5/11/2018 Geometria Maselor - slidepdf.com
http://slidepdf.com/reader/full/geometria-maselor 1/30
4. Geometria maselor
51
4. GEOMETRIA MASELOR
4.1. Centre de greutate (centre de masă)
4.1.1. Centrul de greutate şi de masă al unui sistem de puncte materiale
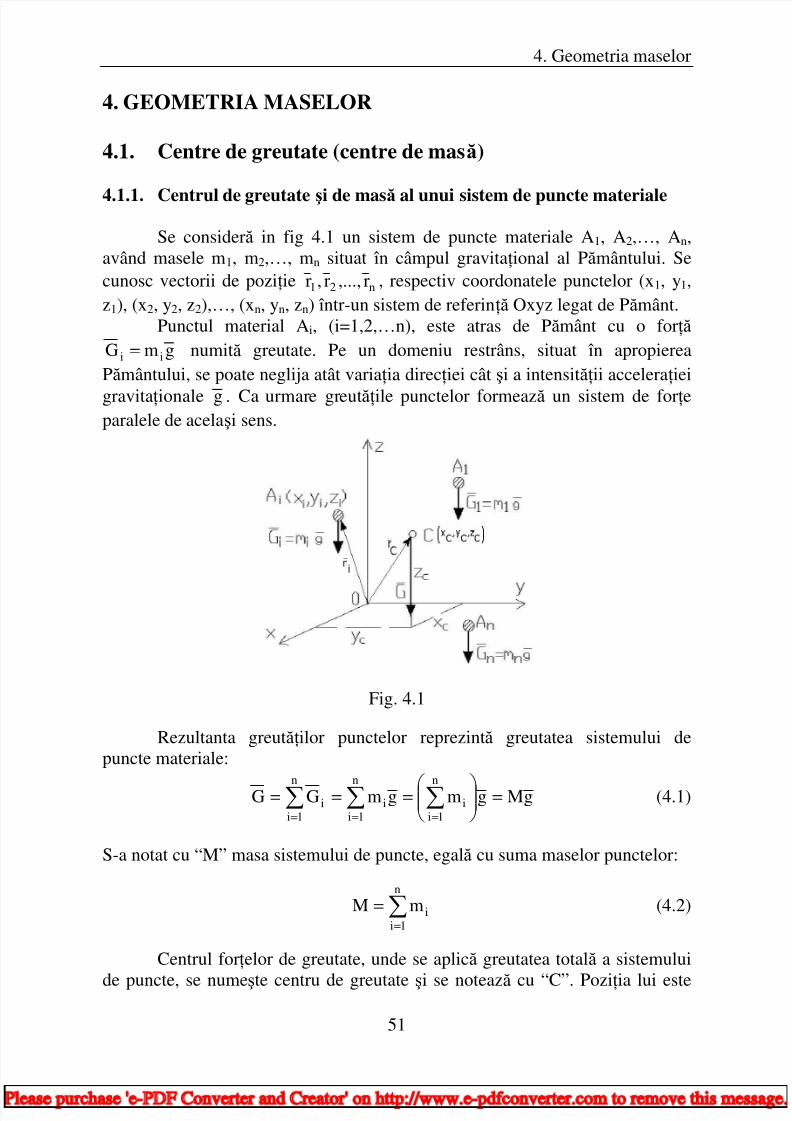
Se consideră in fig 4.1 un sistem de puncte materiale A1, A2,…, An,având masele m1, m2,…, mn situat în câmpul gravitaional al Pământului. Secunosc vectorii de poziie n21 r,...,r,r , respectiv coordonatele punctelor (x1, y1,z1), (x2, y2, z2),…, (xn, yn, zn) într-un sistem de referină Oxyz legat de Pământ.
Punctul material Ai, (i=1,2,…n), este atras de Pământ cu o foră gmG ii = numită greutate. Pe un domeniu restrâns, situat în apropierea
Pământului, se poate neglija atât variaia direciei cât şi a intensităii acceleraiei
gravitaionale g . Ca urmare greutăile punctelor formează un sistem de foreparalele de acelaşi sens.
Fig. 4.1
Rezultanta greutăilor punctelor reprezintă greutatea sistemului depuncte materiale:
gMgmgmGG n
1ii
n
1i
n
1iii =
=== ∑∑ ∑
== =
(4.1)
S-a notat cu “M” masa sistemului de puncte, egală cu suma maselor punctelor:
∑=
=n
1iimM (4.2)
Centrul forelor de greutate, unde se aplică greutatea totală a sistemului
de puncte, se numeşte centru de greutate şi se notează cu “C”. Poziia lui este
Please purchase 'e-PDF Converter and Creator' on http://www.e-pdfconverter.com to remove this message.

5/11/2018 Geometria Maselor - slidepdf.com
http://slidepdf.com/reader/full/geometria-maselor 2/30
Statica
52
data de relaiile pentru determinarea poziiei centrului forelor paralele în carescalarul iF al forei paralele iF se înlocuieşte cu greutatea iG a punctului iA :
M
rm
m
rm
gm
rgm
G
rG
ri
n
1i
i
n
1ii
i
n
1i
i
n
1ii
i
n
1i
i
n
1ii
i
n
1i
i
C
∑
∑
∑
∑
∑
∑
∑=
=
=
=
=
=
= ==== (4.3)
Se observă că în expresia finală a vectorului de poziie al centrului degreutate apar numai masele punctelor şi din acest motiv centrul de greutate semai numeşte centrul maselor sau centru de masă . Coordonatele centrului degreutate (de masă) în reperul Oxyz vor fi :
∑
∑
=
==n
1ii
i
n
1ii
C
m
xmx ;
∑
∑
=
==n
1ii
i
n
1ii
C
m
ymy ;
∑
∑
=
==n
1ii
i
n
1ii
C
m
zmz (4.4)
Expresiile i
n
1iixm∑
=
, i
n
1ii ym∑
=
, i
n
1iizm∑
=
de la numărătorii relaiilor (4.4)
se numesc momente statice ale sistemului de puncte faă de planele yOz, zOx,
xOy, iar expresia i1i i rm∑= este momentul static al sistemului faă de punctul O.Aceste mărimi caracterizează distribuia maselor unui sistem de puncte
materiale în reperul Oxyz.Din relatiile (4.3) si (4.4) rezultă egalităile:
Ci1i
i rMrm =∑=
; Ci1i
i Mxxm =∑=
; Ci1i
i Myym =∑=
; Ci1i
i Mzzm =∑=
(4.5)
care exprimă teorema momentelor statice conform căreia: momentul static al
unui sistem de puncte materiale în raport cu un pol este egal cu masa sistemuluiînmultit ă cu vectorul de pozi ie al centrului de greutate în raport cu acel pol,
respectiv momentul static al unui sistem de puncte materiale în raport cu un
plan este egal cu masa sistemului înmul it ă cu distan a de la centrul să u de
greutate la acel plan.
4.1.2. Centrul de greutate al unui corp oarecare
Pentru a putea aplica relaiile stabilite în cazul unui sistem de punctemateriale vom considera corpul (C) din figura 4.2 divizat într-un număr de “n”
volume iV∆ care au masa im∆ şi vectorii de poziie ai centrelor geometrice ir .
Please purchase 'e-PDF Converter and Creator' on http://www.e-pdfconverter.com to remove this message.

5/11/2018 Geometria Maselor - slidepdf.com
http://slidepdf.com/reader/full/geometria-maselor 3/30
4. Geometria maselor
53
Fig. 4.2
Conform formulei (4.3) centrul de greutate va avea, aproximativ,vectorul de poziie:
∑
∑
=
=
∆
∆
=n
1ii
i
n
1ii
C
m
mr
r (4.6)
Trecând la limită când ∞→n , atunci sumele din expresia (4.6) se
transforma în integrale, masele im∆ , devin mase elementare “dm” iar vectoriide poziie ir devin r . Relaiile pentru calculul poziiei centrului de greutate al
unui corp oarecare vor fi:
∫
∫ =
)C(
)C(C
dm
dmr
r ;∫
∫ =
)C(
)C(C
dm
xdm
x ;∫
∫ =
)C(
)C(C
dm
ydm
x ;∫
∫ =
)C(
)C(C
dm
zdm
x (4.7)
În relaiile (4.7) r , x, y, z, sunt vectorul de poziie, respectivcoordonatele centrului de greutate ale masei elementare “dm”.
Expresiile ∫ )C(
dmr ; ∫ )C(
xdm; ∫ )C(
ydm; ∫ )C(
zdm reprezintă momentele statice
ale corpului în raport cu polul O, respectiv cu planele yOz, zOx, xOy. Dinrelaiile (4.7) se deduce teorema momentelor statice în cazul unui corp:
C
)C(
rMdmr =∫ ; C
)C(
Mxxdm =∫ ; C
)C(
Myydm =∫ ; C
)C(
Mzzdm =∫ (4.8)
Please purchase 'e-PDF Converter and Creator' on http://www.e-pdfconverter.com to remove this message.
5/11/2018 Geometria Maselor - slidepdf.com
http://slidepdf.com/reader/full/geometria-maselor 4/30
Statica
54
care are un enun analog cu cel al unui sistem de puncte materiale.
4.1.3. Centrul de greutate al unui corp omogen
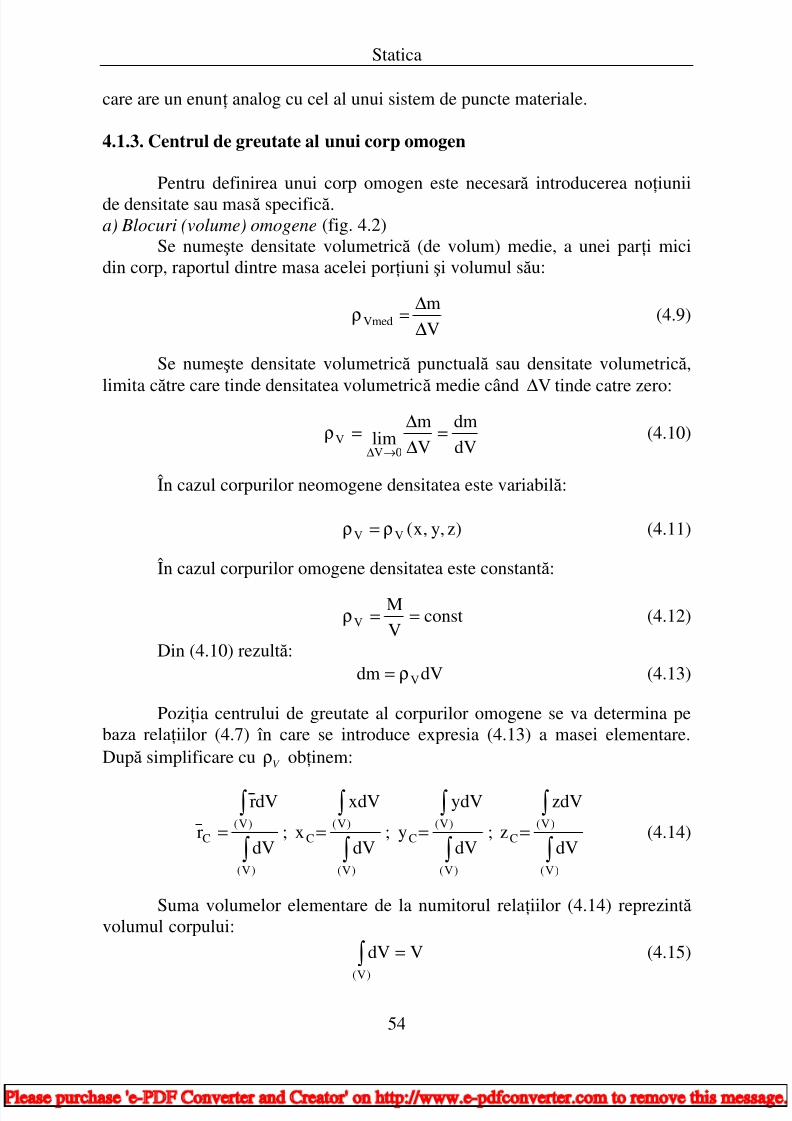
Pentru definirea unui corp omogen este necesară introducerea noiuniide densitate sau masă specifică.a) Blocuri (volume) omogene (fig. 4.2)
Se numeşte densitate volumetrică (de volum) medie, a unei pari micidin corp, raportul dintre masa acelei poriuni şi volumul său:
V
mVmed
∆
∆=ρ (4.9)
Se numeşte densitate volumetrică punctuală sau densitate volumetrică,
limita către care tinde densitatea volumetrică medie când V∆ tinde catre zero:
dV
dm
V
mlim
0VV =
∆
∆=ρ
→∆
(4.10)
În cazul corpurilor neomogene densitatea este variabilă:
)z,y,x(VV ρ=ρ (4.11)
În cazul corpurilor omogene densitatea este constantă:
constV
MV ==ρ (4.12)
Din (4.10) rezultă:dVdm Vρ= (4.13)
Poziia centrului de greutate al corpurilor omogene se va determina pebaza relaiilor (4.7) în care se introduce expresia (4.13) a masei elementare.După simplificare cu V ρ obinem:
∫
∫ =
)V(
)V(C
dV
dVr
r ;∫
∫ =
)V(
)V(C
dV
xdV
x ;∫
∫ =
)V(
)V(C
dV
ydV
y ;∫
∫ =
)V(
)V(C
dV
zdV
z (4.14)
Suma volumelor elementare de la numitorul relaiilor (4.14) reprezintă volumul corpului:
VdV
)V(
=∫ (4.15)
Please purchase 'e-PDF Converter and Creator' on http://www.e-pdfconverter.com to remove this message.
