12 Flächen- und Volumenintegrale
12.1 Integration über ebene Mengen
12.1.1 Erweiterung des Flächeninhaltsbegriffes
In einigen Spezialfällen haben wir ebenen Mengen (d.h. Teilmengen vonR2) bereits einenFlächeninhalt zugeordnet (siehe Abschnitt9.1). Nun wollen wir für eine recht umfangreicheKlasse von ebenen Mengen den Begriff des Flächeninhalts definieren.
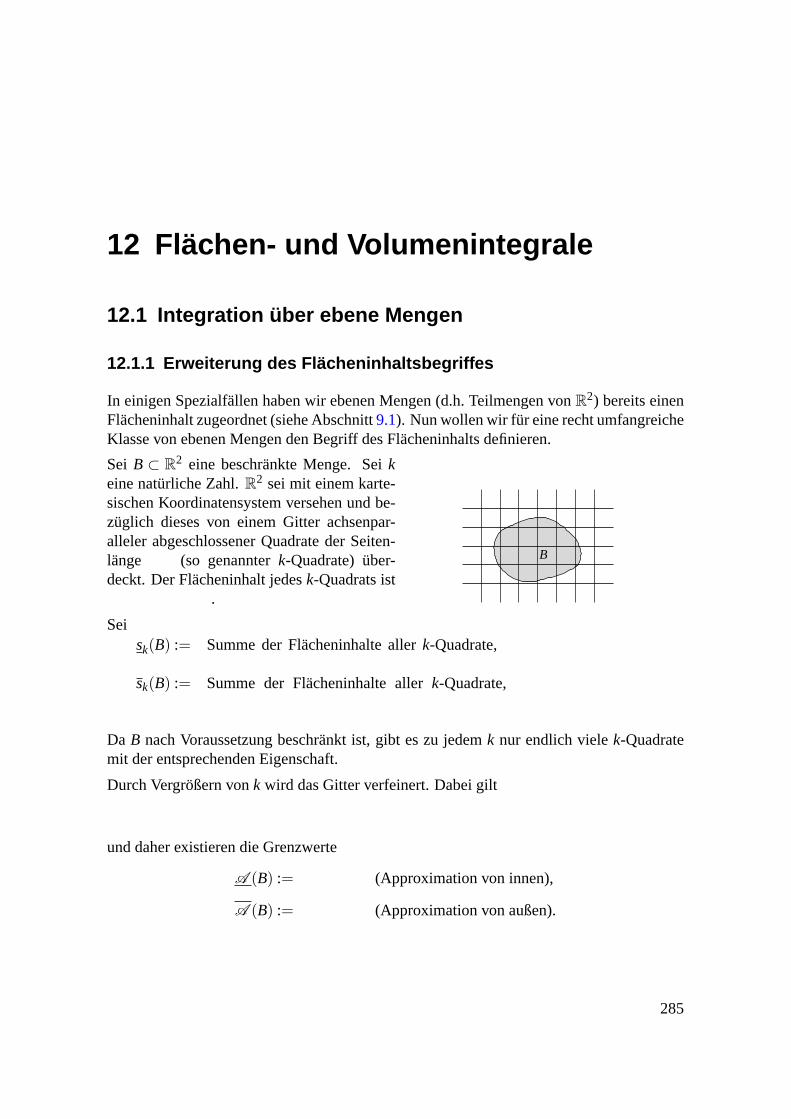
Sei B ⊂ R2 eine beschränkte Menge. Seikeine natürliche Zahl.R2 sei mit einem karte-sischen Koordinatensystem versehen und be-züglich dieses von einem Gitter achsenpar-alleler abgeschlossener Quadrate der Seiten-länge 2−k (so genannterk-Quadrate) über-deckt. Der Flächeninhalt jedesk-Quadrats ist2−k ·2−k = 2−2k.
B
Seisk(B) := Summe der Flächeninhalte allerk-Quadrate,die ganz inB enthalten
sind,sk(B) := Summe der Flächeninhalte allerk-Quadrate,die mindestens einen
Punkt vonB enthalten.
Da B nach Voraussetzung beschränkt ist, gibt es zu jedemk nur endlich vielek-Quadratemit der entsprechenden Eigenschaft.
Durch Vergrößern vonk wird das Gitter verfeinert. Dabei gilt
sk(B)≤ sk+1(B)≤sk+1(B)≤ sk(B) ,
und daher existieren die Grenzwerte
A (B) := limk→∞
sk(B) (Approximation von innen),
A (B) := limk→∞
sk(B) (Approximation von außen).
285
12 Flächen- und Volumenintegrale
Definition 12.1.1.Die MengeB⊂R2 heißtRiemann-meßbar,wennsie beschränkt istundA (B) = ¯A (B) gilt. Dieser gemeinsame Wert heißt dannFlächeninhalt A (B) der MengeB. (A für “area”, lat.: Fläche.)
Ist N⊂ R2 Riemann-meßbar und giltA (N) = 0, so heißtN Nullmengein R2.
Satz 12.1.2.Für beschränkte Teilmengen B und N vonR2 gilt:
(i) B ist genau dann Riemann-meßbar, wenn derRand von B eine Nullmenge inR2 ist.
(ii) Ist B Riemann-meßbar und N Nullmenge inR2, so gilt
A (B) = A (B∪N) = A (B\N) .
Satz 12.1.3.Jede ausendlich vielen, stetig differenzierbaren Kurvenstückenund eventuellendlich vielen, weiteren Punkten bestehende Teilmenge vonR2 ist Nullmenge inR2.
Aus diesen Sätzen folgt:
Folgerung 12.1.4.Jede beschränkte Teilmenge B vonR2, deren Rand aus endlich vielen,stetig differenzierbaren Kurvenstücken und eventuell endlich vielen weiteren Punkten be-steht, istRiemann-meßbar, besitzt also einen FlächeninhaltA (B).
Folgerung 12.1.5.Das Hinzufügen oder Entfernen einer Nullmenge inR2 läßt den Flä-cheninhalt einer Riemann-meßbaren Menge unverändert.
Beispiel 12.1.6.Es seiB ein abgeschlossenes Rechteck in derEbene mit den Seitenlängena> 0 undb> 0. N1 sei die ausden vier Seitenlinien bestehende Menge undN2 eine Diagonale.Dann sindN1 undN2 Nullmengen inR2, und es gilt
A (B\N1) = A (B\N2) = A (B) = ab. a
bN2
Beispiel 12.1.7.Es seiB wie in Beispiel12.1.6und
M := {(x,y) ∈ B: x undy rationale Zahlen} .
Dann giltA (M) = 0 (denn jedesk-Quadrat enthält auch Punkte mit mindestens einer irra-tionalen Koordinate) und ¯A (M) = ab> 0. Also istM nicht Riemann-meßbar.
12.1.2 Der Begriff des Flächenintegrals
Es soll das Integral einer Funktion über eine beschränkte ebene Menge definiert werden.
286

12.1 Integration über ebene Mengen
Wir erinnern an die Definition des Integralsb∫a
f (x)dx mittels Riemann-Summen der Form
S( f ) :=m
∑i=1
f (ξi) ·4xi ,
die zu einer ZerlegungZ = {a = x0,x1, . . . ,xm = b} des Intervalls[a,b] gehören. Hierbei ist4xi := xi−xi−1 die Länge des Teilintervalls[xi−1,xi ] undξi ∈ [xi−1,xi ].
Nun seiB⊂ R2 eine beschränkte Menge undf : B→ R eine Funktion.
Mittels glatten Kurvenstücken sei eine Zerle-gungZ von B in TeilmengenB1, . . . ,Bm vor-genommen. Die MengeB sei so beschaffen,daßjedesBi Riemann-meßbar ist, und es sei4Bi := A (Bi) der Flächeninhalt vonBi .Wei-ter sei(ξi ,ηi) ∈ Bi beliebig gewählt.
B
Bi
Dann heißt
S( f ,Z) :=m
∑i=1
f (ξi ,ηi) ·4Bi (12.1.1)
Riemann-Summevon f bezüglich der ZerlegungZ.
Es seiδ (Z) der maximale Durchmesser (d.h. das Supremum der Abstände zweier Punktedieser Menge) der zuZ gehörigen MengenB1, . . . ,Bm. δ (Z) ist ein Maß für die “Feinheit”der ZerlegungZ.
Statt einer ZerlegungZ betrachten wir nun eine Folge von “immer feineren” ZerlegungenZn vonB in MengenB(n)
1 , . . . ,B(n)mn . Dabei soll “immer feiner” bedeuten, daßlim
n→∞δ (Zn) = 0
gilt. Wenn nun für jede solche Folge(Zn) und jede Wahl der Punkte(ξ(n)i ,η
(n)i ) ∈ B(n)
i diezugehörige Folge der Riemann-Summen stets konvergiert, so hängt deren Grenzwert nurvon f undB ab und heißtFlächenintegralvon f überB, in Zeichen∫∫
B
f db oder∫∫B
f (x,y)db(x,y) oder∫∫B
f (x,y)d(x,y) .
