Embed Size (px)
Citation preview
ГОСУДАРСТВЕННОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ ВЫСШЕГО ПРОФЕССИОНАЛЬНОГО ОБРАЗОВАНИЯ
УФИМСКИЙ ГОСУДАРСТВЕННЫЙ АВИАЦИОННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
На правах рукописи
I0U0Q.8 1 6393 -
СЕМЕНОВ ВАСИЛИЙ ВЛАДИМИРОВИЧ
АВТОНОМНАЯ СИСТЕМА ЭЛЕКТРОСНАБЖЕНИЯ НА ОСНОВЕ АСИНХРОНИЗИРОВАННОГО СИНХРОННОГО ГЕНЕРАТОРА
Специальность 05.09.03 - Электротехнические комплексы и системы
ДИССЕРТАЦИЯ на соискание учёной степени кандидата технических наук
Научный руководитель —
кандидат технических наук, доцент
Султангалеев Рафиль Наилевич
Уфа - 2008
2
ОГЛАВЛЕНИЕ
Введение 5
1. СОВРЕМЕННОЕ СОСТОЯНИЕ И ПЕРСПЕКТИВЫ РАЗВИТИЯ
АВТОНОМНЫХ ЭНЕРГЕТИЧЕСКИХ УСТАНОВОК 12
1.1. Общая характеристика автономных систем электроснабжения 13
1.2. Методы исследования автономных систем электроснабжения 22
1.3. Общие принципы управления асинхронизированным синхронным
генератором 33
1.4. Состояние вопроса и постановка задачи исследования 45
2. ИССЛЕДОВАНИЕ ЭЛЕКТРОМАШИННЫХ СИСТЕМ В АВТОНОМНОЙ
СИСТЕМЕ ЭЛЕКТРОСНАБЖЕНИЯ С ВОЗБУЖДЕНИЕМ ПЕРЕМЕННЫМ
ТОКОМ 47
2.1. Система относительных единиц. Приведение параметров вторичной
обмотки к первичной 47
2.2. Основные модули автономной системы электроснабжения и их
моделирование в пакете Matlab/Simulink 50
2.3. Построение нечеткого регулятора в системе MATLAB 63
2.4. Модель автономной системы электроснабжения 70
Выводы по второй главе 72
3. АНАЛИЗ ХАРАКТЕРИСТИК МОДЕЛИ АСИНХРОНИЗИРОВАННОГО
СИНХРОННОГО ГЕНЕРАТОРА ПРИ АВТОНОМНОЙ РАБОТЕ 74
3.1. Основные энергетические соотношения 74
3.2. Методика измерения и построения характеристик генератора 86
3.3. Электромеханические характеристики автономной системы
электроснабжения 88
3
3.4. Электромеханические характеристики при регулировании тока
возбуждения асинхронизированного синхронного генератора 95
Выводы по третьей главе 106
4. ЭКСПЕРИМЕНТАЛЬНОЕ ИССЛЕДОВАНИЕ ЭЛЕКТРОМАГНИТНЫХ
ПРОЦЕССОВ В АСИНХРОНИЗИРОВАННОМ СИНХРОННОМ
ГЕНЕРАТОРЕ 108
4.1. Описание экспериментальной установки для исследования
электромагнитных процессов в асинхронизированном синхронном
генераторе 109
4.2. Построение преобразователя частоты для асинхронизированного
синхронного генератора 116
4.3. Экспериментальное определение параметров универсальной машины
переменного тока 120
4.4. Характеристики асинхронизированного синхронного генератора и
проверка адекватности модели 122
Выводы по четвертой главе 134
Заключение 136
Библиография 139
Приложение А. - Методика расчета универсальной машины 152
Приложение Б. - Технические характеристики электромашинного агрегата
ЭА-3 экспериментальной установки «Модель электрической системы» ... 176
Приложение В. - Технические данные системы ввода аналоговых данных в
компьютер Handyprobe и измеритель RLC Е7-22 179
Приложение Г. - Расчет погрешности измерения выполненного цифровым
измерителем Е7-22 182
4
СПИСОК СОКРАЩЕНИЙ
АГ - асинхронный генератор;
АД - асинхронный двигатель;
АРВ — автоматическое регулирование возбуждением;
АСГ - асинхронизированный синхронный генератор;
АСЭ — автономная система электроснабжения;
АЦП - аналого-цифровой преобразователь;
КЗ - короткое замыкание;
КПД - коэффициент полезного действия;
МДС — магнитодвижущая сила;
НЛ - нечеткая логика;
HP - нечеткий регулятор;
ПВМ - пространственно векторная модуляция;
ПКЭ - показатели качества электрической энергии;
ПЧ - преобразователь частоты;
ПЭВМ - персональная электронная вычислительная машина;
СГ - синхронный генератор;
ТКЗ - ток короткого замыкания;
ЦАП - цифро-аналоговый преобразователь;
ШИМ - широтно-импульсная модуляция;
ЭДС - электродвижущая сила;
ЭМ - электрическая машина;
ЭУ - экспериментальная установка.
5
ВВЕДЕНИЕ
Актуальность. Современная тенденция развития энергетики состоит в
стремлении к сбалансированности энергорайонов, повышении надежности
электроснабжения потребителей. Важное место в стратегии развития
электроэнергетики занимают автономные системы электроснабжения (АСЭ). В
последнее время АСЭ получают все более широкое распространение в системе
электроснабжения не только специального, но и общего применения.
Указанные системы используются почти во всех отраслях народного хозяйства,
их крупнейшими потребителями являются топливно-энергетический,
агропромышленный и машиностроительный комплексы страны. Области
применения таких генераторов охватывают электроагрегаты (стационарные,
судовые, передвижные) и управляемые электромеханические системы
(строительно-дорожные, транспортные и самоходные машины,
ветроэнергетические установки и малые ГЭС, генераторы, работающие на
статические преобразователи частоты и электромашинно-разделительные
агрегаты), системы бесперебойного питания ответственных потребителей, в
том числе современные вычислительные комплексы.
Необходимость в них возникает там, где технически невозможно или
экономически не выгодно использовать централизованное электрическое
снабжение, например на движущихся объектах. А это, в первую очередь
труднодоступные объекты, удаленные от крупных электрических систем, и
имеющие собственные источники первичной энергии, например, газовые и
нефтяные месторождения. АСЭ находят широкое применение в
промышленности, строительстве, сельском и коммунальном хозяйствах. Они
работают на предприятиях, в аэро-, морских и речных портах, в энергоблоках
больниц, фермерских хозяйствах, в системах аварийного энергоснабжения, на
объектах оборонного комплекса - везде, где необходима электроэнергия, а сеть
или удалена или работает с перебоями.
б
В таких условиях решение проблем управления автономными
энергетическими комплексами, прежде всего в части оптимизации процессов
электроснабжения предприятий, с позиций энергосбережения и минимизации
затрат представляет собой важную задачу.
Обеспечение качества электроэнергии для потребителей АСЭ
промышленной частоты имеет существенное значение. Получение стабильной
частоты при переменной частоте вращения приводного двигателя является
одной из важных задач для АСЭ. Существует проблема обеспечения
стабильных параметров электрической энергии, получаемой преобразованием
механической энергии от нестабильного ее источника, например, вето
двигателя. Та же проблема существует и при работе от стабильного источника
механической энергии, но при нестабильной электрической нагрузке.
Эффективным способом решения этой проблемы является преобразование
механической энергии в электрическую асинхронизированными синхронными
генераторами (АСГ). В связи с этим, последние годы наблюдается усиление
интереса инженеров и исследователей к асинхронизированным машинам,
которые в полной мере могут решить поставленные задачи для АСЭ.
Важное значение имеет изучение параллельной работы автономных
источников с сетью. При этом возникает ряд специфических вопросов
совместной работы автономных систем с централизованной сетью.
Большой вклад в развитие асинхронизированных машин, в создание
современной теории их управления и практического использования внесены
отечественными учеными проф. М.М. Ботвинником, по инициативе и под
руководством которого эти работы были начаты во ВНИИЭ в 1955 г., и его
последователем проф. Ю.Г. Шакаряном. Большой вклад в теорию и практику
внесли исследования, выполненные Н.Н. Блоцким, В.И. Радиным,
И.А. Лабунцом, А.П. Лохматовым, Л.Г. Мамиконянцем, И.М. Постниковым,
СВ. Покровским, З.Н. Сазоновым и др. [1]. Практическая реализация работ по
внедрению асинхронизированных генераторов началось в 60-х годах, наиболее
7
значимой из которых явилось ввод в эксплуатацию 2-х асинхронизированных
гидрогенераторов мощностью по 40 МВт Иовской ГЭС (Колэнерго). Среди
зарубежных ученных, данной тематикой занимались J.C. Clare, A. Kahn,
L.M. Ricardo, R. Репа, R.M. Sebastian и др. [1, 2, 3, 4, 5].
Бесперебойное обеспечение энергией предполагает наличие автономного
источника для электроснабжения особой группы электроприемников первой
категории. Выбор типа источника определяется его назначением, потребляемой
мощностью, наличием или отсутствием сети электроснабжения,
географическим положением потребителя и допустимыми затратами.
Анализ результатов исследований отечественных и зарубежных ученых
показал, что применение АСГ для автономных систем, работающих на
различную нагрузку, изучены недостаточно. Мало исследованы вопросы
влияния частоты вращения вала приводного двигателя на качество переходного
процесса при автономной работе генератора.
Одним из серьезных препятствий на пути внедрения АСГ в автономных
системах является проблема создания простой и надежной системы
стабилизации напряжения по амплитуде и частоте, что требует проведения
соответствующих исследований. В последние время предъявляются
повышенные требования к качеству электроэнергии, что накладывает
соответствующие требования к системам управления с возможно более
универсальными свойствами.
Несмотря на то, что асинхронизированные синхронные генераторы
обладают рядом ценных качеств, в настоящее время они наименее изучены.
Исследованию теории и практики управления автономными энергетическими
комплексами и энергосбережением посвящено достаточно большое количество
работ отечественных и зарубежных специалистов. Однако, на уровне АСЭ эти
исследования разрознены и не в полной мере способствуют решению данной
проблемы. Поэтому, исследование АСГ для автономных систем, работающих
на различную нагрузку, является актуальной задачей.
8
Основания для выполнения работы. Диссертационная работа
выполнена в Уфимском государственном авиационном техническом
университете по плану научно-исследовательских работ по теме АП-ЭМ-02-04-
ХГ.
Целью выполнения диссертационной работы является создание
автономной системы электроснабжения на базе асинхронизированного
синхронного генератора, обеспечивающей требуемые показатели качества
выходного напряжения при переменной частоте вращения приводного
двигателя.
Основные задачи исследования:
1. Создание математической модели асинхронизированного синхронного
генератора и расчет его статических характеристик при автономной работе.
2. Исследование переходных процессов АСГ с помощью математического
пакета Matlab
3. Разработка системы регулирования тока возбуждения АСГ,
обеспечивающей необходимые показатели качества электроэнергии.
4. Создание комплекса программ для исследования автономной системы
электроснабжения.
5. Экспериментальное исследование АСГ с использованием пакета
Lab View для проверки адекватности полученных теоретических результатов.
Методы исследований. При решении поставленных задач
использовались как теоретические, так и экспериментальные методы
исследования. Научные исследования основывались на применении методов
теории электромеханического преобразования энергии, общей теории
дифференциальных уравнений, методов современной теории автоматического
управления, теории нелинейных систем, теории нечетких множеств, теории
дискретных систем, теории устойчивости. При решении задач исследования
статических и динамических режимов работы АСЭ, для определения структуры
и параметров предложенной модели использовались методы компьютерного
9
моделирования на основе математического пакета MatLablSimulink. В ходе
экспериментального исследования использована программная среда Lab View
для решения задачи управления и наблюдения над электромеханическими
системами.
На защиту выносятся:
1. Структура автономной системы электроснабжения, включающая
регулируемый преобразователь частоты с ШИМ-модуляцией.
2. Методика построения характеристик асинхронизированного
синхронного генератора - синхронная машин двойного питания - при
автономной работе.
3. Математическая модель для исследования переходных процессов
автономной системы электроснабжения на базе универсальной машины
переменного тока с помощью математического пакета MatLablSimulink.
4. Система регулирования возбуждения асинхронизированного
синхронного генератора на основе нечеткой логики, позволяющая обеспечить
требуемые показатели качества электроэнергии.
5. Результаты экспериментальных исследований, подтверждающие
адекватность математической модели и достоверность полученных
теоретических данных.
Научная новизна.
1. Разработана система автоматического регулирования возбуждения
асинхронизированного синхронного генератора на основе теории нечетких
множеств, позволяющая улучшить динамические характеристики и повысить
показатели качества электроэнергии в автономных системах электроснабжения.
2. Создана математическая модель разработанной автономной системы
электроснабжения, позволяющая построить статические и динамические
характеристики асинхронизированного синхронного генератора.
10
3. Определены наиболее рациональные режимы работы автономной
системы электроснабжения при изменении нагрузки АСГ и частоты вращения
приводного двигателя.
4. Разработано программное обеспечение для исследования автономной
системы электроснабжения на базе универсальной машины переменного тока с
предложенной системой автоматического регулирования.
Практическую ценность имеют:
1. Создание АСЭ на базе АСГ с показателями качества
удовлетворяющими требованиям действующих ГОСТов.
2. Рассчитаны пределы регулирования напряжения возбуждения для
универсальной машины при различной частоте вращения приводного
двигателя.
3. Предложены программы анализа переходных и установившихся
режимов универсальных машин переменного тока с системой возбуждения,
регулируемой алгоритмами на основе теории нечетких множеств, для
автономных систем электроснабжения, защищенные свидетельством об
официальной регистрации программ для ПЭВМ.
4. Спроектирован и выполнен образец преобразователя частоты с
микропроцессорным управлением для системы регулирования тока
возбуждения асинхронизированного синхронного генератора.
Внедрение результатов работы. Материалы диссертационной работы
используются для проектирования автономных систем электроснабжения в
ООО «Энергоинновация». Результаты работы используются в учебном
процессе УГАТУ при подготовке бакалавров, инженеров и магистров
специальностей 140601 «Электромеханика» и 140205 «Электроэнергетические
системы и сети».
