Oszacowania trajektorii i długości krzywych na bazieinterpolacji nieparametrycznej w wybranych problemach
wizji i grafiki komputerowejSeminarium Instytutu Informatyki, Wydział Automatyki, Elektroniki i
Informatyki. Politechnika Śląska
mgr inż. Piotr Szmielew
Katedra Zastosowań InformatykiWydział Zastosowań Informatyki i Matematyki
Szkoła Główna Gospodarstwa Wiejskiego w Warszawie
11 czerwca 2014
mgr inż. Piotr Szmielew Oszacowania trajektorii i długości krzywych na bazie interpolacji nieparametrycznej w wybranych problemach wizji i grafiki komputerowej11 czerwca 2014 1 / 37
Plan prezentacji
1 Wprowadzenie
2 Rodzaje interpolacji
3 Rodzaje metryk oceny jakości interpolacji
4 PublikacjeOpublikowanePrzyjęte do druku
mgr inż. Piotr Szmielew Oszacowania trajektorii i długości krzywych na bazie interpolacji nieparametrycznej w wybranych problemach wizji i grafiki komputerowej11 czerwca 2014 2 / 37
Wprowadzenie
problem: jak najdokładniej interpolować funkcję γ : R→ Rn majączadane punkty {qi}mi=0 i węzły {ti}mi=0
stosowano różne metody - omówię je pokrótcewarunki wstępne: krzywa γ gładka, regularna (γ′(t) 6= ~0) zadanaparametrycznie γ : [0,T ]→ Rn
upraszczając pytanie: jak przeprowadzić przez zadane punkty krzywą?pytanie powiązane: co jeśli żądamy od tej krzywej pewnych warunków- np. gładkości?
mgr inż. Piotr Szmielew Oszacowania trajektorii i długości krzywych na bazie interpolacji nieparametrycznej w wybranych problemach wizji i grafiki komputerowej11 czerwca 2014 4 / 37
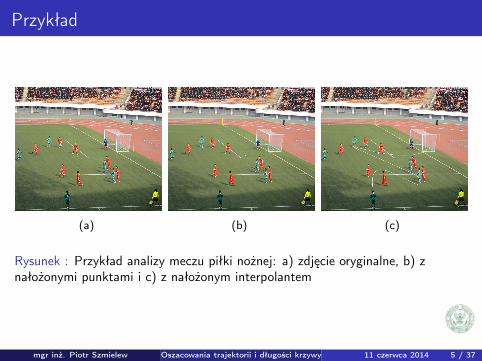
Przykład
(a) (b) (c)
Rysunek : Przykład analizy meczu piłki nożnej: a) zdjęcie oryginalne, b) znałożonymi punktami i c) z nałożonym interpolantem
mgr inż. Piotr Szmielew Oszacowania trajektorii i długości krzywych na bazie interpolacji nieparametrycznej w wybranych problemach wizji i grafiki komputerowej11 czerwca 2014 5 / 37
Interpolacja Lagrange’a
Omówię i pokażę przykłady najprostszej interpolację Lagrange’a - zeznanymi węzłami interpolacyjnymiPochodzi od Lagrange’a (1795 rok), opiera się na wielomianieinterpolacyjnym Lagrange’aPrzykład dla trzech punktów:q0
(t−t1)(t−t2)(t0−t1)(t0−t2) + q1
(t−t0)(t−t2)(t1−t0)(t1−t2) + q2
(t−t0)(t−t1)(t2−t1)(t2−t0)
q0, q1 i q2 to kolejne punkty interpolacyjne, natomiast t0, t1 i t2 toodpowiadające im kolejne węzły, tj. γ(ti ) = qi
