Embed Size (px)
DESCRIPTION
One of the key challenges for research in wireless sensor networks is the development of routing protocols that provide application-specific service guarantees. This paper presents a new cluster-based Route Optimisation and Load-balancing protocol, called ROL, that uses various quality of service (QoS) metrics to meet application requirements. ROL combines several application requirements, specifically it attempts to provide an inclusive solution to prolong network life, provide timely message delivery and improve network robustness. It uses a combination of routing metrics that can be configured according to the priorities of user-level applications to improve overall network performance. To this end, an optimisation tool for balancing the communication resources for the constraints and priorities of user applications has been developed and Nutrient-flow-based Distributed Clustering (NDC), an algorithm for load balancing is proposed. NDC works seamlessly with any clustering algorithm to equalise, as far as possible, the diameter and the membership of clusters. This paper presents simulation results to show that ROL/NDC gives a higher network lifetime than other similar schemes, such Mires++. In simulation, ROL/NDC maintains a maximum of 7\% variation from the optimal cluster population, reduces the total number of set-up messages by up to 60%, reduces the end-to-end delay by up to 56%, and enhances the data delivery ratio by up to 0.98% compared to Mires++.
Citation preview

Information Fusion xxx (2013) xxx–xxx
Contents lists available at SciVerse ScienceDirect
Information Fusion
journal homepage: www.elsevier .com/locate / inf fus
Full Length Article
Adaptive routing in wireless sensor networks: QoS optimisation for enhancedapplication performance
Mohammad Hammoudeh a,⇑, Robert Newman b
a Manchester Metropolitan University, Chester Street, Manchester M1 5GD, UKb University of Wolverhampton, Wulfruna Street, Wolverhampton WV1 1LY, UK
a r t i c l e i n f o a b s t r a c t
Article history:Available online xxxx
Keywords:Wireless sensor networksRoutingDistributed clusteringQuality of serviceOptimisationAdaptiveLoad-balancingApplication performance
1566-2535/$ - see front matter � 2013 Elsevier B.V. Ahttp://dx.doi.org/10.1016/j.inffus.2013.02.005
⇑ Corresponding author.E-mail addresses: [email protected] (M
wlv.ac.uk (R. Newman).
Please cite this article in press as: M. Hammoudperformance, Informat. Fusion (2013), http://dx
One of the key challenges for research in wireless sensor networks is the development of routing proto-cols that provide application-specific service guarantees. This paper presents a new cluster-based RouteOptimisation and Load-balancing protocol, called ROL, that uses various Quality of Service (QoS) metricsto meet application requirements. ROL combines several application requirements, specifically itattempts to provide an inclusive solution to prolong network life, provide timely message delivery andimprove network robustness. It uses a combination of routing metrics that can be configured accordingto the priorities of user-level applications to improve overall network performance. To this end, an opti-misation tool for balancing the communication resources for the constraints and priorities of user appli-cations has been developed and Nutrient-flow-based Distributed Clustering (NDC), an algorithm for loadbalancing is proposed. NDC works seamlessly with any clustering algorithm to equalise, as far as possible,the diameter and the membership of clusters. This paper presents simulation results to show that ROL/NDC gives a higher network lifetime than other similar schemes, such Mires++. In simulation, ROL/NDCmaintains a maximum of 7% variation from the optimal cluster population, reduces the total number ofset-up messages by up to 60%, reduces the end-to-end delay by up to 56%, and enhances the data deliveryratio by up to 0.98% compared to Mires++.
� 2013 Elsevier B.V. All rights reserved.
1. Introduction
Wireless Sensor Networks (WSNs) hold a lot of promise inapplications where gathering sensed data in remote or inaccessiblelocations is required. The stream nature of the gathered data, thelimited resources, and the distributed nature of WSNs bring newchallenges for data routing techniques that need to be addressed.Since communication is often the most expensive operation for asensor node, the applications underlying data communication par-adigm must be energy efficient.
In WSNs, routing protocols are application dependent and theirdesign goals vary among different applications. For instance, manyapplications require real-time communication, e.g., a fire fightermay rely on timely temperature updates to remain aware of thecurrent fire conditions whereas a soil monitoring system may onlyneed to report measurements every few hours. Therefore, routingprotocols must meet the delay requirements at minimum energycost. Hence, routing protocol designers have to consider the char-acteristics of sensor nodes along with the application and architec-tural requirements. Many routing protocols have been proposed in
ll rights reserved.
. Hammoudeh), R.Newman@
eh, R. Newman, Adaptive routin.doi.org/10.1016/j.inffus.2013.0
the literature, although the performance of these protocols ispromising in terms of energy efficiency, most of them come withno guarantee of Quality of Service (QoS) required by real-timeand communication-heavy applications. As discussed in Section 2,a protocol that balances, as far as possible the following character-istics is needed: energy efficiency, scalability, robustness, and pro-vision of timeliness.
To address these requirements, a new protocol called RouteOptimisation and Load-balancing (ROL) is proposed. Compared toLEACH [1] and Mires++ [2], this protocol reduces the cost and num-ber of setup messages, and thus extends the network life. ROL im-proves on the robustness of LEACH and Mires by ensuring that eachnode learns multiple paths to its Cluster Head (CH) and by theelecting of CH backup node(s). Energy expenditure is further re-duced by shortening the distance between the node and its CH.This is done by incorporating a hop count metric in addition tothe transmission backoff delay. Load balancing is achieved at twolevels: (1) Network level, through traffic multiplexing over multi-ple paths; (2) Cluster level, by rotation of the CHs.
This paper proceeds as follows. Section 2 introduces hierarchi-cal routing in WSNs. Section 3 outlines the objectives and motiva-tion for a new clustering protocol. In Section 4, is the mainexposition of the ROL, it explains different phases in the clusteringprocess. In Section 5, NDC is described. In Section 6, the evaluation
g in wireless sensor networks: QoS optimisation for enhanced application2.005

2 M. Hammoudeh, R. Newman / Information Fusion xxx (2013) xxx–xxx
metrics for the ROL/NDC are defined. In Section 7, the simulationresults of ROL/NDC are presented. Finally, conclusions are drawnand further work suggested.
Table 1Characteristics of existing hierarchical routing protocols.
Protocol Heuristic Sink centralised Depth limited Application limited
LEACH No No Yes YesHEED Yes No Yes YesMESTER No Yes No YesMires++ No Yes Yes Yes
2. Hierarchical routing in WSNs
Routing has proved to be a key issue in WSNs research. In theliterature, a lot of the effort has been devoted to routing protocolssince they differ depending on the nature of user applications andon the architecture of the underlying network. As clustering ap-proaches are particularly tempting for large-scale high-densityWSN applications, a solution for clustering with ad hoc wirelesscommunications is sought. Hierarchical routing is a two or moretier routing scheme. Nodes in the upper tier are called CHs andact as a routing backbone, while nodes in the lower tier performsensing tasks. Kulkarni et al. [3] argue that multi-tier networksare scalable and offer the following number of advantages over sin-gle-tier networks: lower cost, better coverage, higher functionality,and better reliability.
Many clustering algorithms have been previously investigated,both independently and in the context of routing protocols. In thissection, we briefly review some clustering protocols used in thispaper. We refer the interested reader to [4,5] and references therein for a comprehensive survey of recent clustering algorithms.
LEACH [1] is one of the first clustering-based protocols that uti-lises randomised rotation of the CH role to evenly distribute theenergy load among nodes in the network. LEACH is well-suitedfor applications where constant monitoring is needed and data col-lection occurs periodically to a centralised location. LEACH hasbeen based on a number of assumptions which in the authors’opinion limit its effectiveness in a number of applications, suchas single hop communication.
Smaragdakis et al. [6] address the issue of heterogeneity ofnodes in terms of their energy. The development of their protocolwas motivated by applications that would benefit from realisingthe effect of nodes heterogeneity, e.g., re-energisation of WSNsand applications where the spatial density of sensors is a con-straint. This protocol assumes that the sink can be reached directlyby all nodes. It requires knowledge of the energy levels of othernodes in the network to weight the CH election probabilities,which requires extra communication overhead.
In [7], the authors proposed a protocol called HEED for sensorapplications requiring efficient data aggregation. HEED producesbalanced clusters with low message overhead using informationabout residual energy and a second parameter such as node degree.HEED out-performs generic clustering protocols on various factorsincluding energy efficiency. However, HEED is still heuristic in nat-ure and suffers a high network delay due to the complexity of theCH selection algorithm. Besides which, HEED provides only a twolevel hierarchy.
