Embed Size (px)
Citation preview

EdgeTech Sub‐Bottom Profiler
Training

• Introduction to EdgeTech
• Sub‐bottom Profilers– Sub‐Bottom Profiler Principles– Sub‐Bottom Profiler Field Operations– EdgeTech Sub‐Bottom Profiler Systems– Data Interpretation– Maintenance and Troubleshooting
Agenda

• Industry leader in Underwater Acoustics• EdgeTech (formerly EG&G Marine Instruments)
– Started in 1966 by Doc Edgerton
• ORE Offshore– Formed in 1963
• Facilities in Massachusetts and Florida
Common Technologies
Underwater AcousticsDigital Signal Processing
Introduction to EdgeTech

• EG&G started by “Doc” Edgerton• Called “Papa Flash” by Jacques
Cousteau
• Work on underwater photography lead into sonar development
Images © Harold & Esther Edgerton Foundation
Introduction : Who we are

• Long history in the marine community
• Diverse offering based on underwater acoustics– Sonar Systems
• Side Scan Sonars, Bathymetric systems, and Sub‐Bottom Profilers– Acoustic Command Systems
• Acoustic Releases and Acoustic Actuators– Acoustic Positioning
• USBL Systems
• Standard Products and custom solutions provider
• Manufacturing quality and efficiency– Cell based lean manufacturing– Part traceability– Rigorous Testing
• Very strong Engineering team– Research and Development– Product Applications– Customer Support and Training
What sets EdgeTech apart ?

• Engineering– Acoustic
• Ceramics, transducers, hydrophones, arrays• Algorithms
– Mechanical• High level of experience with electronics, housing, array, packaging, cabling
– Software• Firmware and user‐level expertise
– Test
– Specials, custom solutions
– New product development emphasis
Core Competencies

• Manufacturing– Cell based lean manufacturing
– Strong supporting test facilities for engineering and manufacturing
• Pressure chambers, environmental, acoustic test tank, 2 research vessels for on‐water tests
• Support / Customer Service– Training and Commissioning Support.
– Phone and Remote Access Support
• 24 hour / 365 days
– Authorised Service Centres
Core Competencies

• Sonar Systems– Side Scan Sonar– Sub‐bottom Profilers– Bathymetry – Combined Systems– AUV/ROV Systems
• Actuated Products– Acoustic Releases– Pop‐up Systems– Acoustic Actuators
• Navigation & Positioning– USBL Acoustic Tracking Systems– Motion Reference Unit (MRU)
Products & Solutions

Sonar Systems4125
Ultra High ResolutionLightweight Portable
4200Multipurpose
Side Scan System
6205Bathymetry &Side Scan Sonar
LMCSMilitary ‐ High Speed &
Long Range
Side Scan Sonar Sub‐bottom ProfilerBathymetry (3‐D) Frequency options available
400 kHz & 900 kHz600 kHz & 1600 kHz
100 kHz & 400 kHz100 kHz & 600 kHz300 kHz & 600 kHz300 kHz & 900 kHz
230 kHz (230 & 550 kHz SSS)540 kHz (230 & 550 kHz SSS)540 kHz (550 & 1600 kHz SSS)
600/1600 kHz MP DF
Depth (meters) 200 m 2000 m 100 m 300 m or customBathymetry : Multi‐Pulse option : Dynamic Focusing : Configurations :Tow fish Ship or pole mount AUV/ ROV mount
Sample Applications: • Hydrographic Surveys• Geological Surveys• Search & Recovery• Channel/Clearance Surveys• Bridge/Pier/Harbor Wall
Inspection• Hull Inspections
• Hydrographic Surveys• Archeological Surveys• Cable and Pipeline Surveys• Geohazard Surveys• Geological/Geophysical Surveys
• Benthic Habitat Mapping• Dredging Operations• Military Rapid Environ.
Assessments (REA)• Nautical Charting• Route Surveys• Shallow Water Hydrographic
Surveys
• Mine‐like target detection andclassification
• Change detection• Q Route Survey• High speed/long range survey

