Embed Size (px)
Citation preview

Project Presentation on
Land rover robot using GSM TechnologySubmitted by : Roll no: Under the guidance of:
1.J.Sudarshanreddy 117Y1A0425 V.Madhuri mam
2.D.Rambabu 117Y1A0417 Asst.Professor
3.P.Ajaykumar 117Y1A0446 Dept of E.C.E
4.S.Hasan 117Y1A0463 A1 Global Inst of Engg & Tech
5.Y.Chandrasekharreddy 117Y1A0493
A1 GLOBAL INSTITUTE OF ENGINEERING AND TECHNOLOGY
Department of electronics and communication engineering
A1 GLOBAL INSTITUTE OF ENGINEERING AND TECHNOLOGY, MARKAPUR

CONTENTS: INTRODUCTION.
AIM.
BLOCK DIAGRAM.
FUNCTIONS.
SOFTWARES.
IMPLEMENTATION
ADVANTAGES.
DISADVANTAGES.
APPLICATIONS.
FUTURE SCOPE.
CONCLUSION.A1 GLOBAL INSTITUTE OF ENGINEERING AND TECHNOLOGY, MARKAPUR
INTRODUCTION:
This project taken from embedded system.
Embedded system is combination of hardware and software.
Embedded system is used to perform a single task.
In this project the robot control based on message.
Sent message from mobile to GSM modem .
Based on message the robot move the forward or backward or
right .
In this project used wireless communication.
GSM modem for communication purpose.
A1 GLOBAL INSTITUTE OF ENGINEERING AND TECHNOLOGY, MARKAPUR
AIM:
The main aim of this project to control the robot trough GSM in
anywhere in the earth.
The other important objective that are associated in installing of
robotic system is;
1. Saving of manpower.
2. Ability to work in any type environment.
The other one object of this project to build a low cost and
efficient wireless robotic system.
A1 GLOBAL INSTITUTE OF ENGINEERING AND TECHNOLOGY, MARKAPUR
EXISTING SYSTEMS
