ITIA-CNR
Model and analysis of a novel piezo-electric rotational motor
based on deformation wave precession
Marco Leonesioa, Nicola Caua,b, Giacomo Bianchia, Paolo
Bonfigliob
aCNR Institute of Industrial Technology and Automation (ITIA),
Milan, ItalybPhiDrive srl, Vimercate (MB), ItalyEUCOMES 2016
20th-23rd of September 2016, Nantes, France
from research . to market
NFare conclusisoni FIR 2001 w w w.fir.de
ContentsMotivation and objectivesOperating principleKinematic
behaviour at steady stateModelling approachConditions for
motionCharacteristic curveConclusions
EUCOMES 2016 20th-23rd of September 2016, Nantes, France
NMotivation and objectivesThe need for small, powerful motors
continues to grow, often combining a greater miniaturization with
higher precision (medical and aerospace sectors): piezo actuated
motors match this increasing demand. (*)
A new promising piezo-motor concept has been patented by
Bonfiglio & Cau in 2015 (**)
This work is aimed at providing a model to support the
preliminary design phase of the above-mentioned piezo-motor
concept.(*) M.S. Vijaya, Piezoelectric Matrials and devices
Applications in Engineering and Medical Sciences, 2013, CRC Press,
Taylor and Francis Group.
(**) Bonfiglio, Paolo, Cau, N. Motor with linear actuators,
PATENT EP2875577 (A1), 2015-05-27 (2015)
EUCOMES 2016 20th-23rd of September 2016, Nantes, France
NOperating principle
Motor Inactive preloadedSteady state stepping
First motion step on pn1
60
EUCOMES 2016 20th-23rd of September 2016, Nantes, France
N
H1) The ring slides on one pin at once, at each step (assured by
command law):H2) At steady state, at each step the deformation wave
moves of 120 (assumption):
H3) Initial condition:
Kinematic behaviour at steady state
: sliding displacement of the ring over the pin m at the step
n
Solution:
EUCOMES 2016 20th-23rd of September 2016, Nantes, France
N
Kinematic behaviour at steady state
EUCOMES 2016 20th-23rd of September 2016, Nantes, France
N
6 nodes ring FEMModelling approach
EUCOMES 2016 20th-23rd of September 2016, Nantes, France
N
Modelling approachPiezos stiffness
Coulombian friction between pins and ring
No friction between piezos and ring ( low friction coatings or
rollers)
EUCOMES 2016 20th-23rd of September 2016, Nantes, France
NConditions for motion
Motor functioning foresees a sequence of steps in which the ring
slides on a single pin while sticking on the other two.
The motor is supposed to exert a torque Cext, that is equivalent
to consider 3 tangential components at pins point equal to
The motor is studied in the condition of ring incipient motion,
i.e., the instants when the system, previously in static
equilibrium, undergoes a small variation in external forces and
starts to move. Since the accelerations and velocities are still
infinitesimal, equations of static equilibrium can be assumed to
hold, with an infinitesimal error.
Incipient motion on PIN 3where is the coulombian friction
coefficient
EUCOMES 2016 20th-23rd of September 2016, Nantes, France
N
FIR 2001 w w w.fir.de
Conditions for motion
Expliciting the terms
where
P3P2P1Cext=0d1=d2=d3=0R=15mm, E=210GParing height: h=6mm ring
width: b=2mm Kpz=66N/m=0.2=0.025mmpmax=0.012mm
Solution locus
EUCOMES 2016 20th-23rd of September 2016, Nantes, France
N
FIR 2001 w w w.fir.de
Conditions for motion
Cext= -6Nmd1=d2=d3=0
Cext=
-6Nmd1=1/3*S=0.0017mmd2=2/3*S=0.0034mmd3=S=0.0050mmSolution locus
corresponding to the motion against the torque shrinks, the other
expands.Solution locus corresponding to the motion against the
torque translates toward higher piezo displacements on p2.Effect of
external torqueEffect of sliding displacement
EUCOMES 2016 20th-23rd of September 2016, Nantes, France
N
Conditions for motion
Effect of frictionEffect of sliding displacementIncreasing
friction, the solution locus enlarges, but moves towards higher
values of piezo displacements. Namely, higher torque can be
transmitted, but by more performant piezos. Increasing piezos
maximum range, the solution locus enlarges. Namely, higher torques
can be transmitted. Cext= -6Nmd1=d2=d3=0 from 0.2 to 0.4Cext=
-6Nmd1=d2=d3=0pmax from 0.012 to 0.1 = 0.4
EUCOMES 2016 20th-23rd of September 2016, Nantes, France
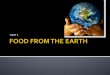
NCharacteristic curveConsidering the steady state periodic
motion, the limiting condition happens at the end of the step, when
the maximum ring deformation occurs.
During this stepping phase pins 1 and 2 must be in stiction
while the tangential reaction on the ring sliding clockwise at pin
3 (T5) must be negative:
Selecting a 3-uple [p1, p2, p3,], the last equation becomes a
straightline in the plane Text S, that becomes a segment when
limited by the other two inequalities. By scanning a proper mesh in
the space of piezo displacements, it is possible to obtain the
characteristic curve of the motor.(N.B.: Given the commutation
frequency of piezo
EUCOMES 2016 20th-23rd of September 2016, Nantes, France
NCharacteristic curve
-2000-1500-1000-5000500100015002000External Torque (motor