3100/3200Portable Sub‐bottom
profiler
2000Combined Side scan sonar
& Sub‐bottom
2200 / 2205Sonars for ROV, AUV, USV
2400 / SpecialsDeep tows
Side Scan Sonar
Sub‐bottom Profiler
Bathymetry (3‐D) Frequencies options available
500 Hz‐12 kHz2‐16 kHz4‐24 kHz
500 Hz‐12 kHz2‐16 kHz
100 kHz/400 kHz300 kHz/600 kHz
all sub‐bottom, side scan and bathymetry frequencies available
1‐10 kHz2‐16 kHz
75 kHz/110 kHz120 kHz/410 kHz
230 or 540 kHz (bathy)Depth (meters) 300 m 2000 m, 3000 m options to 6000 m options to 6000 mBathymetry: optionalMulti‐Pulse : Dynamic Focusing : optionalConfigurations :
Tow fish Ship or pole mount AUV/ ROV mount
Sample Applications: • Geological Surveys• Geohazard Surveys• Buried Object Location• Mining/Dredging Surveys• Bridge/Shoreline Scour
Surveys• Pipeline and Cable Location
• Archeological Surveys• Geological/Geophysical Surveys• Sediment Classification• Cable and Pipeline Surveys• Pre/Post Dredging Surveys• Scour/Erosion Investigation• Marine Construction Surveys
• Geo‐hazard surveys• Geological/geophysical surveys • Buried pipeline and cable• Route Surveys• Archeological surveys• Military surveys
• Deep Water Searches• Geohazard Surveys• Geological/Geophysical Surveys• Cable and Pipeline Surveys• Route Surveys• Archeological Surveys
Sonar Systems

Example Customers
A far from complete listing:
• Military / Hydro– United Kingdom
MOD– France (SHOM)– India DSR/NHO– Canada– Sweden– Egypt
– Atlas– Thales– Kongsberg
• Commercial– C&C Technologies– EGS Asia– Fugro Survey– Gardline Surveys– GSE Rentals (UK)– NCS Subsea (USA)– Odyssey Marine– Subsea
Technology & Rentals (UK)
– Survey Equipment Services (USA)
– Watergate (Nigeria)
• Research– NOAA (USA)– Scripps Institute of
Oceanography (USA)
– CEFAS (UK) – KORDI (Korea)– Maritime Institute
(Poland)– Institute of
Marine Survey and Planning (China)
– Geological Survey of Ireland

Sub‐Bottom profiling systems identify and measure various sediment layers that exist below the sediment/water interface.
The sound from the transmitter travels down to the seafloor. Some of the sound reflects off the seafloor but some of the sound penetrates the seafloor. The sound that penetrates the seafloor may also reflect off layers of material within the seafloor. The reflected sounds travel back up to the surface.
The time it takes the sound to return to the ship can be used to find the thickness of the layers in the seafloor and their position. It also gives some information about the composition of the layers.
What is a Sub‐Bottom Profiler

• Map, measure and classify sediment layers within the sea floor– Locate and map possible hazards in the area
• Faults• Shallow Gas
– Locate and map bedrock
• Locate objects on or in the sea floor– Determine the depth of burial of an object
• Pipelines• Cables
• Map natural resources– Map dredging volumes for clearance– Map dredging volumes for extraction
Uses of Sub‐bottom Profilers

• Seismic Reflection
• Sound Source
• Penetration
• Hydrophones
• Time of Travel
What is a Sub‐Bottom Profiler

• Sonar Equations– Source Level– Transmission Losses : Spherical Spreading– Transmission Losses : Absorption in water– Transmission Losses : Attenuation in different Sediments– Reflection of Sound– Noise
• Pulse Length, Bandwidth and Resolution– Attenuation in different Sediments
Sub‐Bottom Profiler Principles

Basic Sonar Equations
EL = SL – 2 TL + TSWhere EL = Echo Level, or received signal
SL = Source Level, in dB referenced to 1 μPa at 1mTL = Transmission Loss, in dBTS = Target Strength, a ratio in dB of the sound returned to the incident
intensity form a distant source
SL = 171 + 10 log PT +DITWhere PT = Acoustic power in watts,
DIT = Directivity index of the transducer.
ReferencesPrinciples of Underwater Sound, R.J.Urick
Fundamentals of Acoustics, Kinsler et al.
Sonar Acoustics Handbook, NURC (a NATO Research centre)http://traktoria.org/files/sonar/references/NURC_sonar_acoustics_handbook_2008.pdf

Sonar Equations – Source Level
SL = 171 + 10 log PT +DITWhere PT = Acoustic power in watts,
DIT = Directivity index of the transducer.
DIT = 10 log DF or DIT = 10 log (I beam / I omni )Where DF = Directivity factor
For an idealised circular piston diameter d, DF
For a SB-216 transducer, diameter ≈ 160mm, centre frequency ≈ 9 kHz, we get DI ≈ 5 dB,
which means for a 3100 with a 200 W amplifier, SL ≈ 200 dB,
and for a 3200 with a 2000 W amplifier, SL ≈ 210 dB.

