E. Martinelli: Introduzione 1
Sensore: definizione generale
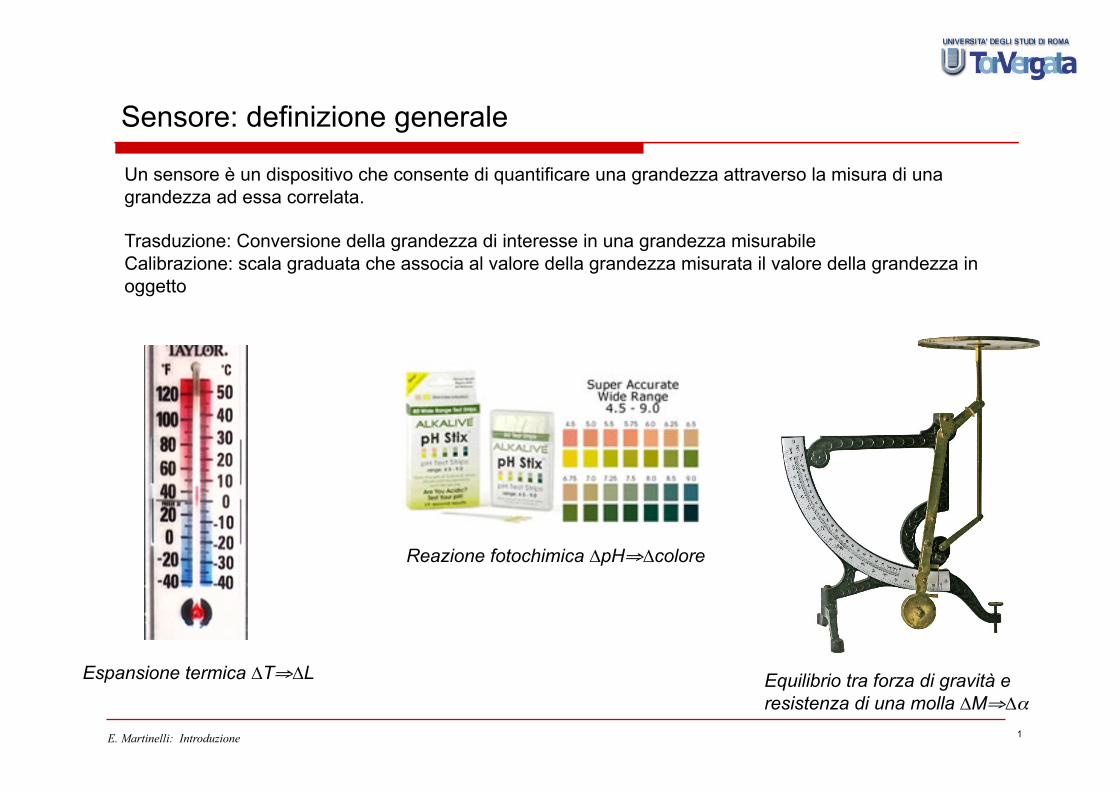
Un sensore è un dispositivo che consente di quantificare una grandezza attraverso la misura di una grandezza ad essa correlata.
Trasduzione: Conversione della grandezza di interesse in una grandezza misurabile Calibrazione: scala graduata che associa al valore della grandezza misurata il valore della grandezza in oggetto
Espansione termica ∆T⇒∆L
Reazione fotochimica ∆pH⇒∆colore
Equilibrio tra forza di gravità e resistenza di una molla ∆M⇒∆α
E. Martinelli: Introduzione 2
Trasduttori, Sensori ed Elettronica
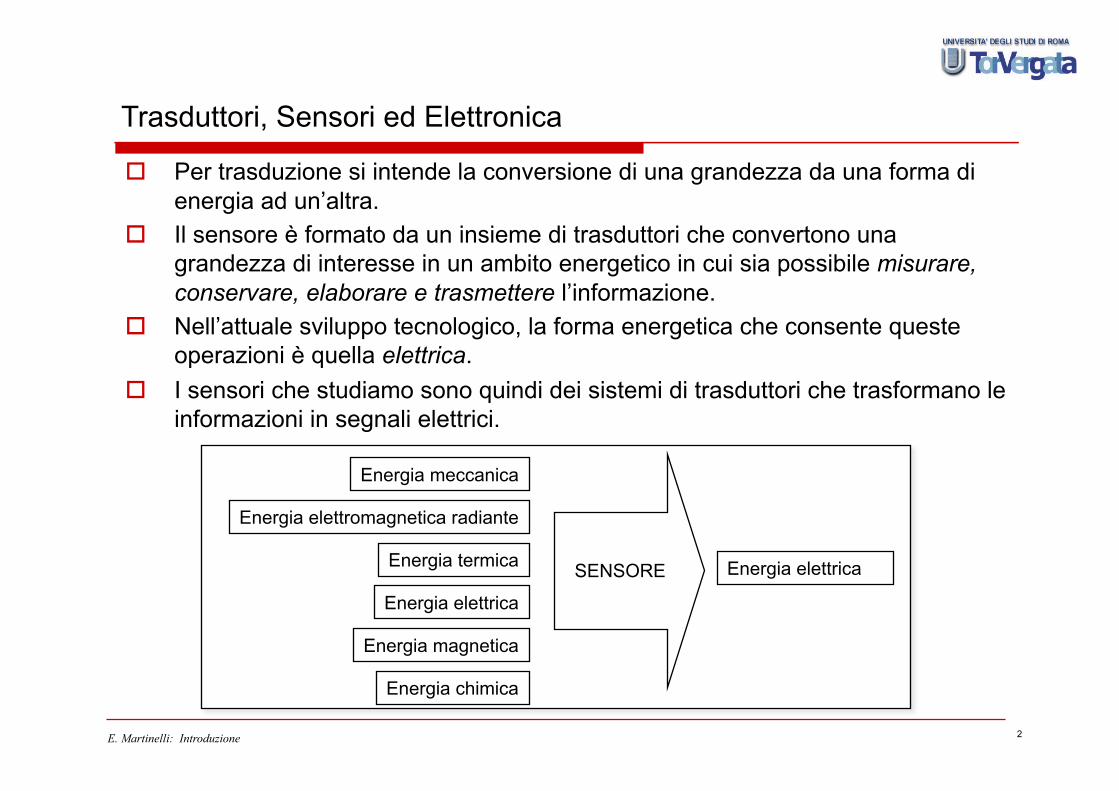
Per trasduzione si intende la conversione di una grandezza da una forma di energia ad un’altra.
Il sensore è formato da un insieme di trasduttori che convertono una grandezza di interesse in un ambito energetico in cui sia possibile misurare, conservare, elaborare e trasmettere l’informazione.
Nell’attuale sviluppo tecnologico, la forma energetica che consente queste operazioni è quella elettrica.
I sensori che studiamo sono quindi dei sistemi di trasduttori che trasformano le informazioni in segnali elettrici.
Energia meccanica
Energia elettromagnetica radiante
Energia termica
Energia magnetica
Energia chimica
Energia elettrica
Energia elettrica SENSORE

E. Martinelli: Introduzione 3
Sensori ed Elettronica
“L’elettronica è la scienza e la tecnica che tratta principalmente dell'ausilio ai sensi dell'uomo per mezzo di dispositivi che raccolgono ed elaborano l'informazione, la trasmettono, la utilizzano per il controllo automatico di macchine, o la presentano in una forma comprensibile all’uomo” Everitt, Proc. IRE 1952
E. Martinelli: Introduzione 4
Sensori: definizione
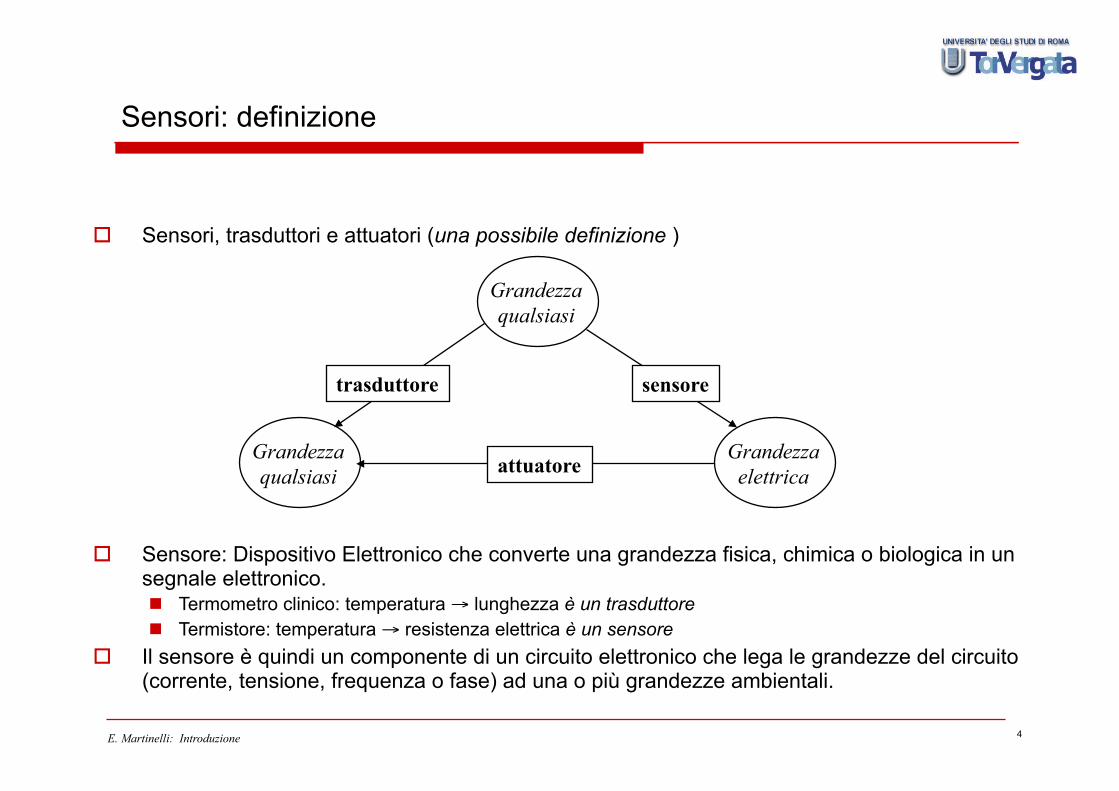
Sensori, trasduttori e attuatori (una possibile definizione )
Sensore: Dispositivo Elettronico che converte una grandezza fisica, chimica o biologica in un segnale elettronico. Termometro clinico: temperatura → lunghezza è un trasduttore Termistore: temperatura → resistenza elettrica è un sensore
Il sensore è quindi un componente di un circuito elettronico che lega le grandezze del circuito (corrente, tensione, frequenza o fase) ad una o più grandezze ambientali.
Grandezza qualsiasi
Grandezza qualsiasi
Grandezza elettrica
trasduttore sensore
attuatore