Designed and developed an land rover robot motion is
controlled by using an bit 8 bit microcontroller.
To move in all direction like forward, reverse, right and left as
per the commands given by the controller.
Communication between robot and mobile is bidirectional
communication, which takes place by DTMF with 9600bps.
A1 GLOBAL INSTITUTE OF ENGINEERING AND
TECHNOLOGY, MARKAPUR
PROPOSED SYSTEM:
This system is made more useful by migrating from 8bit to 32bit
ARM 7 microcontroller.
The high range GSM transmitter and receiver are used.
A GSM modem is used send SMS.
In industries different type of sensors are used to develop.
A1 GLOBAL INSTITUTE OF ENGINEERING AND TECHNOLOGY, MARKAPUR
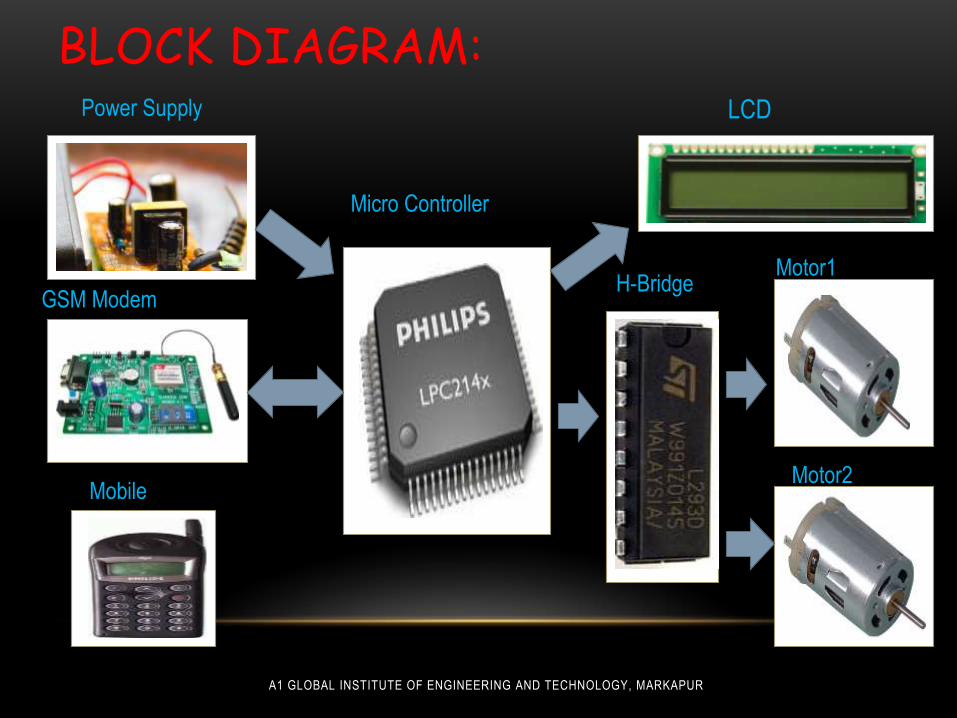
BLOCK DIAGRAM:
Micro Controller
LCDPower Supply
GSM Modem
Mobile
H-BridgeMotor1
Motor2
A1 GLOBAL INSTITUTE OF ENGINEERING AND TECHNOLOGY, MARKAPUR
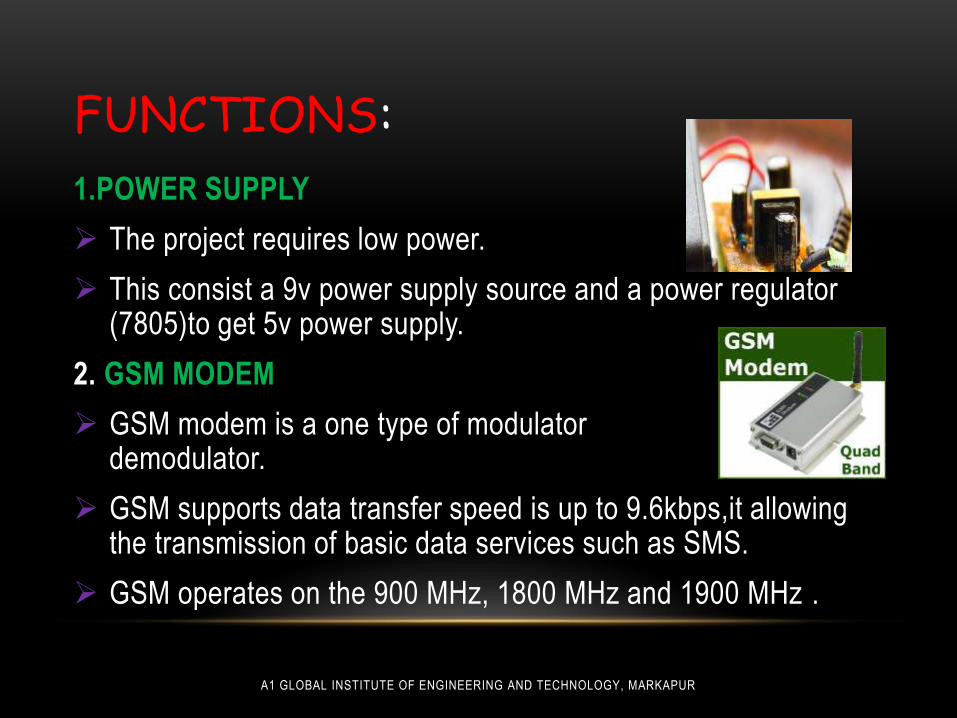
FUNCTIONS:
1.POWER SUPPLY
The project requires low power.
This consist a 9v power supply source and a power regulator (7805)to get 5v power supply.
2. GSM MODEM
GSM modem is a one type of modulator demodulator.
GSM supports data transfer speed is up to 9.6kbps,it allowing the transmission of basic data services such as SMS.
GSM operates on the 900 MHz, 1800 MHz and 1900 MHz .
A1 GLOBAL INSTITUTE OF ENGINEERING AND TECHNOLOGY, MARKAPUR
3.MICROCONTROLLER:
In this project we used a 32bit ARM7 microcontroller.
The micro controller connect GSM modem interface with a
RS232 cable.
This microcontroller contains 512KB flash memory,32KB RAM
and additional 8KB for USB.
It has 2 UARTs for communication purpose.
