
Multi-Objective Optimization Model for Partner Selection in a
Market-Oriented Dynamic Collaborative Cloud Service Platform
Abstract
In this paper, we propose a promising multi-objective
(MO) optimization model for partner selection in a
market-oriented dynamic collaboration (DC) platform of
Cloud providers (CPs) to minimize the conflicts among
providers that may happen when negotiating among
providers. The model not only uses their individual
information (INI) but also past collaborative relationship
information (PRI) for partner selection which is seldom
considered in existing approaches. A multi-objective
genetic algorithm (MOGA) called MOGA-IC is also
proposed to solve the model as the model is NP-hard. The
algorithm is developed using two popular MOGAs- NSGA-
II and SPEA2. The experimental results show that MOGA-
IC with NSGA-II outperformed the MOGA-IC with SPEA2
in finding useful Pareto optimal solution sets. In addition,
other simulation experiments are conducted to verify the
effectiveness of the MOGA-IC in terms of satisfactory
partner selection and conflicts minimization.
Keywords: Cloud market, combinatorial auction,
dynamic collaboration, partner selection, MOGA.
1. Introduction
In today's world the emerging Cloud computing [1] offer a new computing model where resources such as computing power, storage, online applications and networking infrastructures can be shared as ‘services’ over the internet. However, currently interoperability and scalability are two major challenging issues for Cloud computing [2]. To handle these issues, in our previous work [3], we proposed a novel combinatorial auction (CA) based Cloud market model called CACM with a new auction policy that facilitates a virtual organization (VO) based dynamic collaboration (DC) platform among CPs. In a DC platform, each CP can share their own local resources/services with other partner CPs and hence can get access to much larger pools of resources/services. Also each provider can maximize their profit by offering existing service capabilities to collaborative partners, so they may mash-up existing services into a new value add collaborative service. One of the major challenges in the market-oriented DC platform is to minimize the large number of conflicts that may happen when negotiating among CPs. One reason is
that each provider must agree with resource/service contributed by other providers against a set of its own policies in DC [4]. Another one is due to the inclusion of high collaboration costs (e.g. network establishment, information transmission, capital flow etc.) by the providers with their bidding prices as they do not know to whom they need to collaborate after winning the auctions. To address the issue of conflicts minimization among providers, we proposed a new auction policy in our previous work that allows a CP (primary CP) to dynamically collaborate with suitable partner CPs to form a group before joining the auction and to publish their group bids as a single bid to fulfill the service requirements completely, along with other CPs, who publishes separate bids to partially fulfill the service requirements. This new approach can create more chances to win the auctions for the group since collaboration cost, negotiation time and conflicts among CPs can be minimized. However, finding a good combination of CP partners to make group is a NP hard problem [5] which was not addressed in our previous work. The partner selection problem (PSP) for CPs is different from other PSP problems in areas like manufacturing, supply chain or virtual enterprise since a large number of conflicts happen among providers due to DC. So we believe that the initiator/primary CP (pCP) needs to choose a best combination of partners not only based on their individual information (INI) but also considering their past collaborative relationship information (PRI) [6]. The success of past collaboration between participating CPs may reduce uncertainty and conflicts, short adaptation duration, and also help to the performance promotion. So far, few methods are found to solve the problem of partner selection using the individual and collaborative information. Whereas, it can be found that a lot of scholars adopt quantitative methods to solve the problems of partner selection in other backgrounds [7-18]. For instance, Sha and Che [9] adopted AHP to determine the weights vector of attributes and then presented a linear scoring model to select members to form a multi-echelon manufacturing system. In [7], a genetic algorithm solution for collaboration cost optimization-oriented partner selection is developed. Fuqing and Yi et al. [11] used an R-GA with embedded project scheduling to solve the multi-objective optimization model of PSP in a virtual
Mohammad Mehedi Hassan, Biao Song, Seung-Min Han and Eui-Nam Huh
Department of Computer Engineering Kyung Hee University, Global Campus, South Korea
E-mail: {hassan, bsong, johnhuh}@khu.ac.kr
Changwoo Yoon and Won Ryu IPTV Department
Electronics and Telecommunications Research Institute Daejeon, South Korea
E-mail: {cwyoon, wlyu}@etri.re.kr
2009 21st IEEE International Conference on Tools with Artificial Intelligence
1082-3409/09 $26.00 © 2009 IEEE
DOI 10.1109/ICTAI.2009.79
637
enterprise. Chen et al. [13] proposed a novel group recommendation system. The system is designed based on the framework of collaborative filtering and uses genetic algorithm to predict the possible interactions among group members. However, it is difficult to directly adopt the existing methods to solve the partner selection of CPs as the existing methods do not consider the use of collaborative information between partners which associates with a pair of partners, which can be represented in the form of collaborative information matrix. Therefore, in this paper, we propose a promising model for quantitatively evaluating the CP partners required for making groups using their individual and collaborative relationship information, and an effective algorithm called MOGA-IC (Multi-Objective Genetic Algorithm using Individual and Collaborative information) for selecting best combination of partners. We develop the MOGA-IC using the two popular MOGAs- NSGA-II [19] and SPEA2 [20] to find an appropriate diversity preservation mechanism in selection operators to enhance the yield of Pareto optimal solutions during optimization having multiple conflicting objectives. A numerical example is presented to illustrate the proposed MOGA-IC with NSGA-II and SPEA2. In addition, we develop MOGA-I (Multi-Objective Genetic Algorithm using Individual information), an existing partner selection algorithm, to validate the proposed MOGA-IC performance in the CACM model. Simulation experiments are conducted to show the effectiveness of the proposed MOGA-IC as compare to MOGA-I, in terms of satisfactory partner selection and conflicts minimization. The rest of this paper is organized as follows: Section 2 gives an overview of our proposed CACM model. Section 3 describes multi-objective model for CP partner selection. In Section 4, we present the MOGA-IC with NSGA-II and SPEA2. In Section 5, simulation results are presented to show the effectiveness of the MOGA-IC in CACM model and we conclude our work by presenting summary and future directions in Section 6.