E. Martinelli: Introduzione 5
I sensori e l’elettronica
Quasi tutti i sistemi elettronici sono connessi a sensori ed attuatori. In elettronica i componenti elettronici hanno valori e parametri dipendenti o
dalle caratteristiche costruttive o dalle caratteristiche del circuito stesso. Grazie ai sensori i valori circuitali dipendono da grandezze esterne al circuito.
Queste caratteristiche rendono possibili una serie di applicazioni dalla realizzazione di strumenti di misura alla mimesi delle attività degli esseri viventi (robotica).
Più il sistema diventa complesso più cresce il numero di sensori, cioè le interfacce con l’ambiente esterno ⇒ sistema multisensoriale.
Un sistema multisensoriale è un sistema in cui le informazioni fornite da più sensori concorrono a definere la conoscenza di un ambiente. Il concetto di “Sensor fusion”

E. Martinelli: Introduzione
Sistema Sensore
6
Electronic Interface
1° Processing Elaboration
A/D Conversion
2° Processing Elaboration
Sensitive Element
Ex. : R=f(T)+R0
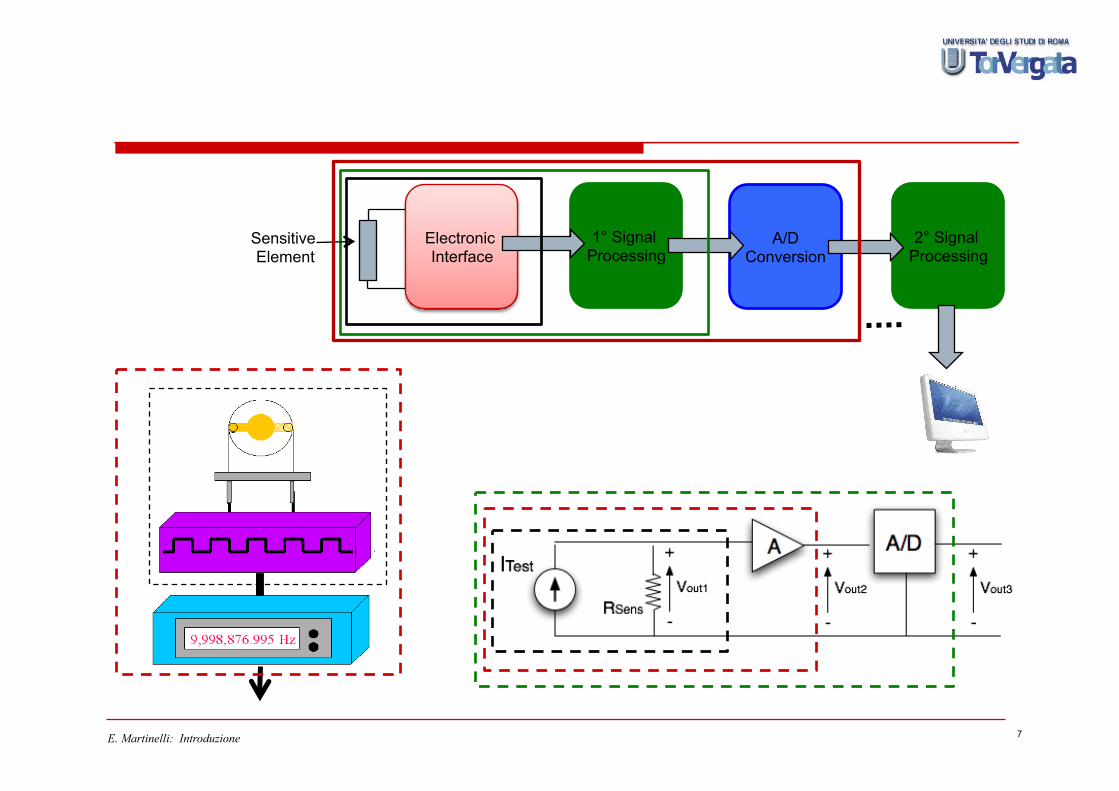
Possibili tipi di Sistema Sensore
E. Martinelli: Introduzione 7
Electronic Interface
1° Signal Processing
A/D Conversion
2° Signal Processing
Sensitive Element
E. Martinelli: Introduzione 8
Classificazione dei sensori: come componenti elettriconici
Resistori Termistore, fotoconduttore, magnetoresistenza, strain gauge, sensore di gas…
Induttori Sensori di posizione, fluxgate magnetometer…
Condensatori Sensori di posizione…
Diodi Fotodiodo, sensori di campo magnetico…
MOSFET MagFET, ISFET…
Differenza di potenziale Effetto Hall (sensore di campo magnetico), ion selective electrodes,…
Generatori di tensione (fem) Termocoppia, fotovoltaico, celle elettrochimiche (sensori di ioni e di gas)…
E. Martinelli: Introduzione 9
Classificazione dei sensori: per applicazione
Sensori di grandezze fisiche Temperatura Radiazione Elettromagnetica
Antenne, sensori infrarossi, luce visibile, UV, X, γ Campo Magnetico Grandezze meccaniche
Posizione Angolare, lineare
Deformazione Accelerazione Pressione Flusso
Sensori di grandezze chimiche Concentrazioni di gas in aria Concentrazioni di ioni in soluzione
Sensori di grandezze biologiche Concentrazioni di anticorpi, proteine, analisi del DNA,virus e batteri
E. Martinelli: Introduzione 10
Paradigma Sensoriale “par excellance”: il corpo umano
Il corpo umano acquisisce la conoscenza dell’ambiente attraverso i recettori sensoriali
Recettori sensoriali di tipo FISICO: tatto, temperatura, ottica (visione), acustica (udito),
… CHIMICO: olfatto e gusto
I segnali dei recettori vengono elaborati (sensazioni) ed integrati per formare la conoscenza (percezione) di un ambiente.
Il corpo umano agisce attraverso attuatori Attuatori esterni: meccanici (muscoli) ed acustici (voce)
che gli consentono di interagire con l’ambiente. Attuatori interni: biochimici (enzimi, ormoni,…) che gli
consentono di modificarsi in funzione dell’ambiente.

E. Martinelli: Introduzione 11
I sensori nel corpo umano
Percezione del mondo esterno: Vista, Udito, Olfatto, Gusto, Tatto, Pressione atmosferica, temperatura, Gravità,
Accelerazione angolare, Accelerazione lineare, scorrere del tempo. Percezioni meccaniche esterne
Equilibrio, Cinestesia (movimento delle articolazioni), Allungamento dei tendini, Allungamento delle fibre muscolari
Percezioni interne Pressione sanguigna, Febbre, Mancanza d’aria, Infiammazione, Sete, Fame, Volume
d’aria nei polmoni, Pressione della vescica, Pressione degli sfinteri, Stomaco pieno, Nausea
Emozioni interne Ira, Paura, Disgusto, Tristezza, Noia, Allegria, dolore morale, senso di colpa
Empatia (percezione delle emozioni altrui) Ira, Paura, Disgusto, Tristezza, Noia, Allegria, dolore morale
Quantità fisiche (misurabili)
Quantità emotive

