-
Validation of a model calibration method through vibrational
testing of a mechanical system with local clearance
Y.Chen1, A. Linderholt1, T. Abrahamsson2, Y. Xia3, M.I.
Friswell4 1 Linnaeus University, Department of Mechanical
Engineering 35195, Växjö, Sweden e-mail: [email protected] 2
Chalmers University of Technology, Department of Applied Mechanics
41296 Göteborg, Sweden 3 University of the West of England,
Department of Engineering Design and Mathematics BS16 1QY, Bristol,
UK 4Swansea University, College of Engineering Swansea SA1 8EN,
UK
Abstract Nonlinear finite element models are often validated
using experimental data. A previously proposed calibration method,
which concerns pre-test planning, multi-sinusoidal excitation and
an effective optimization routine, is improved with an extended
version of the pre-test planning. The improved method is validated
using a test structure with a clearance type nonlinearity. From the
pretest planning, an optimal configuration for the data acquisition
is determined. The multi-harmonic nonlinear frequency response
functions (FRFs) of the structure under test are then generated by
a multi-sinusoidal excitation. Model calibration is conducted by
minimizing the difference between the experimental multi-harmonic
nonlinear FRFs and their analytical counterparts. The uncertainties
of the estimated parameters are assessed by a k-fold cross
validation, which confirm that the uncertainties of the estimated
parameters are small when the optimal configuration is applied.
1 Introduction
All mechanical systems display a certain degree of nonlinearity
due to nonlinear material properties, large displacement,
clearance, etc. In industry, linear finite element (FE) models are
extensively used to represent the global behavior of mechanical
systems, in which nonlinear effects are often neglected to simplify
the model. When test data show significant nonlinear behaviour, the
prediction of a linear FE-model may become erroneous. In this case,
it is essential to take the nonlinearity into account. The
nonlinearities are often localized at boundaries and connections of
mounting interfaces. To present the dynamic behavior of structures
with local nonlinearities, a common approach is to extend linear
FE-models by adding nonlinear elements. The nonlinear parameters
often suffer from a large amount of uncertainty and they must be
calibrated using experimental data. This procedure is called
nonlinear FE-model calibration and has interested researchers in
the field of structural dynamics in the past decades [1-3]. Pretest
planning is a vital part of successful vibrational testing
especially for a complex structure and a limited number of sensors
and actuators. Finding the optimal sensor placement (OSP) is one of
the most important pretest steps, which has been extensively
conducted in modal analysis. Many sensor placement
2581
-
techniques based on the information obtained from the nominal FE
model have been developed [4-6]. The effective independence method
(EFI), based on the Fisher information matrix (FIM), is one of the
most well-known methods to find the OSP. In [4], the FIM is defined
as the product of the modal matrix and its transpose. While much
research has focused on how to best set-up and perform modal
property identification, there has been little discussion on
pretest planning for nonlinear system identification. In [7], the
OSP algorithm, based on principal component analysis, has been
applied for the detection of nonlinear structural behaviour. The
measured responses of a nonlinear system depend not only on the
placement of sensors and actuators but also on the excitation
levels and the excitation frequency range. Therefore, they should
be carefully selected to obtain the most important dynamic
information for nonlinear model calibration. In this paper, the
previously proposed model calibration method [8] is improved by
selecting an optimal configuration, involving the location of the
sensors and actuators, the excitation levels and the frequency
ranges, ranked by the FIM. The nonlinear model calibration method
consists of three parts; the pretest planning, multi-harmonic
excitation and an efficient optimization routine. The pretest
planning gives a test design for measurements and forms a
calibration metric for the optimization. The optimization is
conducted by minimizing the difference between the calculated and
measured multi-harmonic nonlinear FRFs using a selected starting
point. To calculate the steady-state response, the time domain
method may be inefficient for a lightly damped system; therefore
the frequency domain multi-harmonic balance (MHB) method [9-11] is
used here to calculate the numerical nonlinear FRFs. The
implementation and experimental verification of the proposed model
calibration method are demonstrated on a test structure with a
clearance nonlinearity.
