Département de génie électrique
et de génie informatique
GEL−1001 Design I
(méthodologie)
Technique 1
Introduction à la commande
automatique
Hiver 2014
Plan
Commande automatique
Systèmes de commande industrielle
Architecture d’implantation
Types de contrôleurs Principales composantes matérielles
Outils logiciels
Langages de programmation
Implantation sur PC
Hiver 2014 GEL−1001 Design I (méthodologie) 2

Commande automatique
Hiver 2014 GEL−1001 Design I (méthodologie) 3
Action d’agir, sans intervention humaine, sur un
système pour l’amener ou le maintenir dans un
état voulu
Types de commande
Commande continue
S’applique à des systèmes dont les variables peuvent prendre
toutes les valeurs possibles dans un intervalle donné
Exemple: ajuster la température de l’eau à l’aide d’un robinet
Commande séquentielle
S’applique à des systèmes dont les variables sont de type tout
ou rien (actifs ou inactifs)
Exemple: allumer une lumière à l’aide d’un interrupteur
Hiver 2014 GEL−1001 Design I (méthodologie) 4

Boucle de rétroaction
Hiver 2014 GEL−1001 Design I (méthodologie) 5
Régulateur
- +
Vent,
Dénivellations,
etc.
Vitesse Accélérateur Vitesse
désirée
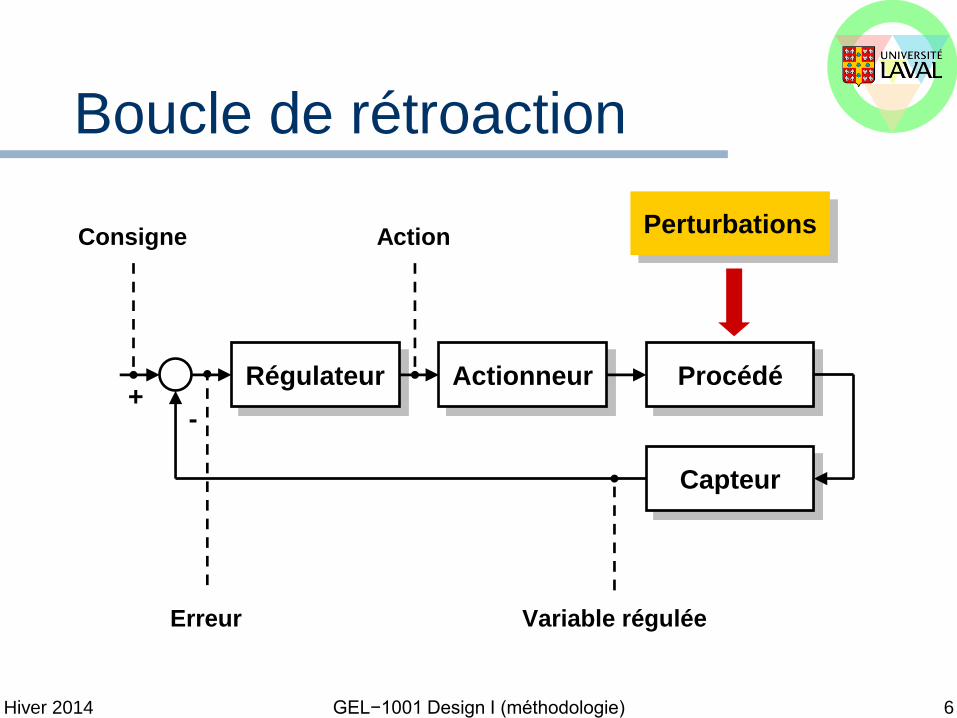
Boucle de rétroaction
