Embed Size (px)
Citation preview
1
ESS210B
Prof. Jin-Y
i Yu
Part 4: T
ime Series II
EO
F Analysis
Principal Com
ponent
Rotated E
OF
Singular Value
Decom
position (SVD
)
ESS210B
Prof. Jin-Y
i Yu
Em
pirical Orthogonal Function A
nalysis
Em
pirical Orthogonal Function (E
OF) analysis attem
pts to find a relatively sm
all number of independent variables
(predictors; factors) which convey as m
uch of the original inform
ation as possible without redundancy.
EO
F analysis can be used to explore the structure of the variability w
ithin a data set in a objective way, and to
analyze relationships within a set of variables.
EO
F analysis is also called principal component analysis
or factor analysis.
ESS210B
Prof. Jin-Y
i Yu
What D
oes EO
F Analysis do?
In brief, EO
F analysis uses a set of orthogonal functions (E
OFs) to represent a tim
e series in the following w
ay:
Z(x,y,t) is the original tim
e series as a function of time (t)
and space (x, y).
EO
F(x, y) show the spatial structures (x, y) of the m
ajor factors that can account for the tem
poral variations of Z.
PC(t) is the principal com
ponent that tells you how the
amplitude of each E
OF varies w
ith time.
ESS210B
Prof. Jin-Y
i Yu
EO
F-1
50%
PC
1
t
19001998
EO
F-2
20%t
PC
2
EO
F-3
••••
9%t
PC
3
EO
F-n
<1%
Feb., 1900
Dec., 1998 •••
Nov., 1998 •
Jan., 1900SST
99 * 12 = 1188 maps
EO
F
Analysis
Principal C
omponent
EO
F (E
igen Vector)
Eigen V
alue
What D
o You G
et from E
OF
?
2
ESS210B
Prof. Jin-Y
i Yu
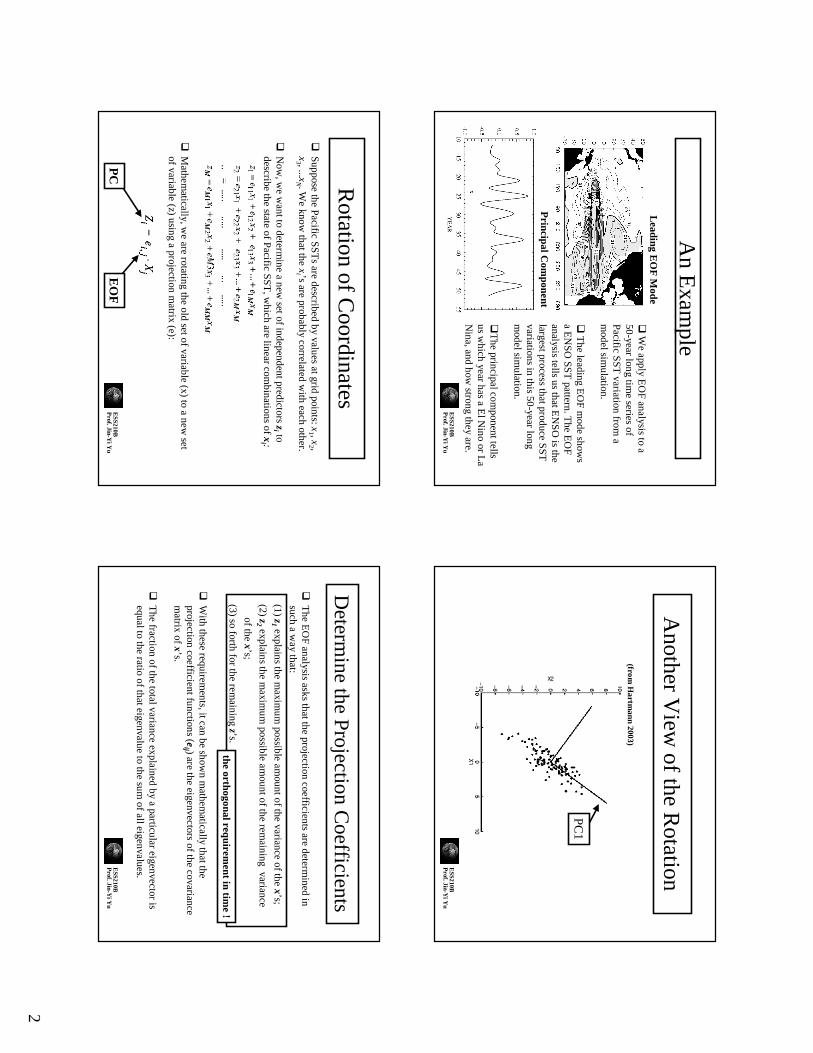
An E
xample
Principal C
omponent
Leading E
OF
Mode
We apply E
OF analysis to a
50-year long time series of
Pacific SST
variation from a
model sim
ulation.
The leading E
OF m
ode shows
a EN
SO SS
T pattern. T
he EO
F analysis tells us that E
NS
O is the
largest process that produce SST
variations in this 50-year long m
odel simulation.
The principal com
ponent tells us w
hich year has a El N
ino or La
Nina, and how
strong they are.