Das db deutet dabei darauf hin, daß wir über einen Bereich integrieren.
In Kurzform kann man die Definition so zusammenfassen:∫∫B
f db := limδ (Zn)→0
mn
∑i=1
f (ξ(n)i ,η
(n)i ) ·4B(n)
i .
Satz 12.1.8.Ist B⊂ R2 Riemann-meßbar und f: B→ R beschränkt und stetig, so existiertdas Flächenintegral
∫∫B
f db.
287
12 Flächen- und Volumenintegrale
Bemerkung12.1.9. Aus (12.1.1) mit f = 1 folgt S( f ,Z) =m∑
i=14Bi = A (B). Alle Riemann-
Summen haben denselben Wert und daher ist∫∫B
db = A (B) der Flächeninhalt vonB. (12.1.2)
12.1.3 Berechnung von Flächenintegralen
Wir beginnen mit zwei allgemeinen Rechenregeln.
Satz 12.1.10.Ist B⊂ R2 Riemann-meßbar, N⊂ R2 Nullmenge inR2 und f : B∪N→ Rbeschränkt und stetig, so gilt (vgl. Satz12.1.2)∫∫
B
f db =∫∫
B∪N
f db=∫∫
B\N
f db. (12.1.3)
Satz 12.1.11.Seien B1,B2 ⊂ R2 Riemann-meßbareMengen, die höchstens eine Nullmenge gemeinsam ha-ben. Weiter sei f: B1∪B2→ R beschränkt und stetig.Dann gilt∫∫
B1∪B2
f db =∫∫B1
db+∫∫B2
db. (12.1.4) B1
B2
Wir definieren nun Klassen von ebenen Mengen, für die das Flächenintegral leicht zu be-rechnen ist.
Definition 12.1.12.
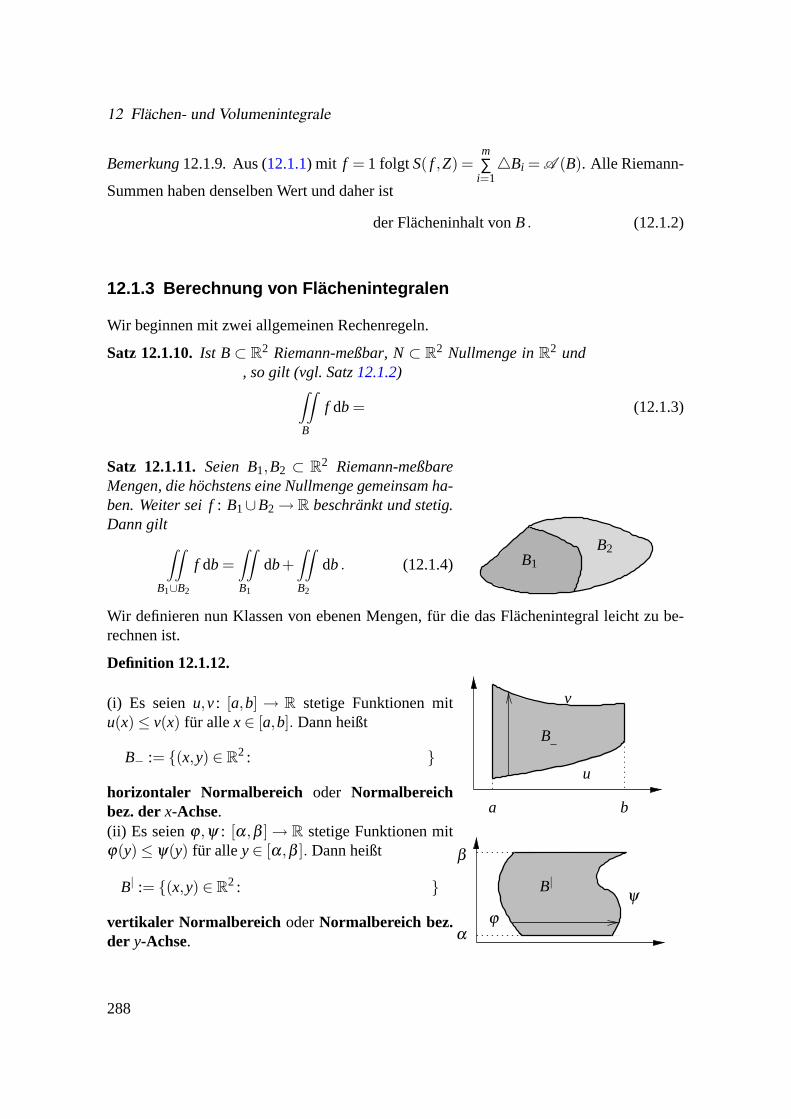
(i) Es seienu,v: [a,b] → R stetige Funktionen mitu(x)≤ v(x) für allex∈ [a,b]. Dann heißt
B− := {(x,y) ∈ R2 : a≤ x≤ b, u(x)≤ y≤ v(x)}
horizontaler Normalbereich oder Normalbereichbez. derx-Achse.
v
u
B_
ba
(ii) Es seienϕ,ψ : [α,β ]→ R stetige Funktionen mitϕ(y)≤ ψ(y) für alley∈ [α,β ]. Dann heißt
B| := {(x,y) ∈ R2 : α ≤ y≤ β , ϕ(y)≤ x≤ ψ(y)}
vertikaler Normalbereich oderNormalbereich bez.der y-Achse.
β
α
B|
ϕ
ψ
288

12.1 Integration über ebene Mengen
Satz 12.1.13.(i) Ist B− ⊂ R2 ein Normalbereich bezüglich der x-Achse und f: B− → Reine stetige Funktion, so gilt∫∫
B−
f db =∫∫B−
f (x,y)d(x,y) =∫ b
x=a
[∫ v(x)
y=u(x)f (x,y)dy
]dx . (12.1.5)
(ii) Ist B| ⊂R2 ein Normalbereich bezüglich der y-Achse und f: B|→R eine stetige Funk-tion, so gilt∫∫
B|
f db =∫∫B|
f (x,y)d(x,y) =∫ β
y=α
[∫ψ(y)
x=ϕ(y)f (x,y)dx
]dy. (12.1.6)
Durch (12.1.5) wird das Flächenintegral auf ein zweifaches Integral zurückgeführt. Letzte-res berechnet man“von innen nach außen”: Man integriert zuerst übery bei “festgehalte-nem”x, danach überx.
Entsprechendes gilt für (12.1.6).
Beispiel 12.1.14.Die Graphen der Funktionen
f1(x) =√
x+3, f2(x) = 0, und f3(x) = 2√
x
mitD( f1) = D( f2)[−3,∞[ , D( f3) = [0,∞[
beranden einen beschränkten BereichB derx,y-Ebene. Gesucht ist der FlächeninhaltA (B).
Lösung: Im Bild ist der BereichB darge-stellt. Der Schnittpunkt von graph( f1) undgraph( f2) ergibt sich aus
√x+3 = 2
√x zu
(1,2).Zur Berechnung vonA (B) =
∫∫B
db sind zwei
Wege möglich. 1−3
y =√
x+3
y = 2√
xB1
B2
x
y
1. Weg:B “von derx-Achse her” betrachten. Nach Satz12.1.11gilt
A (B) =∫∫B1
db+∫∫B2
db,
wobeiB1 undB2 Normalbereiche bezüglich derx-Achse sind. Daher gilt∫∫B1
db =∫ 0
x=−3
[∫ √x+3
y=0dy
]dx =
∫ 0
x=−3y∣∣y=√
x+3y=0 dx
=∫ 0
x=−3
√x+3 dx =
23
(x+3)32
∣∣∣∣x=0
x=−3= 2√
3
289

12 Flächen- und Volumenintegrale
und ∫∫B2
db =∫ 1
x=0
[∫ √x+3
y=2√
xdy
]dx =
∫ 1
x=0(√
x+3−2√
x)dx = 4−2√
3.
Somit istA (B) = 4.
2. Weg:B “von dery-Achse her” betrachten.Dann istB selbst Normalbereich. Wegen
y =√
x+3⇐⇒ x = y2−3, y≥ 0
y = 2√
x⇐⇒ x =14
y2, y≥ 0,
folgt 1−3
x = y2−3
x = 14y2
x
y
A (B) =∫∫B
db =∫ 2
y=0
[∫ 14y2
x=y2−3dx
]dy =
∫ 2
y=0[14
y2−y2 +3]dy = [−14
y3 +3y]∣∣y=2y=0 = 4.