mgr inż. Piotr Szmielew Oszacowania trajektorii i długości krzywych na bazie interpolacji nieparametrycznej w wybranych problemach wizji i grafiki komputerowej11 czerwca 2014 7 / 37
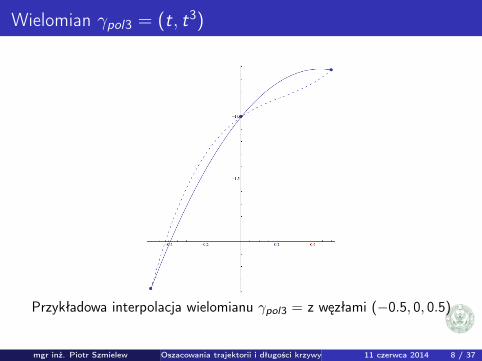
Wielomian γpol3 = (t, t3)
Przykładowa interpolacja wielomianu γpol3 = z węzłami (−0.5, 0, 0.5)
mgr inż. Piotr Szmielew Oszacowania trajektorii i długości krzywych na bazie interpolacji nieparametrycznej w wybranych problemach wizji i grafiki komputerowej11 czerwca 2014 8 / 37
Interpolacja Lagrange’a
Wraz ze wzrostem liczby punktów, rośnie stopień wielomianu -odpowiada on liczbie węzłów −1Chcielibyśmy, żeby zwiększanie liczby węzłów polepszało jakośćinterpolacji... niestety nie zawsze tak jest
mgr inż. Piotr Szmielew Oszacowania trajektorii i długości krzywych na bazie interpolacji nieparametrycznej w wybranych problemach wizji i grafiki komputerowej11 czerwca 2014 9 / 37
Przykład Rungego
Pokazany przez Carla Davida Tolmé Runge w 1901 rokuDotyczy zwiększania stopnia interpolacji przy równoodległych węzłachInterpolacja dotyczyć będzie funkcji γr (t) = (t, 1
1+25t2 ) (nazywanejfunkcją Rungego)W przedziale [−1, 1]
mgr inż. Piotr Szmielew Oszacowania trajektorii i długości krzywych na bazie interpolacji nieparametrycznej w wybranych problemach wizji i grafiki komputerowej11 czerwca 2014 10 / 37
Przykład Rungego
-1.0 -0.5 0.5 1.0
0.2
0.4
0.6
0.8
1.0
(a)
-1.0 -0.5 0.5 1.0
0.2
0.4
0.6
0.8
1.0
(b)
-1.0 -0.5 0.5 1.0
-0.4
-0.2
0.2
0.4
0.6
0.8
1.0
(c)
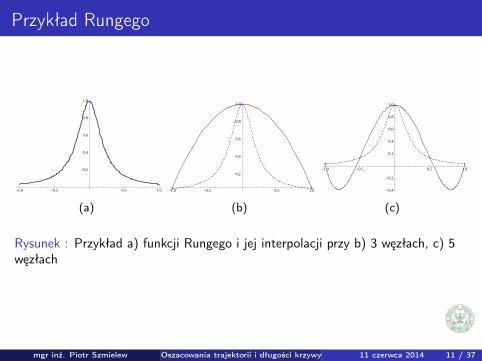
Rysunek : Przykład a) funkcji Rungego i jej interpolacji przy b) 3 węzłach, c) 5węzłach
mgr inż. Piotr Szmielew Oszacowania trajektorii i długości krzywych na bazie interpolacji nieparametrycznej w wybranych problemach wizji i grafiki komputerowej11 czerwca 2014 11 / 37
Przykład Rungego
-1.0 -0.5 0.5 1.0
0.2
0.4
0.6
0.8
1.0
(a)
-1.0 -0.5 0.5 1.0
-1.0
-0.5
0.5
1.0
(b)
-1.0 -0.5 0.5 1.0
-60
-50
-40
-30
-20
-10
(c)
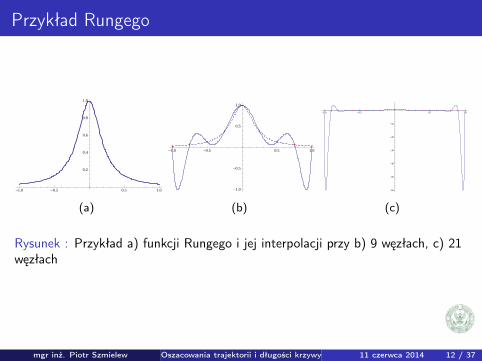
Rysunek : Przykład a) funkcji Rungego i jej interpolacji przy b) 9 węzłach, c) 21węzłach
mgr inż. Piotr Szmielew Oszacowania trajektorii i długości krzywych na bazie interpolacji nieparametrycznej w wybranych problemach wizji i grafiki komputerowej11 czerwca 2014 12 / 37
Dane zredukowane
