Embed Size (px)
Citation preview

O. Gervasi et al. (Eds.): ICCSA 2009, Part I, LNCS 5592, pp. 313–327, 2009. © Springer-Verlag Berlin Heidelberg 2009
A Cellular Automata-Ready GIS Infrastructure for Geosimulation and Territorial Analysis
Ivan Blecic1, Andrea Borruso2 , Arnaldo Cecchini1, Antonio D'Argenio2, Fabio Montagnino2, and Giuseppe A. Trunfio1
1 Department of Architecture and Planning - University of Sassari, Palazzo Pou Salit, Piazza Duomo 6, 07041 Alghero, Italy
{ivan,cecchini,trunfio}@uniss.it http://www.lampnet.org
2 TICONZERO Consortium, via Giovanni di Giovanni 14, 90139 Palermo, Italy {dargenio,borruso}@spaziogis.it, [email protected]
http://www.ticonzero.net
Abstract. This paper presents an integrated GIS and cellular automata (CA) modelling and simulation environment. We hold that several concurrent facts offer the necessary critical mass to foster the development of robust and scal-able general-purpose CA-modelling tools that go beyond demonstrative proof-of-concept status, allowing thus fully operational modelling and simulation of real-world territorial systems. Among these facts, we can mention the entering of the CA-based geosimulation modelling in its age of maturity, the growing computational capabilities of nowadays computers, the consolidation of gen-eral-purpose as well as specialised GIS-based geo-analysis methodologies and their availability as open-source libraries and applications. The environment hereby described is an example of a way to obtain such robust and general-purpose CA-modelling tool-box. Its main characteristics are (1) tight interop-erability between GIS and CAs, (2) a sufficiently generalised and flexible underlying CA meta-model allowing for the implementation of a variety of types of CA models, (3) computationally efficiency and (4) user-friendliness. We furthermore present two test case applications to illustrate a standard opera-tional modelling workflow within this simulation environment and to briefly il-lustrate its look-and-feel.
Keywords: Cellular automata, GIS, geosimulation, open source.
1 Introduction
The hereby presented geo-analysis, modelling and simulation infrastructure called REG-ISTA (Reality Emulating Geographical Information System for Territorial Analysis) is a milestone in our ongoing effort to develop effective generalised cellular automata (CA) modelling environment for geographical analysis and territorial planning, and to make it interoperable with Geographic Information System (GIS) infrastructures. The entering of the CA-based geosimulation modelling in its age of maturity [1,2,3,4,5], the growing computational capabilities of nowadays computers, the consolidation of general-purpose
314 I. Blecic et al.
as well as specialised GIS-based geo-analysis tools and their availability as open-source libraries and applications, in our view offer the necessary critical mass to foster the development of robust and scalable general-purpose CA-modelling tools. Tools that go beyond toy-like, demonstration, proof-of-concept status, allowing fully operational modelling and simulation of real-world territorial systems.
Specifically, such tools should encompass a series of requirements. In particular, they should (1) allow a tight interoperability with GIS where the spatial datasets are stored and are pre- or post-processed and analysed; (2) be grounded on a sufficiently generalised and flexible base CA meta-model, allowing the implementation of a vari-ety of types of CA models; (3) be computationally efficient; and (4) user-friendly.
REGISTA is an attempt to develop one such environment, integrating a GIS and a CA modelling and simulation module.
Section 2 of this paper outlines the overall architecture of REGISTA, describing its GIS capabilities and the formal specification of the underlying CA meta-model. Section 3 presents the implementations of the two well-know CA models in REG-ISTA, in an attempt to show its effectiveness for CA modelling, as well as for per-forming the necessary pre- and post-processing of the data. Finally, in section 4. we provide some conclusive notes.
2 Overview of REGISTA
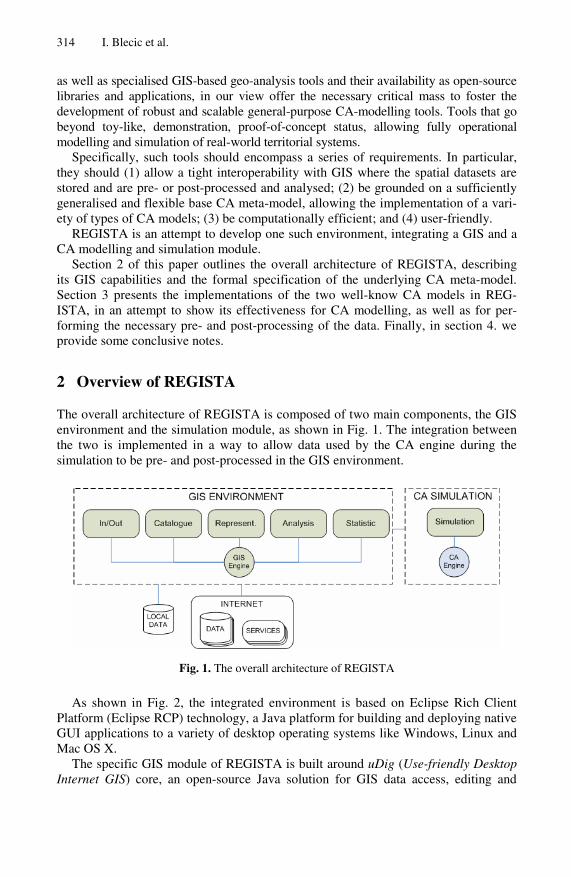
The overall architecture of REGISTA is composed of two main components, the GIS environment and the simulation module, as shown in Fig. 1. The integration between the two is implemented in a way to allow data used by the CA engine during the simulation to be pre- and post-processed in the GIS environment.