Unlike previous work targeting the optimisation of energy effi-ciency and network lifetime, Yang et al. [8] proposed Minimum En-ergy Spanning Tree for Efficient Routing (MESTER) for maintaininghigh quality in data collection for as long as possible. The design ofMESTER is predicated on the idea that the sink or network control-ler is more powerful than the nodes, which are seen as having verylimited resources. MESTER therefore adopts centralised algorithmsand requires the sink to take control of managing the networktopology and calculating the routing path and time schedule fordata collection. This results in it being intrinsically non-scalable– or scalable according to the capacity of the sink, and dependenton the reliability of a single sink node.
Mires++ [2] is a clustering service on a publish/subscribe mid-dleware called Mires. It attempts to achieve energy saving, loadbalancing, and robustness. Mires++ implement two protocols: (1)
Please cite this article in press as: M. Hammoudeh, R. Newman, Adaptive routinperformance, Informat. Fusion (2013), http://dx.doi.org/10.1016/j.inffus.2013.0
Creates two tier flat clusters based on residual energy and sub-scribed data topics. (2) Performs load balancing by rotating theCH role and setting a maximum cluster size. It also elects a backupCH to achieve fault tolerance. Mires++ inherits all features of Miresmiddleware, including its drawbacks. Publish/subscribe is initiatedcentrally at the sink, which introduces a single point of failure,communication bottlenecks, and incurs high communication costs.Usually, nodes are deployed to achieve a common sensing task;therefore, all nodes are likely to subscribe in the same data topic,which reduces the usefulness of its clustering. Finally, physicallocation awareness is an important condition in Mires++ clustering,which limits its applicability. We compare ROL/NDC performancewith that of Mires++ as they both aim to achieve the same goal.
LEACH, and its derivatives, have been successful in reducing theenergy per bit required by each node and the network as a whole.Nonetheless, most of these protocols are built upon inflexibleassumptions and have serious drawbacks. Many clustering algo-rithms are heuristic in nature and have a time complexity ofO(n), e.g., [9], where n is the total number of nodes in the network.Also other protocols, such as [6], demand time synchronisationamong nodes, which makes them unsuitable for large-scale net-works. Another set of protocols requires centralised managementwhich limits their scalability. Some of these protocols have beendesigned with robustness in mind, however, the level of fault tol-erance is usually designed to adapt to occasional node failuresand infrequent topology migration.
The characteristics of the protocols discussed above are summa-rised in Table 1.
In summary, it is evident that the desired qualities of a routingprotocol are largely determined by the characteristics of the appli-cations they serve. Most of the reviewed clustering protocols areapplication specific. Such protocols require profound modificationsto be flexible enough to meet the diversity of functional and non-functional requirements placed on them by applications. There-fore, application requirements combined with the sparse memoryand processing resources of a typical node have great impact onchoosing a suitable routing protocol. As more WSNs softwareapplications are deployed and the diversity of sensor devices in-creases, there is significant value in developing a routing protocolthat allows system developers to optimise its operation. This pro-vides a way to provide paths based on different optimisation objec-tives as specified by an objective function and the routing metrics.Thus, a routing protocol that balances as many of the following de-sign objectives is desirable:
1. Real-time: An effective protocol should provide timely commu-nication by reducing end-to-end communication delays. Timeli-ness constraints are important as WSNs often operate in thereal world to reflect the current physical status of the sensingenvironment. Data timeliness is normally at odds with energyconsumption [10]; data aggregation reduces the routing proto-col temporal performance due to the introduced aggregationdelay.
2. Reliability: A reliable and robust routing protocol is to be capa-ble of providing correct measurements at the right momentwithout interruption. Different WSN applications have variedrequirements on the reliability of data delivery, which may
g in wireless sensor networks: QoS optimisation for enhanced application2.005

Table 2Configurable ROL parameters and the applications objectives they affect.
Parameter Design objective
Backoff Energy efficiency, timelinessNum. of hops Scalability, robustness, timelinessNum. of backup CHs Robustness, data delivery ratioNum. of paths Robustness, data delivery ratio,
timeliness, energy efficiencyNDC Energy efficiency, scalability, timeliness
M. Hammoudeh, R. Newman / Information Fusion xxx (2013) xxx–xxx 3
evolve over time. For example, a WSN deployed for fire detec-tion in a forest can be used for measuring humidity as well.When the measured temperature is in the range of normal tem-perature it is delivered to the sink tolerating a certain percent-age of loss. Yet, when a fire is detected, the data should bedelivered to the sink with high priority.
3. Scalability: Scalability is the ability of the network to grow insize without excessive communication overhead. In a largerscale WSN, more overhead is unavoidable to keep the build ofthe communication paths to the sink. Routing protocols shouldsupport in-network processing, such as lossy aggregation, anddeploy localised algorithms to reduce the amount of communi-cated data to save energy and reduce bandwidth utilisation.Besides, they should be able to exploit the density of nodes insaving energy, distributing load, and correcting faults.
4. Energy consumption: Routing protocols should use resourcesefficiently to carry out data communication tasks. This is partic-ularly important for long-term deployment applications ofWSNs.
5. Load-balancing: Routing protocols should be able to distributeenergy consumption between nodes to extend network life.Distributing workload will also help to prevent energy deple-tion in one part of the network, which may result in partial cov-erage of the monitored environment.
6. Clustering requirements: Clustering should be kept fast, simple,and decentralised. The total number of clusters in the networkshould be sustained equal or around the optimal number ofclusters defined in [1], which is 5% of the total number of nodesin the network.
7. Location information: Routing protocol should be able to func-tion without node geolocation. However, it should be open toutilise location information if the application requires.
3. ROL motivation and aim
The increasing number of WSN applications, each with theirown intrinsic needs, present systems designers with softwarearchitectural challenges, both at development time and throughoutthe system life-cycle. WSN research, e.g., [11], has successfullyshown the merits of integrating application domain knowledgein system design. It is obvious that each application imposes differ-ent requirements on the routing scheme with respect to the ur-gency of timeliness, data delivery patterns, QoS, memoryconsumption, processing levels, etc. These requirements evincethat special support for accommodating routing efficiently relieson a distinctive set of requirements as it must be optimised forthe application.
As shown in Section 2, most of the existing routing protocols aredeveloped to meet application-specific design objectives andrequirements. The majority of these protocols achieve one objec-tive at the expense of others. This is likely because some objectivesare contradictory. For instance, energy saving by data aggregationintroduces considerable communication delays. Moreover, otherrouting protocols in the literature focus on achieving one or twoof these design objectives and ignore the others. For example,Chun-yan et al. [12] is routing protocols with energy efficiency asthe key design factor; Wei et al. [13] aims to handle dynamic topo-logical variation; Kumar et al. [14] aims to handle event detectionin heterogeneous networks; Tubaishat et al. [15] aims to providesecure data communication; Jawhar et al. [16] is designed for is-sues that are specifically related to topologically linear structureWSNs.
To support various computationally demanding applications forlarge-scale WSNs, such as data visualisation applications [11], arouting protocol that considers part or all of the main design objec-tives (listed in Section 2) is needed. This routing protocol is
Please cite this article in press as: M. Hammoudeh, R. Newman, Adaptive routinperformance, Informat. Fusion (2013), http://dx.doi.org/10.1016/j.inffus.2013.0
designed generically and targets a variety of application scenariosby balancing the multiple application objectives based on a globaloptimisation equation.
The motivation for developing a new routing protocol that canbe specifically optimised to a range of applications include: (1)financial as software is reused and development time decreases;(2) easier maintainability as a common routing protocol can be de-ployed across a set of different applications; (3) simpler modellingof routing requirements; (4) improved applications performance.
4. ROL operation
In this section we present the relevant details of the ROL algo-rithm and its parameters, which allow ROL to be configured. Opti-misation in ROL refers primarily to the configuration of its routingparameters, which is achieved by setting their values according toapplication priorities. Table 2 summarises the ROL parameters andtheir impact on various routing design objectives. In the following,we briefly justify the chosen parameters and their relationshipwith the specific applications:
1. Backoff: The backoff achieves energy efficiency by minimisingthe cluster setup traffic. Each node joins the nearest CH andsends it its data over the path with the minimum number ofhops; this results in lower queuing and propagation delays,reduced bandwidth utilisation, and decreased energy consump-tion. In many WSN applications, there is a logical relationshipbetween adjacent nodes, i.e. nearby nodes represent relateddata. Associating nearby nodes with a particular cluster sup-ports intelligent data aggregation/fusion, which consequentlycan reduce energy consumption and improves the quality ofextracted information [17].