ESS210B
Prof. Jin-Y
i Yu
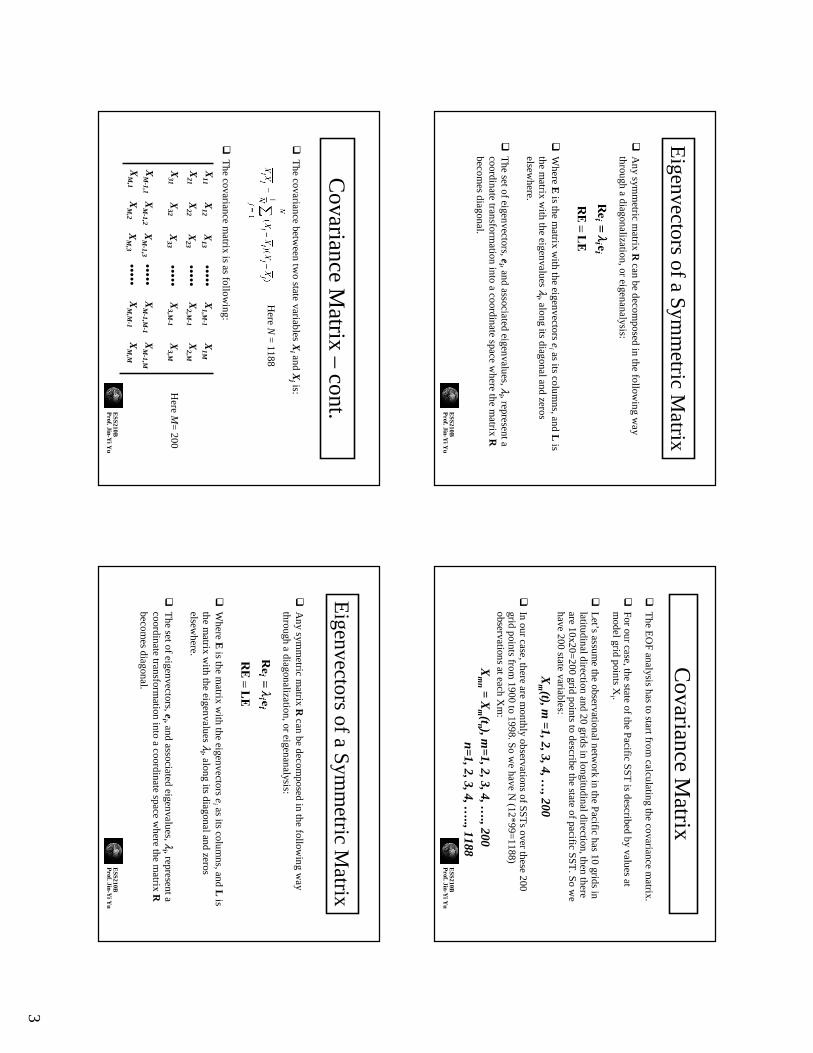
Another V
iew of the R
otation
(from H
artmann 2003)
PC
1
ESS210B
Prof. Jin-Y
i Yu
Rotation of C
oordinates Suppose the Pacific S
STs are described by values at grid points:x
1 , x2 ,
x3 , ...x
N . We know
that thex
i ’s are probably correlated with each other.
Now
, we w
ant to determine a new
set of independent predictors zi to
describe the state of Pacific SST
, which are linear com
binationsof x
i :
Mathem
atically, we are rotating the old set of variable (x) to a
new set
of variable (z) using a projection matrix (e):
PC
EO
FE
SS210BP
rof. Jin-Yi Y
u
Determ
ine the Projection Coefficients
The E
OF analysis asks that the projection coefficients are determ
ined in such a w
ay that:
(1)z
1explains the m
aximum
possible amount of the variance of the x’s;
(2) z2
explains the maxim
um possible am
ount of the remaining variance
of the x’s;
(3) so forth for the remaining z’s.
With these requirem
ents, it can be shown m
athematically that the
projection coefficient functions (eij ) are the eigenvectors of the covariance
matrix of x’s.
The fraction of the total variance explained by a particular eigenvector is
equal to the ratio of that eigenvalueto the sum
of all eigenvalues.
the orthogonal requirement in tim
e !
3
ESS210B
Prof. Jin-Y
i Yu
Eigenvectors of a Sym
metric M
atrix
Any sym
metric m
atrix R can be decom
posed in the following w
ay through a
diagonalization, or eigenanalysis:
Where E
is the matrix w
ith the eigenvectorse
i as its columns, and L
is the m
atrix with the
eigenvalues λi , along its diagonal and zeros
elsewhere.
The set of eigenvectors,e
i , and associatedeigenvalues,λ
i , represent a coordinate transform
ation into a coordinate space where the m
atrix R
becomes diagonal.
ESS210B
Prof. Jin-Y
i Yu
Covariance M
atrixT
he EO
F analysis has to start from calculating the covariance m
atrix.
For our case, the state of the Pacific SST
is described by values at m
odel grid points Xi .
Let’s assum
e the observational network in the Pacific has 10 grids in
latitudinal direction and 20 grids in longitudinal direction, then there are 10x20=
200 grid points to describe the state of pacific SST. S
o we
have 200 state variables:
Xm (t), m
=1, 2, 3, 4, …, 200
In our case, there are monthly observations of SST
s over these 200 grid points from
1900 to 1998. So w
e have N (12*99=
1188) observations at each X
m:
Xm
n=
Xm (tn ), m
=1, 2, 3, 4, …., 200
n=1, 2, 3, 4, ….., 1188
ESS210B
Prof. Jin-Y
i Yu
Covariance M
atrix –cont.
The covariance betw
een two state variables X
i and Xj is:
The covariance m
atrix is as following:
Here N
= 1188
X12
X1,M
-1X
1MX
11X
13•••••
X22
X2,M
-1X
2,MX
21X
23•••••
X32
X3,M
-1X
3,MX
31X
33•••••
XM
-1,2X
M-1,M
-1X
M-1,M
XM
-1,1X
M-1,3
•••••X
M,2
XM
,M-1
XM
,MX
M,1
XM
,3•••••
Here M
= 200
ESS210B
Prof. Jin-Y
i Yu
Eigenvectors of a Sym
metric M
atrix
Any sym
metric m
atrix R can be decom
posed in the following w
ay through a
diagonalization, or eigenanalysis:
Where E
is the matrix w
ith the eigenvectorse
i as its columns, and L
is the m
atrix with the
eigenvalues λi , along its diagonal and zeros
elsewhere.
