Embed Size (px)
Citation preview

HASC ミーティング 2015
角速度センサによる歩行および階段昇降の識別
2016/01/20 ( 水 )名田 太河
1/10
滋賀県立大学 工学部 電子システム工学科ネットワーク情報工学分野
名田 太河宮城 茂幸 准教授
ライトニングトーク

1. 概要–背景
• 加速度を用いた閾値等による歩行と階段昇降の識別は難しい。
• 脚の角度による識別を行った研究 [1] がある。
–目標
• ポケット内のスマートフォンの角速度センサーにより歩行と階段昇降時の角度の違いを求め各状態の識別を行う。
2016/01/20 ( 水 )名田 太河
2/10[1] Diaz, E. (2015). Inertial Pocket Navigation System: Unaided 3D Positioning. Sensors, 15(4), 9169.

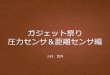
2. 先行研究–歩行時の平均値と比較
–脚の角度は角速度、加速度センサより推定• 角速度センサーの積分値ではドリフト誤差が生じる。
2016/01/20 ( 水 )名田 太河
3/10
図 1: 脚の角度による歩行状態の識別結果Diaz, E. (2015). Inertial Pocket Navigation System: Unaided 3D Positioning. Sensors, 15(4), 9169. から引用
階段上昇 階段下降歩行

3. 前提条件–重力加速度と進行方向に垂直な軸を
脚に生じる角速度として利用• 主に一軸に歩行による角度変動が現れると想定する。
–歩行状態はバッチ式に識別• オフセット補正に静止区間が必要なため。
–動作区間の両端に静止区間を用意• オフセット補正に静止区間が必要なため。
–最初の非静止区間は歩行状態に設定• 識別に歩行状態での平均値が必要なため。
2016/01/20 ( 水 )名田 太河
4/10

4. 角度の推定–角速度センサーの積分値より脚の角度を推定• ドリフト誤差に対するオフセット補正が必要となる。
2016/01/20 ( 水 )名田 太河
5/10図 2: 角速度及び角度に対するオフセット補正の適用結果
2016
0114
1327
37-0
-gyr
o.cs
v
角速度を台形積分
↓静止時に
0 に戻らない
角度に対してオフセット補正
↓静止時に0 に戻る

4. 角度の推定–移動平均によるオフセット補正• 階段上昇、下降の特徴が失われる。
–静止時と動作時で補正値を変更• 静止区間 : 移動平均による補正値を適用する。• 非静止区間 : 区間端の補正値から一次関数を求め
一次関数から求まる補正値を適用する。
2016/01/20 ( 水 )名田 太河
6/10図 3: 本研究で用いるオフセット補正の手法
time
offset

5. 歩行状態の推定–先行研究のアルゴリズムを利用• 歩行開始、終了時の状態は前後の推定を参照した。
2016/01/20 ( 水 )名田 太河
7/10図 4: ステップ検出の実行結果の一部
2015
1118
1421
00-0
-gyr
o.cs
v
端は脚の角度が小さい
⇩
後続の推定に支障↓
歩行状態の平均値に用いない
&
端の推定が不正確↓
前後の推定を利用
階段上昇階段下降
歩行

6. 評価–独自に計測したデータ• Xperia™ Z3 Compact 、 Galaxy™ S2 / S3 で計測し
た。• サンプリングレートはそれぞれ
約 200 Hz (Xperia) 、約 100Hz (Galaxy) となった。
–評価方法• 各状態が生じている時間を推定した時間と比較した。• 12 人で測定し時間に基づく推定割合を求めた。
2016/01/20 ( 水 )名田 太河
8/10
歩行 階段上昇 階段下降歩行 76.1% 13.7% 10.1%
階段上昇 1.6% 97.7% 0.7%階段下降 18.2% 4.7% 77.1%
推定割合状態
表 1: 独自に計測したデータに対する推定結果

6. 評価– HASC コーパス (2012, 2013, 2015, IPSC)• 装着位置が「 waist 」の角速度データを用いた。• 「 jog 」や「 skip 」のデータを除外した。• 「 walk 」のデータが先頭に来るようにした。
–評価方法• ラベルの区間における主状態をラベルと比較した。
2016/01/20 ( 水 )名田 太河
9/10
静止 歩行 階段上昇 階段下降静止 91.7% 4.5% 3.0% 0.8%歩行 7.1% 57.9% 27.4% 7.6%
階段上昇 25.9% 22.2% 45.7% 6.2%階段下降 27.7% 27.7% 7.2% 37.3%
( / )推定割合 推定時間 ラベル付けされた時間ラベル
表 2: HASC コーパスに対する推定結果

7. 結論–結果• 独自に計測したデータにおける推定では
各状態において 76.1% 以上の精度を示した。• HASC コーパスのデータにおける推定では
階段上昇は 45.7% 、階段上昇は 37.3% と独自に計測したデータより悪い精度を示した。
–課題• 曲がりながら歩行する場合に積分値が大きくずれる。• 積分値のずれにより強力なオフセット補正がかかる。• 最大→最小あるいは最小→最大の角度差が小さくなる。• ステップとして検出されなくなる。
2016/01/20 ( 水 )名田 太河
10/10