2. Number of hops: Data packets are transmitted indirectly throughmulti-hops from the source node to the destination node. As thenumber of hops increase, the retransmissions become cumula-tive and successful communication becomes more unlikely[18]; the increased transmission range will inevitably causehigher interference, which results in lower throughput. Multi-hop communication can be used to avoid long range transmis-sion to reduce the transmission power. Moreover, end-to-enddelay often can be reduced by reducing the number of hops ina path. Multi-hop routing is particularly useful in large-scaleapplications, such as target tracking over large geographicregion, where data sinks cannot be reached by nodes directly.
3. Number off backup CHs: Sensor nodes can switch to backup CHswhen the current CH fails. This avoids complete re-clusteringwhen re-assigning an interrupted CH. Moving to the alternativeCH incurs short disruptive period, i.e. rapid CH healing reducesthe amount of data loss and network availability time. Failure-prone WSN applications, e.g., where nodes are deployed inharsh environments, can improve applications performance byutilising backup CHs.
g in wireless sensor networks: QoS optimisation for enhanced application2.005

4 M. Hammoudeh, R. Newman / Information Fusion xxx (2013) xxx–xxx
4. Number of paths: Multi-path routing yield a variety of benefitssuch as fault tolerance and increased bandwidth. It providesbetter transmission performance, fault tolerance and load bal-ancing. Path failure starts a path discovery process to discovernew routes, which introduces communication delays. Delaycan be reduced in multi-path routing, as backup routes can berecognised immediately with minimum service interruptiontransparently to the application. In time critical applications,splitting data to the same destination into multiple streamswhere each stream is routed through a different path canreduce data delivery delay makes the paths are more fullyutilised.
5. NDC: NDC is an effective reconfiguration algorithm to increasethe network lifetime by fairly distributing nodes across clusters.Balanced clusters lead to fair energy consumption of the CHs.Clustering is specifically practical for applications that need sca-lability to hundreds or thousands of nodes. Scalability in thisperspective means the need for load balancing and efficientresource utilisation. Applications requiring efficient data aggre-gation (e.g., calculating the average temperature in an area) arelikely candidates for clustering. A CH can aggregate the data col-lected by the nodes in its vicinity and thus decrease the numberof forwarded packets. Clustering can reduce communicationinterference.
The first step in implementing an application is primarily set-ting the routing parameters according to specific guidelines pro-vided by the routing protocol vendor. The most difficult part inthis process is making the required application-related decisions.Configuring those decisions into the routing protocol is a relativelysimple process.
ROL provides robustness through a multi-path routing. Multiplepaths can provide fault-tolerance, load balancing, and higheraggregate bandwidth. When a path fails, an alternative path canbe immediately used, which allows the protocol to dynamicallyadapt to failures without delays. Load balancing can be achievedby multiplexing the traffic along multiple routes. When multiplepaths are used simultaneously, the aggregate bandwidth of thepaths may satisfy the bandwidth requirement of the application.Therefore, since there is more bandwidth available, a smallerend-to-end delay may be achieved.
Multi-hop communication is an essential property of any scal-able routing protocol such as ROL. Besides reducing the radiotransmission power, multi-hop communication also has the fol-lowing benefits [19]:
CH1
CH2
d1
d2
Fig. 1. The filled nodes are CHs. Horizontal and vertical bars forming L shape areobstacles. The solid lines are path from node n1 to CH-1 and the dashed lines arepath from node n1 to CH-2.
Please cite this article in press as: M. Hammoudeh, R. Newman, Adaptive routinperformance, Informat. Fusion (2013), http://dx.doi.org/10.1016/j.inffus.2013.0
1. Spatial reuse: simultaneous communication sessions are possi-ble for node pairs that are out of range of each other.
2. Obstacle ‘‘conciliation’’: a multi-hop path can go around anobstacle that obstructs direct radio connection between twonodes as shown in Fig. 1.
3. Distributed processing: a multi-hop topology allows the localprocessing of sensor data among nearby nodes.
In some WSN deployments, e.g., in build areas, there may beobstacles blocking parts of the transmitter’s signal, such as walls,which will attenuate the signal seen at the receiver. Wireless net-works designers have traditionally used multi-hop relaying to by-pass obstacles, thereby gaining improved radio channel conditions[20]. As a result, multi-hop relaying provides an opportunity forperformance improvements in WSN applications. The authors ofthis work proposed a solution in [21] to manage obstacles betweennodes: Given a detour of length b[P,D] perpendicular to the line be-tween nodes P and D, the effective distance between the two pointsis defined as:
di ¼ fðd½P;D�Þ2 þ ðb½P;D�Þ2g12 ð1Þ
where b[P,D] is the strength of the barrier.ROL, defines the hop count metric to measure how far the sens-
ing node is from its CH. As the hop count in a particular routingpath increases, the message delivery delay and the power con-sumption within the network increases due to the higher numberof transmissions. The hop count metric allows nodes to: (1) Selectthe nearest CH, which saves energy by reducing messaging neededto bridge the distance between the node and its CH. (2) Find theshortest path to its CH.
ROL implements a metric called the backoff delay. This metric isused to minimise clusters set-up overhead and to aid the formationof more geographically uniform clusters. During the backoff inter-val, nodes receive several CH advertisement messages. When thebackoff delay reaches zero, the node transmits the advertisementmessage(s) with the smallest hop count. This helps in blockingadvertisement flooding from CHs that are farther away fromunnecessarily reaching neighbouring nodes.
During the cluster set-up phase, one or more nodes are chosenas CH backup node(s). When the current CH decides to hand itsrole to the backup node, it notifies the respective backup nodeand forwards to it necessary information, such as the backup nodeslist, to avoid a complete cluster set-up round.
4.1. ROL algorithm details
The operation of ROL can be split into two phases: the setupphase and the data transmission phase.
4.1.1. Set-up phaseDuring the set-up phase, CHs are selected and clusters are
formed. The sink randomly selects 5% of the nodes as CHs andfloods the network with this information. Every node that receivesthe sink’s discovery message changes its state from waiting to dis-covered and examines the message to check whether it has beenselected as CH or not. If yes, it starts a new cluster by broadcastingan advertisement message. Otherwise, it broadcasts the originaldiscovery message to its neighbours. The sink flooding step canbe compared to the seeking of a single route in Dynamic SourceRouting (DSR) [22], but every node knows only the next hop notthe complete hop-by-hop route to the sink, and no node knows aroute to any other node.
Every CH broadcasts an advertisement message with the hopcount set to 0. Upon receiving an advertisement message, a nodedoes the following: (1) If it already belongs to a cluster, it ignores
g in wireless sensor networks: QoS optimisation for enhanced application2.005

M. Hammoudeh, R. Newman / Information Fusion xxx (2013) xxx–xxx 5
the received message. (2) Else, if the received message carries asmaller hop count than the stored one, the latter is deleted andthe former is retained and it continues listening for new advertise-ments. After the backoff delay expires, the node re-broadcasts themessage with the smallest hop count after incrementing it by 1. Anode remembers the node from which it received the message asthe nearest neighbour to its CH. Then, the node calculates a valuevc based on its available energy to represent its desire to becomea CH in the next clustering round. vc is included in the join requestmessage that the node sends back to register with the chosen CH.The CH registers the node as a member of the cluster and adds thenodes with the highest vc to its CH backup list. Compounding dif-ferent functions into a single multi-purpose message reduces set-up communication overhead. The cluster formation messaging isillustrated in Fig. 2.
When the cluster round ends, the current CH hands its role tothe first node in the backup list. With a single local flood, thenew CH continues its predecessor’s role without the need of fur-ther communications. The CH role will also be handed to the back-up node when a fault occurs in the current CH or when its energylevel approaches a certain threshold. In the case of faults, such asphysical damage or fatal internal errors in the CH, the nodes willtransmit directly to the sink until a new cluster round is due.
4.1.2. Data transmission phaseDuring this phase, nodes transmit data to their CH. The CH
aggregates the received data before transmission to the sink orimmediately multiplexes messages over multiple lines in time crit-ical applications. Each member node transmits data on its assignedtime slot scheduled by the TDMA schedule. Furthermore, eachcluster communicates with the sink using unique Code DivisionMultiple Access (CDMA) codes to avoid interference with trafficgenerated by other clusters. Fig. 3, illustrates data transmissionfrom nodes to their CH. It also illustrates how the aggregated datais sent from the CH to the sink through multi-hop path.
: Open arrow represents creating a mes : Filled arrow represents forwarding a m a : backoff time b : random transmission time c : time the CH waits before it creates and
: ImCH(ch_id, numHop), an advertisenew role. It contains the CH ID and the: Wish(ch_id, wish_value), this is a joincontains the respective CH ID and a wiCH in the next round. : ADV_SCH(order), an advertisement nodes. It contains the TDMA schedulefor each node.