2. Proposed Combinatorial Auction (CA)
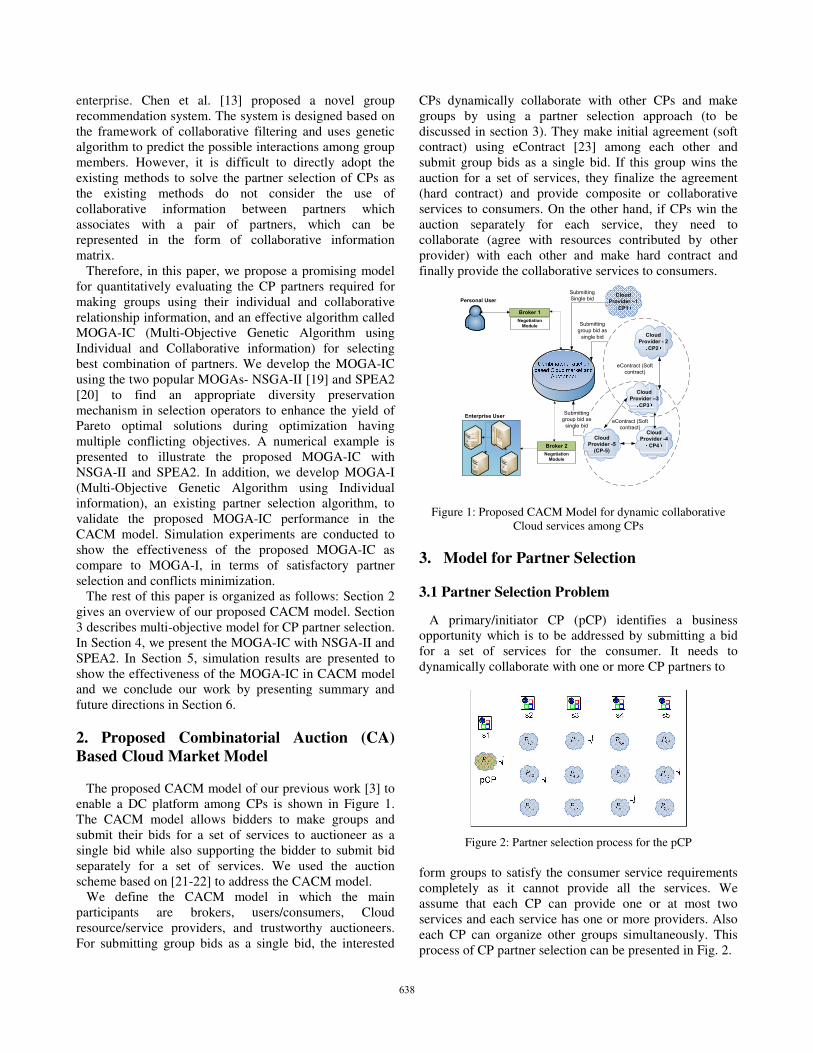
Based Cloud Market Model The proposed CACM model of our previous work [3] to enable a DC platform among CPs is shown in Figure 1. The CACM model allows bidders to make groups and submit their bids for a set of services to auctioneer as a single bid while also supporting the bidder to submit bid separately for a set of services. We used the auction scheme based on [21-22] to address the CACM model. We define the CACM model in which the main participants are brokers, users/consumers, Cloud resource/service providers, and trustworthy auctioneers. For submitting group bids as a single bid, the interested
CPs dynamically collaborate with other CPs and make groups by using a partner selection approach (to be discussed in section 3). They make initial agreement (soft contract) using eContract [23] among each other and submit group bids as a single bid. If this group wins the auction for a set of services, they finalize the agreement (hard contract) and provide composite or collaborative services to consumers. On the other hand, if CPs win the auction separately for each service, they need to collaborate (agree with resources contributed by other provider) with each other and make hard contract and finally provide the collaborative services to consumers.
