Embed Size (px)
Citation preview

Where Is the Highest Point on the Roof of a Shed?Author(s): Ysbrand de BruynSource: The Mathematics Teacher, Vol. 96, No. 4 (APRIL 2003), pp. 286-290Published by: National Council of Teachers of MathematicsStable URL: http://www.jstor.org/stable/20871312 .
Accessed: 10/05/2014 12:30
Your use of the JSTOR archive indicates your acceptance of the Terms & Conditions of Use, available at .http://www.jstor.org/page/info/about/policies/terms.jsp
.JSTOR is a not-for-profit service that helps scholars, researchers, and students discover, use, and build upon a wide range ofcontent in a trusted digital archive. We use information technology and tools to increase productivity and facilitate new formsof scholarship. For more information about JSTOR, please contact [email protected].
.
National Council of Teachers of Mathematics is collaborating with JSTOR to digitize, preserve and extendaccess to The Mathematics Teacher.
http://www.jstor.org
This content downloaded from 2.235.137.19 on Sat, 10 May 2014 12:30:42 PMAll use subject to JSTOR Terms and Conditions
Ysbrand de Bruyn
Where Is the Highest Point on the Roof of a Shed?
s
He had no idea why the simplex
method worked
ome time ago, a freshman engineering student re
turned to the high school where I taught and de scribed to me some of his struggles with university mathematics. The simplex method of linear pro gramming was one topic that we discussed. This student could perform the mechanics of the simplex
method?finding pivot columns, pivot rows, and row
reductions; however, he confessed that he had no
idea why the simplex method worked to find the maximum point. Moreover, he could not connect the theorems that his professor proved in the lectures with the simplex method. So I asked him this ques tion: "Where is the highest point on the roof, excluding the overhang, of a shed with a plane, but
sloping, roof?" He looked at me and was clearly wondering why sheds had anything to do with lin ear programming.
Following that conversation, I have used the model of a flat-roofed shed with my classes to ex
plain the concepts underlying linear programming. Not only does the model provide the student with a
geometric interpretation that indicates why the maximum (or minimum) value of the objective func tion should occur at a corner point, but it also helps the student visualize why the steps in the simplex method lead to the maximum point.