Der zweite Weg ist hier kürzer und daher hier vorzuziehen.
Wir betrachten noch einen Spezialfall von Satz12.1.13. Ein Rechteck
B = {(x,y) ∈ R2 : a≤ x≤ b, α ≤ y≤ β}
ist sowohl Normalbereich bezüglich derx-Achse als auch Normalbereich bezüglich dery-Achse. Für jede stetige Funktionf : B→ R gilt daher dieVertauschungsformel∫ b
x=a
[∫β
y=α
f (x,y)dy
]dx =
∫∫B
f dB =∫∫B
f (x,y)d(x,y) =∫
β
y=α
[∫ b
x=af (x,y)dx
]dy.
(12.1.7)
12.1.4 Anwendungen
Eine Riemann-meßbare MengeB⊂ R2 (Platte) sei mit Masse der FlächendichteρF belegt.
a) Für dieMassem vonB gilt
m=∫∫B
ρF db =∫∫B
ρF(x,y)d(x,y) . (12.1.8)
b) Statische MomentevonB :Denkt man sich die Masse4mi des TeilbereichsBi im Punkt(ξi ,ηi) konzentriert, dann ist
4mi ·ηi (Masse mal Abstand von derx-Achse)
290
12.1 Integration über ebene Mengen
das statische Moment dieser Punktmasse bez. derx-Achse. Durch Summieren und Verfei-nern der Zerlegung erhält man für den gesamten BereichB :
Mx :=∫∫B
y·ρF(x,y)d(x,y) statisches Moment bez. derx-Achse,
My :=∫∫B
x ·ρF(x,y)d(x,y) statisches Moment bez. dery-Achse.(12.1.9)
c) Der Schwerpunkt (oder Massenmittelpunkt) von B ist definiert als derjenige PunktS= (xs,ys), in dem die Gesamtmassem dieselben statischen Momente hat wie der BereichB. Ausmxs = My undmys = Mx folgt mit (12.1.9):
S= (xs,ys) mit xs =1m
∫∫B
x ·ρF(x,y)d(x,y) , ys =1m
∫∫B
y·ρF(x,y)d(x,y) . (12.1.10)
Ist ρF(x,y) = ρ0 (konstant) für alle(x,y) ∈ B, dann istm = ρ0∫∫B
dB = ρ0A (B). Mit
(12.1.10) ergibt sich dergeometrische SchwerpunktSvonB :
S= (xs, ys) mit xs =1
A (B)
∫∫B
xd(x,y) , ys =1
A (B)
∫∫B
yd(x,y) . (12.1.11)
d) TrägheitsmomentevonB :
Ix =∫∫B
y2 ·ρF(x,y)d(x,y) Trägheitsmoment bezüglich derx-Achse,
Iy =∫∫B
x2 ·ρF(x,y)d(x,y) Trägheitsmoment bezüglich dery-Achse,
I0 =∫∫B
(x2 +y2) ·ρF(x,y)d(x,y) polares Trägheitsmoment,
Ixy =−∫∫B
xy·ρF(x,y)d(x,y) Deviationsträgheitsmoment.
Im FalleρF(x,y) = 1 für alle(x,y) ∈ B heißenIx, , Iy, I0 undIxy Flächenmomente.
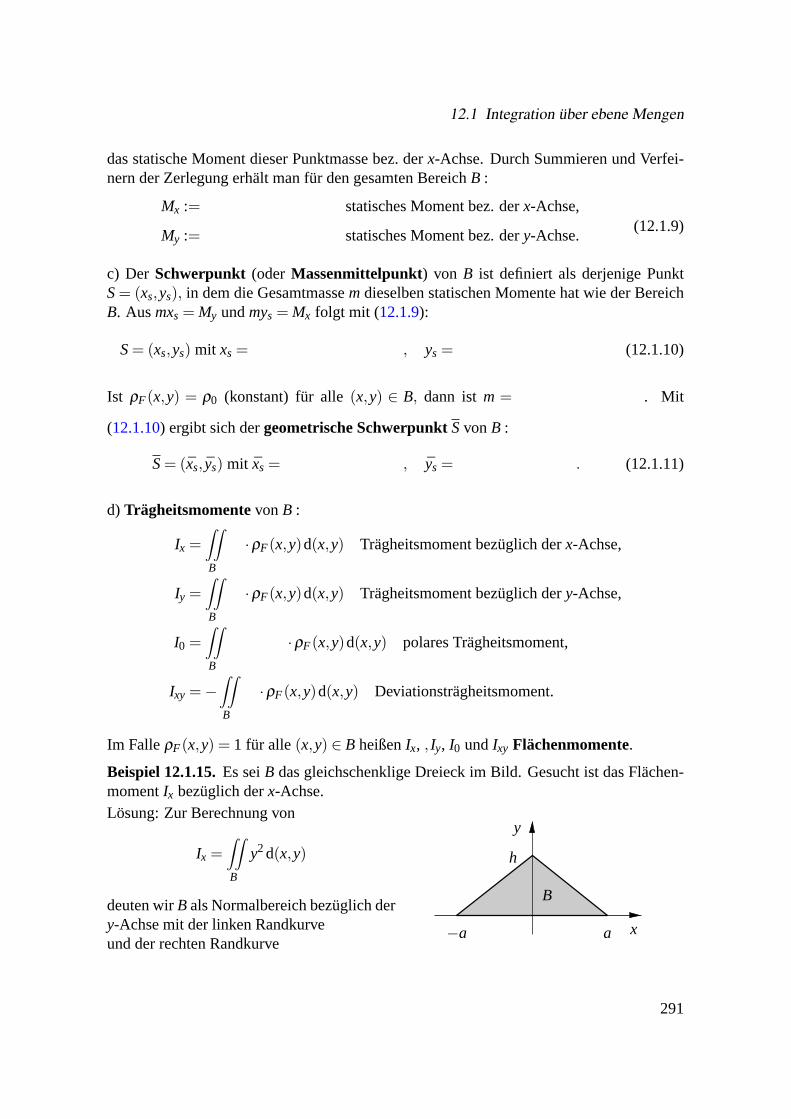
Beispiel 12.1.15.Es seiB das gleichschenklige Dreieck im Bild. Gesucht ist das Flächen-momentIx bezüglich derx-Achse.Lösung: Zur Berechnung von
Ix =∫∫B
y2d(x,y)
deuten wirB als Normalbereich bezüglich dery-Achse mit der linken Randkurvex = a
hy−aund der rechten Randkurvex =−a
hy+a.x
y
−a a
h
B
291
12 Flächen- und Volumenintegrale
Hiermit gilt
Ix =∫∫B
y2d(x,y) =∫ h
y=0
[∫ − ahy+a
x= ahy−a
y2dx
]dy =
∫ h
y=0y2 ·2
(−a
hy+a
)dy =
ah3
6.
12.2 Integration über räumliche Mengen
12.2.1 Der Begriff des Volumens
Analog zu14.1.1definieren wir die Parameterdarstellung eines FlächenstückesF ⊂ R3 alsdas Bild einer stetigen Abbildungf : B⊂ R2→ R3.
Die in 12.1.1für beschränkte ebene Mengen durchgeführten Überlegungen lassen sich nunsinngemäß auf beschränkte räumliche Mengen („Körper“) übertragen. Die folgende Tabelledeutet dies an.
gegebene Menge Approx. durch führt zu speziellR2 B⊂ R2 beschränkt Quadrate Riemann-Meßbarkeit B Nullmenge inR2
Flächeninh.A (B) A (B) = 0R3 K ⊂ R3 beschränkt Würfel Riemann-Meßbarkeit K Nullmenge inR3
Volumen V (K) V (K) = 0
Es gelten zu den Sätzen12.1.2, 12.1.3analoge Aussagen. Wir formulieren nur deren prak-tische Konsequenzen:
• Jede beschränkte TeilmengeK von R3, deren Rand eine Nullmenge inR3 ist [alsoz.B. nur aus je endlich vielen Flächenstücken, Kurvenstücken oder Punkten besteht]ist Riemann-meßbar, besitzt also ein VolumenV (K).
• Das Hinzufügen oder Entfernen einer Nullmenge inR3 läßt das Volumen einer Riemann-meßbaren Teilmenge vonR3 unverändert.
Beispiel 12.2.1.Es seiK ein abgeschlossener Quader mit den Kantenlängena,b,c. DerRand vonK besteht aus den 6 Seitenflächen, den 12 Kanten und den 8 Ecken. BezeichnetN den gesamten Rand vonK (oder Teile davon), so istN eine Nullmenge inR3, K istRiemann-meßbar,und es gilt
V (K \N) = V (K) = abc.
Bemerkung12.2.2. Jede Seitenfläche vonK ist Nullmenge inR3, aber nicht Nullmenge inR2.