Personal User
Enterprise User
Broker 1Combinatorial auction based Cloud market and AuctioneerCloud
Provider –1
CP1
Cloud
Provider - 2
CP2
Cloud
Provider –3
CP3
Cloud
Provider -4
CP4
Cloud
Provider -5
(CP-5)
Submitting
Single bid
Submitting
group bid as
single bid
Broker 2
Submitting
group bid as
single bideContract (Soft
contract)
eContract (Soft
contract)
Negotiation
Module
Negotiation
Module
Figure 1: Proposed CACM Model for dynamic collaborative
Cloud services among CPs
3. Model for Partner Selection
3.1 Partner Selection Problem
A primary/initiator CP (pCP) identifies a business opportunity which is to be addressed by submitting a bid for a set of services for the consumer. It needs to dynamically collaborate with one or more CP partners to
Figure 2: Partner selection process for the pCP
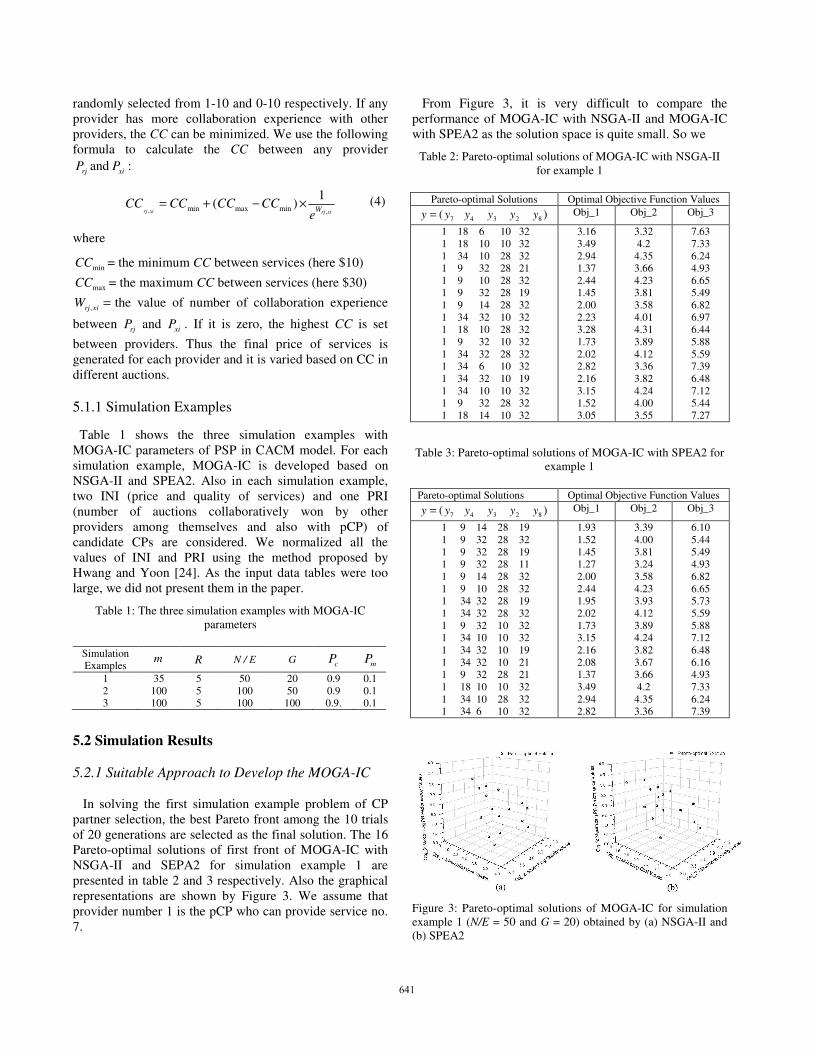
form groups to satisfy the consumer service requirements completely as it cannot provide all the services. We assume that each CP can provide one or at most two services and each service has one or more providers. Also each CP can organize other groups simultaneously. This process of CP partner selection can be presented in Fig. 2.
638

Fig. 2 shows that the pCP ( 1,1P ) can provide s1 service
and needs other 4 CP partners among 12 candidate CP partners to provide total 5 kinds of consumer service requirements (s1, s2, s3, s4 and s5). We also assume that the pCP has the INI and PRI of all the other providers for each service. The INI includes price and quality information of services of other providers which are the most important factors. The PRI includes number of projects/auctions accomplished/won by other providers among themselves and also with pCP. The pCP can get all of these information from each CPs website, market and also from consumers feedback about their services.
3.2 MO Optimization Problem for Partner
Selection
For the convenience of analysis, the parameters and variables for partner selection are defined as follows:
{ 1... }:j
R R j n= = a set of n service requirements of
consumer
{ 1... }:r
P P r m= = a set of m Cloud providers who
participate in the auction as bidders
rjP = a Cloud provider r who can provide service j
rjφ = the price of CP r for providing service j separately
rjQ = the quality value for service j of CP r (qualitative
information can be expressed by the assessment values from 1 to 10 (1: very bad, 10: very good))
,rj xiW = the value of past collaboration experience (i.e.
number of times collaboratively win the auctions ) between provider r for service j and provider x for service i where ( , 1.... ; , 1.... ; )r x m i j n i j= = ≠
{ 1..... , 1.... }:rjU U r m j n= = = a decision vector of partner
selection. The optimized goal is selecting a group of CP partners who collaboratively win the auctions many times (maximizing past relationship performance values) and making the individual price lowest and quality value of service highest. In the most situations, it is impossible that there is a candidate provider group that can make all the goals optimized. So to solve the partner selection problem of a pCP using the INI and PRI, a multi-objective (MO) optimization model to minimize total price and maximize total collaborative past relationship (PR) performance and service quality values can be expressed mathematically as follows:
1 1
Minimize Obj_1 n m
rj rj
j r
Uφ= =
=∑∑
1 1
Maximuze Obj_2 n m
rj rj
j r
Q U= =
=∑∑
,
, 1 , 1
Maximize Obj_3 n m
rj xi rj xi
i j r xi j
W U U= =
≠
= ∑ ∑
subjec to
1 if choose
0 otherwise
1 if choose and
0 otherwise
rj
rj
rj xi
rj xi
PU
P PU U
=
=
4. Multi-Objective (MO) Genetic Algorithm
In the CP partner selection problem, MO optimization is preferable because it provides a decision-maker (pCP) with several trade-off solutions to choose from. As the CP partner selection problem has multiple conflicting objectives- minimization of the price of service while maximization of past relationship performance and service quality values, multiple objective formulations are practically required for concurrent optimization that yields optimal solutions that balance the conflicting relationships among the objectives. MO optimization yields a set of Pareto optimal solutions, which is a set of solutions that are mutually non-dominated [19-20]. MO optimization difficulties can be alleviated by avoiding multiple simulation runs, doing without artificial aids such as weighted sum approaches, using efficient population-based evolutionary algorithms, and the concept of dominance. The use of multi-objective GAs (MOGAs) provides a decision-maker with the practical means to handle MO optimization problems. When solving PSP for CPs using MOGA techniques, one important issue need to be addressed: how to find an appropriate diversity preservation mechanism in selection operators to enhance the yield of Pareto optimal solutions during optimization, particularly for the CP partner selection problems having multiple conflicting objectives. So we develop the MOGA-IC with two popular MOGAs- the non dominated sorting genetic algorithm (NSGA-II) and the strength Pareto evolutionary genetic algorithm (SPEA2)[20], both of which include an excellent mechanism for preserving population diversity in the selection operators. In this section, the MOGA-IC is designed for the proposed model of CP partner selection as follows: The natural number encoding is adopted to represent the chromosome of individual. A chromosome of an individual is an ordered list of CPs. Let
1 2[ , , ..., ...... ] ( 1, 2,.... ),j n j
y y y y y j n y= = is a gene of
the chromosome, its value is between 1 and m (for service
j, there are m CPs to response). If 50m = and 5n = , there
may be 10 CPs who can provide each service j . So total 510 possible solutions available. In this way the initial
populations are generated. Two-point crossover is
(1)
(2)
(3)
639

employed and in case of mutation, randomly one provider is changed for any service. For the selection operator in the proposed MOGA-IC, NSGA-II and SPEA2 are implemented. Three objective functions (i.e. price, quality of service and collaboration experience) are optimized by NSGA-II and SPEA2. The complete procedures to develop the MOGA-IC with NSGA-II and SPEA2 are given below.
