Embed Size (px)
Citation preview

Handheld Mobile Laser Scanning in CavesAn introduction to ZEB1
The problem
How to scan a cave network?
> Tripod-based scanner
> Slow
> Cumbersome – lots of equipment to move around
> High capital cost
> Fragile
> Large datasets take considerable time to process
> Vehicle-mounted scanner
> Prohibitive capital cost
> Impossible to access small tunnels
> No GPS to give position
> Long processing time
Many of the issues with cave mapping are also experienced when scanning building internals (apart from the mud).
Solution – ZEB1 and GeoSLAM
Originally designed by CSIRO for scanning cave systems, but suitable for any area where there is no GPS – caves, tunnels, buildings, forests
Simple hardware:> Small 2D, 30m range laser – motion gives third dimension> Solid state inertial measurement unit> Very compact> Highly portable (no tripod)> No need to be stationary or level (not the normal survey practice)> Low cost> Rugged> Easy to operate> Rapid capture – scans as fast as you can walk through the area> Can be mounted to remote vehicles for unsafe areas
Once capture is complete, the raw data (points, trajectory and timing info) is uploaded to the secure GeoSLAM server for automatic processing – normally taking an equal time to process as to capture.
How ZEB1 works - GeoSLAM
During capture, the trajectory of the laser head is recorded
Each wobble of the head produces a 3D sweep of points
The unique GeoSLAM algorithm puts everything together to produce a complete 3D point cloud.