poprzednie podejście ma jednak pewną wadę - wymaga znajomościwęzłóww momencie jednak gdy interpolacja nie odpowiada prawdziwemuruchowi w czasie bądź nie znamy czasów nie możemy użyć tegoschematutaką sytuację nazywamy danymi zredukowanymi - interpolacjąnieparametryczną
mgr inż. Piotr Szmielew Oszacowania trajektorii i długości krzywych na bazie interpolacji nieparametrycznej w wybranych problemach wizji i grafiki komputerowej11 czerwca 2014 13 / 37
Dane zredukowane
formalnie nazywamy tak punkty interpolacyjne {qi}mi=0, pozbawioneodpowiadających im węzłów (czasów) {ti}mi=0
musimy w pewien sposób odgadnąć te węzły interpolacyjne
mgr inż. Piotr Szmielew Oszacowania trajektorii i długości krzywych na bazie interpolacji nieparametrycznej w wybranych problemach wizji i grafiki komputerowej11 czerwca 2014 14 / 37
Zgadywanie węzłów interpolacji
Zgadywanie losoweZgadywanie na ślepot̂i = i , dla i=0,1,. . . nSkumulowana długość cięciwyt̂0 = 0t̂i+1 = t̂i + ‖qi+1 − qi‖, dla i=1,2,. . . nParametryzacja wykładnicza (uogólnienie obu powyższychprzypadków)t̂0 = 0t̂i+1 = t̂i + ‖qi+1 − qi‖λ, dla i=1,2,. . . n i λ ∈ [0, 1]
mgr inż. Piotr Szmielew Oszacowania trajektorii i długości krzywych na bazie interpolacji nieparametrycznej w wybranych problemach wizji i grafiki komputerowej11 czerwca 2014 15 / 37
Zgadywanie węzłów interpolacji - przykład
(a) (b) (c)
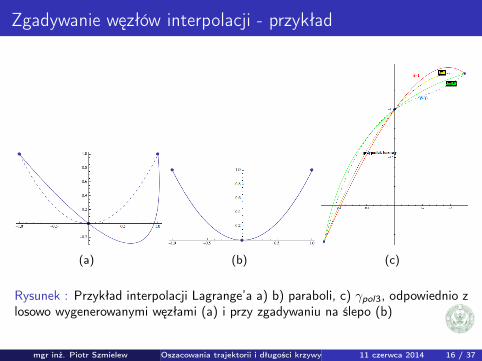
Rysunek : Przykład interpolacji Lagrange’a a) b) paraboli, c) γpol3, odpowiednio zlosowo wygenerowanymi węzłami (a) i przy zgadywaniu na ślepo (b)
mgr inż. Piotr Szmielew Oszacowania trajektorii i długości krzywych na bazie interpolacji nieparametrycznej w wybranych problemach wizji i grafiki komputerowej11 czerwca 2014 16 / 37
Interpolacja Lagrange’a na bazie danych zredukowanych
Stosując odgadnięte węzły do wzoru Lagrange’a otrzymujemyinterpolację Lagrange’a na bazie danych zredukowanychJednakże dotyka jej ten sam problem, co interpolacji Lagrange’a zdanymi węzłami - czyli przykład Rungego
mgr inż. Piotr Szmielew Oszacowania trajektorii i długości krzywych na bazie interpolacji nieparametrycznej w wybranych problemach wizji i grafiki komputerowej11 czerwca 2014 17 / 37
Interpolacja Lagrange’a kawałkami-sklejana na bazie danychzredukowanych
Metodą rozwiązania tego problemu jest podział punktów na segmenty- w tym wypadku po 3 punkty (lub więcej)Następnie do każdego takiego segmentu stosujemy osobno interpolacjęLagrange’aWynik... interpolant bez efektu Rungego