E. Martinelli: Introduzione 12
Processamento del segnale nei sensi umani
Tessuto recettore (cellule specializzate)
Processamento locale Riduzione dei segnali
Innervamento nel nervo principale
Processamento nel cervello
Sensazione / Percezione Fusione con altri sensi Memoria riconoscimento
Alimentazione Vasi sanguigni
Grandezza fisica
Segnale Bio-chimico
Entità psichica
E. Martinelli: Introduzione 13
Sensazione e Percezione
Sensazione: “Avverte i movimenti delle cose” Percezione: “Riferisce le sensazioni alle cose stesse”
Cartesio: “Le passioni dell’anima” (1649)
Inciso : I movimenti → concetto differenziale (sensibilità)
La percezione come concetto multisensoriale: “coscienza immediata di un tutto strutturato (totalità) le cui parti, considerate
singolarmente) non presentano le stesse qualità della totalità. La percezione ha proprietà inscindibili dal tutto (non ne è la mera somma)” (Gestaltpsychologie)
E. Martinelli: Introduzione 14
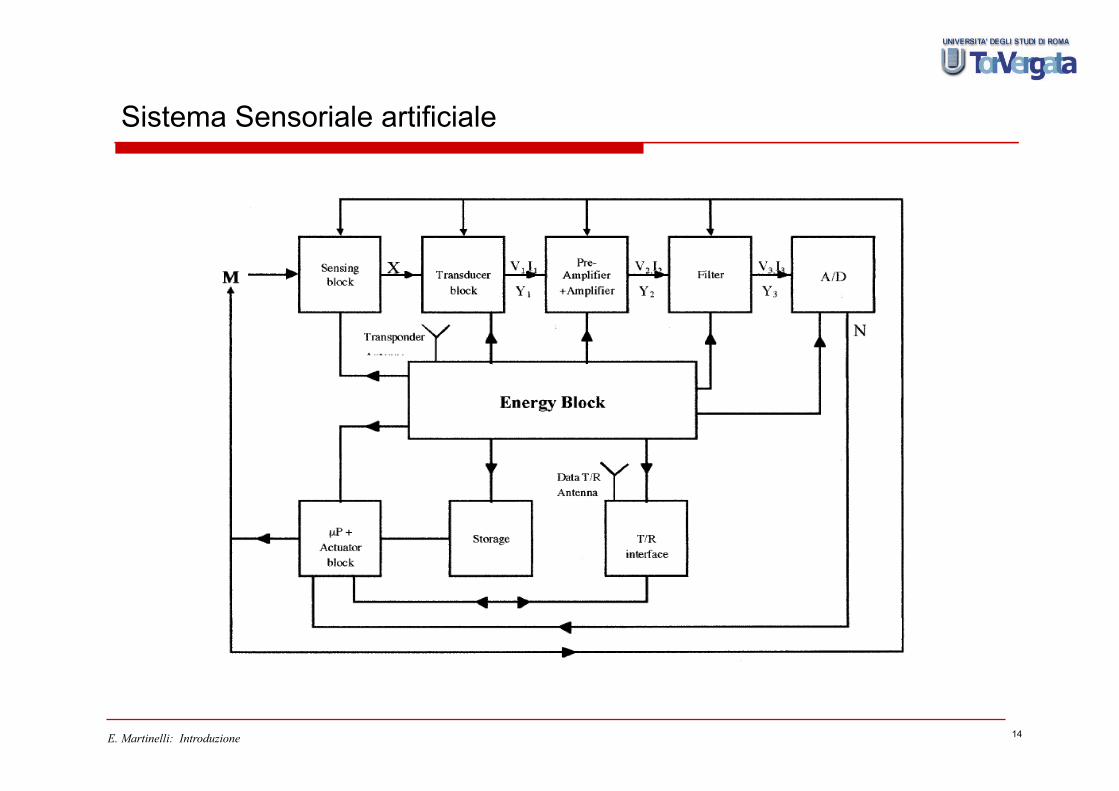
Sistema Sensoriale artificiale
E. Martinelli: Introduzione 15
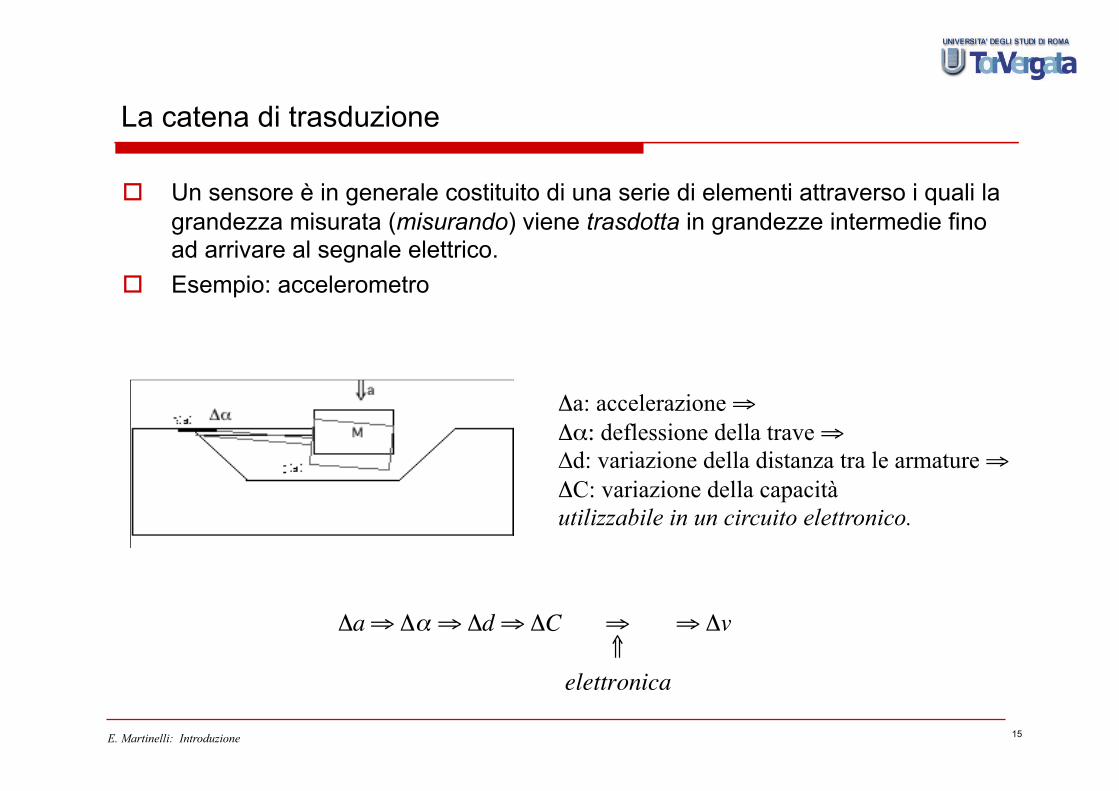
La catena di trasduzione
Un sensore è in generale costituito di una serie di elementi attraverso i quali la grandezza misurata (misurando) viene trasdotta in grandezze intermedie fino ad arrivare al segnale elettrico.
Esempio: accelerometro
Δa: accelerazione ⇒ Δα: deflessione della trave ⇒ ∆d: variazione della distanza tra le armature ⇒ ΔC: variazione della capacità utilizzabile in un circuito elettronico.
€
Δa⇒Δα ⇒ Δd⇒ΔC ⇒⇑
elettronica
⇒Δv
E. Martinelli: Introduzione 16
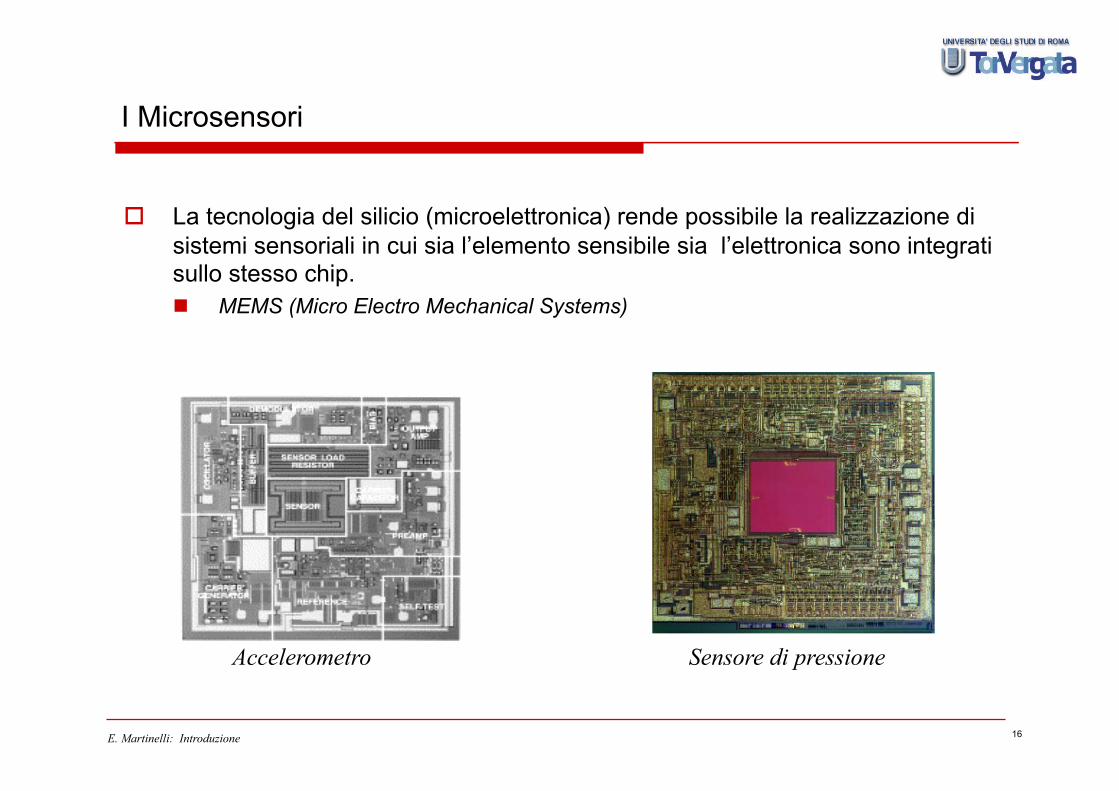
I Microsensori
La tecnologia del silicio (microelettronica) rende possibile la realizzazione di sistemi sensoriali in cui sia l’elemento sensibile sia l’elettronica sono integrati sullo stesso chip. MEMS (Micro Electro Mechanical Systems)
Accelerometro Sensore di pressione
E. Martinelli: Introduzione
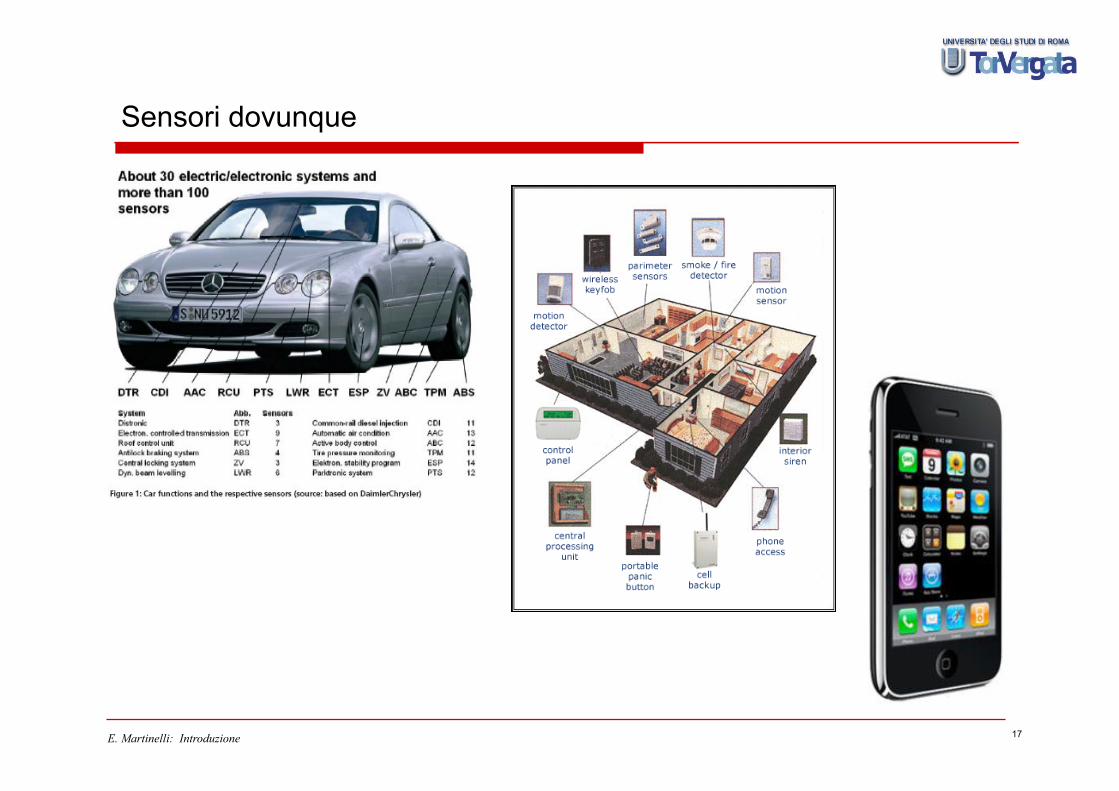
Sensori dovunque
17

E. Martinelli: Introduzione 18
Le caratteristiche dinamiche dei sensori
La risposta del sensore nei confronti del misurando può essere istantanea oppure ritardata in base al meccanismo di funzionamento del sensore.
Sensori di ordine zero La risposta del sensore è istantanea
sensori di posizione Sensori del primo ordine
La risposta del sensore è data dall’equilibrio tra un elemento che accumula energia ed un elemento che la dissipa
sensori di temperatura Sensori del secondo ordine
La risposta del sensore è data dall’equilibrio tra due elementi che accumulano energia e due elementi che la dissipano
sensori di accelerazione
tempo
mis
uran
do
tempo
sega
nle
tempo
sega
nle
tempo
sega
nle
sollecitazione
Sensore di ordine zero
sensore di ordine uno
sensore di ordine due
dinamica statica risposta

