tabela Napaka! Neznan argument stikala.: Vrste in lastnosti litin

34
gradivo oznaka
DIN Rm (N/mm2)
A% lastnosti uporaba
siva litina GG - 10 GG - 20
100 1 - 2 200 1 - 2
litina z lusk.grafitom, majhen raztezek
uteži, enostavni zobniki, ohišja ležajev
nodularna litina
GGG - 40 GGG - 60
390 15 600 2
litina s kroglastim gr., Mg-trdnost, raztezek
zobata kolesa, ročke, osni nosilci,
temprana litina-bela
GTW - 35 GTW - 65
340 4 640 3
oksidacija ogljika, bel prelom
deli menjalnika ohišja prenosnikov
temprana litina-črna
GTS - 35 GTS - 65
340 4 640 3
večja žilavost kot GG, črn prelom
prsti strižnih kosilnic, pokrovi ležajev
trda litina GH Si, Mn-dodatek, bela trda površina
lemeži-sejalnica, odmične gredi
Tabela 9: Vrste in lastnosti neželeznih kovin
gradivo oznaka DIN Rm (N/mm2) A% lastnosti uporaba
aluminij Al 99 Al Cu Mg 2 G -Al Mg 3
75 14 -18 440 13 140-190 3-8
velika el. in toplotna prevodnost, varljivost, oksid. obstojnost
naprave za mleko, vodne črpalke, rezervoarji
baker SE -Cu 42 korozijsko obstojen, mehak, lahko preoblikovanje, lotanje
el. vodniki, toplotni izmenjevalniki, tesnila, hladilne cevi
medi CuZn 40 CuZn 36 G-CuZn 40
340 35 290-370 50 300 15
zlitina bakra s cinkom, livnost, trdnost korozijska obstojnost
deli pri škropilnicah, ohišja pri napeljavah, deli črpalk
bron CuSn 6 G-CuSn 10 G-CuSnZnPb G-CuPb15Sn
340-400 55 270 18 240 15 180 8
zlitina bakra in cinka z dodatkom kositra, svinca in aluminija
polžasta gonila, vodila, drsni ležaji, armature, ventili pri črpalkah
cink GDSn 80 Sb 115 2,5
protikorozijska zaščita, lotanje in varjenje
izdelki, narejeni s tlačnim litjem
kositer GDSn 80 Sb 115 2,5 nizka talilna temp. bela pločevina svinec Pb 99,99 mehka kovina zaščita električnih
kablov, akumulatorji
35
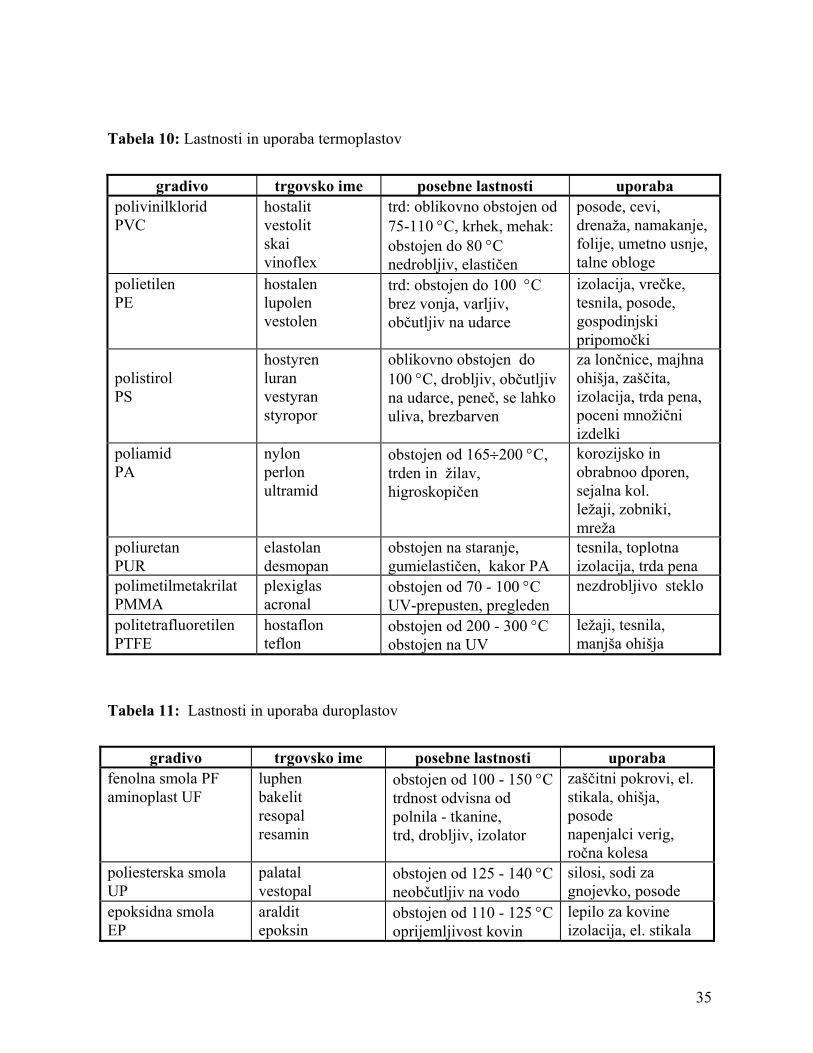
Tabela 10: Lastnosti in uporaba termoplastov
gradivo trgovsko ime posebne lastnosti uporaba
polivinilklorid PVC
hostalit vestolit skai vinoflex
trd: oblikovno obstojen od 75-110 °C, krhek, mehak: obstojen do 80 °C nedrobljiv, elastičen
posode, cevi, drenaža, namakanje, folije, umetno usnje, talne obloge
polietilen PE
hostalen lupolen vestolen
trd: obstojen do 100 °C brez vonja, varljiv, občutljiv na udarce
izolacija, vrečke, tesnila, posode, gospodinjski pripomočki
polistirol PS
hostyren luran vestyran styropor
oblikovno obstojen do 100 °C, drobljiv, občutljiv na udarce, peneč, se lahko uliva, brezbarven
za lončnice, majhna ohišja, zaščita, izolacija, trda pena, poceni množični izdelki
poliamid PA
nylon perlon ultramid
obstojen od 165÷200 °C, trden in žilav, higroskopičen
korozijsko in obrabnoo dporen, sejalna kol. ležaji, zobniki, mreža
poliuretan PUR
elastolan desmopan
obstojen na staranje, gumielastičen, kakor PA
tesnila, toplotna izolacija, trda pena
polimetilmetakrilat PMMA
plexiglas acronal
obstojen od 70 - 100 °C UV-prepusten, pregleden
nezdrobljivo steklo
politetrafluoretilen PTFE
hostaflon teflon
obstojen od 200 - 300 °C obstojen na UV
ležaji, tesnila, manjša ohišja
Tabela 11: Lastnosti in uporaba duroplastov
gradivo trgovsko ime posebne lastnosti uporaba
fenolna smola PF aminoplast UF
luphen bakelit resopal resamin
obstojen od 100 - 150 °Ctrdnost odvisna od polnila - tkanine, trd, drobljiv, izolator
zaščitni pokrovi, el. stikala, ohišja, posode napenjalci verig, ročna kolesa
poliesterska smola UP
palatal vestopal
obstojen od 125 - 140 °Cneobčutljiv na vodo
silosi, sodi za gnojevko, posode
epoksidna smola EP
araldit epoksin
obstojen od 110 - 125 °Coprijemljivost kovin
lepilo za kovine izolacija, el. stikala
36
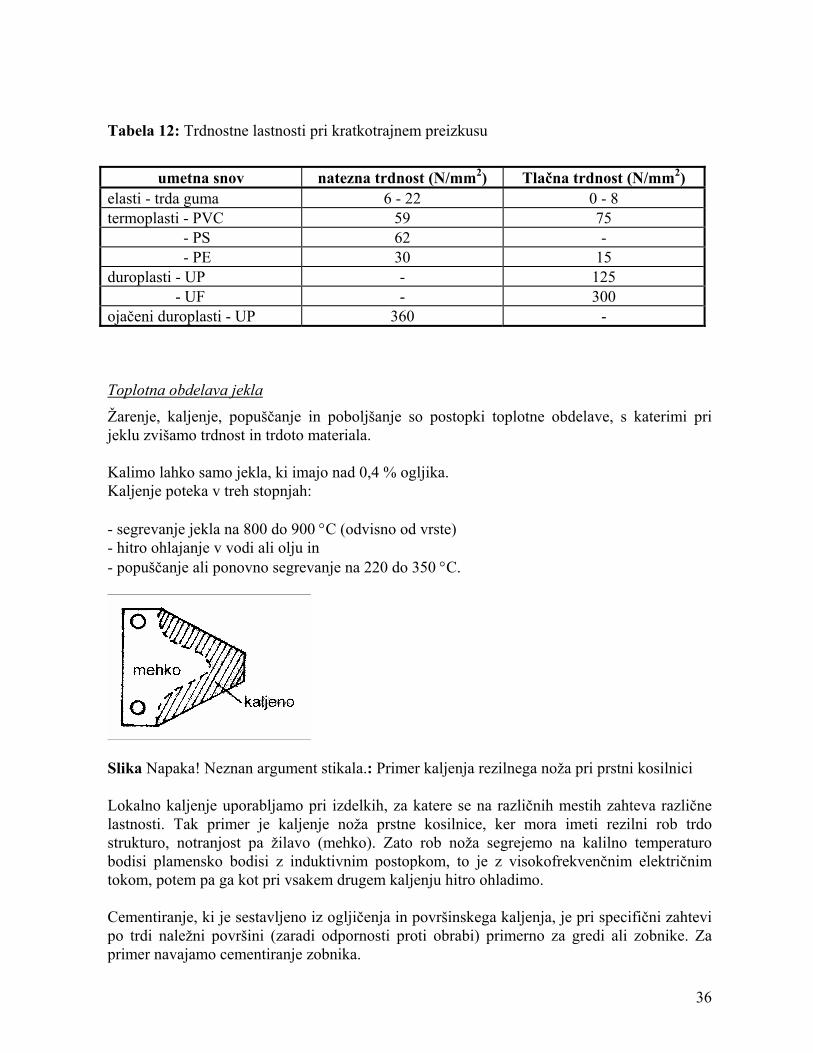
Tabela 12: Trdnostne lastnosti pri kratkotrajnem preizkusu
umetna snov natezna trdnost (N/mm2) Tlačna trdnost (N/mm2)
elasti - trda guma 6 - 22 0 - 8 termoplasti - PVC 59 75 - PS 62 - - PE 30 15 duroplasti - UP - 125 - UF - 300 ojačeni duroplasti - UP 360 -
Toplotna obdelava jekla
Žarenje, kaljenje, popuščanje in poboljšanje so postopki toplotne obdelave, s katerimi pri jeklu zvišamo trdnost in trdoto materiala. Kalimo lahko samo jekla, ki imajo nad 0,4 % ogljika. Kaljenje poteka v treh stopnjah: - segrevanje jekla na 800 do 900 °C (odvisno od vrste) - hitro ohlajanje v vodi ali olju in - popuščanje ali ponovno segrevanje na 220 do 350 °C.
Slika Napaka! Neznan argument stikala.: Primer kaljenja rezilnega noža pri prstni kosilnici Lokalno kaljenje uporabljamo pri izdelkih, za katere se na različnih mestih zahteva različne lastnosti. Tak primer je kaljenje noža prstne kosilnice, ker mora imeti rezilni rob trdo strukturo, notranjost pa žilavo (mehko). Zato rob noža segrejemo na kalilno temperaturo bodisi plamensko bodisi z induktivnim postopkom, to je z visokofrekvenčnim električnim tokom, potem pa ga kot pri vsakem drugem kaljenju hitro ohladimo. Cementiranje, ki je sestavljeno iz ogljičenja in površinskega kaljenja, je pri specifični zahtevi po trdi naležni površini (zaradi odpornosti proti obrabi) primerno za gredi ali zobnike. Za primer navajamo cementiranje zobnika.
37
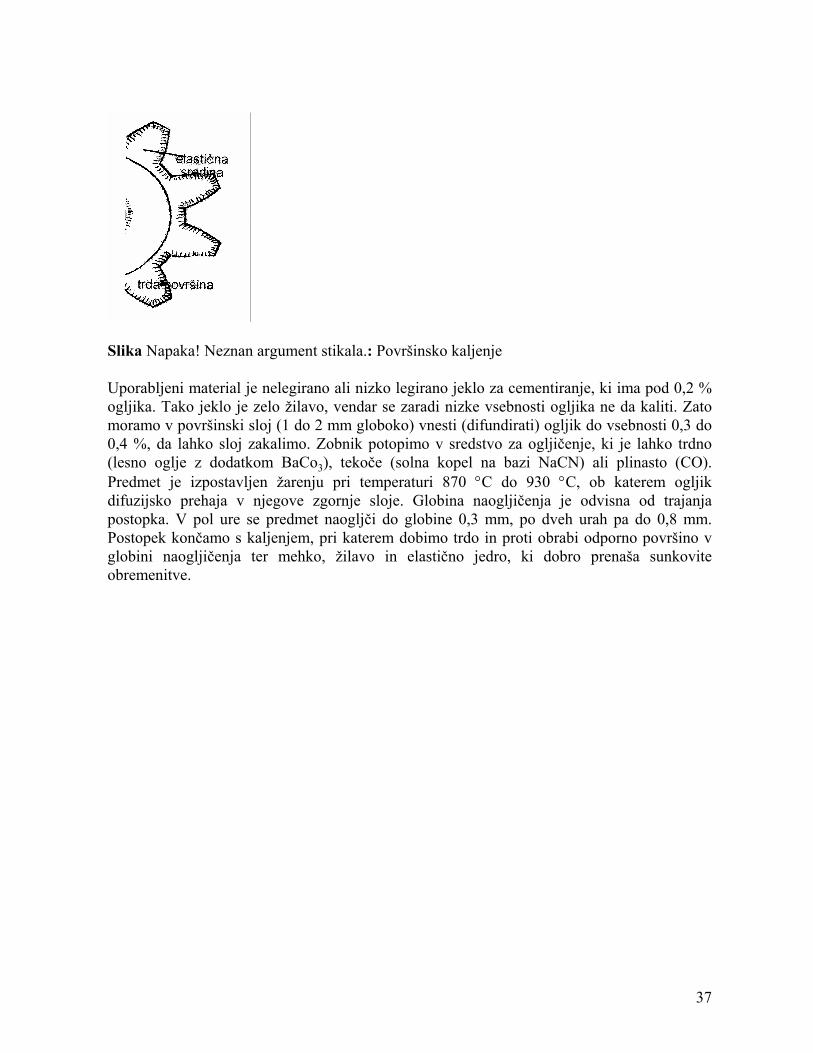
Slika Napaka! Neznan argument stikala.: Površinsko kaljenje Uporabljeni material je nelegirano ali nizko legirano jeklo za cementiranje, ki ima pod 0,2 % ogljika. Tako jeklo je zelo žilavo, vendar se zaradi nizke vsebnosti ogljika ne da kaliti. Zato moramo v površinski sloj (1 do 2 mm globoko) vnesti (difundirati) ogljik do vsebnosti 0,3 do 0,4 %, da lahko sloj zakalimo. Zobnik potopimo v sredstvo za ogljičenje, ki je lahko trdno (lesno oglje z dodatkom BaCo3), tekoče (solna kopel na bazi NaCN) ali plinasto (CO). Predmet je izpostavljen žarenju pri temperaturi 870 °C do 930 °C, ob katerem ogljik difuzijsko prehaja v njegove zgornje sloje. Globina naogljičenja je odvisna od trajanja postopka. V pol ure se predmet naogljči do globine 0,3 mm, po dveh urah pa do 0,8 mm. Postopek končamo s kaljenjem, pri katerem dobimo trdo in proti obrabi odporno površino v globini naogljičenja ter mehko, žilavo in elastično jedro, ki dobro prenaša sunkovite obremenitve.