mgr inż. Piotr Szmielew Oszacowania trajektorii i długości krzywych na bazie interpolacji nieparametrycznej w wybranych problemach wizji i grafiki komputerowej11 czerwca 2014 18 / 37
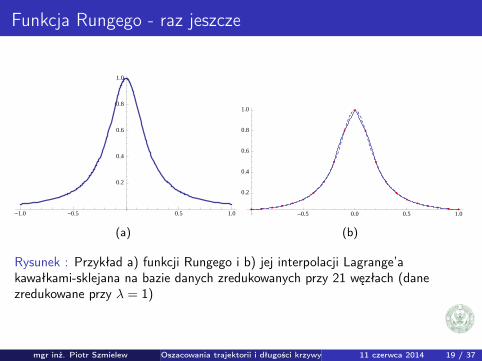
Funkcja Rungego - raz jeszcze
-1.0 -0.5 0.5 1.0
0.2
0.4
0.6
0.8
1.0
(a)
-0.5 0.0 0.5 1.0
0.2
0.4
0.6
0.8
1.0
(b)
Rysunek : Przykład a) funkcji Rungego i b) jej interpolacji Lagrange’akawałkami-sklejana na bazie danych zredukowanych przy 21 węzłach (danezredukowane przy λ = 1)
mgr inż. Piotr Szmielew Oszacowania trajektorii i długości krzywych na bazie interpolacji nieparametrycznej w wybranych problemach wizji i grafiki komputerowej11 czerwca 2014 19 / 37
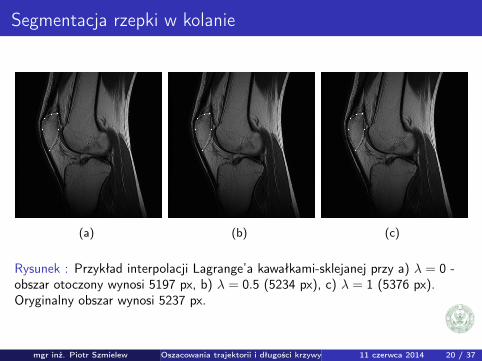
Segmentacja rzepki w kolanie
(a) (b) (c)
Rysunek : Przykład interpolacji Lagrange’a kawałkami-sklejanej przy a) λ = 0 -obszar otoczony wynosi 5197 px, b) λ = 0.5 (5234 px), c) λ = 1 (5376 px).Oryginalny obszar wynosi 5237 px.
mgr inż. Piotr Szmielew Oszacowania trajektorii i długości krzywych na bazie interpolacji nieparametrycznej w wybranych problemach wizji i grafiki komputerowej11 czerwca 2014 20 / 37
Interpolacja kwadratowa-czteropunktowa
Innym podejściem (aczkolwiek nadal opartym na funkcjikawałkami-sklejanej) jest interpolacja kwadratowo-czteropunktowaZapewnia ona taki sam - czwarty stopień zbieżności jak algorytmkawałkami-sklejany Lagrange’a kubiczny dla czwórek punktówJednak dopasowuje lepiej pochodne (prace nad artykułem dotyczącymtego trwają)
mgr inż. Piotr Szmielew Oszacowania trajektorii i długości krzywych na bazie interpolacji nieparametrycznej w wybranych problemach wizji i grafiki komputerowej11 czerwca 2014 21 / 37
Interpolacja kwadratowa-czteropunktowa
Opiera się nad prowadzeniu wektorów i rozwiązywaniu równańwektorowychJednakże działa tylko w R2
Wymaga również odpowiedniego rozkładu punktów i ścisłej wklęsłościlub wypukłości (|K (t)| > 0, gdzie K (t) = det(γ′(t),γ′′(t))
|γ′(t)‖3 oznaczakrzywiznę Gaussa)De facto krzywizna jest oddzielona od zera, ponieważ γ : [0,T ]→ R2
- dziedzina jest zwarta
mgr inż. Piotr Szmielew Oszacowania trajektorii i długości krzywych na bazie interpolacji nieparametrycznej w wybranych problemach wizji i grafiki komputerowej11 czerwca 2014 22 / 37