E. Martinelli: Introduzione
Differenti risposte in frequenza
19
Ordine zero
€
segnalemisurando
€
Log ω
€
segnalemisurando
€
Log ω
€
segnalemisurando
€
Log ω
Ordine uno
Ordine due
€
V t( ) = k ⋅ M t( ) V s( )M s( )
= k
€
V t( ) = a1 ⋅dM t( )
dt+ a0 ⋅ M t( )
V s( )M s( )
=1a0
⋅1
1+ s a1
a0
€
V t( ) = a2 ⋅d 2 M t( )
dt 2 + a1 ⋅dM t( )
dt+ a0 ⋅ M t( )
V s( )M s( )
=k ⋅ω0
2
s2 + 2 ⋅ ξ ⋅ω0 ⋅ s +ω02 ;
k =1a0
; ξ =a1
2⋅ a0 ⋅ a2 ; ω0 =
a0
a2
E. Martinelli: Introduzione 20
Le caratteristiche statiche la risposta del sensore (feature extraction)
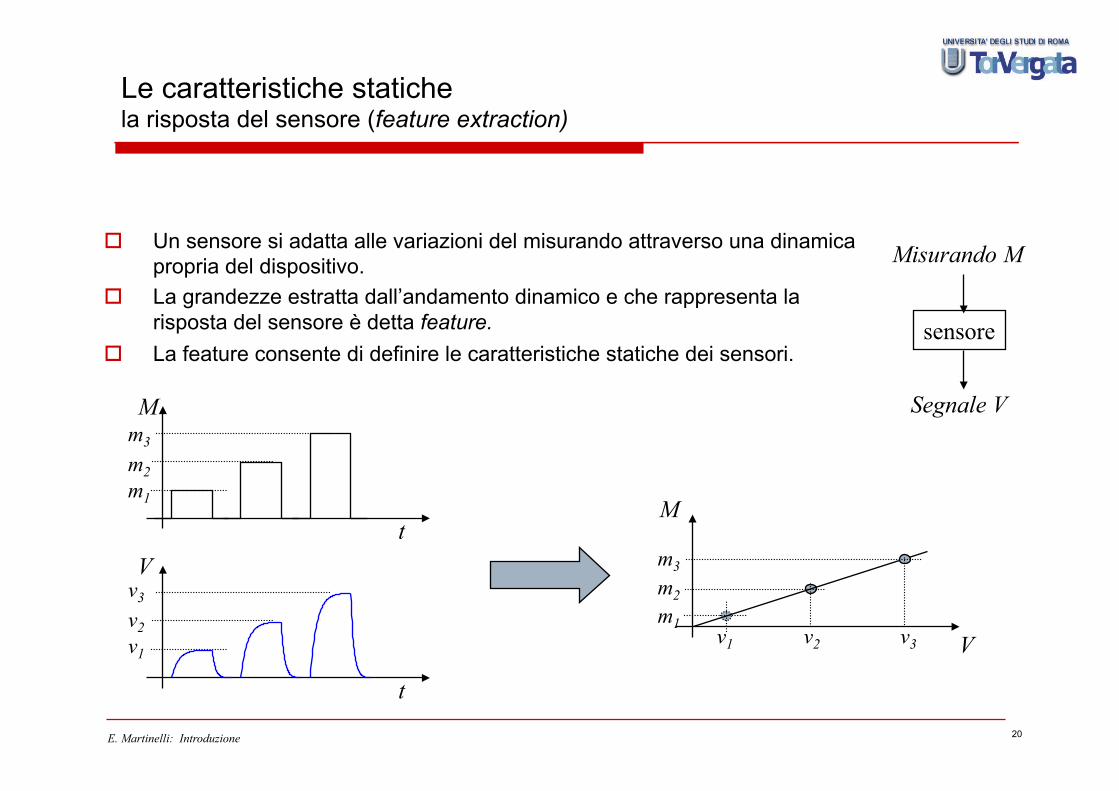
Un sensore si adatta alle variazioni del misurando attraverso una dinamica propria del dispositivo.
La grandezze estratta dall’andamento dinamico e che rappresenta la risposta del sensore è detta feature.
La feature consente di definire le caratteristiche statiche dei sensori. sensore
Misurando M
Segnale V M
m1 m2 m3
t V
v1 v2 v3
t
m1 m2 m3
V
M
v1 v2 v3
E. Martinelli: Introduzione 21
I parametri caratteristici dei sensori: La curva di risposta
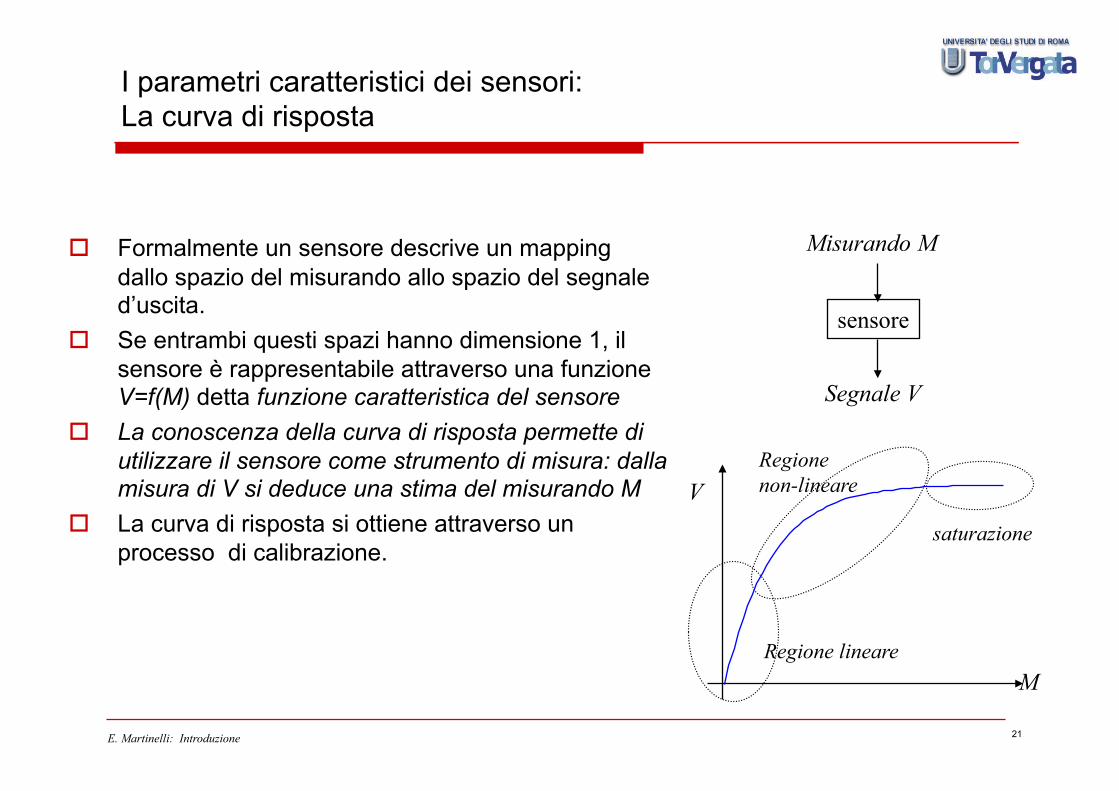
Formalmente un sensore descrive un mapping dallo spazio del misurando allo spazio del segnale d’uscita.
Se entrambi questi spazi hanno dimensione 1, il sensore è rappresentabile attraverso una funzione V=f(M) detta funzione caratteristica del sensore
La conoscenza della curva di risposta permette di utilizzare il sensore come strumento di misura: dalla misura di V si deduce una stima del misurando M
La curva di risposta si ottiene attraverso un processo di calibrazione.
sensore
Misurando M
Segnale V
M
V
Regione lineare
Regione non-lineare
saturazione

E. Martinelli: Introduzione 22
I parametri caratteristici dei sensori: Reversibilità
La reversibilità esprime la capacità del sensore di seguire, con una dinamica tipica, le variazioni del misurando.
Un sensore è detto reversibile se al cessare della sollecitazione del misurando la risposta si annulla.
M
t
V
t
Reversibile Integrale
“dosimetro” mono-uso
“disposable”
t
Reversibilità “con memoria”
V
t t
t
t
M M M
t
E. Martinelli: Introduzione 23
B
MISURANDO
SENS
IBILIT
A' DE
L SEN
SORE
B
MISURANDO
SEGN
ALE D
EL SE
NSOR
E
I parametri caratteristici dei sensori: Sensibilità
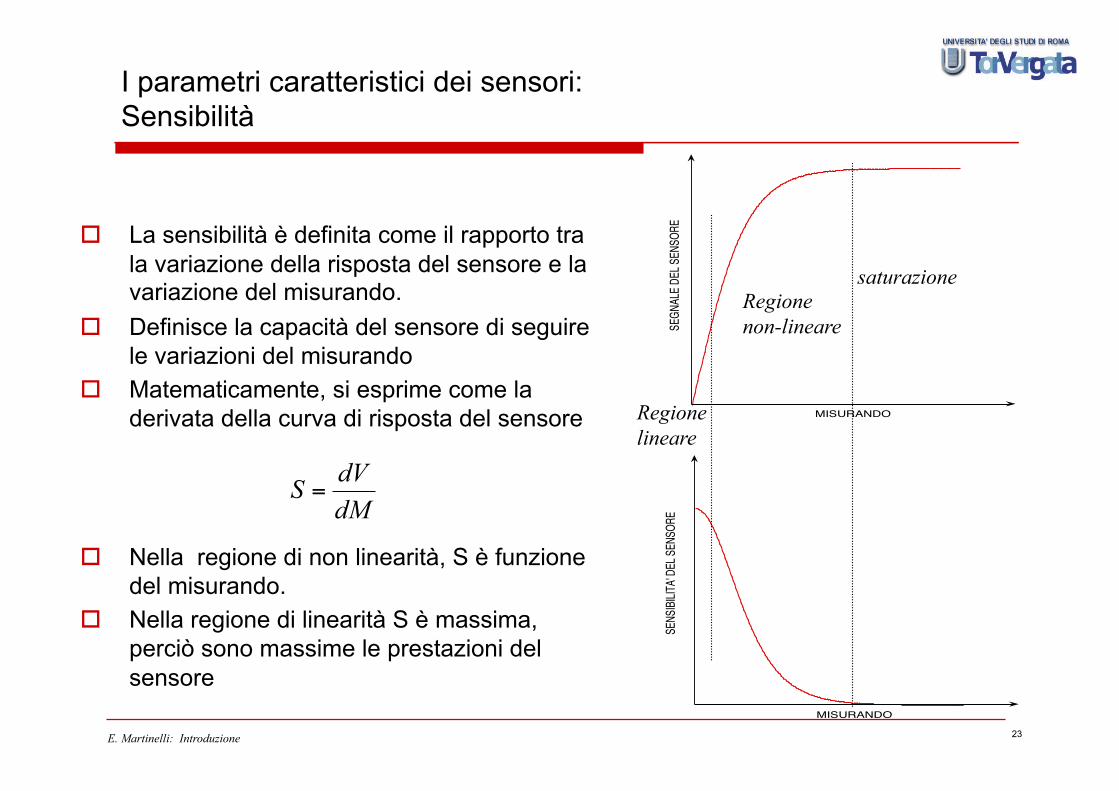
La sensibilità è definita come il rapporto tra la variazione della risposta del sensore e la variazione del misurando.
Definisce la capacità del sensore di seguire le variazioni del misurando
Matematicamente, si esprime come la derivata della curva di risposta del sensore
Nella regione di non linearità, S è funzione del misurando.
Nella regione di linearità S è massima, perciò sono massime le prestazioni del sensore
€
S =dVdM
Regione lineare
Regione non-lineare
saturazione