38
4 STROJNI ELEMENTI
4.1 Razstavljive zveze
Vijačne zveze
Slika Napaka! Neznan argument stikala.: Profil metrskih navojev po ISO
korak navoja: P
teoretična globina navoja = 32
P 0,866P
nosilna globina navoja Ppremeri zunanjega navoja (vijaka)
, premeri notranjega navoja (matice)= ; = = - ;
H
H Hd d dD D Dd D d D d H d D d H
=
= =−
−= = −
1
1 2
1 2
1 1 1 2 2
5 8 0 541
2 3 4
/ ,, ,
,/
Tabela13: Primer označevanja metrskih navojev v priročnikih
označba P (mm) d = D (mm) d2 = D2 (mm) d1 = D1 (mm) A (mm2) M6 1 6 5,35 4,917 17,9 M8 1,25 8 7,18 6,64 32,8 M10 1,5 10 9,02 8,37 52,3 M12 1,75 12 10,86 10,10 76,2 M16 2 16 14,70 13,83 144
Primer uporabe gibalnega vijaka, katerega uporabnost je odvisna od kota vzpona vijačnice α in koeficienta trenja μ med gibalnim vijakom in matico (μ = 0,1; ρ = 5° 40′ - torni kot, (slika 31)

39
Slika Napaka! Neznan argument stikala.
Tabela 14: Oznake za kakovost vijakov (nelegirana jekla)
razred trdnosti napetost lezenja (N/mm2)
natezna trdnost(N/mm2)
razteznost (%) trdota (HB)
4.8 320 400...550 14 110...170 5.8 400 500...700 10 140...215 6.8 480 600...800 8 170...245 12.9 1080 1200...1400 8 330..440
Računski zgledi računanja vijačnih zvez
Zgled Napaka! Neznan argument stikala.
Določi premer vijaka, ki ima namesto glave kavelj. Pritrjen je z matico na nosilec (slika 32) in obremenjen s statično natezno silo F = 60000 N. Vijak s kavljem je izdelan iz konstrukcijskega jekla Č.0561, ki ima napetost lezenja Rp 0,2 = 360 N/mm2. Po vrsti obremenitve določimo dopustno napetost, ki je σ dop = 0,8 · Rp 0,2 = 0,8 · 360 = 288,0 N/mm2
40
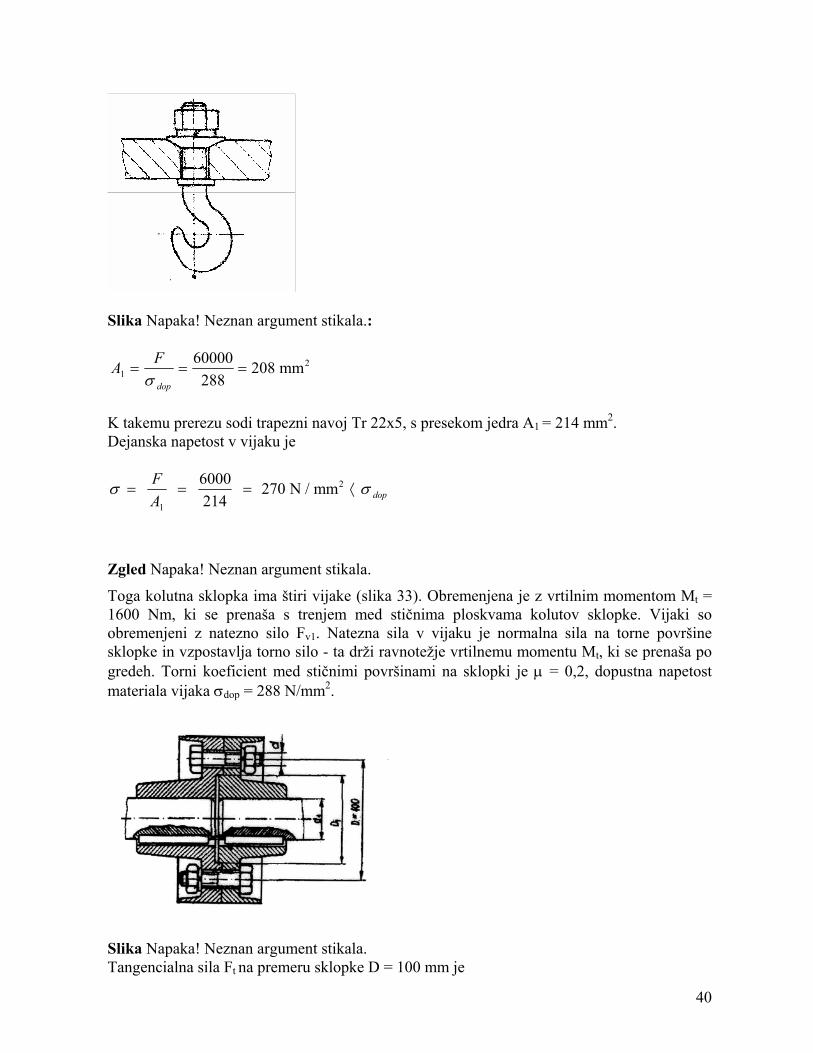
Slika Napaka! Neznan argument stikala.:
A F
dop1
260000288
208= = =σ
mm
K takemu prerezu sodi trapezni navoj Tr 22x5, s presekom jedra A1 = 214 mm2. Dejanska napetost v vijaku je
σ σ N / mm 2= = = ⟨FA dop
1
6000214
270
Zgled Napaka! Neznan argument stikala.
Toga kolutna sklopka ima štiri vijake (slika 33). Obremenjena je z vrtilnim momentom Mt = 1600 Nm, ki se prenaša s trenjem med stičnima ploskvama kolutov sklopke. Vijaki so obremenjeni z natezno silo Fv1. Natezna sila v vijaku je normalna sila na torne površine sklopke in vzpostavlja torno silo - ta drži ravnotežje vrtilnemu momentu Mt, ki se prenaša po gredeh. Torni koeficient med stičnimi površinami na sklopki je μ = 0,2, dopustna napetost materiala vijaka σdop = 288 N/mm2.
Slika Napaka! Neznan argument stikala. Tangencialna sila Ft na premeru sklopke D = 100 mm je

41
F MtDt =⋅
=⋅
=2 2 1600
0 132000
, N
in se porazdeli na štiri vijake. Na vsak vijak pride tangencialna sila
Ft1 8000= =32000
4 N ,
ki jo posamezni vijak ustvari s trenjem. Iz tangencialne oziroma torne sile in koeficienta trenja izračunamo potrebno natezno silo v vijaku.
FF
vt
11
0
80000 2
40000= = =μ ,
N
Na podlagi natezna sile v vijaku in dopustne napetosti določimo najmanjši nosilni presek vijaka.
AFv
dop
= ⋅ = ⋅ =1 22 40000288
1 41 195 83σ
, , mm
Najbližji večji prerez (A1 = 255 mm2) ima vijak M20. Izračunamo, kolikšna je dejanska napetost v vijaku
σ = = =FA1
240000255
156 86, N / mm
Mozniki
Skupna lastnost moznikov je, da je stična ploskev med pestom in moznikom ravna. Moznik prenaša enosmerni vrtilni moment prek bokov. Razlikujemo tesni in drsni moznik. Pri tesnem mozniku je pesto kolesa pritrjeno z vijakom na moznik, kolo se ne more osno premikati po gredi, če pa se kolo med vrtenjem mora občasno osno pomikati po mozniku, to imenujemo zveza z drsnim moznikom.
42
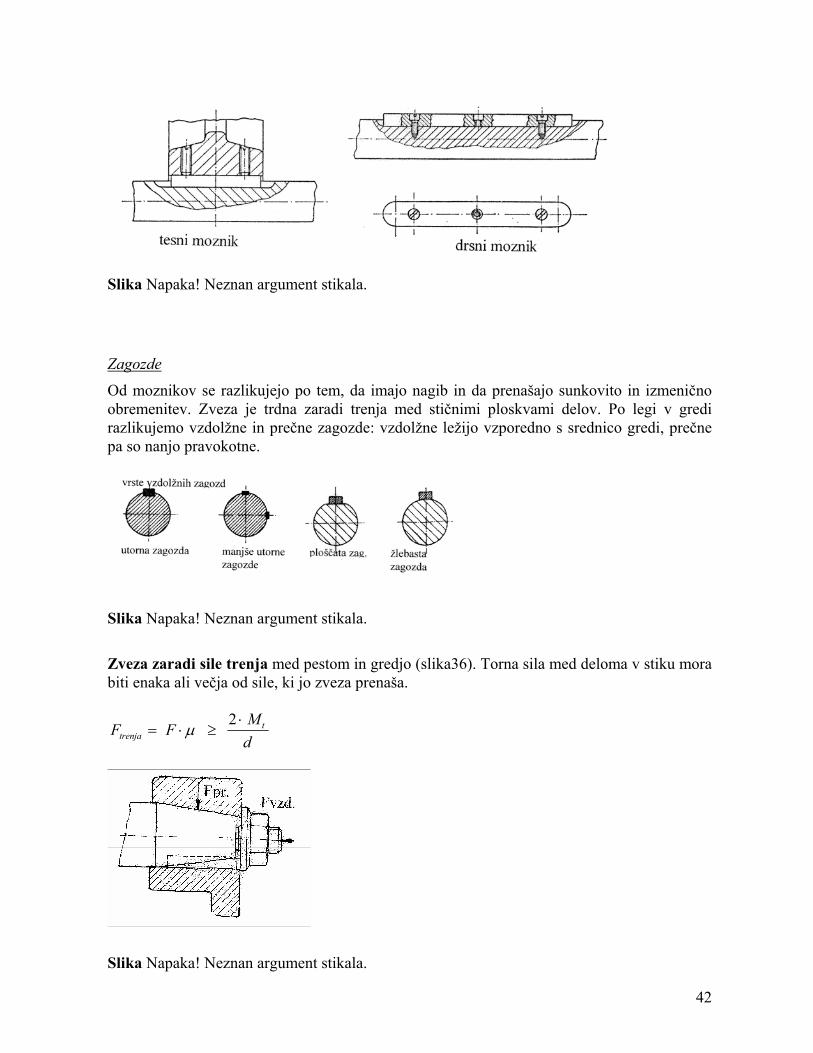
Slika Napaka! Neznan argument stikala.
Zagozde
Od moznikov se razlikujejo po tem, da imajo nagib in da prenašajo sunkovito in izmenično obremenitev. Zveza je trdna zaradi trenja med stičnimi ploskvami delov. Po legi v gredi razlikujemo vzdolžne in prečne zagozde: vzdolžne ležijo vzporedno s srednico gredi, prečne pa so nanjo pravokotne.
Slika Napaka! Neznan argument stikala.
Zveza zaradi sile trenja med pestom in gredjo (slika36). Torna sila med deloma v stiku mora biti enaka ali večja od sile, ki jo zveza prenaša.
F FMdtrenja
t= ⋅ ≥⋅
μ2
Slika Napaka! Neznan argument stikala.