Fig. 1. The overall architecture of REGISTA
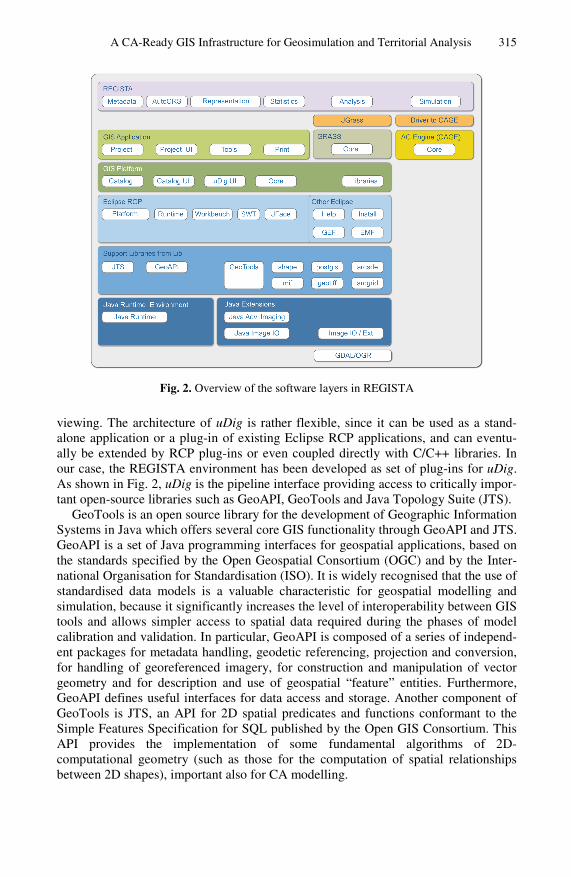
As shown in Fig. 2, the integrated environment is based on Eclipse Rich Client Platform (Eclipse RCP) technology, a Java platform for building and deploying native GUI applications to a variety of desktop operating systems like Windows, Linux and Mac OS X.
The specific GIS module of REGISTA is built around uDig (Use-friendly Desktop Internet GIS) core, an open-source Java solution for GIS data access, editing and
A CA-Ready GIS Infrastructure for Geosimulation and Territorial Analysis 315
Fig. 2. Overview of the software layers in REGISTA
viewing. The architecture of uDig is rather flexible, since it can be used as a stand-alone application or a plug-in of existing Eclipse RCP applications, and can eventu-ally be extended by RCP plug-ins or even coupled directly with C/C++ libraries. In our case, the REGISTA environment has been developed as set of plug-ins for uDig. As shown in Fig. 2, uDig is the pipeline interface providing access to critically impor-tant open-source libraries such as GeoAPI, GeoTools and Java Topology Suite (JTS).
GeoTools is an open source library for the development of Geographic Information Systems in Java which offers several core GIS functionality through GeoAPI and JTS. GeoAPI is a set of Java programming interfaces for geospatial applications, based on the standards specified by the Open Geospatial Consortium (OGC) and by the Inter-national Organisation for Standardisation (ISO). It is widely recognised that the use of standardised data models is a valuable characteristic for geospatial modelling and simulation, because it significantly increases the level of interoperability between GIS tools and allows simpler access to spatial data required during the phases of model calibration and validation. In particular, GeoAPI is composed of a series of independ-ent packages for metadata handling, geodetic referencing, projection and conversion, for handling of georeferenced imagery, for construction and manipulation of vector geometry and for description and use of geospatial “feature” entities. Furthermore, GeoAPI defines useful interfaces for data access and storage. Another component of GeoTools is JTS, an API for 2D spatial predicates and functions conformant to the Simple Features Specification for SQL published by the Open GIS Consortium. This API provides the implementation of some fundamental algorithms of 2D-computational geometry (such as those for the computation of spatial relationships between 2D shapes), important also for CA modelling.

316 I. Blecic et al.
2.1 The GIS Environment
The GIS environment is composed of the following modules: Input/output, Represen-tation, Statistics, Catalogue, Analysis.