Sink n1 n2
22
2
3
4
2
2
3
4
4
4
aa
b
22
b
Collision
Fig. 2. In this scenario, node n3 was chosen to be a CH. It broadcasts an advertisementminimum hop count and send a join request message to the corresponding CH. After randc, to receive all potential join request messages before it creates and broadcast the TDMadvertisement messages at the same time. Section 4.1.3 describes how this type of colli
Please cite this article in press as: M. Hammoudeh, R. Newman, Adaptive routinperformance, Informat. Fusion (2013), http://dx.doi.org/10.1016/j.inffus.2013.0
4.1.3. Energy efficient sleep/Wake schedulingThis paper implements a simplified and modified version of S-
MAC [23]. S-MAC is a complex medium-access control protocolfor WSNs, which aims to reduce energy consumptions and supportself-configuration. Inspired by PAMAS [24], S-MAC sets idle nodesto sleep during transmissions of other nodes. The design of S-MACexpects that applications will have long idle periods and can toler-ate some latency. The implemented MAC protocol differs from theS-MAC protocol in the following aspects:
1. For simplicity, our implementation does not require periodicsynchronisation among neighbouring nodes to remedy theirclock drift.
2. Our implementation utilises the formed real communicationclusters, while S-MAC forms nodes into a flat topology or virtualclusters.
3. In S-MAC neighbouring nodes are free to talk to each other nomatter what listen schedules they have. In our implementation,nodes can only talk during their allocated time slot.
In the following we present some of the details of our imple-mentation, particularly the sleep/wake schedule.
Idle nodes consume significant amount of energy [25]. An effec-tive approach to preserve energy is to set the radio to sleep duringthe idle times and wake it up precisely before message transmis-sion/reception. In a network that involves multi-hop communica-tion, this requires precise synchronisation between sending andreceiving nodes. In the design of this sleep/wake scheduling meth-od, we ignore the effect of synchronisation errors. We assume thata network-wide time synchronisation protocol maintains a consis-tent notion of time between various nodes in the networks. Timesynchronisation has been extensively investigated and severalimplementations (e.g., [26,27]) can achieve synchronisation withinmicrosecond. A related assumption we make is that nodes alwayshave data of fixed length to send.
sage essage
advertise a TDMA schedule ment message sent by the CH to declare its number-of-hops to reach it. request sent by a sensing node to a CH. It
sh value representing its desire to become a
message sent by the CH to all its member that specifies the order of data transmission
n3 n4
2 22 2
33
3
c
4 444
a
b2
2
message. Receiving nodes wait for time a before they choose the message with theom delay b, nodes re-broadcast the received advertisement. The CH waits for a time,A schedule. Note the collision that happened when nodes n1 and n2 forward the
sions is managed.
g in wireless sensor networks: QoS optimisation for enhanced application2.005

d : data transmission time assigned in the TDMA : Data(data), data message sent by sensing node to its CH. It contains raw data collected by the node.
: ToS(AGdata), a message sent by the CH to the sink. It contains aggregated data.
d
5
66
6
5
55
d
Sink n1 n2 n3 n4
d
6
5
Fig. 3. The CH n3 aggregates all received data messages and sends them to the sink.
6 M. Hammoudeh, R. Newman / Information Fusion xxx (2013) xxx–xxx
In ROL, all nodes communicate with their CH through a TDMA.ROL upgrades the TDMA method used in LEACH to make it suitablefor multi-hop communication. The TDMA is created by each CHnode based on the number of nodes in the cluster. The time domainis divided into several periodic time slots of fixed length, one foreach node. The sleep/wake scheduling is integrated with the TDMAschedule to achieve greater energy savings (TDMA protocols avoidenergy waste due to contention); the radio is turned off during idletimes and wakes up just before message transmission/reception.To sustain a connected graph, nodes sleep times should be appro-priately synchronised. If a node is in the path of transmission ofother nodes, it must not sleep before it sends its own data and for-wards its children data. Sensing nodes make up their children setwhile forwarding the join request messages during the cluster set-up phase.
The proposed sleep/wake schedule aims to reduce the sleep la-tency by having a periodic receive-send-sleep cycle. This isachieved through level-by-level offset schedules, in which dataflows in step by step from the leaves of the tree towards the CH,with nodes going to sleep once they send their packets to their par-ents, and waking up just in time to receive the next round of pack-ets. In this design, we assume that the number of slots available tothe cluster is fixed. This in effect defines the duration of the peri-odic sleep cycle, and the wake cycle, which are assumed to bedetermined a priori by many factors including:
1. Application-specific requirements for energy efficiency, e.g.,end-to-end delay.
2. The size and type of the collected data, e.g., numerical, image, orvideo data.
3. The packet generation rate.4. Limitations on sleep/wakeup times of the radio hardware
involved.5. The processing time, especially in systems that involve complex
patterns of in-node processing (e.g., lossy data aggregation).6. The average distance between a node and its parent (propaga-
tion delay).7. Manufacturing imprecision and aging, the clock frequency is
affected by environmental factors including temperature, pres-sure, and voltage [28].
In the absence of a network-wide synchronisation protocol, aguard interval can be added to the slot to compensate for synchro-nisation errors. The sleep/wake schedule will result in every nodehaving a path on which all intermediate nodes have sequentiallyincreasing slots. The node wake up time is calculated as the trans-mission interval plus the number of hops between the leaf nodetimes a single slot length. For instance, if nodes send their data
Please cite this article in press as: M. Hammoudeh, R. Newman, Adaptive routinperformance, Informat. Fusion (2013), http://dx.doi.org/10.1016/j.inffus.2013.0
every m minutes and the slot length is sllsec, then, a node that isnh hops from the leaf node will wake up at time t = m + (sl � nh).
In large scale WSNs, multiple nodes should be allowed to trans-mit at the same time slot if their receivers are in non-conflictingparts of the network, i.e. a receiver of a specific transmission is alsowithin the radio range of another transmission intended for an-other node. If a node communication may interfere with anothernode communication, these nodes should not transmit simulta-neously. To avoid interference and unnecessary communicationdelay, each sensor node obtains the slot assignments of its neigh-bours. Then, the two nodes can synchronise to wake up at differenttimes. This sleep/wake pattern is similar to that of the S-MAC pro-tocol. In S-MAC each node follows a periodic active/sleep schedule,synchronised with its neighbouring nodes.
As in LEACH and S-MAC, ROL also uses CDMA to minimise inter-ference between clusters such that each cluster uses a different setof CDMA codes. When a node is in the multi-hop path for transmit-ting the aggregated data coming from the CH to the sink, it has toschedule carefully to participate in each communication. One wayto achieve this is by creating a secondary sleep/wake schedule. Thesecondary schedule is created sequentially starting at the CH. Sincethe CH knows the next hop towards the sink node, it synchroniseswith that node to wake up at time tCH = m + ot(sl � nhmax) wherenhmax is the longest path between the CH and a leaf node and ot
is a fixed time offset. This allows the CH to collect and aggregatedata from all of its member nodes. Then, each node on the pathto the sink increments the tCH by sl and forwards it to the nexthop in the path. This process terminates at the sink node.
For the duration of the network setup phase, CH advertisementcommunication is not guaranteed collision-free as TDMA sched-ules are only created after clusters are established. S-MAC handlescollisions resulting from interference with other signals by havingnodes backoff for a random duration before transmission. The fullSMAC implementation also deals with collisions through the use oftraditional mechanisms such as RTS/CTS exchange and virtual lis-tening according to a network allocation vector.
In delay sensitive applications or in applications that involveheavy bidirectional traffic, i.e. frequent network querying, all nodesin the network wake up at the same time according to a simpleperiodic pattern with a fixed period such as the IEEE 802.11.
4.2. A tool for performance optimisation
To find values for the routing parameters that are best for a par-ticular application, system designers are provided with an interac-tive tool (see Fig. 4). This tool, aids in resolving the performancedifferentiation of applications by incorporating the configurabilityof the ROL parameters. It can be used by system designers, who
g in wireless sensor networks: QoS optimisation for enhanced application2.005

Fig. 4. ROL interactive tool.
M. Hammoudeh, R. Newman / Information Fusion xxx (2013) xxx–xxx 7
have advance knowledge of application requirements, to order dif-ferent routing design objectives according to their importance forthe application and automatically calculates the routing parame-ters values. System designers can also use the tool to change differ-ent parameter values to manually optimise ROL performance. Asthe user changes the values, the impact of these changes on thevarious protocol performance areas is visually reflected on a scaleas a percentage from 0 to 100.