Hiver 2014 GEL−1001 Design I (méthodologie) 6
Procédé
Capteur
Actionneur Régulateur
- +
Consigne Action
Variable régulée
Perturbations
Erreur
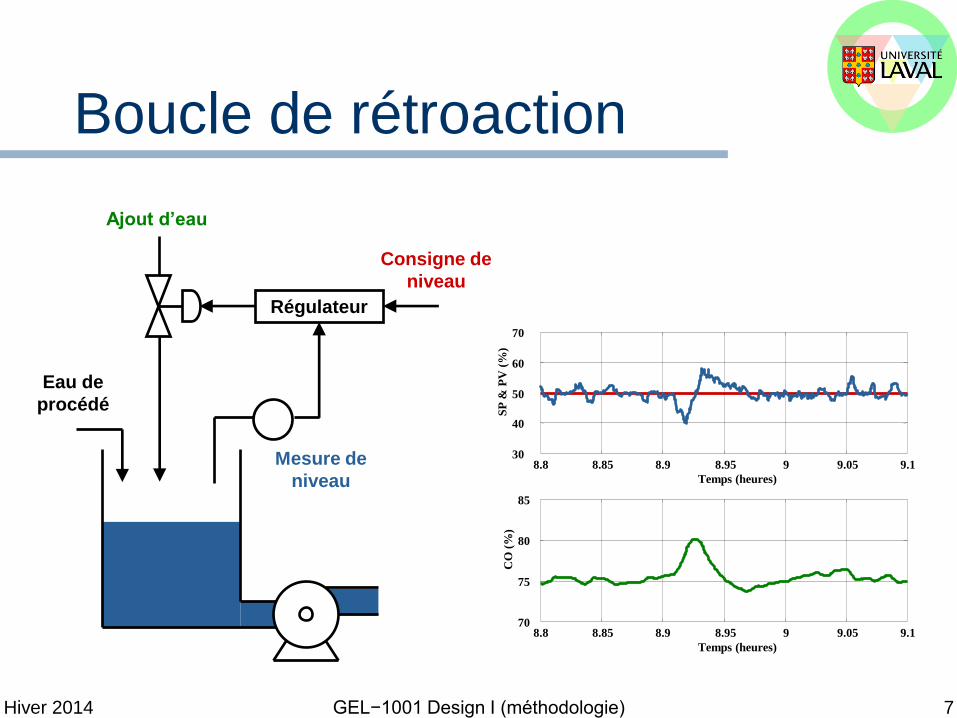
Boucle de rétroaction
Hiver 2014 GEL−1001 Design I (méthodologie) 7
8.8 8.85 8.9 8.95 9 9.05 9.1 30
40
50
60
70
SP
& P
V (
%)
Temps (heures)
8.8 8.85 8.9 8.95 9 9.05 9.1 70
75
80
85 C
O (
%)
Temps (heures)
Eau de
procédé
Ajout d’eau
Mesure de
niveau
Régulateur
Consigne de
niveau

Boucle de rétroaction
Hiver 2014 GEL−1001 Design I (méthodologie) 8
Ajout de
vapeur
Régulateur
Consigne de
température
Mesure de
température
Temps (s)
Te
mp
éra
ture
(oC
)
Temps (s)
Te
mp
éra
ture
(oC
)
60 oC
60 oC
65 oC
62 oC
Régulateur PID
Action
P: proportionnelle
I: intégrale
D: dérivée
Un des régulateurs les plus utilisés
En industrie, plus de 95 % des boucles de
rétroaction sont de de type PID
Hiver 2014 GEL−1001 Design I (méthodologie) 9
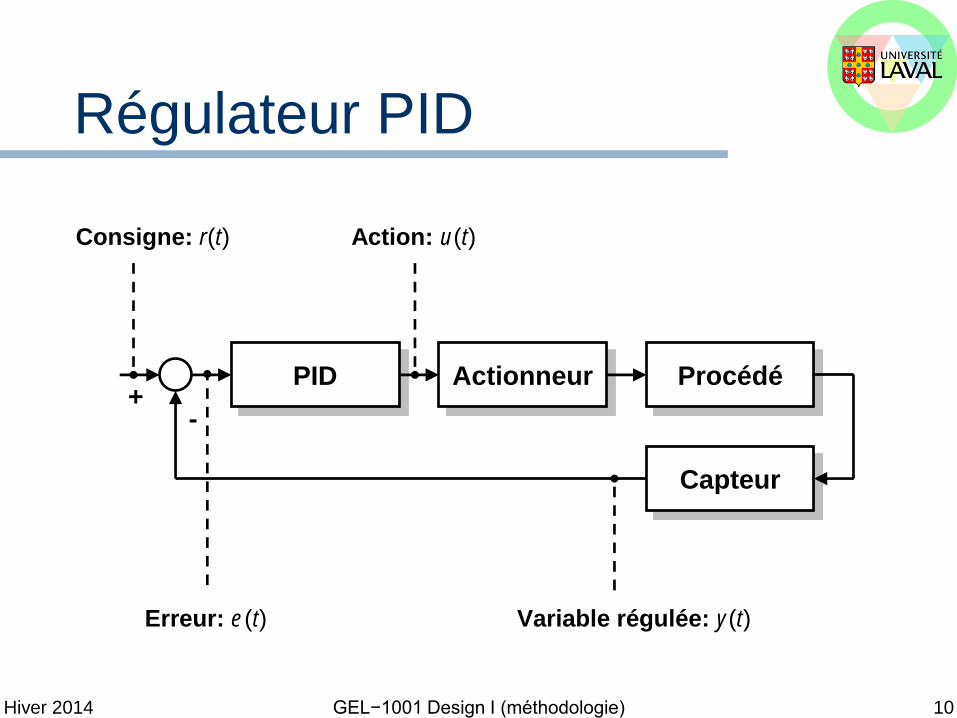
Régulateur PID
Hiver 2014 GEL−1001 Design I (méthodologie) 10
Procédé
Capteur
Actionneur PID
- +
Consigne: r(t) Action: u(t)
Variable régulée: y(t) Erreur: e(t)

Régulateur PID
Hiver 2014 GEL−1001 Design I (méthodologie) 11
dt
)(d)()()(
0
teKdeKteKtu