• Absorption losses are dependent on frequency, but are not significant at Sub‐Bottom profiler frequencies.
• Spherical Spreading losses are geometrical and independent of frequency and are the dominant in‐water transmission loss mechanism for Sub‐bottom Profilers.
• Attenuation in the sub‐bottom sediments are frequency and sediment type dependent, and overall are the dominant transmission loss mechanism for Sub‐bottom Profilers.
Transmission Losses

• Spreading loss
– Spherical Spreading Transmission loss is given by 20 log r
• When it hits the sea bottom or surface, spreading becomes cylindrical
– Cylindrical Spreading Transmission loss is given by 10 log r
Spherical Spreading Losses

• Attenuation in the sub‐bottom sediments are frequency and sediment type dependent, and overall are the dominant transmission loss mechanism for Sub‐bottom Profilers.
• Plot of NormalisedSignal shows the way different sediment types affect different frequency signals
Transmission Losses

• Deflection of the path of a sound wave by an object or by the boundary between two media
• Acoustic properties of the boundaries…– Similar = less reflection– Dissimilar = more reflection
• Acoustic Impedance Z = Vρ– V is seismic wave velocity in the
material– ρ is the density of the material
Reflection of Sound

Noise : Ambient Noise
• Ambient Noise sources– Traveling through the sea, an
underwater sound signal becomes delayed, distorted and weakened, reflecting on boundaries of underside surface of waves, bottom and shores, bubbles, suspended particles and marine life.
– Tide, current, temperature variances and wind also play on a sound's final quality.
– Man made noise can also affect the results
• Vessel Noise– Sub‐Bottom profilers are largely in
the audio spectrum
– There is lot’s of vessel generated noise here

• Type of bottom material• Center frequency of the chirp pulse• Presence of biological material• Signal scattering• Beam width• Transmitted Power
Depth of Penetration

• Pingers / Pipeliners• ORE, GeoAcoustics, SES etc.• 3.5 kHz, 5 kHz, 7 kHz ….
• Boomers• EG&G 240, Huntec, AAE• 300 Hz – 6 kHz
• Sparkers• AAE, GeoResources, SIG• Frequency is tip and depth dependent
• Mini‐Airgun• Sercel Sodera• 300 Hz – 2.5 kHz
Traditional Systems

Penetration versus Resolution
The classic dilemma:
Low Frequency Sources provide Penetration
• For an oscillating bubble, frequency decreases with increased energy.
– The larger the airgun, the lower the frequency
• For transducers, the lower the frequency, the larger they need to be
– Very low frequency, high power transducers are difficult to build.
High Frequency Sources provide Resolution
• High Frequency transducers can be smaller and lighter
– Making the towfish easier to deploy
• But there is limited penetration
– Especially in coarse sediments

“The total energy output of magnetostrictive sources is extended by generating frequency modulated pulses that sweep a range of frequencies”
E.J.W. JonesMarine Geophysics
Energy from transducers

• A Full Spectrum Sub‐Bottom Profiler outputs an FM pulse that is linearly swept over a full spectrum frequency range.
(e.g: 2 ‐ 16 kHz over 20 ms)
Full Spectrum Systems
The FM pulse is also called a CHIRP pulse, and although CHIRP stands for Compressed High Intensity Radar Pulse, the name has stuck because of the sound these sub‐bottom profilers make.