2 Model calibration method
The previously proposed model calibration method [8], which
requires pretest planning, uses a multi-sinusoidal excitation and
an effective optimization routine. The pretest planning part of the
calibration method is extended in this paper, which is shown in
section 2.1. To increase the accuracy of the prediction of the
locally nonlinear model representing the nonlinear dynamics of the
structure under test, the calibration is here divided into two
phases; first a calibration of the underlying linear system (linear
calibration) and then a calibration of the nonlinear part
(nonlinear calibration). The linear part of the model is assumed to
be captured after the linear calibration. Only the parameters
representing nonlinear elements are then calibrated in the
nonlinear calibration phase. The nonlinear calibration consists of
the pretest planning, the measurements and model
calibration/validation. In the pretest planning, the parameter
identifiability is examined by use of the FIM and correlation
indices. A test design for the measurements and a calibration
metric for the optimization are defined. Multi-harmonic frequency
response test data are then generated using a multi-sinusoidal
excitation. Finally, a parameter starting point, selected among
starting point candidates found by the Latin hypercube sampling
method, is used for calibration and the optimal parameter setting
found from the calibration is used as the starting point for a
Ƙ-fold cross validation from which uncertainties of the parameters
calibrated are obtained. The improved version of the previously
proposed model calibration method is systematically shown in Fig.
1.
2582 PROCEEDINGS OF ISMA2016 INCLUDING USD2016
-
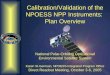
Figure 1: An overview of the nonlinear model calibration
process
2.1 Pretest planning
Generally, the aim of a pretest planning is to increase the
likelihood of achieving valuable data from the tests planned. Such
data maximize the identifiability of the uncertain model
parameters. At this stage, the experimental data are not available
and the baseline FE-model representing the test object has to be
used in the pretest planning.
2.1.1 The extended pretest planning framework
For a nonlinear system, steady-state frequency response data
depend on the excitation levels. It is computationally expensive to
calculate or measure the nonlinear FRFs within a broad frequency
range and frequency ranges where the nonlinear behaviour is not
pronounced may be considered as non-informative with respect to the
nonlinear parameters. Therefore, it is desirable to use a narrow
and informative excitation frequency range for model calibration.
The previously proposed pretest planning method mainly concerned
the selection of excitation levels and frequency ranges [8]. Due to
the limitations in number of sensors and actuators to be used,
their configurations should also be considered in the pretest
planning. In this paper, the four variables considered in the
pretest planning are the actuator positions, the sensor locations,
the excitation levels and the excitation frequency ranges.
Examining all the possible combinations which can be used in the
tests, removing one data set at a time, and recalculating the FIM
based on the remaining data sets, is sub-optimal, and may result in
measuring more data than necessary in the calibration. To use
measured data more efficiently, the optimal configuration is found
by three procedures:
2.1 Pretest planning 2.2 Measurements
2.3 Model calibration / validation
Latin hypercube sampling Calibration Ƙ-fold cross-validation
Calibrated locally nonlinear FE-model with parameter
uncertainties
Baseline FE model Structure under test
1. Calibration of the underlying linear part
2. Calibration of the nonlinear part
Parameter identifiability Correlation indices Fisher information
matrix
Multi-sinusoidal excitation Test
design
Test data
Calibration metric
NON-LINEARITIES: IDENTIFICATION AND MODELLING 2583
-
1. Select candidates for actuators, sensors, frequency ranges
and excitation levels. 2. Combine the candidates from all the
variables to obtain the number of the possible configurations. 3.
Calculate the resulting FIM for each candidate configuration. The
configuration that results in the FIM which has the largest
determinant is considered as the optimum. An overview of the
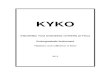
pretest planning procedure is shown in Fig. 2.
Figure 2: An overview of the pretest planning procedure
2.1.2 Calculation of the FIM
Assume that the test data 𝒛𝒛𝑛𝑛 can be predicted without bias
with a parameterized model in its calibrated setting 𝑷𝑷∗. In
addition, assume a stationary, Gaussian residual 𝜺𝜺𝑛𝑛, with known
and identical standard deviation 𝜎𝜎𝑛𝑛 for all entries. Let the
predicted data from the model be 𝒛𝒛�𝑛𝑛, then the test data can be
presented as
𝒛𝒛𝑛𝑛 = 𝒛𝒛�𝑛𝑛(𝑷𝑷∗) + 𝜺𝜺𝑛𝑛 (1)
The covariance matrix of the estimation error
𝜮𝜮 = 𝐸𝐸[(𝒛𝒛𝑛𝑛 − 𝒛𝒛�𝑛𝑛)(𝒛𝒛𝑛𝑛 − 𝒛𝒛�𝑛𝑛)T] (2)
should be small for the test data to be valuable. The inverse of
the lower bound of the covariance matrix is known as the FIM, 𝓕𝓕,
and can be expressed as
𝓕𝓕 = 𝜮𝜮−1 = �𝜎𝜎𝑛𝑛−2 �𝜕𝜕𝜕𝜕𝑷𝑷
𝒛𝒛�𝑛𝑛(𝑷𝑷)� �𝜕𝜕𝜕𝜕𝑷𝑷
𝒛𝒛�𝑛𝑛(𝑷𝑷)�T𝑁𝑁
𝑛𝑛=1
(3)
The derivation of Eq. (3) can be found in [12]. The FIM is
useful in the study of data informativeness and parameter
identifiability and it is here used to rank the usefulness of data
sets.