5/11/2018 Geometria Maselor - slidepdf.com
http://slidepdf.com/reader/full/geometria-maselor 5/30
4. Geometria maselor
55
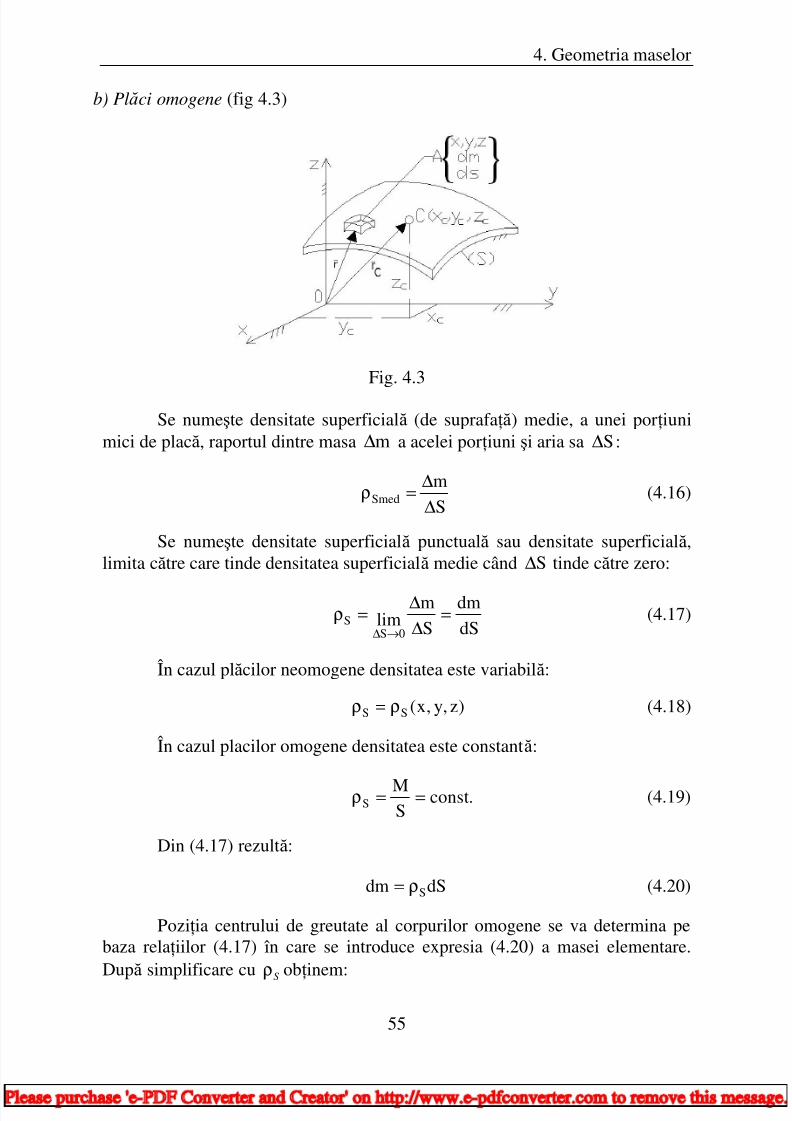
b) Plă ci omogene (fig 4.3)
Fig. 4.3
Se numeşte densitate superficială (de suprafaă) medie, a unei poriunimici de placă, raportul dintre masa m∆ a acelei poriuni şi aria sa S∆ :
S
mSmed
∆
∆=ρ (4.16)
Se numeşte densitate superficială punctuală sau densitate superficială,limita către care tinde densitatea superficială medie când S∆ tinde către zero:
dS
dm
S
mlim
0SS =
∆
∆=ρ
→∆
(4.17)
În cazul plăcilor neomogene densitatea este variabilă:
)z,y,x(SS ρ=ρ (4.18)
În cazul placilor omogene densitatea este constantă:
.constSM
S ==ρ (4.19)
Din (4.17) rezultă:
dSdm Sρ= (4.20)
Poziia centrului de greutate al corpurilor omogene se va determina pebaza relaiilor (4.17) în care se introduce expresia (4.20) a masei elementare.Dup
ăsimplificare cu
Sρob
inem:
Please purchase 'e-PDF Converter and Creator' on http://www.e-pdfconverter.com to remove this message.
5/11/2018 Geometria Maselor - slidepdf.com
http://slidepdf.com/reader/full/geometria-maselor 6/30
Statica
56
∫
∫ =
)S(
)S(C
dS
dSr
r ;∫
∫ =
)S(
)S(C
dS
xdS
x ;∫
∫ =
)S(
)S(C
dS
ydS
y ;∫
∫ =
)S(
)S(C
dS
zdS
z (4.21)
Suma ariilor elementare de la numitorul relaiilor (4.21) reprezintă ariasuprafeei plăcii:
SdS)S(
=∫ (4.22)
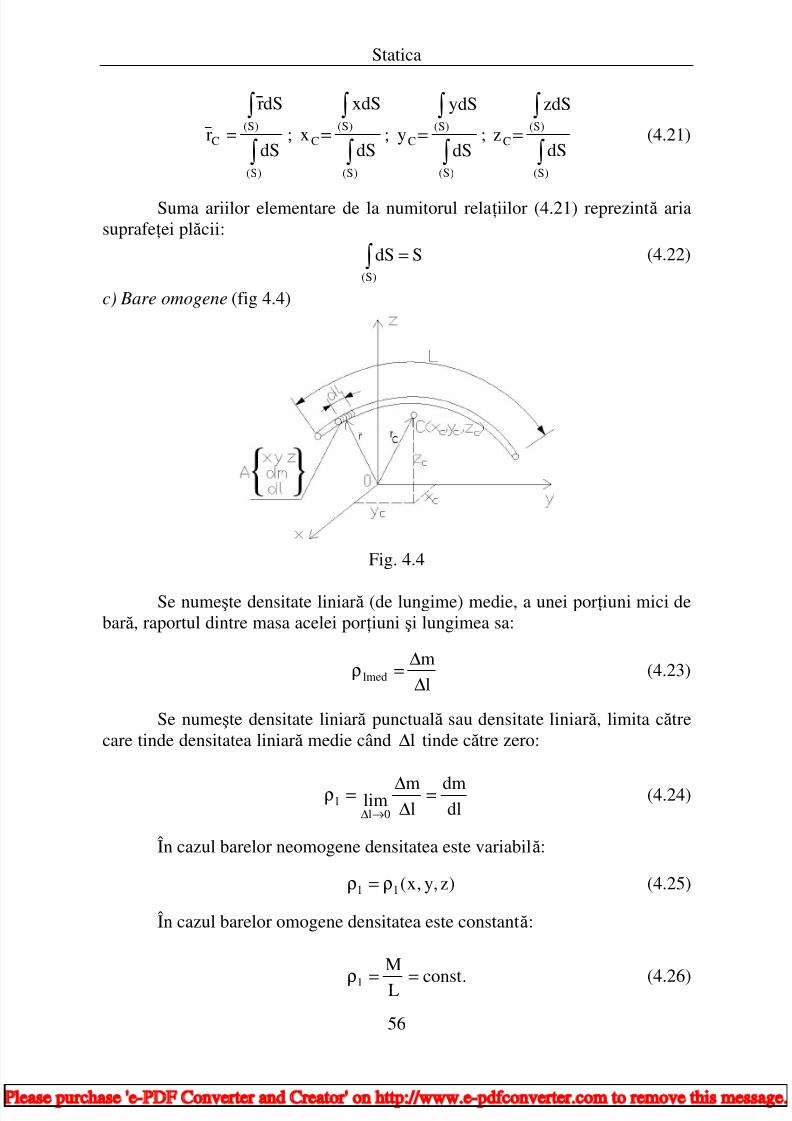
c) Bare omogene (fig 4.4)
Fig. 4.4
Se numeşte densitate liniară (de lungime) medie, a unei poriuni mici debară, raportul dintre masa acelei poriuni şi lungimea sa:
l
mlmed
∆
∆=ρ (4.23)
Se numeşte densitate liniară punctuală sau densitate liniară, limita cătrecare tinde densitatea liniară medie când l∆ tinde către zero:
dldm
lmlim
0ll =
∆∆=ρ
→∆
(4.24)
În cazul barelor neomogene densitatea este variabilă:
)z,y,x(ll ρ=ρ (4.25)
În cazul barelor omogene densitatea este constantă:
.constL
Ml ==ρ (4.26)
Please purchase 'e-PDF Converter and Creator' on http://www.e-pdfconverter.com to remove this message.
5/11/2018 Geometria Maselor - slidepdf.com
http://slidepdf.com/reader/full/geometria-maselor 7/30
4. Geometria maselor
57
Din (4.24) rezultă:dldm lρ= (4.27)
Poziia centrului de greutate al corpurilor omogene se va determina pe
baza relatiilor (4.7) în care se introduce expresia (4.27) a masei elementare.Dupa simplificare cu lρ obinem:
∫
∫ =
)L(
)L(C
dl
dlr
r ;∫
∫ =
)L(
)L(C
dl
xdl
x ;∫
∫ =
)L(
)L(C
dl
ydl
y ;∫
∫ =
)L(
)L(C
dl
zdl
z (4.28)
Suma lungimilor elementare de la numitorul relaiilor (4.28) reprezintă
lungimea barei:Ldl
)L(
=∫ (4.29)
Observa ii: a) Centrul de greutate păstreaza proprietăile centrului forelor paralele;b) Dacă un corp omogen admite un plan de simetrie, o axă de simetrie
sau un centru de simetrie atunci centrul de greutate al corpului se va afla în acelplan, pe acea axă sau în acel centru.