Апробация работы. Основные положения работы были доложены и
обсуждены на международной научно-технической конференции «Энергетика
и энергоэффективные технологии» - 2006 г. (г. Липецк), на Всероссийской
и молодежной научно-технической конференции «Интеллектуальные системы
управления и обработки информации» - 2003 г. (г. Уфа), на научно-
практической конференции молодых ученых, аспирантов и студентов
«Молодежная наука и АПК: проблемы и перспективы» - 2005 г. (г. Уфа), на
научно-технической конференции «Электромеханика, электротехнические
комплексы и системы» 2005 г. (г. Уфа), научно-техническая конференция
«Электромеханика, электротехнические комплексы и системы» 2006 г. (г. Уфа),
научно-техническая конференция «Электромеханика, электротехнические
комплексы и системы» 2007 г. (г. Уфа), Всероссийской молодежной научной
конференции «Мавлютовские чтения» 2007 г. (г. Уфа).
Публикации. По теме диссертации опубликовано 14 печатных работ,
включая 1 статью в издании из перечня, утвержденного ВАК России («Вестник
саратовского государственного технического университета»), 11 статей, два
свидетельства об официальной регистрации программ для ЭВМ в РосАПО.
Структура и объем диссертации. Диссертационная работа состоит из
введения, четырех глав, заключения, списка использованной литературы из 142
наименований и 4-х приложений. Основная часть диссертации изложена на 151
страницах машинописного текста и содержит 68 рисунков и 6 таблиц.
12
ГЛАВА 1
СОВРЕМЕННОЕ СОСТОЯНИЕ И ПЕРСПЕКТИВЫ РАЗВИТИЯ
АВТОНОМНЫХ ЭНЕРГЕТИЧЕСКИХ УСТАНОВОК
Современный уровень развития энергетики является одним из главных
показателей развития страны. Чтобы удовлетворять постоянно растущие
потребности общества в электроэнергии, с каждым днем создаются все более
новые системы и комплексы по генерации электро- и тепловой энергии.
Когда электроэнергетика только зарождалась, и Томас Эдисон установил
небольшую ТЭЦ в близи Уолл-Стрит в 1882 году, он представлял, что
множество электростанций будут располагаться вблизи домов, офисов и
предприятий, снабжая их теплом и электроэнергией. Прошлое столетие,
опровергло предвидение великого изобретателя, отдав предпочтение крупным
электростанциям, но на рубеже XXI века мировое сообщество вновь
повернулось лицом к малой энергетике [6].
Российская энергетика вступает в полосу перемен, и от успешности
нововведений, будет зависеть развитие экономики в целом. Тот огромный
дефицит электроэнергии, о котором упоминают, еще не наступил, но перебои в
обеспечении потребителей электроэнергией становятся всё более частыми [7].
Предприятия, выстроившие и отладившие технологические цепочки,
понимают, что надежность производства можно повышать, лишь установив
собственные энергоисточники. Многие организации уже имеют собственные
паросиловые, газо-поршневые и газотурбинные электростанции. Их
автономные электростанции вырабатывают от десятков кВт до нескольких
десятков МВт электроэнергии и эксплуатируются в базовом режиме. Рост
производства автономных источников электроэнергии позволяет удовлетворять
возросшие требования к качеству и надежности энергоснабжения. Данное
направление является экономически и логически оправданным дополнением к
существующим централизованным системам электроснабжения [7, 8, 9].
13
Самостоятельные энергоисточники не являются альтернативой
энергосистеме, а лишь дополняют ее, повышая надежность обеспечения
потребителей.
Развитие малой энергетики для России - это жизненно важный фактор,
так как более 50 % территории страны не имеют связи с энергосистемой, и
надежное энергоснабжение может быть обеспечено небольшими
изолированными системами электроснабжения [7, 10].
О перспективности указанного направления свидетельствует мировой
опыт. Так в США мощность ежегодно вводимых малых станций составляет
30 % от общей вводимой мощности. На Западе трудно найти предприятие без
резервного электроисточника, так как всеобщая компьютеризация делает труд
зависимым от стабильного энергоснабжения. В Израиле ими обеспечиваются
все жилые дома, имеющие более четырех этажей. Эту практику вводят и
европейские страны [7, 11].
Западные специалисты высказывают предположение, что автономные
электростанции и локальные энергетические сети будут объединены в единую
мировую систему (по типу Интернета), что не исключает их автономной
работы в своем регионе [12].
В соответствии с основным положением «Теории надёжности» стоимость
эксплуатации исчерпавшего свой ресурс оборудования со временем возрастает
в геометрической прогрессии. По этой причине государству, которое является
собственником сетей, всё труднее поддерживать сети и генерирующие
мощности в исправном состоянии. Решение этой проблемы многие
специалисты видят в создании новых локальных, автономных и
распределенных систем генерации электричества и тепла [13].
1.1. Общая характеристика автономных систем электроснабжения
Особенностью рассматриваемых объектов малой энергетики является
переменная частота вращения приводного вала двигателя, что накладывает
дополнительные требования, как к генераторам, так и к системам
14
автоматического регулирования возбуждением (АРВ). Стабилизация
параметров генерируемой электроэнергии, амплитуды и частоты напряжения
при переменной частоте вращения - одна из основных технических задач при
создании АСЭ.
В автономных системах и схемах электроснабжения общего применения
наиболее распространены синхронные генераторы нормальной конструкции.
Сначала XXI века стали применять асинхронизированные генераторы, которые
позволяют расширить функциональные возможности АСЭ.
В последнее время повысился интерес инженеров и исследователей к
асинхронизированным машинам, которые представляют собой
электромеханический комплекс, состоящий из электрической машины,
возбудителя и автоматического регулятора возбуждения. Это объясняется
двумя обстоятельствами: с одной стороны, в ряде областей техники появились
задачи, которые не решаются или решаются не лучшим образом с помощью
традиционных методов; с другой стороны, созданы средства, с помощью
которых можно реализовать эффективное управление асинхронизированных
машин. Среди них, в первую очередь, нужно отметить силовые
полупроводниковые устройства и элементы микропроцессорной техники [1, 14,
15, 16].
Требования, предъявляемые к генераторам АСЭ, в основном
определяется условиями их применения и являются весьма разнообразными и
противоречивыми. Так, для генераторов передвижной энергетики характерны
жесткие ограничения по массогабаритным показателям, а также высокие
требования по сроку службы и обеспечению надежной работы в широком
диапазоне климатических условий и повышенных механических нагрузок. Для
генераторов, используемых в современных вычислительных комплексах и в
специальных автономных системах, определяющим являются требование к
качеству электроэнергии. В ряде случаев условия эксплуатации исключают
использование контактно-щеточного узла [3, 17, 18].
15
Основным достоинствам АСГ по отношению к синхронным генераторам
(СГ) и асинхронным генераторам (АГ) является то, что асинхронизированные
синхронные генераторы способны генерировать напряжение постоянной
частоты при переменной частоте вращения. Они обладают принципиально
большими, чем синхронные генераторы, пределами устойчивости.
Асинхронизированные машины способны экономично регулировать
реактивную мощность при параллельной работе с сетью. Они особенно
эффективны там, где по условиям эксплуатации требуется регулирование
частоты вращения в сравнительно ограниченных пределах выше и ниже
синхронной. Асинхронизированные компенсаторы и двигатели при
определенном управлении и наличии соответствующей маховой массы
способны не пропускать толчки активной и реактивной мощности нагрузки в
питающую сеть, обеспечивать демпфирование колебаний не только
напряжения, но и частоты [2, 14, 15, 19].
Однако практически реализовать эти важные свойства
асинхронизированного генератора в полной мере удалось лишь в настоящее
время. Достигнутый в последние десятилетия прогресс в области силовой и
информационной электроники позволили создать доступные и надежные
вентильные (полупроводниковые) преобразователи электроэнергии и элементов
интегральной микроэлектроники с различными параметрами и
характеристиками. Это обстоятельство в сочетании с возросшей
необходимостью использования в электроэнергетике гибких управляемых
генерирующих и потребляющих электроэнергию систем, стало предпосылкой
для активизации, как во всем мире, так и в нашей стране, исследований и
разработок управляемых комплексов (каскадов) на базе синтеза синхронных и
асинхронных машин и вентильных преобразователей. Работы по исследованию
и внедрению АСГ в энергетику ведутся как отечественными, так и
зарубежными предприятиями. Например, ОАО «Электросила», ОАО «ВНИИЭ»
среди зарубежных фирм, в Германии - Siemens, AEG, AKW, в Японии - Hitachi,
в Норвегии - ABB Corporate Research. Накопленный отечественный и мировой
16
опыт в исследовании и разработке АСГ как для АСЭ, так и для энергетики в
целом, позволяет сделать вывод о несомненной актуальности подобных
исследований [1, 20, 21, 22, 23, 24].
Разнообразие областей применения автономных источников с
соответствующими требованиями к приводу, качеству генерируемой
электроэнергии, конструкций и условиям эксплуатации обусловило
необходимость использования различных типов привода и электрических
машин.
В работах [2, 14, 15] рассматривается автономная система с СГ или АГ с
использованием преобразователей частоты (ПЧ) в цепи статора генераторов.
Исходя из этого, ПЧ должны выбираться на полную мощность номинальной
нагрузки. Данное решение приводит к дополнительным потерям и удорожанию
генерируемой мощности системы. При параллельной работе АСЭ с сетью
соизмеримой и бесконечной мощности, в основном, рассматривается варианты
на основе СГ и АГ [25, 26, 27, 28, 29, 30].
1.1.1. Анализ требований, предъявляемых к генераторам
автономных источников питания
Процесс развития машин автономных источников питания неразрывно
связан с ужесточением предъявляемых к ним требований, что вызвано, как
требованиями к качеству генерируемой электроэнергии, так и усложнением
условий эксплуатации.
Функциональное назначение, особенности нагрузки и условия
эксплуатации электрических машин автономных источников питания
выдвигает ряд требований, которые могут быть сформулированы следующим
образом [13, 31, 32]:
- соблюдение минимальных масс и габаритных размеров;
- высокая надежность;
- работа при значительных внешних механических и тепловых нагрузках,
а также при перегрузках по мощности в различных нейтральных и агрессивных
17
средах с повышенным и пониженным давлением, возможность экономичного
регулирования в широких пределах выходного напряжения с высокой
точностью;
-жесткость конструкции, малые аксиальные размеры и надежность
работы подшипниковых узлов при размещении на одном валу двух и более
машин;
- хорошие условия теплоотдачи и вентиляции;
- высокий уровень энергетических, экономических, эксплуатационных и
других показателей;
- высокое качество выдаваемой электроэнергии — синусоидальная форма
кривой выходного напряжения, кратковременность протекания переходных
электродинамических процессов;
-высокая стабильность выходного напряжения при значительной
несимметрии и мгновенных сбросах и набросах нагрузки;
-устойчивость систем регулирования напряжения при изменении в
широких пределах нагрузки; малый коэффициент модуляции выходного
напряжения и др.
Электрические машины, используемые в автономных источниках
питания до настоящего времени, необходимо совмещение разнообразных и
противоречивых требований и характеристик, которые обеспечивается
недостаточно. Это можно иллюстрировать примерами [3, 33, 34, 35, 36, 37].
1. В машинах переменного тока с электромагнитным возбуждением и
щеточным контактом при повышенном использовании активных материалов
трудно получить безотказное самовозбуждение, высококачественные
характеристики электроэнергии, высокую надежность.
Для самовозбуждения и устойчивой работы генераторов с регуляторами
напряжения необходимы: относительно большой остаточный поток (15-20 %),
, который обычно в этих машинах не превышает 1-5 % рабочего потока
возбуждения; малая мощность обмоток индуктора и узкая петля гистерезиса
характеристики намагничивания. Введение в магнитную цепь участков из
18
магнитотвердой стали, существенно увеличивает мощность возбуждения и
площадь петли гистерезиса, что в ряде случаев недопустимо. При этом
увеличение остаточного потока оказывается недостаточным для
самовозбуждения, которое обеспечивается путем усложнения схем управления.
В то же время для устойчивой работы систем регулирования необходима
нелинейность начального участка характеристики намагничивания, которая
соответствует остаточному потоку, равному 15-20 % рабочего потока
возбуждения [3, 34, 26, 33, 35, 37].
2. Стабильность выходного напряжения генераторов с электромагнитным
возбуждением резко нарушается при мгновенных изменениях нагрузки и
несимметричном ее распределении между фазами, которые не могут быть
устранены регуляторами напряжения. Для уменьшения мгновенных изменений
напряжения (всплесков, провалов) и несимметрии напряжений синхронные
генераторы выполняют с низкой линейной нагрузкой, что значительно
увеличивает их массу [3, 34, 35, 36, 37].
3. Синхронные машины с постоянными магнитами обладают
безотказным самовозбуждением и высоким качеством электромагнитных
характеристик, но не допускают непосредственного и экономичного
регулирования напряжения, что ограничивает их применение в современных
источниках питания [26, 35, 36, 38].
4. Бесконтактные синхронные генераторы с электромагнитным
возбуждением обладают высокой механической прочностью и надежностью
при работе на больших частотах вращения и имеют, примерно, в 2 раза
большую массу, низкие электромагнитные характеристики и большие
аксиальные размеры по сравнению с аналогичными машинами с контактными
кольцами и вращающимися обмотками [26, 34, 35, 36].
5. Применение бесконтактных источников питания определяет
необходимость решения ряда дополнительных проблем, связанных с
получением высокого уровня электромагнитных и энергетических показателей
при минимальной массе систем электропитания, в том числе таких, как
19
обеспечение высокой стабильности и синусоидальной формы кривой
выходного напряжения при значительной несимметрии и мгновенных
изменениях нагрузки, получение низкого коэффициента пульсаций
выпрямленного напряжения, кратковременность протекания
электромеханических переходных процессов и т.п. [3, 15, 26, 33, 34, 36].
6. При необходимости иметь несколько независимых цепей питания,
отличающихся родом тока, напряжениями и их стабильностью, автономным
характером изменения нагрузок и пр., важным вопросом является разработка
генератора с автономными цепями или рациональный выбор типов
минимального числа генераторов и устройств регулирования напряжений [3,
34,35].
Таким образом, совмещение в одних лишь машинах с электромагнитным
возбуждением относительно небольшого комплекса противоречивых
требований без принятия специальных мер встречает непреодолимые
трудности.
Эти плохо согласующиеся между собой требования существенно влияют
на технологичность и надежность конструкций, на массу, габаритные размеры
и специальные характеристики автономных источников питания в целом.
1.1.2. Способы возбуждения генераторов автономных систем
Для преобразования механической энергии в электрическую энергию
переменного напряжения используются синхронные и асинхронные генераторы
различных типов и конструкций.