The Input/Output module assists the user in importing and exporting spatial data (e.g. for recognising the Coordinate System). The Representation module allows for a rapid creation and visualisation of thematic maps. The Statistics module, still under development, will permit the generation of statistical reports.
The Catalogue module can access geospatial data with the capability of automati-cally extracting all relevant metadata. In addition, it provides some useful functional-ities for exploring and downloading information from Internet (e.g. from services provided by geoportals) and for associating geographic metadata to non-geographic documents.
The Analysis module makes available the common spatial analysis algorithms both for raster and vector data. As shown in Fig. 2, the analysis functions are provided by the JGrass component and are accessible in uDig through a specific console. In addi-tion, REGISTA offers specific user interfaces for easier access to frequently used analysis algorithm, like map algebra, among others.
2.2 The Simulation Module
The simulation module is based on the Cellular Automata General Environment (CAGE) C++ library [6,7]. The strength of the library lies in the generality of the underlying CA meta-model, permitting the implementation of a variety of CA models. Such generality is the result of some relaxation and enhancements of the classical CA assumptions and formulations.
Its underlying meta-model is a multi-layered CA (MLCA) in which the automata are organised in different layers [8]. The main advantage of such an approach is to simplify the coupling of many CA sub-models of dynamic phenomena evolving in the same geographical space (such as different regional and urban sub-models requiring different spatial and temporal resolution). Formally, the MLCA can be represented as the triple:
(1)
where each element in is a global parameter; the set groups together a series of global functions and is the set of layers of elementary automata. These elementary automata are what traditionally are known as “cells”. We prefer such a more general term, for elementary automata in REGISTA may represent not only cell-like entities, but also other geometrical objects like points or line segments. Every layer of elementary automata is defined as :
(2)
where each element in is a layer parameter; the set collects a series of layer functions and is a set of elementary automata. Every elementary automaton is defined as:
(3)
A CA-Ready GIS Infrastructure for Geosimulation and Territorial Analysis 317
where denotes the automaton state, the i-th element of which is a property defined in the domain , representing relevant local characteristics of the system; is the set of selection queries on elementary automata which define neighbourhoods as sets of elementary automata; is the set of rules defining the automaton transition function; is the reference to a portion of geographic space (e.g. a geo-referenced shape). A selection query is defined as:
(4)
being the set of all subsets of all automata belonging to the target layer . Thus, an elementary automaton from layer may have different neighbourhoods
, each defined as a subset of automata from a layer (allowing of course ). The rules in transform the sub-states , given their current values, the states of the neighbourhoods and the values of layer and global parameters.
The MLCA outlined above is a discrete dynamical system evolving in discrete steps. At each step, the simulation procedure first performs the execution of global and layer functions, then the updating of the neighbourhoods through the execution of queries in , and finally the updating of the states of each elementary automaton (randomly or synchronously) through the execution rules in .
Such a general meta-model allows the implementation of a large variety of types of CA-based models, including most well-known approaches used for the simulation of urban-related phenomena [9,10,11,12,13,14].
In particular, an important feature of the adopted MLCA regards the regularity of the grid, a characteristics of classical CA models. In the definition given above, each elementary automaton has a reference x to a geometric object, which can be geo-referenced, if necessary. This implies that the regularity and even the continuity of the space partitioning is only a particular case of this meta-model. Such extension has proven to be useful for modelling some urban phenomena. For example in [15] the urban model is based on the interaction among irregularly shaped entities of four kinds: street, roads, houses and gardens.
In addition, the dependency of transition functions on parameters permits global steering of the automaton evolution, which has been recognised important for the simu-lation of phenomena not completely reducible to local interactions (like for instance in cases where factors at the above-neighbourhood level should be taken into account in the transition function). An example of parameter-dependent approach are the so called constrained CAs which have been used for simulating land-use dynamics [11,12,13], where time-dependent parameters, often exogenously determined by independent demographic and economic macro-models, may determine the number of cells to allo-cate for every land-use type at each time step. Another example of this kind is the SLEUTH [9,10] model, where five global parameters steer different aspects of urban growth. In the MLCA, layer parameters also provide a way to extract synthetic informa-tion from layers. For example, the local evolution of a phenomenon evolving on layer
may depend on some global indicators of the phenomena evolving on layer . To permit the modelling of a range of complex systems different from classical
CAs, the automaton states are defined as a set of scalar variables describing rele-vant characteristics of the space portion corresponding to the elementary automata
318 I. Blecic et al.
(e.g. slope, land use, population density, elevation). In most models, only few cell properties (e.g. land use) are dynamically updated by a transition function, while others (like terrain slope) may be constant attributes throughout the simulation. Each cell property is, in practice, one of the basic typed variables made available by stan-dard programming languages. Since these variables can belong to finite domains with cardinality spanning from very low (e.g. boolean type) to very high (e.g. floating-point number type), a large number of states are possible for every elementary automaton. It is important to point out that the meta-model also contemplates the possibility of the so called auxiliary layers, containing only static objects, that is to say, elementary automata without dynamically updated sub-states. In urban model-ling, this can for example be useful to account for the proximity effects of urban enti-ties such as roads, services, facilities or infrastructures, assumed to remain static throughout the simulation. The separation of entities of different nature in different layers but still allowing for the simulation of their mutual interactions is a clear ad-vantage of our approach, and can easily be obtained because every elementary automaton can have neighbourhoods belonging to different layers, including auxiliary layers containing only static objects representing relevant urban entities.
