SVEUILITE U ZAGREBU
RUDARSKO GEOLOKO NAFTNI FAKULTET
Diplomski studij rudarstva
IROSKOPI I INERCIJALNI
SUSTAVIseminarski rad
Mihovil Frani
R104 Zagreb, 2014.1. UvodPovijest inercijalnih sustava see od
poetka prolog stoljea. Prvi inercijalni instrumenti pojavili su se
jo davne 1900. godine. Bili su to iroskopi ugraeni u automobile i
prvi Sparryjevi (airborn) iroskopi. Korjene inercijalne navigacije
nalazimo 20-ih godina prolog stoljea u Njemakoj u razvoju sustava
navoenja balistikih projektila. Prvi inercijalni navigacijski
sustav (INS) za letjelice konstruirao je Charles S. Draper s
Massachusetts Institute of Technology 1950. godine. U istom
desetljeu u SAD-u poinje razvoj bespilotnih raketa i letjelica.
Jedan od takvih projekata bio je NAVAHO sa ciljem noenja atomskih
bojnih glava na udaljenostima veim od 5.500 milja te pogaanjem
cilja u krugu radijusa 500 m (Karabati 2005).Inercijalna geodezija,
zasniva se na ustanovljavanju momenta inercije, koji nastaje kao
rezultat sastavljenih gibanja. Inercijalne metode i inercijalni
sustavi slue za itav niz primjena u geodeziji, a posebno u
rudarskim mjerenjima te za vojne namjene (Marijanovi Kavanagh
2008).Vanost inercijalnih navigacijskih sustava u geodeziji je u
tome to nam oni pomau u pridruivanju prostorne komponente podacima
unutar neke baze podataka, te nam slui za navigaciju, odnosno,
usmjeravanje mjernih instrumenata tamo gdje geodetski instrumenti,
kao to je npr. GPS, ne funkcioniraju (u tunelima, pri prekidima
signala, i dr.). Osim to pomau pri navoenju, inercijalni
instrumenti su svojevrsna kontrola GPS-u, jer za kratke destinacije
daju visokotone podatke. Za razliku od te lokalne tonost koju
posjeduju inercijalni instrumenti, GPS ima globalnu tonost
(Karabati 2005).Klasina definicija kae da su inercijalni sustavi
oni sustavi u kojima vrijede Newton-ovi aksiomi. Pri tome je
potrebno objasniti pojmove inercije i Newton-ovih aksioma. Prvi
Newtonov zakon definiran je kao svojstvo tijela da zadri stanje
mirovanja ili da se jednoliko giba sve dok na njega ne djeluje neka
vanjska sila. Drugi Newton-ov zakon ide dalje i kae kako je ta
vanjska sila koja djeluje na tijelo proporcijonalna ubrzanju.
Konstanta proporcionalnosti je poznata kao masa tijela, koja je
zapravo numerika vrijednost inercije; to je masa tijela vea, to je
akceleracija ili ubrzanje manje. U treem aksiomu Newton kae da
svakoj sili akcije odgovara jednako vrijedna, ali suprotna po
smjeru, sila reakcije (Karabati 2005).2.iroteodolitiiroskop ili
zvrk je mehaniko osnosimetrino brzo torirajue tijelo relativno
velike mase ija je osnova postavljena u leajevima na jednom vrstom
ili vie pominih okvira. Svaki iroskop karakteriziraju sljedea
svojstva: iroskopna inercija, iroskopni moment i reakcije leajeva
precesija (promjena smjera osi rotirajuega tijela) i nutacija
(kratko periodiko osciliranje).Ako se iroskopu ogranii jedan
stupanj slobode i ureaj se objesi o tanku nit, to e nakon
stavljanja u pogon motora iroskopa, os njegove rotacije nastojati
zauzeti smjer prema polu i oko tog smjera e se polako njihati