Algorithm 1: NGSA-II Step 1: Initialize the input parameters which contain the number of requirements (R), providers (m) and maximum genetic generations (G), population size (N), crossover
probability ( )c
p and mutation probability ( )m
p .
Step 2: Generate the initial parent population , ( 0)t
P t = of
sizeP
N .
Step 3: Apply binary tournament selection strategy to the current population, and generate the offspring population
tO of size
O PN N= with the predetermined
cp and
mp .
Step 4: Sett t t
S P O= ∪ , apply a non-dominated sorting
algorithm and identify different fronts 1 2, ...a
F F F .
Step 5: If the stop criterion ( t G> ) is satisfied, stop and
return the individuals (solutions) in population t
P and their
corresponding objective values as the Pareto-(approximate) optimal solutions and Pareto-optimal fronts.
Step 6: Set new population 1 0t
P+ = . Set counter 1i = . Until
1t iP F N+ + ≤ set 1 1t t i
P P F+ += ∪ and 1i i= + .
Step 7: Perform the crowding-sort procedure and include
the most widely spread ( )1tN P+− solutions found using
the crowding distance values in sorted F in 1tP+ .
Step 8: Apply binary tournament selection, crossover and
mutation operators to 1tP+ to create offspring
population 1tO + .
Step 9: Set 1t t= + , then return to Step 4.
Algorithm 2: SPEA2
Step 1: Generate a random population 0P of sizeP
N Set
0t = and an empty external archive 0E of size E
N .
Step 2: Calculate the fitness of each solution x in t t
P E∪ as
follows: Step 2.1: Calculate the raw fitness as
,( , ) ( , )
t ty P E y xR x t S y t
∈=∑ ∪ �
where ( , )S y t is the number
of solutions in t t
P E∪ dominated by solution y.
Step 2.2: Calculate the density as 1( , ) ( 2)k
xD x t σ −= + ,
where k
xσ is the distance between solution x and its kth
nearest neighbor, where p Ek N N= + .
Step 2.3: Assign a fitness value as
( , ) ( , ) ( , )F x t R x t D x t= + .
Step 3: Copy all non-dominated solutions in t t
P E∪ to
1tE + .
Now, two cases may arise. Case 1: If 1t EE N+ > , then
truncate 1t EE N+ − solutions by iteratively removing
solutions that have maximum kσ distances. Break any tie
by examining lσ for 1,....., ,1l k= − sequentially. Case 2:
If 1t EE N+ ≤ , copy the best 1E t
N E +− dominated
solutions according to their fitness values from t t
P E∪ to
1tE + .
Step 4: If the stopping criterion is satisfied, stop and copy
the non-dominated solutions in 1tE + .
Step 5: Select the parent from 1tE + using binary
tournament selection with replacement. Step 6: Apply the crossover and mutation operator to the parents to create N offspring solutions. Copy offspring to
1, 1t
P t t+ = + , then return to Step2.
5 Evaluation
In this section, we present a simulation example of PSP for a pCP in the CACM model. It is used to illustrate the proposed MOGA-IC method. NSGA-II and SPEA2 are utilized to develop the MOGA-IC. Further simulation examples are conducted to pinpoint the most viable approach (NSGA-II or SPEA2) for MOGA-IC. Moreover, we implement the existing MOGA that uses only INI called MOGA-I for CP partner selection and analyze its performance with MOGA-IC in the proposed CACM model. We implement the CACM model (winner determination algorithm) with new auction policy as well as the MOGA-IC in Visual C++.