До настоящего времени наибольшее распространение в АСЭ получили
синхронные генераторы с контактными кольцами. Например, явнополюсные
синхронные генераторы с электромагнитным возбуждением, обеспечивающие
генерирование переменного тока частотой 50 Гц в диапазоне мощностей от 30
до 200 кВт имеют КПД 87 - 92 % и удельную массу - 7 - 12 кг/кВт [11, 39, 36,
38]. Однако обычная конструкция СГ с контактными кольцами имеет ряд
существенных недостатков, главные из которых: ненадежная работа узла
20
контактных колец и необходимость в дополнительных устройствах для
обеспечения возбуждения. Кроме этого, для включения СГ в параллельную
работу требуется дополнительная регулирующая и контролирующая
аппаратура [40, 41].
Одно из направлений качественного улучшения характеристик АСЭ -
разработка и внедрение бесконтактных электрических машин (ЭМ),
обладающих высокой надежностью, работающих с повышенными
электромагнитными и механическими нагрузками, имеющих улучшенные
малогабаритные и энергетические показатели, обладающих улучшенными
эксплуатационными качествами и широким диапазонам допустимых
окружающих условий.
Наиболее простым по конструкции и надежным бесконтактным
генератором является асинхронный генератор. Применение асинхронных
генераторов в основном сдерживалось по двум причинам: из-за отсутствия
малогабаритных силовых конденсаторов, обеспечивающих возбуждение
генератора и компенсацию реактивной мощности нагрузки, а также вследствие
сложности стабилизации выходного напряжения. Разработанные в последние
годы полипропиленовые пленочные твердопропитанные конденсаторы с
удельной массой 0,1 — 0,2 кг/кВАр, современные устройства бесконтактного
управления емкостью с использованием силовых быстродействующих
полупроводниковых ключей, а также достижения в развитии
микроэлектроники, применяемой в системах управления и контроля,
практически снимают ограничения по использованию асинхронных
генераторов в автономных системах электроснабжения, выполненных на базе
высокоскоростных приводных двигателей [11, 39, 42, 43]. При частотах
вращения 18000-24000 об/мин асинхронные генераторы с конденсаторным
возбуждением, работающие на непосредственный преобразователь частоты,
имеют лучшие массогабаритные и энергетические показатели, чем СГ [26, 33,
34, 44]. Однако асинхронные генераторы практически лишаются основных
достоинств, по сравнению с СГ при использовании в генераторном режиме
21
асинхронных двигателей (АД) промышленного исполнения - такие машины
имеют низкий КПД, относительно большую массу и габариты. При работе в
генераторном режиме им свойственны крутопадающие внешние
характеристики [27, 34]. Поэтому, необходимо специально проектировать
асинхронную машину для работы в генераторном режиме на высоких частотах
вращения ротора.
Среди бесконтактных СГ большое распространение получили машины с
вращающимся выпрямителем, реализованные в широком диапазоне мощностей
от 1 до 106кВт. При этом они имеют удельную массу 3,6 - 18 кг/кВт в
зависимости от установленной мощности, а КПД находится в пределах от 32 до
95 %. Наиболее компактные СГ с вращающимися выпрямителями разработаны
и внедрены для авиационных систем энергоснабжения. При мощностях- 30 -
120 кВА и частотах вращения 6000 - 9000 об/мин они имеют удельную массу
0,72 - 1,26 кг/кВА [27, 34, 39, 42].
В качестве возбудителя для СГ с вращающимися выпрямителями можно
использовать вращающийся трансформатор, асинхронный и синхронный
возбудители [34].
Высокие массогабаритные и энергетические показатели имеют
бесщеточные совмещенные многофункциональные возбудители СГ для
дизельных электростанций и гидрогенераторов малых гидроэлектростанций.
Совмещенный возбудитель выполнен как отдельная электрическая машина и
состоит из синхронного возбудителя, асинхронного и индукторного
подвозбудителей, нетрадиционно совмещенных в одной магнитной системе
[33]. Данная конструкция обеспечивает эффективное управление током
возбуждения во всех режимах работы АСЭ [34, 45, 46].
Системы возбуждения генераторов автономных энергетических систем
должны характеризоваться: полной автономностью - начальное возбуждение
обеспечивается исключительно за счет внутренних источников; простотой и
эффективностью схемотехнических и конструкторских решений,
обеспечивающих высокую надежность и хорошие массогабаритные показатели;
22
техническими характеристиками, удовлетворяющими самым жестким
нормативно-техническим требованиям.
1.2. Методы исследования автономных систем электроснабжения
Изучение переходных процессов в АСГ автономных электрических
системах преследует следующие цели [28, 29, 31]:
-определение влияния законов управления на показатели переходного
процесса и выбор оптимальных законов;
— определение влияния параметров генератора на показатели переходного
процесса;
-установление связи между параметрами управляемого генератора и
выбором законов управления.
Управляемые генераторы работают в широком диапазоне изменения
частоты вращения и напряжения, поэтому переходные процессы в них связаны
не только с процессами включения и отключения нагрузки, внезапного
короткого замыкания, но и с процессами изменения частоты вращения и
напряжения. При этом ряд показателей переходного процесса, такие как
минимальное и максимальное напряжения обмотки возбуждения, время
переходного процесса во многих автономных системах задаются при
разработке генератора [28, 29, 47].
Особенностями исследований переходного процесса является постановка
технической задачи, специфика параметров и их внутренних связей, а также
большое количество степеней свободы, и отсюда очень высокий порядок
дифференциальных уравнений, описывающих исследуемые процессы.
Очевидно, что оперировать было бы крайне неудобно такими уравнениями,
причём затраты времени на подготовку программы расчета и на расчет велики.
Поэтому возникает необходимость упрощения задачи и нахождения различных
частных решений [28, 29, 30, 48, 49, 50].
23
Составление дифференциальных уравнений может быть проведено
различными путями. В настоящее время наибольшее распространение
получили уравнения Парка - Горева. С их помощью можно получить
уравнения, не содержащие периодических коэффициентов, поэтому их считают
более простыми при решении. В этой теории все магнитные потоки,
пронизывающие обмотки машины, принимаются состоящими из двух
независимых составляющих: продольной и поперечной; при этом ЭДС,
напряжения, токи также рассматриваются как состоящие из двух составляющих
[51,52].
При выводе уравнений машину считают идеализированной, что
характеризуется [35, 51, 52]:
- отсутствием насыщения магнитной цепи, гистерезиса и потерь в стали;
- отсутствием вытеснения тока в меди обмоток;
- синусоидальным распределением в пространстве кривых МДС и
магнитных индукций;
- независимостью индуктивных сопротивлений рассеяния обмоток
электрических машин от положения ротора;
- полной симметрией обмоток статора машин переменного тока.
Пренебрежение насыщением магнитной цепи и потерями стали,
позволяет пользоваться линейной зависимостью между потоками и МДС.
Результирующий поток нескольких контуров в этом случае можно определить
сложением МДС контуров и нахождением потоков, созданных каждой МДС в
отдельности. При отсутствии потерь в стали, потоки совпадают по фазе с
создающими их МДС и токами. Пренебрежение высшими гармоническими
составляющими потока облегчает математическое исследование электрических
машин [36, 52].
Принятые допущения позволяют рассматривать электрическую машину
как определенное сочетание магнитосвязанных электрических контуров
(обмотка ротора, фазные обмотки статора, демпферные обмотки) и на основе
24
такого представления получить соотношения, определяющие ЭДС,
напряжения, моменты и мощности в любом режиме машины [36, 52].
Опыт показывает, что исследования переходных процессов, выполненные
на основе идеализированной машины, дают результаты, достаточно хорошо
совпадающие с результатами экспериментов, а это позволяет использовать их
для практических целей [51, 53].
При приведении машины к двухфазной оси ее обмоток взаимно
перпендикулярны, что дает возможность не учитывать взаимоиндукцию между
ними и позволяет уменьшить число уравнений, описывающих переходные
процессы. Кроме того, особенно важно то, что уравнения переходного процесса
упрощаются: они не содержат периодически меняющихся коэффициентов,
неизбежно появляющихся при записи уравнений в фазных величинах [51].
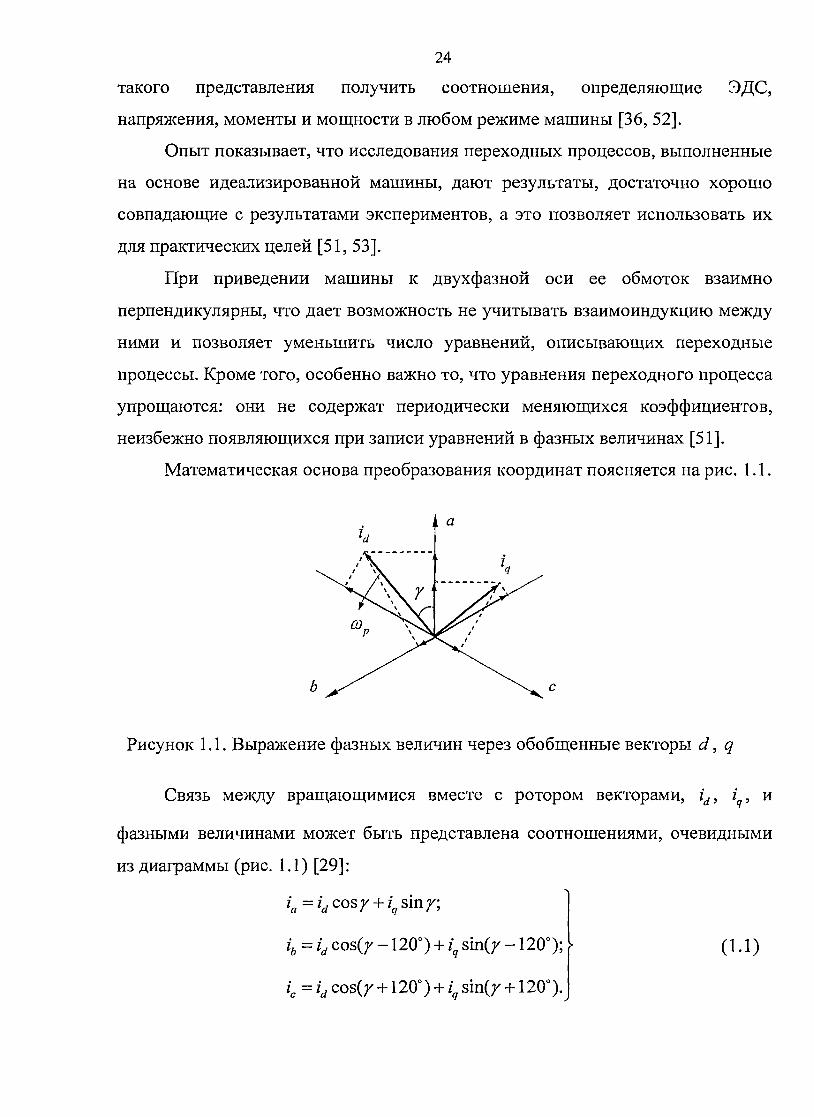
Математическая основа преобразования координат поясняется на рис. 1.1.
Рисунок 1.1. Выражение фазных величин через обобщенные векторы d, q
Связь между вращающимися вместе с ротором векторами, id, iq, и
фазными величинами может быть представлена соотношениями, очевидными
из диаграммы (рис. 1.1) [29]:
ia=idcosy + iqsmr,
Ч=^со<Г-l20°) + iqsin(y-120°); ]> (1.1)
/ c=^cos(r + 120°) + /gsin(/ + 120°).
25
Соотношения для напряжений и потокосцеплений легко получить,
заменив в (1.1) / на U или соответственно на у/. Токи нулевой
последовательности не отражены в (1.1). Протекая в каждой фазной обмотке,
они не участвуют в создании вращающегося поля машины: их действие может
быть учтено появлением в правой части (1.1) величины /0 (или соответственно
е0 и у/0 в уравнениях напряжений и потокосцеплений). Из уравнений (1.1)
легко получить формулы перехода от координат а, Ъ, с к координатам d, q.
Для этого решим систему уравнений (1.1) относительно id, i .
Формулы перехода от фазных величин к двухфазной системе координат
d, q имеет вид [29]:
id = —[z'a cos/ + ib cos(y -120°) + ic cos{y +120°)];
iq = | [ i e siny + ib sin(r -120°) + ic sm{y +120°)];
h^-Va+h+h)-
(1.2)
Равенства (1.1) и (1.2) устанавливают прямую и обратную связь между
действительными токами в обмотках фаз статора и новыми переменными в
осях d, q. Аналогично записываются выражения для напряжения и
потокосцеплений статорной обмотки [29].
Переменные синусоидальные фазные величины ia, ib, ic при переходе к
новой «двухфазной» системе координат, вращающейся вместе с ротором,
изображаются постоянными величинами.
Выбор положительного направления осей ротора, обмоток, направления
тока и направлений наводимых ЭДС определяет знаки отдельных членов
уравнения Парка - Горева.
Уравнения машины обычно записывают в специальной системе
относительных единиц, а вместо индуктивностей подставляют в уравнения
индуктивные сопротивления. Синхронная машина, таким образом содержит два
контура на статоре и один на роторе, а АСГ - два на статоре и два на роторе.
26
Уравнения СГ в системе относительных единиц для симметричных режимов
записываются следующим образом [29]:
dt ч dt
dt dt U4 Yd ,, M V' (1.3)
1 dt /f'
где Ud,Uq - составляющие напряжения на шинах;
Uf - напряжение, приложенное к обмотке возбуждения;
y/ffd — полное потокосцепление обмотки возбуждения;
r,rf- активные сопротивления обмоток статора и возбуждения;
id,iq,if — проекции токов статорной цепи и обмотки возбуждения;
у — угол между осью d и некоторой заданной осью отчета.
В системе относительных единиц потокосцепление каждой обмотки
записываются как произведение токов на соответствующие реактивные
сопротивления самоиндукции и взаимоиндукции [29].
y/d = ifXfd + ildxld + idxd;
(1-4)
где xd - индуктивное сопротивление по продольной оси; xq - индуктивное
сопротивление по поперечной оси; xafd — индуктивное сопротивление
взаимоиндукции между контурами статора и ротора; xald, xalq — сопротивления
взаимоиндукции магнитной связи между статором и успокоительной обмоткой
по продольной и поперечной оси.
Эти выражения устанавливают связь между потокосцеплениями и
токами, протекающими по всем обмоткам.
Уравнения АСГ в системе координат, вращающейся в пространстве с
произвольной частотой сок, записываются в виде [2]:
27
-UА = иг + —т^ - a>ky/q; dt
dm
~ U ^ + dt •<»kWd\
Udf=idfrj +
U, = L,r, 4 4f ~ Wf
dy/f
(1.5)
(1.6)
Wd ~Xld + Xqflfd>
y/q=xiq+xafifq;
W fd ~ Xafld + Xflfd>
Vfq ~Xaflq +Xflfq>
do M = J-^~ + *Л*А " ¥/Л
где x,xf,xaf - полное сопротивление обмоток статора, ротора и взаимная'
индуктивность соответственно; J - постоянная инерции вращающихся частей
генератора; М — вращающий момент приводного двигателя.