(Marijanovi Kavanagh 2008).iroteodolit je instrument koji
pojednostavljuje zadatak odreivanja sjevera u rudnicima. Lagan je i
samoodravaju, te daje precizne rezultate u kratkom vremenu. Osnovna
jedinica sastoji se od preciznog iroskopa objeenog na kratku i
tanku metalnu vrpcu. iroskop sjedi na metalnom kuitu na vrhu
teodolita. Struja se dobavlja iz prijenosne baterije spojene na
ispravlja izmjeninog napona koji pokree iromotor (Hartman
1984).Nakon to iroskop utvrdi smjer sjevera prema polovima Zemlje i
orijentira horizontalni limb sva ostala mjerenja teodolitom se
nastavljaju kao da se mjeri na povrini zemlje. Nakon to je bila
odreena orijentacija (Marijanovi Kavanagh 2008).2.1. Mehaniki
iroskop
Mehaniki iroskop radi na principu zakona ouvanja kutne koliine
gibanja. Taj zakon omoguuje da prilikom rotiranja sistema u
odreenoj poziciji, taj e se sistem nastavit rotirati sve dok na
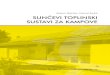
njega ne pone dijelovati vanjska sila.Konstrukcija mehanikog
iroskopa (slika 2-1) sastoji od:
1) Elektromotora kod kojih je masa rotora rasporeena po obodu
prstena. Teoretski vrh iroskopa bi se mogao vrtiti beskonano,
meutim zbog gubitka energije trenjem to je neizvedivo.2) Vrteeg
vrha koji nam omoguuje zakon ouvanja kutne koliine gibanja . Najee
se za vrtei vrh koriste diskovi zbog velikog kutnog momenta
potrebnog da se odupre kutnom pomicanju.3) Rotacijskih prstenova
koji se nalaze u vanjskom dijelu kuita. Ukoliko se rotira vanjsko
kuite, vrh e ostati u istoj orijentaciji tjerajui prstenove da se
rotiraju.4) Senzor je potreban da regulira kretanje prstenova, te
da otkrije koliko daleko je objekt rotirao od svoje referentne
pozicije. Novi modeli iroskopa koriste laser da utvrde razmak izmeu
prstenova, koji se potom pretvara u kutove. Slika 2-1 Konstrukcija
iroskopa (Britannica 2006)
2.2.RLG-iroskopi
Sredinom ezdesetih godina prolog stoljea konstruirani su
laserski iroskopi. Nazvani su Ring Laser Gyro ili skraeno
RLG-sustavi. Kod takvih iroskopa ne postoje mehaniki djelovi koji
rotiraju stoga RLG-iroskopi troe malo energije (struje) bez obzira
u kom poloaju se nalaze. Stoga se takvi ureaji termiki i
dimenzionalno vrlo stabilni, te se odlikuju odlinom dugotrajnom
stabilnou. (Marijanovi Kavanagh 2008).RLG-iroskop sastoji se od
staklene cijevi oblika trokuta (slika 2-2) u kojoj su postavljena
tri zrcala tako da tvore optiki rezonator. Cijev je pod malim
tlakom i ispunjena je mjeavinom helija i neona. U cijevi su ugraene
tri elektrode od toga jedna katoda i dvje anode koje se napajaju
visokim naponom od oko 1kV. Na taj nain se u cijevi generira
monokromatska koherentna svijetlost kojoj je valna duljina odreena
medijem. U cijevi su tako nastala dva lasera kojima se svjetlost
kree u dva suprotna smjera. Konstruktivno je uinjeno da je jedno od
zrcala polupropusno tako da zrake svjetla iz oba smjera jednim
djelom prolaze kroz njega. Iza polupropusnog zrcala su postavljena
dva detektora koji registriraju frekvenciju lasera. Miruje li
sustav, tada se na izlazu iz detektora registrira ista frekvencija
iz oba lasera (Marijanovi Kavanagh 2008).