t
dip
+
P
I
D
e(t) u(t)
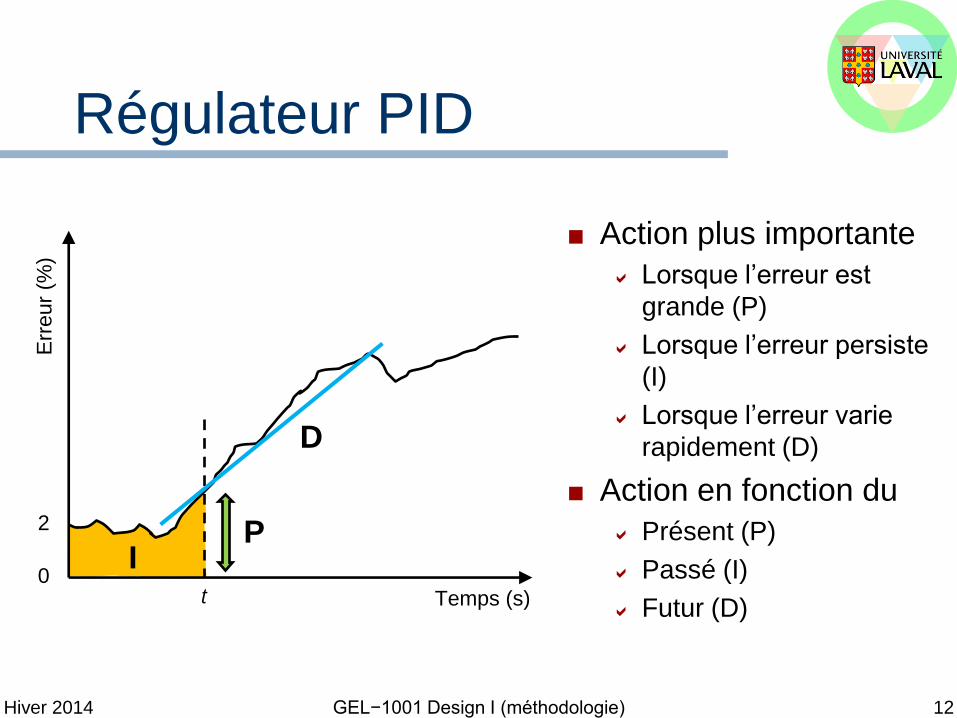
Régulateur PID
Action plus importante
Lorsque l’erreur est
grande (P)
Lorsque l’erreur persiste
(I)
Lorsque l’erreur varie
rapidement (D)
Action en fonction du
Présent (P)
Passé (I)
Futur (D)
Hiver 2014 GEL−1001 Design I (méthodologie) 12
Temps (s)
Err
eur
(%)
0
2
t
P I
D
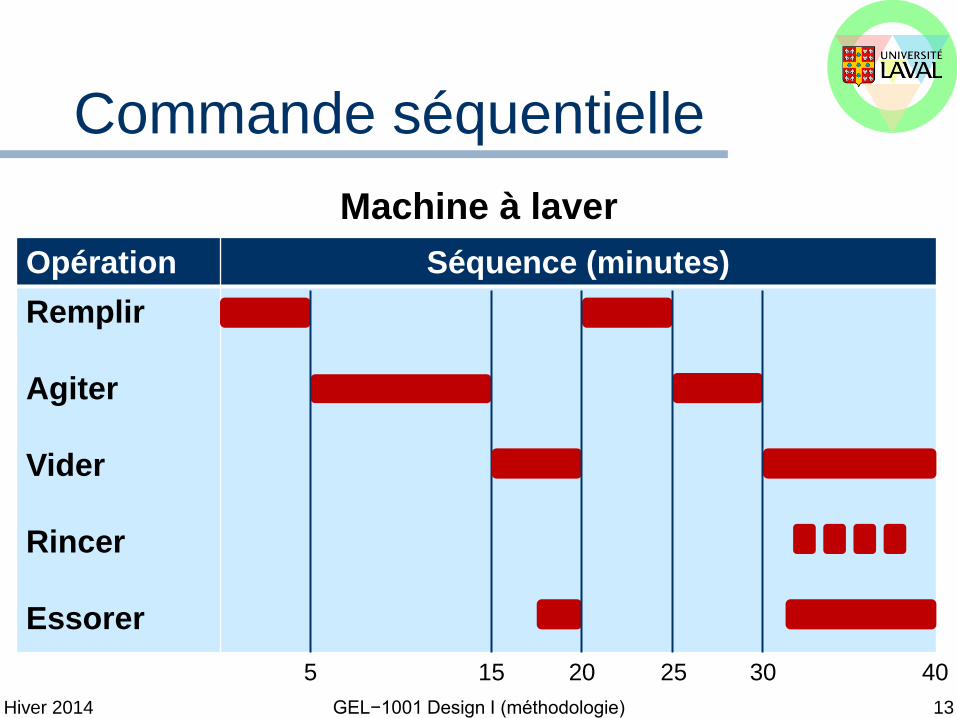
Commande séquentielle
Hiver 2014 GEL−1001 Design I (méthodologie) 13
Opération Séquence (minutes)
Remplir
Agiter
Vider
Rincer
Essorer
5 15 20 25 30 40
Machine à laver

Commande séquentielle
Hiver 2014 GEL−1001 Design I (méthodologie) 14
Remplir
Boucher
Avancer
Bidons présents
Chaîne de montage pour remplir des bidons

Systèmes de commande
industrielle
Hiver 2014 GEL−1001 Design I (méthodologie) 15

Architecture d’implantation
Hiver 2014 GEL−1001 Design I (méthodologie) 16
Équipements pour la fabrication d’un produit
Prise de mesure et action sur les équipements
Séquences automatiques et stratégies de
contrôle
Interfaces permettant aux opérateurs de
commander et superviser les opérations
Planification et gestion de la production
Procédé
Instrumentation
Commande
Opération
Gestion
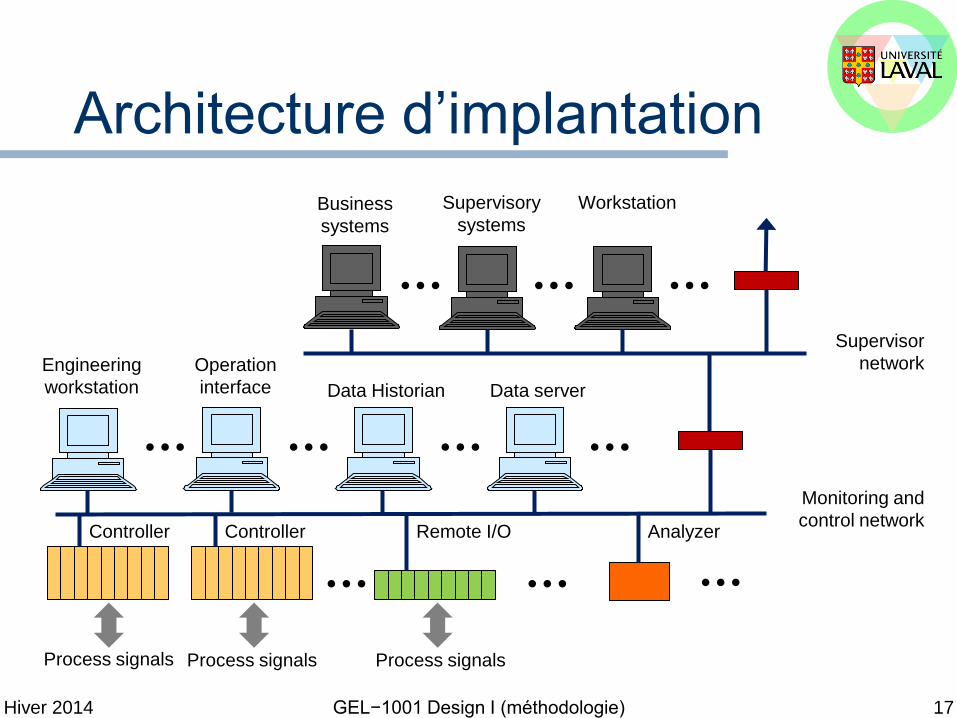
