Embed Size (px)
Citation preview

196 IEEE TRANSACTIONS ON RELIABILITY, VOL. 41, NO. 2, 1992 JUNE
Usefulness of MTTF of s-Independent Case in Other Cases
Winfrid G. Schneeweiss, Senior Member IEEE Fernuniversitiit, Hagen
Key Words - MTTF, Statistical dependence, k-out-of-n:F Markov system
Reader Aids - Purpose: Deepen the understanding of statistical dependence Special math needed for explanations: Markov model Special math needed to use results: Mean failure-frequency calcu-
Results useful to: Reliability analysts for k-out-of-n:F systems lations in typical fault-tree analysis
Abstract - It is a plausible conjecture that for many cases of statistical dependence, the system MTTF (mean t i e to failure) is nearly that for statistically independent components . This paper deals with Markov k-out-of-n:F systems, for which the degree to which the above conjecture is true, could be clarified satisfactori- ly. In order to get an approximate value of system unavailability too, it is necessary to find an approximate value of MTTR. This was easy for the above special systems, but can be difficult in general. Mainly, it can be shown that the approximate system MTTF found from the easily calculated mean failure-frequency of the statistically independent case is also useful for certain cases of statistical dependence.
1 . INTRODUCTION
The ease of fault-tree analysis of repairable systems com- pared to Markov model analysis, is well known. However, as
Section 2 determines the transition rates of s-independent k-out-of-n:F systems. Section 3 shows which k-out-of-n:F systems have the MTTF for s-independent components. Sec- tion 4 searches for k-out-of-n:F systems whose MTTF is ap- proximately that in the case of s-independence. This section is limited for practical reasons to the cases k = 1,2,3, viz, to system tolerating 0,1,2 faults, respectively. Details of the Markov analysis of such systems are given in the appendix. Sec- tion 5 contains some conclusions in addition to those mentioned in the Abstract.
Notation
n number of components in the system i index Ai, Vi availability, unavailability of component i Ak,n, uk,n availability, unavailability of k-out-of-n:F system aih failure rate, equals Xi,i+ in standard Markov analysis bip repair rate, equals Xi+ l , i in standard Markov analysis k minimum number of components faulty in a faulty
system L,FL(t) life (time) and Cdf of L Vk,n mean failure frequency of k-out-of-n:F system Pi=Pi( t ) probability of (Markov) state i at t Pl+ P n s) Laplace transform of Pi ( t )
S system (index)
Other, standard notation is given in “Information for Readers & Authors’’ at the rear of each issue.
S variable of the Laplace transform
Dejnitions far as the determination of system MTTF (MTBF) is concern- ed, this is only true for s-independent (binary) component states
insufficient (poor) repair, such that queues of components
an approximate dependability analysis, yielding system unavailability and MTTF (in the older literature, MTBF) can be based on the plausible fact that with fairly “good” systems only the MTTR, but not the MTTF, is affected strongly by the
’. s-(in)depndent whose [4]. In practice such s-dependence is often exclusively due to state indicator are stochastically
are always for (in)dependent.
steady-state* 3. A -t
waiting for repair can occur. Now, one could conjecture that 2 . A* and
for any index.
usual Assumptions quality of maintenance, such that system MTTF can be calculated for ideal repair as is assumed with s-independent com- ponents, and an approximate value of system unavailability is
proximate value of MTTR found by some ad-hoc reasoning. The only little problem one has to master is the paradox that
1. h <( p, ie, the repair rate of any component is very much higher than its failure rate. (For a motor car, counting driving-
hardware of your PC excepting the disks, this may mean p = 104.X.) Hence for s-independent components the following ap-
found via the above approximate value of MTTF and an ap- time Only, this may mean p = 102‘h; for eg, the
the approximate MTTF is found by evaluating unavailability proximation for is meaningfu1:
of the-s-independent case. This investigation is limited to Markov models, since on-
ly in this domain are exact results for systems with s-dependent components readily available. Moreover, only k-out-of-n: F systems with n equal components are investigated.
U = -k A ) 5:
2 . aiX 4 bip, ie, the rate of change of the probability of state i is almost completely determined by repair activities.
0018-9529/92$03.00 01992 IEEE

197 SCHNEEWEISS: USEFULNESS OF MTTF OF S-INDEPENDENT CASE IN OTHER CASES
2 . MARKOV MODEL TRANSITION RATES FOR k-out-of-n: F SYSTEMS WITH
INDEPENDENT COMPONENTS
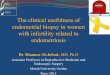
Any k-out-of-n:F system with repair can be modeled by the state transition graph of figure 1 , where the transition rates concern the Markov model. An obvious question is: Which set(s) of coefficients a l , . . . ,a&,.. . ,bn belong to the case of s- independence. The (possibly simplistic) criterion used in this paper is, "s-independence is equivalent to: (1) holds".
system good
............. B.. b, :. r FI .'1 .. 11, U
1 (2v) .............