The set of eigenvectors,e
i , and associatedeigenvalues,λ
i , represent a coordinate transform
ation into a coordinate space where the m
atrix R
becomes diagonal.
4
ESS210B
Prof. Jin-Y
i Yu
Orthogonal C
onstrains
There are orthogonal constrains been build in in the E
OF
analysis:
(1)T
he principal components (PC
s) are orthogonal in time.
There are no sim
ultaneous temporal correlation betw
een any tw
o principal components.
(2) The E
OFs are orthogonal in space.
There are no spatial correlation betw
een any two E
OFs.
The second orthogonal constrain is rem
oved in the rotated E
OF analysis.
ESS210B
Prof. Jin-Y
i Yu
Mathem
atic Background
I don’t want to go through the m
athematical details of E
OF
analysis. Only som
e basic concepts are described in the follow
ing few slids.
Through m
athematic derivations, w
e can show that the
empirical orthogonal functions (E
OFs) of a tim
e series Z(x,
y, t) are the eigenvectors of the covarinace matrix of the
time series.
The eigenvalues
of the covariance matrix tells you the
fraction of variance explained by each individual EO
F.
ESS210B
Prof. Jin-Y
i Yu
Some B
asic Matrix O
perationsA
two-dim
ensional data matrix X
:
The transpose of this m
atrix is XT:
The inner product of these tw
o matrices:
ESS210B
Prof. Jin-Y
i Yu
How
to Get P
rincipal Com
ponents?
If we w
ant to get the principal component, w
e project a single eigenvector onto the data and get an am
plitude of this eigenvector at each tim
e, eTX
:
For example, the am
plitude of EO
F-1 at the first m
easurement tim
e is calculated as the follow
ing:
5
ESS210B
Prof. Jin-Y
i Yu
Using SV
D to G
et EO
F&P
C
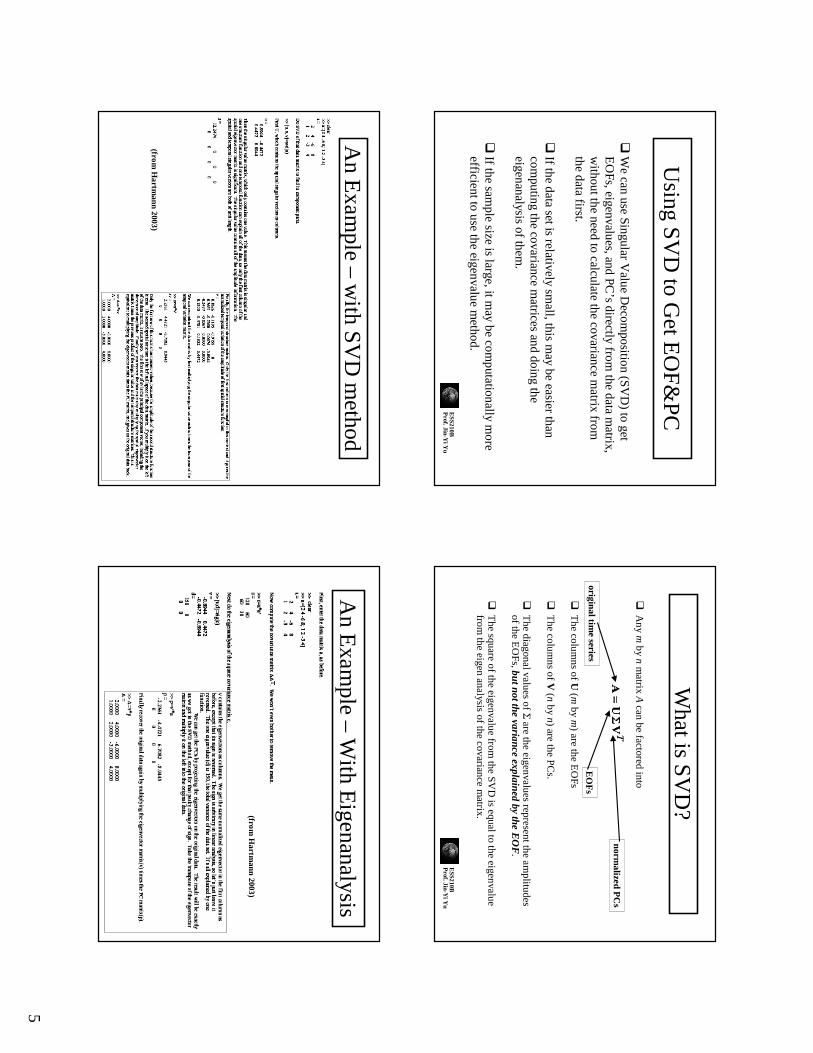
We can use Singular V
alue Decom
position (SVD
) to get E
OFs,eigenvalues, and PC
’s directly from the data m
atrix, w
ithout the need to calculate the covariance matrix from
the data first.
If the data set is relatively small, this m
ay be easier than com
puting the covariance matrices and doing the
eigenanalysisof them
.
If the sample size is large, it m
ay be computationally m
ore efficient to use the
eigenvaluem
ethod.
ESS210B
Prof. Jin-Y
i Yu
What is SV
D?
Any m
by n matrix A
can be factored into
The colum
ns of U (m
by m) are the E
OFs
The colum
ns of V (n by n) are the P
Cs.