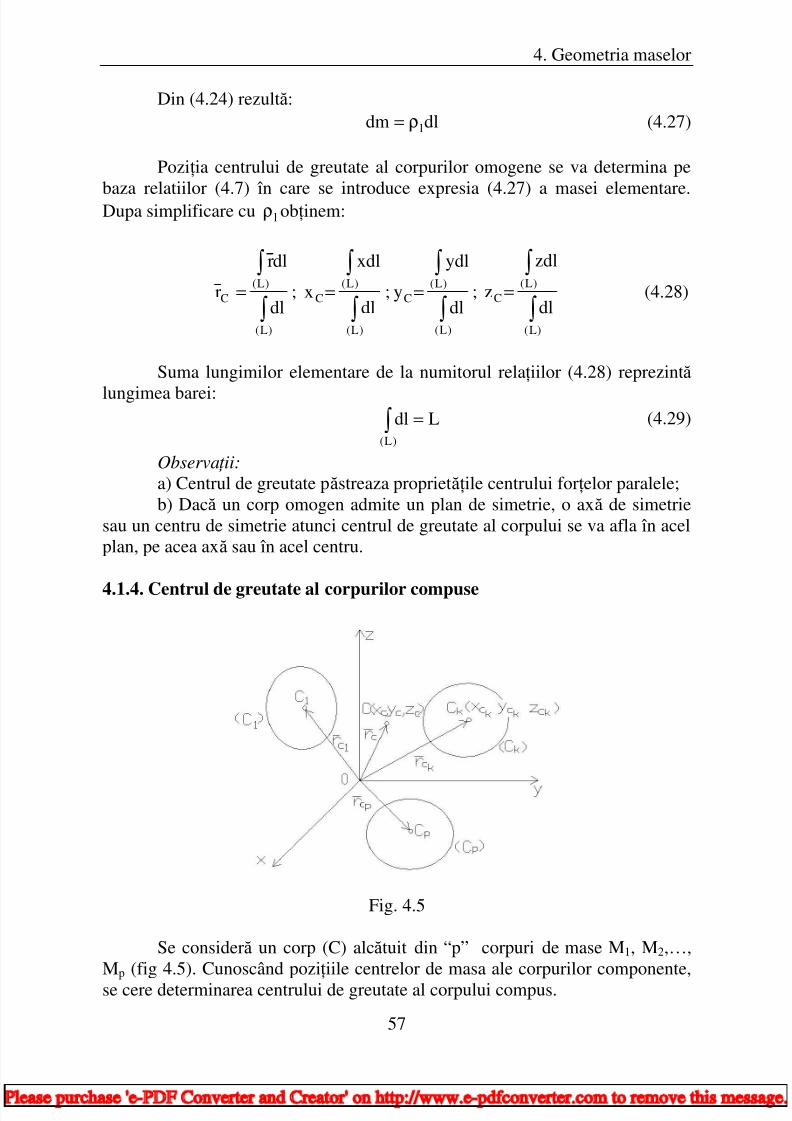
4.1.4. Centrul de greutate al corpurilor compuse
Fig. 4.5
Se consideră un corp (C) alcătuit din “p” corpuri de mase M1, M2,…,M
p(fig 4.5). Cunoscând poziiile centrelor de masa ale corpurilor componente,
se cere determinarea centrului de greutate al corpului compus.
Please purchase 'e-PDF Converter and Creator' on http://www.e-pdfconverter.com to remove this message.
5/11/2018 Geometria Maselor - slidepdf.com
http://slidepdf.com/reader/full/geometria-maselor 8/30
Statica
58
Vectorul de poziie al centrului de greutate al corpului (C) este:
∑
∑
∑ ∫
∑ ∫
∫
∫
=
=
=
====
p
1kk
k
p
1kC
p
1k )C(
p
1k )C(
)C(
)C(C
M
Mr
dm
dmr
dm
dmr
rk
k
k (4.30)
S-a inut seama că:
kC)C(
Mrdmrk
k
=∫ ; k)C(
Mdmk
=∫ (4.31)
În cazul corpurilor compuse omogene masele kM vor fi, înlocuite,
respectiv cu volumelek
V , ariilek
S sau lungimilek
L .Astfel pentru:- blocuri (volume) omogene,
∑
∑
=
==p
1kk
p
1kkC
C
V
Vr
rk
;
∑
∑
=
==p
1kk
p
1kkC
C
V
Vx
xk
;
∑
∑
=
==p
1kk
p
1kkC
C
V
Vy
yk
;
∑
∑
=
==p
1kk
p
1kkC
C
V
Vz
zk
(4.32)
- plăci omogene,
∑
∑
=
==p
1kk
p
1kkC
C
S
Sr
rk
;
∑
∑
=
==p
1kk
p
1kkC
C
S
Sx
xk
;
∑
∑
=
==p
1kk
p
1kkC
C
S
Sy
yk
;
∑
∑
=
==p
1kk
p
1kkC
C
S
Sz
zk
(4.33)
- bare omogene,
∑
∑
=
== p
1kk
p
1k
kC
C
L
Lr
r
k
;∑
∑
=
== p
1kk
p
1k
kC
C
L
Lx
x
k
;∑
∑
=
== p
1kk
p
1k
kC
C
L
Ly
y
k
;∑
∑
=
== p
1kk
p
1k
kC
C
L
Lz
z
k
(4.34)
Observa ie: Dacă un corp (C) poate fi considerat ca provenind dintr-un corp(C1) din care a fost eliminat un corp (C2) si dacă se cunosc masele M1 si M2 şicentrele de masa C1 si C2 ale celor două corpuri, atunci poziia centrului degreutate (C) se determină cu relaia:
21
2C1CC
MM
MrMrr 21
−
−= (4.35)
Please purchase 'e-PDF Converter and Creator' on http://www.e-pdfconverter.com to remove this message.
5/11/2018 Geometria Maselor - slidepdf.com
http://slidepdf.com/reader/full/geometria-maselor 9/30
4. Geometria maselor
59
În cazul unui corp omogen masele se înlocuiesc corespunzător cuvolume, arii sau lungimi.
4.1.5. Teoremele lui Guldin-Pappus [((Guldin, Paul, 1577-1643), (Pappus din Alexandria, secolul 4 d.H.)]
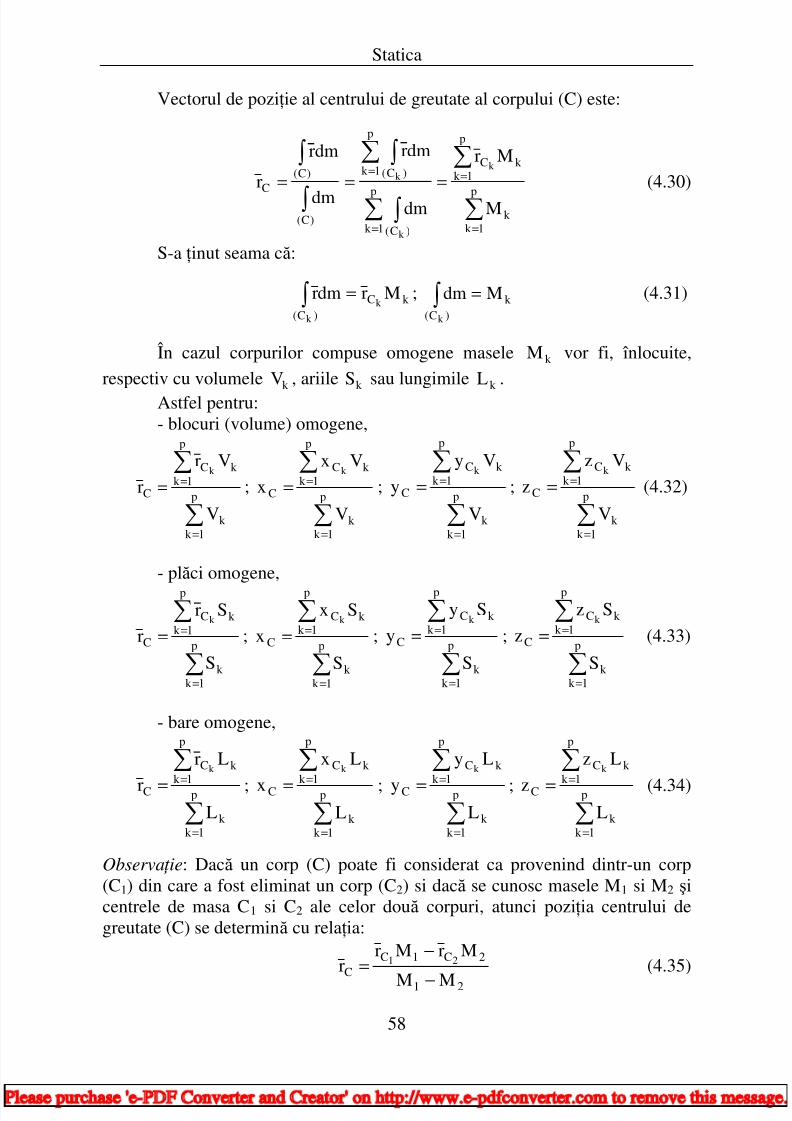
Teorema I-a: “ Aria suprafe ei generate prin rotirea unui arc de curbă
plană în jurul unei axe din planul curbei, arcul fiind situat în întregime de
aceea şi parte a axei, este egală cu produsul dintre lungimea arcului de curbă şi
lungimea arcului de cerc descris de centrul de masă al arcului de curbă ”.
Fig. 4.6
Pentru demonstraie vom considera în figura 4.6 arcul de curba “AB” delungime “L”, situat în planul xOy de acceaşi parte a axei Oy, având centrul degreutate la distana “xc” de axa Oy şi care se roteşte complet în jurul axei Oy.Va lua naştere o suprafaă de revoluie a cărei arie urmează să o calculăm.
Aria elementara “dS” a suprafeei laterale a trunchiului de con elementarrezultat prin rotirea completă a unui arc de curba elementar “dl” este:
dlx2dS π= , (4.36)
unde “x” reprezintă abscisa centrului de greutate al arcului elementar delungime “dl”.Suprafaa de revoluie generată prin rotirea completă a întregului arc de
curba “AB” va avea aria:
∫ ∫ π==)S(
B
A
dlx2dSS (4.37)
Conform (4.28):
LxdlxB
A
C∫ = (4.38)
Please purchase 'e-PDF Converter and Creator' on http://www.e-pdfconverter.com to remove this message.
5/11/2018 Geometria Maselor - slidepdf.com
http://slidepdf.com/reader/full/geometria-maselor 10/30
Statica
60
Substituind (4.38) în (4.37) obinem ce am dorit să demonstrăm:
Lx2S Cπ= (4.39)
Dacă rotaia se face numai cu un unghi π≤α 2 , atunci:
LxS Cα= (4.40)
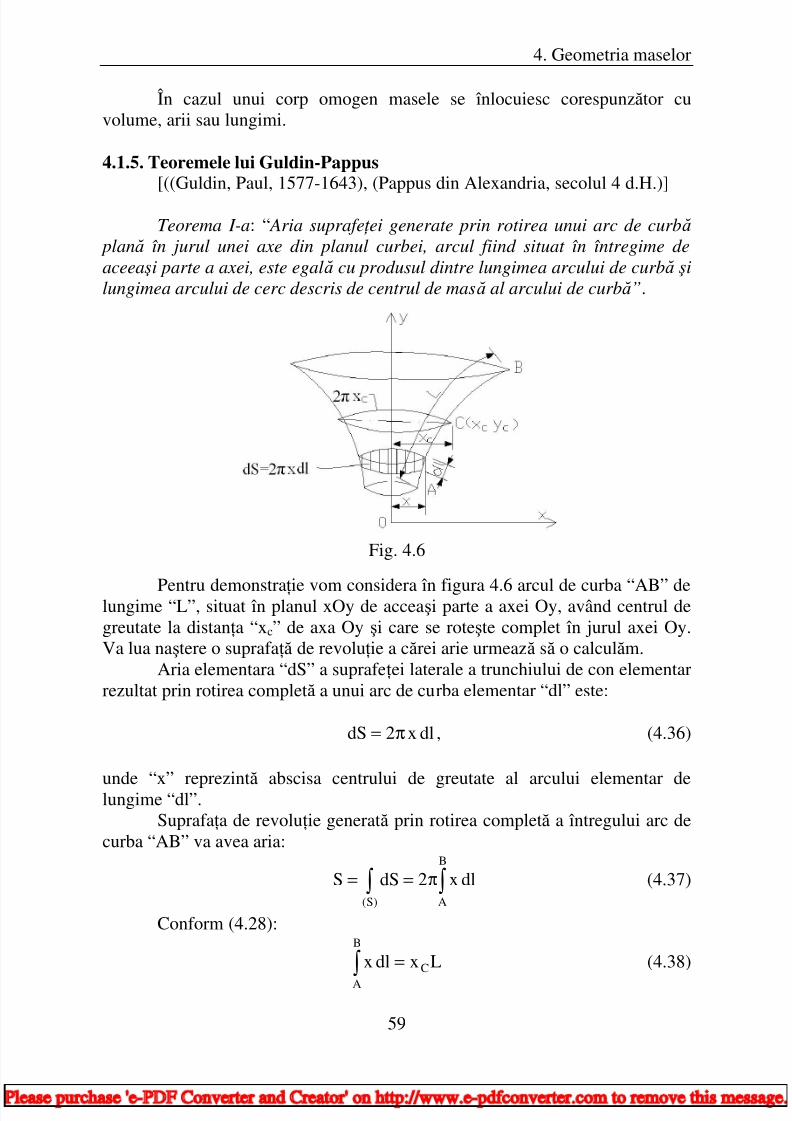
Teorema a II-a: “Volumul corpului de revolu ie generat prin rotirea
unei suprafe e plane omogene închise în jurul unei axe planul suprafe ei,
suprafa a fiind situat ă în întregime de accea şi parte a axei, este egal cu
produsul dintre aria suprafe ei şi lungimea arcului de cerc descris de centrul de
greutate al suprafe ei”.