%
all coIll~loIlcIl1s gO"d
exac t ly 1 component bad
exac t ly 2 conipoiieiits bad
: ' i J
............. exac t ly k - l components bad
((n-k+ a k '' I )? , ) y.;:;;) s y s t e m
bad 1 Figure 1.
............. exactly k conipoiierits bad
I '5
' I
Markov Graph of a k-out-of-n:F System [Rates in parentheses concern s-independence of components. ("Fat" partial graph is needed in sec- tion 3)]
In order to find (the question here) a set of ul , . . . ,a&,. . . ,b,, for which (1) holds, we quickly solve the Markov model's first n differential equations:
+ b i . p . P i + l , for i=2, ..., n; (3)
in the stationary case together with the normative equation:
P1 + ... + P,+l = 1. (4)
It is easily shown (by induction) that:
Pj(00) = [(al . ... .ai-l.h'- ')/(bl.. . . .bi-l.pi-l)]
.P1(m), for i = 2 ,..., n + l . ( 5 )
Hence, by (4)
n
Pi(00) = [1 + (al. . . : ~ j h ' ) / ( b l . . . : b ~ p ~ ) ] - ~ (6) i = l
Obviously, (1) is true i f
Clearly, for:
(7) ai = n + 1 - i ,bi = i ,
by definition of (;),
Hence (7) is a sufficient condition for (1) to hold true; see also rates in parentheses in figure 1 .
3. k-out-of-n:F SYSTEMS WHOSE MTTF IS THE SAME AS FOR INDEPENDENT COMPONENTS
By the memorylessness of Markov systems, the MTTF of a k-out-of-n:F system is the mean time spent in the upper k states of figure 1, if life starts in state k (with probability 1). Here, system MTTF can be modeled by the mean life of an equivalent system, which is repaired only up to the first system failure. (I found this interesting concept first in [ 11 .) As is well-known [5, p 2251, mean life is the integral of the survivor function:
Hence,
(9)
= PXO) + ... + Pk*(O), (10)
where the PnO) are readily found from the Laplace-trans- formed Markov model (2) - (4). (P,*(O) is not the mean dura- tion of a single stay in state i [4].) Figure l shows in its "fat" part and with the transition rates in the parentheses the Markov graph for k-out-of-n:F systems, whose MTTF equals that for s-independent components. System MTTF is independent of ak+l, ... ,an,bk ,... ,bn; this is rephrased in theorem 1.

198 IEEE TRANSACTIONS ON RELIABILITY, VOL. 41, NO. 2 , 1992 JUNE
Beorem 1. Extended Usefulness of MTTF of Independent Case
Markov-type k-out-of-n:F systems described by (2) - (4) have the MTTF of the s-independent case if the first k failure rates and the first k - 1 repair rates are those of the s-independent case. 0
If one interprets a repair rate valuejp as indicating the ex- istence o f j repair facilities (eg, j people), then from the above:
A k-out-of-n:F system with s-independent failures (with ai as in (7)) has an MTTF as if it were composed of s-independent components, if there are at least k- 1 repair facilities, where one facility can manage one repair at a time.
It is not overly complicated to calculate system MTTF via (10). Appendix 2 shows several examples. For s-independence, however, theorem 2 (known well from classical fault-tree analysis) is much easier.
Beorem 2. Calculation of Mean Failure Frequency [2,5,6]
The mean failure frequency vs of a repairable system S of s-independent components is found by multiplying each term Ui.Uj- ... -Ak-AI- . . . of a polynomial form of system unavailability Us by (pi + p j + ... - Ak - hl - ...). 0
Hence, from the well-known polynomial-type formula:
which checks with (A-8) for al = n,
which checks with (A-l8a),
(15c) MTTF3,, = 2-p2/[n(n- 1) (n-2)A3],
which checks with (A-20a).
4. k-out-of-n:F SYSTEMS WHOSE MTTF IS NEARLY THAT FOR INDEPENDENT COMPONENTS
Almost all of dependability technology is characterized by the fact that precise formulas are not overly important, because the input data (failure & repair rates, etc.) are not very accurate, to say the least [7]. Therefore, a typical question is: Do there exist, beyond the exact results of section 3, other approximate formulas fully sufficient for most practical work? Unfortunately, this appears not to be so with k-out-of-n:F systems, at least for the practically interesting case k = 3.