In the adopted MLCA, the neighbourhoods of CAs are generalised through the concept of selection query on automata. Even if the great majority of CA applications successfully adopt a strictly local neighbourhood, the interactions among entities in geographical space may often take place over greater distances. For this reason, the MLCA model adopted in CAGE is partially based on the notion of proximal space, deriving from research in “cellular geography” [16]. Each elementary automaton can have a different neighbourhood, defined by relations of proximity of geographical entities, where proximity can be both a topological, or a more abstract functional relation. Accordingly, the concept of selection query in CAGE permits the definition of a neighbourhood as a generic subset of elementary automata, the state of which influences the state transition of the querying elementary automaton. It is worth not-ing that, since selection queries can be re-executed at every step of the simulation, the meta-model includes the capability of modelling non-stationary neighbourhoods (which may for example vary in size and shape during the system’s evolution). In addition, as will be shown later, more than one selection query can be associated to each elementary automaton, which means that different neighbourhoods, even belong-ing to different layers, may correspond to different rules of the transition function of one single elementary automaton.
Tables
XML model structure
REGISTADATACA
engine
XML inputscenario
StatisticsXML outputscenario
Tables
XML model structure
REGISTADATACA
engine
XML inputscenario
StatisticsXML outputscenario
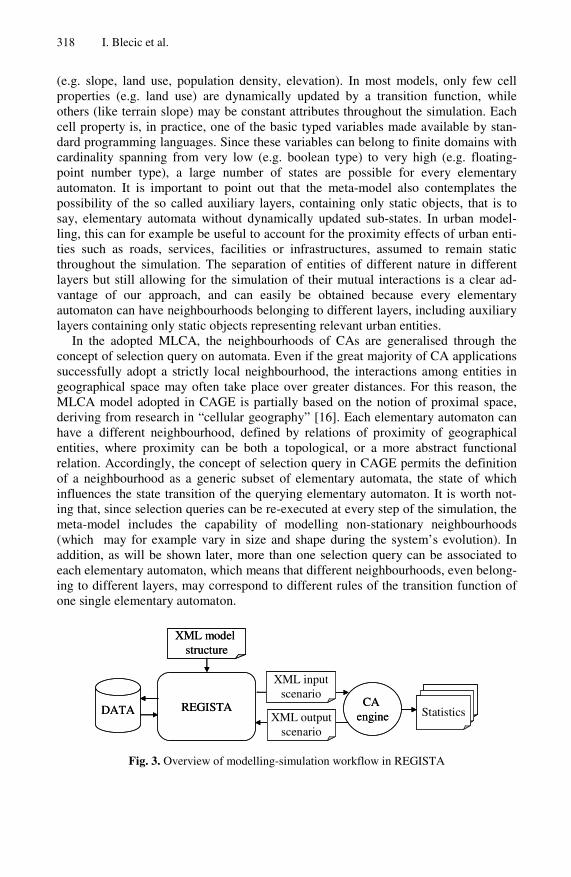
Fig. 3. Overview of modelling-simulation workflow in REGISTA
A CA-Ready GIS Infrastructure for Geosimulation and Territorial Analysis 319
In the CAGE C++ class library implementing the meta-model briefly outlined above, each MLCA element is implemented as an independent class, providing a suitable and expandable programming interface. For example, the class Elementary-Automaton is used as a base class from which to derive the actual classes of elemen-tary automata for a CA model. Among other things, this class comprises a list of cell properties, a list of neighbourhoods, the reference to a geometric object and several public methods for managing its attributes. Properties and neighbourhoods are objects as well, exposing many pre-defined functionalities of common use for building CA-based models (such as methods for creating standard neighbourhoods or for accessing properties of neighbouring automata).
2.3 Modelling and Simulation Workflow in REGISTA
A CA model in REGISTA consists of a plug-in for the CA engine and an XML docu-ment of the model structure which describes the organisation of the model in layers, model parameters, properties of elementary automata, and so on.
As represented in Fig. 3, once the model structure has been loaded, the simulation module provides user interfaces for building another XML which defines the input scenario starting from standard GIS layers. In this phase, the GIS environment of REGISTA offers all the commonly required functionalities (such as re-sampling of raster layers, sub-area extraction, cell-by-cell slope and/or aspect computation, inter-visibility analysis, and so forth).