292
12.2 Integration über räumliche Mengen
12.2.2 Der Begriff des Raumintegrals
Es seienK ⊂R3 eine beschränkte Menge undf : K→R eine Funktion. Es soll das Integralvon f überK definiert werden. Mittels Flächenstücken seiK in TeilmengenK1, . . . ,Km zer-legt. JedesKi sei Riemann-meßbar mit dem Volumen4Ki := V (Ki).Weiter sei(ξi ,ηi ,ζi)∈Ki beliebig gewählt. Dann heißt
S( f ,Z) :=m
∑i=1
f (ξi ,ηi ,ζi) ·4Ki (12.2.1)
Riemann-Summevon f .
Statt einer Zerlegung vonK betrachten wir nun eine Folge von Zerlegungen, die “immerfeiner” werden (vgl.12.1.2), sowie die zugehörige Folge der Riemann-Summen. Wenndiese stets konvergiert, hängt der Grenzwert nur vonf undK ab und heißtRaumintegralvon f überK, in Zeichen∫∫∫
K
f dv oder∫∫∫
K
f (x,y,z)dv(x,y,z) oder∫∫∫
K
f (x,y,z)d(x,y,z) .
Hier bezeichnet dv, daß es sich um ein Volumenintegral handelt.
Satz 12.2.3.Ist K⊂R3 Riemann-meßbar und f: K→R beschränkt und stetig, so existiertdas Raumintegral
∫∫∫K
f dv.
12.2.3 Berechnung von Raumintegralen
Die den Sätzen12.1.10, 12.1.11entsprechenden Sätze sind:
Satz 12.2.4.Ist K ⊂ R3 Riemann-meßbar, N⊂ R3 Nullmenge inR3 und f : K ∪N→ Rbeschränkt und stetig, so gilt∫∫∫
K
f dv =∫∫∫K∪N
f dv =∫∫∫K\N
f dv.
Satz 12.2.5.Seien K1,K2⊂R3 Riemann-meßbare Mengen, die höchstens eineR3-Nullmengegemeinsam haben. Weiter sei f: K1∪K2→ R beschränkt und stetig. Dann gilt∫∫∫
K1∪K2
f dv =∫∫∫K1
f dv+∫∫∫K2
f dv.
293
12 Flächen- und Volumenintegrale
Grundlage für die Berechnung von vielen Raumintegralen ist der folgende Satz.
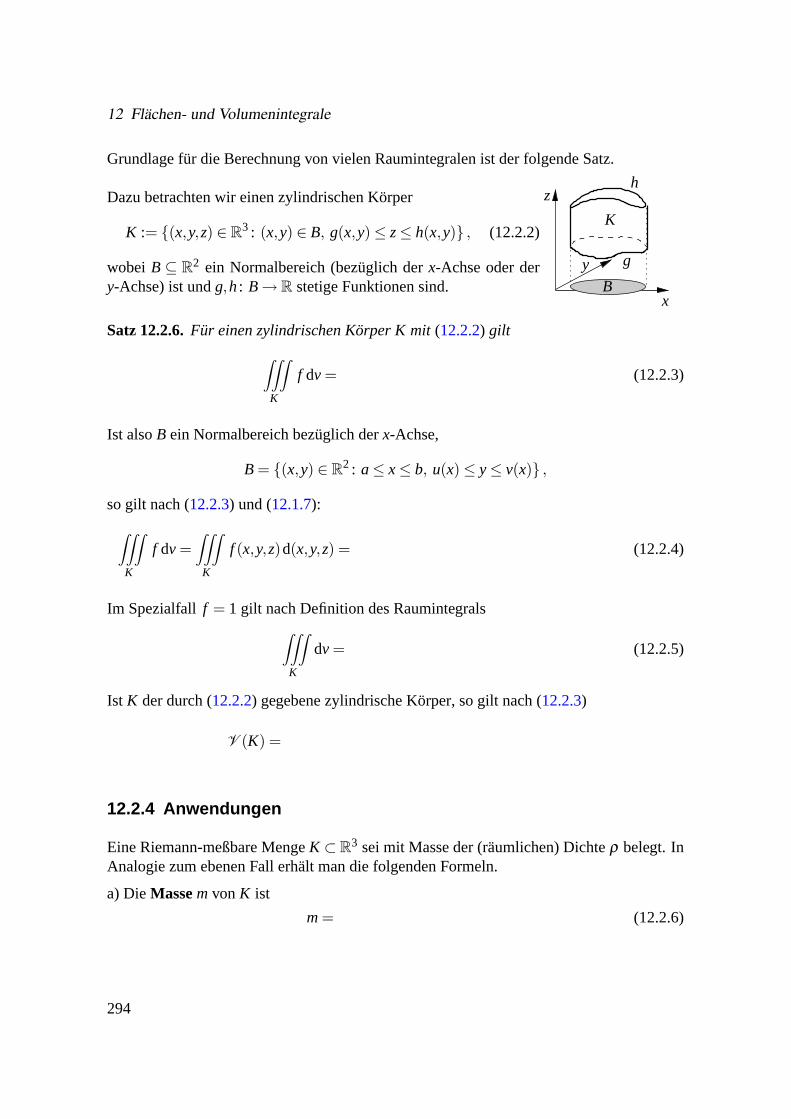
Dazu betrachten wir einen zylindrischen Körper
K := {(x,y,z) ∈ R3 : (x,y) ∈ B, g(x,y)≤ z≤ h(x,y)} , (12.2.2)
wobei B⊆ R2 ein Normalbereich (bezüglich derx-Achse oder dery-Achse) ist undg,h: B→ R stetige Funktionen sind.
K
B
h
gy
z
x
Satz 12.2.6.Für einen zylindrischen Körper K mit(12.2.2) gilt∫∫∫K
f dv =∫∫B
[∫ h(x,y)
z=g(x,y)f (x,y,z)dz
]db. (12.2.3)
Ist alsoB ein Normalbereich bezüglich derx-Achse,
B = {(x,y) ∈ R2 : a≤ x≤ b, u(x)≤ y≤ v(x)} ,
so gilt nach (12.2.3) und (12.1.7):∫∫∫K
f dv =∫∫∫
K
f (x,y,z)d(x,y,z) =∫ b
x=a
[∫ v(x)
y=u(x)
[∫ h(x,y)
z=g(x,y)f (x,y,z)dz
]dy
]dx . (12.2.4)
Im Spezialfall f = 1 gilt nach Definition des Raumintegrals∫∫∫K
dv = V (K) Volumen vonK . (12.2.5)
Ist K der durch (12.2.2) gegebene zylindrische Körper, so gilt nach (12.2.3)
V (K) =∫∫B
[h−g]db =∫∫B
[h(x,y)−g(x,y)]d(x,y) .
12.2.4 Anwendungen
Eine Riemann-meßbare MengeK ⊂ R3 sei mit Masse der (räumlichen) Dichteρ belegt. InAnalogie zum ebenen Fall erhält man die folgenden Formeln.
a) DieMassem vonK ist
m=∫∫∫
K
ρ(x,y,z)d(x,y,z) . (12.2.6)
294
12.2 Integration über räumliche Mengen
Beispiel 12.2.7.Im x,y,z-Raum seiK der von dem Rotationsparaboloid
F1 = {(x,y,z) : z=√
3(x2 +y2)}
und der Kugel
F2 = {(x,y,z) : x2 +y2 +z2 = 4}
berandete, oberhalb derx,y-Ebene gelegene Körper.K sei mit Masse der Dichteρ(x,y,z) =z belegt. Gesucht ist die Massem vonK.
Lösung: 1. Darstellung vonK: Die SchnittkurveC vonF1 undF2 ergibt sich aus
x2 +y2 +3(x2 +y2)2 = 4.
Mit a := x2 + y2 folgt a2 + 13a− 4
3 = 0 alsoa = 1 (beachtea≥ 0). C ist also ein Kreis umdiez-Achse mit Radius1 auf der Ebenez=
√3. Somit gilt
K = {(x,y,z) ∈ R3 : (x,y) ∈ B,√
3(x2 +y2)≤ z≤√
4− (x2 +y2)}
mit
B = {(x,y) ∈ R2 : −1≤ x≤ 1, −√
1−x2≤ y≤√
1−x2} .
2. Berechnung des Integrals: Mit (12.2.6) und (12.2.4) erhalten wir
m=∫∫∫
K
zdv =∫ 1
x=−1
[∫ √1−x2
y=−√
1−x2
[∫ √4−(x2+y2)
z=√
3(x2+y2)zdz
]dy
]dx
=∫ 1
x=−1
[∫ √1−x2
y=−√
1−x2
12
[4− (x2 +y2)−3(x2 +y2)2]dy
]dx .