Fig. 4.7
Pentru demonstraie vom considera, în figura 4.7, o suprafaă plană omogenă închisă de arie “S”, situată în planul xOy de acceaşi parte a axei Oy,având centrul de greutate la distanta “xC” de axa Oy şi care se roteşte complet în jurul axei Oy. Va lua naştere un corp omogen de revoluie al carui volum
urmeaza să îl calculăm.Volumul “dV” al torului elementare rezultat prin rotirea completă a unei
suprafee elementare “dS” este:
dSx2dV π= (4.41)
unde “x” reprezintă abscisa centrului de greutate al suprafeei elementare de arie“dS”.
Volumul corpului de revoluie generat prin rotirea completă a întregii
suprafee plane va fi:
Please purchase 'e-PDF Converter and Creator' on http://www.e-pdfconverter.com to remove this message.

5/11/2018 Geometria Maselor - slidepdf.com
http://slidepdf.com/reader/full/geometria-maselor 11/30
4. Geometria maselor
61
∫ ∫ π==)V( )S(
xdS2dVV (4.42)
Conform (4.21):
SxxdS C)S(
=∫ (4.43)
Substituind (4.43) în (4.42) obinem ce am dorit să demonstrăm:
Sx2V Cπ= (4.44)
Daca rotaia se face numai cu un unghi π≤β 2 , atunci:
SxV Cβ= (4.45)
4.2. Momente de inerie
4.2.1. Momente de inerie mecanice. Momente de inerie geometrice. Rază
de giraie
Momentele de inerie mecanice sunt m
ărimi care caracterizeaz
ă
răspândirea maselor unui sistem material în raport cu elementele unui sistem dereferină dat. Cu ajutorul lor se exprimă ineria unui corp aflat în mişcare derotaie.
Fig. 4.8
Please purchase 'e-PDF Converter and Creator' on http://www.e-pdfconverter.com to remove this message.
5/11/2018 Geometria Maselor - slidepdf.com
http://slidepdf.com/reader/full/geometria-maselor 12/30
Statica
62
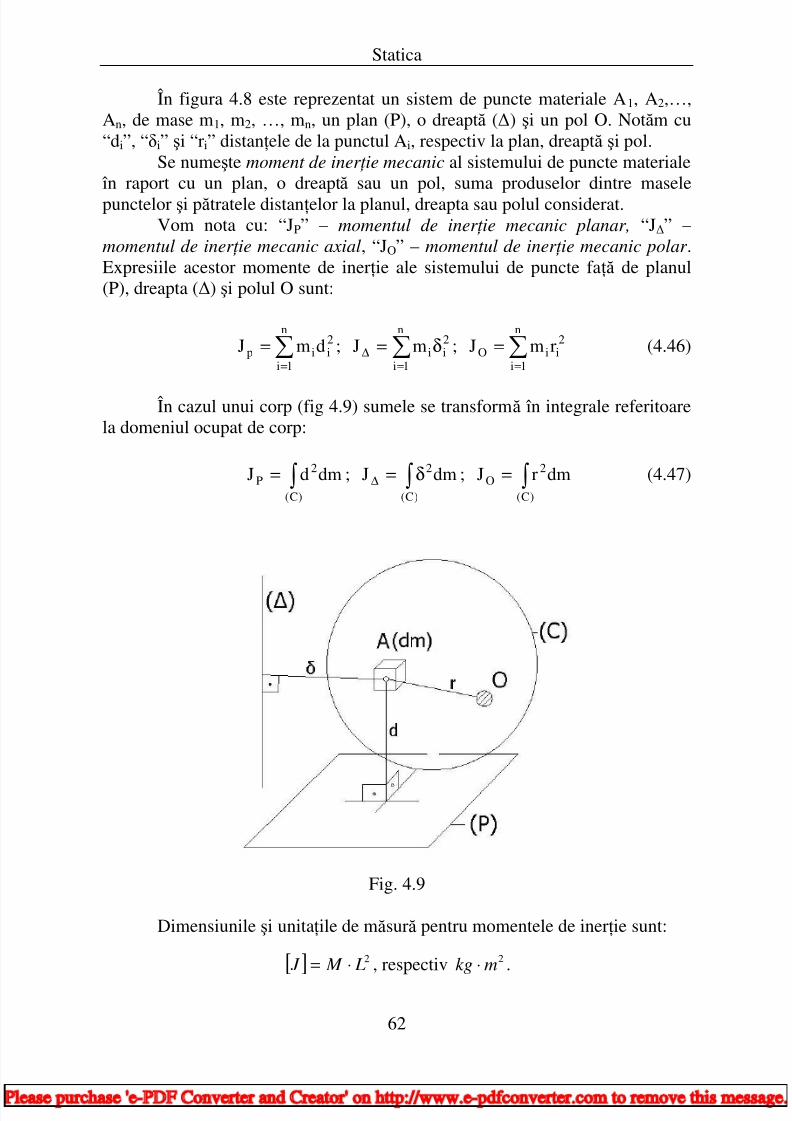
În figura 4.8 este reprezentat un sistem de puncte materiale A1, A2,…,An, de mase m1, m2, …, mn, un plan (P), o dreaptă (∆) şi un pol O. Notăm cu“di”, “δi” şi “ri” distanele de la punctul Ai, respectiv la plan, dreaptă şi pol.
Se numeşte moment de iner ie mecanic al sistemului de puncte materiale în raport cu un plan, o dreaptă sau un pol, suma produselor dintre maselepunctelor şi pătratele distanelor la planul, dreapta sau polul considerat.
Vom nota cu: “JP” – momentul de iner ie mecanic planar, “J∆” –
momentul de iner ie mecanic axial, “JO” – momentul de iner ie mecanic polar .Expresiile acestor momente de inerie ale sistemului de puncte faă de planul(P), dreapta (∆) şi polul O sunt:
2i
n
1iip dmJ ∑
=
= ; 2i
n
1iimJ δ= ∑
=∆ ; 2
i
n
1iiO rmJ ∑
=
= (4.46)
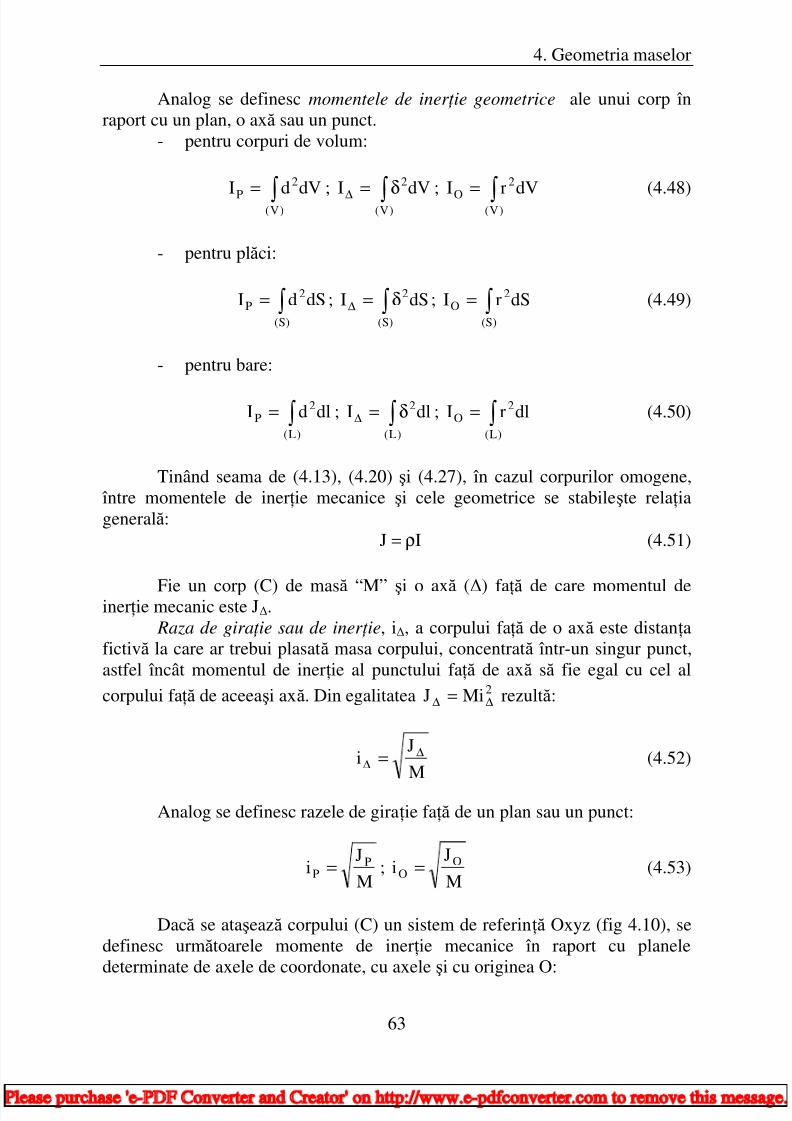
În cazul unui corp (fig 4.9) sumele se transformă în integrale referitoarela domeniul ocupat de corp:
dmdJ)C(
2P ∫ = ; ∫ δ=∆
)C(
2dmJ ; dmrJ)C(
2O ∫ = (4.47)
Fig. 4.9
Dimensiunile şi unitaile de măsură pentru momentele de inerie sunt:
[ ] 2 L M J ⋅= , respectiv 2mkg ⋅ .
Please purchase 'e-PDF Converter and Creator' on http://www.e-pdfconverter.com to remove this message.
5/11/2018 Geometria Maselor - slidepdf.com
http://slidepdf.com/reader/full/geometria-maselor 13/30
4. Geometria maselor
63
Analog se definesc momentele de iner ie geometrice ale unui corp înraport cu un plan, o axă sau un punct.