In addition, the simulation module contains specific user interfaces for invoking the simulation engine and for configuring the preferences and initial conditions rele-vant for the simulation, among which the values of global and layer parameters, the number of time steps, and the output options.
The execution of the CA engine produces output scenarios in XML format, which can be directly loaded in REGISTA as a standard GIS layer, together with synthetic several statistics of the results of simulation (like the evolution of global and layer parameters over simulation steps).
The post-processing tasks are supported in REGISTA by tools provided by the ana-lytical and representation modules of the GIS environment.
3 Test Application Case-Studies
REGISTA software architecture has been extensively used for implementing different CA-models. In this section, we present variants of two well known models to better show the functioning and to point out the advantages of REGISTA. The first model is a CA simulation of urban growth [9,10], and the second is a land-use model [11,12,13].
3.1 Urban Growth Model
First operational assessment of the effectiveness of REGISTA as an integrated simu-lation-GIS environment has been undertaken through the development a SLEUTH-like urban growth model based on the CAGE library.
320 I. Blecic et al.
SLEUTH is one of the most popular CA-based simulation models of urban growth and of the related evolution of land uses as a diffusion process over time [9, 10]. The name comes from the GIS data layers required as inputs to the model: Slope, Land use, Exclusion layer, Urban, Transportation, and Hillshade.
The CA urban growth model (UGM) in SLEUTH has been widely applied [17]. The UGM uses square cells, with neighbourhoods of eight cells. The cell states repre-sent several static characteristics, corresponding to few above cited GIS data layers (the layer Hillshade is used only for representation purposes and the Land use layer is not used by the UGM), as well as dynamic characteristics of the urbanisation. The transition function depends on five integer parameters defined on the interval from 1 to 100. These parameters are:
• Dispersion, which determines the overall dispersiveness of the urbanisation; • Breed, which expresses the likelihood of a new isolated urban cell to begin its
own growth cycle; • Spread, which controls the diffusion by contagion from existing urbanised
cells; • Slope Resistance, which influences the likelihood of new urbanisation on steep
slopes; • Road Gravity, which regulates the generation of new urbanisation towards and
along roads.
The UGM transition function is composed of four probabilistic rules: (i) Spontaneous Growth, which consists of random spontaneous urbanisation of a fixed number of cells at each time step; (ii) New Spreading Centres, determining whether any of the new, spontaneously urbanised cells become a new urban spreading centre; (iii) Edge Growth, defining the component of growth which stems from existing spreading cen-tres; (iv) Road-Influenced Growth, accounting for the urbanisation related to the pres-ence of transportation infrastructure and therefore of the resulting better accessibility (for details see [17]).
Since the main purpose of our implementation of SLEUTH UGM in REGISTA is the assessment of the effectiveness of its integrated simulation-GIS infrastructure, the model implemented by us does not include some details such as the so called parame-ter self-modification [10].
The SLEUTH UGM represents an interesting test case for the evaluation of the characteristics of REGISTA, mainly because:
1. It is a parameter-dependent CA model, thus fitting well with the characteristics of the CAGE library that allows the definition of a set of layer parameters;
2. It is a “constrained” CA, since in the Spontaneous Growth rule the number of cells changing their state from non urban to urban is fixed, and this can be handled in a natural way using a specific layer-level function in the set ;
3. The transition function determines the interaction among each cell and its nearest neighbouring cells (for the New Spreading Centres and Edge Growth rules), as in a standard CA, but also the interaction with cells representing roads within a radius considerably larger than the size of single cells; this can be easily implemented defining two distinct neighbourhoods of cell, as con-templated by the meta-model described above;
A CA-Ready GIS Infrastructure for Geosimulation and Territorial Analysis 321
4. It requires a significant GIS pre-processing for initialising the scenario (e.g. for initialising the value of cells’ properties) and a non trivial post-processing phase for the computation of probability maps of urbanisation from the simu-lation results.
In particular, the simulation model under discussion is composed in REGISTA of one layer including the five layer-level parameters mentioned above. Each elementary automaton (i.e. cell) is characterised by a state composed of the following five scalar properties:
• Slope, representing the terrain slope in percent; • Exclusion, defining the level of resistance to urbanisation (e.g. open water bod-
ies take the value 100, while areas available for urban development take the value 0);
• Urban, which is the only dynamic property and represents the urbanisation state (can take the two values: urban and non urban);
• Road, derived from a road network GIS layer, and is also of binary type (road or non-road).
In order to implement the UGM transition function in REGISTA (i.e. the four above mentioned rules of the transition function), two distinct neighbourhoods are associ-ated to each elementary automaton. This is obtained by defining the set of selection queries as:
(5)
where gives the standard Moore neighbourhood while returns the nearest cell, located within a predefined radius, having . Both selection queries are exe-cuted only at the first time step of the simulation.