Die weitere Auswertung der Integrale in kartesischen Koordinaten ist recht mühevoll. Wirbrechen die Rechnung hier ab. In12.3werden wir eine Methode behandeln, die schnellerzum Ziele führt.
b) Das statische MomentvonK bezüglich derx,y-Ebene ist
Mxy :=∫∫∫
K
zρ(x,y,z)d(x,y,z) . (12.2.7)
Analog sind die statischen Momente bezüglich anderer Ebenen definiert.
295
12 Flächen- und Volumenintegrale
c) Der Schwerpunkt (oderMassenmittelpunkt) S= (xs,ys,zs) von K ergibt sich wiederaus der Bedingung, daß die dort konzentrierte Gesamtmassem dieselben statischen Mo-mente habe wieK. So ist zum Beispielmzs = Mxy. Insgesamt ergibt sich
xs =1m
∫∫∫K
x ·ρ(x,y,z)d(x,y,z) ,
ys =1m
∫∫∫K
y·ρ(x,y,z)d(x,y,z) , (12.2.8)
zs =1m
∫∫∫K
z·ρ(x,y,z)d(x,y,z) .
Ist ρ(x,y,z) = ρ0 (konstant), dann istm= ρ0∫∫∫K
dv = ρ0V (K). Mit (12.2.8) erhält man den
geometrischen SchwerpunktS(xs, ys, zs) vonK:
xs =1
V (K)
∫∫∫K
xd(x,y,z) , ys =1
V (K)
∫∫∫K
yd(x,y,z) , zs =1
V (K)
∫∫∫K
zd(x,y,z) .
d) Man definiert dasTrägheitsmoment (TM) vonK bezüglich einer Ebene, einer Geradenbeziehungsweise eines Punktes durch die Formel
I =∫∫∫
K
r2 ·ρ dv =∫∫∫
K
r2(x,y,z) ·ρ(x,y,z)d(x,y,z) (12.2.9)
und folgende Tabelle:Bezeichnung planares TM axiales TM polares TM
von I bez.x,y-Ebene bez.z-Achse bez. Nullpunktr2(x,y,z) = z2 x2 +y2 x2 +y2 +z2
Es istr also der Abstand eines variablen Punktes des Körpers vom Bezugsobjekt. Für dasplanare Trägheitsmoment bezüglich derx,y-Ebene schreibt man stattI auchIxy; entspre-chendIz beziehungsweiseI0. Die Trägheitsmomente bezüglich anderer Ebenen, Geradenund Punkten sind analog definiert.
Beispiel 12.2.8.SeiK das von den Ebenenx= 0,y= 0,z= 0 undx+y+z−1= 0 berandeteTetraeder. Die Dichte seiρ(x,y,z) = 1 (konstant). Gesucht ist das axiale TrägheitsmomentIz bezüglich derz-Achse.Lösung: Man erhält man
Iz =∫∫∫
K
(x2 +y2)d(x,y,z) =∫ 1
x=0
[∫ 1−x
y=0
[∫ 1−x−y
z=0(x2 +y2)dz
]dy
]dx
=∫ 1
x=0
[∫ 1−x
y=0(x2 +y2)(1−x−y)dy
]dx = · · ·= 1
30. x
z
y
296
12.3 Integration mittels Koordinatentransformation
12.3 Integration mittels Koordinatentransformation
12.3.1 Allgemeiner Fall
Wir erläutern das Ziel des Abschnittes an einem Beispiel.
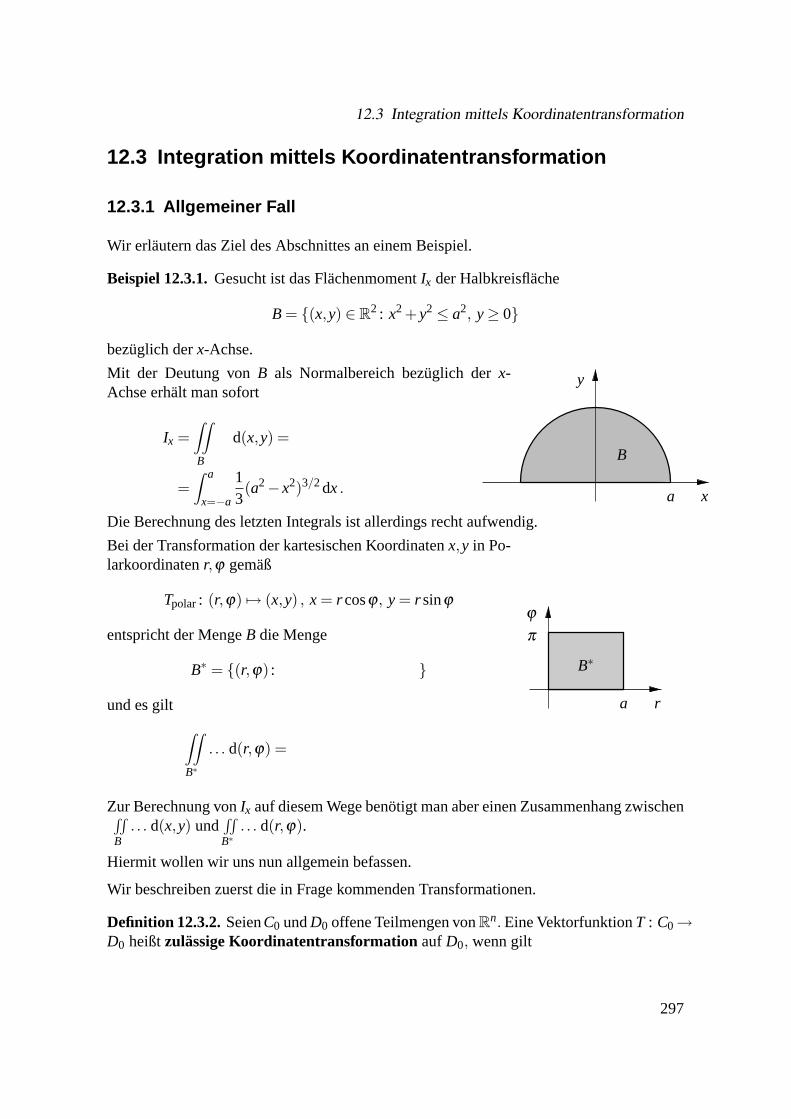
Beispiel 12.3.1.Gesucht ist das FlächenmomentIx der Halbkreisfläche
B = {(x,y) ∈ R2 : x2 +y2≤ a2, y≥ 0}
bezüglich derx-Achse.
Mit der Deutung vonB als Normalbereich bezüglich derx-Achse erhält man sofort
Ix =∫∫B
y2d(x,y) =∫ a
x=−a
[∫ √a2−x2
y=0y2dy
]dx
=∫ a
x=−a
13
(a2−x2)3/2dx . a
y
x
B
Die Berechnung des letzten Integrals ist allerdings recht aufwendig.
Bei der Transformation der kartesischen Koordinatenx,y in Po-larkoordinatenr,ϕ gemäß
Tpolar: (r,ϕ) 7→ (x,y) , x = r cosϕ, y = r sinϕ
entspricht der MengeB die Menge
B∗ = {(r,ϕ) : 0≤ r ≤ a, 0≤ ϕ ≤ π}
und es gilt ∫∫B∗
. . . d(r,ϕ) =∫ a
r=0
[∫π
ϕ=0. . . dϕ
]dr .
a
π
ϕ
r
B∗
Zur Berechnung vonIx auf diesem Wege benötigt man aber einen Zusammenhang zwischen∫∫B. . . d(x,y) und
∫∫B∗. . . d(r,ϕ).
Hiermit wollen wir uns nun allgemein befassen.
Wir beschreiben zuerst die in Frage kommenden Transformationen.