2.2 FRFs of a multi-harmonically excited structure
The governing equation of an N degrees of freedom nonlinear
mechanical system can be expressed as
𝑛𝑛A 𝑛𝑛S 𝑛𝑛F 𝑛𝑛E No. of candidates
𝑛𝑛A ∙ 𝑛𝑛S ∙ 𝑛𝑛F ∙ 𝑛𝑛E
No. of the possible configurations
Optimal configuration
Ranked by det(FIM)
Actuators Sensors Frequency ranges Excitation levels
2584 PROCEEDINGS OF ISMA2016 INCLUDING USD2016
-
𝑴𝑴�̈�𝒒 + 𝑽𝑽�̇�𝒒 +𝑲𝑲𝒒𝒒 + 𝒇𝒇NL(𝒒𝒒, �̇�𝒒) = 𝒇𝒇 (4)
where M, K and V are the N× N mass, stiffness and damping
matrices, 𝒒𝒒, �̇�𝒒, �̈�𝒒 are the nodal displacement, velocity and
acceleration vectors, 𝒇𝒇NL denotes the nonlinear force vector and
𝒇𝒇 is the external load vector. The excitation force, at degree of
freedom (DOF) j, is designed to have harmonics of the fundamental
frequency 𝛺𝛺, and can be expressed as
𝑓𝑓𝑗𝑗(𝑡𝑡) = Re��𝐹𝐹𝜐𝜐𝑒𝑒𝜐𝜐𝜐𝜐Ω𝑡𝑡𝜐𝜐�
𝜐𝜐=1
+ �𝐹𝐹1 𝜐𝜐⁄ 𝑒𝑒𝜐𝜐Ω𝑡𝑡 𝜐𝜐⁄𝜐𝜐
𝜐𝜐=2
�
(5)
where Re denotes the real part, 𝐹𝐹𝜐𝜐 and 𝐹𝐹1 𝜐𝜐⁄ are complex
numbers, and (υ� − 1) and �𝜐𝜐 − 1� are the number of super-harmonic
and sub-harmonic components included in the excitation force. The
periodic steady-state time response at DOF 𝑖𝑖, if such exists, can
be approximated as the series
𝑞𝑞𝜐𝜐(𝑡𝑡) = Re�� 𝑄𝑄𝜐𝜐𝑒𝑒𝜐𝜐𝜐𝜐Ω𝑡𝑡𝑁𝑁�
𝜐𝜐=1
+ �𝑄𝑄1 𝜐𝜐⁄ 𝑒𝑒𝜐𝜐Ω𝑡𝑡 𝜐𝜐⁄𝑁𝑁
𝜐𝜐=2
�
(6)
where 𝑄𝑄𝜐𝜐 and 𝑄𝑄1 𝜐𝜐⁄ are the harmonic coefficients of the
displacement, and (𝑁𝑁� − 1) and �𝑁𝑁 − 1� are the number of
super-harmonic and sub-harmonic components in the displacement. For
a harmonic excitation, the nonlinear FRF between the response at
DOF 𝑖𝑖 and the excitation at DOF 𝑗𝑗 is defined as
𝐻𝐻𝜐𝜐𝑗𝑗𝜐𝜐 (𝛺𝛺) =𝑄𝑄𝜐𝜐𝐹𝐹𝜐𝜐
(7)
𝐻𝐻𝜐𝜐𝑗𝑗1 𝜐𝜐⁄ (𝛺𝛺) =
𝑄𝑄1 𝜐𝜐⁄𝐹𝐹1 𝜐𝜐⁄
(8)
in which 𝐻𝐻𝜐𝜐𝑗𝑗𝜐𝜐 (𝛺𝛺) denotes the 𝜐𝜐:th-order nonlinear FRF
with the fundamental frequency 𝛺𝛺 and 𝐻𝐻𝜐𝜐𝑗𝑗1 𝜐𝜐⁄
represents the 1 𝜐𝜐:⁄ th order harmonic nonlinear FRF. These
harmonic FRFs are calculated by the receptance based MHB method
described in [10].