p1
-0.2 -0.1 0.1 0.2
-0.015
-0.010
-0.005
0.005
0.010
0.015
(a)
pΑ
-0.2 -0.1 0.1 0.2
-0.015
-0.010
-0.005
0.005
0.010
0.015
(b)
p1
pΑ
-0.2 -0.1 0.1 0.2
-0.015
-0.010
-0.005
0.005
0.010
0.015
(c)
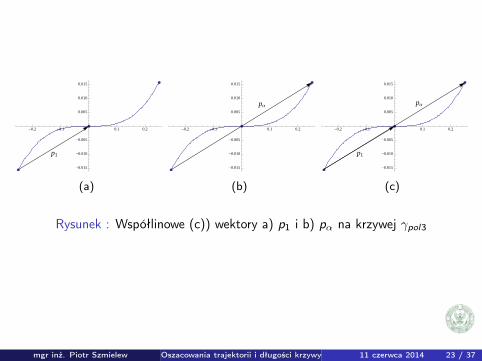
Rysunek : Współlinowe (c)) wektory a) p1 i b) pα na krzywej γpol3
mgr inż. Piotr Szmielew Oszacowania trajektorii i długości krzywych na bazie interpolacji nieparametrycznej w wybranych problemach wizji i grafiki komputerowej11 czerwca 2014 23 / 37
Poprawiony algorytm kwadratowo-czteropunktowy
Jednakże co zrobić gdy dane zawierają punkt przegięcia (czyli gdykrzywizna Gaussa K (t) = wynosi 0)?Proponowana jest następująca heurystyka: wyliczamy oryginalnyinterpolant i sprawdzamy jego krzywiznę, jeśli na określonymsegmencie |K (t)| < ε0 - używamy na tym segmencie interpolacjiLagrange’a dla czterech punktówε0 jest arbitralnie ustaloną wartościąAlgorytm kwadratowo-czteropunktowy ma tę przewagę nad Lagrangemkubicznym, że lepiej estymuje krzywiznę - praca pokazująca to jestobecnie w przygotowaniu
mgr inż. Piotr Szmielew Oszacowania trajektorii i długości krzywych na bazie interpolacji nieparametrycznej w wybranych problemach wizji i grafiki komputerowej11 czerwca 2014 24 / 37
Poprawiony algorytm kwadratowo-czteropunktowy
-1.0 -0.5 0.5 1.0
-1.0
-0.5
0.5
1.0
(a)
-1.0 -0.5 0.5 1.0
-1.0
-0.5
0.5
1.0
(b)
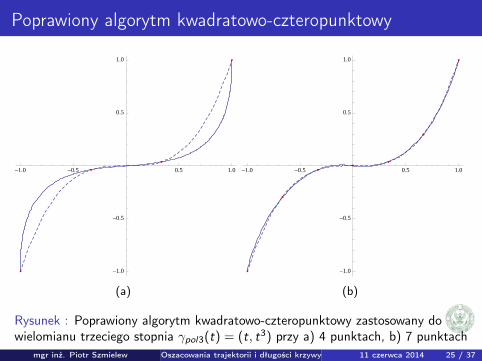
Rysunek : Poprawiony algorytm kwadratowo-czteropunktowy zastosowany dowielomianu trzeciego stopnia γpol3(t) = (t, t3) przy a) 4 punktach, b) 7 punktach
mgr inż. Piotr Szmielew Oszacowania trajektorii i długości krzywych na bazie interpolacji nieparametrycznej w wybranych problemach wizji i grafiki komputerowej11 czerwca 2014 25 / 37
Interpolacja Hermite’a na bazie danych zredukowanych
Oba poprzednie podejścia - o ile zwykle działają dobrze to mająpewien problemNa stykach interpolantów (na łączeniach dwóch segmentów) mogąwystąpić miejsca nieróżniczkowalności funkcjiTaki interpolant jest w klasie C 0
Czasem jednak nie jest to wystarczające
mgr inż. Piotr Szmielew Oszacowania trajektorii i długości krzywych na bazie interpolacji nieparametrycznej w wybranych problemach wizji i grafiki komputerowej11 czerwca 2014 26 / 37
Interpolacja Hermite’a na bazie danych zredukowanych