E. Martinelli: Introduzione 24
Sensibilità Globale
Sensore primario
trasduttore amplificatore filtro A/D conv M N
Sensore minimo
X Vout Va Vf
Ognuno dei blocchi è caratterizzato da una sua funzione caratteristica che lega l’uscita all’ingresso e quindi da una sensibilità.
€
N = f AD v f( ) = f AD f f vA( )( ) = f AD f f f A vout( )( )( ) = f AD f f f A fs M( )( )( )( )
€
S =dNdM
=d
dMf AD f f f A fs M( )( )( )( )
condizionamento
Sensore

E. Martinelli: Introduzione 25
Esempio: Sensibilità di un Sensore resistivo di temperatura (Termistore)
RT(Τ)
I
A +
- V1
€
S =∂V2
∂T=∂V2
∂V1
⋅∂Vi
∂R⋅∂R∂T
= Si ⋅ ST ⋅ SA
S = A ⋅ I ⋅α ⋅ Ro
S = S jj∏
V2
∆T ⇒ ∆R ⇒ ∆V1 ⇒ ∆V2
€
RT T( ) = Ro 1 +αT( );
V1 = RT T( ) ⋅ I
V2 = A ⋅V1
E. Martinelli: Introduzione 26
Gli errori di misura
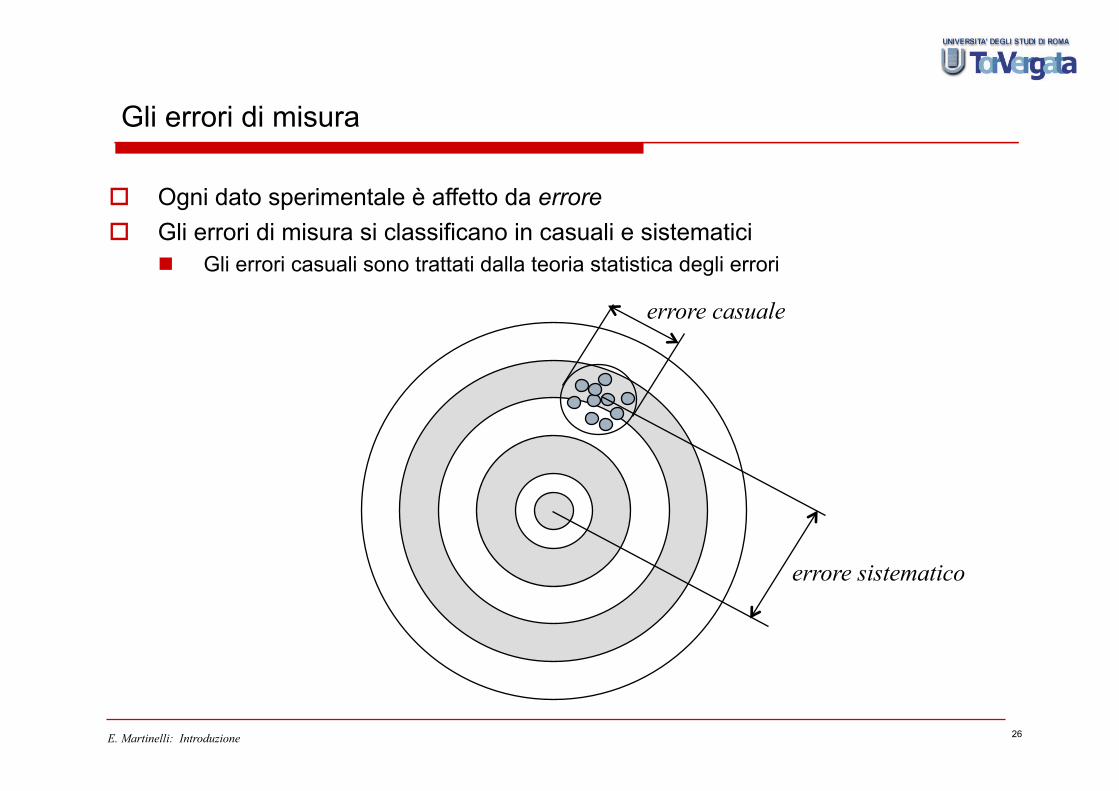
Ogni dato sperimentale è affetto da errore Gli errori di misura si classificano in casuali e sistematici
Gli errori casuali sono trattati dalla teoria statistica degli errori
errore casuale
errore sistematico
E. Martinelli: Introduzione
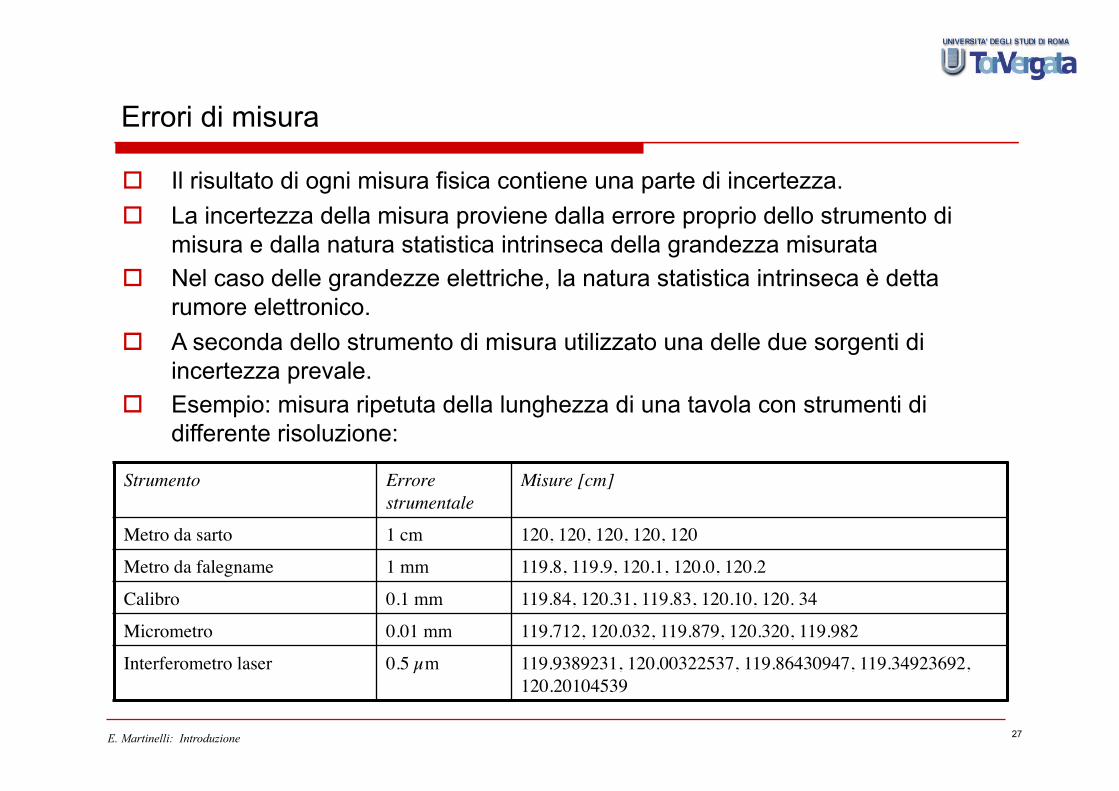
Errori di misura
Il risultato di ogni misura fisica contiene una parte di incertezza. La incertezza della misura proviene dalla errore proprio dello strumento di
misura e dalla natura statistica intrinseca della grandezza misurata Nel caso delle grandezze elettriche, la natura statistica intrinseca è detta
rumore elettronico. A seconda dello strumento di misura utilizzato una delle due sorgenti di
incertezza prevale. Esempio: misura ripetuta della lunghezza di una tavola con strumenti di
differente risoluzione:
27
Strumento Errore strumentale
Misure [cm]
Metro da sarto 1 cm 120, 120, 120, 120, 120
Metro da falegname 1 mm 119.8, 119.9, 120.1, 120.0, 120.2
Calibro 0.1 mm 119.84, 120.31, 119.83, 120.10, 120. 34
Micrometro 0.01 mm 119.712, 120.032, 119.879, 120.320, 119.982
Interferometro laser 0.5 µm 119.9389231, 120.00322537, 119.86430947, 119.34923692, 120.20104539
E. Martinelli: Introduzione
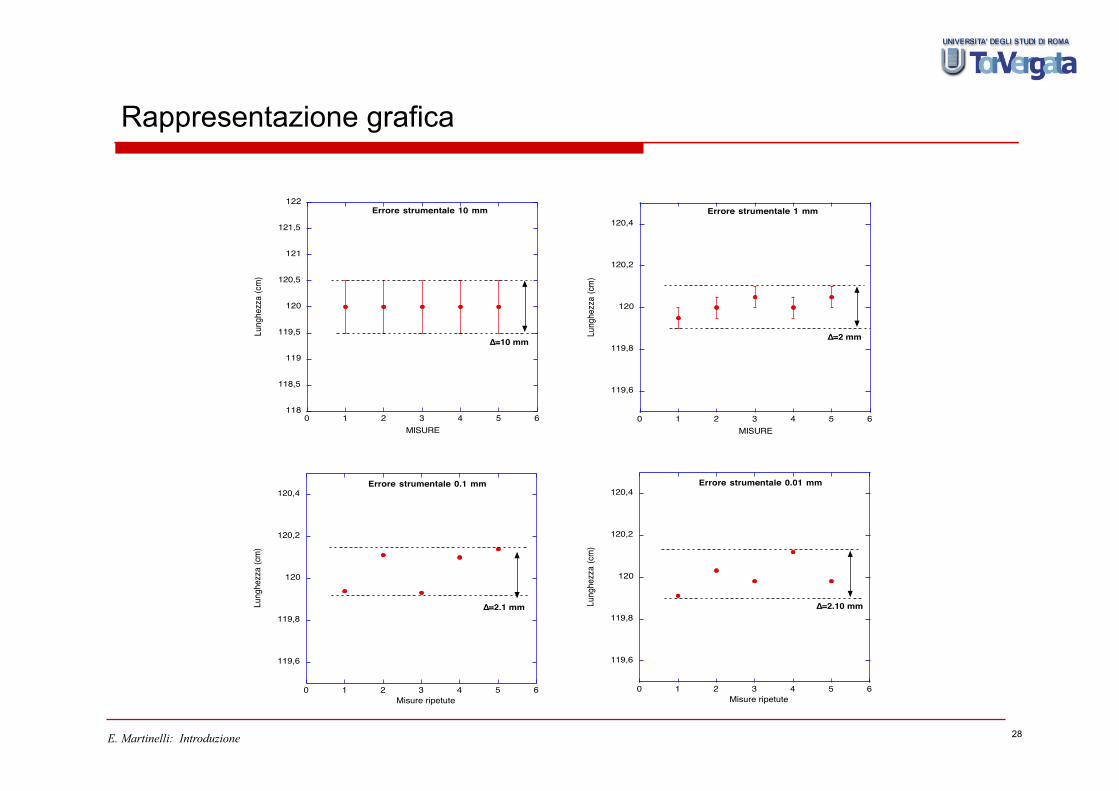
Rappresentazione grafica
28
118
118,5
119
119,5
120
120,5
121
121,5
122
0 1 2 3 4 5 6
Errore strumentale 10 mm
Lung
hezz
a (c
m)
MISURE
∆=10 mm
119,6
119,8
120
120,2
120,4
0 1 2 3 4 5 6
Errore strumentale 1 mm
Lung
hezz
a (c
m)
MISURE
∆=2 mm
119,6
119,8
120
120,2
120,4
0 1 2 3 4 5 6
Errore strumentale 0.01 mm
Lung
hezz
a (c
m)
Misure ripetute
∆=2.10 mm
119,6
119,8
120
120,2
120,4
0 1 2 3 4 5 6
Errore strumentale 0.1 mm
Lung
hezz
a (c
m)
Misure ripetute
∆=2.1 mm
E. Martinelli: Introduzione 29
I parametri caratteristici dei sensori: Accuratezza e Riproducibilità
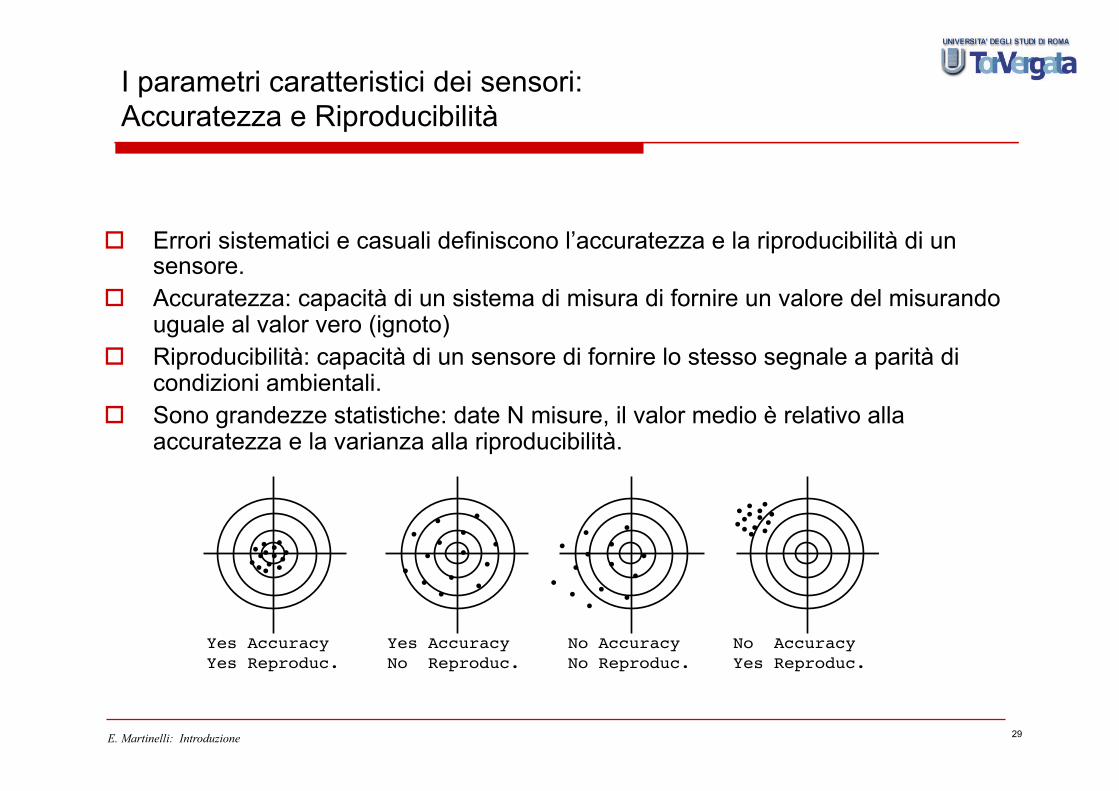
Errori sistematici e casuali definiscono l’accuratezza e la riproducibilità di un sensore.
Accuratezza: capacità di un sistema di misura di fornire un valore del misurando uguale al valor vero (ignoto)
Riproducibilità: capacità di un sensore di fornire lo stesso segnale a parità di condizioni ambientali.
Sono grandezze statistiche: date N misure, il valor medio è relativo alla accuratezza e la varianza alla riproducibilità.
•• • •
• •
•
•
••
•
•
••
•• • •• ••
•• •
•••• •
• • •
• •
•
•
••
•
•
••
•• • •• ••
•• •
••
••
Yes AccuracyNo Reproduc.
Yes AccuracyYes Reproduc.
No AccuracyYes Reproduc.
No AccuracyNo Reproduc.
Figure 2: Pictorical representation of the definitions of accuracy and reproducibility
E. Martinelli: Introduzione 30
I parametri caratteristici dei sensori: Risoluzione
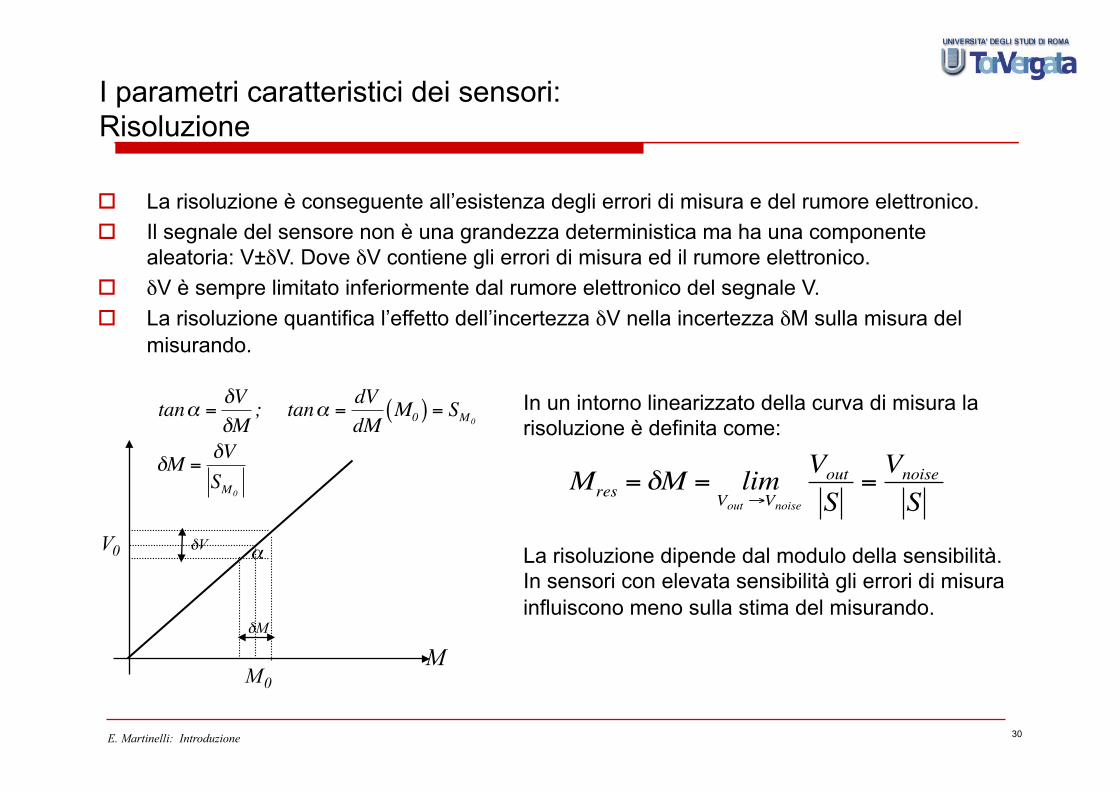
La risoluzione è conseguente all’esistenza degli errori di misura e del rumore elettronico. Il segnale del sensore non è una grandezza deterministica ma ha una componente
aleatoria: V±δV. Dove δV contiene gli errori di misura ed il rumore elettronico. δV è sempre limitato inferiormente dal rumore elettronico del segnale V. La risoluzione quantifica l’effetto dell’incertezza δV nella incertezza δM sulla misura del
misurando.
M
€
tanα =δVδM
; tanα =dVdM
M0( ) = SM 0
δM =δVSM 0
In un intorno linearizzato della curva di misura la risoluzione è definita come:
La risoluzione dipende dal modulo della sensibilità. In sensori con elevata sensibilità gli errori di misura influiscono meno sulla stima del misurando.
€
Mres = δM = limVout →Vnoise
Vout
S=Vnoise
S
€
V0
€
M0
€
δV
€
δM€
α