What is GeoSLAM?
• GeoSLAM is an algorithm using 3D SLAM technology from the robotics industry
• SLAM = Simultaneous Localisation and Mapping
• GeoSLAM uses the raw trajectory to roughly calculate the surface normals and potential constraints within a single sweep of the scanner
• Each sweep is matched to the next using the combined trajectory and constraints
• It is an iterative process which relies on geometric objects and features within the scans
Final outputs are in laz, las, ply, pts, and ptg
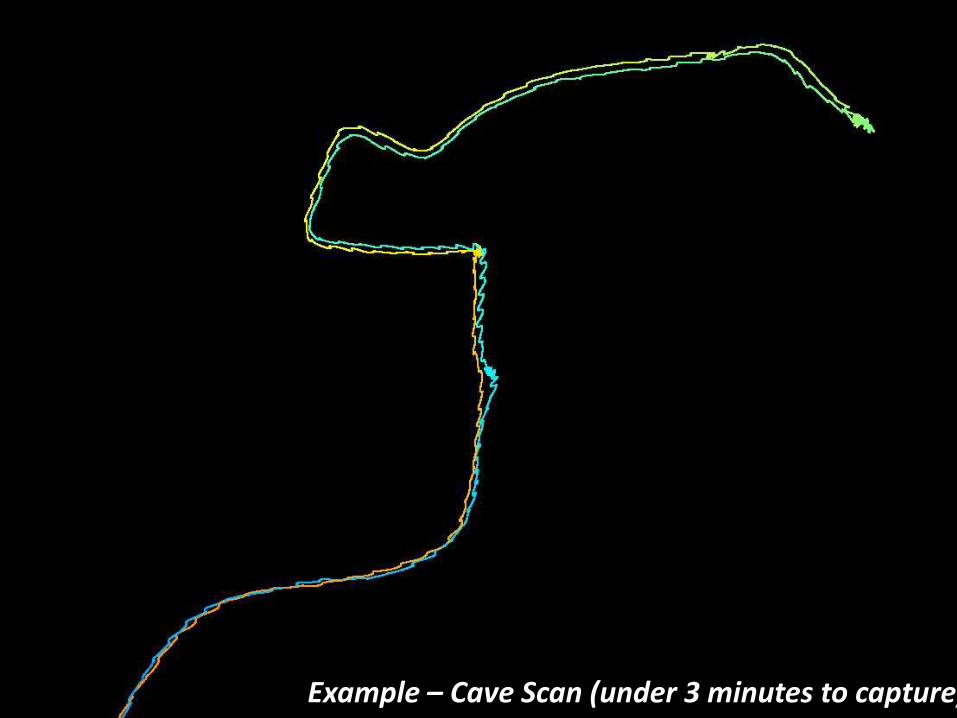
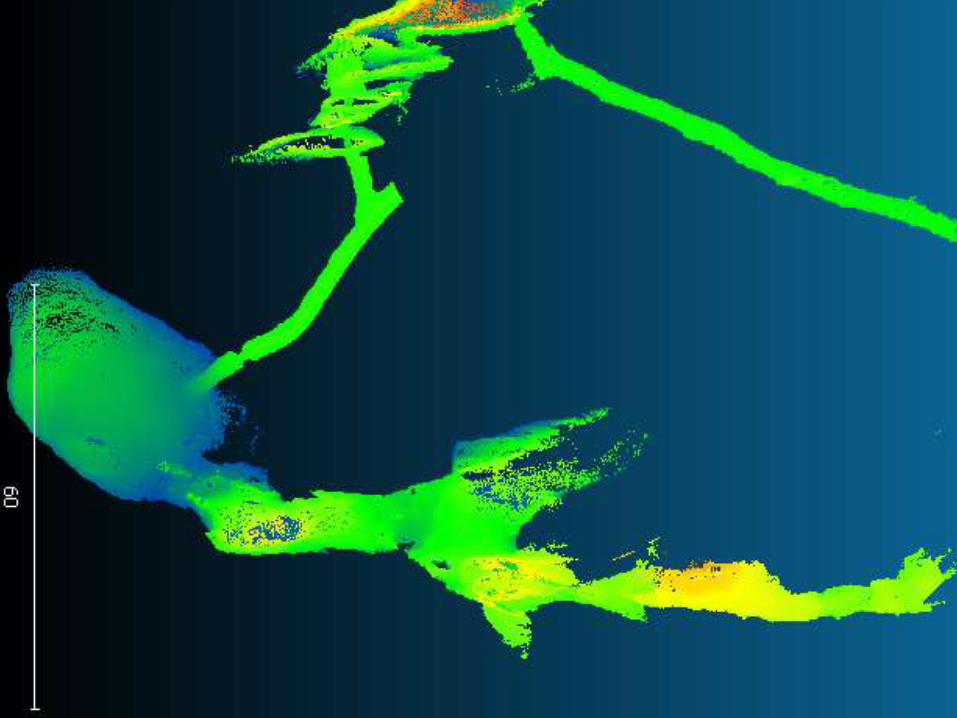
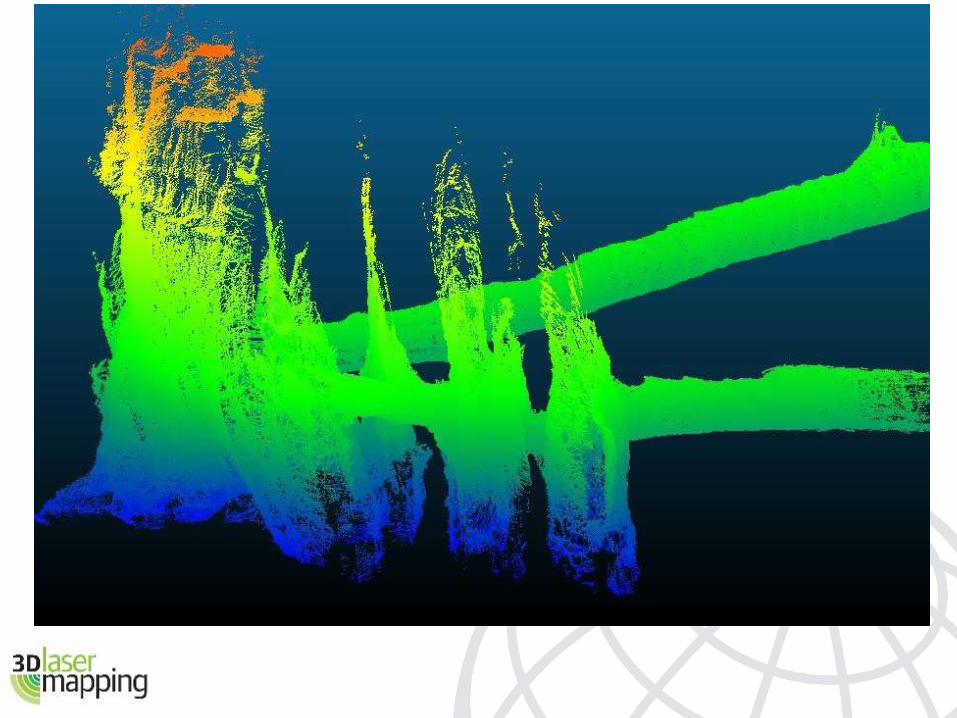
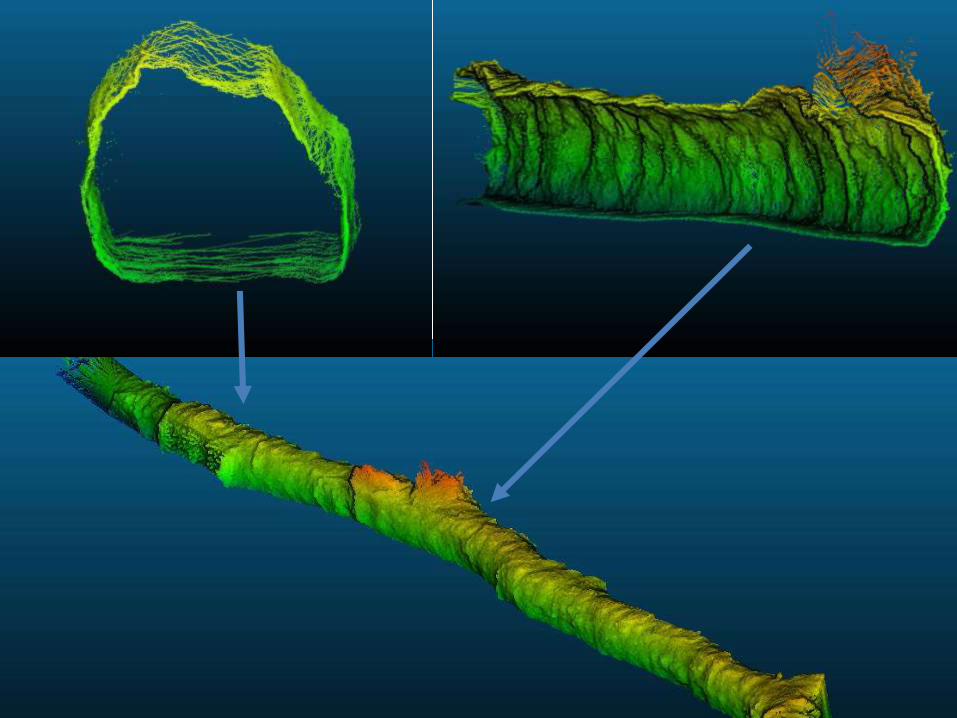
Example – Cave Scan (under 3 minutes to capture)