Slika 2-2 Konstrukcija RLG-iroskopa2.3.FOG-iroskopOsnovna
razlika izmeu RLG i FOG sustava je ta to se kod RLG sustava
primjenjuje optiki rezonator, kod kojeg se odreuje promjena
frekvencije, dok je FOG-sustav interferometrijski. Kod FOG-sustava
(slika 2-3) je izvor monokromatske koherentne svjetlosti tj. lasera
postavljen izvan sustava. Svjetlost iz lasera se na polupropusnom
zrcalu grana i dovodi istovremeno na poetak i na kraj svjetlovoda
koji je namotan kao zavojnica. Zavojnica ima velik broj zavoja, pa
se time znatno produljuje put zrakama svjetla kroz svjetlovod. Kako
svjetlo prevaljuje isti put u oba smjera, to se na detektoru kod
mirovanja sustava pojavljuje svjetlost s odreenim razmakom faza
primljenih signala.
Unapreenje ovog rjeenja je postignuto dodatkom modulatora faze,
pri emu se svjetlost modulira u modulatoru, a izlazni signal
detektira u ovisnosti o fazi (Marijanovi Kavanagh 2008).Prednosti
FOG sustava nad RLG sustavom su: manja teina, manja veliina,
smanjena potrpnja elektrine energije, dui ivotni vijek ureaja i ono
najbitnije, nia cijena.
Slika 2-3 Princip FOG-iroskopa s faznim modulatorom3.iro-sustavi
za navigaciju INS
Svaki se inercijalni navigacijski sustav sastoji od senzora koje
nazivamo inercijalnim mjernim ureajima (IMU - Inertial Measurement
Units, slika 3-1). Gibanja koja promatramo u navigaciji jesu
translacijska i rotacijska pa prema tome koristimo dvije vrste
inercijalnih mjernih ureaja, akcelerometre i iroskope. Ureaje
integriramo na platforme, koji zajedno sa ostalim ureajima
(mikroprocesor) potrebnim za izraunavanjem koordinatnih razlika
izmeu dvije toke, tvore inercijalne navigacijske sustave.
Akcelerometri (najmanje tri, Ax,Ay,Az) prvenstveno slue za mjerenje
linearnih akceleracija, pomou kojih kasnije, raunskim putem,
dolazimo do prijeenog puta. iroskopi (x,y,z) slue za mjerenje
kutnih pomaka, pomou kojih stabliziramo sustav (koordinatne osi)
bilo mehaniki ili analitiki. Za mjerenje kutnih pomaka mogue je
koristiti i kutne akcelerometre, ali su se iroskopi pokazali boljim
izborom za potrebe navigacije (Karabati 2005).Konstrukcija samih
inercijalnih navigacijskih ureaja mogua je na dva naina, pomou
stabiliziranih ili privrenih sustava (strap-down systems). Ovisno o
navigacijskom okviru, sustave je mogue stabilizirati u odnosu na
inercijalni prostor ili na lokalno tako da se platforma uvijek
odrava horizontalno u prostoru (Karabati 2005).Stabilizirani
inercijalni sustavi su dugo vremena dominirali u podruju
inercijalne navigacije, najvie zbog konstrukcije samih senzora koji
su radili na mehanikom principu (mehaniki iroskopi). Razvojem
raunala i analitikih senzora privreni sustavi postiu sve bolje
rezultate, te se u novije vrijeme poinju sve vie koristiti. Iako se
platforme donekle same stabiliziraju na osnovu inercije stabilnog
elementa u prstenovima, servo motorima se dodatno postie
stabilizacija platformi (Karabati 2005).Kod privrenih sustava,
akcelerometri i iroskopi su nalaze na platformi koja je privrena za
vozilo te slijede sva gibanja vozila. Najee se izmeu vozila i
platformi postavljaju posebni nosai radi ublaivanja vibracija i
udaraca koje stvara vozilo. U ove sustave ugrauju se optiki
iroskopi koji prate kutna gibanja vozila te se mjerenja
akcelerometara analitiki transformiraju iz okvira sustava u
navigacijski okvir (Karabati 2005). Slika 3-1 Osnovne komponente
inercijalne mjerne jedinice (Kranjec 2006)
Osnovni mjerni instrument za mjerenje ubrzanja, svakog
inercijalnog sustava je akcelerometar. Akcelerometri su najee
minijaturna ili subminijatruna njihala, kod kojih promjena poloaja
akcelerometra u odreenom smjeru pomie njihalo, iji se pomak od
inercijalnog poloaja registrira kapacitivnim, induktivnim ili
poluvodikim senzorom. Suvremeni akcelerometri uglavnom nemaju
pokretnih dijelova (solid state), ve se kao korisni signal iz
akcelerometra uzima struja potrebna da se uz pomo povratne veze
poniti sila koja djeluje na njihalo (Marijanovi Kavanagh
2008).Postoje nekoliko vrsta akcelerometara konstruktivno razliitih
izvedbi, ali po svojim osobinama mogu se podijeliti u dvije
grupe:
1) Linijski akceletometri registriraju pravolinijske pomake.