Definition 12.3.2.SeienC0 undD0 offene Teilmengen vonRn.Eine VektorfunktionT : C0→D0 heißtzulässige KoordinatentransformationaufD0, wenn gilt
297
12 Flächen- und Volumenintegrale
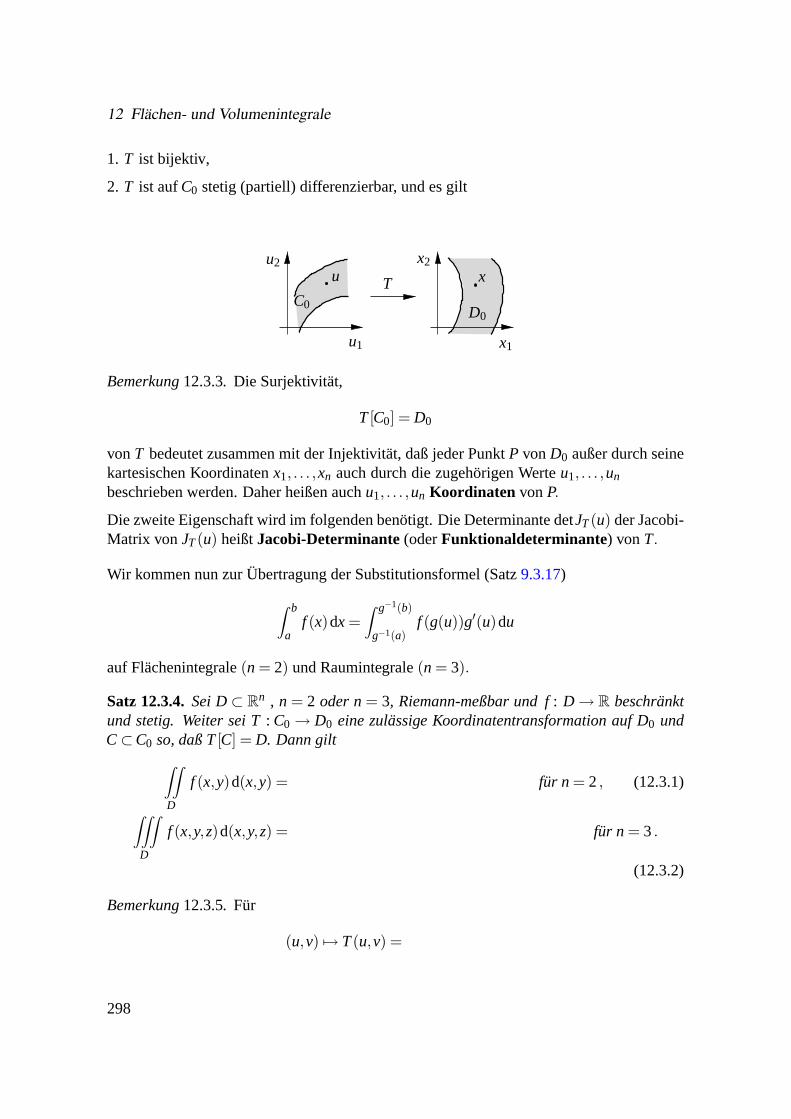
1. T ist bijektiv, d.h., zu jedemx∈ D0 existiert genau einu∈C0 mit T(u) = x.
2. T ist aufC0 stetig (partiell) differenzierbar, und es gilt
detJT(u) 6= 0 für alleu∈C0
x1u1
T
u2 x2
C0D0
xu
Bemerkung12.3.3. Die Surjektivität,
T[C0] = D0
vonT bedeutet zusammen mit der Injektivität, daß jeder PunktP vonD0 außer durch seinekartesischen Koordinatenx1, . . . ,xn auch durch die zugehörigen Werteu1, . . . ,un eindeutigbeschrieben werden. Daher heißen auchu1, . . . ,un Koordinaten vonP.
Die zweite Eigenschaft wird im folgenden benötigt. Die Determinante detJT(u) der Jacobi-Matrix vonJT(u) heißtJacobi-Determinante(oderFunktionaldeterminante) vonT.
Wir kommen nun zur Übertragung der Substitutionsformel (Satz9.3.17)
∫ b
af (x)dx =
∫ g−1(b)
g−1(a)f (g(u))g′(u)du
auf Flächenintegrale(n = 2) und Raumintegrale(n = 3).
Satz 12.3.4.Sei D⊂ Rn , n = 2 oder n= 3, Riemann-meßbar und f: D→ R beschränktund stetig. Weiter sei T: C0→ D0 eine zulässige Koordinatentransformation auf D0 undC⊂C0 so, daß T[C] = D. Dann gilt∫∫
D
f (x,y)d(x,y) =∫∫C
f (T(u,v)) |detJT(u,v)| d(u,v) für n = 2, (12.3.1)
∫∫∫D
f (x,y,z)d(x,y,z) =∫∫∫
C
f (T(u,v,w)) |detJT(u,v,w)| d(u,v,w) für n = 3.
(12.3.2)
Bemerkung12.3.5. Für
(u,v) 7→ T(u,v) = (x(u,v),y(u,v))
298

12.3 Integration mittels Koordinatentransformation
bzw.
(u,v,w) 7→ T(u,v,w) = (x(u,v,w),y(u,v,w),z(u,v,w))
haben wir
f (T(u,v)) = f (x(u,v),y(u,v)) bzw. f (T(u,v,w)) = f (x(u,v,w),y(u,v,w),z(u,v,w))
und
detJT(u,v) =∂ (x,y)∂ (u,v)
(u,v) :=∣∣∣∣ xu(u,v) xv(u,v)
yu(u,v) yv(u,v)
∣∣∣∣,detJT(u,v,w) =
∂ (x,y,z)∂ (u,v,w)
(u,v,w) :=
∣∣∣∣∣∣xu(u,v,w) xv(u,v,w) xw(u,v,w)yu(u,v,w) yv(u,v,w) yw(u,v,w)zu(u,v,w) zv(u,v,w) zw(u,v,w)
∣∣∣∣∣∣.Motivation von (12.3.1): Einer Zerlegung vonC mittels Koordinatenlinienu = ui undv = vi entspricht eine Zerlegung vonD in TeilmengenDi .
ai
biT
v y
CiDi
u xui
vi
Man approximiert nun die MengeDi durch das von den Vektoren
ai :=4ui
(xu(ui ,vi)yu(ui ,vi)
)und bi :=4vi
(xv(ui ,vi)yv(ui ,vi)
)mit4u,4v> 0 aufgespannte Parallelogramm. Für den Flächeninhalt|Di | vonDi gilt dann
|Di | ≈∣∣∣∣ a1
i b1i
a2i b2
i
∣∣∣∣=∣∣∣∣ xu(ui ,vi) xv(ui ,vi)
yu(ui ,vi) yv(ui ,vi)
∣∣∣∣4ui4vi .
Mit dem üblichen Summations- und Verfeinerungsprozeß folgt hieraus die Formel (12.3.1).Im Bild ist übrigens angedeutet, daß die Koordinatenlinienu = ui bzw. v = vi in der x,y-Ebene im allgemeinen nicht geradlinig (wie in deru,v-Ebene) sind. Daher heißenu,v auchkrummlinige Koordinaten .
Bemerkung12.3.6. Aufgrund der Sätze12.1.10, 12.2.4gelten (12.3.1) und (12.3.2) auch,wennC\C0 undD\D0 Nullmengen imR2 oderR3 sind.
299

12 Flächen- und Volumenintegrale
12.3.2 Ebene Polarkoordinaten
Definition 12.3.7. SeienC,D ⊆ R2. Eine AbbildungTpolar : C→ D heißt(ebene) Polar-koordinatenfunktion , wenn
Tpolar(r,ϕ) = (r cosϕ, r sinϕ) für (r,ϕ) ∈C .
Gilt Tpolar(r,ϕ) = (x,y), dann heißenr undϕ (ebene) Polarkoordinatendes Punktes(x,y).
Bemerkung12.3.8. Einem Paar(r,ϕ) ∈C wird durchTpolar also der Punkt(x,y) ∈ D mit
x = r cosϕ , y = r sinϕ
zugeordnet.
Wir betrachtenC1 := {(r,ϕ) ∈ R2 : r ≥ 0, 0≤ ϕ < 2π} .
Dann giltD1 := Tpolar[C1] = R2 ,
d.h., mittelsTpolar auf C1 hätten wir eine Beschreibung aller Punkte inR2 durch Polarko-ordinaten. Leider gilt aberTpolar(0,ϕ) = (0,0) für jedesϕ ∈ [0,2π[, d.h., der Nullpunktderx,y-Ebene wird durchr,ϕ nicht eindeutig dargestellt. Außerdem ist die MengeC1 nichtoffen.
Wir müssen alsoC1 und damitD1 einschränken, um eine zulässige Koordinatentransforma-tion zu erhalten. Daher setzen wir
C0 := {(r,ϕ) ∈ R2 : r > 0, 0< ϕ < 2π} ,D0 := R2\N0 , wobeiN0 := {(x,0) ∈ R2 : x≥ 0} .
Tpolar
ϕ y
r x
C0
2π
D0
r
ϕ
Im Bild sollen die gestrichelten Linien andeuten, daß diese Teile des Randes nicht zuC0
bzw. D0 gehören. Jeder Punkt(x,y) ∈ D0 wird durch einen Punkt(r,ϕ) ∈ C0 eindeutigdargestellt, d.h.,Tpolar ist eine Bijektion vonC0 aufD0.