As shown in Fig. 4, in REGISTA the raster layers used for the production of the input scenario file have been elaborated from several raster files available on the SLEUTH web site [17]. Even if not strictly necessary, the visualisation capabilities of REGISTA are useful in the pre-processing phase for a preliminary assessment of qualitative characteristics of spatial data which can influence some modelling-related decisions (such as the extension of the area under study or the size of cells).
Since the raster files used for initialising the required GIS layers were not endowed with any kind of metadata, the specific REGISTA module for helping the attribution of a Coordinate Reference System (the AutoCRS module in Fig. 2) has been used in this phase. Subsequently, the required raster layers have been added to the map and attributed to respective elementary automata properties. Finally, using the simulation module, the input scenario incorporating values of global and layer parameters has been created.
As said before, the model under discussion is probabilistic. Therefore, a standard method for its use for prediction purposes consists of a Monte Carlo approach of execution of many simulations, the aggregate output of which are probability maps of urbanisation. For supporting this common type of post-processing, REGISTA permits the execution of a sequence of simulations whose output scenarios can be object of further analysis using the map algebra module integrated in the framework trough JGrass. In particular, a specific dialog window of the analysis module permits the
322 I. Blecic et al.
Fig. 4. A screenshot of REGISTA running a SLEUTH-like urban growth model
Fig. 5. An example of simulation outputs processed with REGISTA GIS capabilities: the vali-dation of results (simulated scenario after 10 steps vs. real scenario after 10 years): grey pixels represent land uses correctly “predicted” by the model, while white pixels represent a discrep-ancy between the two
definition of a formula for combining the raster maps of model outputs, in order to compute the frequency of urbanisation of every cell throughout the executed runs, for the purpose of estimating their urbanisation probability.

A CA-Ready GIS Infrastructure for Geosimulation and Territorial Analysis 323
In Fig. 5 a screenshot of a REGISTA-post-processed output, comparing the simu-lated scenario after 10 simulation steps vs. real urban growth after 10 years.
The SLEUTH UGM has been used in REGISTA with many different input scenar-ios and, on the whole, the test case has definitely highlighted the effectiveness of the framework in making this family of well-established CA models more accessible to standard GIS users.
3.2 Constrained Land-Use Model
Another test case model developed and experimented in REGISTA we with to present is a constrained CA for the simulation of the local land-use dynamics [11,12,13].
This model is “constrained” in the sense that at each time step the aggregate level of demand for each land use is fixed by an exogenous constraint. This constraint is defined on macro-level by external a-spatial demographic, economic and environ-mental models.
Our model is a simplified version of the one discussed in [11,12,13] since it has been devised for REGISTA testing purposes. However, its extension to a more de-tailed version is plainly straightforward.
In particular, the only dynamic property of the elementary automaton (i.e. cell) state represents the land use, and has been limited to the set {residential, rural, indus-trial}. Other properties of cells represent static land-use characteristics. These are: cell accessibility , suitability for different land uses (taking into account features like slope, terrain aspect and the presence of specific infrastructures), a Boolean value Zj for each land use, defining the exclusion of the j-th land use (for example due to zoning regulations or physical constraints). The state of the cell also includes a transition potential Pj for each land use j, expressing the level of propensity of the land to acquire the j-th type of use.
The cell neighbourhood is defined as the circular region of a given radius around the cell.
The first phase of the transition function consists of the computation of the transi-tion potentials for every cell, according to the equation:
(6)
where is a random perturbation factor and Nj is the so called neighbourhood effect. The latter represents the sum of all the attractive and repulsive effects of land uses and land covers within the neighbourhood, on the j-th land use which the current cell may assume. Since, in general, more distant cells in the neighbourhood have smaller influ-ence, in our REGISTA version of the model, the factor Nj is computed as:
(7)
where the summation is extended to all cells of the neighbourhood V (which does not include the owner cell itself). In Eq. 7 i denotes the current land use of the cell ; s is the cell size; d is the distance between the cell c and the current cell; the parame-ter aij represents the maximum influence (positive or negative) of the land use i on the
324 I. Blecic et al.
use j; dij is the distance in correspondence of which the contribution to the neighbour-ing effect is a fraction of the maximum value (currently ) and
. The positive term Ik, where k denotes the current land use of the cell, accounts for the effect of the cell on itself (zero-distance effect) and represents an inertia effect due to the costs of transformation from one land use to another.
The second phase of the transition function takes place on a non-local basis and consists of transforming each cell into the state with the highest potential, given the constraint of the overall number of cells in each state imposed by the exogenous trend for that iteration.
As for the SLEUTH UGM model discussed in section 3.1, this land-use model represents a significant test case for the purpose of evaluating REGISTA. In fact, the presence of a non-standard neighbourhoods and of a parameterised transition function including also non-local transformations, are both characteristics which can naturally be treated by the CAGE library. In addition, this model also requires a significant GIS pre-processing phase (e.g. for computing of accessibility and suitability for each cell).