E. Martinelli: Introduzione 31
I parametri caratteristici dei sensori: Limite di rivelazione
La risoluzione calcolata per un segnale uguale a 0, definisce il limit of detection (LOD) del sensore.
La definizione traduce il fatto che non può esservi misura inferiore al suo errore. Quando l’errore di misura raggiunge il suo limite inferiore, il rumore elettronico Vn, si ha il limite di rivelazione teorico per quel sensore.
Si definisce un LODconvenzionale= (3 o 9)*LOD.
M Vn
MLOD
€
tanα =dVdM
0( ) = S0
€
MLOD =Vn
SM =0
E. Martinelli: Introduzione 32
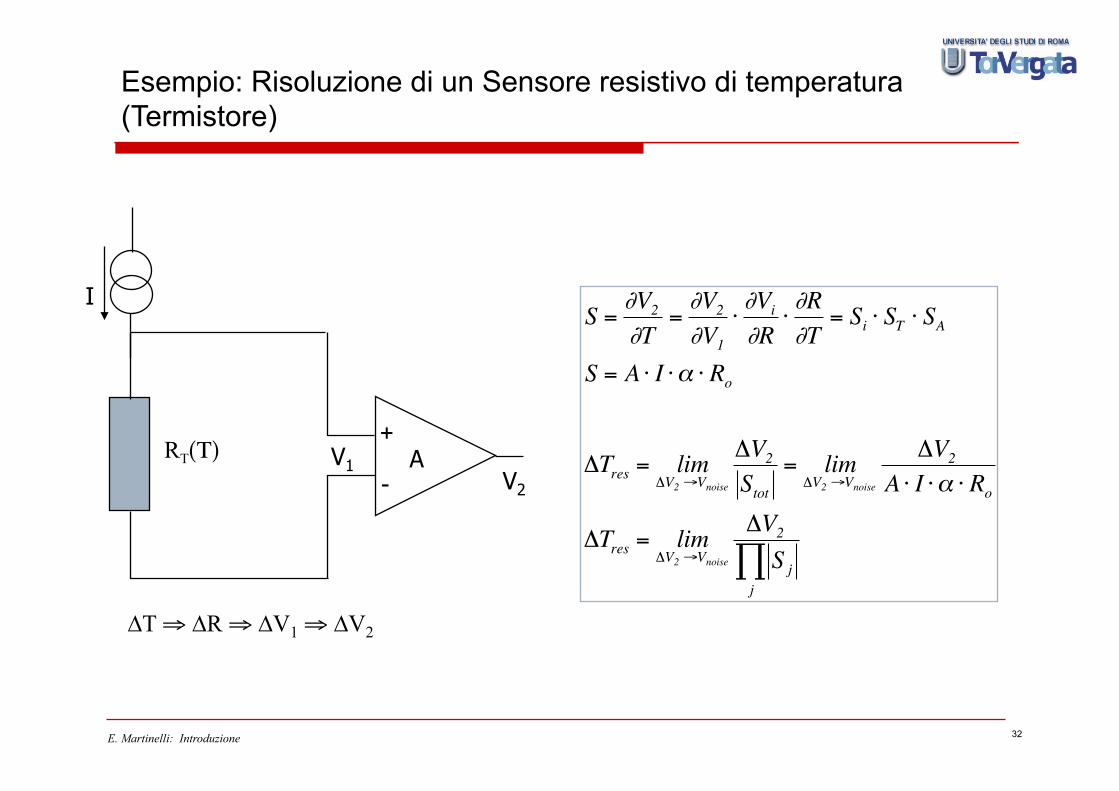
Esempio: Risoluzione di un Sensore resistivo di temperatura (Termistore)
I
A +
- V1
€
S =∂V2
∂T=∂V2
∂V1
⋅∂Vi
∂R⋅∂R∂T
= Si ⋅ ST ⋅ SA
S = A ⋅ I ⋅α ⋅ Ro
ΔTres = limΔV2 →Vnoise
ΔV2
Stot= lim
ΔV2 →Vnoise
ΔV2
A ⋅ I ⋅α ⋅ Ro
ΔTres = limΔV2 →Vnoise
ΔV2
S jj∏
V2
∆T ⇒ ∆R ⇒ ∆V1 ⇒ ∆V2
RT(Τ)

