Embed Size (px)
Citation preview
JAXA - International Workshop on Vegetation Lidar and Application from Space, Kyoto, Japan – 6-7 Jan. 2016 1
Waveform simulations
and analysis of Lidar data
for the development
of a space-based
vegetation lidar system
International Workshop on Vegetation Lidar
and Application from Space
January 6-7, 2016, Kyoto, Japan
S. Durrieu1, E. Grau1, 2, J-P Gastellu-Etchegorry3, G. Vincent4,
C. Antin5, J. Costeraste6, J. Lochard7, F. Tinto6, H. Debise1,
M. Bouvier1, C. Lavalley1,8, F. Fabre7
1 Irstea-UMR TETIS, 2 CNES , 3 CESBIO, 4 IRD-UMR AMAP, 5Cirad-UMR AMAP
7 AIRBUS- Defence & Space, 8 CNRS-UMR AMAP
General context
Vegetation structure is the driver and the result of forest ecosystem
ecological functions
Structure measurements provide information on processes and on
biophysical parameters and are needed
● to advance our understanding on forest ecosystems functioning
● and to sustainably manage forests
Spaceborne Lidar missions are currently the best solution to expand
forest structure measurements in space and time
Several missions are planned or under study by space agencies:
GEDI/NASA , MOLI/JAXA, LEAF/CNES
JAXA - International Workshop on Vegetation Lidar and Application from Space, Kyoto, Japan – 6-7 Jan. 2016 2
Outline
LEAF, the vegetation lidar mission under study in France
A modeling framework developed in the frame of
experimentation/validation study
an ongoing
Results on vegetation representations for RT modeling
Instrumental studies
Research avenues to improve forest parameters assessment from Lidar
Perspectives
JAXA - International Workshop on Vegetation Lidar and Application from Space, Kyoto, Japan – 6-7 Jan. 2016 3
JAXA - International Workshop on Vegetation Lidar and Application from Space, Kyoto, Japan – 6-7 Jan. 2016
LEAF: Lidar for EArth and Forests
A vegetation mission under study
in France
2014 : Recommended as a possible mid- term mission following the scientific prospective seminar of CNES
4

LEAF a satellite mission coupling a Lidar and an imager
Primary objective is to provide spatialized information on forest 3D structure and on its dynamics
Secondary objectives :
● Ground altimetry data for Geodesy, Geohazards and Cryosphere studies
● Continental water level data for Hydrologists
Design by Airbus Defense and Space (former EADS Astrium) with the support of CNES
LEAF mission
A standard satellite platform
Square modular structure ± 3° depointing capability
870 Kg launch mass
nadir
1500 mm
Measured track
V
A small launcher
(Vega- ESA)
5 years life
Launch in 2
Gro
C
Ground Station
Measu track
5 years life
Launch in 2
Gro
C
LEAF Satellite
Ground Station
JAXA - International Workshop on Vegetation Lidar and Application from Space, Kyoto, Japan – 6-7 Jan. 2016 5
LEAF instruments
Enhance geolocation
Improve accuracy of forest parameters
Provide data for extrapolation of lidar results
After 3 years