5.1 Evaluation Methodology
One of the main challenges in the CACM model and the PSP of CP is the lack of real-world input data. So we conduct the experiments using synthetic data. We generate the input data as follows: Many CPs (m = 100) with different services and also some consumer requirements (R = 3-10) are generated randomly. We assume that each CP can provide at most 2 services so that they have to collaborate with others to fulfill the service requirements R. Each service may have one or more CPs. Based on R, CPs are selected. So it is possible that every CP may not provide the required R. Also the cost of providing any independent service is randomly generated from $80 to $100. The ranges of collaboration cost (CC) of services as well as the profit are set within $10 - $30 and $10 - $20 respectively. Quality and collaborative performance values of providers are
640
randomly selected from 1-10 and 0-10 respectively. If any provider has more collaboration experience with other providers, the CC can be minimized. We use the following formula to calculate the CC between any provider
rjP and
xiP :
, ,min max min
1( )
rj xi rj xiWCC CC CC CC
e= + − ×
where
minCC = the minimum CC between services (here $10)
maxCC = the maximum CC between services (here $30)
,rj xiW = the value of number of collaboration experience
between rj
P and xi
P . If it is zero, the highest CC is set
between providers. Thus the final price of services is generated for each provider and it is varied based on CC in different auctions.
5.1.1 Simulation Examples
Table 1 shows the three simulation examples with MOGA-IC parameters of PSP in CACM model. For each simulation example, MOGA-IC is developed based on NSGA-II and SPEA2. Also in each simulation example, two INI (price and quality of services) and one PRI (number of auctions collaboratively won by other providers among themselves and also with pCP) of candidate CPs are considered. We normalized all the values of INI and PRI using the method proposed by Hwang and Yoon [24]. As the input data tables were too large, we did not present them in the paper.
Table 1: The three simulation examples with MOGA-IC parameters
Simulation Examples
m R N / E G cP
mP
1 35 5 50 20 0.9 0.1 2 100 5 100 50 0.9 0.1 3 100 5 100 100 0.9. 0.1
5.2 Simulation Results
5.2.1 Suitable Approach to Develop the MOGA-IC In solving the first simulation example problem of CP partner selection, the best Pareto front among the 10 trials of 20 generations are selected as the final solution. The 16 Pareto-optimal solutions of first front of MOGA-IC with NSGA-II and SEPA2 for simulation example 1 are presented in table 2 and 3 respectively. Also the graphical representations are shown by Figure 3. We assume that provider number 1 is the pCP who can provide service no. 7.
From Figure 3, it is very difficult to compare the performance of MOGA-IC with NSGA-II and MOGA-IC with SPEA2 as the solution space is quite small. So we
Table 2: Pareto-optimal solutions of MOGA-IC with NSGA-II for example 1
Pareto-optimal Solutions Optimal Objective Function Values
7 4 3 2 8( )y y y y y y= Obj_1 Obj_2 Obj_3
1 18 6 10 32 1 18 10 10 32 1 34 10 28 32 1 9 32 28 21 1 9 10 28 32 1 9 32 28 19 1 9 14 28 32 1 34 32 10 32 1 18 10 28 32 1 9 32 10 32 1 34 32 28 32 1 34 6 10 32 1 34 32 10 19 1 34 10 10 32 1 9 32 28 32 1 18 14 10 32
3.16 3.49 2.94 1.37 2.44 1.45 2.00 2.23 3.28 1.73 2.02 2.82 2.16 3.15 1.52 3.05