43
Sorniki
Uporabljamo jih za razstavljivo členkasto izvedbo strojnih delov. Obremenjeni so na ploščinski tlak, strig in upogib. Načeloma so izdelani tako, da je l / d = 1,5 do 1,7 in l / b = 2 do 3,5.
Zgled Napaka! Neznan argument stikala.
ploščinski tlak med sornikom in drogom (slika 37):
σ σp p dopF
d l=
⋅≤
med sornikom in vilicami:
σ σp p dopFb d
=⋅
≤2
kontrola sornika na strižno napetost:
τ τ πs s dop
FA
A d= ≤ =
⋅ ;
2
4
kontrola sornika na upogibno napetost:
σ σfup up
f
MW
Md
= ≅⋅
≤10
3 dop
upogibni moment:
( )M
F l bup =
⋅ +
8

44
Slika Napaka! Neznan argument stikala.
Zatiči
So najenostavnejši strojni elementi za razstavljivo zvezo (slika38). Uporablja se za trdno zvezo dveh delov (pesta z gredjo), ali za utrditev medsebojne lege dveh strojnih delov. Obdelani so na toleranco (tesni prileg). Trdnost zatiča je večja od trdnosti delov, ki jih povezuje. Zatič je med obratovanjem obremenjen s prečnimi silami, ki povzročajo strig ali upogib oziroma oboje hkrati, in ploščinskim pritiskom.
Slika Napaka! Neznan argument stikala.
izračun zatiča Upogibne napetosti se izračunajo na mestih, kjer so lahko največje upogibni moment M F hup = ⋅
Napetost v zatiču zaradi upogibnega momenta
σ fupM
W= ⋅ −; W = 0,1 d 3 odpornostni moment okroglega prereza
Ploščinski tlak pri vseh načinih obremenitve zatiča
σ pF
d s=
⋅
ploščinski tlak pri obremenitvi zaradi upogiba
45
σ p
F h s
d s=
⋅ +⎛⎝⎜
⎞⎠⎟
⋅
⋅2
6
2
in skupni
σ p sk
F hs
d s =⋅ ⋅ + ⋅⎛
⎝⎜⎞⎠⎟
⋅
4 1 15,
strižna napetost nastane zaradi vzvoja na prečni zatič:
τπs
tMD d
=⋅
⋅ ⋅
42 ;
vzdolžni zatič:
τ stM
D d l=
⋅⋅ ⋅
2
; l - dolžina vzdolžnega zatiča.
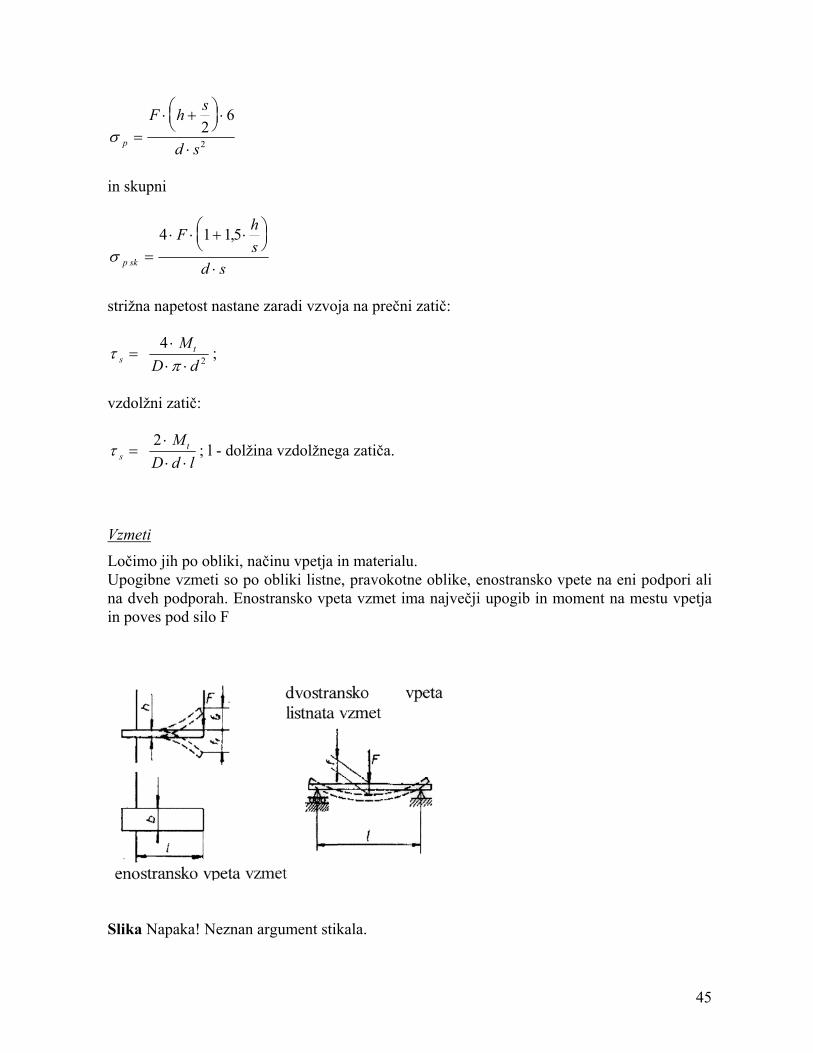
Vzmeti
Ločimo jih po obliki, načinu vpetja in materialu. Upogibne vzmeti so po obliki listne, pravokotne oblike, enostransko vpete na eni podpori ali na dveh podporah. Enostransko vpeta vzmet ima največji upogib in moment na mestu vpetja in poves pod silo F
Slika Napaka! Neznan argument stikala.

46
Upogibna napetost v enostransko vpeti vzmeti:
σ σfup
f dop
MF
F lb h
= =⋅ ⋅⋅
≤ 6
2
enačba za izračun povesa vzmeti:
f F lE J
J b h=
⋅⋅ ⋅
=⋅3 3
3 12; - ploskovni vztrajnostni moment
izračun napetosti in povesa pri upogibni vzmeti na dveh podporah je:
σ σf f dopF l
b hf F l
E J=
⋅ ⋅⋅ ⋅
≤ =⋅
⋅ ⋅ ;
64 482
3
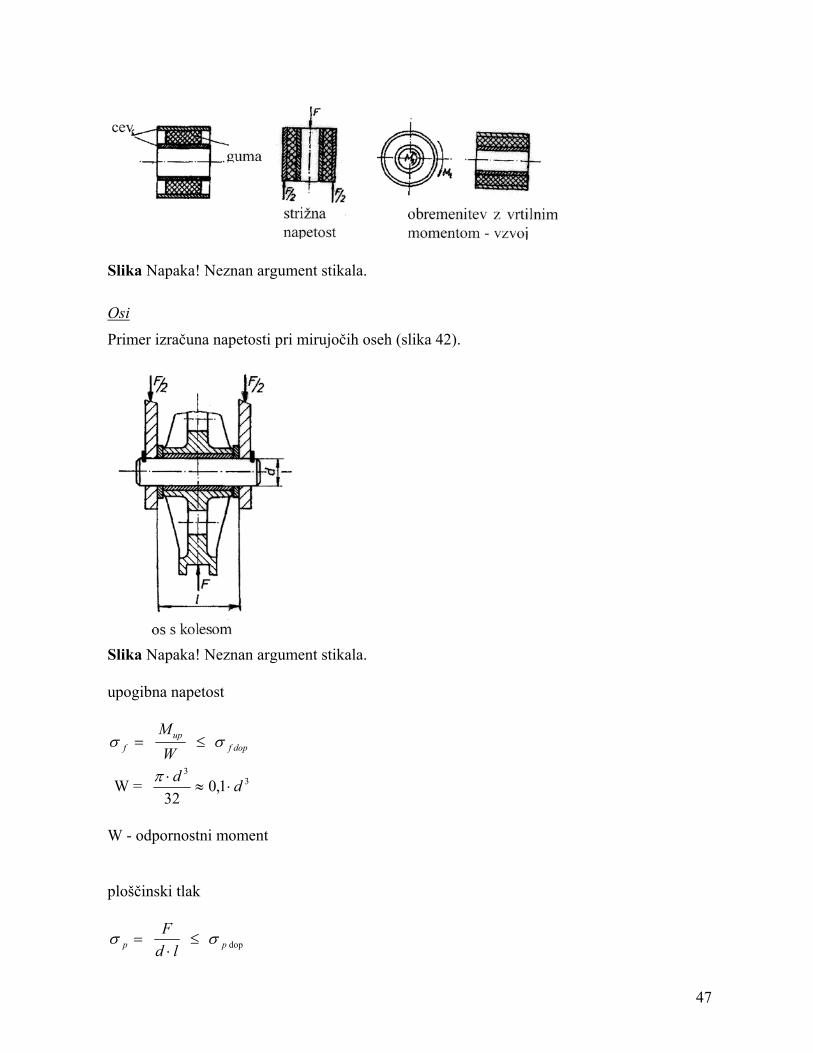
Slika Napaka! Neznan argument stikala. Po obliki se vzmeti ločijo na spiralne, vijačne, krožnično-membranske in torzijske, po uporabljenem materialu pa tudi gumijaste, ki imajo določene prednosti pred jeklenimi (slika 41), toda pri majhnih obremenitvah imajo že velike deformacije. Zaradi deformacij nastaja v vzmeti notranje trenje, ki povzroči, da ima gumijasta vzmet pri obremenitvi drugačno karakteristiko kakor pri razbremenitvi, zato jih uporabljamo za dušenje nihanj in zvoka. Gumijaste vzmeti so obremenjene s strižno, tlačno in torzijsko napetostjo.
47
Slika Napaka! Neznan argument stikala.
Osi
Primer izračuna napetosti pri mirujočih oseh (slika 42).
Slika Napaka! Neznan argument stikala. upogibna napetost
σ σ
π
fup
f dop
MW
d d
= ≤
⋅≈ ⋅
W =
33
320 1,
W - odpornostni moment ploščinski tlak
σ σp pF
d l=
⋅≤ dop

48
Primer izračunavanja napetosti v gredeh in vpliv vrtljajev na gred (slika 43)
σ fupM
WW d= ≈ ⋅; 0 1 3, - upogibna napetost
τ πt
t
pp
MW
W d= =
⋅ ;3
16
Wp - vzvojni odpornostni moment prereza
ασ
τ0 =⋅
1,73
dop
dop
f
t
- Huberjev kvocient
( )σ σ α τp f t= + ⋅ ⋅ 20
23 - primerjalna napetost
Slika Napaka! Neznan argument stikala. Strojni element, ki se vrti skupno z gredjo, navadno nima težišča v središču gredi. Zato se pri vrtenju pojavi centrifugalna sila C, ki je usmerjena iz središča gredi skozi težišče navzven. Tej nasprotna in enaka je sila F, ki izhaja iz trdnosti gredi. Deformacija zaradi sile C je sorazmerna s kvadratom števila vrtljajev gredi in ni odvisna od povesa f.

49
4.2 Nerazstavljive zveze
Zvari
Vrste zvarov (slika 44):
Slika Napaka! Neznan argument stikala.
Izračun soležnega zvara obremenjenega na nateg, tlak in strig (slika 45):
Slika Napaka! Neznan argument stikala. Nateg in tlak
σ σzvzv
zvFA
= ≤ dop
Strig
τ τzvzv
zvF
A= ≤ dop
A a lzv = ⋅∑ Azv - prerez nosilnega zvara, σ τzv dop zv dop; - dopustni napetosti za nateg, tlak in strig, l - dolžina zvara, a - višina zvara, s - debelina pločevine. Pri izračunu upoštevamo dejansko nosilno dolžino zvara, zato je l l a= −1 2 . Izračun napetosti v kotnem zvaru (slika 46):