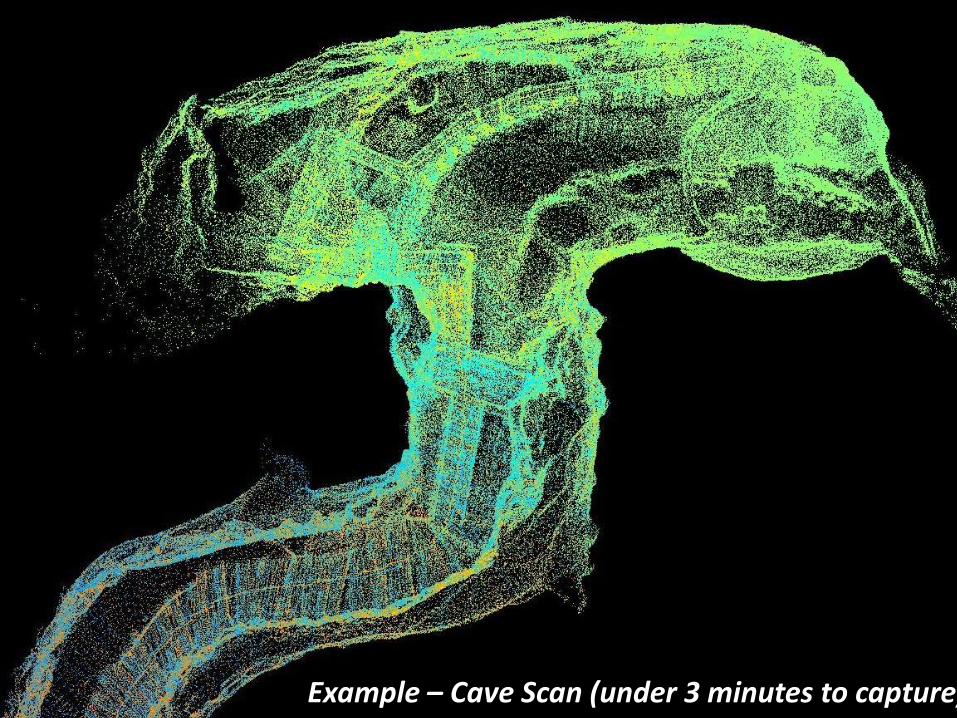
Example – Cave Scan (under 3 minutes to capture)
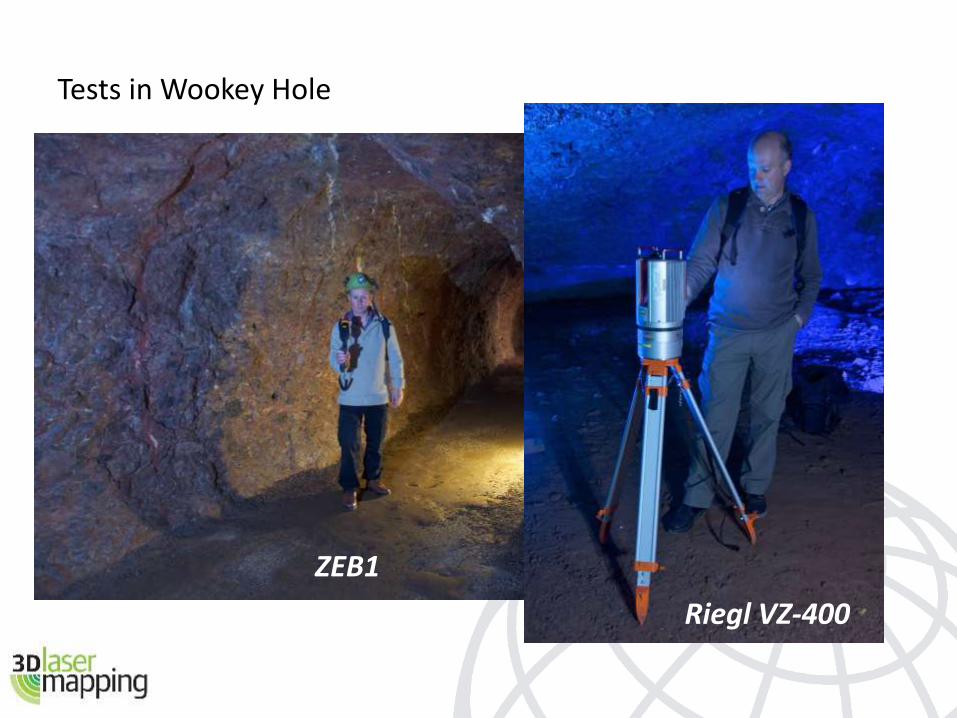
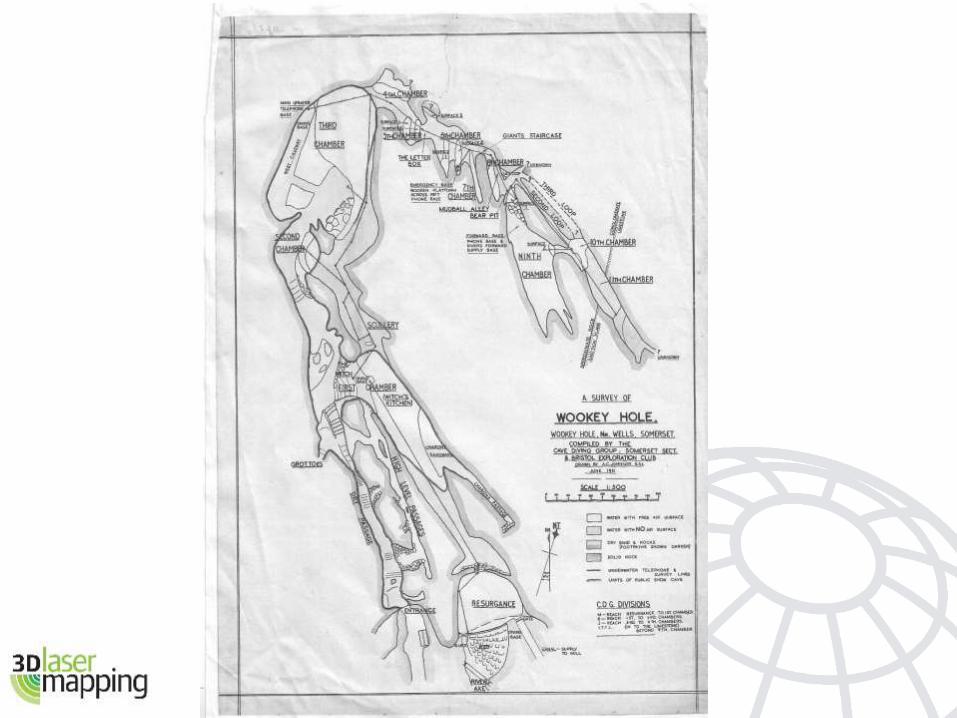
Tests in Wookey Hole
Riegl VZ-400
ZEB1
Wookey Hole Cave, UK
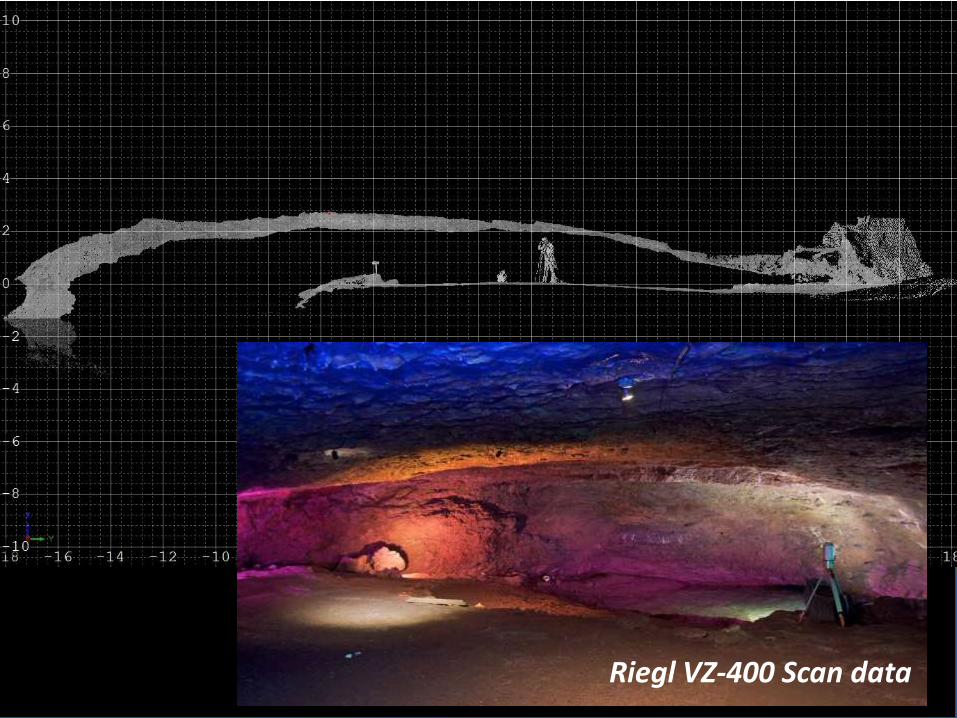
Riegl VZ-400 Scan data
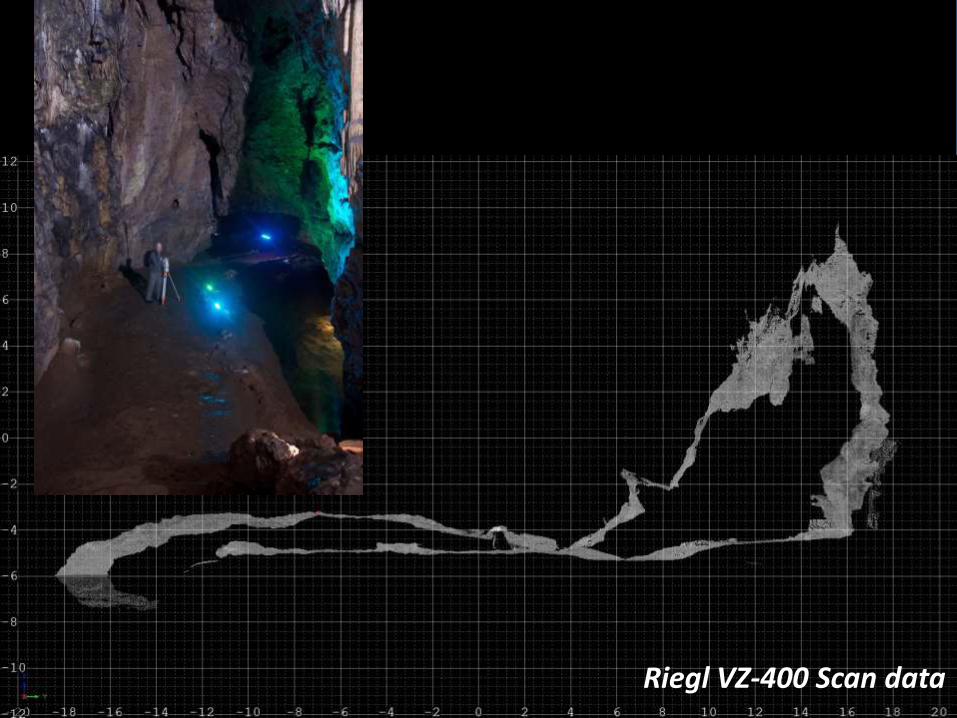