CHIRP Pulses
• CHIRP (or Broadband, or Spread Spectrum) Pulses– Provide high energy signals, with superior resolution – Implementation of matched filter processing
• After match filtering the returns are shorter in time
• As before, but with added white noise
http://en.wikipedia.org/wiki/Pulse_compression

• EdgeTech “Full Spectrum” pulse characteristics– Bandwidth
• The wider the bandwidth, the better the resolution
– Length• Longer pulses provide more acoustic energy
– Waveform• Sweep has a linear variation of frequency with time.• For “FM” shaped pulses the Full Spectrum wavelet is weighted
in the frequency domain to have a Gaussian like shape (Blackman‐Harris window) which provides a great rejection of the side lobes.
• Wideband (WB) pulses have a flat response over the entire pulse bandwidth, so more low frequency content.
Pulse Options

• EdgeTech “Full Spectrum” pulse characteristics
– Bandwidth• The wider the bandwidth, the better the
resolution
– Length• Longer pulses provide more acoustic energy
– Waveform• For “FM” shaped pulses the Full Spectrum
wavelet is weighted in the frequency domain to have a Gaussian like shape (Blackman‐Harris window) which provides a great rejection of the side lobes.
• Wideband (WB) pulses have a flat response over the entire pulse bandwidth, so more low frequency content.
• Sweep has a linear variation of frequency with time.
Selection of Best Pulse
Pulse selectionThe selection of the pulse is made on‐line by the operator while profiling to achieve the best imagery and taking into consideration • The minimum required penetration depth • Seafloor sediment type

• EdgeTech “Full Spectrum” pulse characteristics– Bandwidth
• The wider the bandwidth, the better the resolution
– Length• Longer pulses provide more acoustic energy
– Waveform• For “FM” shaped pulses the Full Spectrum wavelet is weighted in the frequency domain to have a Gaussian like
shape (Blackman‐Harris window) which provides a great rejection of the side lobes.• Wideband (WB) pulses have a flat response over the entire pulse bandwidth, so more low frequency content.• Sweep has a linear variation of frequency with time.
• Quadratic Pulses– Waveform
• Sweep rate varies with time, with greater proportion of pulse length spent at lower part of the frequency range.• Designed to help improve penetration.
• Dual Frequency Mode– Alternates between two transmission pulses– Two data streams
• Each utilising a different pulse.
Pulse Options

• Sub‐Bottom Profiler Operations
– Towfish Altitude– Deployment methods– Pipeline Detection– Heave Compensation
Agenda : SBP Field Operations

• It's not necessary to tow the vehicle near the seafloor in order to get good results, it is possible to get results with hundreds of meters of water column.
– In many cases our customers ‘shallow tow’ the sub‐bottom profiler towfish relatively near the surface, at a typical tow depth of 5 to 10m. This approach is fine for regional geological analysis, where the area insonified on the seabed is not that critical.
– In general, when towing the system near the surface, we advise that a 216 towfish based system can operate effectively in water depths up to around 500m, and a 512 towfish based system in water depths up to around 1500m.
• Towing a sub‐bottom profiler system close to the seabed is generally only required where very location specific ‘engineering’ data is required.
– Towing the close to the bottom reduces the area of the seafloor insonified, reducing the scattering, and also producing a more focused beam which will improve spatial resolution. For the best results, the optimal height off the seafloor would be about 5‐10 meters.
– The maximum amount of cable that the 3200 topside and SB‐512i towfish can run on is 500 meters which will limit how close to the seafloor you can get, so in theory you could get the tow fish to a depth of around 150 meters with 500 meters of double armored cable.
– A 2000‐CSS or 2000‐DSS combined side scan and sub‐bottom profiler can run on coax armoured cable, and can be deployed near the seabed in up to 300m of water for the 2000‐CSS and 2000m of water for the 2000‐DSS.
Towfish Altitude

Horizontal Resolution

Towfish Rigging / Deployment

Alternative Deployment
3100P - Pole Mount option
Alternative deployment for
the 424 and 216 Towfish
Custom Engineered Solutions
Raft or Bouysolutions for towing the
heavier 512 towfish behind smaller vessels

Deployment
DON’TAre your feet
wet?