50
Čista upogibna napetost se redko pojavi v varjeni zvezi, običajno je zaradi prečne (strižne) sile v skupni prisotna še tangencialna napetost.
Slika Napaka! Neznan argument stikala. Upogibno napetost izračunamo po enačbi
σ σfup
zvf
MW zv zv. dop. = ≤
Strižna napetost
τ τzv. dop= ≤FAzv
zv
Lotani spoji
Taki spoji so praviloma obremenjeni samo na strig (slika 47).
Slika Napaka! Neznan argument stikala. maksimalna strižna sila F A dop≤ ⋅ τ A l b= ⋅ - nosilni prerez lotanega spoja
51
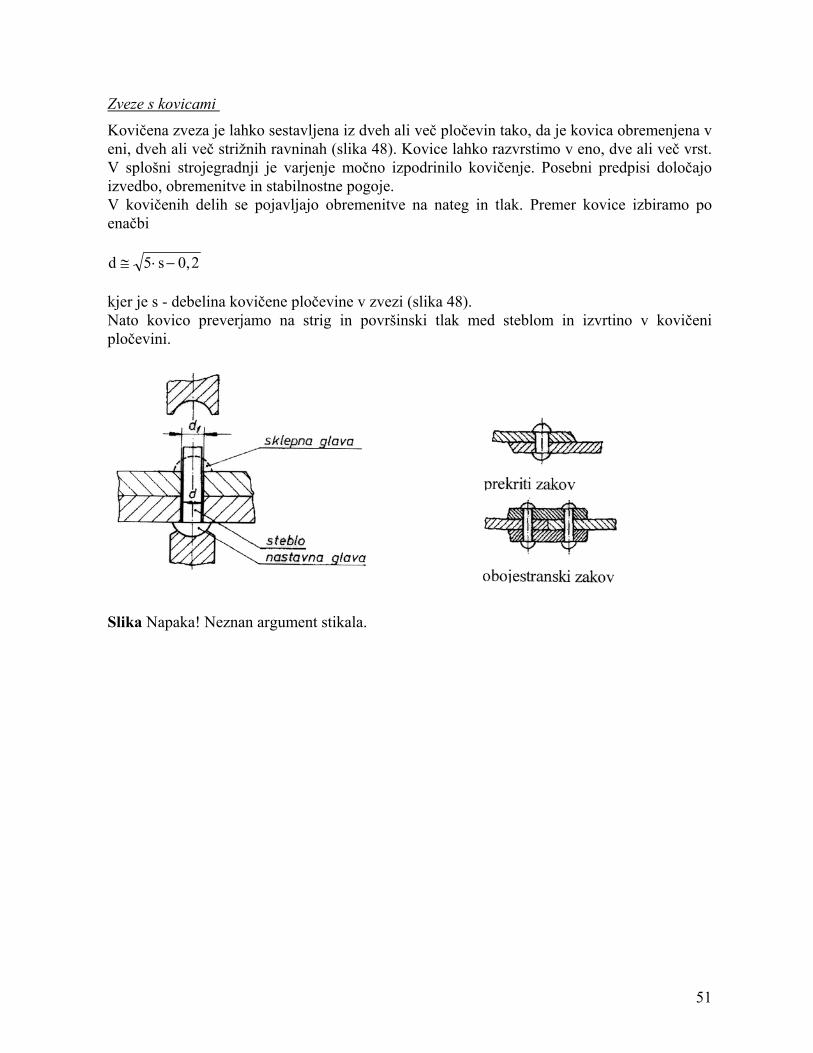
Zveze s kovicami
Kovičena zveza je lahko sestavljena iz dveh ali več pločevin tako, da je kovica obremenjena v eni, dveh ali več strižnih ravninah (slika 48). Kovice lahko razvrstimo v eno, dve ali več vrst. V splošni strojegradnji je varjenje močno izpodrinilo kovičenje. Posebni predpisi določajo izvedbo, obremenitve in stabilnostne pogoje. V kovičenih delih se pojavljajo obremenitve na nateg in tlak. Premer kovice izbiramo po enačbi d s≅ ⋅ −5 0 2, kjer je s - debelina kovičene pločevine v zvezi (slika 48). Nato kovico preverjamo na strig in površinski tlak med steblom in izvrtino v kovičeni pločevini.
Slika Napaka! Neznan argument stikala.
52
5 TRDNOST
5.1 Mehanske lastnosti in obremenitve materialov
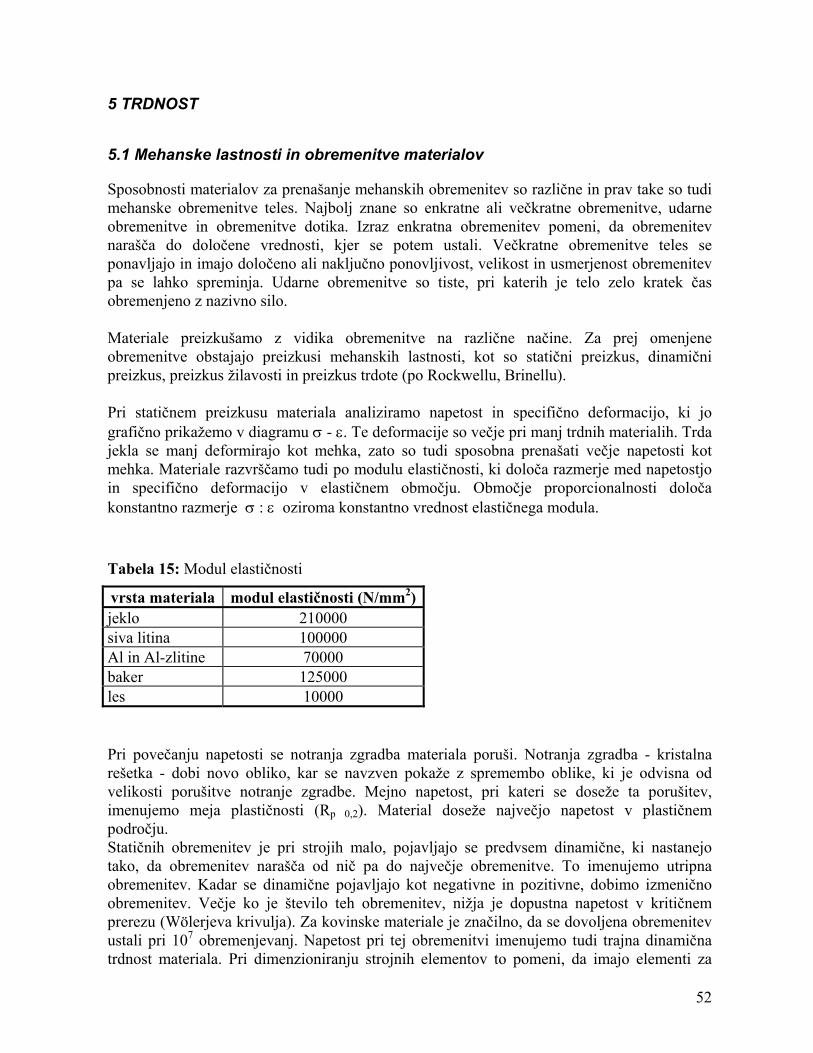
Sposobnosti materialov za prenašanje mehanskih obremenitev so različne in prav take so tudi mehanske obremenitve teles. Najbolj znane so enkratne ali večkratne obremenitve, udarne obremenitve in obremenitve dotika. Izraz enkratna obremenitev pomeni, da obremenitev narašča do določene vrednosti, kjer se potem ustali. Večkratne obremenitve teles se ponavljajo in imajo določeno ali naključno ponovljivost, velikost in usmerjenost obremenitev pa se lahko spreminja. Udarne obremenitve so tiste, pri katerih je telo zelo kratek čas obremenjeno z nazivno silo. Materiale preizkušamo z vidika obremenitve na različne načine. Za prej omenjene obremenitve obstajajo preizkusi mehanskih lastnosti, kot so statični preizkus, dinamični preizkus, preizkus žilavosti in preizkus trdote (po Rockwellu, Brinellu). Pri statičnem preizkusu materiala analiziramo napetost in specifično deformacijo, ki jo grafično prikažemo v diagramu σ - ε. Te deformacije so večje pri manj trdnih materialih. Trda jekla se manj deformirajo kot mehka, zato so tudi sposobna prenašati večje napetosti kot mehka. Materiale razvrščamo tudi po modulu elastičnosti, ki določa razmerje med napetostjo in specifično deformacijo v elastičnem območju. Območje proporcionalnosti določa konstantno razmerje σ : ε oziroma konstantno vrednost elastičnega modula.
Tabela 15: Modul elastičnosti
vrsta materiala modul elastičnosti (N/mm2)jeklo 210000 siva litina 100000 Al in Al-zlitine 70000 baker 125000 les 10000 Pri povečanju napetosti se notranja zgradba materiala poruši. Notranja zgradba - kristalna rešetka - dobi novo obliko, kar se navzven pokaže z spremembo oblike, ki je odvisna od velikosti porušitve notranje zgradbe. Mejno napetost, pri kateri se doseže ta porušitev, imenujemo meja plastičnosti (Rp 0,2). Material doseže največjo napetost v plastičnem področju. Statičnih obremenitev je pri strojih malo, pojavljajo se predvsem dinamične, ki nastanejo tako, da obremenitev narašča od nič pa do največje obremenitve. To imenujemo utripna obremenitev. Kadar se dinamične pojavljajo kot negativne in pozitivne, dobimo izmenično obremenitev. Večje ko je število teh obremenitev, nižja je dopustna napetost v kritičnem prerezu (Wölerjeva krivulja). Za kovinske materiale je značilno, da se dovoljena obremenitev ustali pri 107 obremenjevanj. Napetost pri tej obremenitvi imenujemo tudi trajna dinamična trdnost materiala. Pri dimenzioniranju strojnih elementov to pomeni, da imajo elementi za
53
doseganje stanja trajne dinamične trdnosti v primeru s trdnostjo materiala 3- do 7- krat večje statične vrednosti prerezov. Toda pri tem je pomembna oblika obremenitve (utripna ali izmenična).
Značilnosti loma strojnih elementov
Porušeni prerez je pri vsakem elementu navadno tudi kritični prerez. Iz videza porušenega prereza lahko sklepamo nekatere značilnosti - groba struktura preloma, kovinski sijaj je enakomeren preko porušenega prereza; če nazivne obremenitve elementa niso bile presežene, je bil izdelan iz nepravega
materiala. Če je prelom raven, so nastopale samo normalne napetosti, če pa je glede na glavno os kritičnega prereza pod kotom 450, so nastopale še tangencialne napetosti.
- fina struktura preloma, kovinski sijaj preko porušenega prereza; del je bil dinamično obremenjen, porušitev zaradi trenutne precejšne preobremenite.
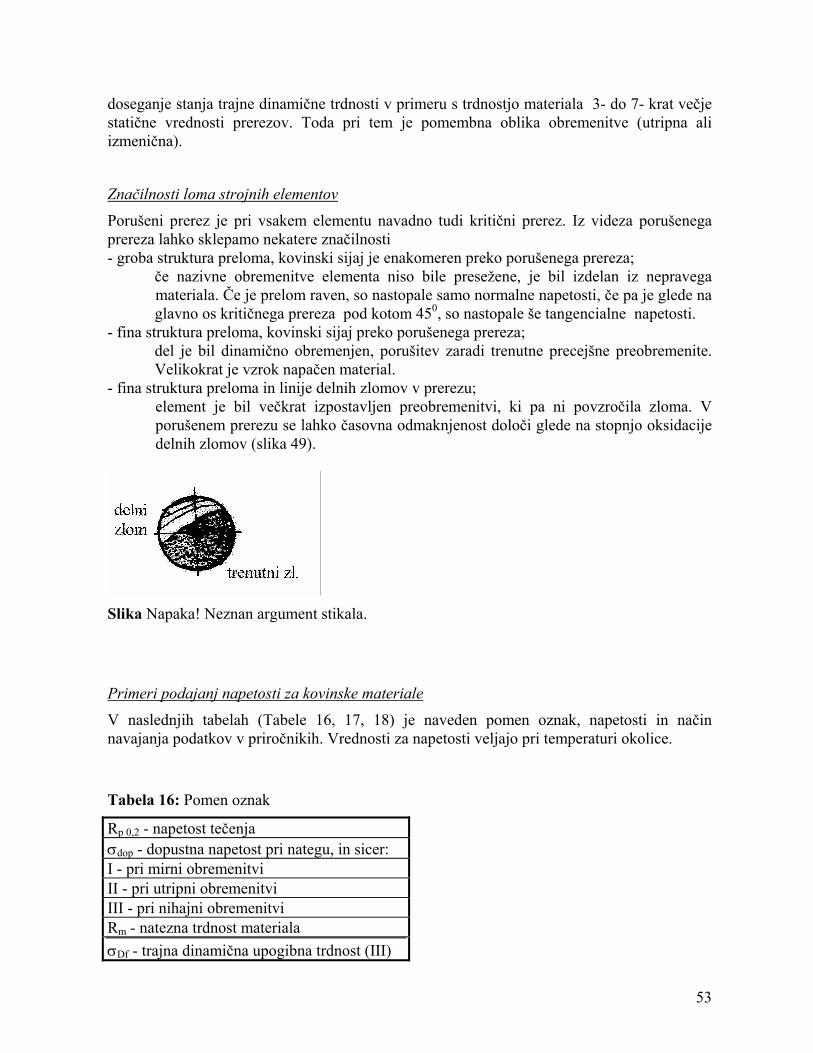
Velikokrat je vzrok napačen material. - fina struktura preloma in linije delnih zlomov v prerezu; element je bil večkrat izpostavljen preobremenitvi, ki pa ni povzročila zloma. V porušenem prerezu se lahko časovna odmaknjenost določi glede na stopnjo oksidacije delnih zlomov (slika 49).
Slika Napaka! Neznan argument stikala.
Primeri podajanj napetosti za kovinske materiale
V naslednjih tabelah (Tabele 16, 17, 18) je naveden pomen oznak, napetosti in način navajanja podatkov v priročnikih. Vrednosti za napetosti veljajo pri temperaturi okolice.
Tabela 16: Pomen oznak
Rp 0,2 - napetost tečenja σdop - dopustna napetost pri nategu, in sicer: I - pri mirni obremenitvi II - pri utripni obremenitvi III - pri nihajni obremenitvi Rm - natezna trdnost materiala σDf - trajna dinamična upogibna trdnost (III)
54
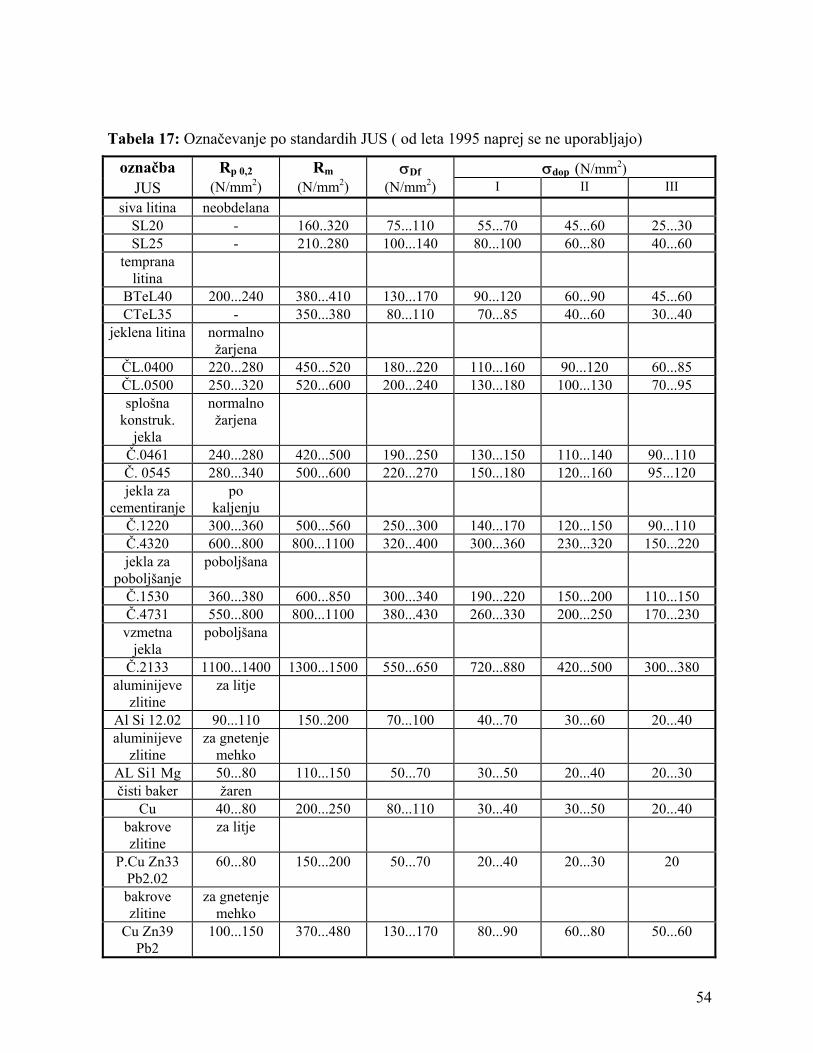
Tabela 17: Označevanje po standardih JUS ( od leta 1995 naprej se ne uporabljajo)
označba Rp 0,2 Rm σDf σdop (N/mm2) JUS (N/mm2) (N/mm2) (N/mm2) I II III
siva litina neobdelana SL20 - 160..320 75...110 55...70 45...60 25...30 SL25 - 210..280 100...140 80...100 60...80 40...60
temprana litina
BTeL40 200...240 380...410 130...170 90...120 60...90 45...60 CTeL35 - 350...380 80...110 70...85 40...60 30...40
jeklena litina normalno žarjena
ČL.0400 220...280 450...520 180...220 110...160 90...120 60...85 ČL.0500 250...320 520...600 200...240 130...180 100...130 70...95 splošna
konstruk. jekla
normalno žarjena
Č.0461 240...280 420...500 190...250 130...150 110...140 90...110 Č. 0545 280...340 500...600 220...270 150...180 120...160 95...120 jekla za
cementiranje po
kaljenju
Č.1220 300...360 500...560 250...300 140...170 120...150 90...110 Č.4320 600...800 800...1100 320...400 300...360 230...320 150...220 jekla za
poboljšanje poboljšana
Č.1530 360...380 600...850 300...340 190...220 150...200 110...150 Č.4731 550...800 800...1100 380...430 260...330 200...250 170...230 vzmetna
jekla poboljšana
Č.2133 1100...1400 1300...1500 550...650 720...880 420...500 300...380 aluminijeve
zlitine za litje
Al Si 12.02 90...110 150..200 70...100 40...70 30...60 20...40 aluminijeve
zlitine za gnetenje
mehko
AL Si1 Mg 50...80 110...150 50...70 30...50 20...40 20...30 čisti baker žaren
Cu 40...80 200...250 80...110 30...40 30...50 20...40 bakrove zlitine
za litje
P.Cu Zn33 Pb2.02
60...80 150...200 50...70 20...40 20...30 20
bakrove zlitine
za gnetenje mehko
Cu Zn39 Pb2
100...150 370...480 130...170 80...90 60...80 50...60