3.32 4.2
4.35 3.66 4.23 3.81 3.58 4.01 4.31 3.89 4.12 3.36 3.82 4.24 4.00 3.55
7.63 7.33 6.24 4.93 6.65 5.49 6.82 6.97 6.44 5.88 5.59 7.39 6.48 7.12 5.44 7.27
Table 3: Pareto-optimal solutions of MOGA-IC with SPEA2 for example 1
Pareto-optimal Solutions Optimal Objective Function Values
7 4 3 2 8( )y y y y y y= Obj_1 Obj_2 Obj_3
1 9 14 28 19 1 9 32 28 32 1 9 32 28 19 1 9 32 28 11 1 9 14 28 32 1 9 10 28 32 1 34 32 28 19 1 34 32 28 32 1 9 32 10 32 1 34 10 10 32 1 34 32 10 19 1 34 32 10 21 1 9 32 28 21 1 18 10 10 32 1 34 10 28 32 1 34 6 10 32
1.93 1.52 1.45 1.27 2.00 2.44 1.95 2.02 1.73 3.15 2.16 2.08 1.37 3.49 2.94 2.82
3.39 4.00 3.81 3.24 3.58 4.23 3.93 4.12 3.89 4.24 3.82 3.67 3.66 4.2
4.35 3.36
6.10 5.44 5.49 4.93 6.82 6.65 5.73 5.59 5.88 7.12 6.48 6.16 4.93 7.33 6.24 7.39
Figure 3: Pareto-optimal solutions of MOGA-IC for simulation example 1 (N/E = 50 and G = 20) obtained by (a) NSGA-II and (b) SPEA2
(4)
641
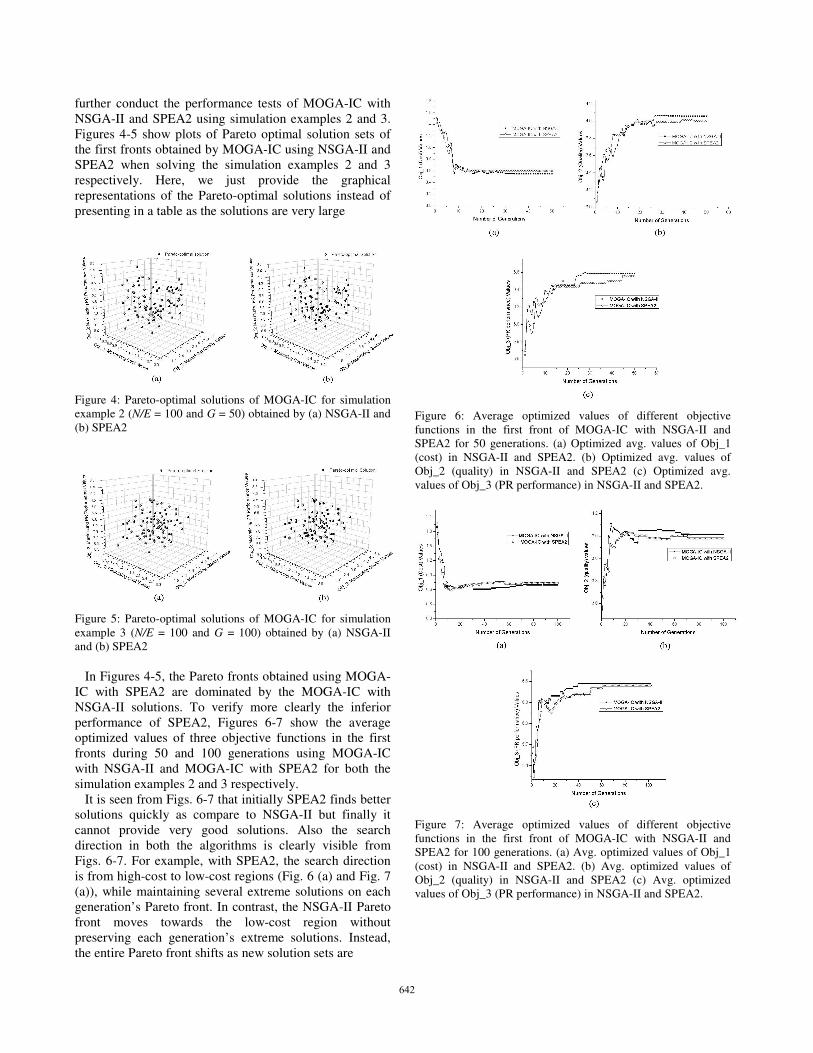
further conduct the performance tests of MOGA-IC with NSGA-II and SPEA2 using simulation examples 2 and 3. Figures 4-5 show plots of Pareto optimal solution sets of the first fronts obtained by MOGA-IC using NSGA-II and SPEA2 when solving the simulation examples 2 and 3 respectively. Here, we just provide the graphical representations of the Pareto-optimal solutions instead of presenting in a table as the solutions are very large
Figure 4: Pareto-optimal solutions of MOGA-IC for simulation example 2 (N/E = 100 and G = 50) obtained by (a) NSGA-II and (b) SPEA2
Figure 5: Pareto-optimal solutions of MOGA-IC for simulation example 3 (N/E = 100 and G = 100) obtained by (a) NSGA-II and (b) SPEA2
In Figures 4-5, the Pareto fronts obtained using MOGA-IC with SPEA2 are dominated by the MOGA-IC with NSGA-II solutions. To verify more clearly the inferior performance of SPEA2, Figures 6-7 show the average optimized values of three objective functions in the first fronts during 50 and 100 generations using MOGA-IC with NSGA-II and MOGA-IC with SPEA2 for both the simulation examples 2 and 3 respectively. It is seen from Figs. 6-7 that initially SPEA2 finds better solutions quickly as compare to NSGA-II but finally it cannot provide very good solutions. Also the search direction in both the algorithms is clearly visible from Figs. 6-7. For example, with SPEA2, the search direction is from high-cost to low-cost regions (Fig. 6 (a) and Fig. 7 (a)), while maintaining several extreme solutions on each generation’s Pareto front. In contrast, the NSGA-II Pareto front moves towards the low-cost region without preserving each generation’s extreme solutions. Instead, the entire Pareto front shifts as new solution sets are
Figure 6: Average optimized values of different objective functions in the first front of MOGA-IC with NSGA-II and SPEA2 for 50 generations. (a) Optimized avg. values of Obj_1 (cost) in NSGA-II and SPEA2. (b) Optimized avg. values of Obj_2 (quality) in NSGA-II and SPEA2 (c) Optimized avg. values of Obj_3 (PR performance) in NSGA-II and SPEA2.
Figure 7: Average optimized values of different objective functions in the first front of MOGA-IC with NSGA-II and SPEA2 for 100 generations. (a) Avg. optimized values of Obj_1 (cost) in NSGA-II and SPEA2. (b) Avg. optimized values of Obj_2 (quality) in NSGA-II and SPEA2 (c) Avg. optimized values of Obj_3 (PR performance) in NSGA-II and SPEA2.