Rozwiązaniem tego problemu jest zastosowanie interpolacji Hermite’aInterpolant Hermite’a jest gładki - należy do klasy C 1
Wada polega na konieczności znajomości pochodnych, oprócz węzłówinterpolacyjnych
mgr inż. Piotr Szmielew Oszacowania trajektorii i długości krzywych na bazie interpolacji nieparametrycznej w wybranych problemach wizji i grafiki komputerowej11 czerwca 2014 27 / 37
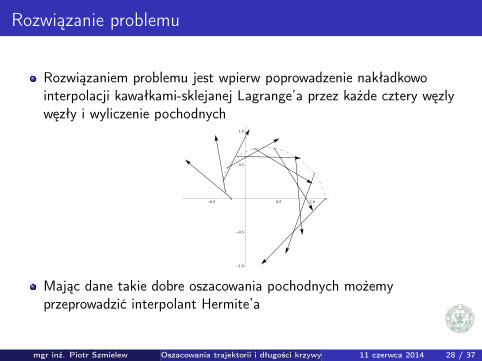
Rozwiązanie problemu
Rozwiązaniem problemu jest wpierw poprowadzenie nakładkowointerpolacji kawałkami-sklejanej Lagrange’a przez każde cztery węzlywęzły i wyliczenie pochodnych
-0.5 0.5 1.0
-1.0
-0.5
0.5
1.0
Mając dane takie dobre oszacowania pochodnych możemyprzeprowadzić interpolant Hermite’a
mgr inż. Piotr Szmielew Oszacowania trajektorii i długości krzywych na bazie interpolacji nieparametrycznej w wybranych problemach wizji i grafiki komputerowej11 czerwca 2014 28 / 37
Otaczanie guza piersi
(a) (b)
x
x x x xx xxxx
x
x
x
xxx
xx
xxx
x
x
x
x
(c)
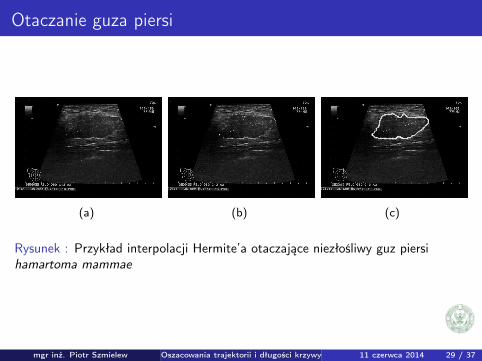
Rysunek : Przykład interpolacji Hermite’a otaczające niezłośliwy guz piersihamartoma mammae
mgr inż. Piotr Szmielew Oszacowania trajektorii i długości krzywych na bazie interpolacji nieparametrycznej w wybranych problemach wizji i grafiki komputerowej11 czerwca 2014 29 / 37
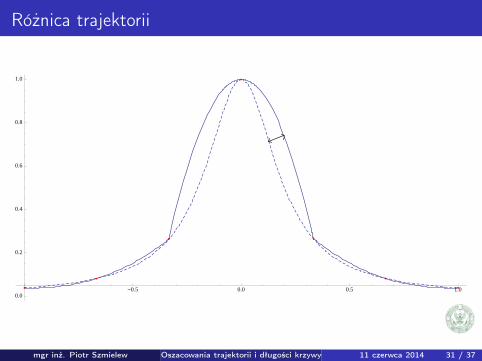
Różnica trajektorii
-0.5 0.0 0.5 1.0
0.0
0.2
0.4
0.6
0.8
1.0
mgr inż. Piotr Szmielew Oszacowania trajektorii i długości krzywych na bazie interpolacji nieparametrycznej w wybranych problemach wizji i grafiki komputerowej11 czerwca 2014 31 / 37
Przygotowania do pracy doktorskiej
W ramach przygotowań do pracy doktorskiej pokazałem:ostrość oszacowania dla trajektorii interpolacji Lagrange’akawałkami-kwadratowej (numerycznie) dla parametryzacjiwykładniczej i λ ∈ [0, 1] - 1+ 2ε, gdzie ε jest pewną własnościąpróbkowania, lub 3 gdy λ = 1ostrość oszacowania dla długości interpolacji Lagrange’akawałkami-kwadratowej (numerycznie) dla parametryzacjiwykładniczej i λ ∈ [0, 1] - min{4, 4ε}ostrość oszacowania dla trajektorii interpolacjikwadratowo-czteropunktowej (numerycznie) - 4ostrość oszacowania dla trajektorii interpolacjikwadratowo-czteropunktowej (symbolicznie) - 4ostrość oszacowania dla trajektorii interpolacji Hermite’a(numerycznie) - 4