55
Tabela 18: Dopustne napetosti za nekovinske materiale
material modul elastičnosti
dopustne napetosti
E nateg σdop
tlak - σdop
upogib σf dop
strig τs dop
N/mm2 les
hrastovina in bukovina
14000 1000
10,5 0,5
7...12 3
8...14 -
1
2,5 les iglavcev
11000 550
9 0,3
6...11 2
7...13 -
0,9 1
beton - nearmiran
14000 - 36000
- 1,5...8 - -
Zgledi izračunov s področja trdnosti
Zgled Napaka! Neznan argument stikala.
Nateg Okrogla palica s premerom d = 10 mm in dolžine 2 m je obremenjena z natezno silo F = 8000 N. Dopustna natezna napetost materiala je 132 N/mm2. Izračunaj raztezek palice, natezno napetost in varnostni količnik, če je natezna trdnost materiala Rm = 340 N/mm2. Nosilni prerez palice
A d=
⋅=
⋅=
π 2 2
4314 10
478 5, , mm2
Raztezek palice se določi po enačbi Δ
Δl
l EF
A El F l
A E= = =
⋅→ =
⋅⋅
=⋅
⋅ ⋅=ε σ 8000 2000
78 5 2 1 105, ,0,97 mm
modul elastičnosti E = 2,1.105 N/mm2. Natezna napetost v palici
σ = = =FA
800078 5
101 9,
, N / mm2

56
Dejanska natezna napetost v palici je manjša od dopustne napetosti v materialu: σ σ≤ dop
Varnostni količnik: ν σσ
= = =m 340101 9
3 34,
,
Zgled Napaka! Neznan argument stikala.
Tlak Litoželezni votli strojni element z zunanjim premerom d = 210 mm je dolg l = 380 mm in nosi breme F = 430 kN. Kolikšen mora biti notranji premer stebra d1 pri dopustni tlačni napetosti 40 N/mm2? Kakšen skrček elementa nastane pri tej obremenitvi? Iz obremenitve in dopustne napetosti izračunamo prerez votlega strojnega elementa, ki je
A F
dop
= = =σ
43000040
10750 2 mm
Iz enačbe za izračun površine votlega okroglega dela izračunamo d1.
( ) ( )A d d d d= − ⋅ = − ⋅ = → =212 2
12 2
14210 314
410750 174π , mm mm
Debelino stene izračunamo: 210 1742
18−= mm
Skrček stebra izračunamo z enačbo: Δl F lA E
=⋅⋅
, če predpostavimo, da je E = 1,105 N/mm2
Δl =⋅ ⋅
⋅=
430 10 38010750 10
0 1523
5 , mm
Zgled Napaka! Neznan argument stikala.
Ploščinski tlak Kolikšen je ploščinski tlak pri drsnem ležaju s premerom d = 80 mm in dolžine l = 190 mm, če je obremenitev ležaja F = 80000 N? Ploščina stične ploskve med ležajem in tečajem je A d l= ⋅ = ⋅ =80 190 15200 2 mm
Dejanski ploščinski tlak
σ pFA
= = =8000015200
5 26, N / mm2

57
Zgled Napaka! Neznan argument stikala.
Strig Dve plošči sta povezani s kovico, za katero je dopustna strižna napetost τs dop = 80 N/mm2. Kovica je obremenjena s strižno silo F = 40000 N. Izračunaj premer kovice! Nosilni prerez kovice je
A F
dop
= = =τ
4000080
500 mm2
Premer kovice
A d d A=
⋅→ =
⋅=
⋅=
ππ
2
44 4 500
31425 2
,, mm
Izberemo prvi večji standardni premer kovice, ki je d = 26 mm.
Zgled Napaka! Neznan argument stikala.
Upogib S kolikšno obremenitvijo se lahko obremeni enostransko vpeti nosilec, izdelan iz jeklenega profila I26, če deluje nanj sila F na razdalji l = 2,4 m od točke vpetja? Dopustna upogibna napetost: σf dop = 120 N/mm2 Jekleni profil I26 ima odpornostni moment Wx = 442 cm2
Izraz za dopustno napetost je: σ f dopMW =
Iz izraza izračunamo upogibni moment, s katerim je obremenjen jekleni nosilec na področju dopustnih napetosti M W Nmmf dop= ⋅ = ⋅ ⋅ = ⋅σ 120 442 10 5304 103 4 Upogibni moment je tudi M F l= ⋅ . Iz izraza izračunamo silo, ki jo lahko prenaša nosilec.
F Ml
= =⋅
=5304 10
240022 1
4
, kN
Zgled Napaka! Neznan argument stikala.
Vzvoj (torzija) Kolikšen mora biti premer okrogle jeklene palice, ki je obremenjena z vzvojnim momentom

58
T = 8000 Nm, če je dopustna vzvojna napetost τdop = 80 N/mm2 ?
Iz τ tt
TW
= dobimo enačbo za vzvojni odpornostni moment prereza
W Tt
t
=τ
Za okrogli profil je vzvojni odpornostni moment prereza W d dt =⋅
≅ ⋅π 3
3
160 2,
Z izenačitvijo izrazov
W T dtt
= ≅ ⋅τ
0 2 3,
dobimo, da je
d T
dop
=⋅
=⋅⋅0 2
8000 100 2 80
79 43
33
, ,,
τ = mm

59
6 STROJNI DELI ZA PRENOS VRTILNIH GIBANJ
a - torni prenos b - zobniški prenos c - polžni prenos d - jermenski prenos e - verižni prenos Slika Napaka! Neznan argument stikala.: Oblike delov za prenos vrtilnih gibanj Veličine za prenos vrtilnih gibanj (slika51):
ω (m/s) - kotna hitrost D (m) - premer kolesa n (s-1) - vrtilna frekvenca v (m/s) - obodna hitrost Slika Napaka! Neznan argument stikala.

60
Obodna hitrost je pri verižnih ali zobniških prenosih enaka (v1 = v2), pri prenosih, kot so torna gonila in jermenski prenosi, pa zaradi spodrsavanja med gnanim in pogonskim kolesom ni tako (v1 > v2). Smer vrtenja pogonskega in gnanega kolesa je pri neposrednem dotiku (zobniški, torni prenos) različna, pri pogonih z pregibno zvezo (jermen, veriga) pa enaka. Na pogonskem kolesu, zobniku ali verižniku je moč P1, ki se prenaša na gnano kolo, zobnik ali verižnik in jo označimo P2, pri tem pa se vedno pojavijo izgube moči (energije), tako da je vedno P1 > P2. Izguba moči pri prenosu je predstavljena z mehanskim izkoristkom pogona.
Definirana je kot razmerje η =PP
2
1
in je vedno manjši od 1.
Zobniški prenos
Zgled Napaka! Neznan argument stikala.
Imamo tristopenjski reduktor oziroma tri pare čelnih zobnikov (slika 52). Moč motorja PI je 10 kW pri vrtilni frekvenci 16,67 vrt/s. Izkoristek posamezne stopnje prenosnika je η = 0,9.
Slika Napaka! Neznan argument stikala. Med vsakim parom zobnikov je prestavno razmerje.
izz1
2
1
4010
4= = =
izz2
4
3
3015
2= = =
izz3
6
5
2010
2= = =
i i i icel = ⋅ ⋅ = ⋅ ⋅ =1 2 3 4 2 2 16 Mehanski izkoristek celotnega prenosa je produkt izkoristkov posameznih stopenj prenosnika oziroma η η η ηcel = ⋅ ⋅ = =1 2 3
30 9 0 73, ,