Theoretically, finding the best routing parameter values is a glo-bal optimisation problem. According to [29], the global optimisa-tion is to find the best possible element x⁄ from a set X accordingto a set of criteria F = {f1, f2 ,. . . , fn}. These criteria, called objectivefunctions, are expressed as functions. An objective function canbe expressed as f: x ´ Y with Y # R. Objective functions can besimple mathematical expressions as well as complex algorithms.Global optimisation covers all methods that can be used to findthe best element x⁄ in X such that f 2 F. Because the relation be-tween the various routing parameters and their effect on the rout-ing performance is clear, routing optimisation can be solved usingdeterministic algorithms. Such deterministic algorithms use prob-lem dependent heuristics based on a model of some natural phe-nomenon or physical process. In this work, global optimisation isapplied to sets F (many criterion) consisting of n = jFj objectivefunctions fi, each representing one design objective to beoptimised.
F ¼ fi : X # Yi : 0 < i 6 n; Yi # R ð2Þ
This class of optimisation algorithms is usually named with the pre-fix multi-objective. ROL achieves optimisation by computing aweighted sum g(x) of all functions fi(x) 2 F. Each objective fi is mul-tiplied with a weight wi corresponding to its priority. Weighted sumseeks Pareto optimal solutions [30] by systematically changing theweights among the objective functions, i.e. trading-off conflictingobjectives. Signed weights can be used to give some objectives moreweight or influence on the routing performance than other objec-tives in the same set. An example from [29] assumes that a weightwa = 1 is applied to an objective function fa and the weight wb = �1to the objective function fb. Decreasing g(x), results in reducing theinfluence of fa and increasing that of fb and vice versa. In this way,multi-objective problems can be simplified to single-objective ones.In [29], g(x) is presented as:
gðxÞ ¼Xn
i¼1
wifiðxÞ ¼X8fi2F
wifiðxÞ ð3Þ
Please cite this article in press as: M. Hammoudeh, R. Newman, Adaptive routinperformance, Informat. Fusion (2013), http://dx.doi.org/10.1016/j.inffus.2013.0
and
x� 2 X� () gðx�ÞP gðxÞ 8x 2 X ð4Þ
To generalise to an arbitrary number of objective and any dimen-sionality state space, we replace the scalar x by a vector field x(z)defined over domain x. The choice of a vector field for x allows mod-elling more than one quantity of interest. The new n objective func-tionals is
f ðxÞ ¼ZLðxðzÞÞdz
where L is a set of operators on the vector field x. The weights aregiven by the vector -, such that the overall cost function is e(-,x) =-Tf(x). The minimum cost solution for a given set of weights is x⁄(-), resulting in a total cost of e⁄(-) = minze(-,x) = e(-,x⁄(-)). Theweight function must be convex, regardless of the convexity of indi-vidual objective functions. The above weight function is convex in-. The proof is as follows:
Proof. Let e�ð-1Þ ¼ e�1 and e�ð-2Þ ¼ e�2 � e�ð-Þ is convex if for anyr 2 [0,1], e�ðr-1 þ ð1� rÞ-2ÞP re�1 þ ð1� rÞe�2.
e�ðr-1 þ ð1� rÞ-2Þ ¼min exðr-1 þ ð1� rÞ-2; xÞ
¼minzðr-1 þ ð1� rÞ-2ÞT f ðxÞ
P minz
r-T1f ðxÞ ¼ re�1 þ ð1� rÞe�2
Sensor network designers can choose the configurations that bestsuit their application requirements. If the default values of theparameters are used, ROL/NDC attempts to achieve a good level ofthe following main design objectives: energy efficiency, timeliness,and robustness. h
5. Optimal cluster balancing
In this section we propose an optional cluster balancing plug-incalled Nutrient-flow-based Distributed Clustering, NDC. This plug-in can be used with any clustering algorithm. The aims of the NDCalgorithm are: (1) To equalise, so far as is possible, the diameter ofthe clusters. (2) To equalise, so far as is possible, the membershipof the clusters. The distributed model described here is basedaround a metaphor of nutrient flow supporting some simple life-form, such as a mould. The concept is to provide a limited supplyof nutrient and allow the nodes to ally themselves with a CH which
g in wireless sensor networks: QoS optimisation for enhanced application2.005

8 M. Hammoudeh, R. Newman / Information Fusion xxx (2013) xxx–xxx
will provide the largest nutrient supply. If properly regulated, thisshould lead to clusters broadly equalising their membership. In or-der to minimise the radius of a cluster, it is arranged that some ofthe supply of nutrient is lost in transit between nodes – the furtherthe distance travelled, the more is lost. It is important that someadvantage be given to nodes that join in a cluster, rather than com-municating directly with the sink. For this reason, it is necessary toprovide some advantage associated with clustering, as opposed todirect communication. The simplest way to do this is to make theloss of nutrient super-proportional to the distance of a link. Giventhat in real life, radio propagation obeys an inverse square law, itseems reasonable to make the loss of nutrient proportional tothe square of the distance travelled.
Like many distributed route discovery algorithms, NDC operatesin distinct phases with the network reconfiguring itself from phaseto phase. During each phase, nodes try to improve the amount ofnutrient available to them. They do this by contacting a local nodeat random and if clustering with that node will offer a better sup-ply than that which is currently available, then the node changesallegiance. Nodes receiving requests for nutrient from other nodesmake an offer back to that node, giving an estimate of the nutrientthat would have been available had that node been a member of itscluster. The estimate depends both on the amount of nutrientavailable, and the number of nodes dependent on that CH.
Another consideration is that the algorithm has to give encour-agement for clusters to grow, that is that the amount of nutrientavailable becomes greater as nodes join the network. To effect thisin each phase the sink has an available amount of nutrient propor-tional to the total number of connected nodes. The starting condi-tions are as follows: (1) Some initial store of nutrient available atthe sink, nsink. (2) Current state of all other nodes is to have nonutrient, nav = 0.
From the initial state, some nodes (Nc) will by chance have di-rect contact with the sink. These become the initial CHs, and eachis given an equal share of the nutrient available nav ¼ nsink
jNc j , which isavailable to them as attenuated by the square of the distance fromthe sink. Across the network the sequence of events in each phaseis as follows:
Nutrient allocation: Each node transmits to its dependents (ifany) the total amount of nutrient available to that cluster andthe current number of members (including the CH) at that levelof the hierarchy. Each dependent calculates its share of nutrient,S, for this phase, which is
n
m� k� d2
where n is the total nutrient available to the cluster, m is the num-ber of members, k is a constant of proportionality for the distanceadjustment and d is the distance between the node and the CH.
CH advertisement: Each node which has a supply of nutrient se-lects another node (or set of nodes, to speed up the evolution of thesystem) at random and forwards the above information, along withthe identity of the CH.
Nutrient estimation: The receiving node calculates the amount ofnutrient, S0, it could have received in this phase as a member of thatcluster. If the amount is greater than its actual allocation in thisphase it communicates with the CH and joins the cluster (alsocommunicates with its old CH to leave that cluster).
CH propagation: CHs propagate upward through the networkthe number of members. The sink calculates the amount of nutri-ent available to each clustered for the next phase using the formula
nn ¼ no�mnmo
where nn is the nutrient available for the next phase, no is the nutri-ent available this phase, mn is the membership reported, mo is the
Please cite this article in press as: M. Hammoudeh, R. Newman, Adaptive routinperformance, Informat. Fusion (2013), http://dx.doi.org/10.1016/j.inffus.2013.0
membership reported for the previous phase. The effect of this re-distribution of nutrients is to advantage CHs gaining members, inorder to avoid cyclical movement of members between clusters.The operation of the NDC clustering is summarised in Algorithm 1.
Algorithm 1. NDC cluster balancing.