Spatial and temporal sampling characteristics 500 m
● 15 Hz repetitive rate
●
●
3 year revisit period
5/6 years lifetime
LEAF: current design
Fullwaveform lidar system
• NIR wavelength : 1064 nm (eye safety)
• Pulse duration < 2ns
• Footprint diameter: 20 m with an array detector (4) slope
• Energy : 86mJ laser output => 60mJ instrument output
• Signal sampling = 1 ns Vertical resolution = 15 cm z res.
on the shelves
VHR XS Imager
• Panchromatic + B,G,R,NIR
• 2m resolution, 14 km swath width
• Co-registered with the Lidar
2.5 km
JAXA - International Workshop on Vegetation Lidar and Application from Space, Kyoto, Japan – 6-7 Jan. 2016 6
LEAF concept is not set in stone
Models used to size the system are considered to be insufficiently
reliable still pending issues to optimize the mission and enhance its
capacity to monitor forest
This led CNES to implement an experimentation/validation stage
Objective for LEAF: size a system providing complete vegetation
profiles even for dense forests without any risk of calling into question
the concept or the system architecture in the latter mission project
phases
Establishment of a working plan to address pending issues
JAXA - International Workshop on Vegetation Lidar and Application from Space, Kyoto, Japan – 6-7 Jan. 2016 7
u i r e m e n t s q e u s e r r g m e e t i n
c i t y o s i z e a s p a c e s y m e s t t
u l a t e d & m e a s i g n a l
A i r b o r n e m e a n t s
+ A n c i a a a
( f u l l y c h a r a
nadir
(full
d e l i n g
i
i a l
p r o c e s s g
C o c y
e t
n d c h a r a c t e r i s t i c s
S t a n d c h a r a c t e r i s t i c s
d e r
i i
v e o m s g a l
A l l i o m e t r c r s
C a a p
e u l
n d f r
a
n
f o s t p m e e r s
S t
t a a r e r
w e e b
n s t e n s i
n
n S g
o e l s m T R
i i ti
d o
ll t
l
c t e r i z & c a i d s y s t e m
“ S u f f i c e n t l y ” r e a l s c
s t a n m d
b r a e t e d
d y r
e u r m e s
s u r d e
y b e t w e e n
S m i
c n s t e n s i o C
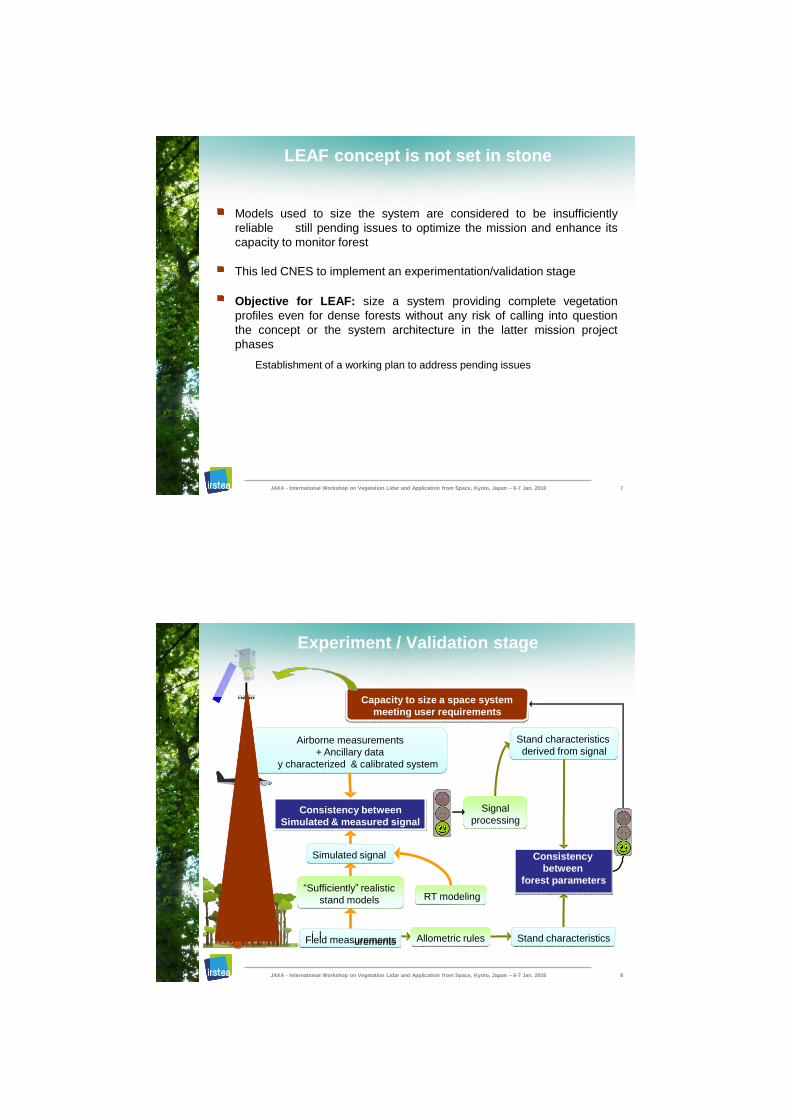
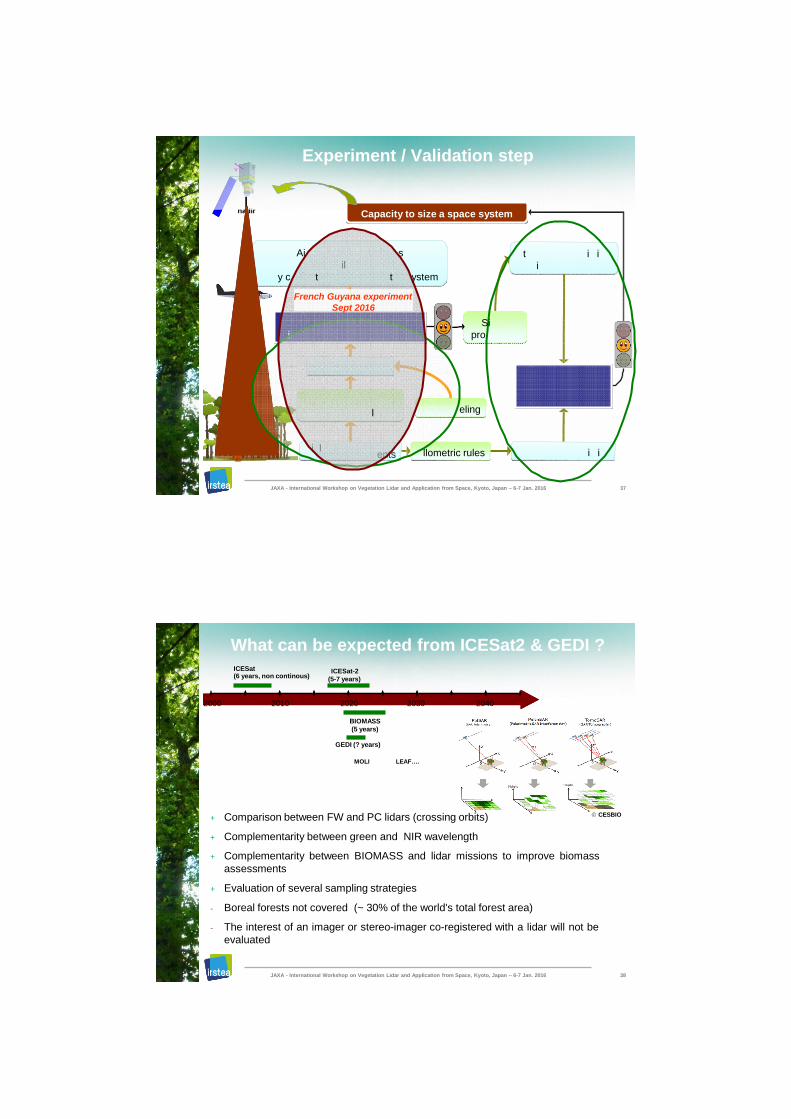
Experiment / Validation stage
F e d m e a s
u l a t e d s i
a l n g
i l u r e m e n t s
S m i
Field measurements
Simulated signal
Consistency between
Simulated & measured signal
Airborne measurements
+ Ancillary data
y characterized & calibrated system
“Sufficiently” realistic
stand models RT modeling
Signal
processing
Consistency
between
forest parameters
Stand characteristics
Stand characteristics
derived from signal
Allometric rules
V
Capacity to size a space system
meeting user requirements
JAXA - International Workshop on Vegetation Lidar and Application from Space, Kyoto, Japan – 6-7 Jan. 2016 8
JAXA - International Workshop on Vegetation Lidar and Application from Space, Kyoto, Japan – 6-7 Jan. 2016
A modeling framework developed
in the frame of the experiment /
validation study
Accurate modeling requires to develop
An efficient and reliable radiative transfer model