E. Martinelli: Introduzione 33
Rumore elettronico
Il rumore è la manifestazione della natura statistica dei fenomeni che regolano il passaggio di corrente.
Questo è dovuto principalmente alla natura discreta dei fenomeni elettrici. Per definizione il rumore è:
A media nulla Statisticamente definito Distribuito in frequenza A valore efficace diverso da 0.

E. Martinelli: Introduzione 34
Densità Spettrale di Rumore
La potenza è proporzionale al quadrato della tensione (rms) o della corrente (rms).
La densità spettrale di potenza di rumore è definita come:
Le densità spettrale di tensione e corrente sono definite come:
La tensione o la corrente di rumore, in una data banda di frequenza, si esprimono come:
€
pn =dPn
df W
Hz
€
en =dVn
2
df V
Hz
; in =
dIn2
df A
Hz
€
Vn f1 → f2[ ] = vn2df
f1
f 2
∫ V[ ]; In f1 → f2[ ] = in2df
f1
f 2
∫ A[ ];

E. Martinelli: Introduzione 35
Distribuzioni spettrali dei Rumori caratteristici
Sv(f) [V2/Hz]
log f
1/f G-R
shot
termico
-20dB/dec -40dB/dec
€
termico : S f( ) = 4kTR
shot : S f( ) = 2aIo
G − R : S f( ) = Koτ
1+ω2τ 2
flicker : S f( ) = K V β
f α β ≈ 2;α ≈1[ ]
rumore in eccesso
E. Martinelli: Introduzione 36
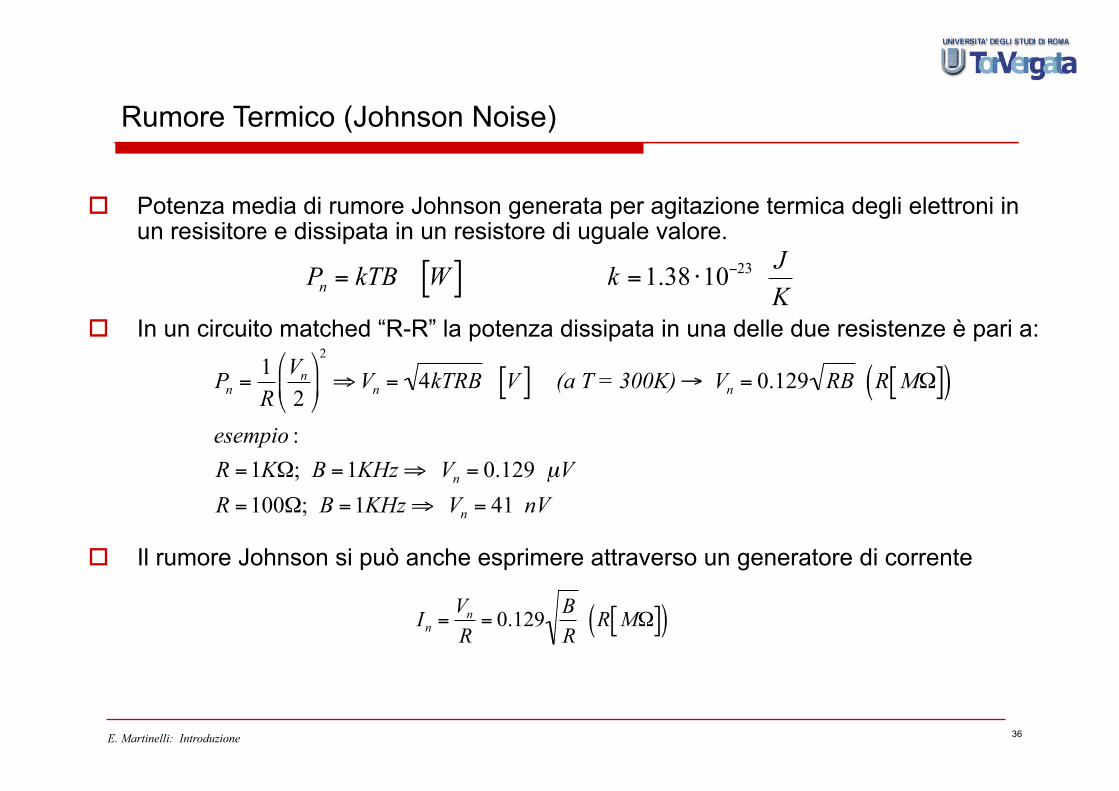
Rumore Termico (Johnson Noise)
Potenza media di rumore Johnson generata per agitazione termica degli elettroni in un resisitore e dissipata in un resistore di uguale valore.
In un circuito matched “R-R” la potenza dissipata in una delle due resistenze è pari a:
Il rumore Johnson si può anche esprimere attraverso un generatore di corrente
€
Pn = kTB W[ ] k =1.38 ⋅10−23 JK
€
Pn =1R
Vn
2
2
⇒Vn = 4kTRB V[ ] (a T = 300K)→ Vn = 0.129 RB R MΩ[ ]( )esempio :R =1KΩ; B =1KHz ⇒ Vn = 0.129 µVR =100Ω; B =1KHz ⇒ Vn = 41 nV
€
In =Vn
R= 0.129 B
R R MΩ[ ]( )
E. Martinelli: Introduzione 37
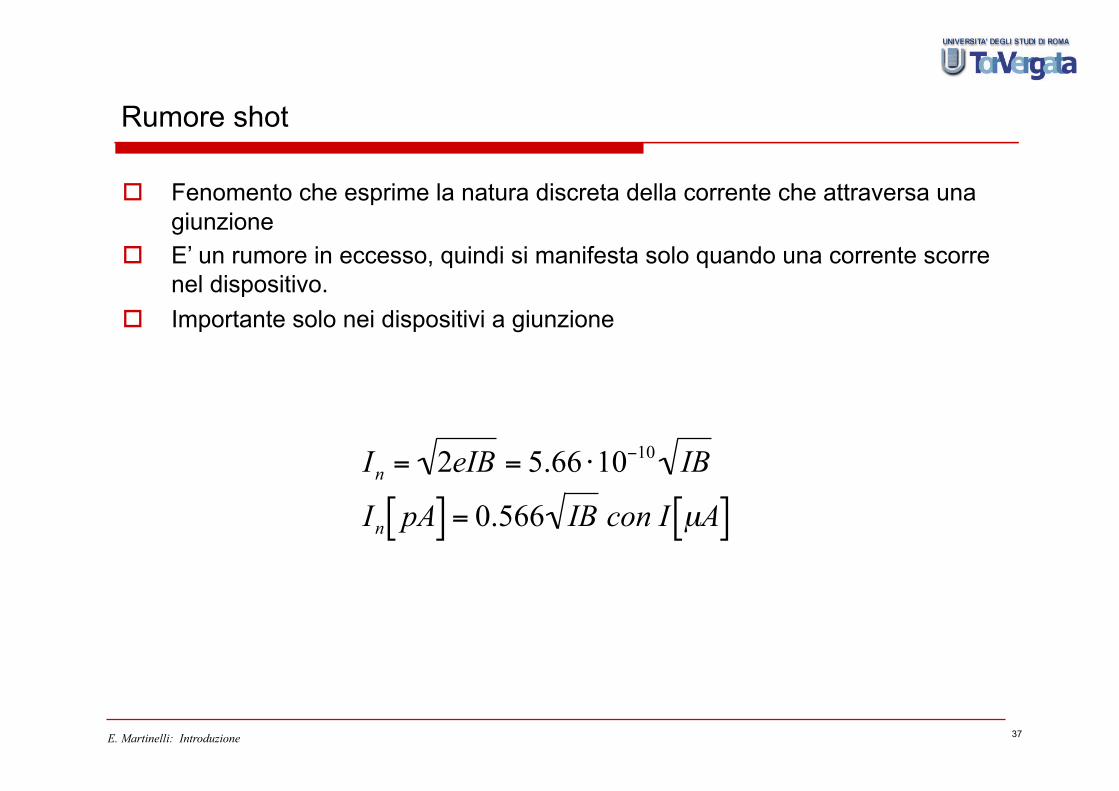
Rumore shot
Fenomento che esprime la natura discreta della corrente che attraversa una giunzione
E’ un rumore in eccesso, quindi si manifesta solo quando una corrente scorre nel dispositivo.
Importante solo nei dispositivi a giunzione
€
In = 2eIB = 5.66 ⋅10−10 IB
In pA[ ] = 0.566 IB con I µA[ ]
E. Martinelli: Introduzione 38
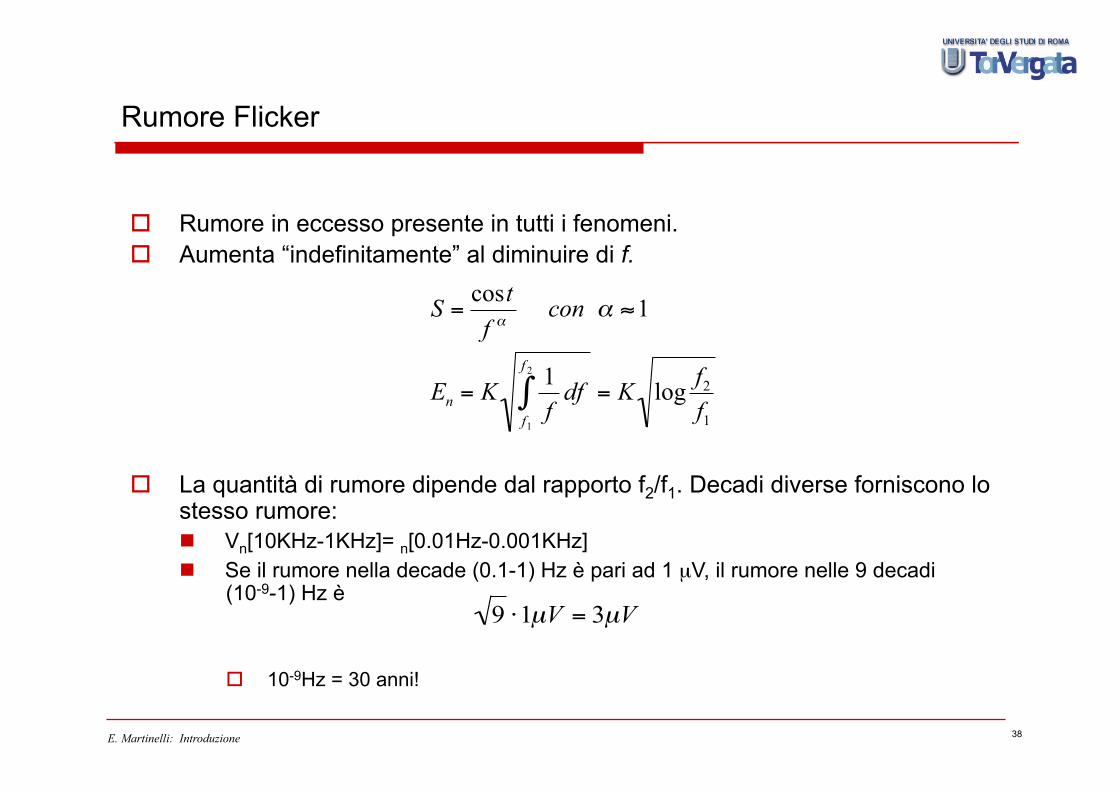
Rumore Flicker
Rumore in eccesso presente in tutti i fenomeni. Aumenta “indefinitamente” al diminuire di f.
La quantità di rumore dipende dal rapporto f2/f1. Decadi diverse forniscono lo stesso rumore: Vn[10KHz-1KHz]= n[0.01Hz-0.001KHz] Se il rumore nella decade (0.1-1) Hz è pari ad 1 µV, il rumore nelle 9 decadi
(10-9-1) Hz è