Riegl VZ-400 Scan data
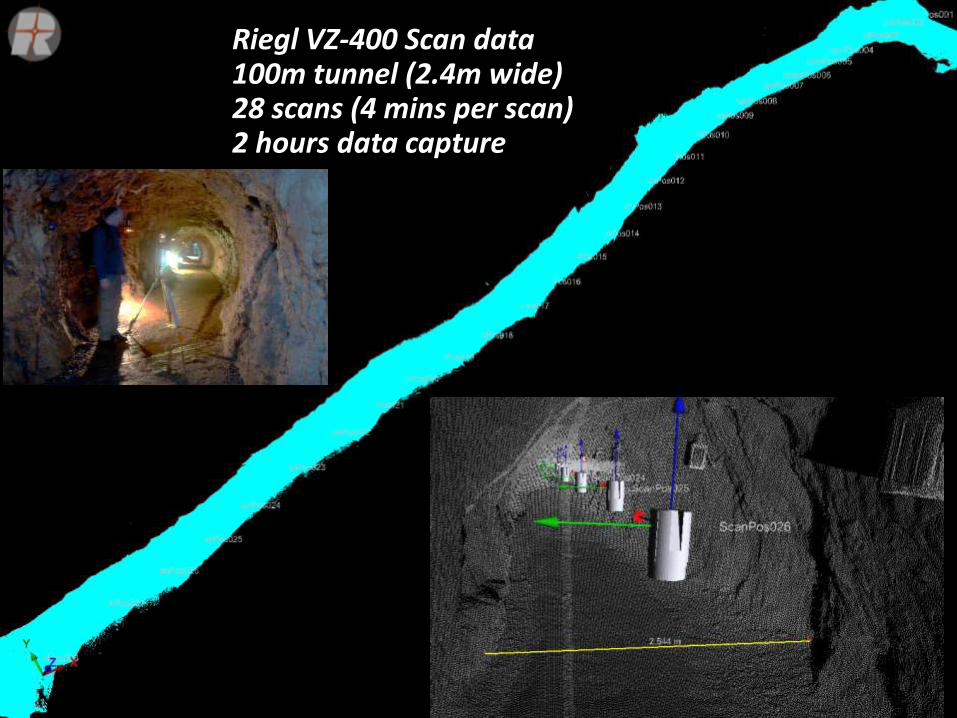
Riegl VZ-400 Scan data100m tunnel (2.4m wide)28 scans (4 mins per scan)2 hours data capture
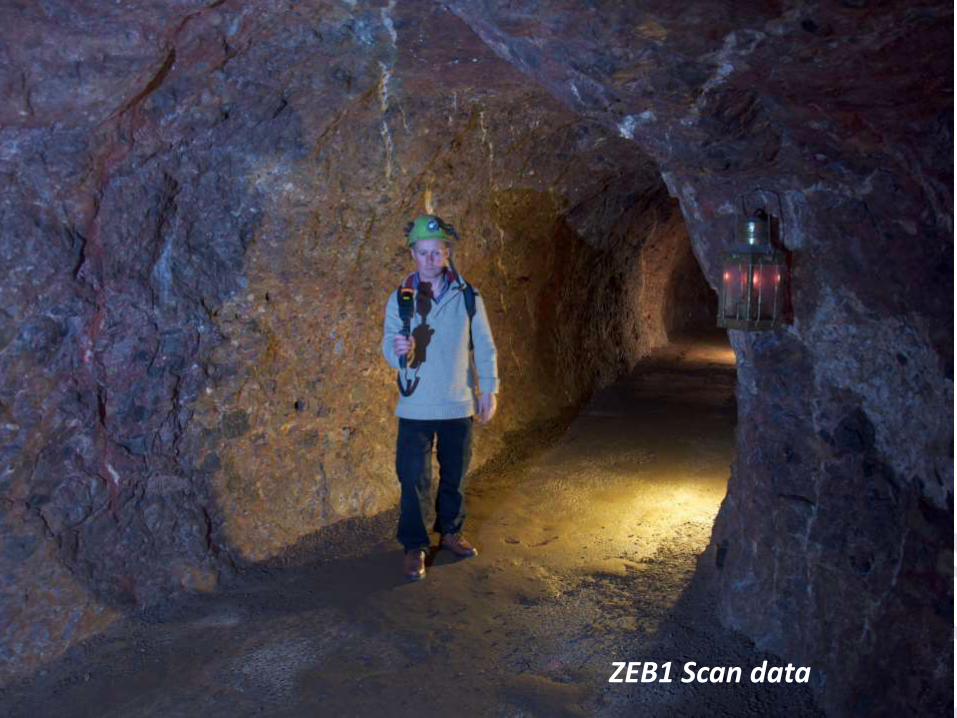
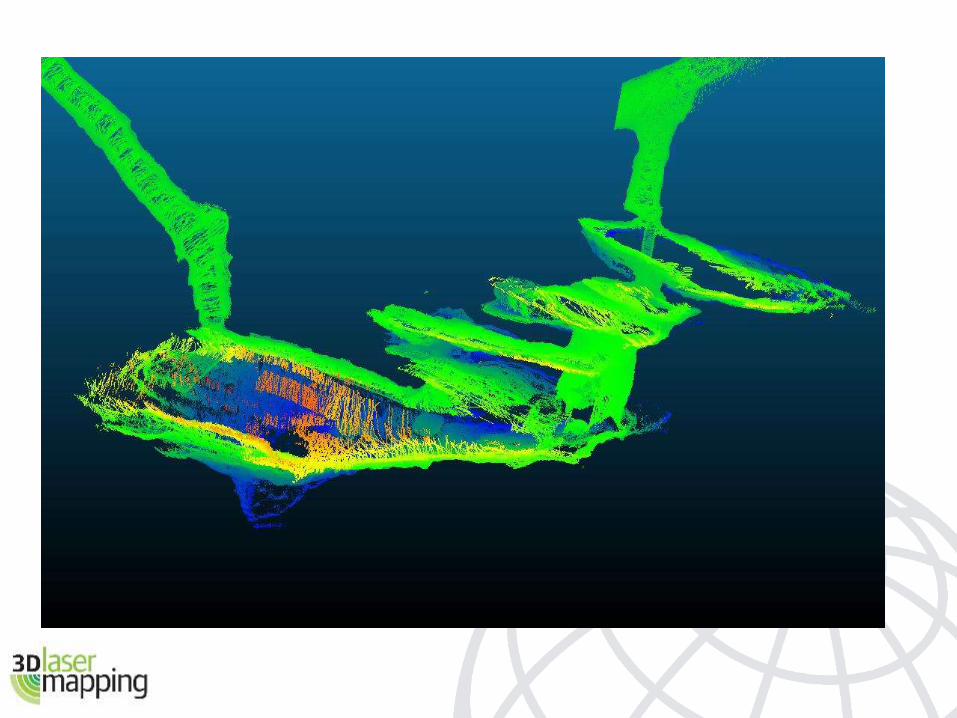
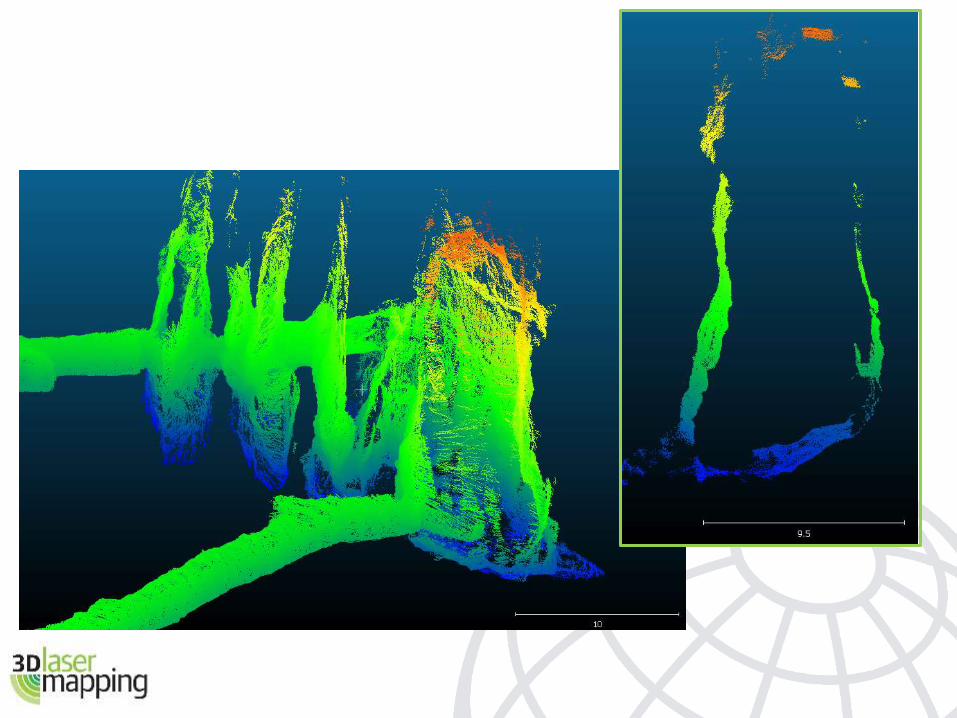
ZEB1 Scan data
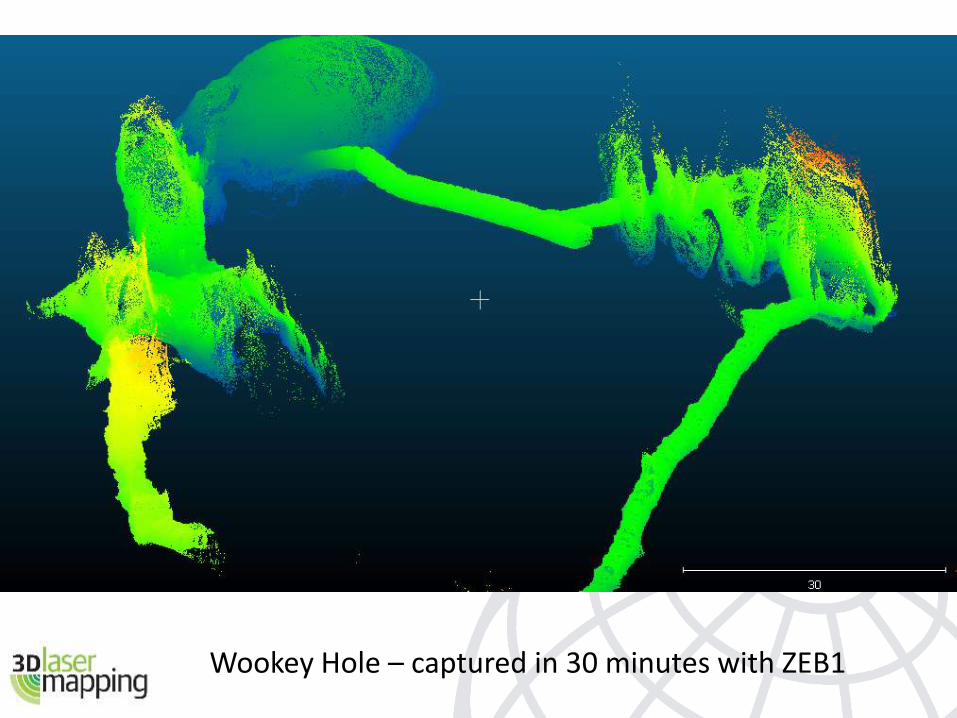
Wookey Hole – captured in 30 minutes with ZEB1