1. some nodes become initial CHs2. the sink gives each CH nutrient share nav3. each CH sends the values of n and m4. nodes receiving the CH message do the following:5. calculate S6. forward current CH id & the received n and m values7. nodes receiving the forwarded message do the following:8. calculate S0
9. IF S0 > S THEN10. leave current CH11. join the CH in the forwarded message12. END IF13. all CH send their m value to the sink14. the sink calculate nnext
15. the sink broadcast nnext value
From the viewpoint of theory, the resource allocation policy of acommunication link can be depicted by a Directed Acyclic Graph(DAG) [31] with a single root representing the sink and leaf nodesrepresenting individual traffic streams. Middle nodes representorganisational entities. Each node gets resources from its parentand identifies how its resources are distributed to its children.Examples of policies include fair resource sharing at various gran-ularities, traffic priorities, and communications distances. DAGscan be used by various applications to specify how traffic streamsor groups of nodes should share bandwidth. By merging sub-graphs, the management policies of various routing resources(e.g., timeliness) can be characterised simultaneously. NDC lendsitself naturally to dealing with failure recovery in an integratedmode during the resource distribution process. For instance, appli-cations can prepare for a quick response to the failure of nodes andlinks during the formation of the graph, e.g., use another sub-graphwith highest resource availability. Fig. 5a shows a simple 2-clusternetwork scenario modelled as a DAG based on the received nutri-ent values. In Fig. 5b, the optimised DAG based on the highestnutrient availability is shown. To accommodate nutrient flow inthe network scenario, the problem of local maxima need to besolved. This means that NDC has to ensure that there exists a pathfrom any node to its CH and the nutrient levels of all nodes alongthe path are strictly increasing towards the CH, i.e. there exists aneighbour of Hi, Hj, and Si < Sj. This is achieved by normalisingthe node to CH distance (d). When d > 1, the probability of localmaxima is P0. Therefore, the original function is modified to usedNorm(0,1). By negation, assume that there is no neighbour withSi < Sj, for every node Hj, Si P Sj. Then, from the iterative calcula-tion of the nutrient, Si, we can write:
Si ¼nParent
mParent � k� d2Norm
^ Sj P Sj
Thus
nParent
mParent � k� d2Norm
P Sj and dNorm P 1
which contradicts the previous assumption that dNorm 2 (0,1).Therefore, for every sensor node connected to the network, thereexists at least one link from that node to the CH.
g in wireless sensor networks: QoS optimisation for enhanced application2.005

Fig. 5. DAG based on nutrient transfer.
M. Hammoudeh, R. Newman / Information Fusion xxx (2013) xxx–xxx 9
6. Evaluation metrics
In this section, the performance of ROL is to be evaluated viasimulations with respect to the following metrics:
6.1. Data delivery ratio
Data Delivery Ratio (DDR) is a service level parameter that indi-cates the network effectiveness in transmitting offered data in onedirection of virtual connection [32]. It is considered as one of theprime measures of robustness. DDR is a ratio of successful distinctpayload octets received to attempted payload octets transmitted[32]. When calculating DDR, the packets which arrived late at thedestination are considered ineffective. The DDR for a single nodeSi is denoted as DDR(Si) and defined as:
DDRðSiÞ ¼P
data delivered to the sinkPdata offered by Si
� 100% ð5Þ
where data delivered is successfully delivered payload octets anddata offered is the attempted payload octets transmitted. The overallDDR of a network with a number of nodes n, denoted as DDRN, is theaverage DDR of all nodes:
DDRN ¼1n
Xn
i¼1
DDRðSiÞ ð6Þ
6.2. Timeliness
Timeliness is measured as the time normalised against the aver-age time for a single-hop along the shortest path from a node to thesink [33]. Recent studies in WSNs focus on timeliness as a QoS met-ric (e.g., [34]). The average delay taken by the first copy of a packetfrom the source node, Si, to the sink is denoted as T(Si). T(Si) in-cludes all possible delays that are caused by queuing in the inter-face queue, retransmission at the MAC layer and the propagationthrough the environment. The average delay of all n nodes, de-noted as TN, is given by:
TN ¼1n
Xn
i¼1
ðta � tsÞ ð7Þ
where ta is the time a packet arrives at the sink and ts is the time apacket sent at the source. The delay depends also on the scale of thenetwork [33]. The average network delay is the total delay divided
Please cite this article in press as: M. Hammoudeh, R. Newman, Adaptive routinperformance, Informat. Fusion (2013), http://dx.doi.org/10.1016/j.inffus.2013.0
by the number of connection pairs throughout the simulation toeliminate the effect of the network scale. Then timeliness is mea-sured as follows [33]:
TNetwork ¼TN
1n
Pni¼1hðSiÞ
¼Pn
i¼1TðSiÞPni¼1hðSiÞ
¼ 1n
Xn
i¼1
TðSiÞhðSiÞ
ð8Þ
where h(Si) is the minimum hop count from Si to the sink. TNetwork isthe average time it takes a packet to be delivered. When TNetwork = 1,it means that the packets have an equivalent average delay of thesame packets delivered through the shortest paths with a delay of1 on each hop.
6.3. Energy efficiency
Since radio communication is the most power hungry operation[35], the cost that ROL imposes on the networks is considered interms of number of messages sent. This measure also gives an indi-cation of the bandwidth usage besides the energy consumption.Recall that all messages, including the ones originating from theCHs and carrying aggregated data, have a fixed data length. In thiswork, we are only interested in studying the effect of using thebackoff time metrics on the cluster setup traffic. Therefore, the set-up traffic for a single cluster formation round, TrRound is calculatedas:
TrRound ¼number of sent messages
Clifeð9Þ
where Clife is the time spanning from the moment the CH sends thefirst advertisement message to the moment all cluster members re-ceive the TDMA schedule.
7. Simulation experiments
As ROL is derived from LEACH, we adopt the same network andenergy model for better comparison. We use the specification ofMICAz [36], a popular sensor node prototype, to make the simula-tion adhere to the real hardware parameters of WSNs. Randomgraphs were dispersed in a 100 m � 100 m region such that notwo nodes share the same location and the transmission range ofeach node is bound to 75 m. The bandwidth of the channel wasset to 250 kbps, each data message was 50 bytes long, and thepacket header for various message types was fixed to 30 bytes. Asimple model for radio hardware energy dissipation is also
g in wireless sensor networks: QoS optimisation for enhanced application2.005

Fig. 7. Energy performance analysis.
10 M. Hammoudeh, R. Newman / Information Fusion xxx (2013) xxx–xxx
assumed. All the nodes were given an initial 0.5 J supply of energy.For the experiments described here, both the free space (d2 powerloss) and the multi-path finding (d4 power loss) channel modelswere used. The processing delay for transmitting a message is ran-domly chosen between 0 and 5 ms. Using this network configura-tion, we simulated in the Dingo WSN simulator [37] the ROL/NDC,Mires++, and LEACH with 5% of the nodes being CHs.
7.1. Energy consumption
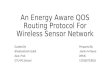
This experiment studies the effect of the ROL/NDC parameterson the energy consumption. ROL/NDC was simulated with variousbackoff delay values. Fig. 6 plots the total number of setup mes-sages versus the backoff delay. When the backoff delay is set to 0the behaviour of ROL/NDC will be similar to LEACH. The figureshows that as the backoff delay increases, the number of setupmessages decreases until the time becomes large enough for nodesto receive advertisements from all CHs. The optimal backoff delayis calculated from Fig. 6 to be around 20 ms. Using this value, thetotal number of set-up messages is reduced by up to 65%.
Fig. 7 shows ROL/NDC, Mires++, and LEACH network life. Thenetwork life is studied as the number of rounds until the first nodedies (Fig. 7a) and the number of rounds until the last node dies(Fig. 7b). ROL/NDC achieves energy gains by reducing the cluster-ing overhead, load balancing across clusters, and using shortestmulti-hop communication paths.
In Mires++ and LEACH the network life trend was flat and con-siderably lower than ROL/NDC. Mires++ incurs high energy con-sumption due to heavy setup communication. Often adaptingsynchronous communication, such as the publish/subscribe styleused in Mires++, is computationally intensive process. Mires++ alsospend a significant amount of energy on updating nodes topicssubscription. In LEACH, the long range radio transmission resultsin nodes energy depletion. Also, LEACH requires nodes to continu-ously listen to the channel, which results in considerable energywaste. Generally, clusters formed based on the shortest distancewill consume minimum communication energy at the beginning,but energy consumption will eventually increase due to the re-clustering overhead.
7.2. Load-balancing
This experiment covers network load-balancing offered as amain design objective of ROL/NDC. We study the effect of thehop count, the backoff delay, and the use of NDC on clusters forma-tion (geographic span and population). LEACH, Mires++, and ROL/NDC were respectively applied on randomly generated networktopologies. Due to the effect that nodes distribution have on the re-sults, multiple simulation runs are combined to estimate uncer-tainties in the simulations. In other words, to demonstrate that
Fig. 6. CH advertisement traffic versus backoff delay.
Please cite this article in press as: M. Hammoudeh, R. Newman, Adaptive routinperformance, Informat. Fusion (2013), http://dx.doi.org/10.1016/j.inffus.2013.0
the load is balanced for any setup we ran the same experimentsfor five different distributions. This makes our simulation a MonteCarlo simulation, as repeated sampling from a distribution is per-formed. Also, to accommodate to the effect of CH locations onnodes distribution, CH locations were kept fixed in all runs (origi-nal location were determined nondeterministically). In each proto-col run, randomly distributed nodes are organised into five clusters(optimal percentage of CH as calculated in LEACH). Then, node dis-tribution between different clusters is studied. In ROL/NDC thebackoff delay were set to 20 ms and the hop count initially set to 0.