- pentru corpuri de volum:
dVdI )V(
2
P ∫ = ; ∫ δ=∆)V(
2
dVI ; dVrI )V(
2
O ∫ = (4.48)
- pentru plăci:
dSdI)S(
2P ∫ = ; ∫ δ=∆
)S(
2dSI ; dSrI)S(
2O ∫ = (4.49)
- pentru bare:
dldI)L(
2P ∫ = ; ∫ δ=∆
)L(
2dlI ; dlrI)L(
2O ∫ = (4.50)
Tinând seama de (4.13), (4.20) şi (4.27), în cazul corpurilor omogene, între momentele de inerie mecanice şi cele geometrice se stabileşte relaiagenerală:
IJ ρ= (4.51)
Fie un corp (C) de masă “M” şi o axă (∆) faă de care momentul deinerie mecanic este J∆. Raza de gira ie sau de iner ie, i∆, a corpului faă de o axă este distana
fictivă la care ar trebui plasată masa corpului, concentrată într-un singur punct,astfel încât momentul de inerie al punctului faă de axă să fie egal cu cel al
corpului faă de aceeaşi axă. Din egalitatea 2MiJ ∆∆ = rezultă:
M
Ji ∆
∆ = (4.52)
Analog se definesc razele de giraie faă de un plan sau un punct:
M
Ji P
P = ;M
Ji O
O = (4.53)
Dacă se ataşează corpului (C) un sistem de referină Oxyz (fig 4.10), sedefinesc următoarele momente de inerie mecanice în raport cu planeledeterminate de axele de coordonate, cu axele şi cu originea O:
Please purchase 'e-PDF Converter and Creator' on http://www.e-pdfconverter.com to remove this message.

5/11/2018 Geometria Maselor - slidepdf.com
http://slidepdf.com/reader/full/geometria-maselor 14/30
Statica
64
Fig 4.10
- momente de inertie mecanice planare,
∫ =)C(
2yOz dmxJ ; ∫ =
)C(
2zOx dmyJ ; ∫ =
)C(
2xOy dmZJ (4.54)
- momente de iner ie mecanice axiale,
dmzyJ
)C(
22x ∫ += ; dmxzJ
)C(
22y ∫ += ; dmyxJ
)C(
22z ∫ += (4.55)
- moment de iner ie mecanic polar ,
∫ ++=)C(
222O dmzyxJ (4.56)
- momente de iner ie mecanice centrifugale,
dmyzJ yz ∫ = ; dmzxJ zx ∫ = ; dm xy J xy
∫ = (4.57)
Momentele de inerie planare, axiale şi polare sunt mărimi scalarepozitive sau cel puin nule, pe când momentele de inerie centrifugale pot fipozitive, negative sau nule.
Între momentele de inerie mecanice date de relaiile (4.54) – (4.57) suntevidente relaiile:
- în spaiu
xOyxOzyOzO JJJJ ++= (4.58)
Please purchase 'e-PDF Converter and Creator' on http://www.e-pdfconverter.com to remove this message.
5/11/2018 Geometria Maselor - slidepdf.com
http://slidepdf.com/reader/full/geometria-maselor 15/30
4. Geometria maselor
65
zxOyyzOxxyOzO JJJJJJJ +=+++= (4.59)
( )zyxO
JJJ2
1J ++= (4.60)
xOyzOxx JJJ += ; yOzxOyy JJJ += ; yOzzOyz JJJ += (4.61)
zyx JJJ ≥+ ; xzy JJJ ≥+ ; yxz JJJ ≥+ (4.62)
- în plan
yxzO JJJJ +== (4.63)
4.2.2. Variatia momentelor de inertie mecanice in raport cu axe paralele.
Teorema lui Steiner
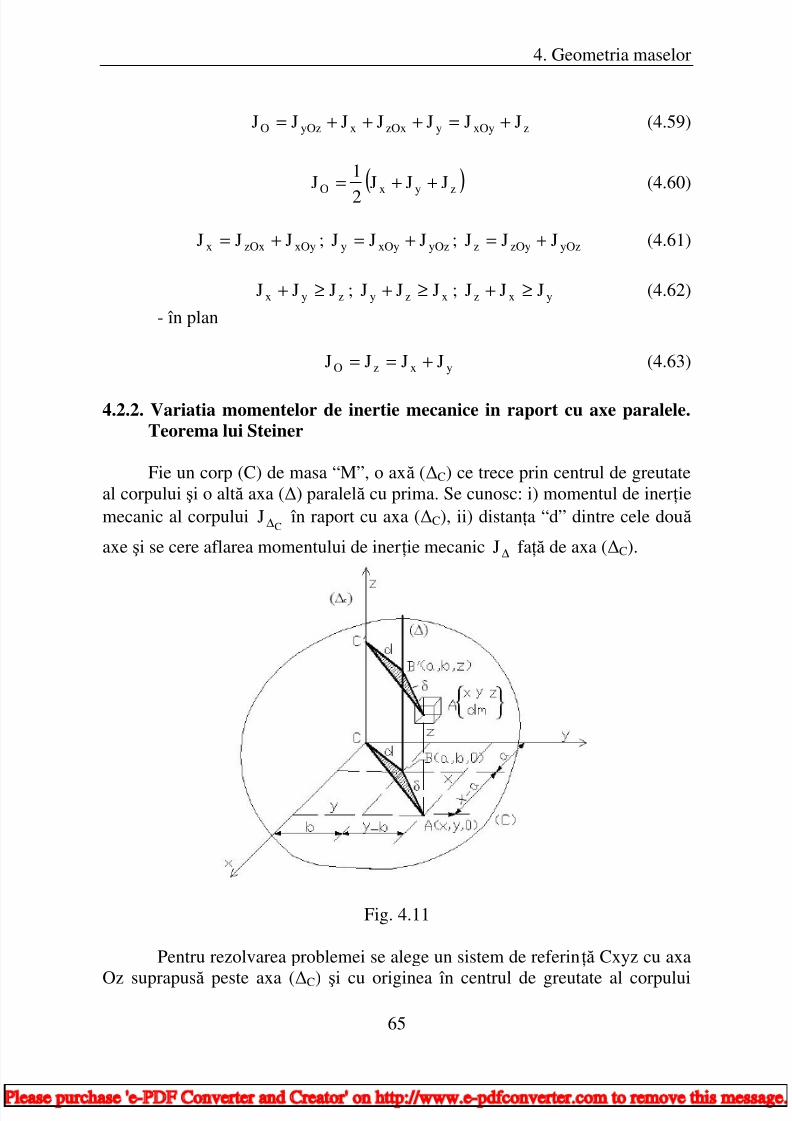
Fie un corp (C) de masa “M”, o axă (∆C) ce trece prin centrul de greutateal corpului şi o altă axa (∆) paralelă cu prima. Se cunosc: i) momentul de ineriemecanic al corpului
CJ ∆ în raport cu axa (∆C), ii) distana “d” dintre cele două
axe şi se cere aflarea momentului de inerie mecanic ∆J faă de axa (∆C).
Fig. 4.11
Pentru rezolvarea problemei se alege un sistem de referină Cxyz cu axa
Oz suprapusă peste axa (∆C) şi cu originea în centrul de greutate al corpului
Please purchase 'e-PDF Converter and Creator' on http://www.e-pdfconverter.com to remove this message.

5/11/2018 Geometria Maselor - slidepdf.com
http://slidepdf.com/reader/full/geometria-maselor 16/30
Statica
66
(fig. 4.11). Axa (∆) îneapă planul xCy în punctul “B” de coordoate xB=a, yB=b.Se poate scrie relaia:
222 dba =+ (4.64)
Prin definiie:
( )dmyxJJ)C(
22zC ∫ +==∆ (4.65)
( ) ( ) ( ) ( )[ ]∫ ∫ ∫ ∫ =−+−=′=′=δ=∆
)C( )C(
222
)C(
2
)C(
2 dmbyaxdmBAdmBAdmJ
∫ ∫ ∫ ∫ −−+++=)C( )C( )C(
22
)C(
22 dmyb2dmxa2dmbadmyx
(4.66)
Deoarece centrul de greutate se află în originea sistemului de referină (xC=0, yC=0, zC=0), aplicând teorema momentelor statice, obinem:
0==∫ C
)C (
Mx xdm ; 0==∫ C
)C (
My ydm (4.67)
Substituind (4.64), (4.65) şi (4.67) în (4.66) şi inând seama că
∫ =)C(
Mdm , rezultă relatia:
2MdJJC
+= ∆∆ (4.68)
care exprimă teorema lui Steiner (Steiner, Jakob, 1796-1863) cu următorulenun: “ Momentul de iner ie al unui corp (sistem material) fa ă de o axa (∆)
este egal cu momentul fa ă de axa paralelă (∆C) care trece prin centrul degreutate al corpului plus masa înmul it ă cu pă tratul distan ei dintre cele două
axe”.Din teorema lui Steiner (4.68) decurg câteva proprietăi ale variaiei
momentelor de inerie în raport cu axele paralele:1. Pentru o direcie dată, momentul de inerie minim se obine faă de
axa care trece prin centrul de greutate al corpului (sau sistemului material);2. Locul geometric al axelor paralele cu o direcie dată, faă de care
valorile momentelor de inerie sunt egale, este un cilindru circular a cărui axă de
Please purchase 'e-PDF Converter and Creator' on http://www.e-pdfconverter.com to remove this message.
5/11/2018 Geometria Maselor - slidepdf.com
http://slidepdf.com/reader/full/geometria-maselor 17/30
4. Geometria maselor
67
simetrie trece prin centrul de greutate al corpului şi este paralelă cu direciadată;
3. Relaia dintre momentele de inerie faă de două axe paralele (∆1) şi(∆2) situate la distanele “d1” respectiv “d2” faă de centrul de greutate alcorpului este:
21
22 ddMJJ
12−+= ∆∆ (4.69)
4.2.3. Variaia momentelor de inerie mecanice centrifugale în raport cu
axe paralele
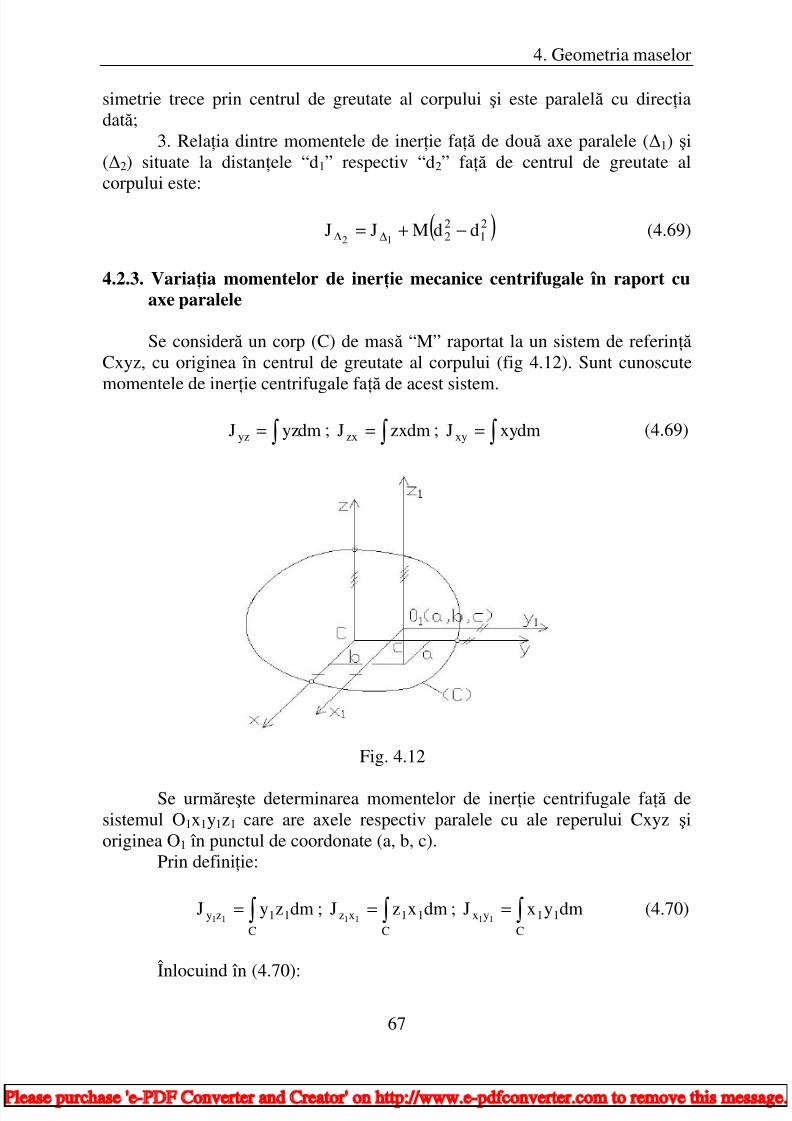
Se consideră un corp (C) de masă “M” raportat la un sistem de referină Cxyz, cu originea în centrul de greutate al corpului (fig 4.12). Sunt cunoscute
momentele de inerie centrifugale faă de acest sistem.
dmyzJ yz ∫ = ; dmzxJ zx ∫ = ; dmxyJ xy ∫ = (4.69)
Fig. 4.12
Se urmăreşte determinarea momentelor de inerie centrifugale faă desistemul O1x1y1z1 care are axele respectiv paralele cu ale reperului Cxyz şioriginea O1 în punctul de coordonate (a, b, c).