61
Prestavno razmerje se lahko izračuna tudi iz vrtilne frekvence prvega zobnik n1 in vrtilne frekvence zadnjega zobnika n6,
inn
= 1
6
oziroma vrtilne frekvence prve gredi nI in vrtilne frekvence četrte gredi nIV
inn
I
IV
= ;
ker je: n n nII2 3= = in n n nIII4 5= = . Mehanski izkoristek celotnega zobniškega prenosa se prikaže kot razmerje moči na pogonski gredi PI in moči na zadnji gnani gredi PIV ali pa razmerja posameznih stopenj prenosa moči:
η η η ηcelIV
I
PP
PP
PP
PP
= = ⋅ ⋅ = ⋅ ⋅2
1
4
3
6
51 2 3
Vrtilni moment na izstopni gredi IV iz reduktorja je enak vrtilnemu momentu na vstopni gredi I reduktorja, zmanjšan za mehanske izgube pri prenosu mehanske energije do izstopne gredi IV in povečan za celotno prestavno razmerje v zobniškem prenosniku, tako je vrtilni moment na gredi IV enak
T T i P i Pn
iIV cel cel cel celI
cel cel= ⋅ ⋅ = ⋅ ⋅ =⋅
⋅ ⋅⋅ ⋅1
1
1
1 602
ηω
ηπ
η
T410000 60
2 314 10000 73 16 1115 9=
⋅⋅ ⋅
⋅ ⋅ =,
, , Nm
Obodna sila na jermenici premera 500 mm, ki je pritrjena na IV gredi, je
FT
Djermenice0
42 2 1115 90 5
4461 4=⋅
=⋅
=,
,, N
obodna hitrost jermenice je v r njer jer IV. . , , , ,= ⋅ ⋅ ⋅ = ⋅ ⋅ ⋅ =2 2 0 25 314 1 041 1 636π m / s
vrtilna frekvenca grediIV je nniIV
I
cel
= = =100016
62 5, vrt/min ali 1,041 vrt/s
moč na grediIV ali jermenici je: P F vIV jer= ⋅ = ⋅ =0 4461 4 1 636 7299. , , W ali 7,299 kW. izračunamo jo lahko tudi tako: P PIV I cel= ⋅ = ⋅ =η 10000 0 729 7299, W
62
Polžasti prenos
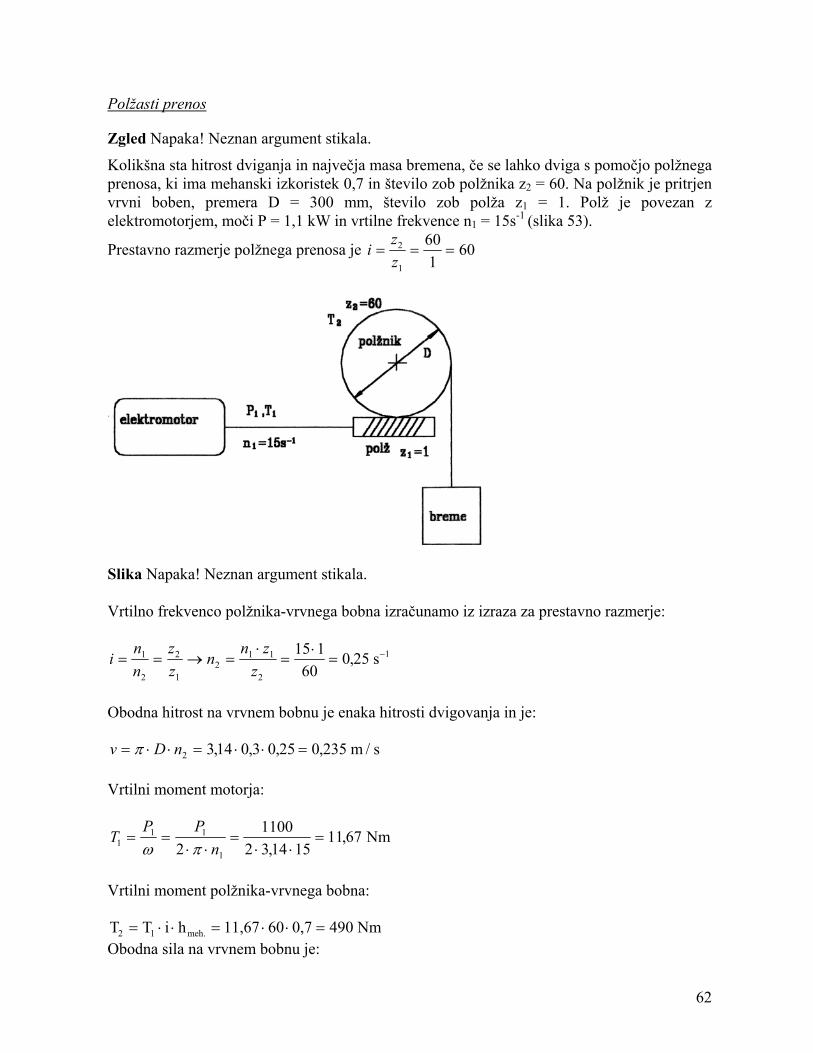
Zgled Napaka! Neznan argument stikala.
Kolikšna sta hitrost dviganja in največja masa bremena, če se lahko dviga s pomočjo polžnega prenosa, ki ima mehanski izkoristek 0,7 in število zob polžnika z2 = 60. Na polžnik je pritrjen vrvni boben, premera D = 300 mm, število zob polža z1 = 1. Polž je povezan z elektromotorjem, moči P = 1,1 kW in vrtilne frekvence n1 = 15s-1 (slika 53).
Prestavno razmerje polžnega prenosa je izz
= = =2
1
601
60
Slika Napaka! Neznan argument stikala. Vrtilno frekvenco polžnika-vrvnega bobna izračunamo iz izraza za prestavno razmerje:
inn
zz
nn z
z= = → =
⋅=
⋅= −1
2
2
12
1 1
2
15 160
0 25, s 1
Obodna hitrost na vrvnem bobnu je enaka hitrosti dvigovanja in je: v D n= ⋅ ⋅ = ⋅ ⋅ =π 2 314 0 3 0 25 0 235, , , , m / s Vrtilni moment motorja:
TP P
n11 1
121100
2 314 1511 67= =
⋅ ⋅=
⋅ ⋅=
ω π ,, Nm
Vrtilni moment polžnika-vrvnega bobna: T T i h 11,67 60 0,7 490 Nm2 1 meh.= ⋅ ⋅ = ⋅ ⋅ = Obodna sila na vrvnem bobnu je:
63
F2 T
D2 490
0,33266 N0
2=⋅
=⋅
=
Masa bremena:
F a m mF
00
9 8132669 81
332 9= ⋅ → = = =, ,
, kg
Drugi možni postopek izračuna:
P P F v FP
vmehmeh
2 1 0 01 1100 0 7
0 2353266= ⋅ = ⋅ → =
⋅=
⋅≈η
η.
. ,.
N
in
mF
= = =0
9 8132669 81
332 9, ,
, kg
Jermenski prenos
Zgled Napaka! Neznan argument stikala.
Določite potrebno moč za pogon in premera d1 in d3 jermenice pri krožni žagi, ki ima obodno hitrost v = 50 m/s in obodno silo na zobu žage F0 = 60 N, premer žage d = 300 mm, d4 = 90 mm, d2 = 120 mm, vrtilna frekvenca gredi-koles n2 = 8,33 s-1 , n2 = 2,5 s-1. Izkoristek posameznega jermenskega prenosa ηm = 0,91 (slika 54). Vrtilno frekvenco gnane gredi jermenice n3 izračunamo iz obodne hitrosti žage
v d n n vd
= ⋅ ⋅ → =⋅
=⋅
= −ππ3 3
50314 0 3
53 05, ,
, s 1
inn
dd
ddn
n= = → = ⋅ = ⋅ =1
2
2
11
2
12
1202 5
8 33 400,
, mm
idd
nn
ddn
n24
3
2
33
4
23
908 33
58 05 627= = → = ⋅ = ⋅ =,
, mm
Potrebno moč za pogon žage izračunamo na jermenici d1 ob upoštevanju mehanskih izgub prenosa:
PP F vz
cel1
0
1 2
60 500 91 0 91
= =⋅
⋅=
⋅⋅
= =η η η. , ,
3622 W 3,6 kW
64
Slika Napaka! Neznan argument stikala.
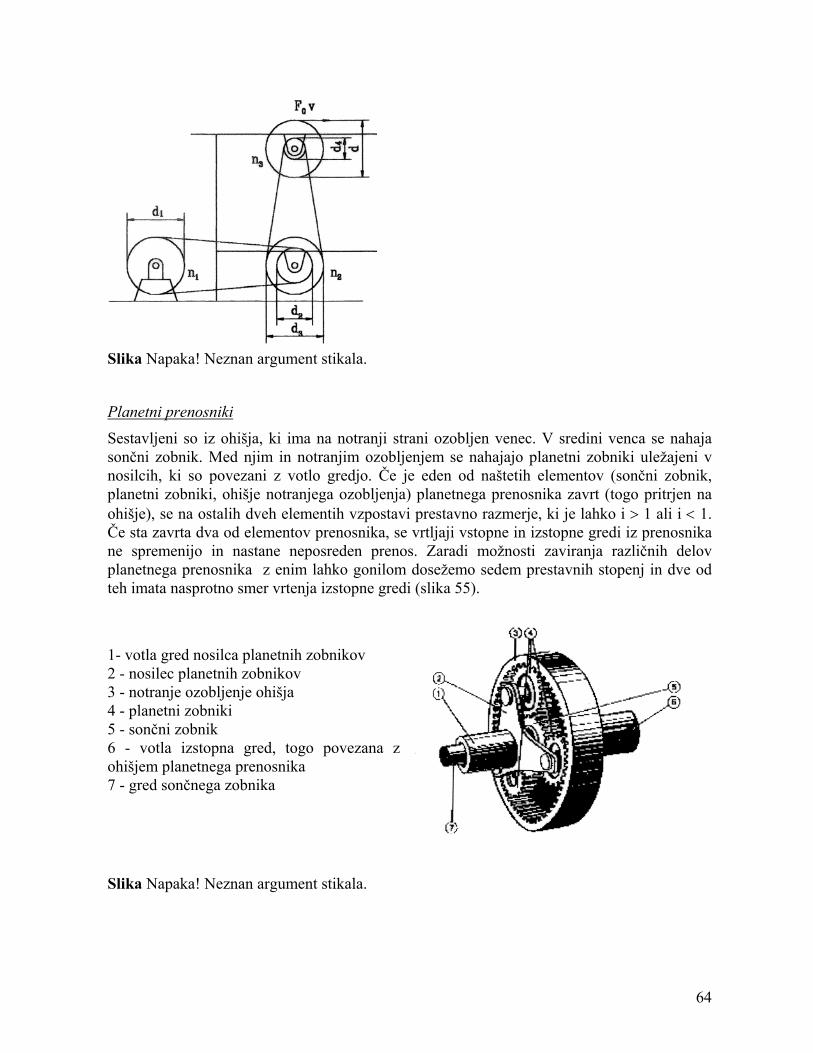
Planetni prenosniki
Sestavljeni so iz ohišja, ki ima na notranji strani ozobljen venec. V sredini venca se nahaja sončni zobnik. Med njim in notranjim ozobljenjem se nahajajo planetni zobniki uležajeni v nosilcih, ki so povezani z votlo gredjo. Če je eden od naštetih elementov (sončni zobnik, planetni zobniki, ohišje notranjega ozobljenja) planetnega prenosnika zavrt (togo pritrjen na ohišje), se na ostalih dveh elementih vzpostavi prestavno razmerje, ki je lahko i > 1 ali i < 1. Če sta zavrta dva od elementov prenosnika, se vrtljaji vstopne in izstopne gredi iz prenosnika ne spremenijo in nastane neposreden prenos. Zaradi možnosti zaviranja različnih delov planetnega prenosnika z enim lahko gonilom dosežemo sedem prestavnih stopenj in dve od teh imata nasprotno smer vrtenja izstopne gredi (slika 55).
Slika Napaka! Neznan argument stikala.
1- votla gred nosilca planetnih zobnikov 2 - nosilec planetnih zobnikov 3 - notranje ozobljenje ohišja 4 - planetni zobniki 5 - sončni zobnik 6 - votla izstopna gred, togo povezana z ohišjem planetnega prenosnika 7 - gred sončnega zobnika

65
7 ZGLEDI IZ MEHANIKE NA POENOSTAVLJENIH PRIMERIH IZRAČUNAVANJA
Mehanika obravnava prenos sil in gibanj po trdnih telesih. Elementi, ki prenašajo gibanje, in sile delujejo na ozkem področju elastičnosti. Elementi so ročice, drogovi, gredi, osi, ohišja, jermeni, verige itd. Ta način prenosa večkrat poenostavljeno izenačimo s prenosom sil in gibanj v hidravliki. Elastični strojni elementi, kot so vzmeti, blažilci ("amortizerji"), se odzivajo na obremenitev s silo z nihanjem, ta način prenosa sil oz. gibanj pa poenostavljeno primerjamo s pnevmatiko. Slika 56 prikazuje avtomatsko napenjanje pomične transportne verige v prikolici za hlevski gnoj. Glavni strojni element napenjanja sta dve zagozdi; povezuje ju nasproti vpeta natezna vzmet, ki ju s stalno silo pritiska na vodilna kolesa transportne verige. Zaradi strmine na zagozdi in stalne sile v vzmeti je transportna veriga vedno enakomerno napeta. Natezna vzmet je v tem primeru shranjevalnik mehanične energije, zagozda pa togo telo, strojni element, po katerem se prenašajo sile.
Slika Napaka! Neznan argument stikala.
Vrtilni moment traktorskega motorja se prenaša kot mehanska energija na hidravlično črpalko, ki je vgrajena v hidrostatično napravo, da upravlja traktorjev krmilni mehanizem. V sklopu te naprave je dvosmerno delujoč hidravlični valj, katerega batnica z določeno silo v obe smeri pomika drog krmilnega mehanizma koles. V vseh strojnih delih za prenos sil ima trdnost posameznih delov pomembno vlogo. Pri prenašanju krmilne sile koles nastaja v materialu strojnih delov notranja napetost. V našem (poenostavljenem) primeru je to tlačna ali natezna napetost, hkrati pa lahko obstajajo še uklonska, upogibna, strižna, vzvojna napetost in sestavljene napetosti. Materiali, ki jih prenašajo, imajo svoje specifične trdnostne lastnosti, ki pa se spreminjajo s temperaturo. Na sliki 57 je primer hidravlične naprave, v kateri z ročno črpalko vzpostavimo hidrostatični tlak 120 barov. Premer bata hidravličnega valja je 80 mm. Gre za prikaz povezanosti napetosti v materialu in trdnosti jekla pri obremenitvi strojnih elementov na tlak. Vgrajeni so v hidravlično stiskalnico; razloženi so pojmi tlak - p, tlačna napetost - σ, površinski tlak - p, natezna trdnost materiala - Rm in varnostni faktor - ν. Pri merskih enotah pogosto uporabljamo poenostavitve, kot so 1 kg/cm2 ≈ 1 kp/cm2 ≈ 1 bar ≈ 10 N/cm2

66
Slika Napaka! Neznan argument stikala. Po zakonu o merskih enotah in merilih je enota SI za tlak - p, napetost - σ,τ; enota 1 pascal, Pa = N/m2 ali 105 Pa = 1 bar. Tlak olja pritiska na površino bata
A d=
⋅=
⋅=
2 2
48 314
450π cm cm
22,
ki povzroči na batnici silo F A p= ⋅ = ⋅ =50 1200 60000 cm N / cm N2 2 Stiskalnica lahko na površino pritisne s silo 60 kN. Če jo izrazimo z enotami za maso, je to 6 t. Batnica stiskalnice ima premera 39 mm in je obremenjena s tlačno silo 60 kN. V prečnem prerezu batnice S nastane tlačna napetost
σπ
= =⋅⋅
≈FS
60000 439
502
Nmm
N / mm22
Batnica pritiska na površino A, ki je med čelom batnice in podlogo s površinskim tlakom:
p FA
= = =60
1252
kN cm
kN / cm2
Površina čela batnice-podloge
A d=
⋅=
⋅≈ ≈
π π2 2
43 9
412 1200, cm cm mm
22 2
V enačbah pomeni črka S površino prereza pri izračunu tlačne napetosti v batnici in črka A čelno površino batnice pri izračunu površinskega tlaka.