Für die Jacobi-Determinante vonTpolar erhält man
detJTpolar (r,ϕ) =∂ (x,y)∂ (r,ϕ)
(r,ϕ) =∣∣∣∣ xr(r,ϕ) xϕ(r,ϕ)
yr(r,ϕ) yϕ(r,ϕ)
∣∣∣∣=∣∣∣∣ cosϕ −r sinϕ
sinϕ r cosϕ
∣∣∣∣ ,
300

12.3 Integration mittels Koordinatentransformation
alsodetJTpolar (r,ϕ) = r . (12.3.3)
Die partiellen Ableitungen sind aufC0 stetig, und nach (12.3.3) gilt detJTpolar (r,ϕ) > 0 füralle (r,ϕ) ∈C0. Somit ist
Tpolar : C0→ D0
eine zulässige Koordinatentransformation aufD0.
Die Koordinatenlinien vonTpolar in derx,y-Ebene sind
r = r0 : Kreise um 0 mit dem Radiusr0,ϕ = ϕ0 : Halbgeraden von 0 aus mit dem Winkelϕ0.
Die Transformationsformel 12.3.1lautetfür Polarkoordinaten explizit∫∫D
f (x,y)d(x,y) =∫∫C
f (r cosϕ, r sinϕ)r d(r,ϕ) , Tpolar [C] = D . (12.3.4)
Bemerkung12.3.9. Die MengenC1\C0 undD1\D0 sindR2-Nullmengen, so daß (12.3.4)nach Bemerkung12.3.6für beliebige, Riemann-meßbare MengeD (undC) in R2 gilt.
Beispiel 12.3.10.Wir kommen auf Beispiel12.2.7zurück und verwenden die dort ein-geführten Bezeichnungen. Nun soll das FlächenmomentIx der HalbkreisflächeB mittelsPolarkoordinaten berechnet werden.
Lösung: Im Hinblick auf die MengenC0 undD0 setzen wir
C := {(r,ϕ) ∈ R2 : 0≤ r ≤ a, 0≤ ϕ ≤ π} ,
Tpolar
ϕ
ra x
y
−a a
C
π
B
Dann istC\C0 eine Nullmenge und es giltTpolar[C] = B. Daher gilt
Ix =∫∫B
y2d(x,y) =∫∫C
(r sinϕ)2r d(r,ϕ) =∫ a
r=0
[r3∫
π
ϕ=0sin2
ϕ dϕ
]dr
=∫ a
r=0r3[
12
ϕ− 14
sin2ϕ
]π
ϕ=0dr =
∫ a
r=0r3π
4dr =
π
8a4 .
301

12 Flächen- und Volumenintegrale
12.3.3 Kugelkoordinaten
Definition 12.3.11. Seien C,D ⊆ R3. Eine AbbildungTKugel : C→ D heißtKugelkoordinatenfunktion oder räum-liche Polarkoordinatenfunktion , wenn
TKugel(r,ϑ ,ϕ) = (r sinϑ cosϕ, r sinϑ sinϕ, r cosϑ) für (r,ϕ)∈C.
Gilt TKugel(r,ϑ ,ϕ) = (x,y,z), dann heißenr, ϕ undϑ Kugelko-ordinaten des Punktes(x,y,z).
r
z
ϑ
ϕ
x
y
Bemerkung12.3.12. Einem Paar(r,ϑ ,ϕ) ∈C wird durchTKugel also der Punkt(x,y,z) ∈Dmit
x = r sinϑ cosϕ , y = r sinϑ sinϕ , z= r cosϑ (12.3.5)
zugeordnet.
MitC1 = {(r,ϑ ,ϕ) : r ≥ 0, 0≤ ϑ ≤ π, 0≤ ϕ < 2π}
haben wirD1 := TKugel[C1] = R3 .
Leider ist auch hierTKugel aufC1 nicht eineindeutig undC1 ist nicht offen. Somit haben wirC1 und damitD1 geeignet einzuschränken, um eine zulässige Koordinatentransformation zuerhalten.
Seien dazu
C0 := {(r,ϑ ,ϕ) ∈ R3 : r > 0, 0< ϑ < π, 0< ϕ < 2π} ,D0 := R3\N0, wobeiN0 := {(x,y,z) ∈ R3 : x≥ 0, y = 0} .
Dann istTKugel: C0→ D0 bijektiv. Weiter gilt
detJTKugel(r,ϑ ,ϕ) =
∣∣∣∣∣∣sinϑ cosϕ r cosϑ cosϕ −r sinϑ sinϕ
sinϑ sinϕ r cosϑ sinϕ r sinϑ cosϕ
cosϑ −r sinϑ 0
∣∣∣∣∣∣= r2sinϑ> 0
für (r,ϑ ,ϕ) ∈C0. Damit istTKugel: C0→ D0 eine zulässige Koordinatentransformation.
Bemerkung12.3.13. N0 ist die (von derz-Achse berandete)x,z-Halbebene mitx≥ 0. Einebeschränkte räumliche Menge schneidet diese “Ausnahmemenge” höchstens in einer Null-menge vonR3. Bei der Berechnung von Raumintegralen können wir die MengeN0 alsoignorieren (Satz12.2.4).
Die KoordinatenflächenvonTKugel im x,y,z-Raum sind
302
12.3 Integration mittels Koordinatentransformation
r = r0 : Kugeln um 0 mit dem Radiusr0,ϑ = ϑ0 : Kegel mit der Spitze in 0,ϕ = ϕ0 : Halbebenen mit derz-Achse als Rand.
Die Transformationsformel (12.3.2) lautetfür Kugelkoordinaten :∫∫∫D
f (x,y,z)d(x,y,z) =∫∫∫
C
f (r sinϑ cosϕ, r sinϑ sinϕ, r cosϑ)r2sinϑ d(r,ϑ ,ϕ) ,
(12.3.6)
TKugel[C] = D .
Bemerkung12.3.14. Die MengenC1\C0 undD1\D0 sindR3-Nullmengen, so daß (12.3.6)nach Bemerkung12.3.6für beliebige, Riemann-meßbare MengeD (undC) in R3 gilt.
Man wird (12.3.6) dann anwenden, wenn die MengeD (oder wenigstens Teile davon) vonKoordinatenflächen der FunktionTKugel berandet wird.
Beispiel 12.3.15.Gesucht ist das axiale Trägheitsmoment der HalbkugelD = {(x,y,z) ∈ R3 : x2 +y2 +z2≤ a2, z≥ 0}
bezüglich derz-Achse. Die Dichte seiρ(x,y,z) = 1 für alle(x,y,z) ∈ D.Lösung: Nach (12.2.9) ist
Iz =∫∫∫
D
(x2 +y2)d(x,y,z) . x−a a
z
ϑ
In Kugelkoordinaten wirdD beschrieben durch
C = {(r,ϑ ,ϕ) ∈ R3 : 0≤ r ≤ a, 0≤ ϑ ≤ π
2, 0≤ ϕ ≤ 2π} .
Somit gilt nach (12.3.6)
Iz =∫∫∫
C(r2sin2
ϑ cos2ϕ+r2sin2ϑ sin2
ϕ)r2sinϑ d(r,ϑ ,ϕ)
=∫
π/2
0=0
[∫ 2π
ϕ=0
[∫ a
r=0r4sin3
ϑ dr
]dϕ
]dϑ
=∫
π/2
ϑ=0
[2π
a5
5sin3
ϑ
]dϑ .
303

12 Flächen- und Volumenintegrale
Beispiel 12.3.16.Der Kegel
K1 = {(x,y,z) : 3x2 +3y2−z2≤ 0}
bohrt aus dem Kugelkörper
K2 = {(x,y,z) : x2 +y2 +(z−1)2≤ 1}
einen KörperD aus. Gesucht ist der geometrische SchwerpunktSvonD. x
z
D
K2
K1
Lösung:S= (xs, ys, zs) ist nach (12.2.8) zu berechnen. Aus Symmetriegründen istxs = ys =0. Weiter gilt
zs =1
V (D)
∫∫∫D
zd(x,y,z) mit V (D) =∫∫∫
D
d(x,y,z) .
K1 ist eine Koordinatenfläche vonTKugel. Daher empfiehlt sich die Verwendung von Ku-gelkoordinaten. Hingegen istK2 eine Kugelfläche mit dem Mittelpunkt(0,0,1), also keineKoordinatenfläche vonTKugel.
Beschreibung vonK1 in Kugelkoordinaten: Mit (12.3.5) haben wir
0≥ 3(r sinϑ cosϕ)2 +3(r sinϑ sinϕ)2− (r cosϑ)2
= 3r2(sin2ϑ −cos2ϑ) ,
alsoT−1
Kugel[K1] = {(r,ϑ ,ϕ) ∈ R3 : 0≤ r < ∞, 0≤ ϑ ≤ π/6, 0≤ ϕ ≤ 2π} .Beschreibung vonK2 in Kugelkoordinaten:
1≥ (r sinϑ cosϕ)2 +(r sinϑ sinϕ)2 +(r cosϑ −1)2
= r2sin2ϑ + r2cos2ϑ +2r cosϑ +1
und damit
T−1Kugel[K2] = {(r,ϑ ,ϕ) ∈ R3 : 0≤ r ≤ 2cosϑ , 0≤ ϑ ≤ π/2, 0≤ ϕ ≤ 2π} .