Architecture d’implantation
Hiver 2014 GEL−1001 Design I (méthodologie) 17
Controller Controller Remote I/O Analyzer
Monitoring and
control network
Process signals Process signals Process signals
Operation
interface
Engineering
workstation Data server Data Historian
Business
systems
Supervisor
network
Supervisory
systems
Workstation
Types de contrôleurs
Contrôleur simple boucle
Single Loop Controller (SLC)
Système de contrôle distribué
Distributed Control System (DCS)
Automate programmable
Programmable Logic Controller (PLC)
Autres
Programmable automation controller (PAC)
SoftPLC, SoftDCS
Supervisory Control and Data Acquisition (SCADA)
Etc.
Hiver 2014 GEL−1001 Design I (méthodologie) 18

Single Loop Controller (SLC)
Hiver 2014 GEL−1001 Design I (méthodologie) 19
Moore Omega
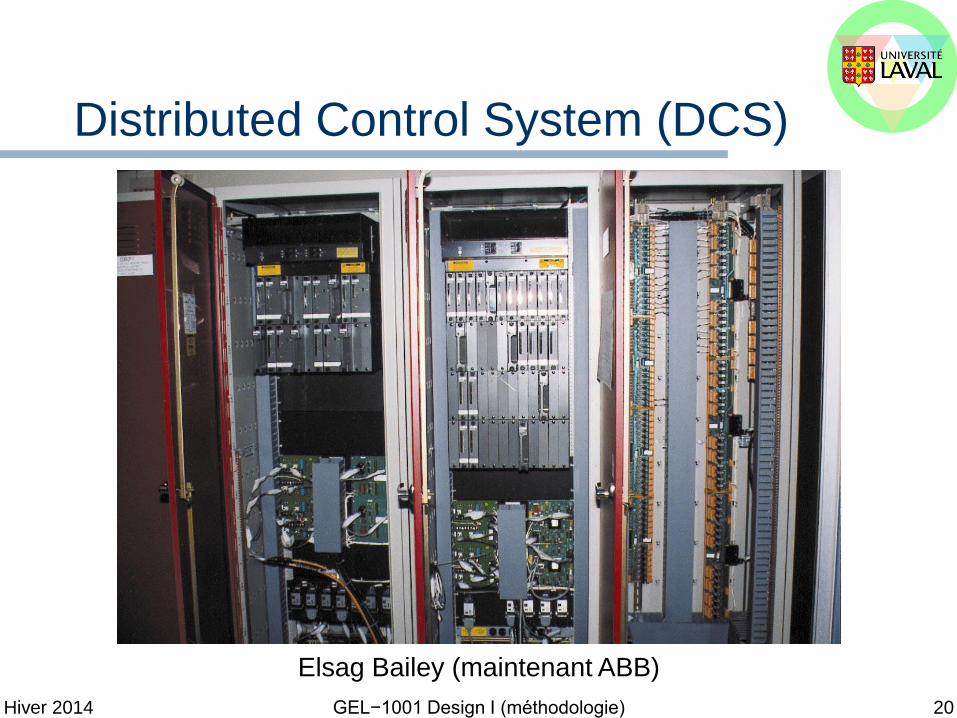
Distributed Control System (DCS)
Hiver 2014 GEL−1001 Design I (méthodologie) 20
Elsag Bailey (maintenant ABB)

Programmable Logic Controller
(PLC)
Hiver 2014 GEL−1001 Design I (méthodologie) 21
Modicon (maintenant Schneider Electric)
DCS/PLC/PAC : composantes
Alimentation
Processeur
Interface de communication
Modules d’entrée/sortie discrètes
Modules d’entrée/sortie continues
Etc.