2.3 Model calibration and validation
The nonlinear dynamics of a locally nonlinear structure can be
captured more efficiently if the underlying linear system of the
structure is calibrated first, since the number of unknown
parameters is then reduced in the nonlinear calibration. Thus, the
model calibration of nonlinear FE-models is done in two phases; the
calibration of the linear part and the calibration of the nonlinear
part. For the calibration of the linear part, a random excitation
with a low excitation level is used to excite the linear dynamic of
the structure under test, and the linear FRFs are measured. The
linear calibration is done by minimizing the deviation between the
calculated and measured linear FRFs. When calibrating the nonlinear
part, many starting points are examined to avoid a local minimum.
However, the number of starting points that can be evaluated is
limited due to the computational expense. Therefore, the Latin
hypercube sampling method is used to select a limited number of
starting seed candidates that span the parametric space. Then the
candidate for which the calibration metric has the smallest value
is used as a starting point for the optimization of the nonlinear
calibration. Linear and nonlinear calibrations are both done
through optimizations using the gradient-based Levenberg-Marquardt
optimization method [13].
NON-LINEARITIES: IDENTIFICATION AND MODELLING 2585
-
2.3.1 Nonlinear calibration metric
The nonlinear model calibration minimizes the deviation between
the analytical multi-harmonic nonlinear FRFs and the experimental
counterparts. The objective function is defined as
𝛿𝛿 = 𝜺𝜺𝐻𝐻𝑾𝑾𝜺𝜺 (9)
where W is a positive definite weighting matrix (an identity
matrix is used for W in this paper) and 𝜺𝜺 is
𝜺𝜺 = 𝒗𝒗HA − 𝒗𝒗Hx (10)
where superscripts A denotes analytical and X denotes
experimental and 𝒗𝒗𝐻𝐻 is
𝒗𝒗𝐻𝐻 = �Re �𝑣𝑣𝑒𝑒𝑣𝑣𝑡𝑡�𝐻𝐻1 𝜐𝜐⁄ ;⋯ ;𝐻𝐻1 2⁄ ;𝐻𝐻1;𝐻𝐻2;⋯ ;𝐻𝐻𝜐𝜐��� ; Im
�𝑣𝑣𝑒𝑒𝑣𝑣𝑡𝑡�𝐻𝐻1 𝜐𝜐⁄ ;⋯ ;𝐻𝐻1 2⁄ ;𝐻𝐻1;𝐻𝐻2;⋯ ;𝐻𝐻𝜐𝜐���� (11)
In Eq.(11), Im denotes the imaginary part, vect denotes
vectoring and 𝐻𝐻𝜐𝜐� includes all the �̅�𝜐:th order nonlinear FRFs
resulting from different measurement points.
2.4 Ƙ-fold cross-validation
A Ƙ-fold cross-validation is used to obtain an estimate of the
parameter statistics after the nonlinear parameters are calibrated.
In the Ƙ-fold cross-validation, the available data set is
partitioned into Ƙ equally sized subsamples. Here, one subsample is
used for validation while the remaining Ƙ-1 subsamples are used for
calibration, which results in Ƙ calibration runs. From these, Ƙ
sets of calibrated parameter settings that minimize the calibration
deviation metric for the Ƙ different partitions of the available
data are obtained. These can then be used for statistical
evaluation of the mean and covariance of the parameter estimates.
The optimum parameter setting found by the nonlinear calibration is
used as the starting point for the Ƙ-fold cross-validation and the
optimizations are done by using the undamped Gauss-Newton method
[13].
3 Case study
The improved nonlinear model calibration method is used to
experimentally calibrate a nonlinear FE-model representing a
structure with a clearance nonlinearity.
3.1 The structure under test and experimental setup
The test rig used to study the method consists of a cantilever
beam with a rubber bump stop at its free end, see Fig. 3. The
cantilever beam is supported by a U-shaped steel frame, mainly made
of square hollow tubes with an outer side length of 80 mm and a
wall thickness of 6 mm. The cantilever beam is 633 mm long with a
cross section of 12 x 30 mm2. The test structure is supported by
four soft rubber mounts. The test structure is excited using a
modal shaker of type 2025E at the measurement point number 3, and
13 PCB accelerometers of type 352A56 are used to measure the
responses. The measurement points are marked with red numbers in
Fig. 3 and their positions are presented in Table 1. The nonlinear
FE-model of the test rig is shown in Fig. 4.
2586 PROCEEDINGS OF ISMA2016 INCLUDING USD2016
-
3.2 Modelling and calibration of the linear part of the test
structure
The linear part of the test structure is calibrated prior to the
full system calibration by minimizing the deviation between the
analytical and measured FRFs with damping equalization, see [14].
The test structure is excited, using the shaker with a random
signal, at point number 3, and all 13 accelerometers are used to
measure the responses. The root mean square (RMS) value of the
random excitation is selected to ensure that the gap nonlinearity
is not engaged.