67
Za nadaljnji izračun primera hidravličnega valja izberemo iz priročnika podatke za natezno trdnost materiala, kot je splošno konstrukcijsko jeklo St 50-2 (oznaka DIN). Tako je Rm = 300 N/mm2. Izračunana tlačna napetost v batnici je 50 N/mm2. Ker poznamo napetost v materialu in podatek za natezno trdnost materiala, lahko izračunamo varnostni faktor
ν = = =Rsm 300 N / mm
50 N / mm
2
2 6
Visok varnostni faktor ni posledica izbire prevelikega prereza batnice v primerjavi s tlačno napetostjo v njej, ampak upoštevanja uklonske napetosti v batnici in varnosti proti njenemu uklonu. Primer za natezno napetost Vlečni drog je iz materiala St 37-2, natezne trdnosti Rm = 240 N/mm2 in okroglega premera 10 mm, obremenjenega z natezno silo 9,4 kN.
Natezna napetost v palici je σπ
=⋅⋅
=⋅
⋅=
Fd
4 9400 410 3142 2 ,
120 N / mm2
Varnostni faktor je νσ
= = =Rm 240 N / mm
120 N / mm
2
2 2
Pomembno je vedeti, da površina prereza predmeta narašča s kvadratom premera, ali da dvakrat povečani premer nosilnega predmeta poveča površino nosilnega predmeta za štirikrat. Povečanje začetnega premera za 41 % ( )d d1 2= ⋅ prispeva dvakratno povečanje površine
prereza, kot tudi dvojno nosilnost predmeta (velja za nateg, tlak in strig).
Prestavno razmerje in prenos pri mehanskih prenosnikih vrtilnih gibanj
Mehanski strojni elementi prenašajo sile in pri tem spreminjajo tudi njihovo smer, še pomembnejše pa je, da spreminjajo tudi njihovo velikost. Pri tem velja zlato pravilo mehanike: kar pri prenosu sile pridobimo na velikosti (povečanju sile), toliko izgubimo pri času, ki se podaljša in poti, ki se skrajša. Temelj te misli nazorno prikažemo z matematiko in geometrijo prenosa na dvoročičnem vzvodu. Dvoročični vzvod prenaša vlečno silo F1 na dolžini vzvoda r1 čez vrtišče vzvoda na ročico r2, ki na nasprotni strani vrtišča deluje na vzvod z natezno silo F2. Pri tem se spremeni ta velikost sile in smer njenega delovanja, vendar ni pri tem nič podarjenega. Na obeh straneh vrtišča so vrtilni momenti enaki (slika 58): M F r= ⋅
F r F r FF r
r1 1 2 2 21 1
2
500⋅ = ⋅ → =⋅
=⋅
=100 N 60 cm
12 cm N
Povezanost razložimo tudi z geometrijo, kajti vrtilni moment M F r= ⋅ je enak površini A F r= ⋅ . Obe površini sta enaki.
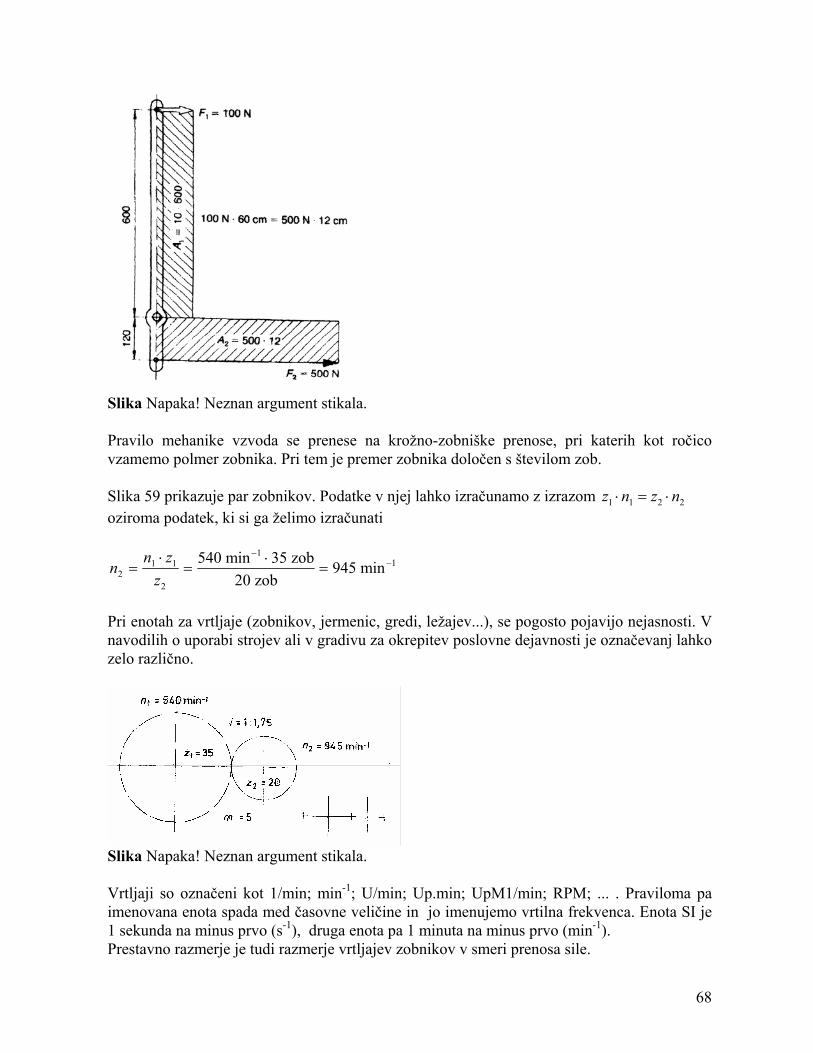
68
Slika Napaka! Neznan argument stikala. Pravilo mehanike vzvoda se prenese na krožno-zobniške prenose, pri katerih kot ročico vzamemo polmer zobnika. Pri tem je premer zobnika določen s številom zob. Slika 59 prikazuje par zobnikov. Podatke v njej lahko izračunamo z izrazom z n z n1 1 2 2⋅ = ⋅ oziroma podatek, ki si ga želimo izračunati
nn z
z21 1
2
=⋅
=⋅
=−
−540 min 35 zob20 zob
945 min1
1
Pri enotah za vrtljaje (zobnikov, jermenic, gredi, ležajev...), se pogosto pojavijo nejasnosti. V navodilih o uporabi strojev ali v gradivu za okrepitev poslovne dejavnosti je označevanj lahko zelo različno.
Slika Napaka! Neznan argument stikala. Vrtljaji so označeni kot 1/min; min-1; U/min; Up.min; UpM1/min; RPM; ... . Praviloma pa imenovana enota spada med časovne veličine in jo imenujemo vrtilna frekvenca. Enota SI je 1 sekunda na minus prvo (s-1), druga enota pa 1 minuta na minus prvo (min-1). Prestavno razmerje je tudi razmerje vrtljajev zobnikov v smeri prenosa sile.

69
inn
= = = =−
−1
2
540 min945 min
11,75
0,571
1
Če je razmik med gredmi velik, uporabljamo za spremembo vrtljajev - vrtilnega momenta -tudi verižne prenose. Na sliki 60 je verižni prenos, pri katerem premer verižnika izračunamo z uporabo podatka o številu zob in z isto enačbo kot v prejšnjem primeru.
n d n d nn d
d1 1 2 2 21 1
2
⋅ = ⋅ → =⋅
=⋅
=− −
−1000 min 350 min180 mm
1994 min1 1
1
inn
= = = =−
−1
2
1000 min1994 min
11,94
0,5151
1
Slika Napaka! Neznan argument stikala. Enake skice uporabljamo za prenose vrtilnih gibanj, ki so prikazani pod oznakami a, b in c. Prenos vrtilnih gibanj in označevanje na skicah je a) ploščati jermen b) klinasti jermen c) verižnik Vlečna sila v jermenu je na vlečni strani gonila enaka, vrtilni moment je pa v razmerju polmerov jermenic oziroma se glede na prestavno razmerje zmanjša ali poveča. Če je vrtilni moment gonilne jermenice 80 Nm s pomočjo izraza M r M r1 1 2 2⋅ = ⋅
dobimo, da je vrtilni moment gnane jermenice
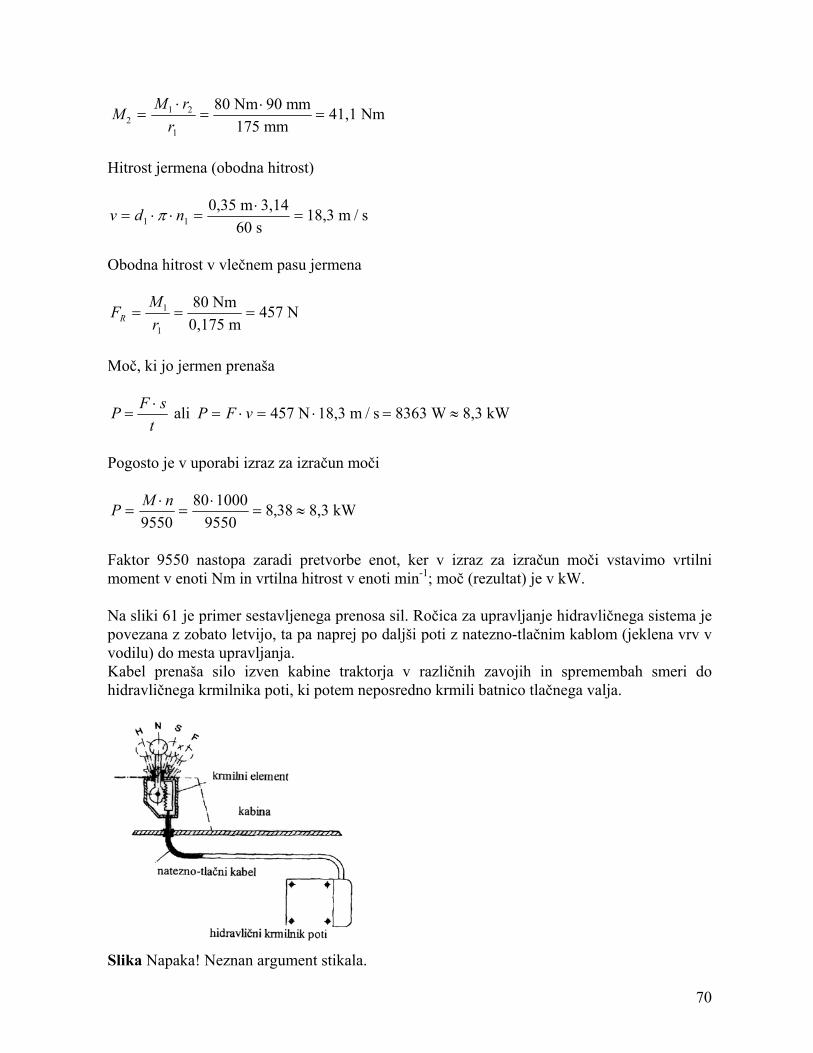
70
MM r
r21 2
1
=⋅
=⋅
=80 Nm 90 mm
175 mm41,1 Nm
Hitrost jermena (obodna hitrost)
v d n= ⋅ ⋅ =⋅
=1 1π 0,35 m 3,1460 s
18,3 m / s
Obodna hitrost v vlečnem pasu jermena
FMrR = = =1
1
80 Nm0,175 m
457 N
Moč, ki jo jermen prenaša
P F st
=⋅ ali P F v= ⋅ = ⋅ = ≈457 N 18,3 m / s 8363 W 8,3 kW
Pogosto je v uporabi izraz za izračun moči
P M n=
⋅=
⋅= ≈
955080 1000
95508 38, 8,3 kW
Faktor 9550 nastopa zaradi pretvorbe enot, ker v izraz za izračun moči vstavimo vrtilni moment v enoti Nm in vrtilna hitrost v enoti min-1; moč (rezultat) je v kW. Na sliki 61 je primer sestavljenega prenosa sil. Ročica za upravljanje hidravličnega sistema je povezana z zobato letvijo, ta pa naprej po daljši poti z natezno-tlačnim kablom (jeklena vrv v vodilu) do mesta upravljanja. Kabel prenaša silo izven kabine traktorja v različnih zavojih in spremembah smeri do hidravličnega krmilnika poti, ki potem neposredno krmili batnico tlačnega valja.
Slika Napaka! Neznan argument stikala.
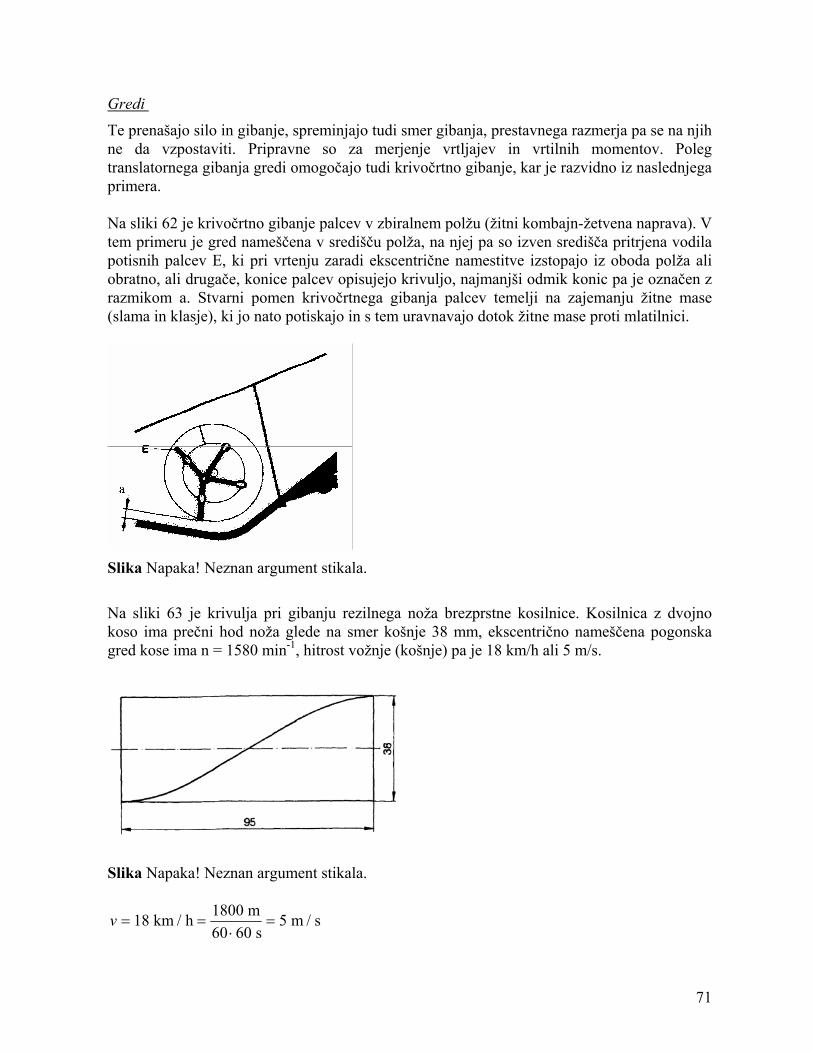
71
Gredi
Te prenašajo silo in gibanje, spreminjajo tudi smer gibanja, prestavnega razmerja pa se na njih ne da vzpostaviti. Pripravne so za merjenje vrtljajev in vrtilnih momentov. Poleg translatornega gibanja gredi omogočajo tudi krivočrtno gibanje, kar je razvidno iz naslednjega primera. Na sliki 62 je krivočrtno gibanje palcev v zbiralnem polžu (žitni kombajn-žetvena naprava). V tem primeru je gred nameščena v središču polža, na njej pa so izven središča pritrjena vodila potisnih palcev E, ki pri vrtenju zaradi ekscentrične namestitve izstopajo iz oboda polža ali obratno, ali drugače, konice palcev opisujejo krivuljo, najmanjši odmik konic pa je označen z razmikom a. Stvarni pomen krivočrtnega gibanja palcev temelji na zajemanju žitne mase (slama in klasje), ki jo nato potiskajo in s tem uravnavajo dotok žitne mase proti mlatilnici.
Slika Napaka! Neznan argument stikala.
Na sliki 63 je krivulja pri gibanju rezilnega noža brezprstne kosilnice. Kosilnica z dvojno koso ima prečni hod noža glede na smer košnje 38 mm, ekscentrično nameščena pogonska gred kose ima n = 1580 min-1, hitrost vožnje (košnje) pa je 18 km/h ali 5 m/s.
Slika Napaka! Neznan argument stikala.
v = =⋅
=18 km / h 1800 m60 60 s
5 m / s