“Sufficiently” realistic stand models
9
[Dauzat et al., 2009]
al Workshop on Vegetation Lidar and Application from Space, Kyoto, Japan – 6-7 Jan. 2016 10
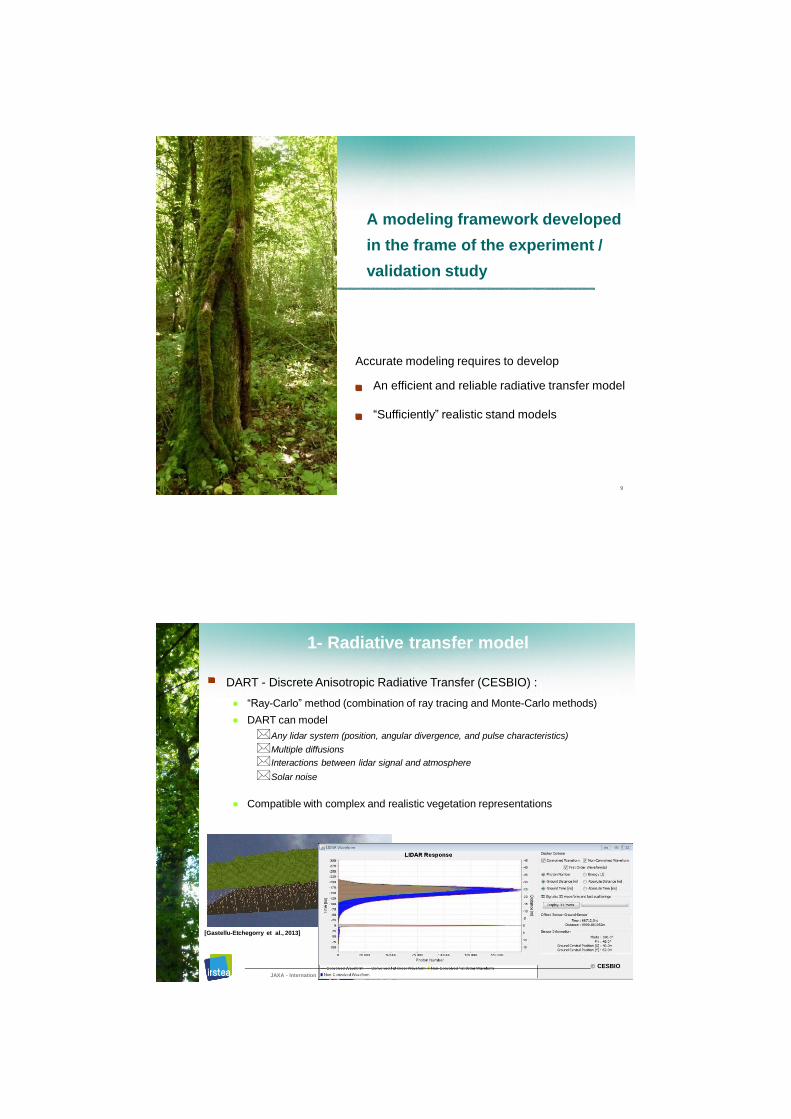
1- Radiative transfer model
DART - Discrete Anisotropic Radiative Transfer (CESBIO) :
● “Ray-Carlo” method (combination of ray tracing and Monte-Carlo methods)
● DART can model
Any lidar system (position, angular divergence, and pulse characteristics)
Multiple diffusions
Interactions between lidar signal and atmosphere
Solar noise
● Compatible with complex and realistic vegetation representations
[Gastellu-Etchegorry et al., 2013]
JAXA - Internation
CESBIO
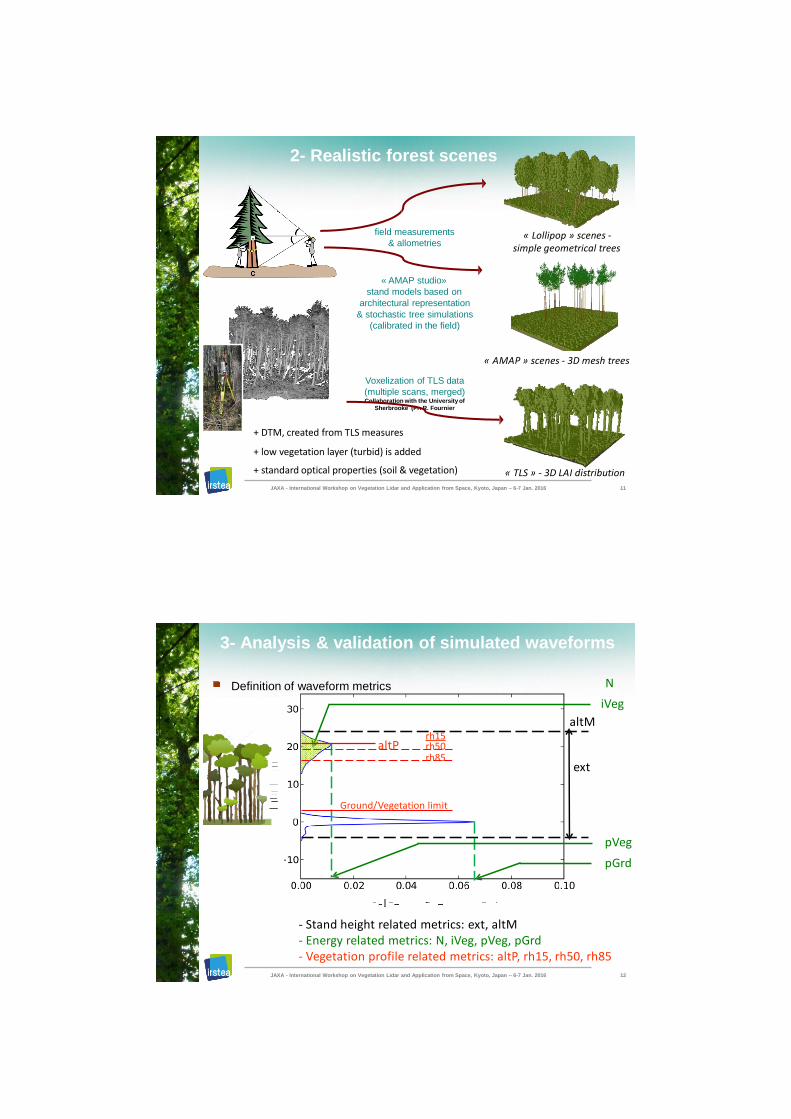
2- Realistic forest scenes
« AMAP studio»
stand models based on
architectural representation
& stochastic tree simulations
(calibrated in the field)
« AMAP » scenes - 3D mesh trees
Voxelization of TLS data
(multiple scans, merged) Collaboration with the University of
Sherbrooke (Pr. R. Fournier
+ DTM, created from TLS measures
+ low vegetation layer (turbid) is added
+ standard optical properties (soil & vegetation)
« Lollipop » scenes - simple geometrical trees
field measurements
& allometries
« TLS » - 3D LAI distribution
JAXA - International Workshop on Vegetation Lidar and Application from Space, Kyoto, Japan – 6-7 Jan. 2016 11
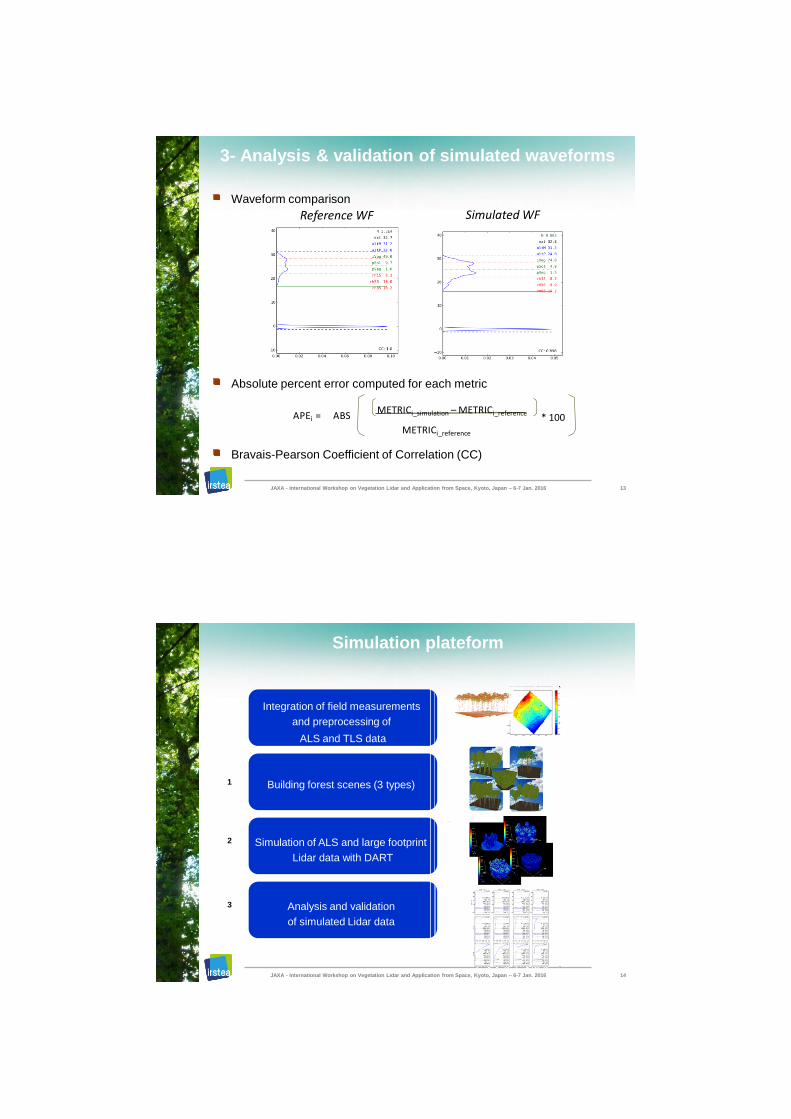
altM
ext
- Stand height related metrics: ext, altM - Energy related metrics: N, iVeg, pVeg, pGrd - Vegetation profile related metrics: altP, rh15, rh50, rh85
N
iVeg
Ground/Vegetation limit
pVeg
pGrd
altP rh15
rh50 rh85
3- Analysis & validation of simulated waveforms
Definition of waveform metrics
JAXA - International Workshop on Vegetation Lidar and Application from Space, Kyoto, Japan – 6-7 Jan. 2016 12
METRICi_simulation – METRICi_reference
METRICi_reference
APEi = ABS * 100
Simulated WF
Absolute percent error computed for each metric
Bravais-Pearson Coefficient of Correlation (CC)
Waveform comparison
Reference WF
JAXA - International Workshop on Vegetation Lidar and Application from Space, Kyoto, Japan – 6-7 Jan. 2016 13
3- Analysis & validation of simulated waveforms
Simulation plateform
Integration of field measurements
and preprocessing of
ALS and TLS data
Building forest scenes (3 types)
Simulation of ALS and large footprint
Lidar data with DART
Analysis and validation
of simulated Lidar data
2
JAXA - International Workshop on Vegetation Lidar and Application from Space, Kyoto, Japan – 6-7 Jan. 2016 14
1
3
JAXA - International Workshop on Vegetation Lidar and Application from Space, Kyoto, Japan – 6-7 Jan. 2016
Preliminary studies on vegetation
representations
Questions:
What is the best way to represent a
forest plot in RT model for lidar
signal simulations?
What are the impacts of
uncertainties of the inputs used to
create forest scenes on the
simulated waveforms ?