A SIMPLE OPTIMIZATION QUESTION We consider the linear-programming problem of
maximizing the objective function = 25x + 17y, subject to the following constraints:
jc+y<100 5* + 3y < 380
x>0
y>0
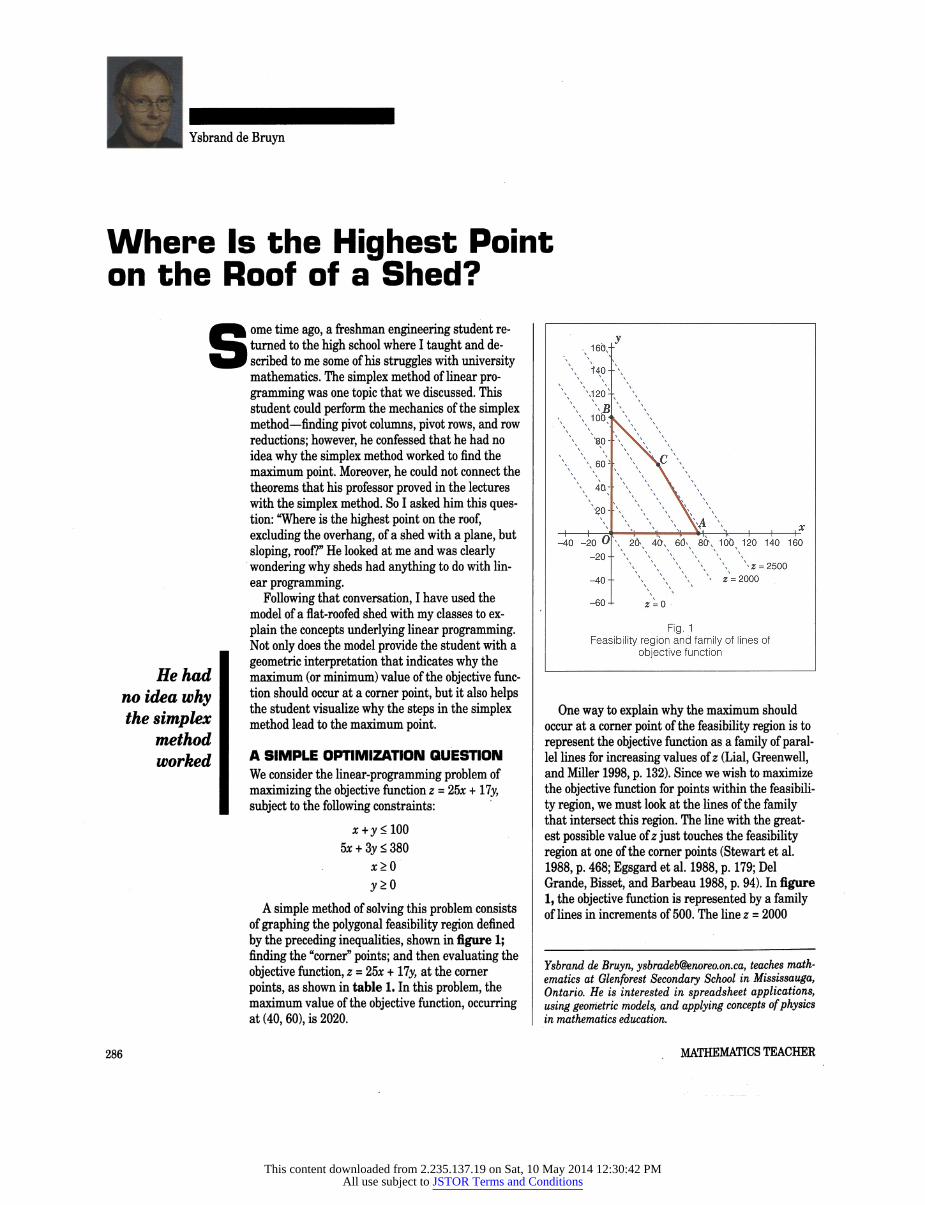
A simple method of solving this problem consists of graphing the polygonal feasibility region defined by the preceding inequalities, shown in figure 1; finding the "corner" points; and then evaluating the
objective function, = 25x + 17y, at the corner
points, as shown in table 1. In this problem, the maximum value of the objective function, occurring at (40,60), is 2020.
-40 +
-60-L
H -h 2fc 40, 60* 80\ 10? 120 140 160
\ *z = 2500
z = 2000
2 = 0
Fig. 1 Feasibility region and family of lines of
objective function
One way to explain why the maximum should occur at a corner point of the feasibility region is to
represent the objective function as a family of paral lel lines for increasing values of (Liai, Greenwell, and Miller 1998, p. 132). Since we wish to maximize the objective function for points within the feasibili
ty region, we must look at the lines of the family that intersect this region. The line with the great est possible value of just touches the feasibility region at one of the corner points (Stewart et al.
1988, p. 468; Egsgard et al. 1988, p. 179; Del Grande, Bisset, and Barbeau 1988, p. 94). In figure 1, the objective function is represented by a family of lines in increments of 500. The line = 2000
Ysbrand de Bruyn, [email protected], teaches math
ematics at Glenforest Secondary School in Mississauga, Ontario. He is interested in spreadsheet applications, using geometric models, and applying concepts of physics in mathematics education.
286 MATHEMATICS TEACHER
This content downloaded from 2.235.137.19 on Sat, 10 May 2014 12:30:42 PMAll use subject to JSTOR Terms and Conditions
crosses the region just inside point C, so the line = 2020 intersects the region only at C.
A SHED AS PHYSICAL MODEL Another way of looking at this problem is to build a three-dimensional physical model of the linear
programming problem. Once assembled, the model
looks like a "shed" with a plane, but sloping, roof. The objective function is the equation of a plane. It
is represented by the flat "roof of the shed, where the value of the objective function is the height of the roof above the x-y plane. The "floor plan" of the shed is the feasibility region, with the boundary line segments of the feasibility region forming the "walls" of the shed.