72
Čas, potreben za en hod noža (nož pri enem vrtljaju pogonske gredi kose, opravi dva hoda)
t tn1 2
=⋅
=⋅⋅
=1 60 s2 1580
0,019 s
V smeri košnje nož v tem času opravi pot
s v t1 1= ⋅ =⋅
= =5 m 0,019 s
s0,095 m 9,5 cm
Vsaka točka noža pri enem prečnem premiku noža opiše sinusoido.
Trenje
V mehaniki ima trenje tako negativen kot pozitiven pomen. Z različnimi ležaji in gladkimi drsnimi površinami mu nasprotujemo, s tem pa povečujemo mehanski izkoristek naprave in omejujemo segrevanje drsno-kotalnih površin, posledico pretvarjanja mehanske energije v toplotno. Toda po drugi strani je denimo torna sklopka ravno nasproten primer, saj vrtilnega momenta sploh ne more prenašati, če med stičnimi površinami tornih plošč ni trenja. Isti pomen imata trenje pri prenosu vrtilnega momenta traktorjevega pogonskega kolesa in pretvorba v vlečno silo traktorja. Tudi podporno in pogonsko kolo sejalnice s pomočjo trenja poganja izmetala ali sejalne plošče v njej. Skratka, trenje je dejansko pojav, ki nam poleg vrste drugih parametrov omogoča pretvorbo mehanske energije v vlečno silo. Trenje kot pojav je v bistvu odpor proti drsenju dveh teles, ki se dotikata s ploskvami. Na ta odpor vpliva torni količnik μ, ki ga določimo eksperimentalno. Sila FN deluje pravokotno na podlago - torno ploskev (slika 64). Med ploskvama nastane torna sila Ft, ki se prenese na vzmet. Torni količnik lahko izmerimo in določimo tudi s preprostim merilnikom:
torni kolinorma a sila
čnik = sila trenjaln
ali: μ =FF
t
N
Slika Napaka! Neznan argument stikala.

73
Na zavorni element (ploščico) deluje sila FN = 800 N pri tornem količniku μ = 0,6. Na zavornem disku nastane sila trenja: F F m 800 N 0,6 480 Nt N= ⋅ = ⋅ =
Zgled Napaka! Neznan argument stikala.
Na sliki 65 je zveza med hitrostjo, časom in pojemkom. Traktor vozi s hitrostjo 18 km/h ali 5 m/s. Voznik zmanjšuje hitrost v razmerju z intenzivnostjo zaviranja. Zmanjšanje hitrosti imenujemo tudi pojemek V našem primeru se traktor po dveh sekundah ne giblje več. Pojemek je:
a vt
= =⋅
=5 ms 2 s
2,5 m / s2
Slika Napaka! Neznan argument stikala. V drugem primeru traktor zavira s pojemkom a = 1,1 m/s2, pri čemer je potreben čas zaviranja do zaustavitve:
t va
= =⋅
⋅≈
5 m ss 1,1 m
4,5 s2
Prevožena pot med zaviranjem oziroma zavorna pot je
s v t=
⋅=
⋅⋅
=2
5 m 4,5 ss 2
11,3 m
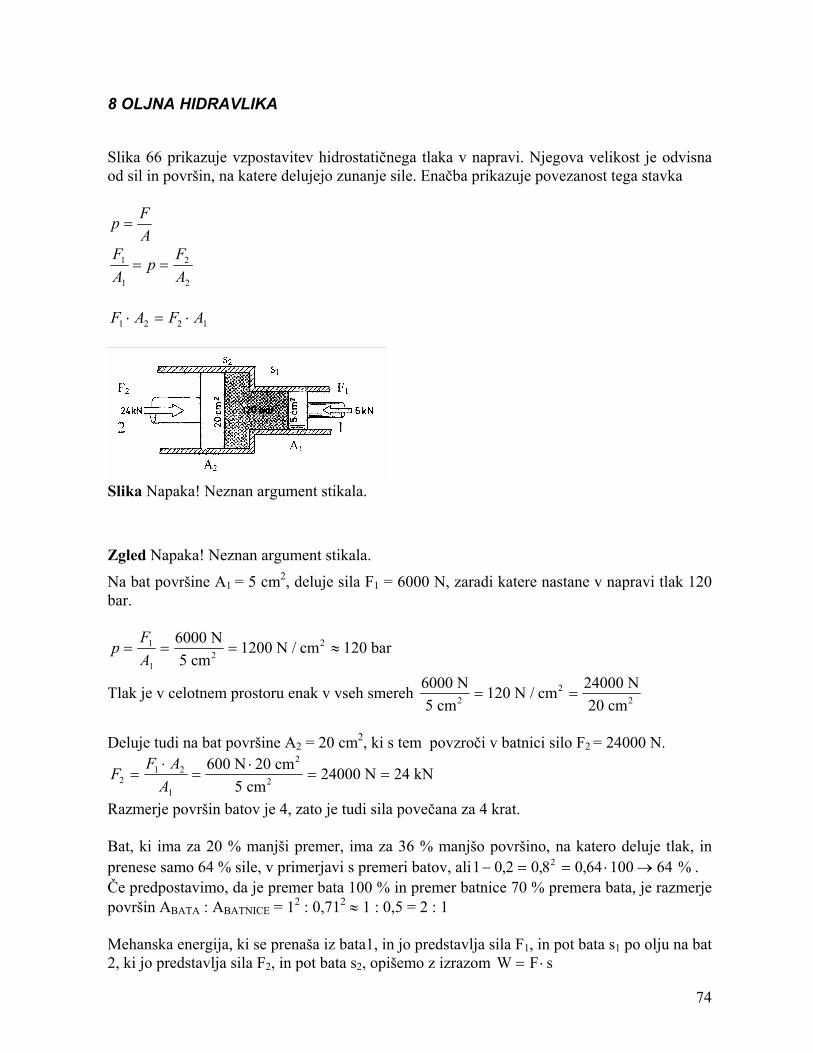
74
8 OLJNA HIDRAVLIKA
Slika 66 prikazuje vzpostavitev hidrostatičnega tlaka v napravi. Njegova velikost je odvisna od sil in površin, na katere delujejo zunanje sile. Enačba prikazuje povezanost tega stavka
p FA
=
FA
p FA
1
1
2
2
= =
F A F A1 2 2 1⋅ = ⋅
Slika Napaka! Neznan argument stikala.
Zgled Napaka! Neznan argument stikala.
Na bat površine A1 = 5 cm2, deluje sila F1 = 6000 N, zaradi katere nastane v napravi tlak 120 bar.
pFA
= = = ≈1
1
6000 N5 cm
1200 N / cm 120 bar22
Tlak je v celotnem prostoru enak v vseh smereh 6000 N5 cm
120 N / cm 24000 N20 cm2
22= =
Deluje tudi na bat površine A2 = 20 cm2, ki s tem povzroči v batnici silo F2 = 24000 N.
FF A
A21 2
1
=⋅
=⋅
= =600 N 20 cm
5 cm24000 N 24 kN
2
2
Razmerje površin batov je 4, zato je tudi sila povečana za 4 krat. Bat, ki ima za 20 % manjši premer, ima za 36 % manjšo površino, na katero deluje tlak, in prenese samo 64 % sile, v primerjavi s premeri batov, ali1 0 2 0 8 0 64 100 642− = = ⋅ →, , , % . Če predpostavimo, da je premer bata 100 % in premer batnice 70 % premera bata, je razmerje površin ABATA : ABATNICE = 12 : 0,712 ≈ 1 : 0,5 = 2 : 1 Mehanska energija, ki se prenaša iz bata1, in jo predstavlja sila F1, in pot bata s1 po olju na bat 2, ki jo predstavlja sila F2, in pot bata s2, opišemo z izrazom W F s= ⋅

75
Iz predstavljenega primera izračunamo pot bata 2, če predpostavimo, da je pot bata 1 enaka s1 = 16 cm je ob danih silah na batih pot s2 enaka
F s F s sF s
F1 1 2 2 21 2
2
⋅ = ⋅ → =⋅
=⋅
=6000 N 16 cm
24000 N4 cm
Bat 2 se pomakne samo za 4 cm F s F s1 1 2 2⋅ = ⋅ ↔ ⋅ = ⋅ 6 kN 16 cm 24 kN 4 cm Prostorninski pretok qv izračunamo iz prostornine valja V, površine bata A, poti bata s, hitrosti bata v in časa t.
q Vt
A st
A vv = =⋅
= ⋅
V danem primeru je površina bata 5 cm2, hitrost gibanja bata 2 m/min ali 0,033 m/s, pri čemer je prostorninski pretok olja:
q A vv = ⋅ =⋅
= = =5 cm 2000 cm
min10000 cm / min 10 dm / min 10 l / min
22 3
Za izračun hitrosti toka olja v cevi prereza A = 1 cm2 uporabimo enačbo
q A v vqAv
v= ⋅ → = = = = ≈10000 cmmin1 cm
10000 cm / min 100 m / min 1,67 m / s3
2
Sestava dvosmerno delujočega hidravličnega valja (slika 67):
1 - ohišje hidravličnega valja 2 - batnica 3 - bat 4 - zgornji in spodnji okrov hidravličnega valja 5 - tesnila Slika Napaka! Neznan argument stikala.

76
Zgled Napaka! Neznan argument stikala.
Premer bata je 50 mm, premer batnice je 25 mm, obratovalni tlak v hidravlični napravi je 170 bar, prostorninski pretok olja je 28 l/min. Površina bata na strani A1 je enaka
A1 4=
⋅=
50 mm 1962,5 mm2
2π
Površina bata B1 na strani batnice je enaka
( ) ( )[ ]B1 4
=− ⋅
=50 mm 25 mm
1471,9 mm2 2
2π
Sila F1 v batnici, ko tlak deluje na celotno površino bata F A p1 1= ⋅ = ⋅ =19,6 cm 170 bar 33320 N2 Sila F2 v batnici, ko obratovalni tlak deluje na strani batnice F B p2 1= ⋅ = ⋅ =14,7 cm 170 bar 24990 N2 Ko obratovalni tlak deluje na strani batnice, je sila v batnici manjša za 8330 N. Pri enakem prostorninskem pretoku olja in gibanju batnice naprej (iz valja) ali nazaj (v valj), je gibanje batnice iz hidravličnega valja zaradi večje površine bata počasnejše. Pri gibanju v obratni smeri je pojav ravno nasproten, kar pomeni večjo hitrost zaradi manjše površine bata pri istem prostorninskem pretoku olja. Hitrost gibanja batnice iz valja
vqA
v1
1
= = =28000 cm
19;6 cm min1428 cm / min
3
2
Hitrost gibanja batnice v valj
vqB
v2
1
= = =28000 cm
14,7 cm / min1904 cm / min
3
2
Povratno gibanje batnice v valj je za 476 cm/min hitrejše. Pomen vgradnje analiziranega valja ima pri raznovrstnih nakladalnikih, kjer je v delovni smeri (iz valja) gibanja batnice pri zajemanju potrebna velika sila. Pri praznjenju v obratni smeri pa večja hitrost izpraznjevanja nakladalca in manjša potrebna sila v batnici.

77
Slika Napaka! Neznan argument stikala.: Osnovna sestava hidrostatičnega prenosa
Prostorninski tok olja, ki ga ustvarja pogonski motor črpalke, napeljemo v hidromotor, kjer se hidrostatična energija pretvarja v mehansko (Napaka! Neznan argument stikala.).
Zgled Napaka! Neznan argument stikala.
Predpostavimo, da je v hidravlični napravi vgrajena batna črpalka, s površino bata A, hodom bata h in številom delovnih batov n. Prostorninski pretok je q A h n V n
v1 1 1 1 1 1= ⋅ ⋅ = ⋅ V - prostornina, ki jo črpalka izrine pri enem vrtljaju gredi (specifični volumen črpalke) Vrtilni moment na gredi črpalke je
T V p1
1
2=
⋅⋅π
Potrebna moč za pogon črpalke P T q pv1 1 1 1= ⋅ = ⋅ω V hidravlični motor dovajamo hidrostatično energijo, iz njega pa odvajamo mehansko energijo. Ob predpostavki, da nimamo prostorninskih izgub olja, izračunamo potrebno količino olja za hidromotor q A h n V nv2 2 2 2 2 2= ⋅ ⋅ = ⋅ Vrtljaji hidromotorja
n qV
v2
2
2
=
78
Vrtilni moment hidromotorja
T V p2
2
2=
⋅⋅Δπ
Δp - razlika tlakov, ki je izračunana iz tlaka pred vstopom v hidromotor in tlaka pri izstopu iz hidromotorja. Moč hidromotorja P T q pv2 2 2 2= ⋅ = ⋅ω Δ








![NATURAL SCIENCES D568/12 ADMISSIONS ASSESSMENT 40 … · Ω, 2 Ω, 4 Ω, 8 Ω, 16 Ω, 32 Ω, 64 Ω, … connected in parallel with the cell. ... [2 marks] Answer: ... is used as the](https://img.pdfslide.net/doc/110x75/5f2363f7b03d7e4ce06bc15b/natural-sciences-d56812-admissions-assessment-40-2-4-8-16-32.jpg)











![LABORATÓRIO DE SISTEMAS MECATRÔNICOS E ROBÓTICA ] - LAB.pdf · Resistores - 1,0 Ω - 100k Ω 1,2 Ω - 120k Ω 1,5 Ω - 150k Ω 1,8 Ω- 180k Ω 2,2 Ω– 220k Ω 2,7 Ω– 270k](https://img.pdfslide.net/doc/110x75/5c245c1a09d3f224508c4b48/laboratorio-de-sistemas-mecatronicos-e-robotica-labpdf-resistores-.jpg)