10-9Hz = 30 anni!
€
S =costf α
con α ≈1
En = K 1f
dff1
f 2
∫ = K log f2
f1
€
9 ⋅1µV = 3µV
E. Martinelli: Introduzione 39
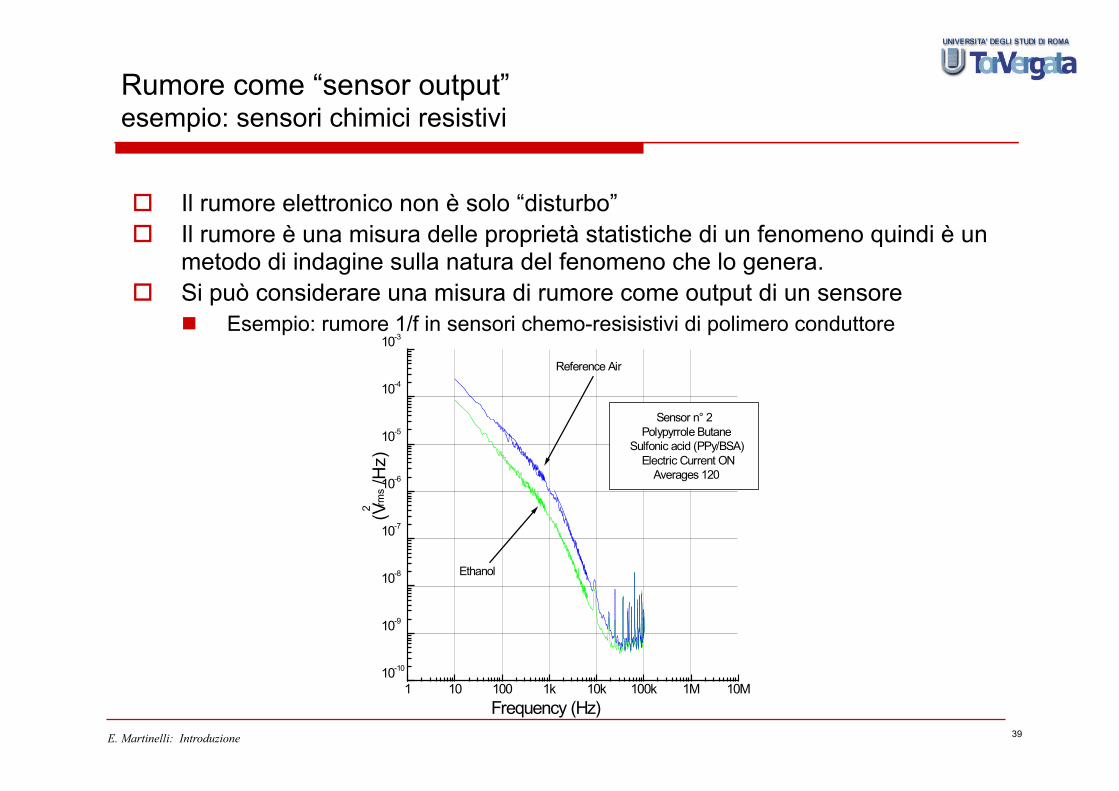
Rumore come “sensor output” esempio: sensori chimici resistivi
Il rumore elettronico non è solo “disturbo” Il rumore è una misura delle proprietà statistiche di un fenomeno quindi è un
metodo di indagine sulla natura del fenomeno che lo genera. Si può considerare una misura di rumore come output di un sensore
Esempio: rumore 1/f in sensori chemo-resisistivi di polimero conduttore
1 10 100 1k 10k 100k 1M 10M10-10
10-9
10-8
10-7
10-6
10-5
10-4
10-3
Ethanol
Reference Air
Sensor n° 2 Polypyrrole Butane Sulfonic acid (PPy/BSA) Electric Current ON Averages 120
(V2 rms/H
z)
Frequency (Hz)
E. Martinelli: Introduzione 40
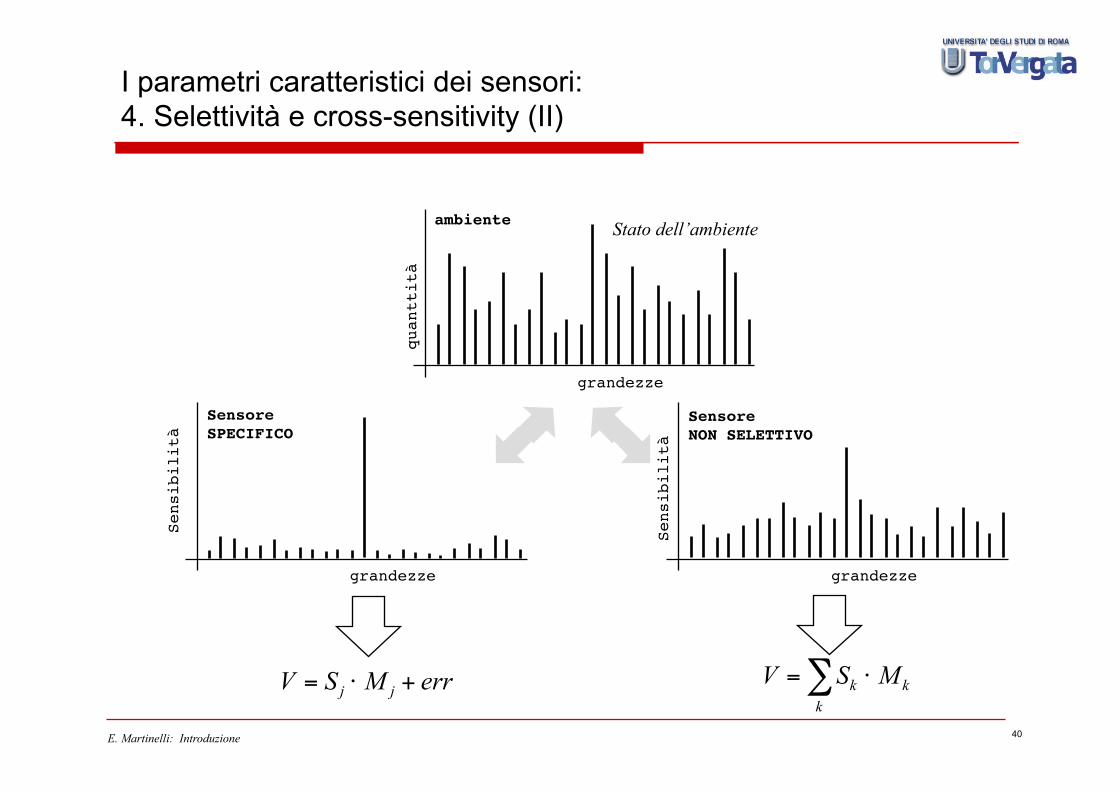
I parametri caratteristici dei sensori: 4. Selettività e cross-sensitivity (II)
grandezze
Sensibilità Sensore
SPECIFICO
grandezze
Sensibilità
Sensore NON SELETTIVO
ambiente
grandezze
quanttità
Stato dell’ambiente
€
V = S j ⋅ M j + err
€
V = Sk ⋅ M kk∑

E. Martinelli: Introduzione 41
I parametri caratteristici dei sensori: Drift
Variazione temporale delle caratteristiche del sensore. La curva di risposta si modifica col tempo per cui, nella stima del misurando si
introduce un errore variabile (in genere cresce col tempo). Il drift è legato al tempo di vita della calibrazione del sensore, cioè dopo quanto
tempo usare la stessa curva di risposta da luogo ad errori sul misurando non tollerabili.
M
V
Mm Mv Mv
t0 t1
t2
E. Martinelli: Introduzione 42
Esempio di un sensore reale accelerometro ADXL50A
Curva di risposta
Sensibilità
Range dinamico Il range dinamico stabilisce il range di linearità entro il quale cioè la
sensibilità si mantiene costante, quindi le caratteristiche del sensore sono costanti. Tale range è ± 50 g. S
€
V a( ) = V0 + a ⋅K V0 = 1.8V ; K = 0.019 Vg
€
a =V − 1.80.019
g
€
S =dVda
= K S = 19 mVg
E. Martinelli: Introduzione 43
Rumore La densità di rumore bianco del sensore è
Se ad esempio il segnale è filtrato da un filtro passa basso con frequenza di taglio 10 Hz, il valore quadratico medio (rms) del rumore sarebbe
Risoluzione
in una misura reale in cui il segnale è filtrato da un filtro passa basso con frequenza di taglio 10 Hz si otterrebbe una risoluzione pari a 20 mg.
Esempio di un sensore reale accelerometro ADXL50A
€
125 µVHz
€
Vnoise , rms = 125 µVHz
⋅ 10Hz = 395µV
€
ares =VnS
=125 µV
Hz
19 mVg
= 6.6 mgHz
1 mg =10-3 g=0.0098 m/s2
Recommended

