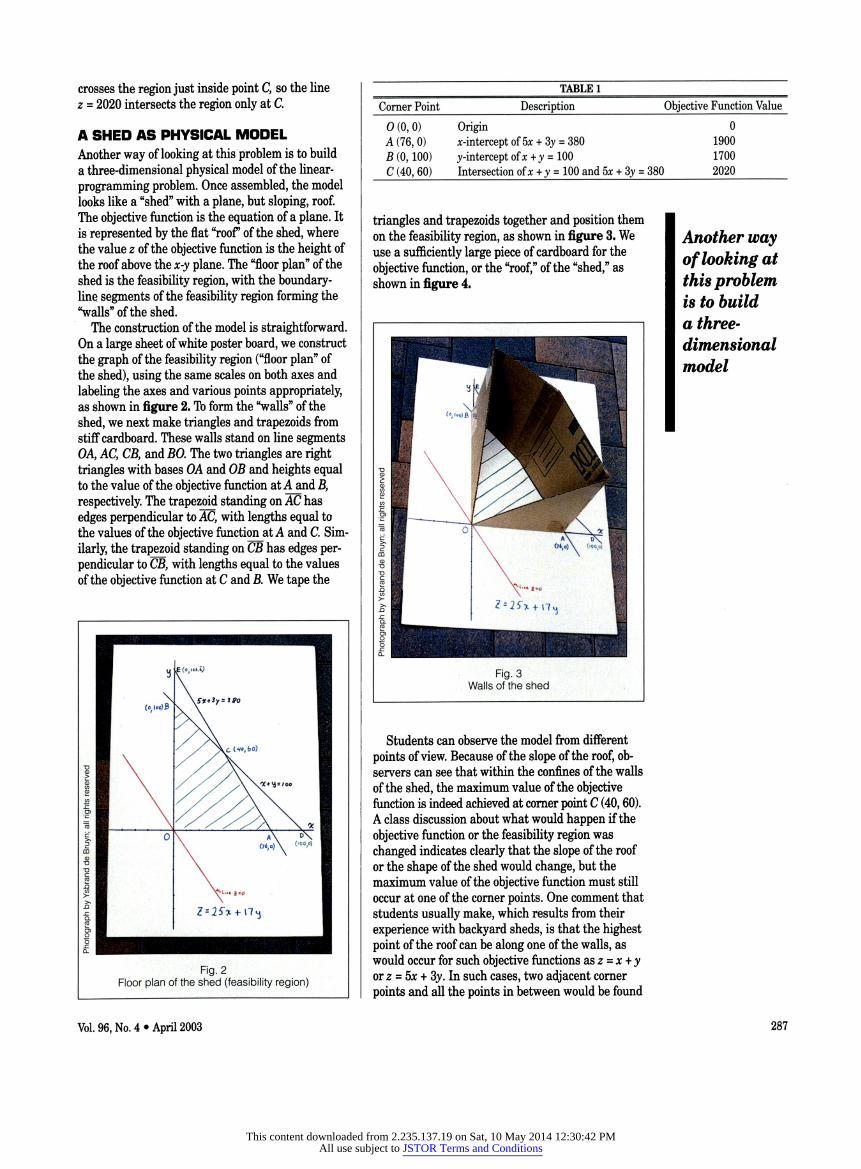
The construction of the model is straightforward. On a large sheet of white poster board, we construct the graph of the feasibility region ("floor plan" of the shed), using the same scales on both axes and
labeling the axes and various points appropriately, as shown in figure 2. lb form the "walls" of the
shed, we next make triangles and trapezoide from stiff cardboard. These walls stand on line segments OA, AC, CB, and BO. The two triangles are right triangles with bases OA and OB and heights equal to the value of the objective function at A and B,
respectively. The trapezoid standing on AC has
edges perpendicular to AC, with lengths equal to the values of the objective function at A and C. Sim
ilarly, the trapezoid standing on CB has edges per
pendicular to CB, with lengths equal to the values of the objective function at C and B. We tape the
Fig. 2 Floor plan of the shed (feasibility region)
_TABLE 1_ Corner Point_Description_Objective Function Value
0(0,0) Origin 0 A (76,0) *-interceptof5x + 3y = 380 1900
(0,100) y-intercept of +y = 100 1700 C (40,60) Intersection of + y = 100 and 5* + 3y = 380_2020_
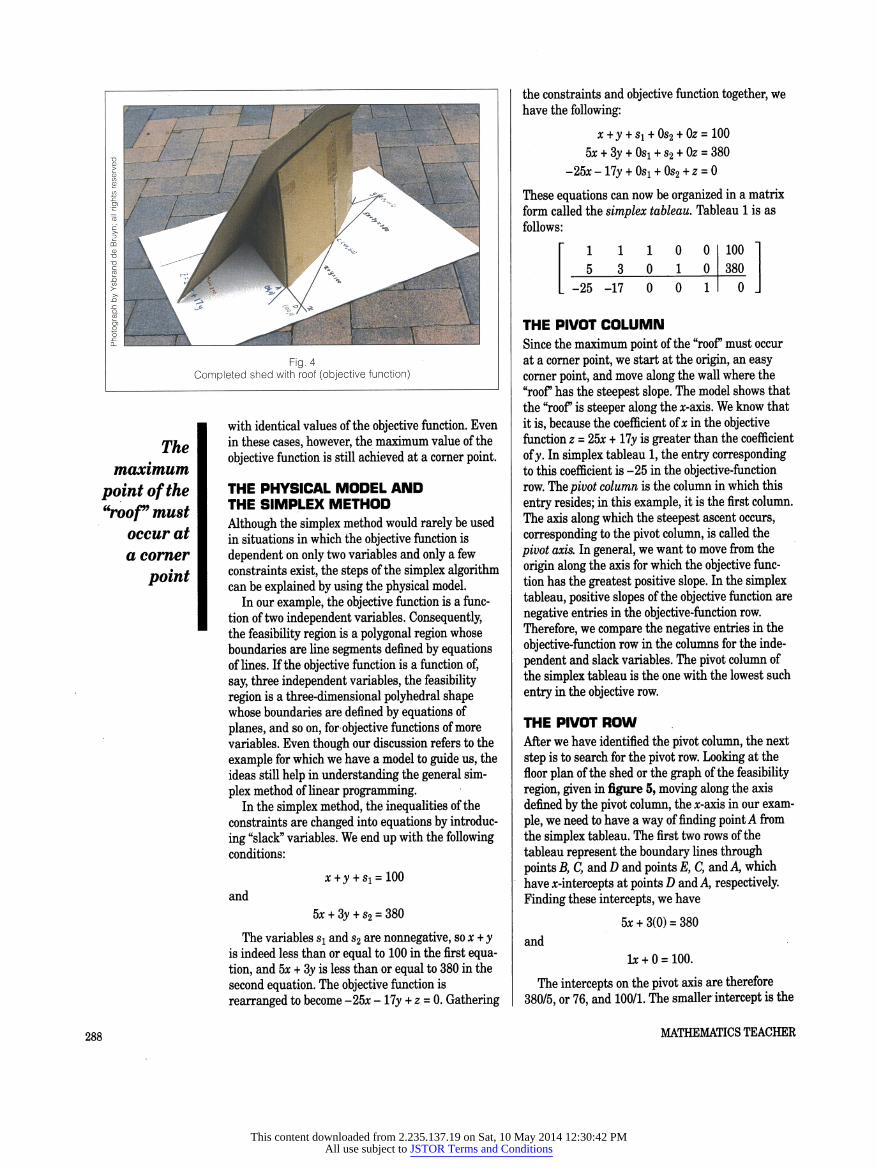
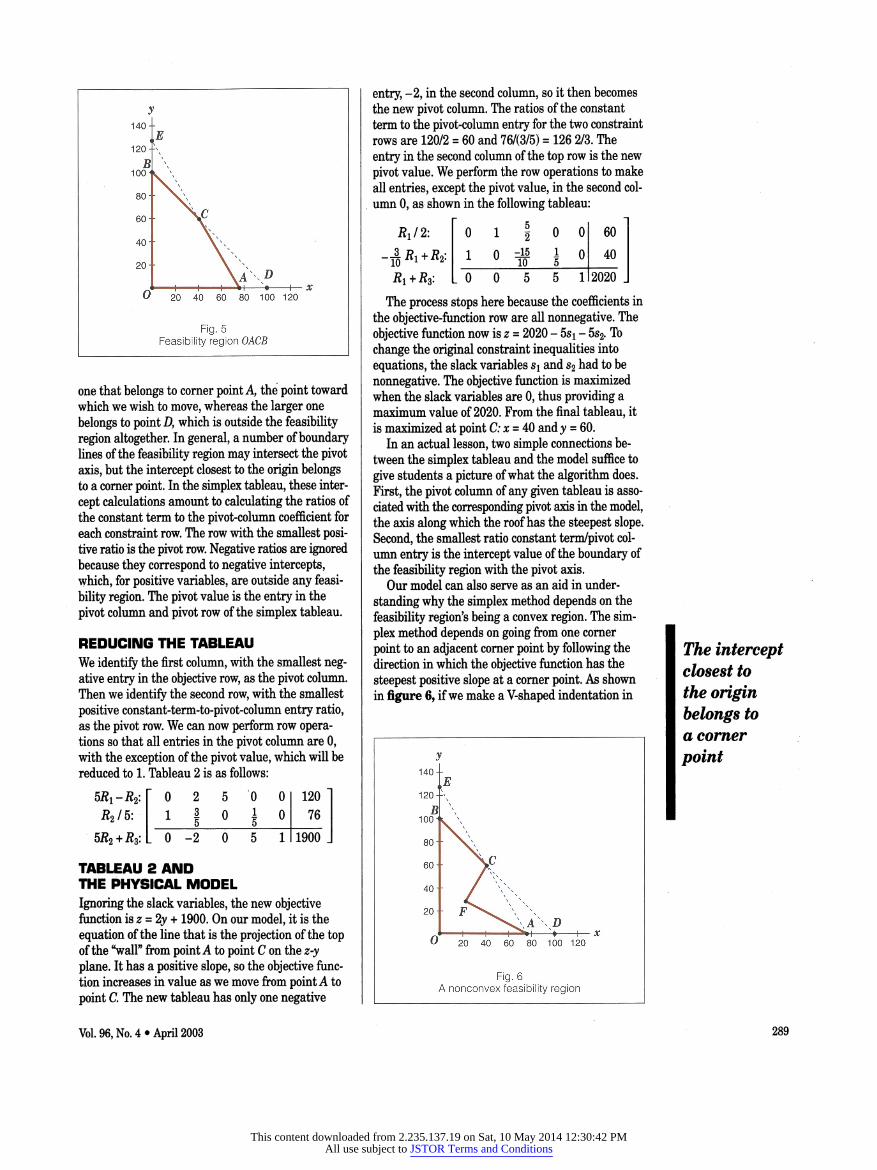
triangles and trapezoids together and position them on the feasibility region, as shown in figure 3. We use a sufficiently large piece of cardboard for the
objective function, or the "roof," of the "shed," as
shown in figure 4.
Another way of looking at this problem is to build a three
dimensional
model
Students can observe the model from different
points of view. Because of the slope of the roof, ob servers can see that within the confines of the walls