mgr inż. Piotr Szmielew Oszacowania trajektorii i długości krzywych na bazie interpolacji nieparametrycznej w wybranych problemach wizji i grafiki komputerowej11 czerwca 2014 32 / 37
Przyszłe kierunki badań (rozwinięte w pracy doktorskiej)
Kolejne zastosowania w grafice i wizji komputerowejWprowadzenie kolejnej metryki - różnica oryginalnej krzywizny ikrzywizny interpolanta i zbadanie zachowania poszczególnychalgorytmówPokazanie ostrości oszacowania długości interpolacjikwadratowo-czteropunktowej (artykuł już jest w przygotowaniu)Analogiczne badania dla interpolanta w klasie C 2 (czyli spline’ówzupełnych)
mgr inż. Piotr Szmielew Oszacowania trajektorii i długości krzywych na bazie interpolacji nieparametrycznej w wybranych problemach wizji i grafiki komputerowej11 czerwca 2014 33 / 37
Opublikowane
Kozera, R., Noakes, L., Szmielew, P.: Length Estimation forExponential Parameterization and ε-Uniform Samplings. In: Huang F.,Sugimoto A. (eds.) PSIVT 2013 Workshops. LNCS, vol. 8334, pp.33–46. Springer-Verlag (2014)Kozera, R., Noakes, L., Szmielew, P.: Trajectory estimation forExponential Parameterization and Different Samplings. In: Saeed, K.,Chaki, R., Cortesi, A., Wierzchoń, S. (eds.) CISIM 2013. LNCS, vol.8104, pp. 430–441. Springer-Verlag (2013)
mgr inż. Piotr Szmielew Oszacowania trajektorii i długości krzywych na bazie interpolacji nieparametrycznej w wybranych problemach wizji i grafiki komputerowej11 czerwca 2014 35 / 37

Przyjęte do druku
Kozera, R., Noakes, L., Szmielew, P.: Sharpness in TrajectoryEstimation for Planar Four-points Piecewise-quadratic Interpolation.LNCS, Springer-Verlag - publikacja wrzesień 2014Kozera, R., Noakes, L., Szmielew, P.: Quartic Orders and Sharpness inTrajectory Estimation for Smooth Cumulative Chord Cubics. LNCS,Springer-Verlag - publikacja wrzesień 2014
mgr inż. Piotr Szmielew Oszacowania trajektorii i długości krzywych na bazie interpolacji nieparametrycznej w wybranych problemach wizji i grafiki komputerowej11 czerwca 2014 36 / 37
Dziękuję za uwagę
(a) (b)
Źródła ilustracji:opracowanie własne (wykresy)źródło własne (obrazy CT i USG)wikimedia commons (mecz piłki nożnej)http://www.domowyprzedszkolak.pl (zagadka połącz punkty)
mgr inż. Piotr Szmielew Oszacowania trajektorii i długości krzywych na bazie interpolacji nieparametrycznej w wybranych problemach wizji i grafiki komputerowej11 czerwca 2014 37 / 37
Recommended