It has a pipe line architecture and low power RTC(real time
clock).
It has 2 ports (P0,P1),we use only P0.
It contains 32pins it is used for input and output connection
purpose.A1 GLOBAL INSTITUTE OF ENGINEERING AND TECHNOLOGY, MARKAPUR
4.LCD
LCD is used for to display the motion of a robot like forward, reverse or right side.
5.H-BRIDGE
H-Bridge is a one of the IC(L293D),it is also known as motor driver.
L293D inputs are take from microcontroller and amplifies their power to control the motor.
Wide supply voltage range:4.5v to 36v and High-Noise-Immunity input.
6.DC MOTORS
It is mainly used for moving a robot .
It requires 12v of DC supply.
A1 GLOBAL INSTITUTE OF ENGINEERING AND TECHNOLOGY, MARKAPUR
SOFTWARE:
1.KEIL
It is used for developing a programming code.
By using this software to create a hex file.
2.PROTEUS
we can design a hardware in this software.
The output can verified in this software.
3.FLASH MAGIC
Flash magic is used to dump a programming code(hex file) into
hardware.
A1 GLOBAL INSTITUTE OF ENGINEERING AND TECHNOLOGY, MARKAPUR
IMPLEMENTATION
The power supply 3.6V is connected IC pins 23,6(VDD&GND).
The GSM modem is connected to any one of UARTs trough a
RS232 cable.
The LCD (16 2) is connected to 8pins of PORT0.
The H-Bridge(L293D) 4 input pins are connected to any 4pins
of PORT0.
The H-Bridge amplifies the input signal and send to the motors.
The 2motors are connected to 4pins of the H-Bridge.
The LCD and H-Bridge pins are connected to PORT0 as per the
program.
A1 GLOBAL INSTITUTE OF ENGINEERING AND TECHNOLOGY, MARKAPUR
The USB cable is connected between PC and hardware kit.
A1 GLOBAL INSTITUTE OF ENGINEERING AND TECHNOLOGY, MARKAPUR
The developing program is dumped to hardware kit trough Flash
magic and USB.
By using a mobile we can send a message to GSM modem, it
demodulate that message to send a microcontroller.
The microcontroller compare GSM information and programming
code information.
If the information is correct the controller generate a input to H-
bridge.
Based on controller instruction it will controls the motors.
ADVANTAGES
• It requires low power.
• Robotic workers never get tired.
• 24/7 continuous working.
• It can move from one location to another location.
• Can be made to perform even the most dangerous tasks.
• It is simple to operate and is very reliable.
• It reduce the man power.
A1 GLOBAL INSTITUTE OF ENGINEERING AND TECHNOLOGY, MARKAPUR
DISADVANTAGES
• New products require complete reprogramming.
• Cell phone bill.
• When GSM modem fail the robot can not move.
A1 GLOBAL INSTITUTE OF ENGINEERING AND TECHNOLOGY, MARKAPUR
APPLICATIONS1.Military applications
Bomb detection
Surveillance device’
2.Industrial applications
Temperature measurement
Fire detection
3.Scientific applications
In a space vehicles control
4.Search and rescue operation
A1 GLOBAL INSTITUTE OF ENGINEERING AND TECHNOLOGY, MARKAPUR
FUTURESCOPE
Robot can be controlled through voice recognition mechanism.
We can make this security robot to be moved automatically.
We can add different sensors.
We can add camera also.
A1 GLOBAL INSTITUTE OF ENGINEERING AND TECHNOLOGY, MARKAPUR
CONCLUSION:
In our project , the robot is designed to move by our command
and also own according to the command given by the program.
In this project ,we design in such a way that this robot can be
moved anywhere and it can get the information of particular
place.
This project is very much useful in the paces where a human
cannot go into the place like ground canals, smoke oriented
caves.
An alerting message will be sent to a prescribed SIM using GSM
modem.
A1 GLOBAL INSTITUTE OF ENGINEERING AND TECHNOLOGY, MARKAPUR
A1 GLOBAL INSTITUTE OF ENGINEERING AND TECHNOLOGY, MARKAPUR
A1 GLOBAL INSTITUTE OF ENGINEERING AND TECHNOLOGY, MARKAPUR