15
Data sites
© T. Allouis
Island of REUNION
Tropical forests
© E. Grau
The LANDES forest
Maritime Pine
plantations
JAXA - International Workshop on Vegetation Lidar and Application from Space, Kyoto, Japan – 6-7 Jan. 2016 16
JAXA - Inter
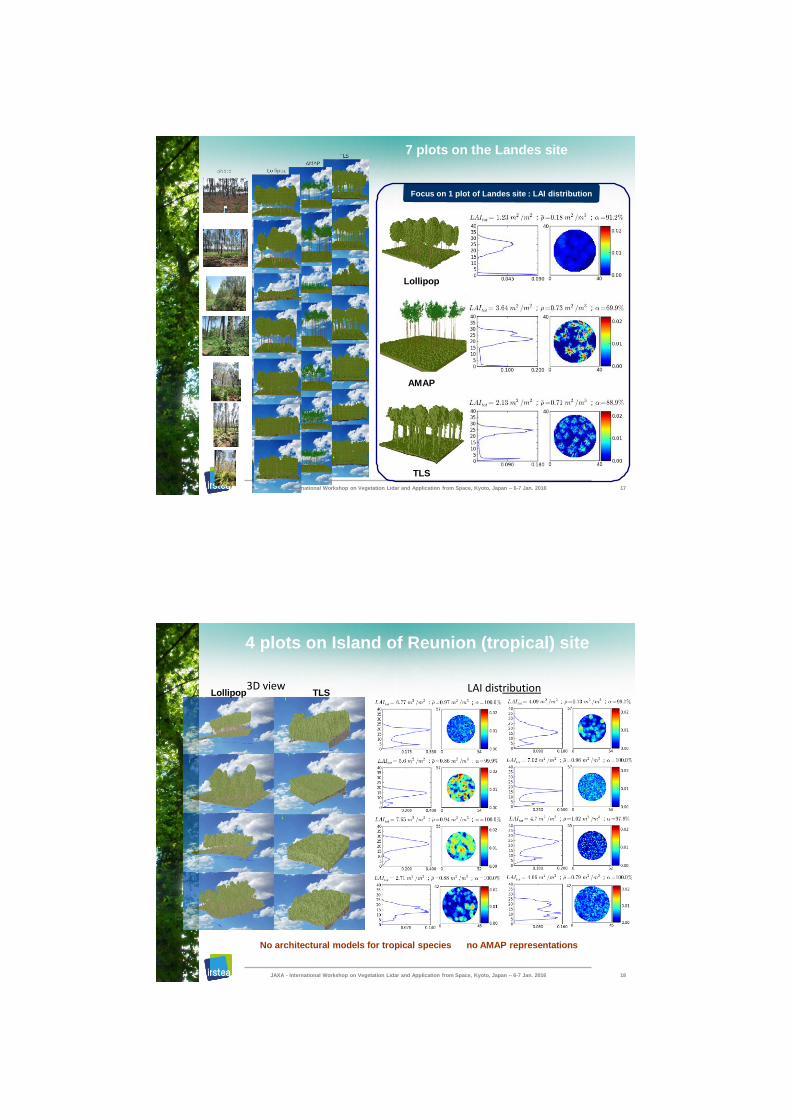
7 plots on the Landes site
TLS
Lollipop
AMAP
Focus on 1 plot of Landes site : LAI distribution
national Workshop on Vegetation Lidar and Application from Space, Kyoto, Japan – 6-7 Jan. 2016 17
4 plots on Island of Reunion (tropical) site
JAXA - International Workshop on Vegetation Lidar and Application from Space, Kyoto, Japan – 6-7 Jan. 2016 18
3D view LAI distribution TLS Lollipop
No architectural models for tropical species no AMAP representations
op on Vegetation Lidar and n. 2016
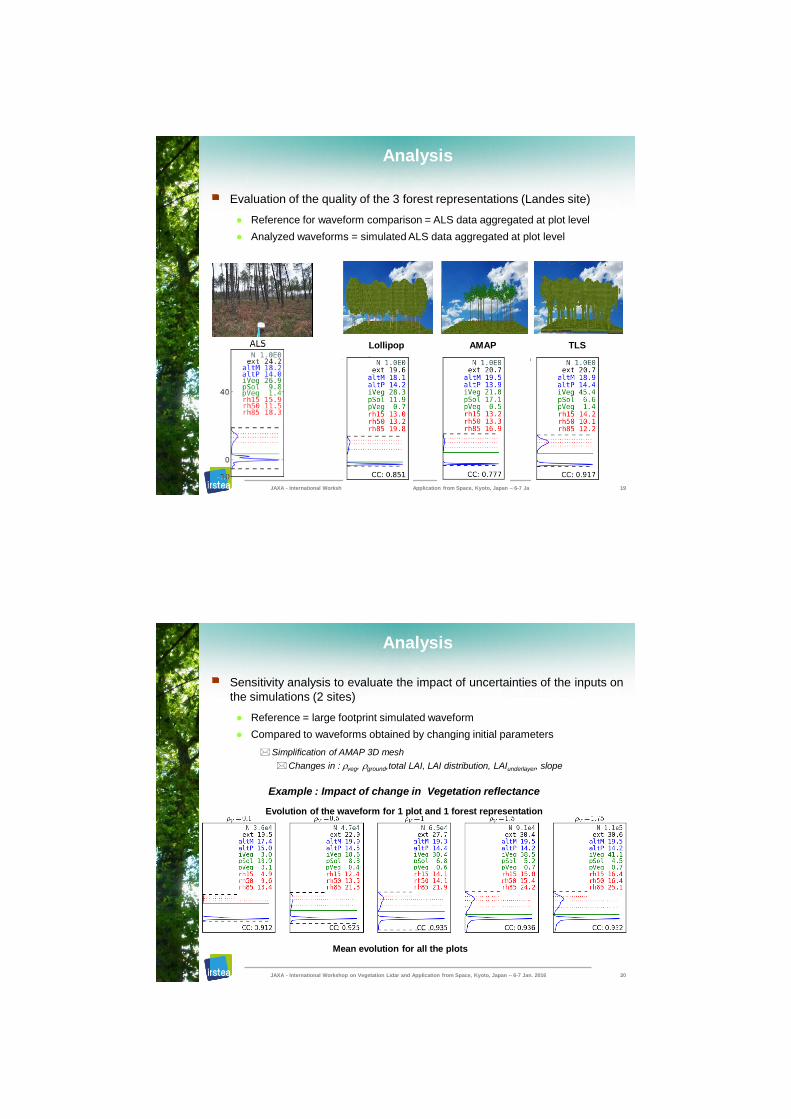
Analysis
Evaluation of the quality of the 3 forest representations (Landes site)
● Reference for waveform comparison = ALS data aggregated at plot level
● Analyzed waveforms = simulated ALS data aggregated at plot level
TLS
JAXA - International Worksh Application from Space, Kyoto, Japan – 6-7 Ja 19
Lollipop AMAP
Analysis
Sensitivity analysis to evaluate the impact of uncertainties of the inputs on
the simulations (2 sites)
● Reference = large footprint simulated waveform
● Compared to waveforms obtained by changing initial parameters
Simplification of AMAP 3D mesh
Changes in : veg, ground,total LAI, LAI distribution, LAIunderlayer, slope
Example : Impact of change in Vegetation reflectance
Evolution of the waveform for 1 plot and 1 forest representation
JAXA - International Workshop on Vegetation Lidar and Application from Space, Kyoto, Japan – 6-7 Jan. 2016 20
Mean evolution for all the plots
Results
Which representation is compatible with RT modelling?