Figure 3: (a) The structure under test (b) Closer perspective on
the gap mechanism
Figure 4: The FE-model of the structure under test
The flexibility of the frame is included in the model. The frame
is modelled using 42 simple beam elements (CBAR), within MSC
Nastran, while the cantilever beam is modelled by 13 CBAR elements.
The cantilever beam is rigidly connected to the frame by a Nastran
RBE2-elelment. The supports (rubber mounts) are modelled using two
linear springs with the same stiffness coefficient 𝑘𝑘𝑠𝑠. The mass
of the frame is 20.78 kg and the mass of the cantilever beam is
1.98 kg. To obtain the same mass of the model, a density of 7795 kg
m3⁄ is used for the frame and a density of 7901 kg m3⁄ is used for
the cantilever beam. There are some uncertainties in the mass and
stiffness properties of the connection corners of the frame (each
corner is represented using three beam elements, which are plotted
using red lines in Fig. 4)
𝒇𝒇(𝑡𝑡)
𝒒𝒒6 𝒒𝒒4 𝒒𝒒7
𝑘𝑘𝑠𝑠 𝑘𝑘𝑠𝑠
𝒒𝒒5 𝒒𝒒3 𝒒𝒒2 𝒒𝒒1
𝒇𝒇NL
�𝒇𝒇NL = 𝑘𝑘𝑐𝑐(|𝒒𝒒7| − 𝑑𝑑)1.5 − 𝑣𝑣�̇�𝒒7|�̇�𝒒7|, for 𝒒𝒒7 <
−𝑑𝑑
𝒇𝒇NL = 0, otherwise
𝑑𝑑 𝑘𝑘𝑐𝑐 𝑣𝑣
x
y 1 2 3 4 5 6 7
8
9 10 11 12
13
(a) (b)
NON-LINEARITIES: IDENTIFICATION AND MODELLING 2587
-
Young’s moduli of the frame, the connection corners and the
cantilever beam, the density of the connection corner and the
stiffness coefficient 𝑘𝑘𝑠𝑠 are used as the five parameters in the
calibration. The nominal and the calibrated parameter values are
shown in Table 2. Nine out of 13 measured FRFs are used in the
calibration and the FRFs from the rest of the measurement points
are used for validation. An example of FRFs from the test data, the
calibrated and nominal FE-model of the linear part of the structure
is shown in Fig. 5a and the corresponding validation result is
shown in Fig. 5b.
Sensor No. 1 2 3 4 5 6 7 Coordinates (100, 0) (200, 0) (300, 0)
(400,0) (500, 0) (600,0) (633, 0)
Sensor No. 8 9 10 11 12 13 Coordinates (0,-47) (0,-179)
(35,-219) (342,-219) (670,-179) (670,-47)
Table 1: Sensor distances given as (∆𝑥𝑥,∆𝑦𝑦) in relation to the
origin shown in Fig. 3a
3.3 Modelling and calibration of the nonlinear dynamics of the
structure under test
From the calibration results above, the characteristics of the
linear part of the test structure are assumed to have been
captured. The next task is to model the nonlinearity due to the
contact. The contact interface between the tip of the beam and the
bump stop is represented using a Hertzian contact model with
contact stiffness 𝑘𝑘𝑐𝑐 and a quadratic damping presented in Fig 4.
The contact stiffness 𝑘𝑘𝑐𝑐 (parameter 1), gap d (parameter 2) and
quadratic damping coefficient 𝑣𝑣 (parameter 3) are considered as
the three unknown parameters to be calibrated. The nominal values
of the parameters are shown in Table 5. An example of the nonlinear
multi-harmonic FRFs between response at measurement point 7 and a
multi-harmonic external force, which has the fundamental amplitude
8N, applied at measurement point 3, is shown in Fig 6.
3.3.1 Pretest planning
Before measuring the nonlinear dynamics of the test structure,
the nominal nonlinear model is used to select an optimal
configuration to obtain the most valuable test data to be used for
the nonlinear calibration. In this case, the location of three
sensors, the location of one actuator, three different excitation
levels and one frequency range are selected from the candidate sets
shown in Table 3. The first resonance of the underlying linear
system appears in the first frequency range, [21-40] Hz, while the
second resonance is within the last set [141-160] Hz. When an
actuator operates with three different excitation levels in a
frequency range, the nonlinear multi-harmonic FRFs, measured using
three sensors, are considered as one data set. To select 3 sensor
locations from 7 candidates gives 35 combinations. Similarly, 3
combinations are provided by the candidate actuator positions, 20
combinations of the excitation levels and 7 combinations of
frequency range. Combining these 4 terms (selections of the sensor
locations, actuator location, excitation levels and frequency
ranges) gives 14700 data sets in total. The FIM is calculated for
each data set. The first five data sets with the largest
determinant of the resulting FIM, which gives the smallest
covariance matrix of the estimated parameters, are shown in Table
4. It is noted that No. 2 and No. 1 configurations give nearly the
same determinant of the FIM. Additionally, the shaker is connected
to an impedance head which can measure force and acceleration at
the same time. Therefore, configuration No. 2 is selected for the
nonlinear model calibration. After the measurement configuration is
selected in the pretest planning process, the inverse of the FIM
and the MAC of the corresponding Jacobian matrix are calculated.