The diagonal values of Σ
are the eigenvalues represent the amplitudes
of the EO
Fs, but not the variance explained by the EO
F.
The square of the eigenvalue from
the SVD
is equal to the eigenvalue from
the eigen analysis of the covariance matrix.
original time series
EO
Fs
normalized P
Cs
ESS210B
Prof. Jin-Y
i Yu
An E
xample –
with SV
D m
ethod
(from H
artmann 2003)
ESS210B
Prof. Jin-Y
i Yu
An E
xample –
With E
igenanalysis
(from H
artmann 2003)
6
ESS210B
Prof. Jin-Y
i Yu
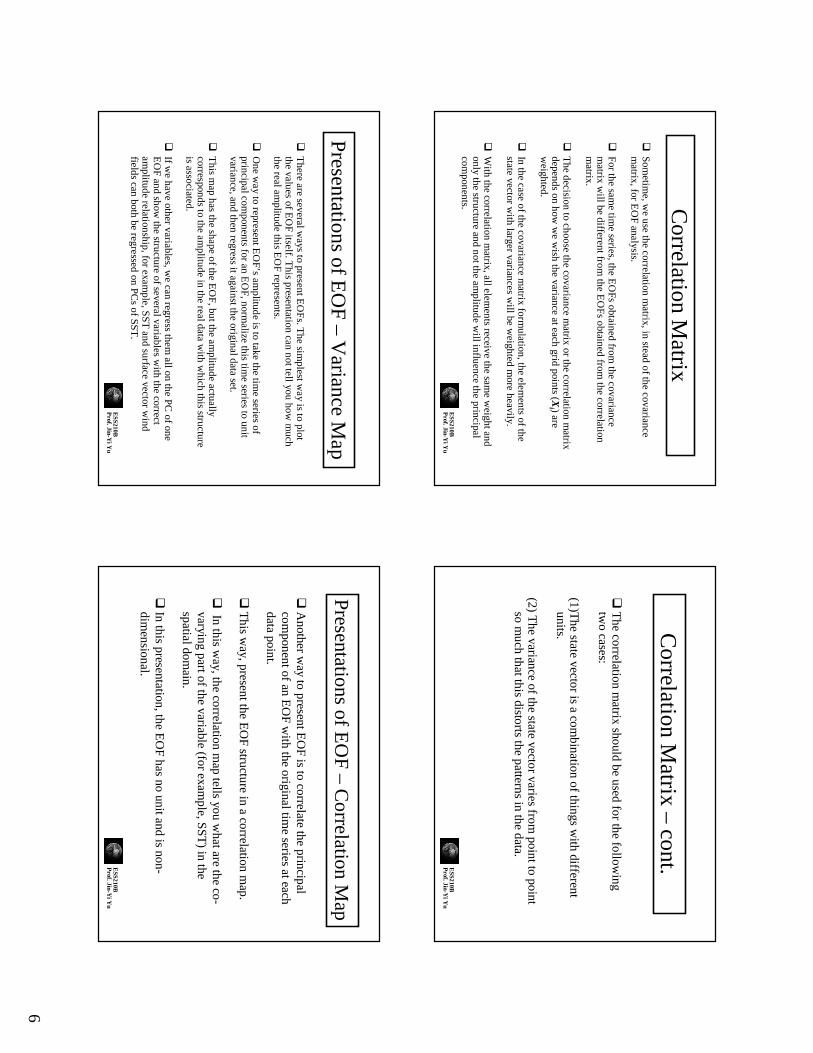
Correlation M
atrixSom
etime, w
e use the correlation matrix, in stead of the covariance
matrix, for E
OF analysis.
For the same tim
e series, the EO
Fsobtained from
the covariance m
atrix will be different from
the EO
Fs obtained from the correlation
matrix.
The decision to choose the covariance m
atrix or the correlation matrix
depends on how w
e wish the variance at each grid points (X
i ) are w
eighted.
In the case of the covariance matrix form
ulation, the elements of the
state vector with larger variances w
ill be weighted m
ore heavily.
With the correlation m
atrix, all elements receive the sam
e weight and
only the structure and not the amplitude w
ill influence the principal com
ponents.E
SS210BP
rof. Jin-Yi Y
u
Correlation M
atrix –cont.
The correlation m
atrix should be used for the following
two cases:
(1)The state vector is a com
bination of things with different
units.
(2) The variance of the state vector varies from
point to point so m
uch that this distorts the patterns in the data.
ESS210B
Prof. Jin-Y
i Yu
Presentations of EO
F –V
ariance Map
There are several w
ays to present EO
Fs. T
he simplest w
ay is to plot the values of E
OF itself. T
his presentation can not tell you howm
uch the real am
plitude this EO
F represents.
One w
ay to represent EO
F’s amplitude is to take the tim
e series of principal com
ponents for an EO
F, normalize this tim
e series to unit variance, and then regress it against the original data set.
This m
ap has the shape of the EO
F, but the amplitude actually
corresponds to the amplitude in the real data w
ith which this structure
is associated.
If we have other variables, w
e can regress them all on the PC
ofone
EO
F and show the structure of several variables w
ith the correctam
plitude relationship, for example, S
ST and surface vector w
indfields can both be regressed on PC
s of SST.
ESS210B
Prof. Jin-Y
i Yu
Presentations of EO
F –C
orrelation Map
Another w
ay to present EO
F is to correlate the principal com
ponent of an EO
F with the original tim
e series at each data point.
This w
ay, present the EO
F structure in a correlation map.
In this way, the correlation m
ap tells you what are the co-
varying part of the variable (for example, SST
) in the spatial dom
ain.
In this presentation, the EO
F has no unit and is non-dim
ensional.