● Lollipop representation: inaccurate crown shapes poor results
● AMAP & TLS: shape of the vegetation peak well reproduced but differences in energy metrics were observed
● Different calibration needs
TLS : only reflectance Lollipop: LAI calibration (+allometry) AMAP (3D mesh) : very complex calibration
TLS based approach appears to be a good candidate to represent forest scenes
Sensitivity analysis :
● Shape metrics are stables (except when slope changes)
● Energy related metrics are very sensitive to changes in veg, LAI, ground
No absolute validation at this stage future experiments will include
● Characterization of the airborne lidar system
● Additional field measurements (spectroradiometer, atmospheric condition)
Simulations with errors in WF metrics < 10% can be expected
Increasing needs
for calibration
JAXA - International Workshop on Vegetation Lidar and Application from Space, Kyoto, Japan – 6-7 Jan. 2016 21
JAXA - International Workshop on Vegetation Lidar and Application from Space, Kyoto, Japan – 6-7 Jan. 2016
Instrumental studies
Impact of systems characteristics for high
energy fullwaveform systems
Evaluation of a low energy photon-counting
Lidar solution as an alternative to high
energy FW lidar
22
Sensitivity analysis a FW system
Sensitivity analysis to evaluate the impact on waveforms of:
● viewing angle, footprint size
● atmospheric condition
● solar noise
Main conclusions
● Intensity of ground and vegetation peaks decreases with viewing angle
and footprint size due to the signal spread risk to miss the ground
peak in dense forest
● Minor impact of sun and atmospheric noises
● Instrumental noise is likely to be the most significant source of noise and
a determining characteristic to size the system
JAXA - International Workshop on Vegetation Lidar and Application from Space, Kyoto, Japan – 6-7 Jan. 2016 23
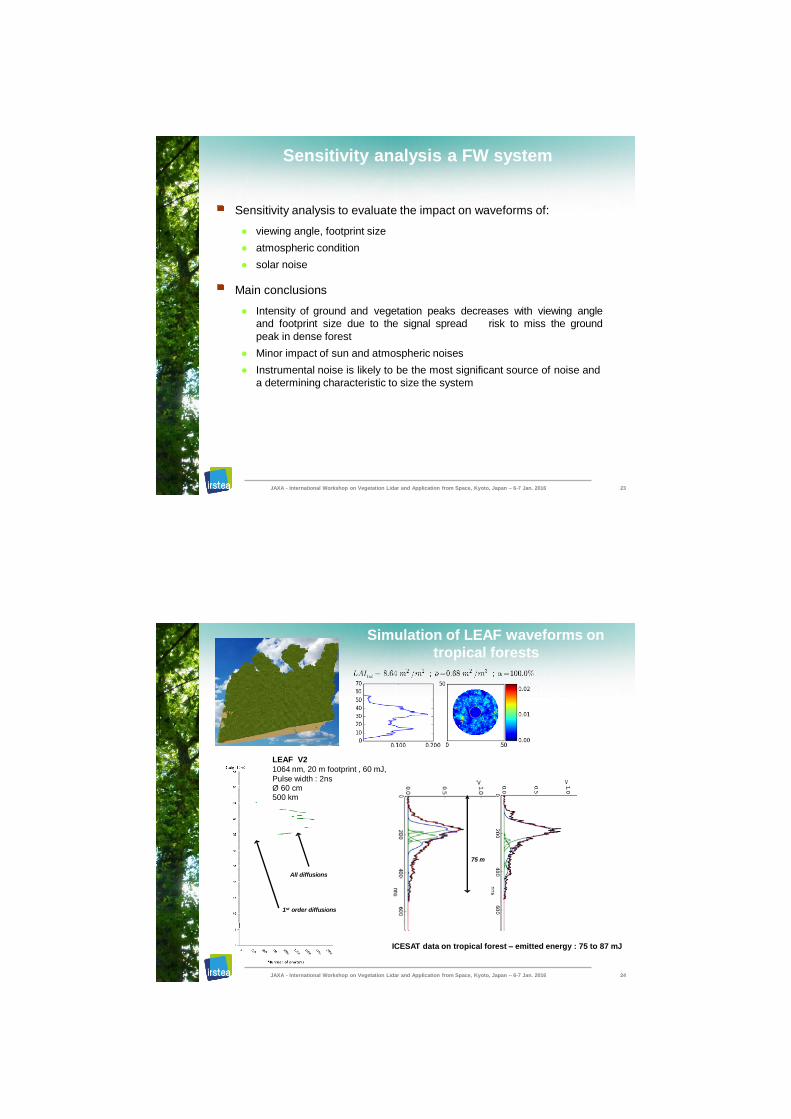
Simulation of LEAF waveforms on
tropical forests
ICESAT data on tropical forest – emitted energy : 75 to 87 mJ
1st order diffusions
75 m
All diffusions
JAXA - International Workshop on Vegetation Lidar and Application from Space, Kyoto, Japan – 6-7 Jan. 2016 24
LEAF V2
1064 nm, 20 m footprint , 60 mJ,
Pulse width : 2ns Ø 60 cm 500 km
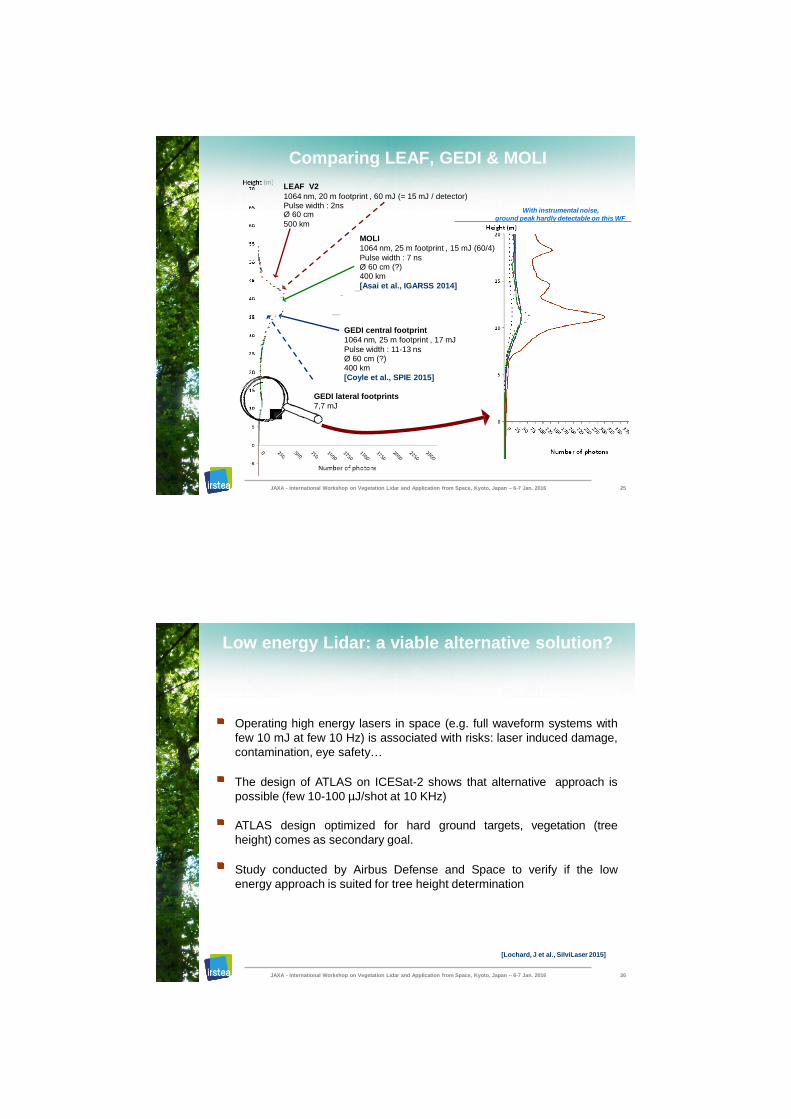
Comparing LEAF, GEDI & MOLI
LEAF V2
1064 nm, 20 m footprint , 60 mJ (= 15 mJ / detector) Pulse width : 2ns Ø 60 cm
500 km
GEDI central footprint
1064 nm, 25 m footprint , 17 mJ
Pulse width : 11-13 ns Ø 60 cm (?) 400 km
[Coyle et al., SPIE 2015]
GEDI lateral footprints
7,7 mJ
MOLI
1064 nm, 25 m footprint , 15 mJ (60/4)
Pulse width : 7 ns Ø 60 cm (?) 400 km
[Asai et al., IGARSS 2014]
With instrumental noise,
JAXA - International Workshop on Vegetation Lidar and Application from Space, Kyoto, Japan – 6-7 Jan. 2016 25
ground peak hardly detectable on this WF
Low energy Lidar: a viable alternative solution?
Operating high energy lasers in space (e.g. full waveform systems with
few 10 mJ at few 10 Hz) is associated with risks: laser induced damage,
contamination, eye safety…
The design of ATLAS on ICESat-2 shows that alternative approach is
possible (few 10-100 µJ/shot at 10 KHz)
ATLAS design optimized for hard ground targets, vegetation (tree
height) comes as secondary goal.