The inverse of the FIM is
2588 PROCEEDINGS OF ISMA2016 INCLUDING USD2016
-
FIM−1 = 1 ∙ 10−10 ∙ �0.35 −0.16 −0.19−0.16 0.13 0.02−0.19 0.02
0.78
� σ2
The inverse of the FIM, the parameter covariance matrix, shows
that the unknown parameter values can be calibrated with small
uncertainties under the assumption that σ2 is small. From the
measured data the standard deviation, σ, of the measurement noise
is found to be smaller than 2% for the studied test design. Figure
7a shows that 𝑃𝑃1 is correlated with 𝑃𝑃2 whereas 𝑃𝑃1 has a very
small correlation with 𝑃𝑃3. The correlation value between 𝑃𝑃1 and
𝑃𝑃2 is equal to 0.56 To improve the identifiability of 𝑃𝑃1 and 𝑃𝑃2,
the steps of excitation frequency are decreased to 0.1 Hz around
the first resonance of the underlying linear system; i.e. the range
24-28 Hz. Then, the correlation value between 𝑃𝑃1 and 𝑃𝑃2 is
reduced to 0.45.
E of the frame
(GPa)
E of the connection
corners (GPa)
E of the beam
(GPa)
Density of the connection
corners (kg/m3)
Stiffness of the rubber mounts
(N/m)
Nominal 210 150 210 4000 10000 Calibrated 205 128 201 5175
57989
Table 2: The nominal and calibrated parameter values used for
the linear parts of the test structure
Figure 5: An example of the FRFs from the nominal, calibrated
model representing the underlying linear system compared with the
corresponding experimental FRFs. (a) calibration result (b)
validation result
3.3.2 Measurement of nonlinear dynamics of the structure under
test
Using the result from the pretest planning, the multi-harmonic
nonlinear FRFs excited using multi- sinusoidal excitations were
obtained using a National Instruments data acquisition system with
a Matlab interface. The experimental setup for obtaining the
multi-harmonic nonlinear FRFs is shown in Fig. 8. The gap between
the free tip of the cantilever beam in rest and the bump stop was
kept to 0.60 mm during the measurements. The known value of the
gap, which is a parameter used in the calibration, is used to
validate the success of the calibration. Point 3 was used for the
excitation and the responses at points 3, 6 and 7 were measured.
The multi- sinusoidal excitation was designed to contain 2
super-harmonics (the second and third harmonics) together
(a) (b)
NON-LINEARITIES: IDENTIFICATION AND MODELLING 2589
-
with the fundamental harmonic, in which the fundamental harmonic
stepped from 21 to 40 Hz, with steps of 1 Hz. The excitation
frequency steps are decreased to 0.1 Hz for the frequency range
24-28 Hz which is around the system’s first resonance. The
magnitudes of the two side harmonics are small compared to the
fundamental but large compared to the expected noise level [8]; the
magnitude of the side harmonics’ excitation is chosen as 2% of the
magnitude of the fundamental. The measurement was repeated three
times for the fundamental excitation levels 2, 4 and 6N. Sensor
locations Actuator positions Excitation levels [N] Frequency ranges
[Hz]
[1, 2, 3, 4, 5, 6, 7] [1, 2, 3] [1, 2, 3, 4, 5, 6] [21-40],
[41-60], [61-80], [81-100], [101-120],[121-140],[141-160] Table 3:
The candidate sets for the sensor locations, actuator positions,
excitation levels and frequency ranges.
Figure 6: An example of the multi-harmonic nonlinear FRFs
compared with the underlying linear FRFs.
The nonlinear FRFs are plotted by red dots while the linear FRFs
are plotted as blue solid lines. (a) fundamental nonlinear FRF (b)
second order nonlinear FRF (c) third order nonlinear FRF.