Очень часто частота а>к принимается постоянной и равной некоторой
базисной о)к = со0 = 1,0.
Система уравнений (1.3) и (1.4) принимаются за исходные при
проведении дальнейших исследований. Эти уравнения совместно с
уравнениями нагрузки позволяют решать задачи переходных процессов. При
этом необходимо отметить следующее: в автономных системах, исследуемых в
настоящей работе, наиболее характерными являются переходные процессы при
переменной частоте вращения ротора либо при заданном законе изменения
частоты вращения ротора.
Вращающий момент, приложенный к валу генератора, должен
уравновешивать момент, связанный с электрической мощностью, отдаваемой в
переходном процессе в сеть и расходуемой на покрытие потерь в статоре;
28
dWCT появление мощности — — может вызвать дополнительный вращающий
dt
момент, тормозящий или ускоряющий ротор. Например, при коротком
замыкании взаимодействие апериодической составляющей тока статора и
периодической составляющей тока ротора приводит к торможению ротора, а
при отключении короткого замыкания - к ускорению.
Поскольку оба витка жестко связаны, то момент, действующий в модели
машины, равен [36]: M = Md+Mq=idy/q-iqy/d. (1.7)
Мощность на шинах машины вычисляется [36]:
/ \ dW dW P = {^q-Wq)c»p+^-APCT=-Map+^-APCT. (1.8)
i о , dd
* Здесь со = й)0 н скорость ротора, учитывающие скорость изменения
dt
угла поворота ротора; т о
Мсо =Мсо0+М— - электромагнитная мощность генератора, dt
передаваемая с ротора на статор;
dWCT
— — дополнительная мощность, появляющаяся за счет изменения dt
электромагнитной энергии, запасенной в индуктивности цепей статора [36]:
i^^ffeH^ + 2 / o M ; (1.9) dt dt dt dt
^ст ~ (za + Z* + zc ) r ~ потери в активном сопротивлении обмоток статора.
Уравнение относительного движения ротора с учетом выше изложенного
запишется следующим образом [36]:
(1.10) d2S _Tdco_
J df2 J d f
P + AP cm dt , dS con+ —
0 dt
где Tj — постоянная, характеризующая механическую инерцию машины;
29
Ммсх — механический момент привода.
Соотношения (1.8), (1.10) справедливы при любых переходных
электромеханических процессах, в том числе и при асинхронном ходе
синхронного генератора [28, 36].
1.2.1. Выбор математического пакета
Стремление повысить надежность электрических сетей и средств
управления ими устанавливает более высокие требования к точности
моделирования аварийных режимов и вызывает необходимость
совершенствования технических средств вычислений.
Современные компьютерные системы позволяют реализовать достаточно
совершенные алгоритмы вычислений, а точность моделирования процессов в
этих условиях во многом определяется точностью и достоверностью исходных
данных, основу которых составляют параметры моделей электрических сетей.
Разработка и внедрение различных технологических комплексов требует
всестороннего анализа. Моделирование, как известно, является основным
инструментом для принятия своевременных и обоснованных решений.
Представленные выше уравнения генераторов являются нелинейными,
поэтому для их решения целесообразно использовать численный метод
решения. Сложность математического описания процессов в объектах
автономной энергетики требует или создания специальных прикладных
программ, или использования уже существующих универсальных программных
средств (пакетов). Поскольку создание специальных прикладных программ по
исследованию АСЭ требует значительных затрат времени и высокой
квалификации программиста, более приемлемым вариантом является
применение универсальных программных пакетов.
Существуют несколько программных продуктов, которые позволяют
составлять схемотехническое моделирование электротехнического объекта,
сокращая при этом время моделирования.
Приведем краткую характеристику программ.
30
APLAC 7.0 - предназначена для проектирования и моделирования
электрических схем и систем во временной и частотной областях.
Выполняются следующие виды расчетов: режим по постоянному току, частные
характеристики, спектральная плотность и коэффициент шума,
чувствительность и параметрическая оптимизация, переходные процессы,
спектры сигналов, анализ периодических режимов, статический анализ по
методу Монте-Карло. Аналогичные расчеты проводятся обычно с помощью
нескольких разных программ, а все перечисленные расчеты доступны в одной.
Другая важная особенность APLAC 7.0 - наличие большого набора библиотек
элементов принципиальных схем и отдельных блоков, применяемых в
аналоговых и цифровых системах связи.
DesignLab 8.0 - интегрированный программный комплекс корпорации
MicroSim для сквозного проектирования аналоговых, цифровых и смешанных
аналогово-цифровых устройств, синтеза устройств программируемой логики и
аналоговых фильтров. Проектирование начинается с ввода принципиальной
формы, ее моделирования и оптимизации и заканчивается созданием
управляющих файлов в формате JEDEC для программаторов, разработкой
печатной платы и выводом управляющих файлов для фотоплоттеров и
сверлильных станков. В системе используется широко известная программа
моделирования PSpice.
Electronic Workbench 5.0 - представляет собой виртуальную
лабораторию с достаточно широкими возможностями, которая содержит
достаточно обширную библиотеку различных электронных компонентов. На
экране изображаются измерительные приборы с органами управления,
максимально приближенными к реальности. Пользователь освобождается от
изучения довольно абстрактных (хотя и не очень сложных) правил составления
заданий на моделирование. Позволяет анализировать переходные процессы,
пересчитывать режим по постоянному току, выполнять линеаризацию
нелинейных компонентов и затем проводить расчет характеристик схемы в
расчетной области.
31
MatLab 7 - является элитной системой компьютерной математики,
позволяющей инженерам и ученым легко и быстро реализовывать свои идеи и
получать практические результаты. Один из самых мощных и эффективных
инструментов для создания разнообразных программных комплексов,
предназначенных для решения научно-технических задач. Одним из самых
важных и по достоинству оцененных качеств системы MatLab является
возможность ее модификации с целью решения все новых и новых научно-
технических задач, которые в изобилии появляются благодаря прогрессу в
науке, технике и образовании. Это достигается, прежде всего, созданием целого
ряда пакетов расширения системы, охватывающих многие новые и практически
полезные направления компьютерной математики. Пакет Simulink, созданный
на основе системы MatLab, предоставляет самые различные возможности,
начиная от структурного (математического) представления системы и
заканчивая генерированием кодов для программирования микропроцессора в
соответствии со структурной схемой модели. В нем реализованы принципы
визуально-ориентированного программирования, что позволяет легко набирать
нужные блоки и соединять их с целью составления модели анализируемой
системы или устройства. При этом сложнейшие уравнения состояния,
описывающие работу моделей, формируются автоматически. По удобству
графического пользовательского интерфейса, обилию моделей (блоков)
компонентов во множестве библиотек, разнообразию виртуальных средств
регистрации и визуализации результатов моделирования и, главное, по их
надежности и достоверности Simulink выгодно отличается от множества других
программ подобного назначения [54, 55, 56, 57].
MicroCap 7.0 - предназначена для моделирования аналоговых, цифровых
и аналогово-цифровых устройств. Система содержит многостраничный
графический редактор принципиальных схем, способна выполнять
поведенческое моделирование аналоговых и цифровых компонентов, дает
возможность описания цифровых компонентов с помощью логических
выражений. В сочетании с библиотекой графических символов типовых
32
операций позволяет моделировать динамические системы, заданные не только
принципиальными, но функциональными схемами. MicroCap содержит
большую библиотеку компонентов. Системой выполняется многовариантный
анализ при вариации параметров и статический анализ по методу Монте-Карло.
Кроме того, имеется специальная программа MODEL для расчета параметров
математических моделей аналоговых компонентов по справочным или
экспериментальным данным.
OrCAD 10.0 - объединяет в себе возможности анализа, синтеза, расчета и
конструирования электронных схем и обладающий к тому же очень обширной
библиотекой электронных компонентов. Позволяет проводить анализ
электронных блоков, осуществлять проектирование печатных плат для
разработанной и исследованной электронной схемы, позволяет синтезировать
программируемые логические интегральные схемы.
Использование любого программного обеспечения подразумевает
соблюдение определенного алгоритма выполнения задачи. В любом пакете
схемотехнического моделирования требуется выбрать электронные
компоненты и соединить их согласно принципиальной схеме исследуемой
установки, то есть создать условия для начала моделирования. После
составления схемы появляется возможность исследовать поведение схемы
вложенными в пакете математическими методами. Каждый пакет
предусматривает определенную стратегию исследования особенностей
функционирования системы во времени при различных параметрах, как самой
системы, так и внешней среды.
Для исследования в штатных режимах во всех пакетах требуется создать
схему, состоящую из элементов, имеющихся в библиотеке компонентов, задать
параметры для расчета и провести необходимый анализ. Для исследования
поведения системы в нештатных режимах необходимы элементы, позволяющие
имитировать короткие замыкания и обрывы элементов схемы.
На основании вышеизложенного описания различных программных
продуктов, и многочисленных публикаций для построения математической
33
модели электротехнического объекта, была выбрана система MatLab 7, в состав
которой входит пакет визуального моделирования Simulink. В отличие от
других пакетов схемотехнического моделирования, где приходится создавать
свою модель, используя специальный язык моделирования, пакет MatLab 7 с
высокой степенью точности позволяет моделировать электрические системы, а
также достаточно просто создавать собственные блоки элементов и субмодели
[55].
1.3. Общие принципы управления асинхронизированным
синхронным генератором
В современной теории и практике АСГ к управлению Uf предъявляются
весьма большие требования. Прежде всего, управление должно обеспечивать
все заданное множество рабочих режимов, статическую устойчивость этих
режимов, динамическую устойчивость при нормативных возмущениях во
внешней сети, а также качество переходных процессов согласно заданному или.
принятому критерию качества. Поскольку в АСГ имеется как минимум две
обмотки на роторе, то это дает возможность управлять не только величиной, но
и фазой вектора напряжения ротора или его составляющими, а следовательно,
управлять двумя переменными, определяемыми некоторым вектором.
Требуется, чтобы функция регулирования допускала раздельное управление
составляющими (проекциями) вектора возбуждения, т.е. при воздействии,
изменяющее одну составляющую, другая оставалась бы неизменной. Наконец,
необходимо, чтобы функция регулирования допускала такую структурную
реализацию, при которой осуществлялась симметрирование параллельных
каналов и, следовательно, обеспечивалось качество действующей в сети
электроэнергии, отвечающее стандарту [20, 58, 59]. Для построения функций
регулирования используются различные методы синтеза. При этом под
синтезом функций регулирования понимается некоторый формализованный
процесс построения функций Uf как явных функций тех или иных
34
переменных, описывающих поведение АСГ, и отбора тех из них, которые
удовлетворяют перечисленным выше требованиям.
Методы синтеза отличаются по исходным принципам, положенным в их
основу. Существуют методы синтеза, в основе которых лежат критерии
статической устойчивости (скажем, критерий Гурвица), критерий качества
переходных процессов. Наиболее развитыми в настоящее время являются
методы синтеза, базирующиеся на принципах подчиненного регулирования, а
также теории инвариантности [20, 60].
Анализ общих принципов управления может быть выполнен на основе
уравнений генератора без демпферных контуров на роторе, записанных для
установившегося режима [50]:
-U = r7 + j{xI+xafIf); (1.Ц)
^/ = r/f ~ Мх/Ь + ха/)- (1.12)
Если пренебречь потерями в статорнои цепи (т.е. принять г = 0), из
уравнения (1.11) в проекциях на оси синхронной системы координат у, х
(ось у совпадает с направлением U) получаем [50]:
и = х1х + ха/1^; Л г г (1-13)
Электромагнитный момент Мэ, выраженный в относительных единицах,
равен электромагнитной мощности, которая при неучете потерь в статорнои
цепи равна активной мощности на выводах генератора:
Мэ = Р = Шу. (1.14)
Аналогично для реактивной мощности имеем
Q = ~UIX. (1.15)
Важным достоинством является то, что электрическая машина может
работать в режиме генерации и потребления активной и реактивной мощности
при всех частотах вращения ротора (ниже, выше и равной синхронной).
35
Тогда из (1.13) можно получить выражения для Мэ и Q в следующем
виде [50]:
Ux I" П* ( Ы б )
Q- °f & U
X X
где U - напряжение на выводах обмотки статора; х — синхронное реактивное
сопротивление машины.
Из соотношений (1.16) следует, что воздействуя определенным образом
на синхронные проекции Ify и Ifi тока ротора, в установившихся режимах
можно независимо управлять, с одной стороны, электромагнитным моментом и
движением ротора и, с другой стороны, режимом управления по реактивной
мощности [50].
Соотношения (1.11) - (1.16) справедливы в равной степени для
синхронных и для АС - генераторов. Однако в синхронном генераторе
проекции Ify и /д не могут регулироваться независимо, т.к. связаны с током
обмотки возбуждения и углом нагрузки, в соотношениями:
I^=-Ifs'm9; (1.17)
где единственной независимой управляемой величиной является If\ в —
временной угол между векторами напряжения ЭДС.
В АСГ, который имеет на роторе систему обмоток с несовпадающими
осями, появляется возможность регулирования нескольких пространственных
составляющих МДС возбуждения. Таким образом, в АСГ появляется
дополнительная степень свободы управления, что используется для
раздельного управления электромагнитным моментом и реактивной
мощностью [50].