Fig. 8 shows nodes distribution among clusters formed usingLEACH, Miress++, and ROL/NDC. The population density (the num-ber of nodes per unit area) of various LEACH generated clustersvaries largely (see Fig. 8a; the first and fifth clusters hosted over65% of the total number of nodes on 62.5% of the application area,while the other three clusters hosted less than 35% of the total net-work population on the rest of the application area. LEACH poorperformance is mainly due to defining network regions by incon-sistent wireless connectivity. It does not deploy any mechanismthat manages the span or the membership of clusters.
In Miress++ (Fig. 8b), nodes were distributed more fairly amongclusters when compared to LEACH. However, two of its clusterswere underpopulated (hosted 10% of the total population). This ispossibly due to nodes distribution. Miress++ ignores the locationand distance between nodes when forming its clusters. The unfaircluster population is critical as Miress++ relies only on rotating CH
g in wireless sensor networks: QoS optimisation for enhanced application2.005

Fig. 8. Load-balanced cluster formation.
M. Hammoudeh, R. Newman / Information Fusion xxx (2013) xxx–xxx 11
to achieve load balancing, i.e. without balanced cluster member-ship it will be load unbalanced.
ROL/NDC formed energy efficient clusters by reducing thebridging distance between nodes and their CH (see Fig. 8c). Thenumber of nodes at every cluster maintained a maximum of 7% dif-ference from the optimal population (20%). Proportional non-over-lapping clusters of physically close nodes reduce the clustermanagement overhead and therefore the total network energyconsumption. The average variance, from the optimal, of the cover-age polygon of the 10 clusters in ROL/NDC networks is 3.1075. This
Please cite this article in press as: M. Hammoudeh, R. Newman, Adaptive routinperformance, Informat. Fusion (2013), http://dx.doi.org/10.1016/j.inffus.2013.0
variance is approximately three times smaller than that of LEACH(11.818).
7.3. Robustness
This experiment aims to measure ROL/NDC’s ability to maintaina high DDR within a given timeliness constraint in the presence ofcommunication failures.
This evaluation scenario simulates permanent communicationfailures caused due to hardware failure or energy depletion. In Din-go, node attributes include the expected time of node failure andfailure type (e.g., PHY_D indicates physical node damage by anexternal event). These attributes is used to break communicationlinks during the simulation at a given times. During simulations,faulty nodes are selected randomly based on their node ID (an inte-ger value between 1 and n), where n is the total number of nodes inthe network. The selection of nodes is not correlated with the nodelocation. Failures occur during the first data transmission phase;after the node sends its data, its energy level drops to 0 J, conse-quently its radio will be switched off. Other nodes continue tofunction normally according to their assigned TDMA slot.
Fig. 9a shows the DDR for ROL/NDC, Mires++, and LEACH. TheDDR of the three protocols decreases as the node density increases.ROL/NDC maintains very high DDR, close to 1, in all tested networkdensities. In ROL/NDC, nodes know multiple paths to their CH. Ifthe primary path fails, one of the standby paths will be used. More-over, CH failures can be quickly recovered without incurring largedata loss. The short distance between nodes and their CH helps inlocalising traffic, which results in less congestion and data loss.
LEACH, however, offers lower DDR, first is ROL/NDC. The longrange communication increases the potential for collisions. Addi-tionally, if the sink is out of nodes communication range, data willnot be delivered.
Mires++ does not define any mechanism to deal with node orcommunication paths failures, it only focuses on CH failures. More-over, excessive delay due to heavy in-network processing, dataaggregation and fusion, significantly reduced the DDR.
Fig. 9b plots the average end-to-end delay for the ROL/NDC,Mires++, and LEACH at different node densities. At each point,the end-to-end delay of five runs was averaged. ROL/NDC has low-er average end-to-end delay than Mires++ and LEACH. There areseveral factors accounting for this outcome. First, ROL/NDC for-wards data on the shortest path to the CH, therefore, reduces prop-agation and queuing delays. Second, in time critical applicationsROL/NDC multiplexes data over multi-paths to avoid congestedpaths.
However, in LEACH, nodes can only transmit their data accord-ing to a TDMA schedule that includes the entire network due to thesingle hop communication. Major delays can be caused by the timeperiod during which failed or lost paths can be recovered.
In Mires++, the publish/subscribe communication and the mes-sage handling process introduces considerable delays. First, incom-ing messages has to be validated by examining several headerfields. Then, valid messages are sent to the corresponding messagehandler based on the message type. After parsing the message pay-load, the message handler updates the state of the node and re-spond accordingly. To reduce raw data transmissions, cHs andsensor nodes run sophisticated computing algorithms, such as dataaggregation and fusion, which introduces considerable messagedelivery delays.
7.4. Selection according to application
From the discussion above, it can be seen that ROL/NDC outper-forms the other protocols with regard to energy consumption, loadbalancing and robustness. Thus, there are few WSN applications for
g in wireless sensor networks: QoS optimisation for enhanced application2.005

Fig. 9. Robustness comparison in terms of DDR and average end-to-end delay.
12 M. Hammoudeh, R. Newman / Information Fusion xxx (2013) xxx–xxx
which it would not produce a better functioning system than theothers, so long as they are based on a set of nodes with reasonablysimilar resource, since ROL/NDC is based around distribution of theworkload. For systems based on a powerful network controller andsmall, computationally weak nodes, a simpler centralised protocolsuch as MESTER would be appropriate. Networks using more fullyresourced nodes will tend to be those using nodes carrying a di-verse sensor load, including sensors requiring extensive data pro-cessing by the node. This type of network will also tend toproduce a greater volume of data, favouring the higher DDR andlower end-to-end delay that ROL/NDC offers. The differences inperformance are also less pronounced for small networks, belowa few hundred nodes. So, while ROL/NDC is advantageous for allnon-centralised networks, it comes into its own for very large net-works, composed of relatively powerful nodes, in which each nodegenerates substantial amounts of data. WSN of this type are stillrelatively rare in practice, with most consisting of a few tens ofnodes. However, in many applications networks are installedincrementally, and may be expected to grow to a considerable sizeover a few years. For instance a recent application [38] known tothe authors places a small sensor network, of around ten nodesin a vineyard as part of a food quality traceability system. Eachnode carries temperature, humidity, sunlight and leaf wetness sen-sors, and currently transmits data to a single base station. In itspresent configuration, any of the protocols discussed here wouldbe adequate. But, the vineyard in which it is installed has a numberof similar fields, so if this installation is successful in returning oninvestment, the network will grow to over a hundred nodes quitequickly. This is about the size where the advantages of ROL/NDCbecome apparent. Furthermore, this vineyard is a member of aco-operative, and if all members adopt the same system then thenetwork will grow to over a thousand nodes, and an ROL/NDC sys-
Please cite this article in press as: M. Hammoudeh, R. Newman, Adaptive routinperformance, Informat. Fusion (2013), http://dx.doi.org/10.1016/j.inffus.2013.0
tem will outperform one based on the other protocols. Particularly,the longer life due to lower energy usage and the greater robust-ness would be expected to translate directly to a lower cost ofownership, and this an increased return on investment.
8. Conclusion
This paper presented a distributed clustering protocol, calledROL/NDC. This protocol groups nodes into clusters and build rout-ing paths based on localised metrics that are linear in the numberof nodes and linear in the number of links, which makes ROL en-ergy and computationally efficient. This work, distinguishes itselffrom current state of the art solutions in three respects. First, ituses a combination of optimisable routing metrics to build energyefficient clusters at low cost. These parameters can be configuredand managed to allow user applications to perform better andcoexist with each others. Second, it defines a new cluster balancingmethod. Third, unlike existing work that focuses on one designgoal, ROL/NDC can achieve comparable results in all of the abovedesign aims.
In future we intend to test the proposed algorithms with otherapplications and network topologies. Most importantly, we willconsider the inclusion of more design objectives into ROL/NDCand research more sophisticated methods to optimise it for specificapplications. An interesting extension of this work would bedesigning a sleep/wake scheduling algorithm that considers vari-able size messages. This is particularly useful for applicationswhere a node may have considerably more data to send than someother nodes, e.g., aggregated data or image of detected event. Inthis case per-hop MAC level fairness is not important as long asapplication-level performance is not degraded.