of the shed, the maximum value of the objective function is indeed achieved at corner point C (40,60).
A class discussion about what would happen if the
objective function or the feasibility region was
changed indicates clearly that the slope of the roof or the shape of the shed would change, but the maximum value of the objective function must still occur at one of the corner points. One comment that students usually make, which results from their
experience with backyard sheds, is that the highest point of the roof can be along one of the walls, as would occur for such objective functions as = + y or = 5x + 3y. In such cases, two adjacent corner
points and all the points in between would be found
Vol. 96, No. 4? April 2003 287
This content downloaded from 2.235.137.19 on Sat, 10 May 2014 12:30:42 PMAll use subject to JSTOR Terms and Conditions
The maximum
point of the
"roof must occur at a corner
point
with identical values of the objective function. Even in these cases, however, the maximum value of the
objective function is still achieved at a corner point.
THE PHYSICAL MODEL AND THE SIMPLEX METHOD Although the simplex method would rarely be used in situations in which the objective function is
dependent on only two variables and only a few
constraints exist, the steps of the simplex algorithm can be explained by using the physical model.
In our example, the objective function is a func tion of two independent variables. Consequently, the feasibility region is a polygonal region whose boundaries are line segments defined by equations of lines. If the objective function is a function of, say, three independent variables, the feasibility region is a three-dimensional polyhedral shape whose boundaries are defined by equations of