Since, by definition, for any stationary (repairable) system S
VS = l/[MTTFs + MTTRs], (19) Uk," = binfc(k; U,n), (1 1)
we have, we get
n
binm(i; U , n ) . [ i p - ( n - i ) A ] . i = k
For U Q 1 ( p % A), and moderately large n such that even p $- nh, a good approximation triple of formulas is:
Alternatively, quite practical for k 4 n:
v ~ , ~ = binm(i:A,n).[iX- ( n - i ) p ] . (17) i = n - k + 1
From (! 5) :
This is our "test equation" where the system MTTF is nearly that for s-independent components.
Case k=2. Check of (A-18a)
BY (1 6) 7 (171,
Hence, by (20), and A = p / ( h + p )
If one failed component is repaired, then by our interpretation of the bi, bl = 1, so that we have a case of section 3, ie, the MTTF for poor repair equals that of ideal repair (with no repair queues).
Case k = 3
We can look immediately at approximate results, since even then (20) does not hold. From (A-20) it is obvious that for poor

199 SCHNEEWEISS: USEFULNESS OF MTTF OF S-INDEPENDENT CASE IN OTHER CASES
repair-intensity, viz, for b2= 1 (1 repair man for 2 bad APPENDIX components) :
MTTF3,, = p2/[n(n-1)(n-2)h31,
Markov Model of Repairable Systems Tolerating 0, 1, 2 Faults
(22) A. 1 Availabilitv of k-out-of-n:F Systems
ponents. This does not imply that other cases of (15c) to hold a] ... a$ - I true don’t exist. The corresponding approximate equation [see A ~ , , = p1 (=) = ( I + f: a) * (A-1)
(A-20) & (A-20a)], i= 1
Since as a first order approximation, bl .b2/[al .a2.a3] = 2/[n. (n- 1) - ( n -2)] (23)
= 1 - E ; € 3 1, I 1 + ~ we have, for ajX * bjp, j = 1 , ..., n:
can have numerous “solutions”, eg, quintuples al,a2,a3,bl,b2 to fulfill (23) “approximately”.
5. DISCUSSION OF RESULTS
It has been shown that certain systems with s-dependent components have an MTTF, which equals that of the s- independent case. Specifically, this holds true with k-out-of-n:F Markov systems, if the state transition rates between the good states and the transition rate, between the last “good” and the first “bad” state, are those of the s-independent case. Therefore, for such systems, due to the fact that for relatively high repair rates the failure rate (l/MTTF) is approximately the mean failure frequency l/(MTTF+MTTR), both of these rates can be calculated readily via fault-tree analysis. If also an approximate value of system availability is needed, one can use the fact that system MTTR is roughly the mean time spent in the best of the failure states; see appendix 3.
It could be shown that if the above conditions are not fulfill- ed and s-dependence is due to poor repair (repair queues can exist), then for integer repair coefficients bi<i, the system MTTF cannot be approximated by that of the s-independent case. In fact, extending appendix 2 it can be shown that because of,
2. k = 2 (single faults are tolerated): Obviously,
(A-2)
(A-4)
Since by (A-2) for a = alX/ (b lp) , p = a2.X/(b2.p):
we have for ajh 4 bjp; j = 1, ..., n:
(A-5)
MTTF4,, 5: bl* b2 * b3 * p 3 / [ a l * *a3 * X4], 3. k = 3 (double faults are tolerated): Obviously,
also for k = 4 (tolerance of 3 faults), eg, for a single repair facili- A3.n = ( O0 ) + p2 ( O3 ) -t p3 ( O3 1. (A-6) ty (for bl = b2 = b3 = 1 ) the MTTF of the s-independent case is badly misleading (by a factor of 6).
It is well possible that some of the above results can be extended for more realistic, viz, non-exponentially distributed repair times. However, there is little hope for broader results; rather some important special cases should be investigated by simulation studies.
Similar to the case k=2 above we have for ajX Q bjp, j =
UlU2U3X3 u1u243 x3 (A-7) A3,n 5: 1
A.2 MTTF of k-out-of-n:F Systems
3 ; u3,n 5: _____ blb2b3h btb2b3P3 .