Actuator position Excitation levels
(N) Frequency range
(Hz) Sensor position Determinant of the FIM
1 3 [2, 4, 6] [21-40] [4, 6, 7] 7.57e+31 2 3 [2, 4, 6] [21-40]
[3, 6, 7] 7.36e+31 3 3 [2, 4, 6] [21-40] [5, 6, 7] 6.72e+31
4 3 [2, 4, 6] [21-40] [3, 4, 7] 5.69e+31 5 3 [2, 4, 6] [21-40]
[4, 5, 7] 5.12e+31
Table 4: The first five selected configurations from the nominal
model
2590 PROCEEDINGS OF ISMA2016 INCLUDING USD2016
-
(a) (b)
Figure 7: The correlation indices of the parameters included in
the nonlinear calibration. (a) correlation indices with step size 1
Hz. (b) The correlation indices with a refined step size
It is difficult and time consuming to control the amplitude of
the harmonics of the excitation force to be perfectly constant for
each frequency step. Therefore, the amplitude is controlled with a
few iterations by an off-line feedback force controller which
dramatically shortens the measurement time and the amplitudes of
the applied force are kept almost constant for each excitation
level. To keep the accuracy of the measurement data, the applied
force amplitudes were measured and used to calculate the analytical
multi-harmonic nonlinear FRFs.
Figure 8: The experimental setup for nonlinear testing
3.4 Nonlinear calibration
For the evaluation of optimization starting points, it is
assumed that the contact stiffness (𝑃𝑃1) has a uniform probability
distribution between 105 and 107, the gap (𝑃𝑃2) follows a beta
distribution with a mean values equal to the corresponding value of
the nominal model and the standard deviation is set to 50% of the
mean value. Further, the quadratic damping coefficient (𝑃𝑃3) has a
uniform distribution between 1 and 102. The Latin hypercube
sampling method is used to select one hundred parameter
realizations which span the parametric space. The multi-harmonic
nonlinear FRFs of these realizations are calculated and compared to
the experimental nonlinear FRFs. Among the 100 candidate starting
points, the point giving the smallest value of the objective
function is used as the starting point for calibration. The
calibrated parameter values
Matlab
Off-line Force Controller
Signal Generator
Amplifier Shaker National Instruments Data Acquisition
System
Force Transducer and Accelerometers
Multi-sinusoidal input
NON-LINEARITIES: IDENTIFICATION AND MODELLING 2591
-
and the measured gap value are shown in Table 5. An example of
comparisons of the calculated multi-harmonic nonlinear FRFs from
the calibrated model and the measured ones is shown in Fig. 9.
Evidently, the calculated multi-harmonic nonlinear FRFs show good
agreement with the measured FRFs and the calibrated value of the
gap parameter deviate from the known value by less than 1.7%,
indicating that the calibrated nonlinear model can be used to
represent the nonlinear dynamics of the test structure. To validate
the calibrated nonlinear model, the multi-harmonic nonlinear FRFs
are calculated for the excitation level 8N, which was not included
in the calibration, and compared with the measured counterparts.
The validation results are shown in Fig. 10.
3.5 Cross validation results
The data set is equally divided into 9 subsamples by the
excitation levels and the sensors; one subsample is used for
validation, and the remaining 8 subsamples are used to calibrate
the model which results in 9 calibration runs. Each subsample
consists of the multi-harmonic nonlinear FRFs measured from one
measurement point excited by one excitation level. The cross
validation results can be seen in Fig. 11. From the calibration
results shown in Fig. 9 and the validation results shown in Fig.
10, the improved calibration framework is able to accurately
identify unknown parameter values from the experimental data. The
cross validation results show that the calibrated parameters have
small uncertainties.
4 Conclusions
The previously proposed nonlinear model calibration method,
which consists of a pretest planning, a multi- sinusoidal
excitation and an effective optimization routine, is improved and
validated in this paper. The improvement is done through
calibrating linear and nonlinear parts separately, and extending
the pretest planning process. The improved method is validated
through model calibration and validation using experimental data
from a structure with clearance. The calibration of the linear part
used the linear FRFs from a test with a random excitation at a
small force level. The optimal configuration selected by the
extended pretest planning method, was used to determine a test
design for measuring the nonlinear dynamics of the structure under
test. Then the parameters that represent the gap mechanism were
calibrated using the multi-harmonic nonlinear FRFs found from tests
where the structure was excited by a multi- sinusoidal force. The
calibration and validation results show that the improved method is
able to calibrate a nonlinear model, which represents a structure
with a gap nonlinearity, with a good prediction accuracy and small
uncertainties.