• Conventional Configuration– Two hydrophone arrays mounted in
the along track direction– These give a narrow along track
beamwidth, and a wider across track beamwidth
– This is good for general geological survey operations
• Pipeline detection configuration– A single transverse hydrophone
array– Gives a wide along track beamwidth– Which accentuates the parabola off
the pipeline
Pipeline Detection

• Methods– Swell filter– Sensor input
• Cleaner image– Better representation
of bottom and sub‐bottom
– Easier to interpret
Heave Compensation

• EdgeTech Sub‐Bottom Profiler Systems– Towed Systems
• 3100• 3200
– Hull Mount Systems• 3300
– AUV / ROV Systems
Agenda : EdgeTech SBP Systems

Towed Systems
3100-P
Portable system for smaller boats with a choice of
two different towfish:
216 2 – 16 kHz424 4 – 24 kHz
3200-XS
Rack mount system with a choice of three
different towfish:
512 500 Hz – 12 KHz216 2 – 16 kHz424 4 – 24 kHz

Towfish
SB‐0512i SB‐216S SB‐424
Frequency Range 500 Hz – 12 kHz 2 – 16 kHz 4 – 24 kHz
Pulse Type Frequency Modulated
Vertical Resolution (depends on Pulse selected)
8 – 20 cm 6 – 10 cm 4 – 8 cm
Penetration (typical)In coarse calcareous sandIn clay
20 m200 m
6 m80 m
2 m 40 m
Beam Width(depends on centre frequency)
16° ‐ 32° 17° ‐ 24° 16° ‐ 23°
Size (cms) 160 x 124 x 47 105 x 67 x 40 77 x 50 x 34
Weight 190 kg 76 kg 45 kg
Cable requirements 3 shielded twisted pairs (5 conductors used)
Maximum Operating Depth 300 m
Tow Speed 3 – 4 knots optimal, 7 knots max. safe operation

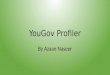
SB‐512 Data Examples
Sand hill over top of marine high‐stand/on‐lapping sands, which are over top of limestone, which represents seismic bottom for this image.
This is 8 – 10 meters of penetration in relatively coarse sand, untilyou hit the limestone.

SB‐512 Data Examples

3300 Hull mount Systems
DW‐216 DW‐106
Frequency Range 2 – 16 kHz 1 – 8 kHz
Pulse Type Full Spectrum chirp frequency modulated pulse with amplitude and phase weighting
Vertical Resolution (depends on Pulse selected) 6 – 10 cm 15 – 25 cm
Penetration (typical)In coarse calcareous sandIn clay
6 m80 m
15 m 150 m
Hull Mount Array Configurationoptions
4 element (2 x 2)9 element (3 x 3)16 element (4 x 4)25 element (5 x 5)
3 element5 element7 element

3300 System Enhancements
Transducer Selection
Receive Mode(Automatic)*
Mode A Mode B *Transmit and Receive on
the same transducersTransmit and Receive on
different transducers
Transmit Bus Tx & Rx Tx
Off Off Off
Receive Bus Off Rx *
*Switching any transducer into receive only mode, automatically enables Mode B
Switchable array configuration
• Allows the operator to change the array beampattern, e.g. for pipeline crossing.
• The system can be set to transmit and receive on different transducers, which allows longer pulses to be used in shallow water operations

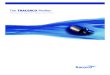
3300 : Data Example
EdgeTech 3300HM
4x4 Array of KT-216 transducers
Chirp operating at 1.5 - 9.0 kHz
Water depth = 200 - 300 m (approximately)
Time lines represent 16 m vertical depth (based on 1600m/s below seabed)
Navigation fixes are 50m per division

• Range of Transducer Options
AUV / ROV Mounted Systems
DW‐424 DW‐216 DW‐106
Frequency Range 4 – 24 kHz 2 – 16 kHz 1 – 10 kHz
Pulse Type Full Spectrum chirp frequency modulated pulse with amplitude and phase weighting
Vertical Resolution (depends on Pulse selected)
4 – 8 cm 6 – 10 cm 15 – 25 cm
Penetration (typical)In coarse calcareous sandIn clay
2 m40 m
6 m80 m
15 m 150 m
Beam Width(depends on centre frequency)
15° ‐ 25° 15° ‐ 25° 28° ‐ 36°

• Transmit and Receive on the Transducer– Reduced Hardware
• Adds a T/R (Transmit/Receive) switch, but removes the need for separate receive hydrophones.
– Limits Pulse Length• Limits the pulse length that can be used when close to the seabed – need to stop transmit pulse, and eliminate
ringing, before 1st receive.• Not recommended for AUV’s.
• Separate PZT receive Hydrophone arrays– Pulse length independent of altitude
• Can receive on hydrophones whilst still transmitting.
– Linear arrays in parallel used to define receive beam pattern
• Separate PVDF receive Hydrophone panels– Pulse length independent of altitude
• Can receive on hydrophones whilst still transmitting.
– Standard panel sizes or Custom built • Custom sizes can be designed to fit vehicle• Multiple receive options for different applications.
AUV / ROV Receive Options