In the developed model for REGISTA, a single layer of square cells has been used for the automaton. However, CAGE library could also allow irregular cells be used for this model.
The neighbourhood has been defined through a selection query executed only at the first simulation time step, which returns the cells located within a predefined ra-dius of 1000 m, excluding the owner cell.
A set of layer parameters hold the values of Ik, aij and dij of Eq. 7 and, once the XML model definition has been loaded in REGISTA, their value can be easily set by the user and stored in a scenario file.
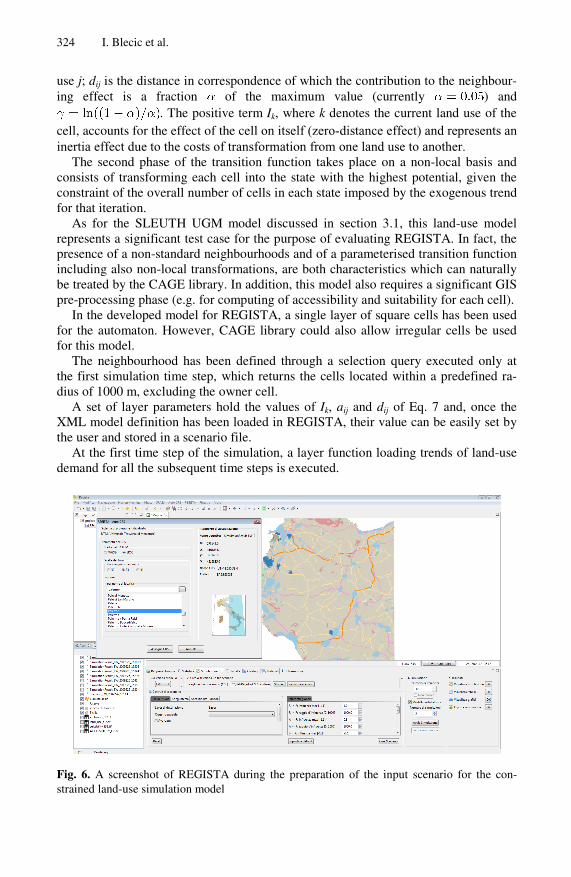
At the first time step of the simulation, a layer function loading trends of land-use demand for all the subsequent time steps is executed.
Fig. 6. A screenshot of REGISTA during the preparation of the input scenario for the con-strained land-use simulation model
A CA-Ready GIS Infrastructure for Geosimulation and Territorial Analysis 325
The local component of the transition function (i.e. the standard transition function executed on the cell level) computes the transition potential Pj according to Eqs. 6 and 7, while a layer function implements the transition algorithm. In the latter, all cells are ranked by their highest potential, and cell transitions begin with the highest ranked cell and proceed downwards until a sufficient number of cells have been attributed to every land use.
The model has been applied on a region in the western part of Sicily (Italy) using a grid of square cells of size 400x400 meters.
The initial scenario, corresponding to the situation in 1970, has been produced effi-ciently in REGISTA starting from vector layers (see Fig. 6) and exploiting the spe-cific rasterisation function offered by the analysis module. Then, the map algebra functionality has been used for the computation of the suitability maps, and JGrass console already present in uDig was used for the computation of the accessibility. Finally, through the simulation module, the raster layers have been associated to cells’ properties and incorporated into the XML scenario file, together with the values of layer parameters.
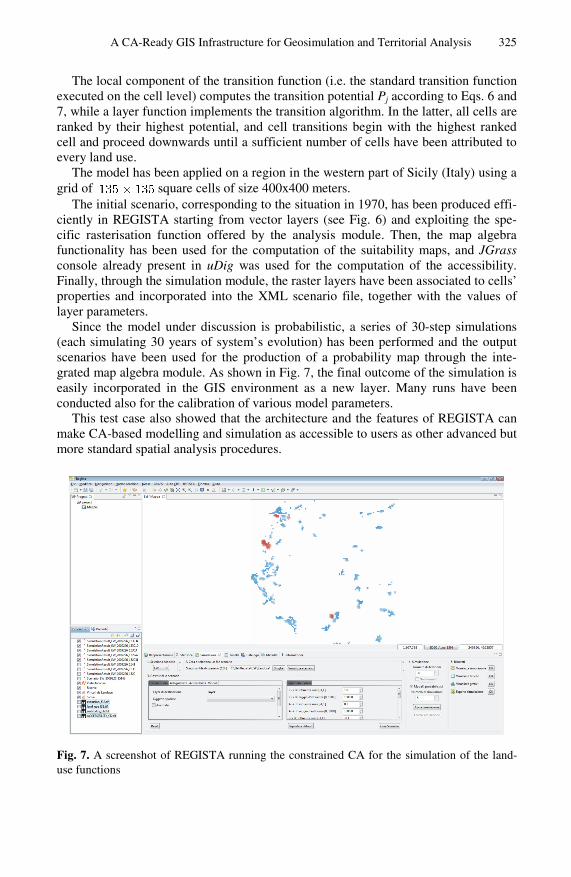
Since the model under discussion is probabilistic, a series of 30-step simulations (each simulating 30 years of system’s evolution) has been performed and the output scenarios have been used for the production of a probability map through the inte-grated map algebra module. As shown in Fig. 7, the final outcome of the simulation is easily incorporated in the GIS environment as a new layer. Many runs have been conducted also for the calibration of various model parameters.