planes, and so on, for objective functions of more
variables. Even though our discussion refers to the
example for which we have a model to guide us, the
ideas still help in understanding the general sim
plex method of linear programming. In the simplex method, the inequalities of the
constraints are changed into equations by introduc
ing "slack" variables. We end up with the following conditions:
and ?C+y + s1 = 100
5x + 3y + s2 = 380
The variables Si and s2 are nonnegative, so + y is indeed less than or equal to 100 in the first equa tion, and 5x + 3y is less than or equal to 380 in the second equation. The objective function is
rearranged to become -25x - 17y + = 0. Gathering
the constraints and objective function together, we have the following:
x+y + S! + 0s2 + 0? = 100
5x + 3y + Osi + s2 + Oz = 380
-25*-17y + 0si + 0s2 + 2 = 0
These equations can now be organized in a matrix
form called the simplex tableau. Tableau 1 is as
follows:
1
0
100 380
-25 -17 0 0 1 I 0 J
THE PIVOT COLUMN Since the maximum point of the "roof must occur
at a corner point, we start at the origin, an easy corner point, and move along the wall where the "roof has the steepest slope. The model shows that
the "roof is steeper along the jc-axis. We know that
it is, because the coefficient of in the objective function = 25x + 17y is greater than the coefficient
of y. In simplex tableau 1, the entry corresponding to this coefficient is -25 in the objective-function row. The pivot column is the column in which this
entry resides; in this example, it is the first column.