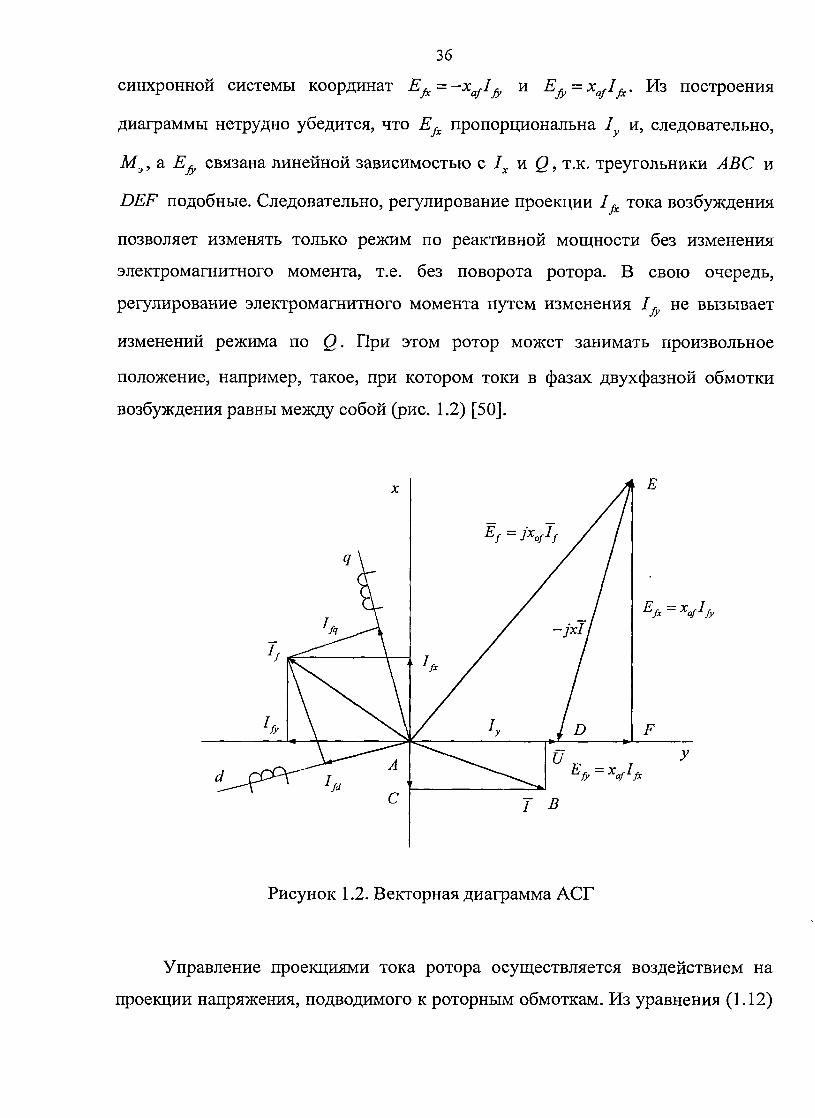
На рис. 1.2 изображена векторная диаграмма генератора на которой
вектор ЭДС возбуждения Ej = -jxafIf разложен на составляющие по осям
36
синхронной системы координат Ejx = -xafIfy и Е^=ха/1^. Из построения
диаграммы нетрудно убедится, что Efa пропорциональна / и, следовательно,
Мэ, a Efy связана линейной зависимостью с 1Х и Q, т.к. треугольники ABC и
DEF подобные. Следовательно, регулирование проекции Ifx тока возбуждения
позволяет изменять только режим по реактивной мощности без изменения
электромагнитного момента, т.е. без поворота ротора. В свою очередь,
регулирование электромагнитного момента путем изменения Ify не вызывает
изменений режима по Q. При этом ротор может занимать произвольное
положение, например, такое, при котором токи в фазах двухфазной обмотки
возбуждения равны между собой (рис. 1.2) [50].
Рисунок 1.2. Векторная диаграмма АСГ
Управление проекциями тока ротора осуществляется воздействием на
проекции напряжения, подводимого к роторным обмоткам. Из уравнения (1.12)
37
в проекциях на синхронные оси можно получить зависимости между
составляющими напряжений и токов ротора в установившихся режимах [50]:
Jy ~ ' rf
г/
Из зависимостей (1.18) видно, что даже в установившемся режиме токи
ротора пропорциональны напряжениям возбуждения только при синхронной
частоте вращения ротора (при 5 = 0). При s^O появляются перекрестные
связи, выражающиеся в том, что управление одной проекцией тока ротора
оказывает влияние на другую.
Таким образом, принцип управления в АСГ заключается в регулировании
по определенному закону двух ортогональных составляющих напряжения
возбуждения. При регулировании в единых осях в АРВ формируются два
сигнала постоянного тока, соответствующие синхронным проекциям Uf.
Управление АСГ реализуется введением переменного напряжения возбуждения
в фазы обмотки возбуждения, расположенные на роторе, вращающихся с
частотой со , и занимающих в текущий момент времени данное угловое
положение.
Возможность автоматического регулирования ЭДС машины Ef не только
по величине, но и по фазе обеспечивает более высокую устойчивость при
параллельной работе с сетью рассматриваемого устройства, чем у
традиционной синхронной машины с возбуждением по одной оси ротора, ЭДС
которой регулируется только по величине. Это достоинство АСГ особенно
существенно для работы в зоне недовозбуждения, т.е. в зоне потребления из
сети реактивной мощности, в которой уровень устойчивости СМ низок и
ограничивает допустимую величину потребления реактивной мощности [50].
38
1.3.1. Применение нечеткой логики для регулирования системы
возбуждения АСЭ
Приведенная математическая модель АСГ (1.5, 1.6) построена на
предположении ряда допущений и в реальности является неточной. При
анализе сложных технических систем мы имеем дело с неполнотой,
неопределенностью, недетерминированностью исходной информации о
системе, что не дает возможности точно описать систему в рамках
классических математических формализмов, и позволяет только строить
рассуждения, имеющее многозначные интерпретации. В этих условиях
требуется расширение всех основных математических понятий и создание
соответствующего формального аппарата для моделирования [64, 65, 66, 67].
Такой новый математический аппарат был создан Л. А. Заде (L. A. Zadeh,
профессор технических наук Калифорнийского университета) на основе
введения, так называемых лингвистических переменных, описывающих
нечеткое задание информации об объекте [68].
Выделение методов и средств обработки нечеткой информации в
отдельное направление оправдано тем, что они являются базой для построения
всевозможных интеллектуальных программных систем, получивших название
«нечетких систем». Обработка нечеткой информации и нечеткий вывод в
последние годы применяются в различных интеллектуальных системах.
Однако, наиболее широкое распространение нечеткие системы получили в
области управления. К настоящему времени разработаны общие принципы и
основы методологии построения нечетких систем управления. Нечеткий
регулятор позволяет построить достаточно простые (с вычислительной точки
зрения) быстродействующие алгоритмы управления, которые являются обычно
малочувствительными к действию параметрических возмущений и помех [32].
Нечеткая логика уже нашла применение в решении задач идентификации
параметров электрических машин в системах регулирования, системах
управления инверторами напряжения с ШИМ.
39
Разработка систем управления АСГ, способных поддерживать основные
рабочие параметры в заданных пределах, является сложной задачей
многокритериальной оптимизации в условиях непредсказуемо меняющегося
характера нагрузки, а также переменной скорости вращения приводного
устройства. Одним из перспективных решений столь сложной задачи является
внедрение технологии разработки интеллектуальных систем управления на базе
микропроцессорных регуляторов на основе нечеткой логики (Fuzzy-logic
systems). На протяжении последних 15 лет за рубежом ведутся интенсивные
исследования в области применения новых типов адаптивных систем
регулирования, в том числе цифровых регуляторов на основе нечеткой логики
[68, 69, 70, 71, 72, 73, 74, 75, 76].
Одной из главных предпосылок появления теории нечетких множеств
является принцип несовместимости, выдвинутый Л. А. Заде, и утверждающий,
что сложность системы и точность, с которой ее можно проанализировать,
традиционными математическими методами, в первом приближении обратно
пропорциональны [77, 78]. Данный принцип в полной мере относится ко
многим техническим устройствам и системам, в том числе и к системам
автономного адаптивного управления.
Нечеткое управление оказывается особенно полезным в тех случаях,
когда технологические процессы являются сложными для анализа с помощью
общепринятых количественных методов или когда доступные источники
информации интерпретируются качественно, неточно или неопределенно.
Нечеткая логика, на которой основано нечеткое управление, ближе по духу к
человеческому мышлению и естественным языкам, чем традиционные
логические системы. Нечеткая логика, в основном, обеспечивает эффективные
средства отображения неопределенностей и неточностей реального мира.
Математическая теория нечетких множеств позволяет описывать нечеткие
понятия и значения, оперировать этими значениями и делать нечеткие выводы.
Наличие математических средств отражения нечеткости исходной информации
позволяет построить модель, адекватную реальности [79, 80, 81, 82].
40
Типичные системы управления на базе нечетких регуляторов относятся
к классу экспертных систем и представляют собой нелинейные контроллеры
характеристической поверхности. Однако технология разработки таких систем
выгодно отличается от методики расчета классических систем управления тем,
что позволяет не только синтезировать регуляторы в условиях чрезвычайно
сложного или вообще отсутствующего математического описания как самого
объекта, так и задачи управления, но и существенно сократить затраты времени
на разработку системы. Такой подход к задаче регулирования системы
возбуждения электрических машин дает возможность получить значительный
технико-экономический, а также технологический и экологический эффекты.
Автоматическое регулирование возбуждения генераторов,
реализованное на базе нечеткой логики, в последние годы зарекомендовало
себя эффективным средством повышения уровня статической и динамической
устойчивости электроэнергетических систем. В Якутской энергосистеме в
2004 г. введен в эксплуатацию первый гидрогенератор Вилюйской ГЭС-3
(Светлинской ГЭС). В качестве основного регулятора возбуждения этого
генератора применен микропроцессорный регулятор, построенный на
принципах нечеткой логики. В связи с развитием цифровой микропроцессорной
техники становятся перспективны методы нечеткого регулирования, поскольку
фиксированные настройки АРВ генераторов не всегда удовлетворяют всему
возможному многообразию режимов работы и переходных процессов
автономных энергосистем [7].
Нечеткая логика является многозначной логикой. В отличие от
традиционной математики, требующей на каждом шаге моделирования точных
и однозначных формулировок закономерностей, нечеткая логика предлагает
совершенно иной уровень мышления, при котором творческий процесс
моделирования происходит на наивысшем уровне абстракции и постулируется
лишь минимальный набор закономерностей, выраженных в логико-
лингвистической форме, близкой к естественным языкам.
41
Однако кажущаяся упрощенность систем на основе нечеткой логики не
накладывает никаких ограничений на класс решаемых ими задач по сравнению
с традиционной математикой. Это утверждение было доказано Б. Коско
(В. Kosko) в виде теоремы FAT (Fuzzy Approximation Theorem), гласящей, что
любая математическая система может быть аппроксимирована системой
нечеткой логики [82, 83].
Возможность успешного применения подходов, основанных на
нечеткости, во многом определяется гибким математическим аппаратом,
используемым при анализе и обработке данных, способным адекватно отразить
не только не подлежащие строгой формализации зависимости и взаимосвязи,
но и учесть неточные, субъективные оценки специалистов, лежащие в их
основе.
1.3.1.1. Выбор алгоритма нечеткого вывода
Многочисленные этапы нечеткого вывода могут быть реализованы
неоднозначным образом, поскольку включают в себя отдельные параметры,
которые должны быть фиксированы или специфицированы. Тем самым, выбор
конкретных вариантов каждого из этапов определяет некоторый алгоритм,
который в полном объеме реализует нечеткий вывод в системах правил
нечетких продукций. К настоящему времени предложено несколько алгоритмов
нечеткого вывода. Наибольшее применение в системах нечеткого вывода
получили алгоритмы: Мамдани (Mamdani), Цукамото (Tsukamoto), Ларсена
(Larsen), Сугено (Sugeno), упрощенный алгоритм нечеткого вывода [75, 79].
Наиболее известными и популярными являются алгоритмы Мамдани
(Mamdani) и Сугено (Sugeno). Сегодня большинство промышленных
приложений нечеткого управления базируется именно на контроллерах двух
типов: Mamdani или Sugeno [70, 74, 75, 84].
42
На основе сравнительного анализа выбрана среда разработки нейро-
нечеткой системы в пакете Fuzzy Logic Toolbox системы Matlab, которая имеет
следующие преимущества перед другими системами [75]:
• Наличие пакета моделирования нейро-нечетких систем;
• Наличие пакетов расширений, то есть библиотек, содержащих
функции, ориентированные на решение специфических задач;
• Возможность создавать графический пользовательский интерфейс и
web-приложения;
• Наличие пакета статистической обработки данных;
• Возможность взаимодействия с другими языками
программирования и базами данных.
В пакете Fuzzy Logic Toolbox реализованы два типа нечетких моделей —
типа Мамдани и типа Сугено. Эти модели отличаются форматом базы знаний и
процедурой дефаззификации. Кроме этого, в пакете Fuzzy Logic Toolbox
существует возможность автоматизации этапа параметрической идентификации
для моделей типа Сугено.
Рассмотрим данные алгоритмы применительно к задаче аппроксимации
непрерывной функции одной переменной.
Алгоритм Mamdani. Данный алгоритм математически может быть
описан следующим образом [75]:
1. Нечеткость (fuzzification): находятся степени истинности для
предпосылок каждого правила: Аг (х0), А2 (х0), В1 [у0), В2 (_у0).
2. Нечеткий вывод: находятся уровни "отсечения" для предпосылок
каждого из правил (с использованием операции минимум)
<22=ЛОо)ЛЯ2Оо)> 1.19)
где через «л» обозначена операция логического минимума (min), затем
находятся «усеченные» функции принадлежности
43
C1'(z) = (a 1 AC 1 (z ) ) ; (
C'2(Z) = (CC2AC2{Z)). 1.20)
3. Композиция: с использованием операции максимум (max, далее
обозначаемой как «v») производится объединение найденных усеченных
функций, что приводит к получению итогового нечеткого подмножества для
переменной выхода с функцией принадлежности
MT{Z) = C(z) = q(z)vC2(z) = (alACl(z))v(a2AC2(z)). ^ (
4. Приведение к четкости (defuzzification для нахождения z0) обычно
проводится центроидным методом.
Алгоритм Sugeno. Sugeno и Takagi использовали набор правил в
следующей форме на примере двух правил [75]:
Пх: если х есть Ахи у есть Вх, тогда zx = ахх + Ьху;
П2: если х есть А2и у есть В2, тогда z2 = а2х + Ъ2у.
Представление алгоритма
1. Первый этап — нечеткость: находятся степени истинности для
предпосылок каждого правила: Д(х0), A2{XQ), Bx(yQ), В2(у0).
2. На втором этапе находятся уровни «отсечения» для предпосылок
каждого из правил, ах = Ax{xQ)лВх(уй), а2 = А2(х0)лВ2(у0) и индивидуальные
выходы правил:
z*2 = a2xQ + b2y0. 1.22)
3. На третьем этапе определяется четкое значение переменной вывода:
a,z,* +a7zl
^ o = - U —• (1.23) ах +а2
Предполагаем, что идентифицируемая нелинейная зависимость
представлена выборкой данных «входы-выход»: (Хг,уг), г = Т,М, (1.24)
44
где Xr ={xrl,xr2,...,xrn^ - вектор входов и уг - выход в г паре; М - объем
выборки.