Sub‐bottom Profiler on AUV’s
AUV Sub-Bottom data
DW-106 TransmitQuadratic pulse
PVDF receive arrays

• EdgeTech Full Spectrum Sub‐Bottom Profilers offer:
• Selectable FM Pulses• Matched Filter Correlation• Up to 4 cm Vertical Resolution• 20‐30 dB Improved SNR Over Conventional systems• Wide Band Projectors • No Spatial Side Lobes• Reduced Sea Surface Effects
• EdgeTech offers sub‐bottom profiling systems for a variety of platforms:
• Towed• Hull Mount• Hosted Platform (AUV, ROV etc)• Custom, etc…
• EdgeTech systems offer various file format options
• EdgeTech native .JSF • SEG‐Y • .XTF
Summary of EdgeTech SBP’s

• Maintenance and Troubleshooting
– Standard Maintenance– System IP Configuration– Sonar.exe diagnostics– Software Maintenance– System Hardware
• 3100• 3200
Agenda : Troubleshooting

Standard Maintenance
• Sub‐Bottom Profilers are low maintenance• DO – wash them with fresh water before storing
• Look after Connectors• DO ‐ keep connectors clean
• DO ‐ use a small amount of connector grease
• DO ‐ fit a blanking plug to unused connectors
• DON’T – deploy a towfish without blanking plugs ‐ They are not depth rated when left open faced !
• Keep Transducers Clean• DON’T ‐ get connector grease on the transducer
• DO – clean them with water with some washing up liquid in it ‐ breaks surface tension

3100 System IP Configuration
3100 IP Addresses
Laptop / PC
Wired LAN 192.9.0.99
Wireless LAN 192.9.0.100
Topside Processor
Wireless Bridge 192.9.0.225
CPU 192.9.0.31

3100 Diagnostics ‐ Connecting
• Use Desktop Link• If you have to create a
remote desktop link– 192.9.0.31– Username : Administrator– Password : admin

Diagnostics – Sonar.exe
• ‘Sonar’ should appear in the display.
• Shows Self Test result• It shows any errors and
Alerts– In this case Alert 22 NET
TIME, as there was no GPS connected to the topside to sync the system to.

Diagnostics – Sonar.exe
• Go to File > Show Status
• Select ‘POST’ button
• It provides voltage levels etc.
– CPU voltages– 48v Amp power
• OK button to close

Discover SB ‐ Configuration files
• You can Save and Load Configuration files
– It’s a good policy to save configurations you know work !
• Discover will automatically save it’s configuration when you shut it down

3100P Topside Block Diagram

3200 Hardware : Rear panel

3200 : Legacy AB amplifier
• The output from the amplifier can be checked with an oscilloscope.
• The CHIRP signal should be around 170V peak to peak.

3200 : New Class D amplifier
• Class D “push pull” amplifier• Operated in a bridged mode
• Output levels are preset via an ethernet interface
• The front panel controls are disabled

• Data Interpretation
– File Formats– Sub‐bottom data interpretation– Discover Sub‐bottom software
• Display options • Gain Settings• Recording Options
Agenda : Data Interpretation

File Formats – .jsf files
• By default the sub‐bottom data in a .jsf file is stored as complex samples, X + jY, two numbers per sample.
• This is the Analytic signal data format (http://en.wikipedia.org/wiki/Analytic_signal )
• These complex data samples are of the format x and y, where
y= A sin(phi) x= A cos(phi)
and are represented as a number x + j*y. Where j =sqrt(‐1)
• So from this you will see that sqrt (x^2+y^2) = A the amplitude (the magnitude of the complex number), and the phase is phi = arctan (y/x).
In computing use phi = atan4(y,x) as this will return a value between 0 and 2π.
• However, please note that the data displayed on the Discover Sub‐bottom software screen just shows the amplitude A, and the phase is discarded. This is typical for sub‐bottom profiler data where the display is the envelope of the amplitude. Similarly, the SEG‐Y files created by Discover just record the amplitude (to comply with the format standard), and again the phase is discarded.