References
[1] W. Heinzelman, A. Chandrakasan, H. Balakrishna, Energy-efficientcommunication protocol for wireless microsensor networks, in: Proceedingsof the 33rd International Conference on System Sciences, 2000.
[2] P. Nie, Z. Jin, Y. Gong, Mires++: a reliable, energy-aware clustering algorithmfor wireless sensor networks, in: Proceedings of the 13th ACM InternationalConference on Modeling, Analysis, and Simulation of Wireless and MobileSystems, ACM, 2010, pp. 178–186.
[3] P. Kulkarni, D. Ganesan, P. Shenoy, The case for multi-tier camera sensornetworks, in: Proceedings of the 13th Annual ACM International Conference onMultimedia, 2005, pp. 229–238.
[4] Y. Yang, M.I. Fonoage, M. Cardei, Improving network lifetime with mobilewireless sensor networks, Comput. Commun. 33 (2010) 409–419.
[5] J. Zhang, V. Varadharajan, Review: wireless sensor network key managementsurvey and taxonomy, J. Netw. Comput. Appl. 33 (2010) 63–75.
[6] G. Smaragdakis, I. Matta, A. Bestavros, Sep: a stable election protocol forclustered heterogeneous wireless sensor networks, in: Second InternationalWorkshop on Sensor and Actor Network Protocols and Applications (SANPA2004), 2004.
[7] O. Younis, S. Fahmy, Heed: a hybrid, energy-efficient, distributed clusteringapproach for ad hoc sensor networks, IEEE Trans. Mobile Comput. 3 (2004)366–379.
[8] Y. Yang, H. Wu, W. Zhuang, MESTER: minimum energy spanning tree forefficient routing in wireless sensor networks, in: Proceedings of the 3rdInternational Conference on Quality of Service in Heterogeneous Wired/Wireless Networks, ACM, 2006, p. 17.
[9] S. Lindsey, C. Raghavendra, Pegasis: power efficient gathering in sensorinformation systems, in: Proceedings of the IEEE Aerospace Conference, 2002.
[10] T. Abdelzaher, T. He, J. Stankovic, Feedback control of data aggregation insensor networks, in: Decision and Control, 2004. CDC. 43rd IEEE Conferenceon, vol. 2, 2004, pp. 1490–1495.
[11] M. Hammoudeh, R. Newman, S. Mount, C. Dennett, A combined inductive anddeductive sense data extraction and visualisation service, in: Proceedings ofthe 2009 International Conference on Pervasive Services, 2009, pp. 159–168.
[12] S. Chun-yan, Z. Hua-zhong, Z. Xiu-yang, Clustering hierarchy tree routingalgorithm based on leach, J. Comput. Appl. 28 (2008) 2594.
[13] X. Wei, T. Ya-qing, X. Hua, M. Yu-wen, Hierarchical routing protocol to handletopological variety for wireless sensor network, Chinese J. Sensors Actuat. 21(2008) 1635–1639.
[14] D. Kumar, T.C. Aseri, R.B. Patel, EEHC: energy efficient heterogeneous clusteredscheme for wireless sensor networks, Comput. Commun. 32 (2009) 662–667.
g in wireless sensor networks: QoS optimisation for enhanced application2.005

M. Hammoudeh, R. Newman / Information Fusion xxx (2013) xxx–xxx 13
[15] M. Tubaishat, J. Yin, B. Panja, S. Madria, A secure hierarchical model for sensornetwork, SIGMOD Rec. 33 (2004) 7–13.
[16] I. Jawhar, N. Mohamed, K. Shuaib, N. Kesserwan, An efficient framework andnetworking protocol for linear wireless sensor networks, Ad Hoc Sensor Wirel.Netw. 7 (2009) 3–21.
[17] M. Hammoudeh, T. Alsboui, Building programming abstractions for wirelesssensor networks using watershed segmentation, in: Smart Spaces and NextGeneration Wired/Wireless Networking, Lecture Notes in Computer Science,vol. 6869, 2011, pp. 587–597.
[18] H.-N. Dai, Throughput and delay in wireless sensor networks using directionalantennas, in: 5th International Conference on Intelligent Sensors, SensorNetworks and Information Processing (ISSNIP), 2009, 2009, pp. 421–426.
[19] C. Gui, Routing Performance and Power Conservation in Ad Hoc and SensorNetworks, Ph.D. Thesis, Computer Science, 2005.
[20] Y. Liu, R. Hoshyar, X. Yang, R. Tafazolli, Integrated radio resource allocation formultihop cellular networks with fixed relay stations, IEEE J. Sel. AreasCommun. 24 (2006) 2137–2146.
[21] M. Hammoudeh, R. Newman, C. Dennett, S. Mount, Interpolation techniquesfor building a continuous map from discrete wireless sensor network data,Wirel. Commun. Mobile Comput. 2 (2011) 41–60.
[22] D.B. Johnson, D.A. Maltz, Dynamic source routing in ad hoc wireless networks,in: Imielinski, Korth (Eds.), Mobile Computing, vol. 353, Kluwer AcademicPublishers, 1996.
[23] W. Ye, J. Heidemann, D. Estrin, An energy-efficient mac protocol for wirelesssensor networks, in: INFOCOM 2002. Twenty-First Annual Joint Conference ofthe IEEE Computer and Communications Societies, Proceedings, IEEE, vol. 3,2002, pp. 1567–1576.
[24] S. Singh, C.S. Raghavendra, PAMAS – power aware multi-access protocol withsignalling for ad hoc networks, SIGCOMM Comput. Commun. Rev. 28 (1998)5–26.
[25] Y. Wu, S. Fahmy, N.B. Shroff, Energy efficient sleep/wake scheduling for multi-hop sensor networks: non-convexity and approximation algorithm, in: 26thIEEE International Conference on Computer Communications, 2007, pp. 1568–1576.
Please cite this article in press as: M. Hammoudeh, R. Newman, Adaptive routinperformance, Informat. Fusion (2013), http://dx.doi.org/10.1016/j.inffus.2013.0
[26] J. Elson, L. Girod, D. Estrin, Fine-grained network time synchronization usingreference broadcasts, SIGOPS Oper. Syst. Rev. 36 (2002) 147–163.
[27] S. Ganeriwal, R. Kumar, M.B. Srivastava, Timing-sync protocol for sensornetworks, in: Proceedings of the 1st International Conference on EmbeddedNetworked Sensor Systems, SenSys ’03, ACM, New York, NY, USA, 2003, pp.138–149.
[28] J.R. Vig, Introduction to Quartz Frequency Standards, SLCET-TR 92-1, ArmyResearch Laboratory, 1992. <http://www.ieee-uffc.org/freqcontrol/quartz/vig/vigtoc.htm>.
[29] T. Weise, Global Optimization Algorithms – Theory and Application, seconded., 2008. <http://www.it-weise.de/> (accessed 2012-06-17).
[30] O. Cordón, A historical review of evolutionary learning methods for mamdani-type fuzzy rule-based systems: designing interpretable genetic fuzzy systems,Int. J. Approx. Reason. 52 (2011) 894–913.
[31] N. Christofides, Graph Theory: An Algorithmic Approach (Computer Scienceand Applied Mathematics), Academic Press, Inc., Orlando, FL, USA, 1975.
[32] J. Dunn, C. Martin, Terminology for frame relay benchmarking, in: InternetInformational RFC 3133, 2001.
[33] P. Sun, W.K. Seah, P.W. Lee, Efficient data delivery with packet cloning forunderwater sensor networks, in: Symposium on Underwater Technology andWorkshop on Scientific Use of Submarine Cables and Related Technologies,2007, pp. 34–41.
[34] M. Caccamo, L.Y. Zhang, L. Sha, G. Buttazzo, An implicit prioritized accessprotocol for wireless sensor networks, in: RTSS ’02: Proceedings of the 23rdIEEE Real-Time Systems Symposium, IEEE Computer Society, 2002, p. 39.
[35] G.J. Pottie, W.J. Kaiser, Wireless integrated network sensors, Commun. ACM 43(2000) 51–58.
[36] Crossbow, Micaz Datasheet, 2012. <http://bullseye.xbow.com:81/Products/Product_pdf_files/Wireless_pdf/MICAz_Datasheet.pdf> (accessed 06.11.12).
[37] S. Mount, Dingo Wireless Sensor Networks Simulator, 2012. <http://code.google.com/p/dingo-wsn/> (accessed 12.03.12).
[38] F2F, RFID From Farm to Fork, 2012. <http://www.rfid-f2f.eu/> (accessed23.10.12).
g in wireless sensor networks: QoS optimisation for enhanced application2.005