Prin definiie:
∫ =C
11zy dmzyJ11
; ∫ =C
11xz dmxzJ11
; ∫ =C
11yx dmyxJ11
(4.70)
Înlocuind în (4.70):
Please purchase 'e-PDF Converter and Creator' on http://www.e-pdfconverter.com to remove this message.
5/11/2018 Geometria Maselor - slidepdf.com
http://slidepdf.com/reader/full/geometria-maselor 18/30
Statica
68
x1=x-a; y1=y-b; z1=z-c (4.71)obinem:
( )( ) ∫ ∫ ∫ ∫ ∫ −−+=−−=
CCCC C
zy zdmbydmcdmbcyzdmdmczbyJ11
( )( ) ∫ ∫ ∫ ∫ ∫ −−+=−−=C CCCC
xz xdmczdmadmcazxdmdmaxczJ11
(4.72)
( )( ) ∫ ∫ ∫ ∫ ∫ −−+=−−=CCCCC
yx ydmaxdmbdmabxydmdmbyaxJ11
Deoarece centrul de greutate se află în originea sistemului de referină (xC=0, yC=0, zC=0), teorema momentelor statice conduce la:
0Mxxdm C)C(
==∫ ; 0Myydm C)C(
==∫ ; 0Mzzdm C)C(
==∫ (4.73)
Substituind (4.69) şi (4.73) în (4.72) şi tinând seama că Mdm)C(
=∫ ,
rezultă relaiile:
MbcJJ yzzy 11+= ; McaJJ zxxz 11
+= ; MabJJ xyyx 11+= (4.74)
care exprimă teorema lui Steiner în cazul momentelor de inerie centrifugale.
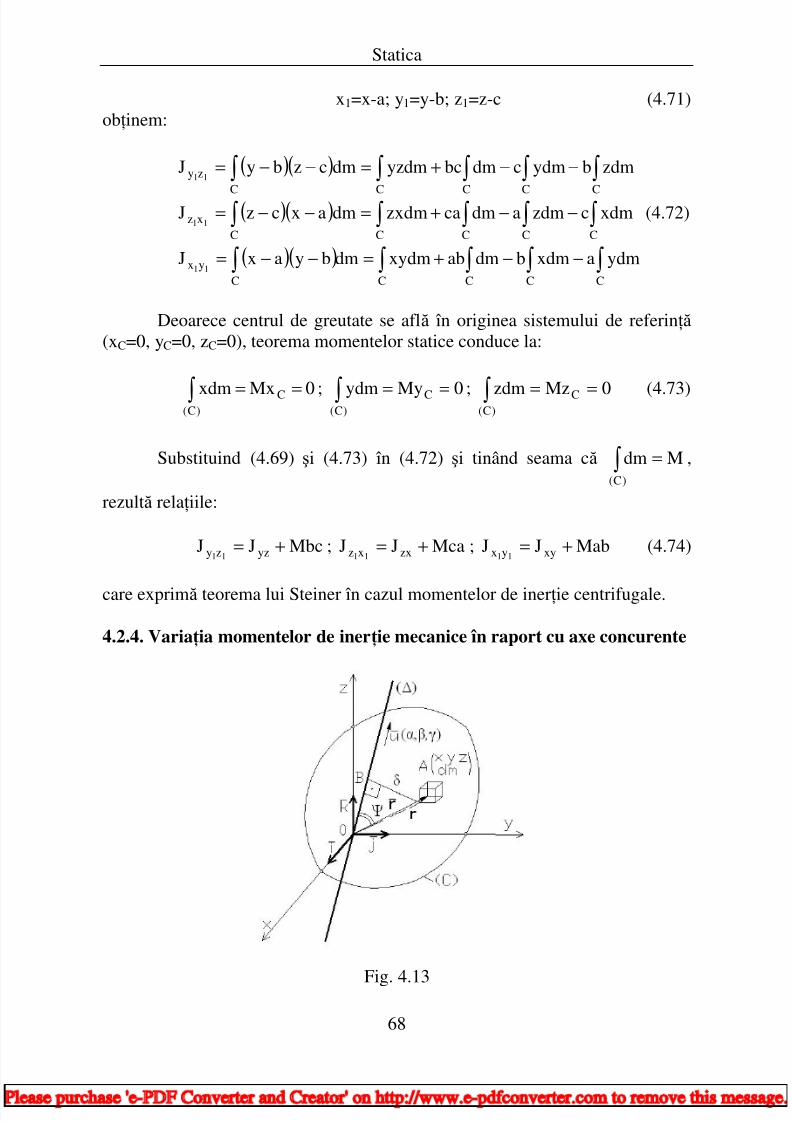
4.2.4. Variaia momentelor de inerie mecanice în raport cu axe concurente
Fig. 4.13
Please purchase 'e-PDF Converter and Creator' on http://www.e-pdfconverter.com to remove this message.

5/11/2018 Geometria Maselor - slidepdf.com
http://slidepdf.com/reader/full/geometria-maselor 19/30
4. Geometria maselor
69
Se dă un corp (C) la care sunt cunoscute momentele de inerie axiale şicentrifugale Jx, Jy, Jz, Jxy, Jyz, Jzx, faă de un sistem de referină Oxyz (fig. 4.13 ).Fie o dreaptă (∆) care trece prin O al cărei versor are cosinusurile directoare: α,β şi γ. Se cere determinarea momentului de inerie J∆ al corpului faă de axa (∆).
Prin definiie:
dmJ)C(
2∫ δ=∆ (4.75)
Pătratul distanei “δ” de la un punct oarecare A(x,y,z) la axa (∆) se înlocuieşte cu:
( ) ( ) ( ) ( ) =⋅−=ψ −=−=δ2222222 urrcosrrOBOA ( ) ( ) =γ +β+α−++
2222 zyxzyx
( )( ) ( ) =γ +β+α−γ +β+α++= 2222222 zyxzyx ( ) ( ) ( ) zx2yz2xy2yxxzzy 222222222 γα−βγ −αβ−+γ ++β++α= (4.76)
În (4.76) a fost folosită identitatea: 1222 =γ +β+α Introducând (4.76) în (4.75) şi tinând seama de relaiile de definiie
(4.55) si (4.57) se obine relaia căutată:
zxyzxyz2
y2
x2 J2J2J2JJJJ γα−βγ −αβ−γ +β+α=∆ (4.77)
Relaia (4.77) exprimă legea de varia ie a momentelor de iner ie în
raport cu axe concurente. Forma matriceală a acesteia este:
[ ] [ ] [ ]uJuJ T⋅⋅=∆ , (4.78a)
unde:
[ ] [ ]γ βα=Tu ; [ ]
−−
−−−−
=
zzyzx
yzyyx
yzxyx
JJJ
JJJJJJ
J (4.78b)
Matricea [J] se numeste tensor iner ial sau matricea momentelor de
iner ie. Dacă sistemul material este situat în planul xOy, axa (∆) fiind de
asemenea în acest plan, înclinata cu unghiul “φ” faă de Ox, rezultă: z=0, γ=0,α=cosφ, β=sinφ, iar formula (4.77) devine:
Please purchase 'e-PDF Converter and Creator' on http://www.e-pdfconverter.com to remove this message.
5/11/2018 Geometria Maselor - slidepdf.com
http://slidepdf.com/reader/full/geometria-maselor 20/30
Statica
70
ϕϕ−ϕ+ϕ=∆ cossinJ2sinJcosJJ xy2
y2
x (4.79)
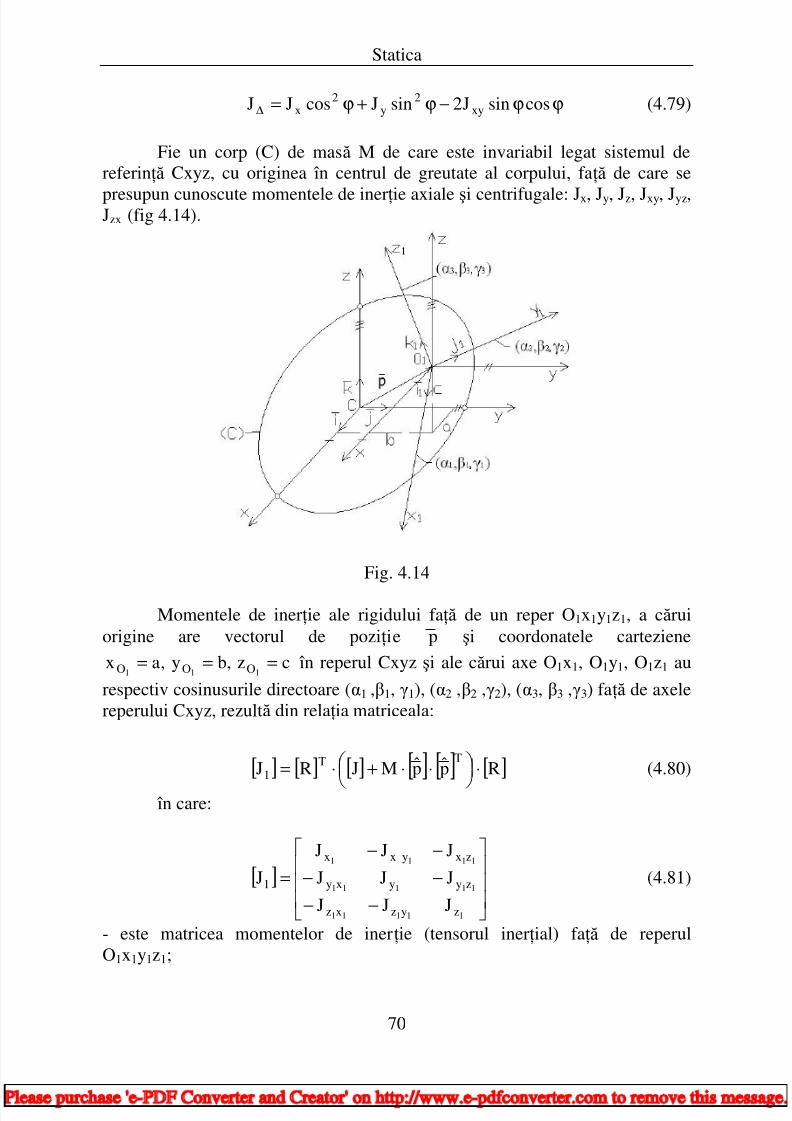
Fie un corp (C) de masă M de care este invariabil legat sistemul dereferină Cxyz, cu originea în centrul de greutate al corpului, faă de care se
presupun cunoscute momentele de inerie axiale şi centrifugale: Jx, Jy, Jz, Jxy, Jyz,Jzx (fig 4.14).
Fig. 4.14
Momentele de inerie ale rigidului faă de un reper O1x1y1z1, a căruiorigine are vectorul de poziie p şi coordonatele carteziene
cz,by,ax111 OOO === în reperul Cxyz şi ale cărui axe O1x1, O1y1, O1z1 au
respectiv cosinusurile directoare (α1 ,β1, γ1), (α2 ,β2 ,γ2), (α3, β3 ,γ3) faă de axelereperului Cxyz, rezultă din relaia matriceala:
[ ] [ ] [ ] [ ] [ ] [ ]Rp̂p̂MJRJTT
1 ⋅
⋅⋅+⋅= (4.80)
în care:
[ ]
−−
−−
−−
=
11111
11111
1111
zyzxz
zyyxy
zxyxx
1
JJJ
JJJ
JJJ
J (4.81)
- este matricea momentelor de inerie (tensorul inerial) faă de reperulO1x1y1z1;
Please purchase 'e-PDF Converter and Creator' on http://www.e-pdfconverter.com to remove this message.