Hiver 2014 GEL−1001 Design I (méthodologie) 22
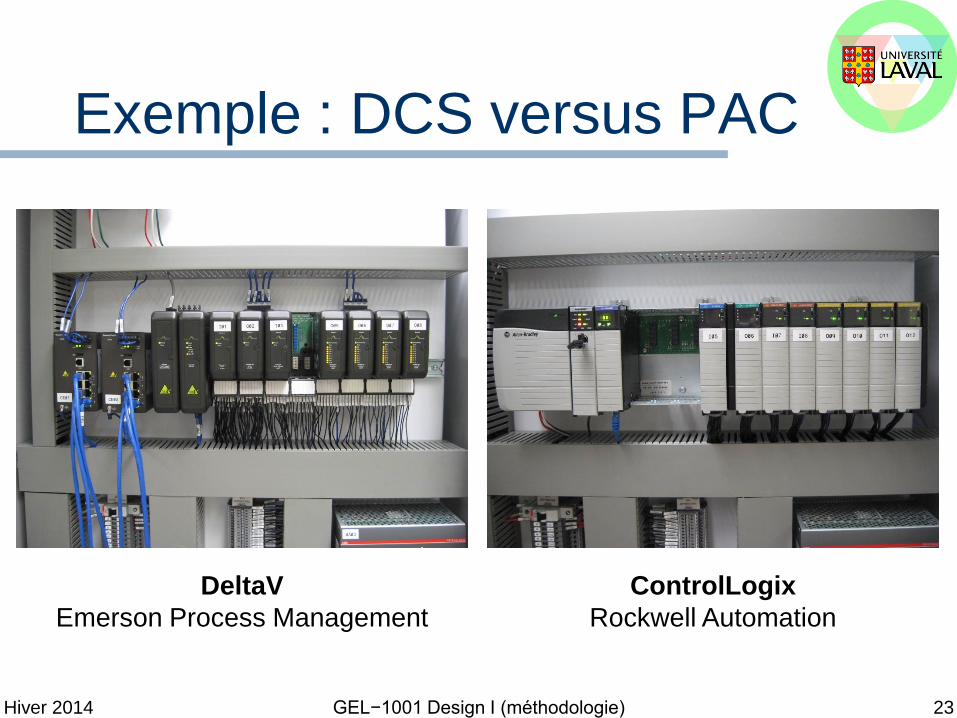
Exemple : DCS versus PAC
Hiver 2014 GEL−1001 Design I (méthodologie) 23
DeltaV
Emerson Process Management
ControlLogix
Rockwell Automation
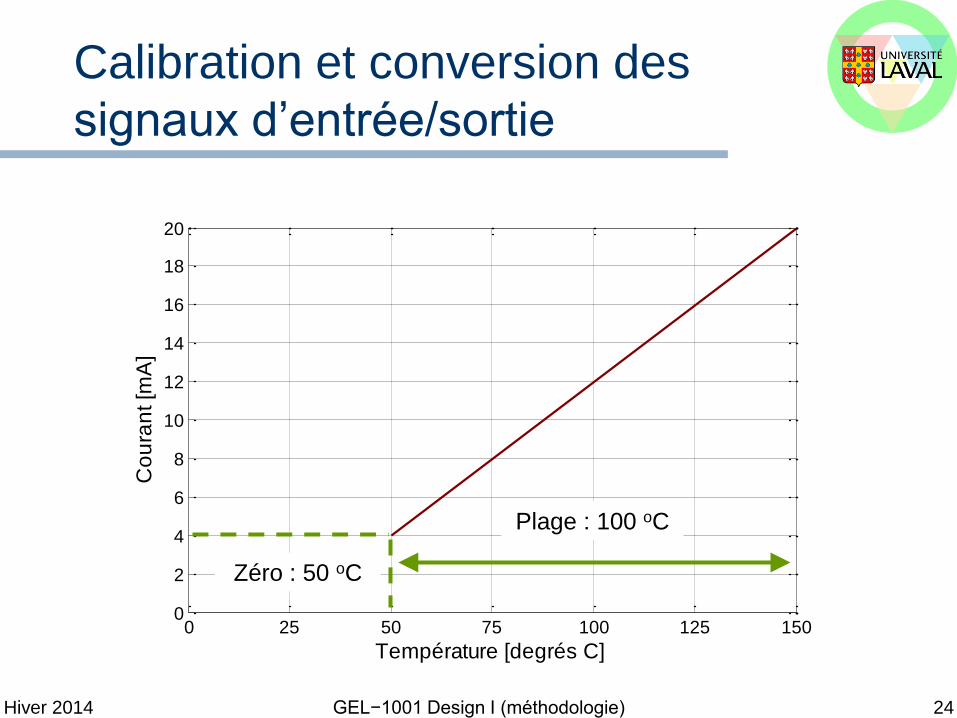
Calibration et conversion des
signaux d’entrée/sortie
Hiver 2014 GEL−1001 Design I (méthodologie) 24
0 25 50 75 100 125 1500
2
4
6
8
10
12
14
16
18
20
Température [degrés C]
Co
ura
nt [m
A]
Zéro : 50 oC
Plage : 100 oC
Hiver 2014 GEL−1001 Design I (méthodologie) 25
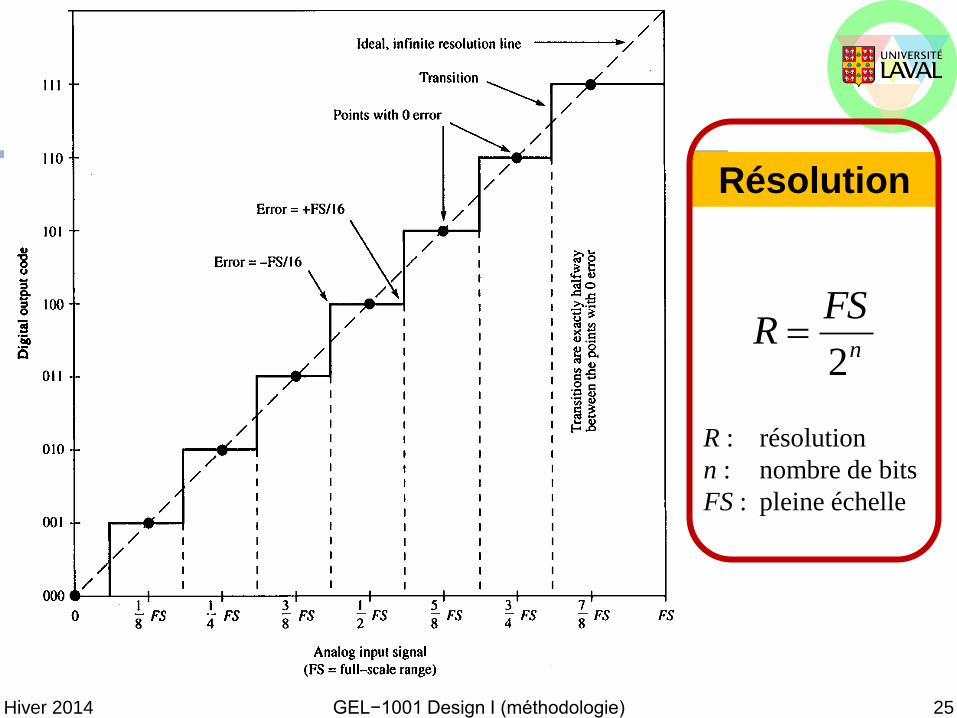
n
FSR
2
Résolution
R : résolution
n : nombre de bits
FS : pleine échelle