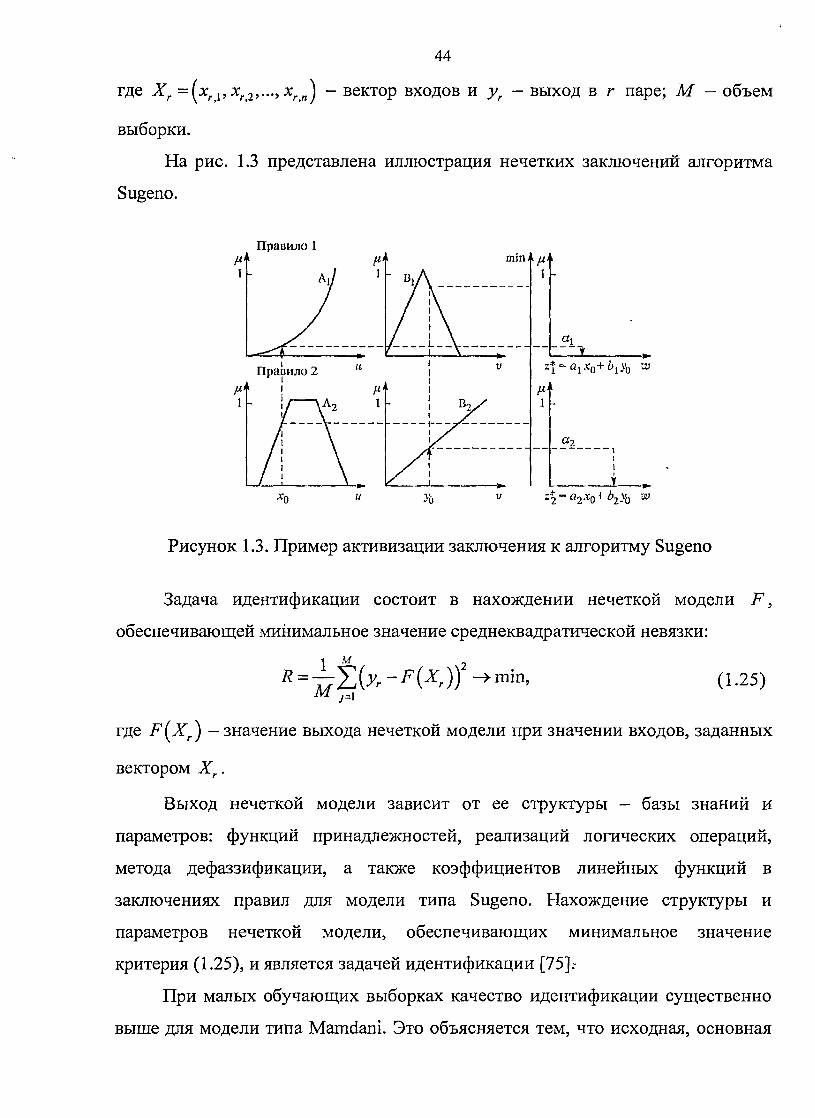
На рис. 1.3 представлена иллюстрация нечетких заключений алгоритма
Sugeno.
1 ft, 1 min:
• у\
А 1 i \ . --
Правило 2 и ! v
i pf ! \/ \Л2 1 - ! ^г/
—L—1 i-»- с j »-
z
i
,
<h " * »
« 2 1 1 1
*o « y0
u r2~ f l2-V Vvo да
Рисунок 1.3. Пример активизации заключения к алгоритму Sugeno
Задача идентификации состоит в нахождении нечеткой модели F,
обеспечивающей минимальное значение среднеквадратической невязки:
К = ~^11УГ-Р{ХГ)) ->min, (1.25)
где F(Xr) - значение выхода нечеткой модели при значении входов, заданных
вектором Хг.
Выход нечеткой модели зависит от ее структуры - базы знаний и
параметров: функций принадлежностей, реализаций логических операций,
метода дефаззификации, а также коэффициентов линейных функций в
заключениях правил для модели типа Sugeno. Нахождение структуры и
параметров нечеткой модели, обеспечивающих минимальное значение
критерия (1.25), и является задачей идентификации [75].-
При малых обучающих выборках качество идентификации существенно
выше для модели типа Mamdani. Это объясняется тем, что исходная, основная
45
на экспертных высказываниях, нечеткая модель уже отражает основные
особенности индетифицируемой зависимости. С увеличением объема
обучающей выборки лучшее качество идентификации обеспечивает модель
типа Sugeno. При больших выборках точность идентификации модели типа
Sugeno выше, чем для модели типа Mamdani. Поэтому для задач, где более
важна точность идентификации, целесообразно использовать алгоритм
нечеткого вывода типа Sugeno. В связи с высокими требованиями,
предъявляемыми к системе АРВ генераторов в частности к точности, и на
основании многочисленных публикаций выбран алгоритм нечеткого вывода
типа Sugeno, для построения системы автоматического регулирования.
1.4. Состояние вопроса и постановка задачи исследования
Одной из особенностей работы электрооборудования автономного
объекта может являться ограниченность мощности источника питания. Нередко
мощность источников питания автономных объектов ограничена и соизмерима
с мощностью потребителей. Вследствие этого, с одной стороны, происходит
влияние режимов работы электрооборудования на характер изменения
значений выходных (энергетических) координат источника питания, с другой
стороны, происходит ухудшение качества функционирования электроприводов,
получающих энергию от данного источника питания. Если от общего
источника питания получают энергию ряд потребителей, то вследствие
указанных факторов может возникнуть взаимосвязь между процессами в
различных системах через общий источник питания.
Недостаточная изученность автономных систем электроснабжения на
базе АСГ с системой автоматического регулирования возбуждения на базе
нечеткой логики для повышения технико-экономических показателей
автономных систем, вызывает необходимость решения следующих задач:
1. Создание математической модели асинхронизированного синхронного
генератора и расчет его статических характеристик при автономной работе.
46
2. Исследование переходных процессов АСГ посредствам
математического моделирования.
3. Разработка системы регулирования тока возбуждения АСГ,
обеспечивающей необходимые показатели качества электроэнергии.
4. Создание комплекса программ для исследования автономной системы
электроснабжения.
5. Экспериментальное исследование АСГ с использованием пакета
LabView для проверки адекватности полученных теоретических результатов.
47
ГЛАВА2
ИССЛЕДОВАНИЕ ЭЛЕКТРОМАШИННЫХ СИСТЕМ
В АВТОНОМНОЙ СИСТЕМЕ ЭЛЕКТРОСНАБЖЕНИЯ С
ВОЗБУЖДЕНИЕМ ПЕРЕМЕННЫМ ТОКОМ
2.1. Система относительных единиц. Приведение параметров
вторичной обмотки к первичной
В теории установившихся, и в особенности переходных процессов
электрических машин, широко используют относительные единицы (о.е.). При
анализе различных режимов работы АСГ удобно пользоваться относительными
единицами, применение которых имеет ряд преимуществ [35, 36, 51]:
1) система уравнений электрической машины имеет более простой вид;
2) расчеты ведутся с числами, близкими к единице, что особенно важно
при использовании ПЭВМ;
3) облегчается контроль за правильностью расчета;
4) упрощаются сравнения поведений электрических машин в различных
режимах работы, сравнение машин различных мощностей и типов;
5) многие различные по своей сути физические величины выражаются
одним и тем же числом.
Применение системы относительных единиц заключается в том, что
вместо действительных значений величин оперируют их относительными
значениями, выраженными в долях некоторых основных значений, принятых в
качестве базисных.
Для АСГ примем следующие базисные величины:
1.3а базисную частоту принимается угловая частота ( / ,=50 Гц -
номинальная частота)
co6=2nfH. (2.1)
48
2. За базисное напряжение статора, ЭДС и тока принимаются амплитуды
соответствующих фазных величин статорной обмотки
U б~ *^б~ Um.HOM> *б = *т.ном- (2-2)
3. Базисное полное сопротивление
ив z6=~r- (2.3)
4. Базисное индуктивное сопротивление
5. Потокосцепление статора у/6 — за базисное потокосцепление статора
принимаем потокосцепление, индуктирующее в обмотке статора при базисной
угловой частоте базисное напряжение
Уб=—- (2.5)
6. За базисную механическую скорость вращения ротора примем скорость
при частоте питания вторичной обмотки равной нулю
&гб=— • (2.6)
Р
7. За базисную единицу времени принимается время, в течение которого
вращающийся ротор повернется на один электрический радиан
, 1 1 / e = ~ = T~F- (2-7)
8. За базисную единицу мощности принимаем мощность, создаваемую
базисным напряжением и током статора
Рб=3иб1б. (2.8)
9. За базисную единицу момента примем момент, создающий базисную
мощность при базисной скорости вращения
М6=-7Г- (2-9)
49
10. За базисную единицу инерции примем
Р. J, в «=-^ГПГ' (2Л0)
а>, б/пр
Принятая система относительных единиц предназначена для
оперирования с параметрами первичной обмотки АСГ. Для того, чтобы ею
можно было оперировать и с параметрами вторичной обмотки, необходимо
вторичную обмотку привести к первичной. Приведение заключается в том, что
вторичную обмотку пересчитываем на число фаз и число витков первичной
обмотки, при этом энергетические соотношения в АСГ остаются без
изменений.
Чтобы вторичную обмотку АСГ привести к первичной, необходимо
определить коэффициенты приведения токов тп напряжений ти,
сопротивлений т. кЭДС,те [52, 85, 86].
Приведенная величина или параметр обозначен тем же символом, что и
неприведенная, но с верхним индексом «штрих».
Коэффициенты приведения ЭДС представляет собой отношение ЭДС
первичной обмотки, наведенной основной гармоникой потока к ЭДС вторичной
обмотки, наведенной этим же потоком при неподвижном роторе.
Выполним приведение роторных величин к обмотке статора.
В электрической машине и статор, и ротор трехфазные т1 = т2.
Амплитуды гармонических составляющих:
*'am = 1фа™аК:об.а '»
жр
г (2.11) Ffin= hfWfko6.f
J Tip H J
где Fam, Fr — амплитуда МДС статора и возбуждения; m — число фаз обмотки;
р— число периодов поля; 1фа,1ф/ — фазный ток статора и возбуждения; wa, wf —
число витков фазы ротора и возбуждения; коба, ko6f— обмоточный коэффициент
фазы ротора и возбуждения, для основной гармонической индукции.
50
Приведенный ток создает ту же МДС, что и реальный:
^т=^=—Гф^акобм, (2.12) J яр
7 / Wfko6.f
т.е. т.. - J - J -h ™аКб.а
Коэффициент приведения напряжений:
и/^и'/'у, mu=j-. (2.13)
Коэффициент приведения сопротивлений.
Активное сопротивление фазы ротора приводится таким образом, чтобы
мощность электрических потерь в обмотке осталась прежней:
mR'f(l'ff = mRfl}=P3/;
R'f^ ml] _m{wako6.a)\mu_m (2.14)
Rf m(l'ff m(wfko6Jf m,
Данные уравнения позволяют привести вторичную обмотку к первичной
для оперирования единой системой относительных единиц.
2.2. Основные модули автономной системы электроснабжения и их
моделирование в пакете Matlab/Simulink
В состав системы Matlab входит пакет моделирования динамических
систем — Simulink. Пакет Simulink является ядром интерактивного программного
комплекса, предназначенного для математического моделирования линейных и
нелинейных динамических систем и устройств, представленных своей
функциональной блок-схемой. При этом возможны различные варианты
моделирования: во временной области, в частотной области, с событийным
управлением, на основе спектральных преобразований Фурье, с
использованием метода Монте-Карло (реакция на воздействия случайного
характера) и т.д. [55].
51
Для построения функциональной блок-схемы моделируемых устройств
Simulink имеет обширную библиотеку блочных компонентов и удобный
редактор блок-схем. Он основан на графическом интерфейсе пользователя и по
существу является типичным средством визуально-ориентированного
программирования [87, 88].
Перед началом моделирования необходимо выполнить установку
параметров моделирования. В окне настроек параметров моделирования
первостепенное значение имеют две опции решателя в поле Solver options: тип
решения и метод решения. Возможны два типа решения [89, 90]:
• Variable-step solvers — решение с переменным шагом;
• Fixed-step solvers - решение с фиксированным шагом.
Важен и такой параметр моделирования, как точность интегрирования:
• Relative tolerance — относительная погрешность интегрирования;
• Absolute tolerance — абсолютная погрешность интегрирования.
Не оптимально выбранные значения погрешности (как очень малые, так и
очень большие) могут вызвать неустойчивость и даже «зацикливание» процесса
моделирования.
Для обеспечения требуемой точности расчета и приемлемых затрат
машинного времени, приняты следующие параметры моделирования:
Solver options: решение с переменным шагом, ode23tb (stifFTR-BDF2);
Max step size: 0,001;
Min step size: auto;
Initial step size: auto;
Relative tolerance: 0,001;
Absolute tolerance: auto.
Результаты моделирования фиксируются с помощью регистрирующих
элементов:
-осциллографы - для наблюдения динамики изменения исследуемых
зависимостей;
52
- дисплей - экраны — для отображения численных значений
исследуемых величин;
— блоки, обеспечивающие сохранение выходных результатов
моделирования.
Применяемые в практических расчетах численные методы
интегрирования дифференциальных уравнений различаются способами
вычисления приращения Ауп, определяющего значение функции в момент tn+l.
В последнее время при расчетах переходных электромеханических процессов
наибольшее распространение получил метод Рунге-Кутта. Метод Рунге-Кутта
обладает высокой точностью за счет уменьшения методической ошибки.
Особенностью этого метода является то, что он не требует информации о
предшествующих шагах интегрирования. Каждый шаг в соответствии с этим
методом делается как бы заново, причем для вычисления значения функции в
точке tn+l используются лишь ее значения в точке tn. Для решения систем
дифференциальных уравнений последний также приводится к нормальному
виду. При этом, уравнения записываются разрешенными относительно
производных, причем число уравнений равно числу неизвестных функций [91].
Расчетную схему автономной системы удобно разделить на ряд
однотипных элементов, описываемых своими наборами дифференциальных и
алгебраических уравнений. Каждый элемент характеризуется набором входных
и выходных параметров, которые полностью описывают всю совокупность
процессов внутри каждого элемента и его влияние на другие элементы
расчетной схемы. Представления элементов схемы в форме полных
дифференциальных уравнений позволяет получить мгновенные значения токов
и напряжений, благодаря чему может быть выполнен всесторонний анализ
исследуемой системы [92].