642
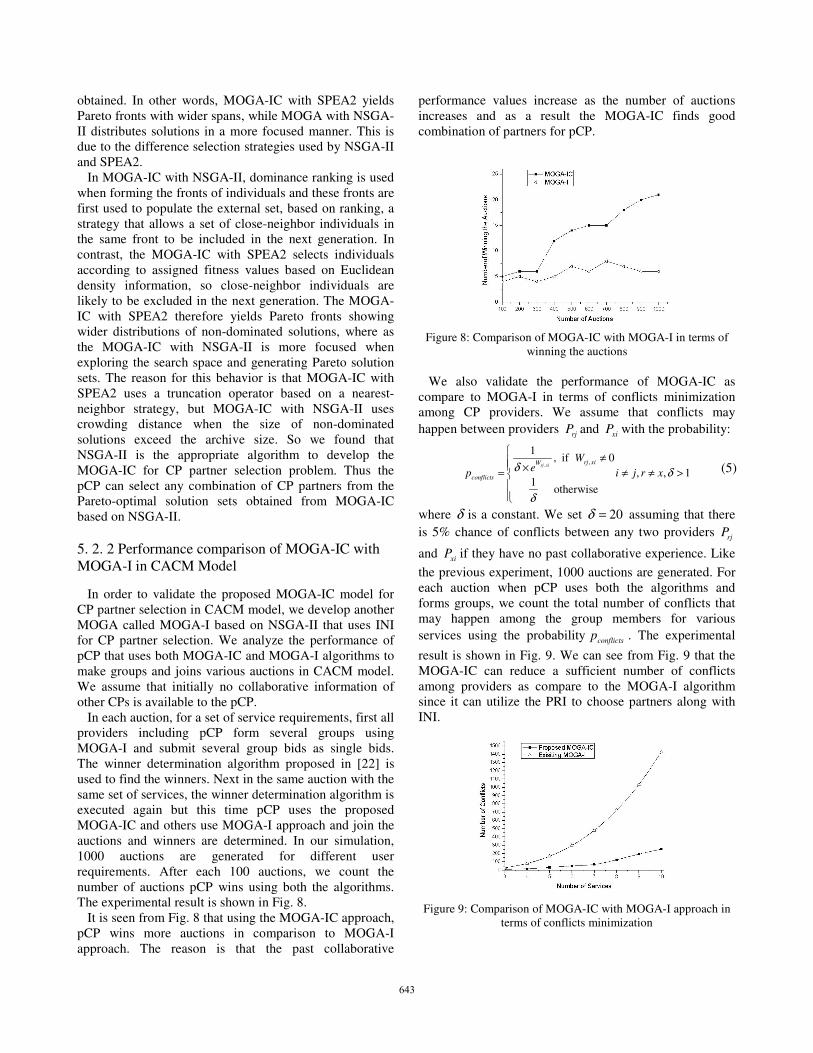
obtained. In other words, MOGA-IC with SPEA2 yields Pareto fronts with wider spans, while MOGA with NSGA-II distributes solutions in a more focused manner. This is due to the difference selection strategies used by NSGA-II and SPEA2. In MOGA-IC with NSGA-II, dominance ranking is used when forming the fronts of individuals and these fronts are first used to populate the external set, based on ranking, a strategy that allows a set of close-neighbor individuals in the same front to be included in the next generation. In contrast, the MOGA-IC with SPEA2 selects individuals according to assigned fitness values based on Euclidean density information, so close-neighbor individuals are likely to be excluded in the next generation. The MOGA-IC with SPEA2 therefore yields Pareto fronts showing wider distributions of non-dominated solutions, where as the MOGA-IC with NSGA-II is more focused when exploring the search space and generating Pareto solution sets. The reason for this behavior is that MOGA-IC with SPEA2 uses a truncation operator based on a nearest-neighbor strategy, but MOGA-IC with NSGA-II uses crowding distance when the size of non-dominated solutions exceed the archive size. So we found that NSGA-II is the appropriate algorithm to develop the MOGA-IC for CP partner selection problem. Thus the pCP can select any combination of CP partners from the Pareto-optimal solution sets obtained from MOGA-IC based on NSGA-II.
5. 2. 2 Performance comparison of MOGA-IC with MOGA-I in CACM Model
In order to validate the proposed MOGA-IC model for CP partner selection in CACM model, we develop another MOGA called MOGA-I based on NSGA-II that uses INI for CP partner selection. We analyze the performance of pCP that uses both MOGA-IC and MOGA-I algorithms to make groups and joins various auctions in CACM model. We assume that initially no collaborative information of other CPs is available to the pCP. In each auction, for a set of service requirements, first all providers including pCP form several groups using MOGA-I and submit several group bids as single bids. The winner determination algorithm proposed in [22] is used to find the winners. Next in the same auction with the same set of services, the winner determination algorithm is executed again but this time pCP uses the proposed MOGA-IC and others use MOGA-I approach and join the auctions and winners are determined. In our simulation, 1000 auctions are generated for different user requirements. After each 100 auctions, we count the number of auctions pCP wins using both the algorithms. The experimental result is shown in Fig. 8. It is seen from Fig. 8 that using the MOGA-IC approach, pCP wins more auctions in comparison to MOGA-I approach. The reason is that the past collaborative
performance values increase as the number of auctions increases and as a result the MOGA-IC finds good combination of partners for pCP.
Figure 8: Comparison of MOGA-IC with MOGA-I in terms of
winning the auctions
We also validate the performance of MOGA-IC as compare to MOGA-I in terms of conflicts minimization among CP providers. We assume that conflicts may
happen between providers rj
P and xi
P with the probability:
,,
1, if 0
, , 11
otherwise
rj xirj xiW
conflicts
We
p i j r xδ δ
δ
≠ ×= ≠ ≠ >
where δ is a constant. We set 20δ = assuming that there
is 5% chance of conflicts between any two providers rj
P
and xi
P if they have no past collaborative experience. Like
the previous experiment, 1000 auctions are generated. For each auction when pCP uses both the algorithms and forms groups, we count the total number of conflicts that may happen among the group members for various
services using the probabilityconflicts
p . The experimental
result is shown in Fig. 9. We can see from Fig. 9 that the MOGA-IC can reduce a sufficient number of conflicts among providers as compare to the MOGA-I algorithm since it can utilize the PRI to choose partners along with INI.