Hiver 2014 GEL−1001 Design I (méthodologie) 26
Outils logiciels
Configuration et programmation
Interface homme-machine
Human-Machine Interface (HMI)
Intégré aux DCS
Généralement fourni avec PLC/PAC
Logiciels indépendants disponibles
Archivage des données
Data Historian
Intégré aux DCS
Généralement fourni avec PLC/PAC
Logiciels indépendants disponibles
Hiver 2014 GEL−1001 Design I (méthodologie) 27

Interface homme-machine
Hiver 2014 GEL−1001 Design I (méthodologie) 28

Langages de programmation
Selon la norme IEC-6113-3 (International
Electrotechnical Commission) Function Block Diagram (FBD)
Ladder Diagram (LD)
Sequential Function Chart (SFC)
Structured Text (ST)
Instruction List (IL)
Typiquement Commande continue : FBD
Commande séquentielle : LD et SFC
Applications particulières : ST
Hiver 2014 GEL−1001 Design I (méthodologie) 29
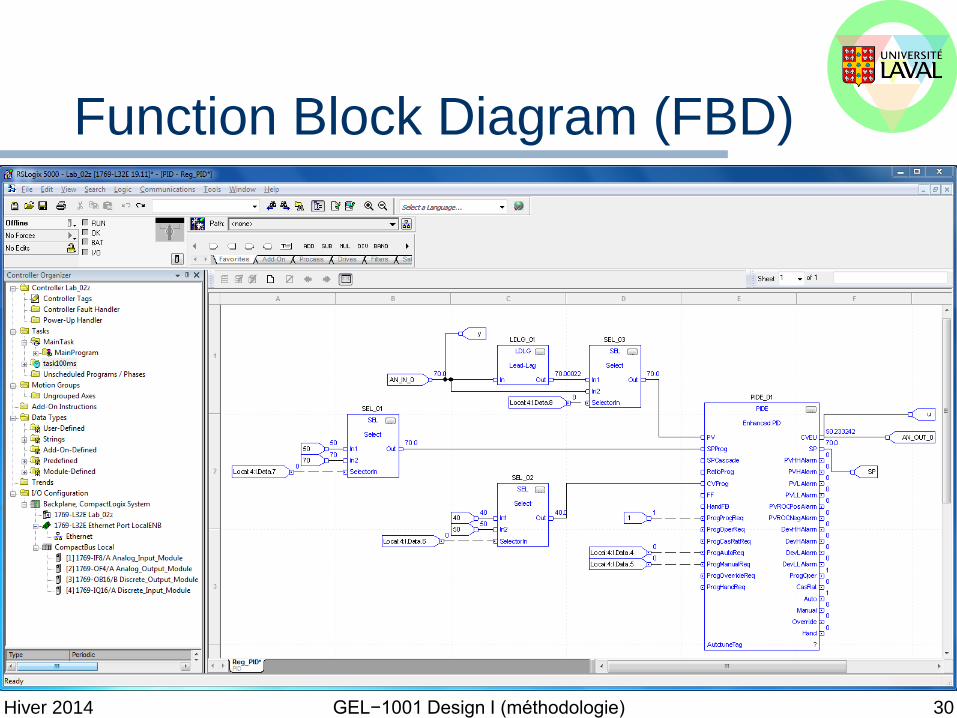
Function Block Diagram (FBD)
Hiver 2014 GEL−1001 Design I (méthodologie) 30
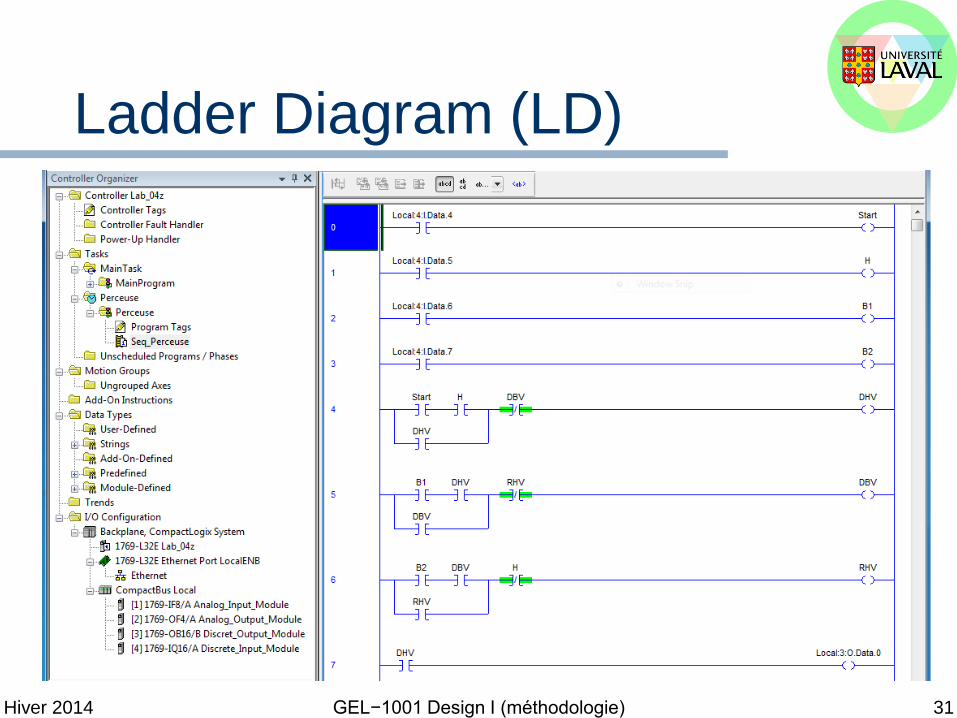
Ladder Diagram (LD)
Hiver 2014 GEL−1001 Design I (méthodologie) 31
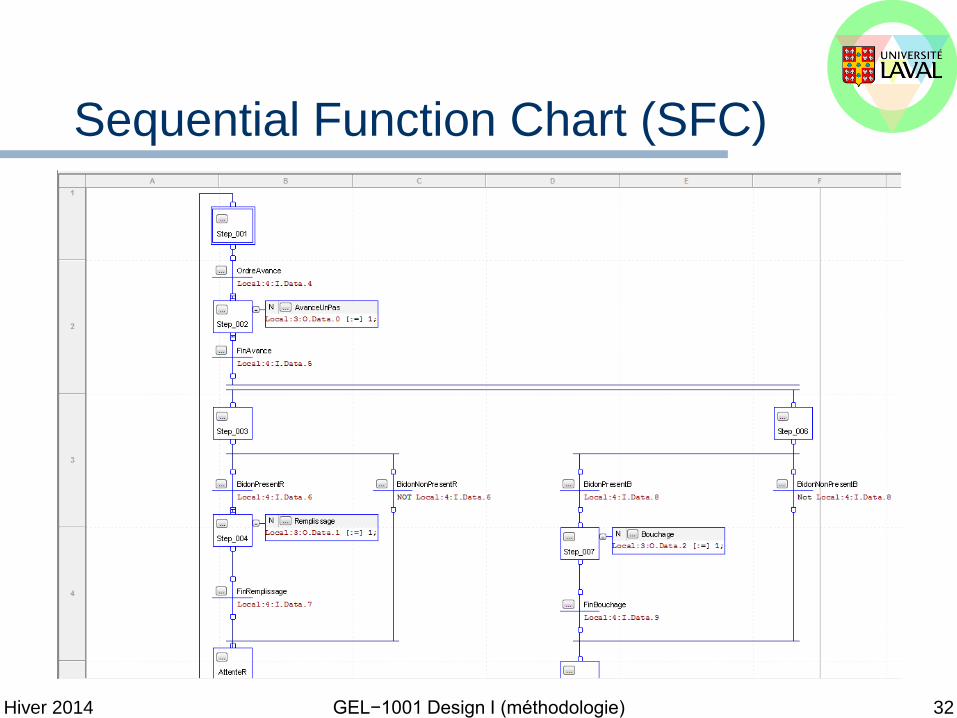
Sequential Function Chart (SFC)
Hiver 2014 GEL−1001 Design I (méthodologie) 32
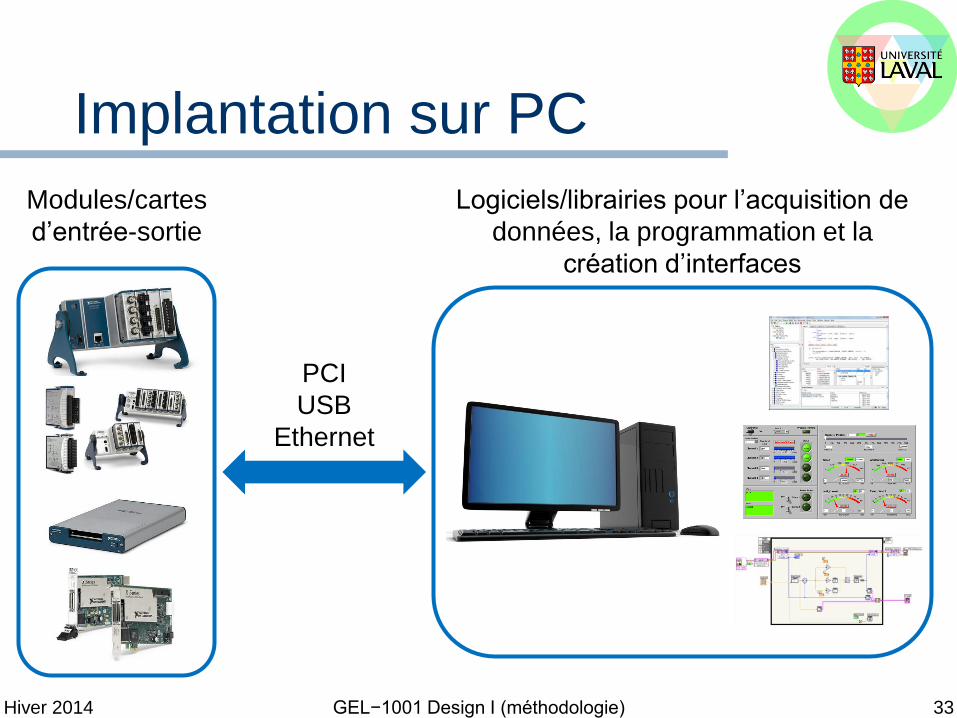
Implantation sur PC
Hiver 2014 GEL−1001 Design I (méthodologie) 33
Modules/cartes
d’entrée-sortie
PCI
USB
Ethernet
Logiciels/librairies pour l’acquisition de
données, la programmation et la
création d’interfaces

Montage de laboratoire
Hiver 2014 GEL−1001 Design I (méthodologie) 34
Matlab/Simulink
Cartes PCI
Advantech
Moteur DC
Conclusion
Commande automatique
Commande continue versus séquentielle
Systèmes de commande industrielle
Architecture, contrôleurs, langages de programmation
Implantation sur PC
Cours liés à la commande automatique
GEL-2005 Systèmes et commande linéaires
GEL-4100 Commande industrielle
GEL-4250 Commande multivariable
GEL-4251 Identification des systèmes
Hiver 2014 GEL−1001 Design I (méthodologie) 35
Recommended