Osjetljiva masa smjetena je u tekuini, a sve zajedno u cilindru
koji brzo rotira. Masa je samocentrirajua, a opruge mogu biti
mehanike ili elektronske.
2) Kutni akcelerometri koriste svojstva fizikog klatna. Unutar
cilindra s odgovarajuom tekuinom smjetena je osjetljiva masa u
obliku plovka. Usprkos izuzetno osjetljivim i stabilnim senzorima
tonost odreivanja pozicije INS-om je ograniena unutarnjim i
vanjskim utjecajima smetnji, koji se zajedno manifestiraju kao
odstupanje platforme od zadanog koordinatnog sustava, nakon
odreenog vremena. Razmatrajui odstupanje u svom ukupnom iznosu,
odstupanja INS-a moemo svrstati u tri grupe:
1) Ukupna odstupanja iroskopa (gyro drift rate).
2) Ukupna odstupanja u odreivanju poloaja (odstupanje u
odreivanju ubrzanja zbog akcelerometra, nedovoljnog poznavanja
gravitacijskig polja i pogreaka u orijentaciji akcelerometra).
3) Odstupanje orijentacije osi navigacijskig sustava (odstupanje
zbog navoenja platforme i promjene zbog rotacije u inercijalnom
prostoru) (Marijanovi Kavanagh 2008).4.Sile koje djeluju na
INS4.1.GravitacijaGravitacijska sila djeluje meu svim tijelima,
alim ju je esto teko opaziti zbog realtivno slabog inteziteta. Iz
injenice da akceleracija slobodnog pada ne ovisi o masi tijela koje
pada zakljuujemo da je gravitacijska proporcionalna masi tijela. Po
zakonu akcije i reakcije, sila kojom jedno tijelo privlaci drugo,
jednaka je po iznosu sili kojom drugo tijelo privlai prvo, tj.
gravitacijska sila mora biti proporcionalna umnoku amsa obaju
tijela. Gravitacijska sila ovisi i udaljenosti meu tijelima i
obrnuto je proporcionalna kvadratu udaljenosti (FER 2013).
Pri tome je G univerzalna konstanta (6,672x10-11 m3s-2kg-1), a
e12 jedinini vektor u smjeru m1 m2. Prema tome gravitacijsko
ubrzanje mase m2 u odnosu na masu m1 izraeno vektorom g moemo
napisati izrazom:
Osim normalnog ubrzanja sile tee, koje se mijenja s promjenom
visine i geografske irine, na INS u inercijalnom prostoru djeluju i
sile koje nastaju zbog rotacije Zemlje, ali koje se mogu dovoljno
tono odrediti. To su centrifugalna sila i Coriolisovo ubrzanje
(Marijanovi Kavanagh 2008).4.2.Centrifugalna silaCentrifugalna sila
(slika 4-2) tj. njen modul Fc djeluje uvijek po polumjeru r
pripadne paralele, pa moemo napisati:
To znai da je modul centrifugalne sile Fc jednak umnoku mase m,
njegove udaljenosti r od osi rotacije i kvadtrata kutne brzine
rotacije Zemlje . Kako je na polovima Zemlje polumjer rotacije ,
centrifugalna sila ne djeluje. Najjae djelovanje centrifugalne sile
je stoga na ekvatoru Zemlje gdje je polumjer rotacije najvei (oko
6370 km), a kako je centrifugalna sila usmjerena suprotno sili
privlaenja, to je na ekvatoru sila privlaenja najmanja. Sva mjesta
udaljena od pola imaju stoga silu tee manju od sile privlaenja na
polu. To su tzv. Normalne promjene sile tee, koje se zbog
pojednostavljenja raunaju na referentnom elipsoidu (Marijanovi
Kavanagh 2008).