File Formats – SEG‐Y files
• EdgeTech strictly adheres to the Rev.1 (2002) formalization of the standard, which can be found at: http://www.seg.org/resources/publications/misc/technical‐standards
• The SEG‐Y standard allows a great deal of flexibility about the way that both the headers, and the data words, can be written
• The first issue is that systems will often only read a sub‐set of the full range of formats allowed under the SEG‐Y standard. The most common of these, are ones that will only read ASCII characters and IEEE floating point numbers, or EBCDIC characters and IBM floating point numbers.
• The key here is to choose the SEG‐Y file creation options that match what the reader will accept. Knowing what your SEG‐Y reader will accept is important.
• Some readers will read a subset of standard SEG‐Y with restrictions based on the first systems they supported, and lack of support for trace size changes fits into this category. According to the standard, the size field in the trace header supersedes the value in the binary header, but some systems still use the File header value for the whole file.
• To alleviate this problem we have added the option in DISCOVER to start a new file on size changes. This works well as long as the system is not using multi‐ping logic, which constantly adjusts the window sizes. In those cases, the result is too many SEG‐Y files.

• Transmit (T0)
• Bottom Echo
• Layers
• Multiples
SBP Data Interpretation

Interpretation ‐Multiples
Bottom = Water Depth (WD) – Fish Depth (FD)
1st Multiple = 2x Water Depth (2WD) – Fish Depth (FD)
2nd Multiple = 3x Water Depth (3WD) – Fish Depth (FD)

Interpretation ‐Multiples
Bottom = Water Depth (WD) – Fish Depth (FD)
1st Multiple = 2x Water Depth (2WD) – Fish Depth (FD)
2nd Multiple = 3x Water Depth (3WD) – Fish Depth (FD)

• Vertical Resolution
• Attenuation in the Sediments
• Acoustic Impedances of layers
Interpretation ‐ Layers

Geological Survey
Analysis of the Four Brothers Slump,
Lake ChamplainGhosh, Supriti J., 2012.
Unpublished Senior Thesis, Middlebury College, Middlebury,
VT

Shallow Gas detection
Shallow Gas “masks”
Acoustic data

Point source reflections

Pipeline and cable detection

• Pull Down Menus for Command and Control
• Toolbars for frequently used commands.
• Main Sonar Data Display
• Control Panel ‐tabbing dialog boxes for modifying parameters.
• Status bar for sonar control and sonar data status.
Discover SB Screen Layout

• Pull Down Menus for Command and Control
• Toolbars for frequently used commands.
• Main Sonar Data Display
• Control Panel ‐tabbing dialog boxes for modifying parameters.
• Status bar for sonar control and sonar data status.
Discover Sub‐Bottom Screen Layout

• Click and drag left button in scale bar to zoom in on a region.
• Double Click left mouse button in scale bar to zoom out on the display so that all data is displayed.
• Click and release the left mouse button in the ‘scope window to set the current bottom track position and threshold
• Click and drag the left button to set the bottom track window. If only a very small drag is performed then the track range is set to zero and the tracker is disabled.
• Move the mouse pointer to a ping and status information will be displayed in the main status bar.
• Left click in data to save target info into CSV file
• Right click on a layer to digitize
Discover Sub‐Bottom Screen Clicks

• Sonar Control• Display• Status Bar• Network• Navigation• Printer• Alerts• Logs• Miscellaneous• Record• Playback• Image Capture
Discover SB Control Panel

Discover SB Sonar Control

Discover SB Recording
• File Formats– JSF– XTF– SEG‐Y
• SEG‐Y Options– Data format– Header format– New file on size change
• XTF Options

Discover SB Interfaces
• Default settings for a 3100
• Lat / Long– GGL or GGA– VTG– ZDA
• X / Y Coordinates– GXY– GGU
• Event Marks– EVT

Discover SB Display
• Gain Control– Alternative to Toolbar
• Bottom Tracker– Alternative to Screen
clicks
• Heave compensation– Swell filter or Heave
Sensor

Discover SB ASCII and jpg Files
• NAV track file
• Bottom / Layer Digitisation file
• Jpeg image capture

Thank You!