7
ESS210B
Prof. Jin-Y
i Yu
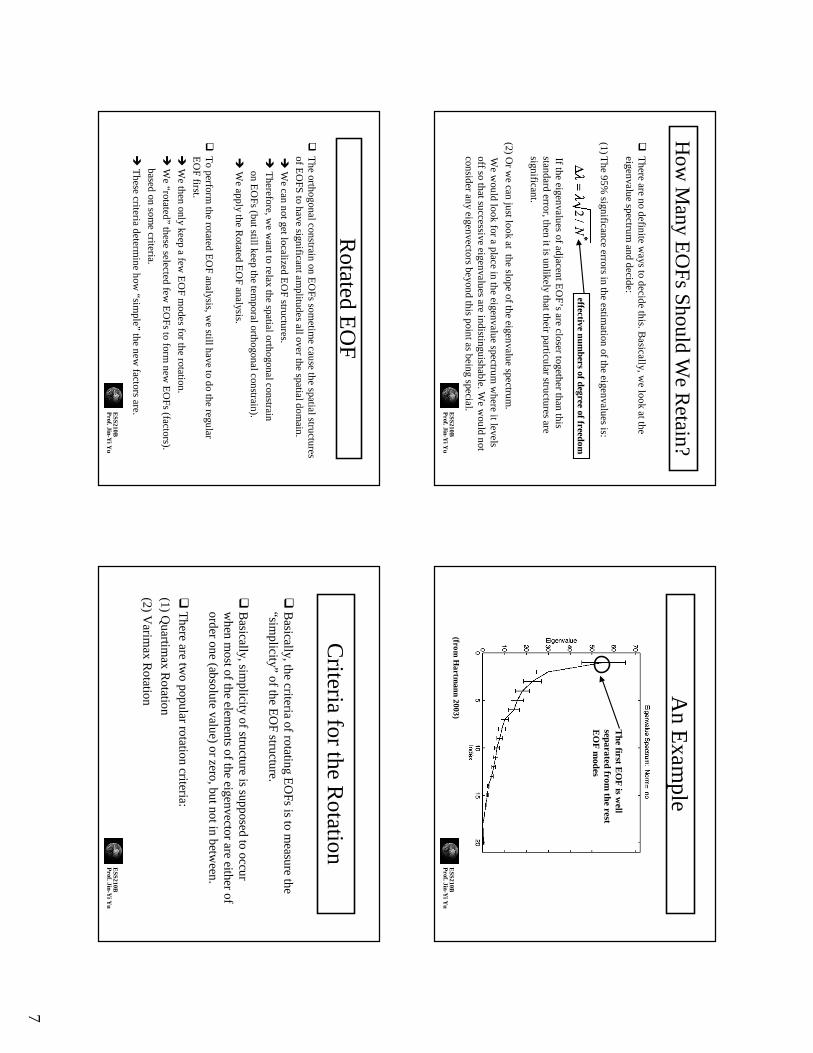
How
Many E
OF
s Should W
e Retain?
There are no definite w
ays to decide this. Basically, w
e look atthe eigenvalue spectrum
and decide:
(1)The 95%
significance errors in the estimation of the eigenvalues is:
If theeigenvalues
of adjacent EO
F’s are closer together than this standard error, then it is unlikely that their particular structures are significant.
(2) Or w
e can just look at the slope of the eigenvalue spectrum.
We w
ould look for a place in theeigenvalue
spectrum w
here it levels off so that successive eigenvalues
are indistinguishable. We w
ould not consider any eigenvectors beyond this point as being special.
effective numbers of degree of freedom
ESS210B
Prof. Jin-Y
i Yu
An E
xample
The first E
OF
is well
separated from the rest
EO
F m
odes
(from H
artmann 2003)
ESS210B
Prof. Jin-Y
i Yu
Rotated E
OF
The orthogonal constrain on E
OFs
sometim
e cause the spatial structures of E
OFS
to have significant amplitudes all over the spatial dom
ain.
We can not get localized E
OF structures.
Therefore, w
e want to relax the spatial orthogonal constrain
on EO
Fs (but still keep the temporal orthogonal constrain).
We apply the R
otated EO
F analysis.
To perform
the rotated EO
F analysis, we still have to do the regular
EO
F first.
We then only keep a few
EO
F modes for the rotation.
We “rotated”
these selected few E
OF
s to form new
EO
Fs (factors).
based on some criteria.
These criteria determ
ine how “sim
ple”the new
factors are.
ESS210B
Prof. Jin-Y
i Yu
Criteria for the R
otation
Basically, the criteria of rotating E
OFs
is to measure the
“simplicity”
of the EO
F structure.
Basically, sim
plicity of structure is supposed to occur w
hen most of the elem
ents of the eigenvector are either of order one (absolute value) or zero, but not in betw
een.