В расчетной схеме АСЭ можно выделить следующие ее типовые
элементы, соединяемые по заданной структурной схеме:
- асинхронизированный синхронный генератор;
- модель дизельного двигателя;
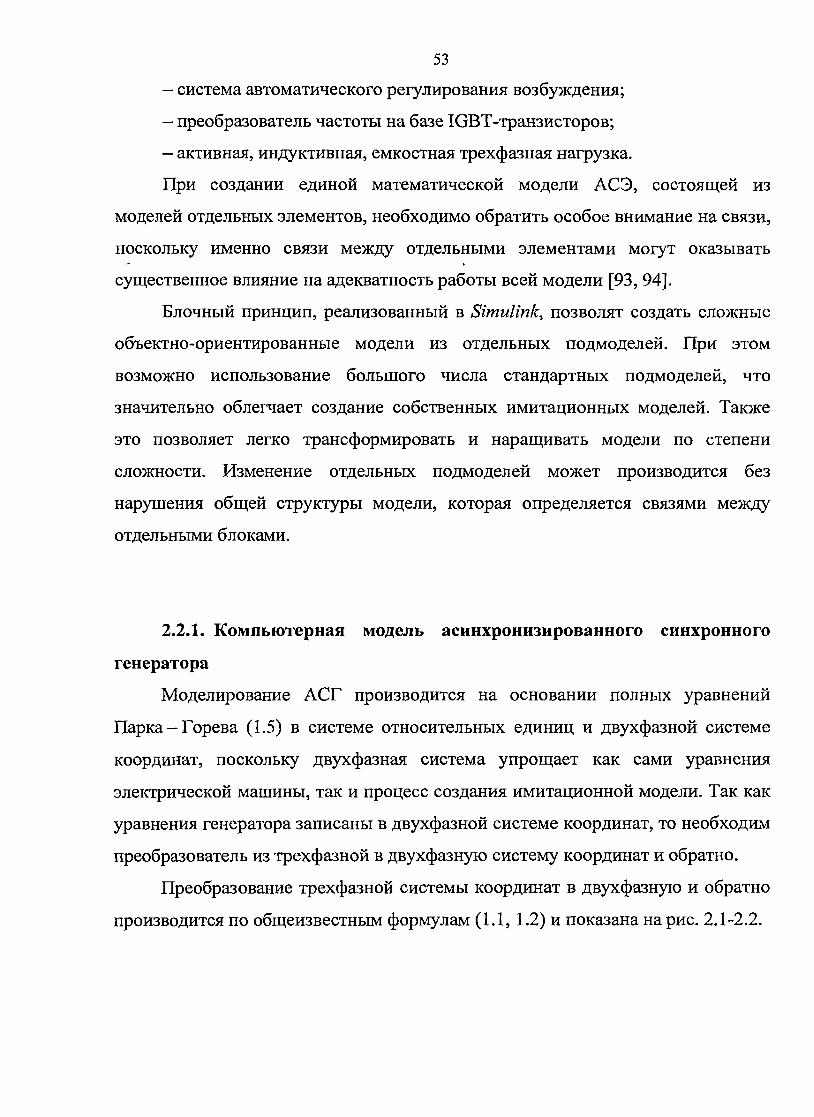
53
- система автоматического регулирования возбуждения;
- преобразователь частоты на базе ЮВТ-транзисторов;
- активная, индуктивная, емкостная трехфазная нагрузка.
При создании единой математической модели АСЭ, состоящей из
моделей отдельных элементов, необходимо обратить особое внимание на связи,
поскольку именно связи между отдельными элементами могут оказывать
существенное влияние на адекватность работы всей модели [93, 94].
Блочный принцип, реализованный в Simulink, позволят создать сложные
объектно-ориентированные модели из отдельных подмоделей. При этом
возможно использование большого числа стандартных подмоделей, что
значительно облегчает создание собственных имитационных моделей. Также
это позволяет легко трансформировать и наращивать модели по степени
сложности. Изменение отдельных подмоделей может производится без
нарушения общей структуры модели, которая определяется связями между
отдельными блоками.
2.2.1. Компьютерная модель асинхронизированного синхронного
генератора
Моделирование ACT производится на основании полных уравнений
Парка —Горева (1.5) в системе относительных единиц и двухфазной системе
координат, поскольку двухфазная система упрощает как сами уравнения
электрической машины, так и процесс создания имитационной модели. Так как
уравнения генератора записаны в двухфазной системе координат, то необходим
преобразователь из трехфазной в двухфазную систему координат и обратно.
Преобразование трехфазной системы координат в двухфазную и обратно
производится по общеизвестным формулам (1.1, 1.2) и показана на рис. 2.1-2.2.
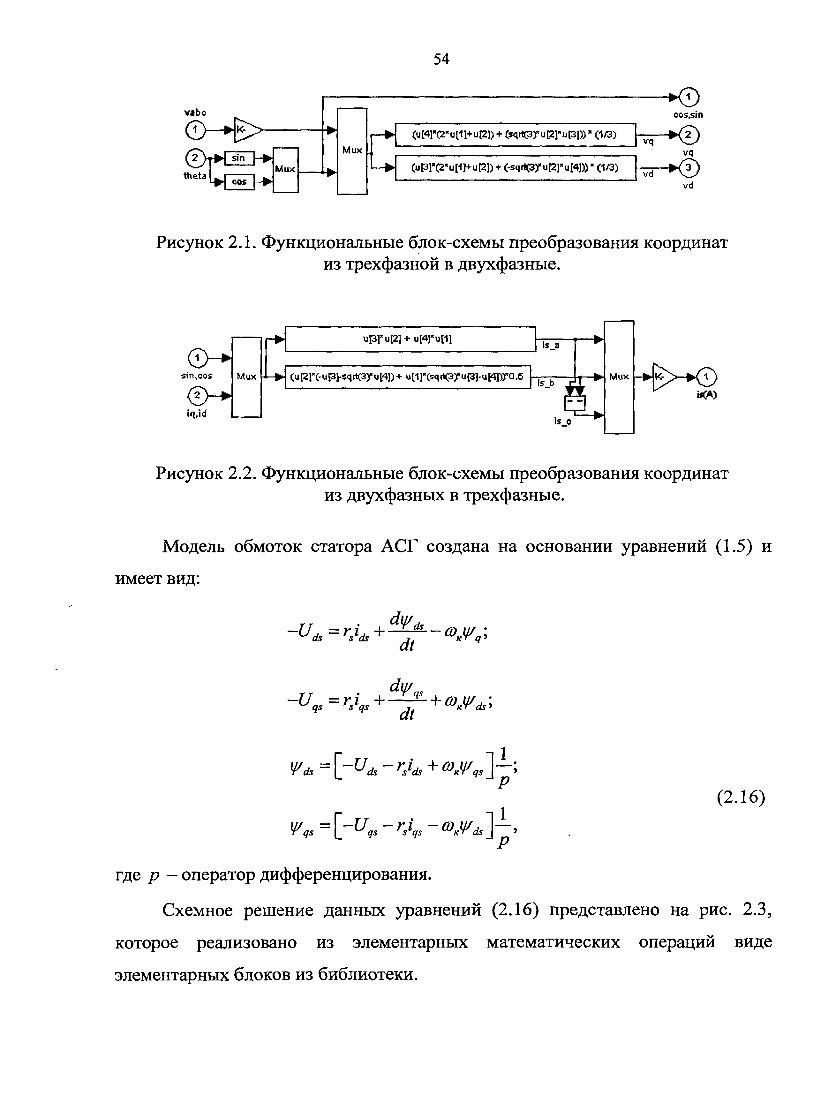
54
vabc
(2W^J> theta
Mux
Mux
(u[4]"(2"u[1]+u|2]) + (sqrl(3yut2]"upj))" (1/3) vq
(uP]'C2*u[1]+u|2]) + (-sqriC3)"uP]"u[4J)) " (1/3) vd
cos.sin
vq
-Цз) vd
Рисунок 2.1. Функциональные блок-схемы преобразования координат из трехфазной в двухфазные.
(Ту*
iq.id
Mux
—w
J - * -
u[3]*u[2] + u[4]"u[1J
(upr(-upj-sqri(3yu[4]) + u[1]'(SqriC3JC up]-u[4]))«0.6
is a
is b r|
is_c
,- -w
<=-*>
Mux - • is(A)
Рисунок 2.2. Функциональные блок-схемы преобразования координат из двухфазных в трехфазные.
Модель обмоток статора АСГ создана на основании уравнений (1.5) и
имеет вид:
dy/t
-U =ri . gs s gs ^
qs °>«Y*\
Wqs = \ru
qs ~ r
siqs ~ *W*]—
(2.16)
где p — оператор дифференцирования.
Схемное решение данных уравнений (2.16) представлено на рис. 2.3,
которое реализовано из элементарных математических операций виде
элементарных блоков из библиотеки.
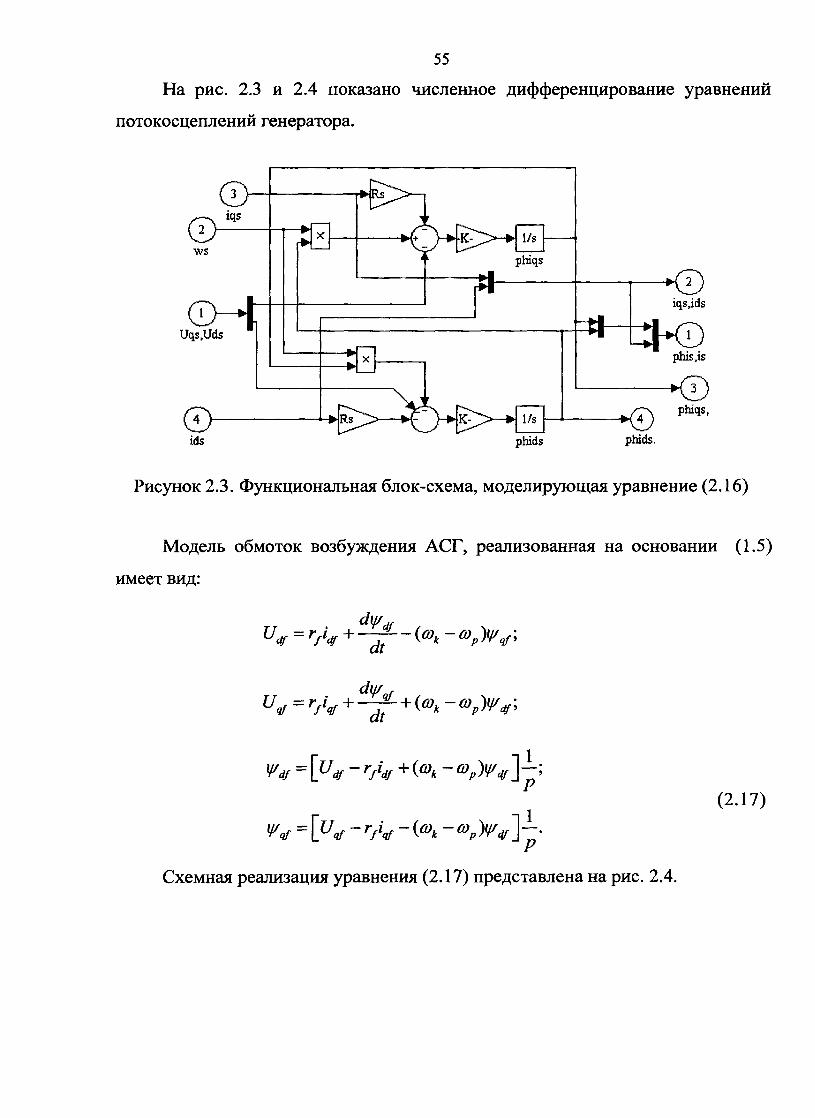
55
На рис. 2.3 и 2.4 показано численное дифференцирование уравнений
потокосцеплений генератора.
phids phids.
Рисунок 2.3. Функциональная блок-схема, моделирующая уравнение (2.16)
Модель обмоток возбуждения АСГ, реализованная на основании (1.5)
имеет вид:
U^ = rfi„ + —?- - (сок - сор )y/qf; '4Г~'Г4Г dt
dy/f £/„, = rfi„f + —2- + (фк - а)р yi/f; V"7V dt
Wdf = \Udf - rfidf + (<Dk - CQp)4/df~]-\
Схемная реализация уравнения (2.17) представлена на рис. 2.4.
(2.17)
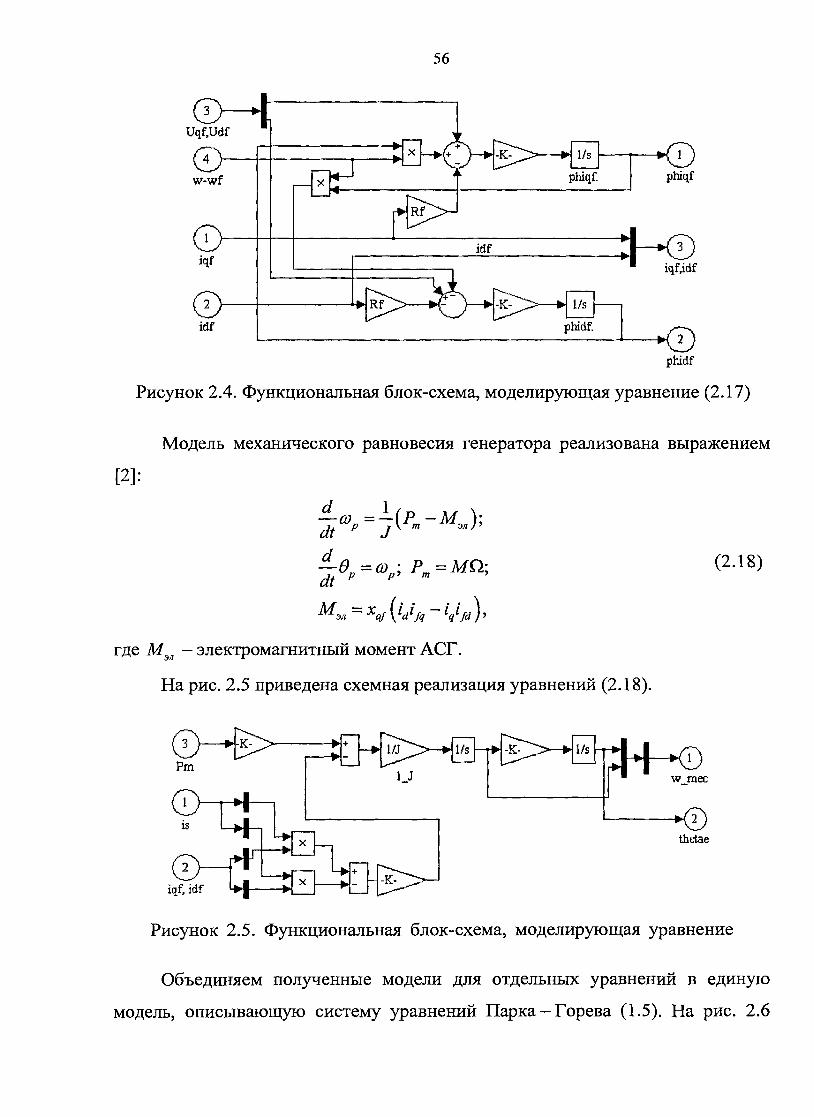
&-A Uqf.Udf
& w-wf
d> iqf
©" idf
56
Rf
-K-
idf
Rf
1/s
phiqf.