This test case also showed that the architecture and the features of REGISTA can make CA-based modelling and simulation as accessible to users as other advanced but more standard spatial analysis procedures.
Fig. 7. A screenshot of REGISTA running the constrained CA for the simulation of the land-use functions
326 I. Blecic et al.
4 Conclusions
In this paper we have presented an effective integration between a generalised and flexible CA modelling framework and a GIS environment. The architectural charac-teristics of the integrated environment of REGISTA, built on top of several available open-source GIS libraries and applications and integrated with the CAGE cellular automata library, delivers satisfactory computational power without sacrificing the generality of the base CA meta-model of CAGE. This is a particularly relevant point given the fact that REGISTA was designed as a general-purpose CA modelling and simulation tool for territorial applications.
We have also briefly presented two test drives of REGISTA on two widely know CA models, which we hope have shown its effectiveness and user-friendliness for performing not only the modelling and simulation tasks, but also all the ancillary, often time-consuming activities of pre-processing of spatial data, scenario initialisa-tion, and analysis of results of simulation.
References
1. Batty, M., Xie, Y.: From cells to cities. Environment and Planning B, 31–48 (1994) 2. Batty, M.: Urban systems as cellular automata. Environment and Planning B 24, 159–164
(1997) 3. Cecchini, A.: Urban modelling by means of cellular automata: generalised urban automata
with the help on-line (AUGH) model. Environment and Planning B, 721–732 (1996) 4. Benenson, I., Torrens, P.M.: Geosimulation: object-based modeling of urban phenomena.
Computers, Environment and Urban Systems 28, 1–8 (2004) 5. Torrens, P., Benenson, I.: Geographic automata systems. International Journal of Geo-
graphical Information Science 19, 385–412 (2005) 6. Cecchini, A., Trunfio, G.A.: Supporting Urban Planning with CAGE: a Software Envi-
ronment to Simulate Complex Systems. Advances in Complex Systems 10(2s), 309–325 (2007)
7. Blecic, I., Cecchini, A., Trunfio, G.A.: A Generalized Rapid Development Environment for Cellular Automata Based Simulations. In: Sloot, P.M.A., Chopard, B., Hoekstra, A.G. (eds.) ACRI 2004. LNCS, vol. 3305, pp. 851–860. Springer, Heidelberg (2004)
8. Bandini, S., Mauri, G.: Multilayered Cellular Automata. Theoretical Computer Science, 99–113 (1999)
9. Clarke, K., Hoppen, S., Gaydos, L.: A self-modifying cellular automaton model of histori-cal urbanization in the san francisco bay area. Environment and Planning B 24, 247–261 (1997)
10. Clarke, K.C., Gaydos, L.J.: Loose-coupling a cellular automaton model and GIS: long-term urban growth predictions for San Francisco and Baltimore. International Journal of Geographic Information Science, 699–714 (1998)
11. White, R., Engelen, G.: Cellular automata and fractal urban form: A cellular modeling ap-proach to the evolution of urban land-use patterns. Environment and Planning, 1175–1199 (1993)
12. White, R., Engelen, G., Uljee, I.: The use of constrained cellular automata for high-resolution modelling of urban land use dynamics. Environment and Planning B: Planning and Design 24, 323–343 (1997)
A CA-Ready GIS Infrastructure for Geosimulation and Territorial Analysis 327
13. White, R., Engelen, G.: High-resolution integrated modelling of the spatial dynamics of urban and regional systems. Computers, Environment and Urban Systems 24, 383–4000 (2000)
14. Wu, F.: GIS-based simulation as an exploratory analysis for space-time processes. Journal Geographic Systems, 199–218 (1999)
15. Erickson, B., Lloyd-Jones, T.: Experiments with settlement aggregation models. Environ-ment and Planning B, 903–928 (1997)
16. Tobler, W.: Cellular geography. In: Gale, S., Olsson, G. (eds.) Philosophy in Geography, pp. 379–386. Reidel Publishing Company, Dordrecht (1979)
17. Project Gigalopolis, NCGIA (2003), http://www.ncgia.ucsb.edu/projects/gig/





