There are tw
o popular rotation criteria:
(1)Q
uartimax
Rotation
(2)V
arimax
Rotation
8
ESS210B
Prof. Jin-Y
i Yu
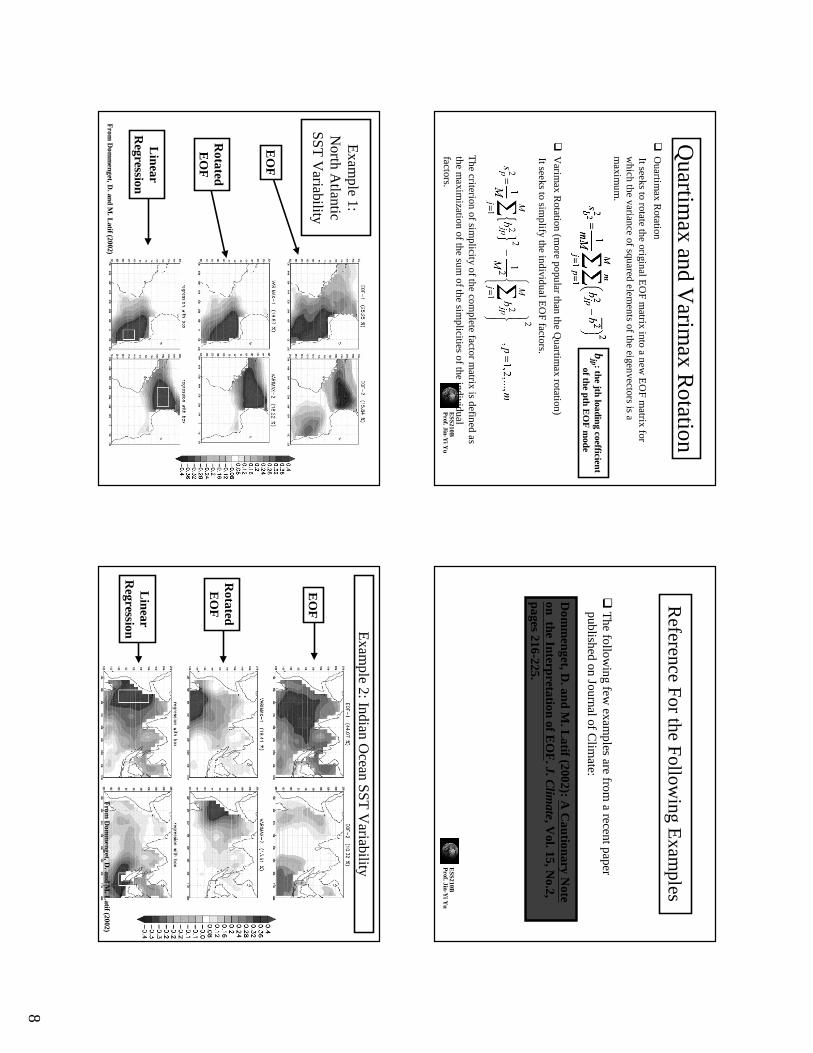
Quartim
ax and Varim
ax Rotation
Ouartim
axR
otation
It seeks to rotate the original EO
F matrix into a new
EO
F matrix for
which the variance of squared elem
ents of the eigenvectors is a m
aximum
.
Varim
ax Rotation (m
ore popular than the Quartim
ax rotation)
It seeks to simplify the individual E
OF factors.
The criterion of sim
plicity of the complete factor m
atrix is defined as the m
aximization of the sum
of the simplicities of the individual
factors.
bjp : the jth loading coefficient
of the pth EO
F m
ode
ESS210B
Prof. Jin-Y
i Yu
Reference F
or the Follow
ing Exam
ples
The follow
ing few exam
ples are from a recent paper
published on Journal of Clim
ate:
Dom
menget, D
. and M.L
atif(2002): A
Cautionary N
ote on
the Interpretation of EO
F. J. C
limate, V
ol. 15, No.2,
pages 216-225.
ESS210B
Prof. Jin-Y
i Yu
Exam
ple 1:N
orth Atlantic
SST V
ariability
RotatedE
OF
Linear
Regression
EO
F
From
Dom
menget, D
. and M.L
atif(2002)E
SS210BP
rof. Jin-Yi Y
u
Exam
ple 2: Indian Ocean SST
Variability
RotatedE
OF
Linear
Regression
EO
F
From
Dom
menget, D
. and M.L
atif(2002)
9
ESS210B
Prof. Jin-Y
i Yu
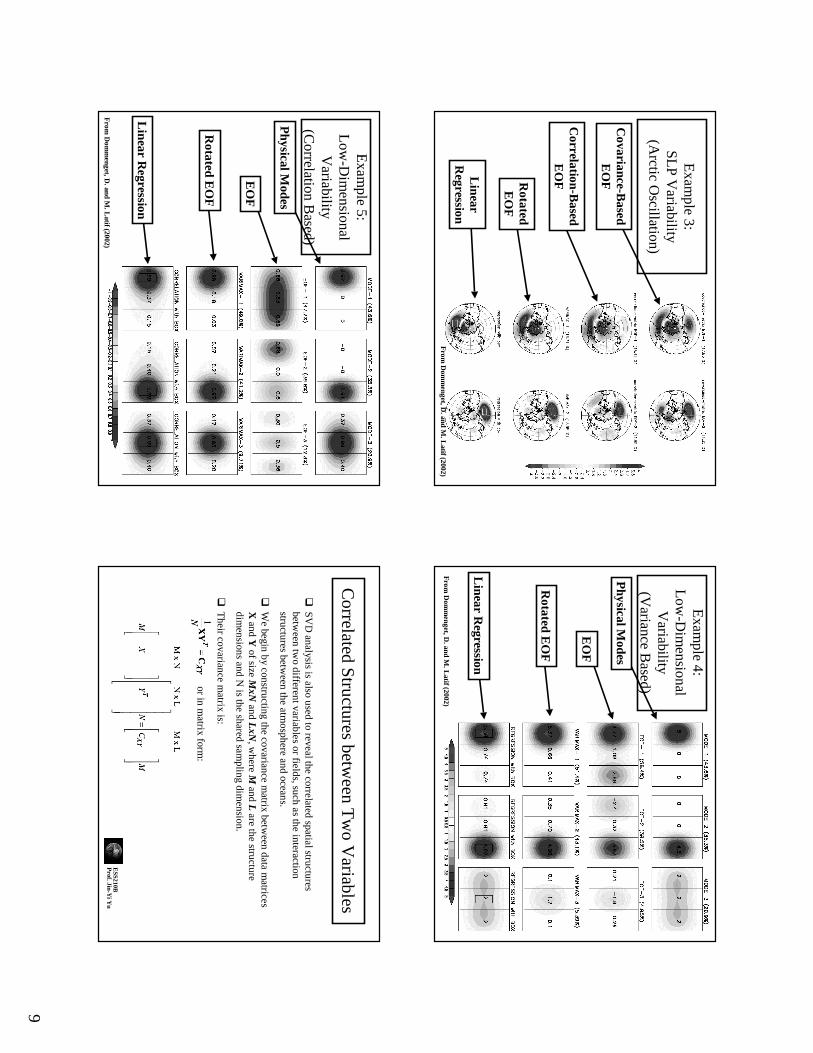
Exam
ple 3:SL
P Variability
(Arctic O
scillation)
RotatedE
OF
Linear
Regression
Covariance-B
asedE
OF
Correlation-B
asedE
OF
From
Dom
menget, D
. and M.L
atif(2002)E
SS210BP
rof. Jin-Yi Y
u
Exam
ple 4:L
ow-D
imensional