1. k= 1 (no redundancy): As is well-known [4], ACKNOWLEDGMENT
MTTFI,, = l / ( ~ l A ) . (A-8) I appreciate the fruitful discussions with the Associate
Editor and the anonymous referees. Hence with s-independent components,

200 IEEE TRANSACTIONS ON RELIABILITY, VOL. 41, NO. 2, 1992 JUNE
MTTFI,, = l / ( n h ) . (A-8a)
2 . k = 2 (single faults are tolerated): By (see figure 1)
P1 = -alX P1 + b l p P2, (A-9)
P3 = a2X P2, (A-10)
P1 + P2 + P3 = 1 , (A-1 1)
using the differentiation rule of the Laplace transform:
d:{h(t)} = s h * ( s ) - h(O) , (A-12)
and taking into account that P 2 ( 0 ) = 1 - Pl(0) = P 3 ( 0 ) 0; by (A-9):
s + alh p ; = ___ Pf.
bl P
Hence, by (A-lo),
a2X s+alX p ; = - . ~ Pf.
S bl1L
(A-13)
(A-14)
By (A-1 1) and the well-known rule for Laplace transforming constants:
z- blb2P2 ; bip % aih; i = 1,2. (A-20) ala2a3h3
For s-independent components by (7),
MTTF3,, z 2P2 (A-20a) ( n - 1 ) ( n - 2 ) h3 ’
This above results (A-18) & (A-20) are not overly plausible since, due to the fact that most of the time the system is in its very best state 1 , one might conclude that details of repair rates should not matter.
A.3 Approximate Values of MTTR of k-out-of-n:F Systems By basic assumptions MTTR = U.MTTF.
1 . k = l : By (A-2), (A-8),
(A-21) U l X 1 1
blP alh blP
ala2h2 blP
b*b2P2 a1a2X2 b2P
MTTRl,, - - - = -.
2. k=2: By (A-5), (A-18),
(A-22) 1 - MTTR2,, = ___ ~ - -.
PT + P; + P; = l/s,
whence
3. k=3: By (A-7), (A-20), (A-15)
(A-23) ala2a3h3 bl b2p2 1
MTTR3,, = ____ * ____ = -. bib2b3P3 aia2a3h3 b3CL
Pf = b1P (A-16) These results are plausible from figure 1 , since most of the repair time is obviously spent in the “best” failure state, viz, the state with a minimal number of faulty components. Obviously,
s b l p + s(s+alX) + a2h(s+alh) *
P f ( 0 ) = blp / (a la2X2) , P,*(O) = l / (a2h) . (A-17)
Finally, by (10)
alh+blP ala2h2
MTTF2,, = Pf(0) + P;(O) = ____
= b l p / ( a l a 2 h 2 ) ; b l p % alh.
For s-independent components,
(A- 18)
’ ; n X Q p . (A-18a) nX+P ~ MTTF2,, = n ( n - 1 ) P n ( n - 1 ) P
3. k = 3 (two faults are tolerated): Similar to the case k = 2, after a moderate amount of calculations,
1 , P3*(0) = -. blb2p2 , p;(o) = - b2P Pf(0) = ~
a ia2a3 x a 2 a 3 ~ ~ a3X
(A-19)
Finally, by ( lo),
MTTF3,, = P;(O) + P;(O) + P z ( 0 )
- blb2p2 + alb2hp + ala2h2 -
a l a 2 a 3 ~ 3
REFERENCES
[ 11 U. Hdfle-Isphording, Zuverlassigkeits-Rechnung (Reliability Calculus), 1978; Springer (in German).
[2] W. G. Schneeweiss, “Addendum to computing failure frequency, MTBF & MTTR via mixed products of availabilities and unavailabilities”, IEEE Trans. Reliability, vol R-32, 1983 Dec, pp 362-363.
[3] W. G. Schneeweiss, “The failure frequency of systems with dependent components”, IEEE Trans. Reliability, vol R-35, 1986 Dec, pp 512-517.
[4] C. Singh, R. Billinton, System Reliability Modelling and Evaluation, 1977; Hutchinson.
[SI W. G. Schneeweiss, Boolean Functions with Engineering Applications and Computer Programs, 1989; Springer.
[6] C. Singh, “A new method to determine the failure frequency of a complex system”, IEEE Trans. Reliability, vol R-27, 1978 Jan, pp 147-148.
[7] T. BendelJ, “An overview of collection, analysis, and application of reliabili- ty data in the process industries”, IEEE Trans. Reliability, vol 37, 1988 Jun, pp 132-137.
AUTHOR
Dr. W. G. Schneeweiss, Professor; Femuniversiti%t; Postfach 940; D-5800 Hagen 1 Fed. Rep. GERMANY.
Wdrid G. Schneeweiss ”76, SM’83): For biography, see IEEE Trans. Reliability, vol 39, 1990 Aug, p 300.
Manuscript TR90-150 received 1990 August 8; revised 1991 May 28; revised 1991 September 6.
IEEE Log Number 08259 4 T R b
-