Study conducted by Airbus Defense and Space to verify if the low
energy approach is suited for tree height determination
JAXA - International Workshop on Vegetation Lidar and Application from Space, Kyoto, Japan – 6-7 Jan. 2016 26
[Lochard, J et al., SilviLaser 2015]
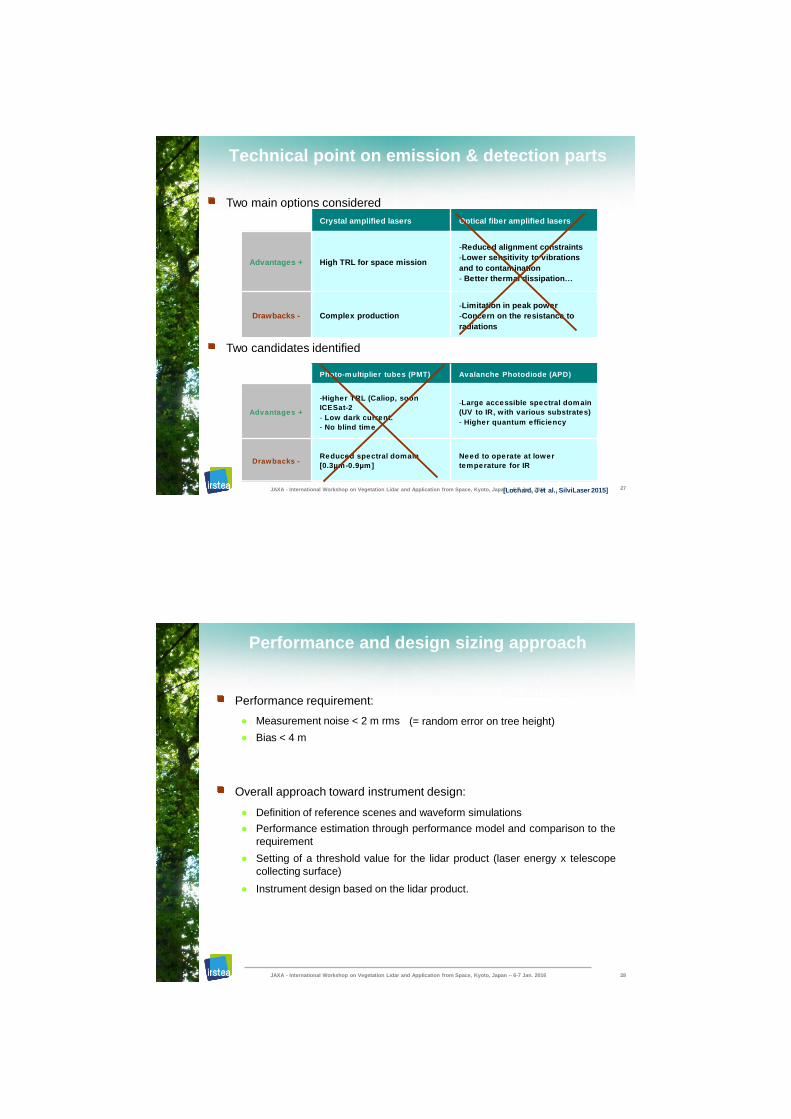
Technical point on emission & detection parts
Two main options considered
Two candidates identified
Crystal amplified lasers Optical fiber amplified lasers
Advantages + High TRL for space mission
-Reduced alignment constraints
-Lower sensitivity to vibrations
and to contamination
- Better thermal dissipation…
Drawbacks - Complex production
-Limitation in peak power
-Concern on the resistance to
radiations
Photo-multiplier tubes (PMT) Avalanche Photodiode (APD)
Advantages +
-Higher TRL (Caliop, soon
ICESat-2
- Low dark current.
- No blind time
-Large accessible spectral domain
(UV to IR, with various substrates)
- Higher quantum efficiency
Drawbacks - Reduced spectral domain
[0.3µm-0.9µm]
Need to operate at lower
temperature for IR
JAXA - International Workshop on Vegetation Lidar and Application from Space, Kyoto, Japa[nL–o6c-h7 aJradn., 2J01e6t al., SilviLaser 2015] 27
Performance and design sizing approach
Performance requirement:
● Measurement noise < 2 m rms
● Bias < 4 m
(= random error on tree height)
Overall approach toward instrument design:
● Definition of reference scenes and waveform simulations
● Performance estimation through performance model and comparison to the
requirement
● Setting of a threshold value for the lidar product (laser energy x telescope
collecting surface)
● Instrument design based on the lidar product.
JAXA - International Workshop on Vegetation Lidar and Application from Space, Kyoto, Japan – 6-7 Jan. 2016 28
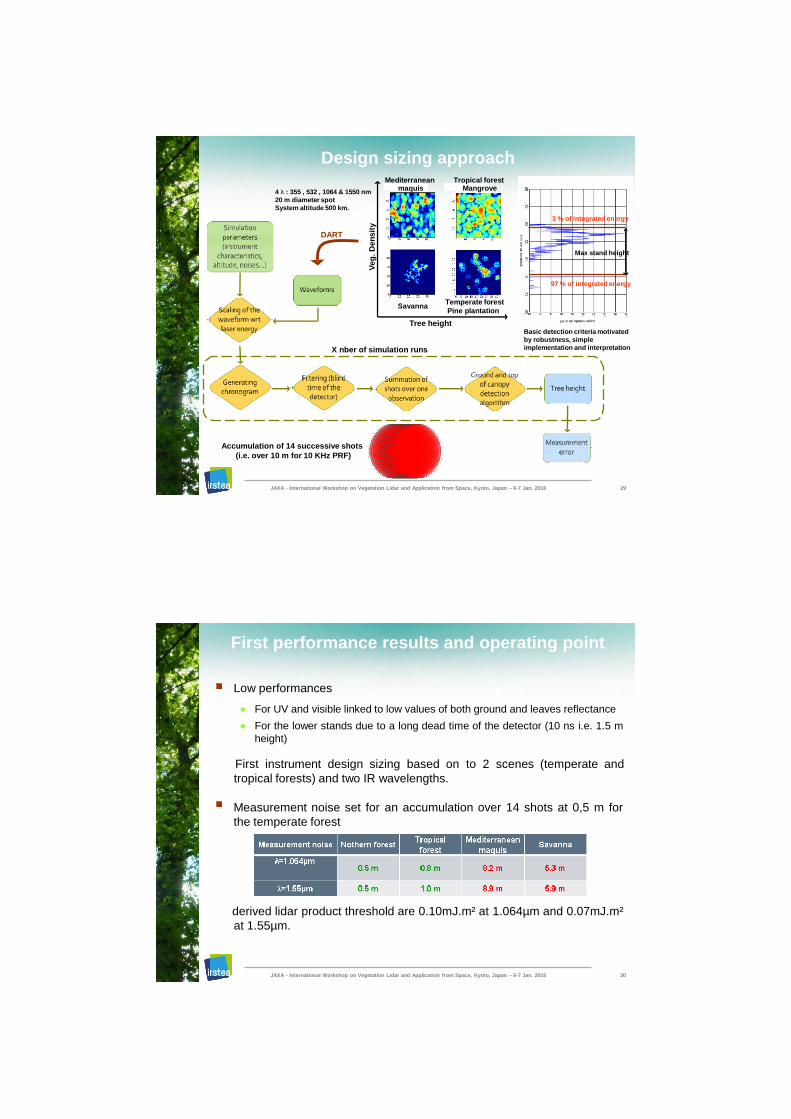
X nber of simulation runs
Mediterranean maquis Tropical forest
Savanna Northen forest
Tree height
Ve
g.
De
ns
ity
Mediterranean Tropical forest maquis Mangrove
Savanna Temperate forest
Pine plantation
Accumulation of 14 successive shots
(i.e. over 10 m for 10 KHz PRF)
Basic detection criteria motivated
by robustness, simple
implementation and interpretation
DART
Design sizing approach
4 λ : 355 , 532 , 1064 & 1550 nm
20 m diameter spot
System altitude 500 km.
3 % of integrated energy
97 % of integrated energy
Max stand height
JAXA - International Workshop on Vegetation Lidar and Application from Space, Kyoto, Japan – 6-7 Jan. 2016 29
First performance results and operating point
Low performances
● For UV and visible linked to low values of both ground and leaves reflectance
● For the lower stands due to a long dead time of the detector (10 ns i.e. 1.5 m
height)
First instrument design sizing based on to 2 scenes (temperate and
tropical forests) and two IR wavelengths.