Variability
(Variance B
ased)
Rotated E
OF
Linear R
egression
Physical M
odes
EO
F
From
Dom
menget, D
. and M.L
atif(2002)
ESS210B
Prof. Jin-Y
i Yu
Exam
ple 5:L
ow-D
imensional
Variability
(Correlation B
ased)
Rotated E
OF
Linear R
egression
Physical M
odes
EO
F
From
Dom
menget, D
. and M.L
atif(2002)E
SS210BP
rof. Jin-Yi Y
u
Correlated S
tructures between T
wo V
ariables
SVD
analysis is also used to reveal the correlated spatial structures betw
een two different variables or fields, such as the interaction
structures between the atm
osphere and oceans.
We begin by constructing the covariance m
atrix between data m
atrices X
and Y of size
MxN
andL
xN, w
here Mand L
are the structure dim
ensions and N is the shared sam
pling dimension.
Their covariance m
atrix is:
or in matrix form
:
10
ESS210B
Prof. Jin-Y
i Yu
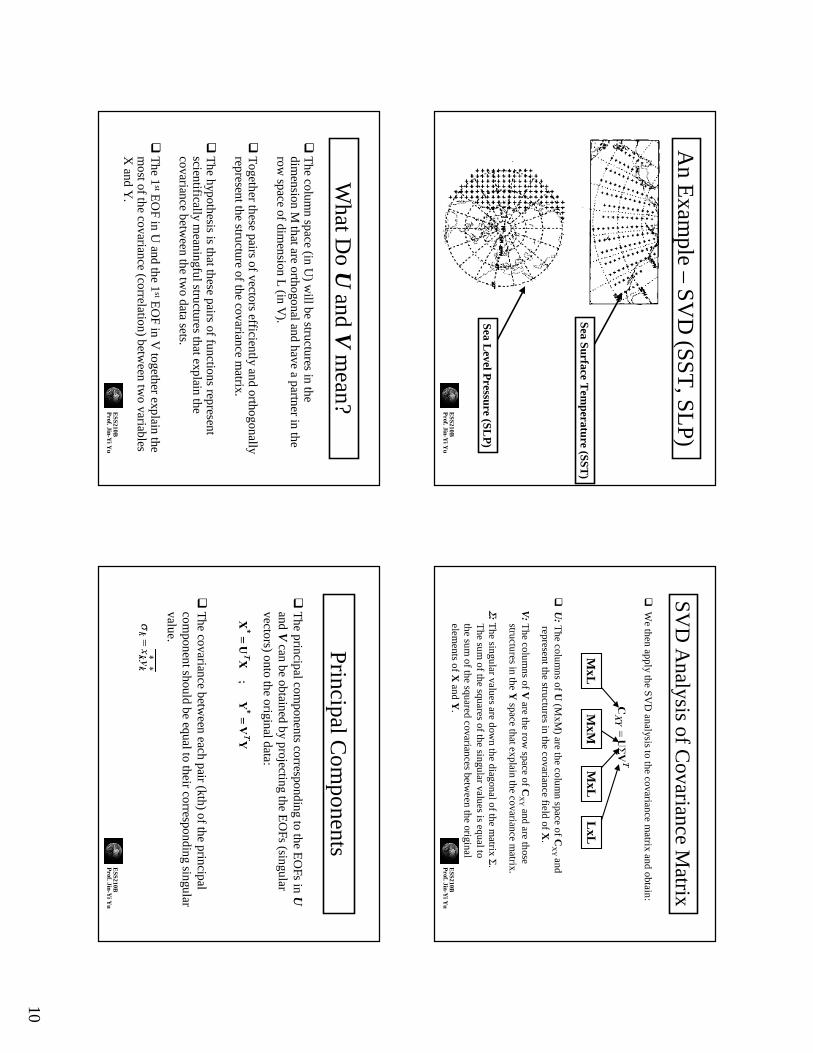
An E
xample –
SV
D (SST
, SLP)
Sea Surface Tem
perature (SST)
Sea Level P
ressure (SLP
)
ESS210B
Prof. Jin-Y
i Yu
SV
D A
nalysis of Covariance M
atrix
We then apply the S
VD
analysis to the covariance matrix and obtain:
U:
The colum
ns of U(M
xM) are the colum
n space of CX
Y and
represent the structures in the covariance field of X.
V:
The colum
ns of V are the row
space of CX
Yand are those
structures in the Y space that explain the covariance m
atrix.
Σ:
The singular values are dow
n the diagonal of the matrix Σ
. T
he sum of the squares of the singular values is equalto
the sum of the squared covariances
between the original
elements of X
and Y.