Figure 9: Comparison of MOGA-IC with MOGA-I approach in
terms of conflicts minimization
(5)
643
6 Conclusion The paper presents a novel multi-objective optimization model of CP partner selection using the individual and past collaborative information in a market-oriented dynamic collaborative Cloud services platform. An effective MOGA called MOGA-IC with NSGA-II is also developed to solve the model. The simulation results show that the MOGA-IC with NSGA-II is superior to the MOGA-IC with SPEA2 for solving the partner selection problem of CPs. Also in comparison to existing MOGA-I approach; MOGA-IC with NSGA-II shows better performance results in CP partner selection as well as conflicts minimization among CPs in the DC model. In future, we will try to simulate the proposed MOGA-IC model with real world data to verify its economic efficiency and performance.
Acknowledgement
This work was supported by the IT R&D program of KCC/MKE/KEIT [2009-S-018-01, Development of Open- IPTV Platform Technologies for IPTV Convergence Service and Content Sharing].
References
[1] A. Weiss. Computing in the Clouds. netWorker, 11(4):16-25, Dec. 2007.
[2] Interoperability: A key Challenge for Cloud Computing http://www.lightreading.com/document.asp?doc_id=172033
[3] B. Song, M. M. Hassan and E-N. Huh. A Novel Cloud Market Infrastructure f or Trading Service. In Proc. of Intl. Conf. on Computational Science and Its Applications (ICCSA), vol. 1, pp. 44-50, Suwon, South Korea, 2009.
[4] S. Nepal, and J. Zic. A Conflict Neighboring Negotiation Algorithm for Resource Services in Dynamic Collaboration. In Proc. of the IEEE Int. Conf. on Services Computing, 2008.
[5] C.S. Ko, T. Kim, and H. Hwang. External partner selection using tabu search heuristics in distributed manufacturing. Int. Journal of Production Research, 2001, 39(17), 3959–3974.
[6] R. Cowan, N. Jonard et al. Bilateral collaboration and the emergence of innovation networks. Management Science, 53, 1051–1067, 2007.
[7] Z-J. Wang, X-F. XU et al. Genetic Algorithms for collaboration cost optimization-oriented partner selection in virtual enterprises. International Journal of Production
Research, Vol.47, No. 4, Feb. 2009. [8] G. Büyüközkan, O. Feyzioglu and E. Nebol. Selection of the
strategic alliance partner in logistics value chain. International Journal of Production Economics, 113, 148–158, 2008.
[9] D. Y. Sha, and Z. H. Che. Virtual integration with a multi-criteria partner selection model for the multi-echelon manufacturing system. International Journal of Advanced Manufacturing Technology, vol. 25, pp. 793–802 (2005).
[10] W. H. Ip, M. Huang, K. L. Yung et al. Genetic algorithm solution for a risk-based partner selection problem in a virtual enterprise. Computers & Operations Research, 30, 213–231, 2003.
[11] Z. Fuqing; H. Yi and Y. Dongmei. A multi-objective optimization model of the partner selection problem in a virtual enterprise and its solution with genetic algorithms. Int J. of Adv. Manufacturing Technology, Vol. 37:1220, 2008.
[12] F. Cheng, F. Ye and J. Yang. Multi-objective optimization of collaborative manufacturing chain with time-sequence constraints. Int J Adv Manuf. Technol, 2009, 40:1024–1032.
[13] Y. L. Chen, L. C. Cheng, and C. N. Chuang. A group recommendation system with consideration of interactions among group members. Expert Systems with Applications, 34, 2082–2090, 2008.
[14] M. Kaya. MOGAMOD: Multi-objective genetic algorithm for motif discovery, Expert Systems with Applications, Vol. 36:2, 2009.
[15] A. Amid, S. H. Ghodsypour and C. O. Brien. Fuzzy multi-objective linear model for supplier selection in a supply chain. International Journal of Production Economics, vol. 104, pp. 394–407 (2006).
[16] Chang, S. L., Wang, R. C. et al. Applying fuzzy linguistic quantifier to select supply chain partners at different phases of product life cycle. International Journal of Production
Economics, vol. 100, pp. 348–359 (2006). [17] Chen, H. H., Lee, A. H. I. and Tong, Y. Prioritization and
operations NPD mix in a network with strategic partners under uncertainty. Expert Systems with Applications, vol. 33, pp. 337–346 (2007)
[18] Saen, R. F. Supplier selection in the presence of both cardinal and ordinal data. European Journal of Operational Research, vol. 183, pp. 741–747 (2007).
[19] K. Deb, A. Pratap, S. Agarwal et al. A fast and elitist multiobjective genetic algorithm: NSGA-II. IEEE Transactions on Evolutionary Computation, 6, 182–197, 2002.
[20] Zitzler, E., Laumanns, M. and Thiele. L. SPEA2: Improving the strength Pareto evolutionary algorithm.TIK Report no. 103, Swiss Federal Institute of Technology, (2001).
[21] Suzuki, K. and Yokoo, M. Secure generalized Vickery auction using homomorphic encryption. In Proc. of 7th Int. Conf. on Financial Cryptography, LNCS, Springer, Vol. 2742, pp. 239-249 (2003).
[22] Yokoo, M. and Suzuki, K. Secure Multi-agent Dynamic Programming based on Homomorphic Encryption and its Application to Combinatorial Auctions. In Proc. of the first joint Int. Conf. on Autonomous Agents and Multi-agent Systems, ACM Press, vol. 1, pp. 112-119 (2002).
[23] Chen, S., Nepal, S., Wang, C. and Zic. J. Facilitating Dynamic Collaborations with eContract Services. In proceeding of 2008 IEEE International Conference on Web Services, vol. 1, pp. 521-528 (2008).
[24] C. L. Hwang, and K. Yoon. Multiple attribute decision making: Methods and applications. Berlin: Springer, 1981.
644
Recommended

