Measurement noise set for an accumulation over 14 shots at 0,5 m for
the temperate forest
derived lidar product threshold are 0.10mJ.m² at 1.064µm and 0.07mJ.m²
at 1.55µm.
JAXA - International Workshop on Vegetation Lidar and Application from Space, Kyoto, Japan – 6-7 Jan. 2016 30
Budget and conclusions
Operating point: a 0,8 m Ø telescope and
● 200 µJ / shot at 1.064µm
● 140 µJ / shot at 1.55µm
Resulting instrument mass: 220 kg (incl. 25 % margin)
Power budget : 240 Watt (incl. 20 % margin)
Simulations show the viability of such an approach for tree height
determination with metric accuracy for scenes of major interest
including the tropical forests
Limitations of the study
● A full error budget would require to consider additional contributors (e.g.
uncertainty on the atmosphere characteristics and effects linked to the
platform (e.g. pointing, altitude uncertainties))
● Results highly dependent on the method used to estimate height
Same satellite class
than for LEAF
with current FW specifications
JAXA - International Workshop on Vegetation Lidar and Application from Space, Kyoto, Japan – 6-7 Jan. 2016 31
JAXA - International Workshop on Vegetation Lidar and Application from Space, Kyoto, Japan – 6-7 Jan. 2016
Research avenues that could be
explored to improve forest parameters
assessment from Lidar
Promising recent studies using ALS
data
To what extend these approaches can
be transferred to process spaceborne
data?
32
User requirements not always met
with existing ALS based ABA
ABA approaches are widely used to assess forest parameters (Volume, AGB, basal area) from ALS data
Metrics are derived from height and density distributions of ALS echoes
Most explanative metrics are used to build a predictive model
But low robustness level for such approaches
● Metrics are highly correlated
● One model / site
● Insufficient accuracy for complex stands (e.g. multilayered broadleaved
stands), e.g. RMSE > 20% for biomass assessments
Development of new methods to overcome these issues
JAXA - International Workshop on Vegetation Lidar and Application from Space, Kyoto, Japan – 6-7 Jan. 2016 33
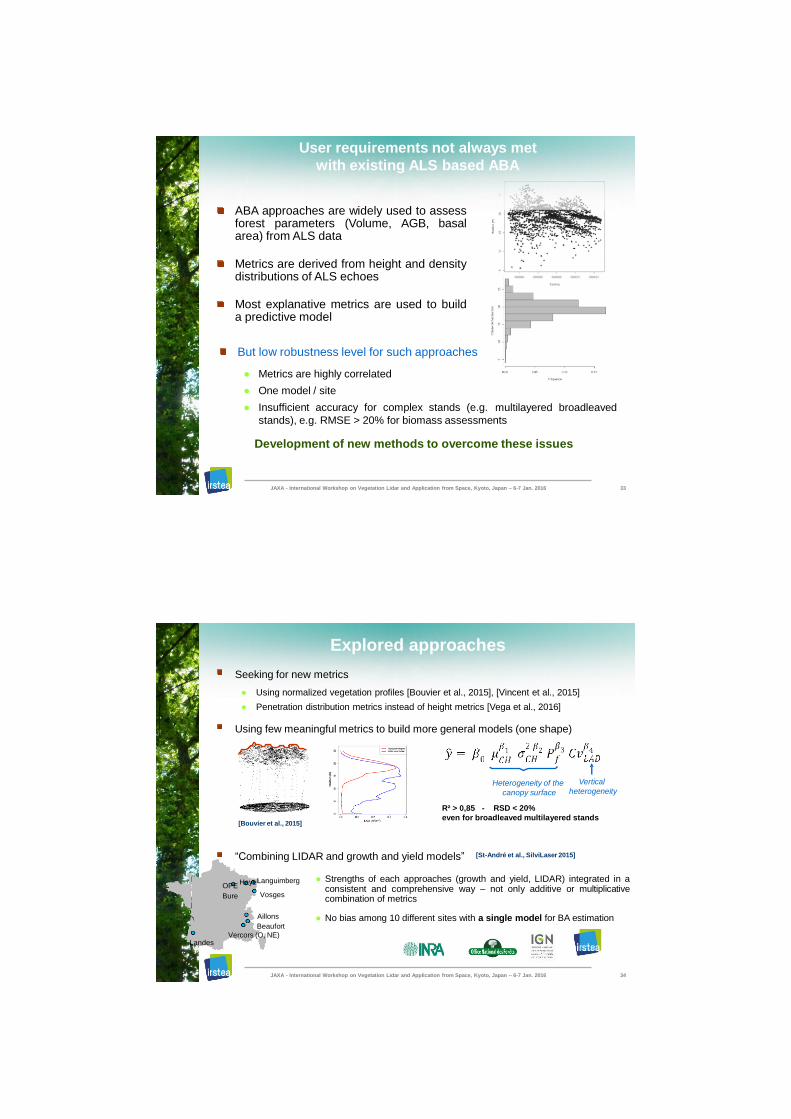
Explored approaches
Seeking for new metrics
● Using normalized vegetation profiles [Bouvier et al., 2015], [Vincent et al., 2015]
● Penetration distribution metrics instead of height metrics [Vega et al., 2016]
Using few meaningful metrics to build more general models (one shape)
“Combining LIDAR and growth and yield models”
[Bouvier et al., 2015]
Heterogeneity of the
canopy surface
RSD < 20%
Vertical
heterogeneity
R² > 0,85 -
even for broadleaved multilayered stands
Aillons
Beaufort
Vercors (O, NE)
JAXA - International Workshop on Vegetation Lidar and Application from Space, Kyoto, Japan – 6-7 Jan. 2016 34
Landes
OPE HayeLanguimberg
Bure Vosges
● Strengths of each approaches (growth and yield, LIDAR) integrated in a consistent and comprehensive way – not only additive or multiplicative combination of metrics
● No bias among 10 different sites with a single model for BA estimation
[St-André et al., SilviLaser 2015]
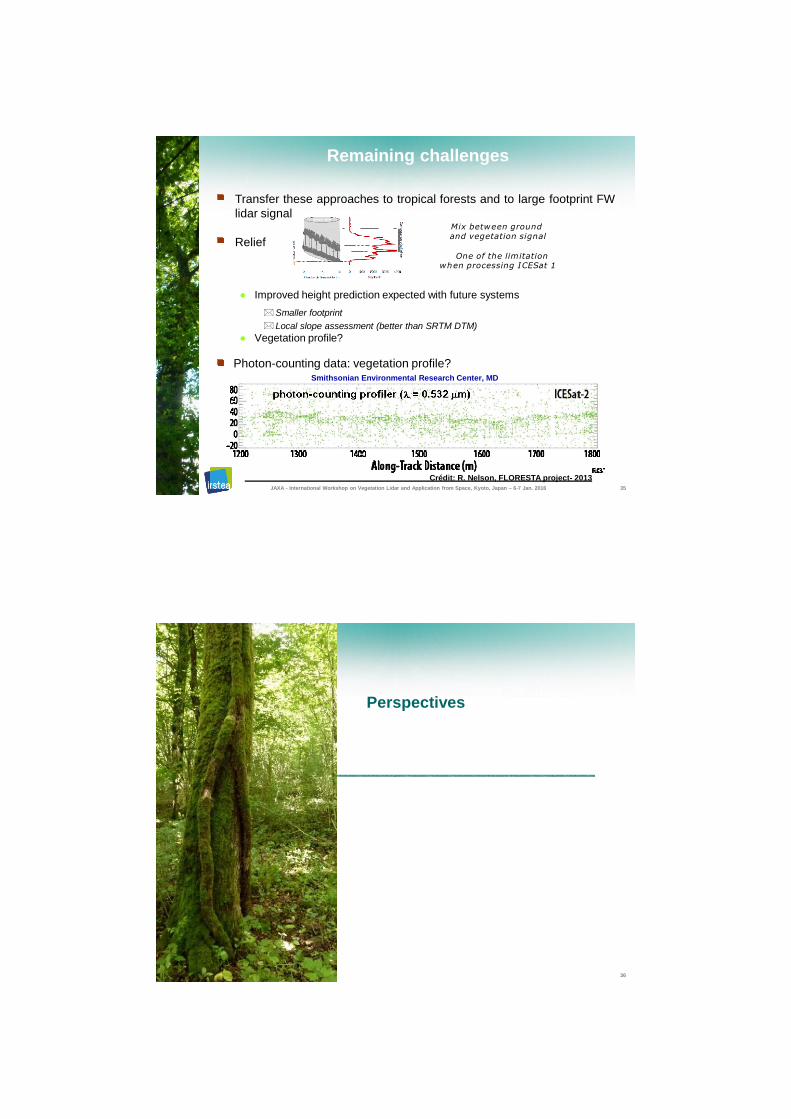
Remaining challenges
Transfer these approaches to tropical forests and to large footprint FW
lidar signal
Relief One of the limitation
when processing ICESat 1
● Improved height prediction expected with future systems
Smaller footprint
Local slope assessment (better than SRTM DTM)
● Vegetation profile?