5/11/2018 Geometria Maselor - slidepdf.com
http://slidepdf.com/reader/full/geometria-maselor 21/30
4. Geometria maselor
71
[ ]
−−
−−
−−
=
zzyzx
yzyyx
yzxyx
JJJ
JJJ
JJJ
J (4.82)
- este matricea momentelor de inerie (tensorul inerial) faă de reperul Cxyz;
[ ]
γ γ γ
βββ
ααα
=
321
321
321
R (4.83)
- este matricea cosinusurilor directoare numită şi matrice de rotaie;
[ ]
−−
−
=0aba0c
bc0
p̂ (4.84)
- este matricea antisimetrică asociată vectorului de poziie al punctuluiO1 faă de punctul C;
[ ] [ ]
+−−
−+−
−−+
⋅=⋅⋅22
22
22
T
bacbca
bcacba
acabcb
Mp̂p̂M (4.85)
- este matricea de inerie a punctului O1 în care se consideră concentrată întreaga masa “M” a corpului, faă de reperul Cxyz.
4.2.5. Momente principale de inerie. Axe principale de inerie
Din relaia (4.77) se constată că momentul de inerie mecanic “J∆” faă de axa “(∆)” ce trece prin originea sistemului de referină Oxyz depinde deorientarea axei prin cosinusurile directoare α, β, γ, care respectă egalitatea:
1222 =γ +β+α (4.86)
Se numesc axe principale de iner ie, relative la un punct, acele axeconcurente în punctul dat faă de care valorile momentelor de inerie devinextreme. Momentele de inerie în raport cu aceste axe se numesc momente
principale de iner ie. Determinarea momentelor principale de inerie conduce la aflarea
extremelor unei funcii supuse la legături. În Analiza matematică, pentrudeterminarea extremelor legate sau condiionate ale unei funcii de mai multe
Please purchase 'e-PDF Converter and Creator' on http://www.e-pdfconverter.com to remove this message.

5/11/2018 Geometria Maselor - slidepdf.com
http://slidepdf.com/reader/full/geometria-maselor 22/30
Statica
72
variabile, se utilizează îndeosebi metoda lui Lagrange (Lagrange, Joshep-Louis,1736-1813). Metoda constă în înlocuirea funciei de studiat
y = f (x1, x2, …, xn) , (4.87)
între variabilele căreia există “p<n” relaii de legatură:
φ1(x1, x2, …, xn)=0φ2(x1, x2, …, xn)=0………………….. (4.88)φp(x1, x2, …, xn)=0.
cu o funcie auxiliară
j
p
1 j
jy ϕλ+=Φ ∑=
, (4.89)
în care “λ j” sunt parametri nedeterminai, numiti multiplicatorii lui Lagrange.Noua funcie depinde de “n+p” variabile considerate independente. Pentru cafunctie Φ sa aibă un extrem este necesar ca cele “n + p” derivate pariale înraport cu (x1, x2, …, xn) , (λ 1 ,λ 2 ,…,λ p) să se anuleze:
0x i
=∂
Φ∂, (i=1, 2, …, n); j
i
ϕ≡λ∂
Φ∂(x1, x2, …, xp) = 0, (j=1, 2, …, p) (4.90)
Din sistemul (4.90), de “n + p” ecuaii, în general neliniare, se determină multiplicatorii “λ j (j =1, 2, …, p)” şi valorile variabilelor “xi, (i=1, 2, …, n)”pentru care funcia “y” devine staionară, f ără a putea preciza caracterulextremului.
În cazul funciei (4.77) există o singură relaie de legatură, de forma(4.88), între variabilele reprezentate de cosinusurile directoare:
Φ(α, β, γ)≡1- α2- β2- γ2=0 (4.91)
Funcia ajutătoare va fi:
222zxyzxy
2z
2y
2x 21J2J2J2JJJ γ −β−α−λ+γα−βγ −αβ−γ +β+α=Φ
(4.92)
Egalând cu zero derivatele pariale ale acestei funcii,
02J2J2J2zxxyx
=λα−γ −β−α≡α∂
Φ∂;
Please purchase 'e-PDF Converter and Creator' on http://www.e-pdfconverter.com to remove this message.

5/11/2018 Geometria Maselor - slidepdf.com
http://slidepdf.com/reader/full/geometria-maselor 23/30
4. Geometria maselor
73
02J2J2J2 yzxyy =λβ−γ −α−β≡β∂
Φ∂;
02J2J2J2 zxyzz =λγ −α−β−γ ≡γ ∂
Φ∂,
obinem un sistem liniar şi omogen în necunoscutele α, β, γ:
( )
( )( )
=γ λ−+β−α−
=γ −βλ−+α−
=γ −β−αλ−
0JJJ
0JJJ
0JJJ
zyzzx
yzyyz
zxxyx
(4.93)
care nu admite soluii banale α = 0, β = 0, γ = 0, întrucât α2+β2+γ2=1. Rezultă că determinantul format cu coeficienii necunoscutelor trebuie să fie nul:
0
JJJ
JJJ
JJJ
zyzzx
yxyyx
zxxyx
=
λ−−−
−λ−−
−−λ−
(4.94)
Deoarece elementele determinantului sunt simetrice faă de diagonalaprincipală ecuaia de gradul trei care rezultă din dezvoltarea lui are întotdeauna
rădăcini reale:
0LLL 322
13 =+λ−λ+λ− , (4.95)
unde:
=−−−−=
++=−−−++=
++=++=
321zxyzxyy2zxx
2yzz
2xyzyx3
1332212zx
2yz
2xyxzzyyx2
321zyx1
JJJJJJ2JJJJJJJJJL
JJJJJJJJJJJJJJJL
JJJJJJL
(4.96)
Coeficientii L1, L2, L3 sunt trei invariani (liniar, pătratic şi cubic) care nudepind de alegerea sistemului de referinta Oxyz.
Se demonstrează ca rădăcinile ecuatiei (4.95) sunt chiar valorile extremeale momentului de inerie J∆.
Inlocuind λ =λ 1 in (4.93) şi asociind (4.91) rezultă cosinusurile directoareα1 ,β1 ,γ1 ale axei principale ∆1 în raport cu care momentul de inerie J∆ devineextrem. In baza relaiei (4.77) valoarea momentului de inerie corespunzatoare
acestei direcii este:
Please purchase 'e-PDF Converter and Creator' on http://www.e-pdfconverter.com to remove this message.

5/11/2018 Geometria Maselor - slidepdf.com
http://slidepdf.com/reader/full/geometria-maselor 24/30
Statica
74
11zx11yz11xy21z
21y
21x1 J2J2J2JJJJ αγ −γ β−βα−γ +β+α= (4.97)
Rescriem ecuaiile (4.93), care sunt verificate de λ =λ 1 , α=α1 ,β=β1, γ=γ1:
( )( )
( )
=γ λ−+β−α−
=γ −βλ−+α−
=γ −β−αλ−
0JJJ
0JJJ0JJJ
11z1yz1zx
1yz11y1yz
1zx1xy11x
(4.98)
Înmulim prima ecuaie cu α1, a doua cu β1, a treia cu γ1 şi le adunăm:
0J2J2J2JJJ 21
21
21111zx11yz11xy
21z
21y
21x =γ +β+αλ−αγ −γ β−βα−γ +β+α
(4.99)inând seama de (4.86) şi comparând relaiile (4.99) şi (4.97), rezultă că λ 1=J1. Analog se demonstrează că λ 2=J2, λ 3=J3. Axele corespunzatoareparametrilor λ 2 si λ 3 le vom nota cu (∆2) respectiv (∆3).
Momentele de inertie J1, J2, J3 sunt momentele principale de inerie, iaraxele (∆1), (∆2), (∆3) corespunzatoare, axele principale de inerie.
Observa ii privind axele principale de iner ie 1. Cele trei axe principale de inerie formează un sistem cartezian
triortogonal.Pentru demonstraie se multiplică ecuaiile (4.98), respectiv cu α2, β2, γ2
şi se adună:
( )
( ) ( ) ( ) 0JJJ
JJJ
1221zx1221yz1221xy
21z21y21x2121211
=αγ +αγ −βγ +βγ −αβ+αβ−
−γ γ +ββ+αα+γ γ +ββ+ααλ−(4.100)
Se rescrie sistemul (4.93) pentru λ =λ 2 , α=α2, β=β2, γ=γ2, se înmulescecuaiile, respectiv cu α1, β1, γ1 şi se adună:
( )
( ) ( ) ( ) 0JJJ
JJJ
1221zx1221yz1221xy
21z21y21x2121212
=αγ +αγ −βγ +βγ −αβ+αβ−
−γ γ +ββ+αα+γ γ +ββ+ααλ−(4.101)
Făcând diferena relaiilor (4.101) şi (4.100) rezultă:
( )( ) 021212121 =γ γ +ββ+ααλ−λ (4.102)
Întrucât, în general, λ 1 ≠λ 2, relaia (4.102) devine:
Please purchase 'e-PDF Converter and Creator' on http://www.e-pdfconverter.com to remove this message.
5/11/2018 Geometria Maselor - slidepdf.com
http://slidepdf.com/reader/full/geometria-maselor 25/30
4. Geometria maselor
75
0212121 =γ γ +ββ+αα (4.103)
Membrul din stânga relaiei (4.103) reprezintă produsul scalar alversorilor axelor (∆1) şi (∆2):
21212121 uu γ γ +ββ+αα=⋅ (4.104)Ester evident că:
0uu 21 =⋅ (4.105)
adică axele (∆1) şi (∆2) sunt ortogonale. Analog se demonstrează perpendicularitatea axelor (∆2) si (∆3), respectiv (∆3) şi (∆1).
Ca parametrii directori ai axelor principale de inertie pot fi consideratiminorii uneia din liniile determinantului (4.94) în care s-a inlocuit λ , respectiv
cu J1, J2, J3:- pentru axa (∆1),
1zzy
yz1y
JJJ
JJJ
−−
−−;
zx1z
yxyz
JJJ
JJ
−−
−−;
yzzx
1yyx
JJ
JJJ
−−
−−(4.106)
- pentru axa (∆2),
2zzy
yz2y
JJJ
JJJ
−−
−−
; zx2z
yxyz
JJJ
JJ
−−
−−
; yzzx
2yyx
JJ
JJJ
−−
−−
(4.107)
- pentru axa (∆3),
3zzy
yz3y
JJJ
JJJ
−−
−−;
zx3z
yxyz
JJJ
JJ
−−
−−;
yzzx
3yyx
JJ
JJJ
−−
−−(4.108)
2. Axele principale de inerie care trec prin centrul de greutate al
sistemului material se numesc axe principale centrale de iner ie.3. În raport cu planele determinate de axele principale de inerie,momentele de inerie centrifugale sunt nule.
Pentru demonstraie vom considera un sistem de referinta Ox1y1z1 înraport cu care momentele de inerie centrifugale sunt nule:
0J11yx = ; 0J
11zy = ; 0J11xz = (4.109)
Presupunând cunoscute momentele de inerie axiale1xJ ,
1yJ ,1zJ ,
momentele de inertie principale rezultă din ecuaia:
Please purchase 'e-PDF Converter and Creator' on http://www.e-pdfconverter.com to remove this message.