The axis along which the steepest ascent occurs,
corresponding to the pivot column, is called the
pivot axis. In general, we want to move from the
origin along the axis for which the objective func
tion has the greatest positive slope. In the simplex tableau, positive slopes of the objective function are
negative entries in the objective-function row.
Therefore, we compare the negative entries in the
objective-function row in the columns for the inde
pendent and slack variables. The pivot column of
the simplex tableau is the one with the lowest such
entry in the objective row.
THE PIVOT ROW After we have identified the pivot column, the next
step is to search for the pivot row. Looking at the floor plan of the shed or the graph of the feasibility region, given in figure 5, moving along the axis defined by the pivot column, the jc-axis in our exam
ple, we need to have a way of finding point A from
the simplex tableau. The first two rows of the
tableau represent the boundary lines through
points B, C, and D and points E, C, and A, which
have ^-intercepts at points D and A, respectively. Finding these intercepts, we have
and
5x + 3(0) = 380
ls + 0 = 100.
The intercepts on the pivot axis are therefore
380/5, or 76, and 100/1. The smaller intercept is the
MATHEMATICS TEACHER
This content downloaded from 2.235.137.19 on Sat, 10 May 2014 12:30:42 PMAll use subject to JSTOR Terms and Conditions
A D -4-1?
20 40 60 80 100 120
Fig. 5
Feasibility region OACB
one that belongs to corner point A, the point toward which we wish to move, whereas the larger one
belongs to point D, which is outside the feasibility region altogether. In general, a number of boundary lines of the feasibility region may intersect the pivot axis, but the intercept closest to the origin belongs to a corner point. In the simplex tableau, these inter
cept calculations amount to calculating the ratios of
the constant term to the pivot-column coefficient for each constraint row. The row with the smallest posi tive ratio is the pivot row. Negative ratios are ignored because they correspond to negative intercepts, which, for positive variables, are outside any feasi
bility region. The pivot value is the entry in the pivot column and pivot row of the simplex tableau.
REDUCING THE TABLEAU We identify the first column, with the smallest neg ative entry in the objective row, as the pivot column. Then we identify the second row, with the smallest
positive constant-term-to-pivot-column entry ratio, as the pivot row. We can now perform row opera tions so that all entries in the pivot column are 0, with the exception of the pivot value, which will be reduced to 1. Tableau 2 is as follows:
5i?i ? R2.
R2/5:
5R2 + ?3:
0 2 5 0 0 1 I 0 ? 0 0 -2
120 76
1900 J
TABLEAU 2 AND THE PHYSICAL MODEL Ignoring the slack variables, the new objective function is = 2y + 1900. On our model, it is the
equation of the line that is the projection of the top of the "wall" from point A to point C on the z-y
plane. It has a positive slope, so the objective func tion increases in value as we move from point A to
point C. The new tableau has only one negative
entry, -2, in the second column, so it then becomes the new pivot column. The ratios of the constant term to the pivot-column entry for the two constraint rows are 120/2 = 60 and 76/(3/5) = 126 2/3. The entry in the second column of the top row is the new
pivot value. We perform the row operations to make all entries, except the pivot value, in the second col umn 0, as shown in the following tableau:
RJ2: 1
0 $ 0 1 5
0 0 1
60
40
2020 J
The process stops here because the coefficients in
the objective-function row are all nonnegative. The
objective function now is = 2020 - 5si -
5s2. To
change the original constraint inequalities into
equations, the slack variables s_ and s2 had to be
nonnegative. The objective function is maximized when the slack variables are 0, thus providing a
maximum value of 2020. From the final tableau, it is maximized at point C: = 40 and y = 60.
In an actual lesson, two simple connections be tween the simplex tableau and the model suffice to
give students a picture of what the algorithm does.