𝑃𝑃1 (contact stiffness) [N/m1.5]
𝑃𝑃2 (gap) [mm]
𝑃𝑃3 (quadratic damping coefficient)
[N/(m/s2)2] Nominal 1.00 × 106 1.00 10.00
Calibrated 4.51 × 105 0.61 25.21 Measured - 0.60 -
Table 5: The nominal, calibrated and measured parameters of the
nonlinear model
2592 PROCEEDINGS OF ISMA2016 INCLUDING USD2016
-
(a)
(b)
(c)
Figure 9: Comparison of calculated and measured multi-harmonic
nonlinear FRFs for the excitation levels that are included in the
calibration process. (a) excitation level 2N (b) excitation level
4N (c) excitation level 6N
NON-LINEARITIES: IDENTIFICATION AND MODELLING 2593
-
Figure 10: Comparison of calculated and measured multi-harmonic
nonlinear FRFs for the excitation level 8N.
Figure 11: The calibration results from the 9-fold
cross-validation. The nine estimated parameter
realizations are normalized to the calibrated parameter values.
The blue bars represent the normalized estimated parameter values
for each calibration and the red line represents the normalized
values of the
parameters calibrated.
2594 PROCEEDINGS OF ISMA2016 INCLUDING USD2016
-
References
[1] S. Meyer, M. Link, Modelling and Updating of Local
Non-linearties Using Frequency Response Residuals, Mechanical
Systems and Signal Processing, Vol. 17, Iss. 1, (2003), pp.
219-226.
[2] I. Isasa, A. Hot, S. Cogan, E. Sadoulet-Reboul, Model
Updating of Locally Non-linear Systems Based on Multi-Harmonic
Extended Constitutive Relation Error, Mechanical System and Signal
Processing, Vol. 25, Iss. 7, (2011), pp. 2413-2425.
[3] M. Kurta, M. Eritenb, D. McFarlandc, L. Bergmanc, A.
Vakakis, Methodology for Model Updating of Mechanical Components
with Local Nonlinearities, Journal of Sound and Vibration, Vol.
357, No. 24, (2015), pp. 331–348.
[4] D. C. Kammer, Sensor Placement for On-Orbit Modal
Identification and Correlation of Large Space Structures, Journal
of Guidance, Control, and Dynamics, Vol.14, No. 2, (1991), pp.
251-259.
[5] C. Papadimitriou, and J. L. Beck, Entropy-Based Optimal
Sensor Location for Structural Model Updating, Journal of Vibration
and Control, Vol. 6, No. 5, (2000), pp. 781-800.
[6] J.E.T. Penny, M.I. Friswell, S.D. Garvey, Automatic Choice
of Measurement Locations for Dynamic Testing, AIAA Journal, Vol.
32, No. 2, (1994), pp. 407-414.
[7] R. Castro-Triguero, M.I. Friswell, R. Gallego Sevilla,
Optimal Sensor Placement for Detection of Non-Linear Structural
Behavior, The proceedings of International Conference on Noise and
Vibration Engineering (ISMA), Leuven, Belgium, 2014, september
15-17.
[8] Y. Chen, V. Yaghoubi, A. Linderholt, T. Abrahamsson,
Informative Data for Model Calibration of Locally Nonlinear
Structures Based on Multi-Harmonic Frequency Responses, Journal of
Computational and Nonlinear Dynamics, Vol. 11, No. 5, (2016).
[9] T. Cameron, J. Griffin, An Alternating Frequency/Time Domain
Method for Calculating the Steady-State Response of Nonlinear
Dynamic Systems, ASME Journal of Applied Mechanics, Vol. 56, No.1,
(1989) pp. 149-154.
[10] Y. Ren, C.F. Beards, A New Receptance-Based Perturbative
Multi-Harmonic Balance Method for the Calculation of the Steady
State Response of Non-Linear Systems, Journal of Sound and
Vibration, Vol. 172, No. 5, (1994), pp. 593-604.
[11] J.V. Ferreira, D.J. Ewins, Algebraic Nonlinear Impedance
Equation Using Multi-Harmonic Desbribing Function, Processing of
the 15th International Modal Analysis conference, Orlando, USA,
1997, February 3-6.
[12] E. Walter, L. Pronzato, Identification of Parametric Models
from Experimental Data, Springer, London (1997).
[13] J. Lundgren, M. Ronnqvist, P. Varbrand, Optimization,
Studentlitteratur, 2010. [14] T. Abrahamsson, D.C. Kammer, Finite
Element Model Calibration Using Frequency Responses with
Damping Equalization, Mechanical Systems and Signal Processing,
Vol. 62-63, pp. 218-234
NON-LINEARITIES: IDENTIFICATION AND MODELLING 2595
-
2596 PROCEEDINGS OF ISMA2016 INCLUDING USD2016