Zusammengefaßt erhalten wir
TKugel[C] = D mit C := {(r,ϑ ,ϕ) ∈ R3 : 0≤ r ≤ 2cosϑ , 0≤ ϑ ≤ π
6, 0≤ ϕ ≤ 2π} .
Für das VolumenV (D) vonD erhalten wir
V (D) =∫∫∫
D
d(x,y,z) =∫∫∫
C
r2sinϑ d(r,ϑ ,ϕ)
=∫ 2π
ϕ=0
[∫π/6
ϑ=0
[∫ 2cosϑ
r=0r2sinϑ dr
]dϑ
]dϕ
=∫ 2π
ϕ=0
[∫π/6
ϑ=0
83
cos3ϑ sinϑ dϑ
]dϕ =
7π
12.
304

12.3 Integration mittels Koordinatentransformation
Aus Symmetriegründen ist ¯xs = ys = 0. Weiter gilt
zs =1
V (D)
∫∫∫D
zd(x,y,z) =1
V (D)
∫∫∫C
r cosϑ · r2sinϑ d(r,ϑ ,ϕ)
=127π
∫ 2π
ϕ=0
[∫π/6
ϑ=0
[∫ 2cosϑ
r=0r3cosϑ sinϑ dr
]dϑ
]dϕ
=127π
∫ 2π
ϕ=0
[∫π/6
ϑ=04cos5ϑ sinϑ dϑ
]dϕ =
3728
= 1.32.
12.3.4 Zylinderkoordinaten
Definition 12.3.17. Seien C,D ⊆ R3. Eine AbbildungTZylinder : C→ D heißtZylinderkoordinatenfunktion , wenn
TZylinder(r,ϕ,z) = (r cosϕ, r sinϕ,z) für (r,ϕ,z) ∈C .
Gilt TZylinder(r,ϕ,z) = (x,y,z), dann heißenr, ϕ undzZylinder-koordinaten des Punktes(x,y,z).
r
z
ϕ
x
y
Bemerkung12.3.18. Einem Paar(r,ϕ,z)∈C wird durchTZylinder also der Punkt(x,y,z)∈Dmit
x = r cosϕ , y = r sinϕ , z= z (12.3.7)
zugeordnet.
MitC1 := {(r,ϕ,z) ∈ R3 : r ≥ 0, 0≤ ϕ ≤ 2π}
giltD1 := TZylinder[C1] = R3 .
Wie bei den Polarkoordinaten müssen wirC1 und damitD1 einschränken, um eine zulässigeKoordinatenfunktion zu erhalten. Mit
C0 := {(r,ϕ,z) ∈ R3 : r > 0, 0< ϕ < 2π, z∈ R} , D0 := TZylinder[C0]
ist TZylinder bijektiv vonC0 aufD0. Weiter gilt
detJTZylinder(r,ϕ,z) =
∣∣∣∣∣∣cosϕ −r sinϕ 0sinϕ r cosϕ 0
0 0 1
∣∣∣∣∣∣= r > 0
für (r,ϕ,z) ∈C0, so daßTZylinder eine zulässige Koordinatenfunktion aufD0 ist.
Die KoordinatenflächenvonTZylinder im x,y,z-Raum sind
305
12 Flächen- und Volumenintegrale
r = r0 : Zylinder um diez-Achse,ϕ = ϕ0 : Halbebenen mit derz-Achse als Rand,z= z0 : Ebenen parallel zurx,y-Ebene.
Die Transformationsformel (12.3.2) lautetfür Zylinderkoordinaten :∫∫∫D
f (x,y,z)d(x,y,z) =∫∫∫
C
f (r cosϕ, r sinϕ,z) · r d(r,ϕ,z) , (12.3.8)
TZylinder[C] = D .
Bemerkung12.3.19. Die MengenC1\C0 undD1\D0 sindR3-Nullmengen, so daß (12.3.8)nach Bemerkung12.3.6für beliebige, Riemann-meßbare MengeD (undC) in R3 gilt.
Formel (12.3.8) eignet sich besonders zur Integration über axialsymmetrische räumlicheMengen (Rotationskörper bezüglich derz-Achse). Für räumliche Mengen, welche axial-symmetrisch bezüglich einer anderen Achse sind, kann man eine entsprechende Drehungverwenden.
Beispiel 12.3.20.Wir kommen auf Beispiel12.2.7zurück. Der dort beschriebene, mitMasse der Dichteρ(x,y,z) = z belegte KörperK ist ein Rotationskörper bezüglich derz-Achse. Die gesuchte Masse
m=∫∫∫
K
zd(x,y,z)
soll nun mittels Zylinderkoordinaten berechnet werden.
Beschreibung vonF1 = {(x,yz) : z≥√
3(x2 +y2)} in Zylinderkoordinaten:
z≥√
3(r2cos2ϕ + r2sin2ϕ)
und damit
T−1Zylinder[F1] = {(r,ϕ,z) ∈ R3 : r ≥ 0, 0≤ ϕ ≤ 2π, z≥
√3r2} .
Beschreibung der VollkugelF2 = {(x,y,z) : x2 +y2 +z2≤ 4} in Zylinderkoordinaten:
r2cos2ϕ + r2sin2ϕ +z2≤ 4
und damit
T−1Zylinder[F2] = {(r,ϕ,z) ∈ R3 : 0≤ r ≤ 2, 0≤ ϕ ≤ 2π, z2≤ 4− r2} .
306

12.3 Integration mittels Koordinatentransformation
Hiermit ergibt sich, daß die Menge
C := {(r,ϕ,z) ∈ R3 : 0≤ r ≤ 1, 0≤ ϕ ≤ 2π,√
3r2≤ z≤√
4− r2}
durchTZylinder auf K abgebildet wird. (Beachte den richtigen Durchschnitt!)Also gilt mit(12.3.8)
m=∫∫∫
C
zrd(r,ϕ,z) =∫ 2π
ϕ=0
[∫ 1
r=0
[∫ √4−r2
z=√
3r2zrdz
]dr
]dϕ
=∫ 2π
ϕ=0
[∫ 1
r=0
12
(4− r2−3r4)r dr
]dϕ =
5π
4= 3.927.
Im letzten Beispiel istFZylinder in Kugelkoordinaten die Koordinatenflächer = 2, so daßman auch an die Verwendung von Kugelkoordinaten denken könnte. Hat man aber dieWahl zwischen diesen und Zylinderkoordinaten, so wird man in der Regel letztere wählen,da ihr Zusammenhang mit kartesischen Koordinaten einfacher ist. Natürlich ist bei dieserEntscheidung auch der Integrand zu beachten. Wäre im Beispiel etwa die Dichteρ(x,y,z) =x2 +y2 +z2, so würde man Kugelkoordinaten wählen.
Beispiel 12.3.21.Gegeben sei in derx,z-Ebene der Normalbereich bezüglich derz-Achse
B = {(x,z) ∈ R2 : z1≤ z≤ z2, g(z)≤ x≤ h(z)} .
Bei Rotation vonB um diez-Achse entsteht ein RotationskörperD. In Zylinderkoordinaten wirdD beschrieben durch
C = {(r,ϕ,z)∈R3 : z1≤ z≤ z2, 0≤ ϕ ≤ 2π, g(z)≤ r ≤ h(z)} ,
d.h., es istTZylinder[C] = D.
Shg
z
x
z2
z1
xs
Für das VolumenV (D) gilt
V (D) =∫∫∫
D
d(x,y,z) =∫∫∫
C
r d(r,ϕ,z) =∫ z2
z=z1
[∫ h(z)
r=g(z)
[∫ 2π
ϕ=0r dϕ
]dr
]dz.
Nach Integration überϕ gilt weiter
V (D) = 2π
∫ z2
z=z1
[∫ h(z)
r=g(z)r dr
]dz= 2π
∫ z2
z=z1
[∫ h(z)
x=g(z)xdx
]dz
= 2π
∫∫B
xd(x,z) = 2πA (B) · 1A (B)
∫∫B
xd(x,z) .
307
12 Flächen- und Volumenintegrale
Hierbei istA (B) der Flächeninhalt vonB. Mit (12.1.11) folgt schließlich die2. Guldin-Regel
V (D) = 2π xs ·A (B) ,
also„Volumen des RotationskörpersD ist gleich dem Weg des geometrischen Schwerpunk-tes vonB mal Flächeninhalt vonB“.
308
Recommended
