First, the pivot column of any given tableau is asso
ciated with the corresponding pivot axis in the model, the axis along which the roof has the steepest slope. Second, the smallest ratio constant term/pivot col umn entry is the intercept value of the boundary of the feasibility region with the pivot axis.
Our model can also serve as an aid in under
standing why the simplex method depends on the feasibility region's being a convex region. The sim
plex method depends on going from one corner
point to an adjacent corner point by following the direction in which the objective function has the
steepest positive slope at a corner point. As shown in figure 6, if we make a V-shaped indentation in
y 140
120 E
i\A\D 20 40 60 80 100 120
Fig. 6 A nonconvex feasibility region
The intercept closest to
the origin belongs to a corner
point
Vol. 96, No. 4? April 2003 289
This content downloaded from 2.235.137.19 on Sat, 10 May 2014 12:30:42 PMAll use subject to JSTOR Terms and Conditions

the feasibility region of the linear-programming example that we discussed between points A and C in figure 1, we easily see that the maximum value of the objective function still occurs at point C; how
ever, the simplex method fails because the roof of our "shed" and objective function follow a down ward slope from point A to point Ff before going back up to point C.
Second, the objective function in our example depends on only two independent variables, so that the feasibility region is a simple polygon in the plane. Some students will undoubtedly point out
THE ALL NEW
MATHEMATICA TEACHER'S EDITION
RESEARCH
www.wolfram.com/teachersedition To purchase Mathematica Teacher's EiStion, cd) toR free 1WW01FRAM, send emerito [email protected], or go to store.wolfram.com. ? 2003 Wolfram Research, Ine Mathematica is o registered trademark of Wolfram Research, Inc. Mathematica is not associated with Mtrrhernatka Policy Research, Inc. or MathTech, Inc.
that we can get to the maximum point C by going from O to S and then to C and that the column in the tableau that is reduced first really should not matter. In the general linear-programming prob lems, the objective function depends on three or
more variables. The feasibility region for such a
problem is a "volume" in three or more dimensions. The corner points of the feasibility region may be connected with many other corner points, not just two, so we need to have a definite way to decide the corner point to move to next. The simplex method, in fact, not only chooses the direction of steepest ascent to an adjacent corner point but also rejects the phantom points that are intercepts of boundary "planes" with one of the variable axes but that are not actually corner points of the feasibility region.
One of the grade 9-12 expectations in Principles and Standards for School Mathematics (NCTM 2000, p. 308) is "use of geometric models to gain insight into... other areas of mathematics." The use of the model has certainly helped my students understand the concepts underlying linear pro gramming. In teaching situations in which a com
plete proof is not possible, the model provides stu dents with some measure of confidence in the
validity of the simplex algorithm as a way of mov
ing from one corner point to an adjacent one in such a way that they progress to the point where the maximum occurs. We can only speculate whether
George Dantzig, the original developer of the sim
plex method (O'Connor and Robertson 1996), used
geometrical intuition to guide his investigations.
BIBLIOGRAPHY Del Grande, John J., W. Bisset, and Edward Barbeau. Finite Mathematics. Markham, Ontario: Houghton Mifflin Canada, 1988.
Egsgard, John, Gary Flewelling, Craig Newell, and
Wendy Warburton. Finite Mathematics: A Search for Meaning. Toronto: Gage Educational Publishing Co., 1988.
Liai, Margaret L., Raymond N. Greenwell, and Charles D. Miller. Finite Mathematics. 6th ed. Don Mills, Ontario: Addison-Wesley Educational Publish ers, 1998.
National Council of Teachers of Mathematics (NCTM). Principles and Standards for School Mathematics. Reston,Va.: NCTM, 2000.
Noble, Ben, and James W. Daniel. Applied Linear Algebra. 2nd ed. Englewood Cliffs, N.J.: Prentice Hall, 1977.
O'Connor, J. J., and E. F. Robertson. "George Dantzig." www-gap.dcs.st-and.ac.uk/~history/Mathematicians
/Dantzig_George.html. World Wide Web, 1996. Stewart, James., Thomas M. K. Davidson, 0. Michael G. Hamilton, James Laxton, and M. Patricia Lenz. Finite Mathematics. Toronto: McGraw-Hill Ryerson Limited, 1988.
Mr
290 MATHEMATICS TEACHER
This content downloaded from 2.235.137.19 on Sat, 10 May 2014 12:30:42 PMAll use subject to JSTOR Terms and Conditions





