Slika 4-2 Centrifugalna sila
4.3.Coriolisovo ubrzanje
Corioliolisovo ubrzanje je dopunsko ubrzanje koje nastaje kao
posljedica uzajamnog djelovanja prijenosnog i relativnog
gibanja:
Coriolisovo se ubrzanje pojavljuje kao posljedica promjene
relativne i prijenosne brzine i to:
1) Uslijed relativnog gibanja materijalne toke, koja se giba u
odnosu na neinercijski kordinatni sustav, mijenja se prijenosna
brzina toke, jer se toka pomie na mjesto u neinercijskom sustavu
gdje se prijenosne brzine razlikuju.
2) Uslijed rotacijonog prijenosnog gibanja dodatno se mijenja
pravac relativne brzine u odnosu na inercijski koordinatni sustav
(FER 2013)5.Potekoe u primjeni INS-a
Kako INS-i daju diskretnu vrijednost pozicija to je iz ve
izraunatih i iz trenutne pozicije vozila mogue sloemnim matematikim
algoritmima ekstrapolirati i predvidjeti novu poziciju vozila, koja
e tek uslijediti. No, uz prije navedene utjecaje koje registriramo
INS-om, na mjerni sustav djeluju jo i tujecaji koje je pojedinano
nemogue egzaktno odrediti, pa se uz primjenu odgovarajuih
matematikih modela ova odstupanja uklanjaju u ukupnom iznosu.
Tonost INS-a jo uvijek ograniavaju odstupanja izazvana nestabilnou
iroskopa tzv. gyro drift rate, pogreke skale i mjerila
akcelerometara, odstupanje zbog neokomitosti osi akcelerometara i
pogreaka orijentacije akselerometara u odnosu na iroskop. Kako se
veina ovih utjecaja s vremenom sumira, ta odstupanja kroz dui
vremenski period postaje nedopustivo velika. Stoga je izraunatu
trenutnu poziciju vozila potrebno u pravilnim vremenskim
intervalima korigirati egzaktnim podatcima povremenih mjerenja
nekom drugom geodetskom metodom kao npr. GNSS (Marijanovi Kavanagh
2008).
S obzirom na potekoe kod pozicioniranja koristei suvremene GNSS
metode u uvijetima loeg prijema i potpunog izostanka signala npr.
ispod povrine Zemlje ili vode, dakle u rudarstvu, tunelogradnji, te
za vojne namjene, uoljiv je znaajan potencijal INS-a (Marijanovi
Kavanagh 2008).6.LiteraturaMarijanovi Kavanagh R., 2008. Rudarska
mjerenja. Zagreb: Rudarsko-geoloko-naftni faklutet.Karabati A.,
2005. Inercijalni sustavi.Hartman L. H., 1984. SME Mining
Engineering Handbook 2. Izd.Encyclopedia Britannica URL:
http://kids.britannica.com/elementary/art-89763/A-mechanical-gyroscope-consists-of-a-wheel-set-in-a?&articleTypeId=38Kranjec,
M., Pavasovi, M., 2006. Primjena inercijalnih navigacijskih
sustava. Zagreb: Ekscentar, str 54-57
FER, 2013. Energijske pretvorbe, princip ouvanja koliine gibanja
za neinercijski kontrolirani volumen. Interna skripta.
FER, 2013. Gravitacija, inercijski sustavi. Interna skripta.