5/11/2018 Geometria Maselor - slidepdf.com
http://slidepdf.com/reader/full/geometria-maselor 26/30
Statica
76
( )( )( ) 0JJJ
J00
0J0
00J
111
1
1
1
zyx
z
y
x
=λ−λ−λ−=
λ−
λ−
λ−
(4.110)
Rezultă că:1x11 JJ ==λ ,
1y22 JJ ==λ ,1z33 JJ ==λ , adică sistemul
Ox1y1z1 este construit pe axele principale de inerie.4. Momentul de inerie faă de o axa (∆), care trece prin O şi care este
definită prin cosinusirile directoare α, β, γ în raport cu axele principale deinerie este:
23
22
21 JJJJ γ +β+α=∆ (4.111)
5. Daca sistemul material este situat într-un plan (de exemplu planulxOy) atunci:
0z = ; ∫ =
)S(x ydmJ ; ∫ =
)S(y xdmJ ; ( )∫ +==+=
)S(yxO
22z JJJdmyxJ ;
∫ =
)X(xy xydmJ ; 0JJ xzyz == (4.112)
Ecuaia (4.94) devine:
0
J00
0JJ
0JJ
O
yyx
xyx
=
λ−
λ−−
−λ−
(4.113)
sau,
( ) ( ) 0JJJJJJ 2xyyxyx
2O =−+λ+−λλ− (4.114)
având rădăcinile:
2xy
2xyyx
2,12,1 J2
JJ
2
JJJ +
−±
+==λ ; O33 JJ ==λ (4.115)
Cunoaşterea momentelor principale de inerie dă posibilitatea aflăriimomentelor de inerie în raport cu orice alt sistem Oxy având acceaşi origine cusistemul axelor principale şi fiind rotit cu unghiul “α” faă de acesta:
α+α= 22
21x sinJcosJJ ; α+α= 2
22
1y cosJsinJJ ; (4.116)
Please purchase 'e-PDF Converter and Creator' on http://www.e-pdfconverter.com to remove this message.
5/11/2018 Geometria Maselor - slidepdf.com
http://slidepdf.com/reader/full/geometria-maselor 27/30
4. Geometria maselor
77
α−
= 2sin2
JJJ 21
xy (4.117)
Direciile principale, pentru care momentul de inerie devine extrem, seobin anulând derivata în raport cu unghiul “φ” a expresiei J∆ data de (4.79):
( ) 0sincosJ2cossinJ2sincosJ2d
dJ 22xyyx =ϕ−ϕ−ϕϕ+ϕϕ−=
ϕ∆ (4.118)
Rezultă:
xy
xy
JJ
J22tg
−=ϕ (4.119)
Din această relaie se obin pentru unghiul “φ” două valori “φ1” şi “φ2”,care diferă între ele cu π /2, fapt ce demonstrează că direciile principale suntperpendiculare.
4.2.6. Elipsoidul de inertie
Expresia (4.77), reprezentând legea de variaie a momentului de inerie în raport cu axe concurente, poate fi susceptibilă de o interpretare geometrică dacă pe axa (∆) de orientare (α, β, γ) se consideră un punct “Q” astfel incât:
∆
=JHOQ (4.120)
unde J∆ este momentul de inerie mecanic al corpului faa de axa (∆), iar H esteo constantă de dimensiune astfel încât fracia din membrul doi sa aibă dimensiune de lungime. În particular, constanta “H” poate lua valoarea “1”(H=1).
Se cere aflarea locului geometric al punctului Q atunci cănd axa (∆) işischimbă orientarea.
Vom nota cu “x, y, z” coordonatele punctului Q în sistemul de referină Oxyz (fig. 4.15). Cosinusurile directoare ale axei (∆) pot fi exprimate astfel:
H
Jx
OQ
x ∆==α ;
H
Jy
OQ
y ∆==β ;
H
Jz
OQ
z ∆==α (4.121)
Înlocuind (4.121) în (4.77) obinem locul geometric căutat:
2zxyzxy
2z
2y
2x HzxJ2yzJ2xyJ2zJyJxJ =−−−++ (4.122)
Please purchase 'e-PDF Converter and Creator' on http://www.e-pdfconverter.com to remove this message.
5/11/2018 Geometria Maselor - slidepdf.com
http://slidepdf.com/reader/full/geometria-maselor 28/30
Statica
78
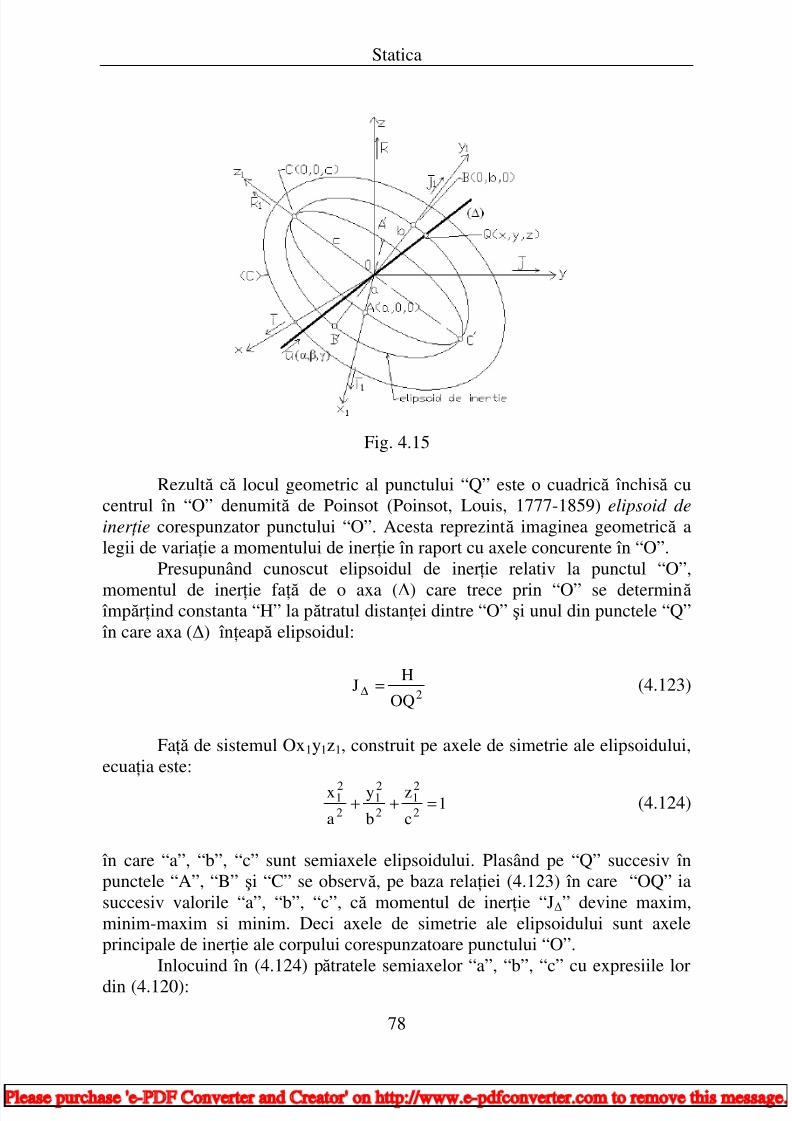
Fig. 4.15
Rezultă că locul geometric al punctului “Q” este o cuadrică închisă cucentrul în “O” denumită de Poinsot (Poinsot, Louis, 1777-1859) elipsoid de
iner ie corespunzator punctului “O”. Acesta reprezintă imaginea geometrică alegii de variaie a momentului de inerie în raport cu axele concurente în “O”.
Presupunând cunoscut elipsoidul de inerie relativ la punctul “O”,
momentul de inerie faă de o axa (∆) care trece prin “O” se determină împărind constanta “H” la pătratul distanei dintre “O” şi unul din punctele “Q” în care axa (∆) îneapă elipsoidul:
2OQ
HJ =∆ (4.123)
Faă de sistemul Ox1y1z1, construit pe axele de simetrie ale elipsoidului,ecuaia este:
1c
z
b
y
a
x2
21
2
21
2
21 =++ (4.124)
în care “a”, “b”, “c” sunt semiaxele elipsoidului. Plasând pe “Q” succesiv înpunctele “A”, “B” şi “C” se observă, pe baza relaiei (4.123) în care “OQ” iasuccesiv valorile “a”, “b”, “c”, că momentul de inerie “J∆” devine maxim,minim-maxim si minim. Deci axele de simetrie ale elipsoidului sunt axeleprincipale de inerie ale corpului corespunzatoare punctului “O”.
Inlocuind în (4.124) pătratele semiaxelor “a”, “b”, “c” cu expresiile lordin (4.120):
Please purchase 'e-PDF Converter and Creator' on http://www.e-pdfconverter.com to remove this message.

5/11/2018 Geometria Maselor - slidepdf.com
http://slidepdf.com/reader/full/geometria-maselor 29/30
4. Geometria maselor
79
1
2
J
1a = ;
2
2
J
1b = ;
3
2
J
1c = (4.125)
obinem o nouă formă a ecuaiei elipsoidului în raport cu un sistem de referină
construit pe axele principale de inerie:22
13212
211 HzJyJxJ =++ (4.126)
Din compararea relaiilor (4.122) şi (4.126) se constată că în ultimalipsesc termenii care conin momentele de inerie centrifugale. Se confirmă încă o dată că în raport cu axele principale de inerie momentele de ineriecentrifugale sunt nule:
0JJJ 111111 xzzyyx === (4.127)
Propriet ă i ale elipsoidului de iner ie 1. Elipsoidul de inerie corespunzător centrului maselor se numeşte
elipsoid central de inertie. În cazul unui corp omogen acest elipsoid urmăreşteforma acestuia.
2. Orice axă de simetrie a unui corp omogen este axă principală deinerie pentru toate punctele ei.
3. În orice punct al axei de simetrie a unui corp de revoluie, elipsoidul
de inerie este unul de rotaie în raport cu această axă. Pentru demonstraie vomconsidera axa Oz1 drept axa de rotaie. Rezultă : J1=J2. Ecuaia (4.126) devine:
( ) 2213
21
211 HzJyxJ =++ (4.128)
şi reprezintă un elipsoid de rotaie în jurul axei Oz1.4. Pentru ca un elipsoid definit de ecuaia:
1c
z
b
y
a
x
2
21
2
21
2
21
=++ (4.129)
să fie elipsoid de inerie trebuie ca semiaxele sa respecte condiiile:
222 c
1
b
1
a
1≥+ ;
222 a
1
c
1
b
1≥+ ;
222 b
1
a
1
c
1≥+ (4.130)
Inegalităile (4.130) se obin din (4.62):
321 JJJ ≥+ ; 132 JJJ ≥+ ; 213 JJJ ≥+ (4.131)
Please purchase 'e-PDF Converter and Creator' on http://www.e-pdfconverter.com to remove this message.
5/11/2018 Geometria Maselor - slidepdf.com
http://slidepdf.com/reader/full/geometria-maselor 30/30
Statica
80
inându-se seama de relaiile (4.125).5. În cazul unor mase repartizate numai în planul xOy ecuaia (4.122)
devine:2
xy2
y2
x HxyJ2yJxJ =−+ (4.132)
şi reprezintă elipsa de iner ie relativă la punctul O.În raport cu axele principale de inerie, elipsa de inerie va avea ecuaia:
2212
211 HyJxJ =+ (4.133)
Presupunând că J2<J1, faă de orice axa (∆) care trece prin “O” şi esteconinută în planul xOy vom avea:
12 JJJ ≤≤ ∆ (4.134)
Înlocuind în (4.133) 211 iMJ = , 2
22 iMJ = si 22
21
2 iiMH = , rezultă o altă expresie a elipsei de inerie:
1i
y
i
x21
21
22
21 =+ (4.135)
i1 si i2 fiind razele principale de iner ie.
Axele principale de inerie fac cu axa Ox unghiurile φ1 respectiv φ2 caresunt rădăcinile ecuaiei trigonometrice (4.119):
xy
xy
JJ
J22tg
−=α (4.136)
Recommended





![[Www.fisierulmeu.ro] Dan Sava - Psihologia Maselor La Scaune](https://img.pdfslide.net/doc/110x75/545ec9efaf795949708b4a01/wwwfisierulmeuro-dan-sava-psihologia-maselor-la-scaune.jpg)