MxL
MxM
MxL
LxL
ESS210B
Prof. Jin-Y
i Yu
What D
o Uand V
mean?
The colum
n space (in U) w
ill be structures in the dim
ension M that are orthogonal and have a partner in the
row space of dim
ension L (in V
).
Together these pairs of vectors efficiently and
orthogonallyrepresent the structure of the covariance m
atrix.
The hypothesis is that these pairs of functions represent
scientifically meaningful structures that explain the
covariance between the tw
o data sets.
The 1
stEO
F in U and the 1
stEO
F in V together explain the
most of the covariance (correlation) betw
een two variables
X and Y
.E
SS210BP
rof. Jin-Yi Y
u
Principal Com
ponents
The principal com
ponents corresponding to the EO
Fs in Uand V
can be obtained by projecting the EO
Fs (singular vectors) onto the original data:
The covariance betw
een each pair (kth) of the principal com
ponent should be equal to their corresponding singular value.
11
ESS210B
Prof. Jin-Y
i Yu
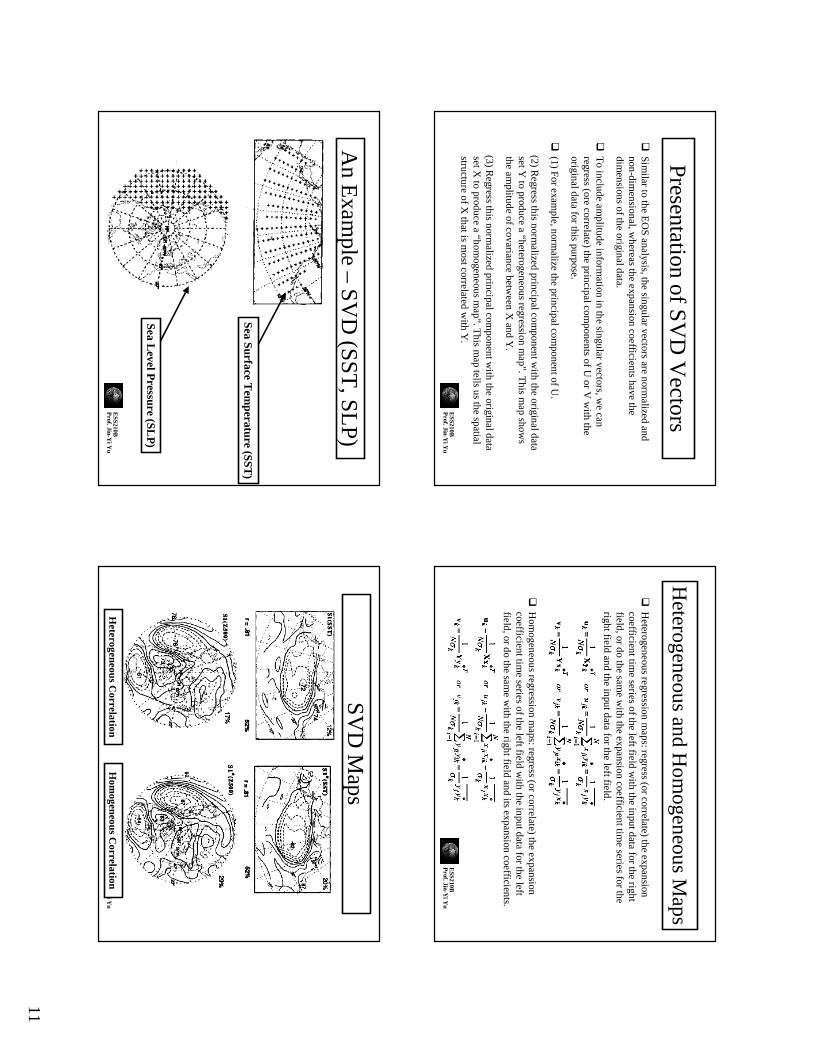
Presentation of SV
D V
ectorsSim
ilar to the EO
S analysis, the singular vectors are norm
alizedand
non-dimensional, w
hereas the expansion coefficients have the dim
ensions of the original data.
To include am
plitude information in the singular vectors, w
e canregress (ore correlate) the principal com
ponents of U or V
with the
original data for this purpose.
(1) For example, norm
alize the principal component of U
.
(2) Regress this norm
alized principal component w
ith the original data set Y
to produce a “heterogeneous regression map”. T
his map show
s the am
plitude of covariance between X
and Y.
(3) Regress this norm
alized principal component w
ith the original data set X
to produce a “homogeneous m
ap”. This m
ap tells us the spatial structure of X
that is most correlated w
ith Y.
ESS210B
Prof. Jin-Y
i Yu
Heterogeneous and H
omogeneous M
aps
Heterogeneous regression m
aps: regress (or correlate) the expansion coefficient tim
e series of the left field with the input data for the right
field, or do the same w
ith the expansion coefficient time series
for the right field and the input data for the left field.
Hom
ogeneous regression maps: regress (or correlate) the expansion
coefficient time series of the left field w
ith the input data for the left field, or do the sam
e with the right field and its expansion coefficients.
ESS210B
Prof. Jin-Y
i Yu
An E
xample –
SV
D (SST
, SLP)
Sea Surface Tem
perature (SST)
Sea Level P
ressure (SLP
)
ESS210B
Prof. Jin-Y
i Yu
SVD
Maps
Heterogeneous C
orrelationH
omogeneous C
orrelation

12
ESS210B
Prof. Jin-Y
i Yu
How
to Use M
atlab to do SVD
?
See pages 27-28 of the paper “A m
anual for E
OF and SV
D analysis of clim
ate data”by
Bjornsson
and Venegas.





