Photon-counting data: vegetation profile? Smithsonian Environmental Research Center, MD
JAXA - International Workshop on Vegetation Lidar and Application from Space, Kyoto, Japan – 6-7 Jan. 2016 35
Crédit: R. Nelson, FLORESTA project- 2013
Mix between ground and vegetation signal
JAXA - International Workshop on Vegetation Lidar and Application from Space, Kyoto, Japan – 6-7 Jan. 2016
Perspectives
36
n t s
l t s i g n l
C o e t w e e n
S i l
o r n e m e a s u r e m
a t a
a r a c e r i z e a l b r a e d
u f f i n t l
s i c d & h
e n t
+ A n c a r d y l
b r
s i n
s i s t e n
e t n
f m e e r s
S n d c h a r a c t e r s t c s a t
t a p a r e s t o r
e w e b
c y n o
g
C
s e
a l
c
n g
c t e r s t c
e r v e d f r m s a l n g i o d
s h a a r c d n S a
A e m u r e s a F i d m e e l
m o d e s s t a d n d o m T R a l s t c i i e y ” r e c i
a
“ S
d S i m u a e
m u l a t e d & m e a d s g n a s u e r
n c b y e n s i s t
p a c i t y t p a c e m s y s e t s o s z a e a C nadir
(full
l i s
Experiment / Validation step
F e d m e a s u r e m
u l a t e
n t s
+ A n c
ll t
l a a
( f u l l d s y s t e m
“ S u f f i c e n t l y ” r e a l s c
e l d e i n
i
i a l
p r o c e g
C o n s s t
e r s
S n d c h a r a c t e r i s t i c s
S t a n d c h a r a c t e r i s t i c s
d e r
i i
v e d f o m a l
A l o m e t r c r u e l
s g n r
a t
m e t
e t w e n
f s t p a a r e o r
e
c y
b
n e i
s s n
l g
S n g
o m T R
i i ti
s d o m s t a n d
e y c h a r a c t e r i z e & c a i b r a t d
d y i a r
e m
s i g n a l
A i r b o r n e m e u r e a s
d
a l
n s y b e t w
u l a t e d & m e a s u r e m
e e n
S i
c s t n e i o C
i n d s g m
i l e n t s
S i
i
Ai s
il
y c
llometric rules
t t ystem
French Guyana experiment
Sept 2016
JAXA - International Workshop on Vegetation Lidar and Application from Space, Kyoto, Japan – 6-7 Jan. 2016 37
l eling
Si
pro
i i
t i i
i
V
Capacity to size a space system
What can be expected from ICESat2 & GEDI ?
+ Comparison between FW and PC lidars (crossing orbits)
+ Complementarity between green and NIR wavelength
+ Complementarity between BIOMASS and lidar missions to improve biomass
assessments
+ Evaluation of several sampling strategies
- Boreal forests not covered (~ 30% of the world's total forest area)
- The interest of an imager or stereo-imager co-registered with a lidar will not be
evaluated
2000 2010 2020 2030 2040
ICESat (6 years, non continous)
ICESat-2
(5-7 years)
BIOMASS
(5 years)
GEDI (? years)
CESBIO
JAXA - International Workshop on Vegetation Lidar and Application from Space, Kyoto, Japan – 6-7 Jan. 2016 38
MOLI LEAF….
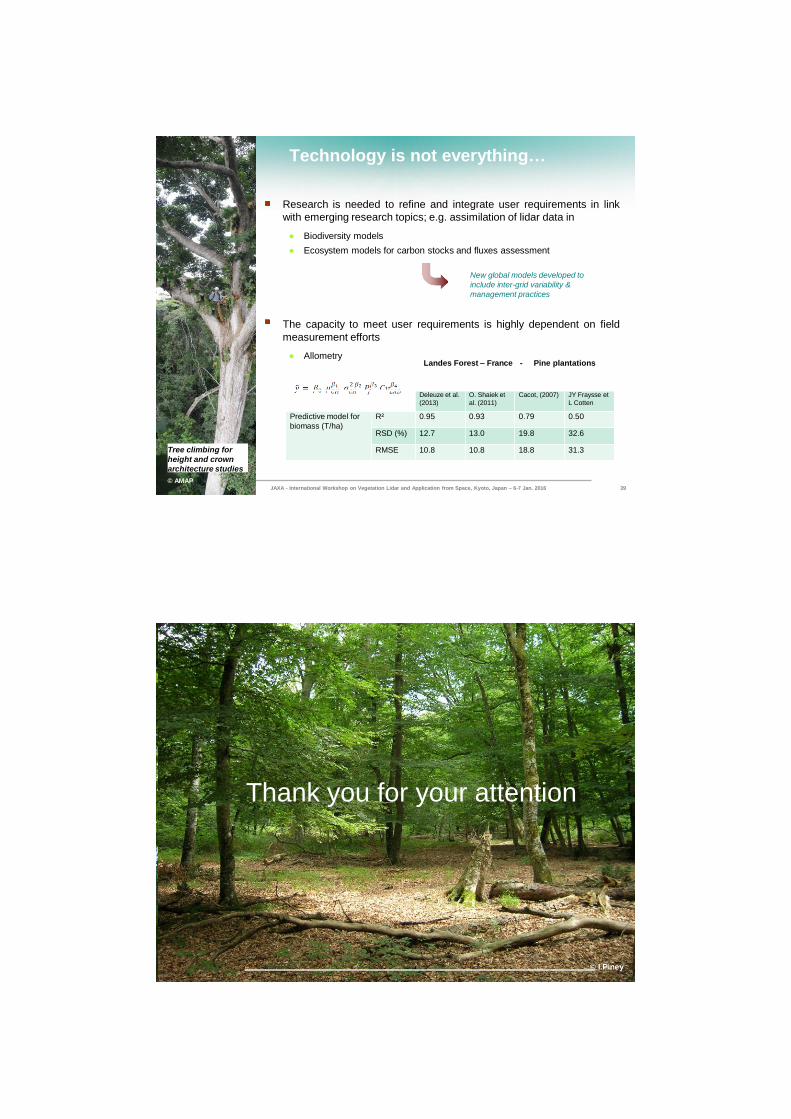
Technology is not everything…
Research is needed to refine and integrate user requirements in link
with emerging research topics; e.g. assimilation of lidar data in
● Biodiversity models
● Ecosystem models for carbon stocks and fluxes assessment
New global models developed to
include inter-grid variability &
management practices
The capacity to meet user requirements is highly dependent on field
measurement efforts
● Allometry
Tree climbing for
height and crown
architecture studies
© AMAP
Résultats Marc
Landes Forest – France - Pine plantations
JAXA - International Workshop on Vegetation Lidar and Application from Space, Kyoto, Japan – 6-7 Jan. 2016 39
Allometric equation
Deleuze et al.
(2013)
O. Shaiek et
al. (2011)
Cacot, (2007) JY Fraysse et
L Cotten
Predictive model for
biomass (T/ha)
R² 0.95 0.93 0.79 0.50
RSD (%) 12.7 13.0 19.8 32.6
RMSE 10.8 10.8 18.8 31.3
JAXA - International Workshop on Vegetation Lidar and Application from Space, Kyoto, Japan – 6-7 Jan. 2016 40
Thank you for your attention
© I.Piney




