-K- 1/s
phidf.
<D phiqf
iqf.idf
•© phidf
Рисунок 2.4. Функциональная блок-схема, моделирующая уравнение (2.17)
Модель механического равновесия генератора реализована выражением
[2]:
^(Р.-м.); dt
fLe =0 • Pm=MQ; dt р р т
где Мэл - электромагнитный момент АСГ.
На рис. 2.5 приведена схемная реализация уравнений (2.18).
(2.18)
w тес
thetae
iqf, idf
Рисунок 2.5. Функциональная блок-схема, моделирующая уравнение
Объединяем полученные модели для отдельных уравнений в единую
модель, описывающую систему уравнений Парка-Горева (1.5). На рис. 2.6
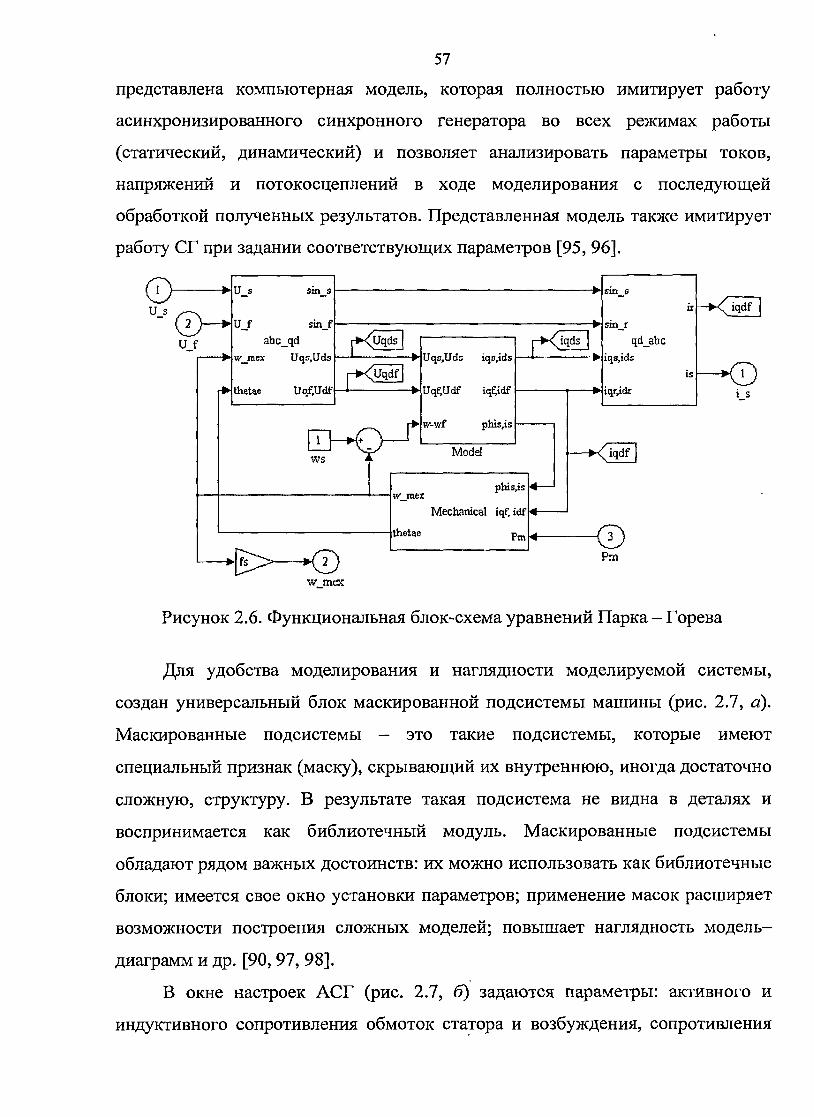
57
представлена компьютерная модель, которая полностью имитирует работу
асинхронизированного синхронного генератора во всех режимах работы
(статический, динамический) и позволяет анализировать параметры токов,
напряжений и потокосцеплений в ходе моделирования с последующей
обработкой полученных результатов. Представленная модель также имитирует
работу СГ при задании соответствующих параметров [95, 96].
О U s
U f
U_s sin_s
U_f sin_f
abc_qd
w_mex Uqs.Uds
thetae Uqf.Udf
fU Uqds
S* Uqdf
О Г
Uqs.Uds iqs.ids
Uqf,Udf iqf,idf
w-wf phis.is
r-X^iqds
ws Model
phis,is w_mex
Mechanical iqf.idf
thetae p m
- x ( iqdf
qd_abc
iqs.ids
iqr,idr <D
1 s
iqdf
Pm
Рисунок 2.6. Функциональная блок-схема уравнений Парка — Горева
Для удобства моделирования и наглядности моделируемой системы,
создан универсальный блок маскированной подсистемы машины (рис. 2.7, а).
Маскированные подсистемы - это такие подсистемы, которые имеют
специальный признак (маску), скрывающий их внутреннюю, иногда достаточно
сложную, структуру. В результате такая подсистема не видна в деталях и
воспринимается как библиотечный модуль. Маскированные подсистемы
обладают рядом важных достоинств: их можно использовать как библиотечные
блоки; имеется свое окно установки параметров; применение масок расширяет
возможности построения сложных моделей; повышает наглядность модель-
диаграмм и др. [90, 97, 98].
В окне настроек АСГ (рис. 2.7, б) задаются параметры: активного и
индуктивного сопротивления обмоток статора и возбуждения, сопротивления
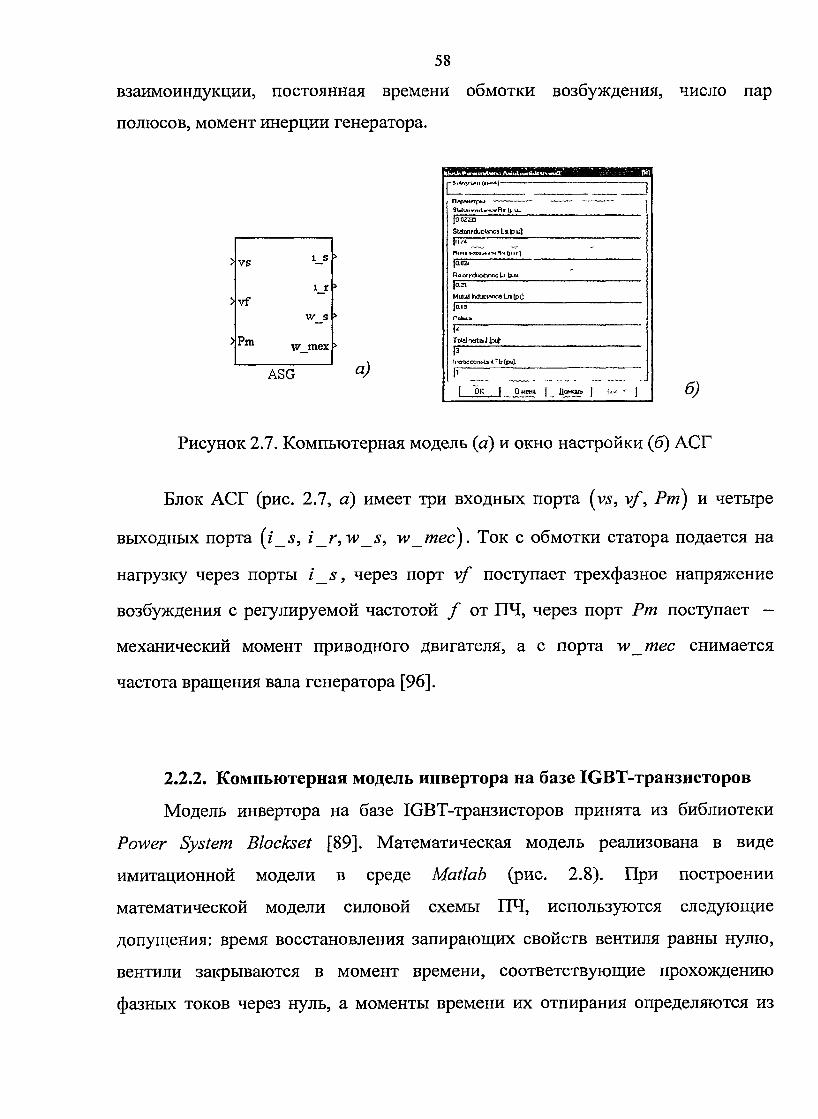
58
взаимоиндукции, постоянная времени обмотки возбуждения, число пар
полюсов, момент инерции генератора.
•krvhl*<r«MttttMc*;Ai<M»lrutiMrtn*ii3:
> VS
>vf
>Pm
i_s
1_Г|>
v/ тех
ASG a)
-Sul«yl*ii(«w^)"'
Пярлиярм ™— —
JO « 3 3
Stctonnduplance Lslp u\
|ao2<
Ro-« rduoOnoc U to-u
jazi Muud h*JctanceL« tpC
]ai9 РоЬ*э
Toial'KftraJIpui-
inerbecfflwtant 7b {puj.
_J 0иен4 | D0*^"» | 6)
Рисунок 2.7. Компьютерная модель (а) и окно настройки (б) АСГ
Блок АСГ (рис. 2.7, а) имеет три входных порта (vs, vf, Рт) и четыре
выходных порта (i_s, i_r,w_s, wmec). Ток с обмотки статора подается на
нагрузку через порты i_s, через порт vf поступает трехфазное напряжение
возбуждения с регулируемой частотой / от ПЧ, через порт Рт поступает —
механический момент приводного двигателя, а с порта w_mec снимается
частота вращения вала генератора [96].
2.2.2. Компьютерная модель инвертора на базе IGBT-транзисторов
Модель инвертора на базе IGBT-транзисторов принята из библиотеки
Power System Blockset [89]. Математическая модель реализована в виде
имитационной модели в среде Matlab (рис. 2.8). При построении
математической модели силовой схемы ПЧ, используются следующие
допущения: время восстановления запирающих свойств вентиля равны нулю,
вентили закрываются в момент времени, соответствующие прохождению
фазных токов через нуль, а моменты времени их отпирания определяются из
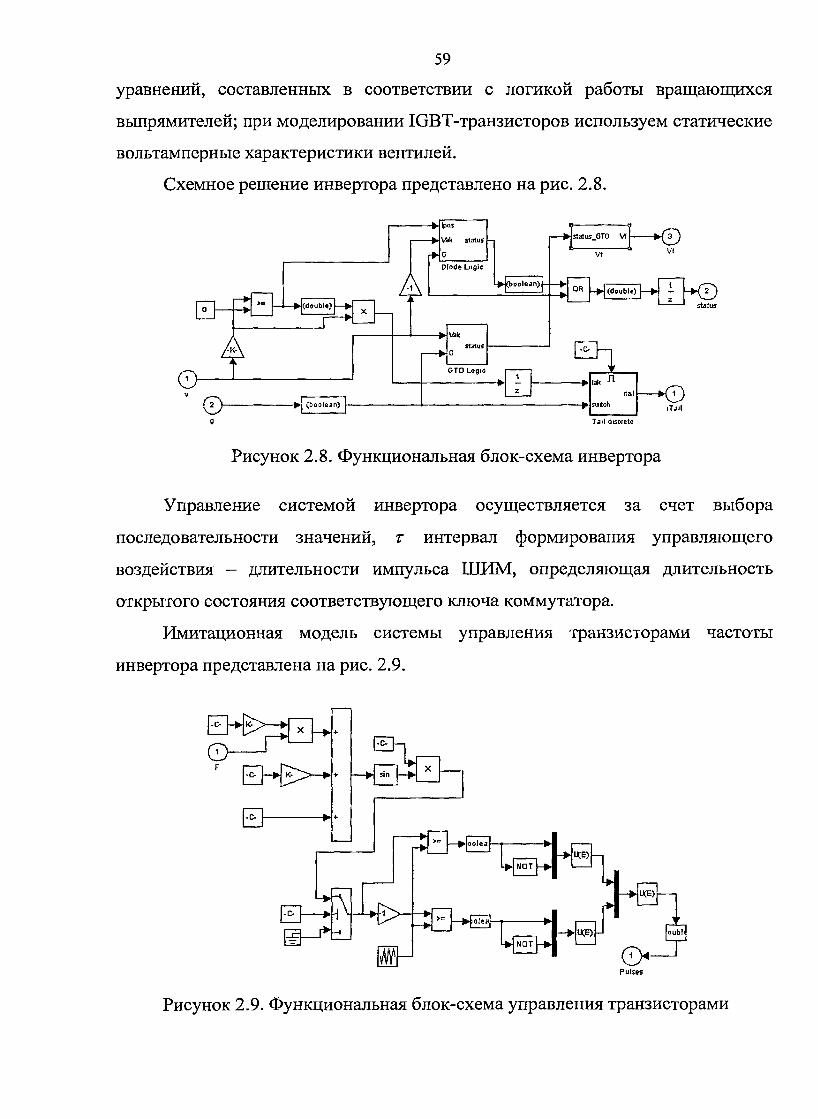
59
уравнений, составленных в соответствии с логикой работы вращающихся
выпрямителей; при моделировании ЮВТ-транзисторов используем статические
вольтамперные характеристики вентилей.
Схемное решение инвертора представлено на рис. 2.8.
0 >»
А (double)
О
IpOS
Viik status
С
Diode Logic
(boolean)
©- (boolean)
status GTO Vf <D
J (double) У> i -+©
GTO Logio i^n П
|Тл1
Tail discrete
Рисунок 2.8. Функциональная блок-схема инвертора
Управление системой инвертора осуществляется за счет выбора
последовательности значений, т интервал формирования управляющего
воздействия — длительности импульса ШИМ, определяющая длительность
открытого состояния соответствующего ключа коммутатора.
Имитационная модель системы управления транзисторами частоты
инвертора представлена на рис. 2.9.
•С -frj^>—» ^ l m
Ж
i N 0 T r * l —
> = —•falea}-
Zp&-«I—I Л i—i jf
I—•"CE)J Ubi]
о-Pulses
Рисунок 2.9. Функциональная блок-схема управления транзисторами
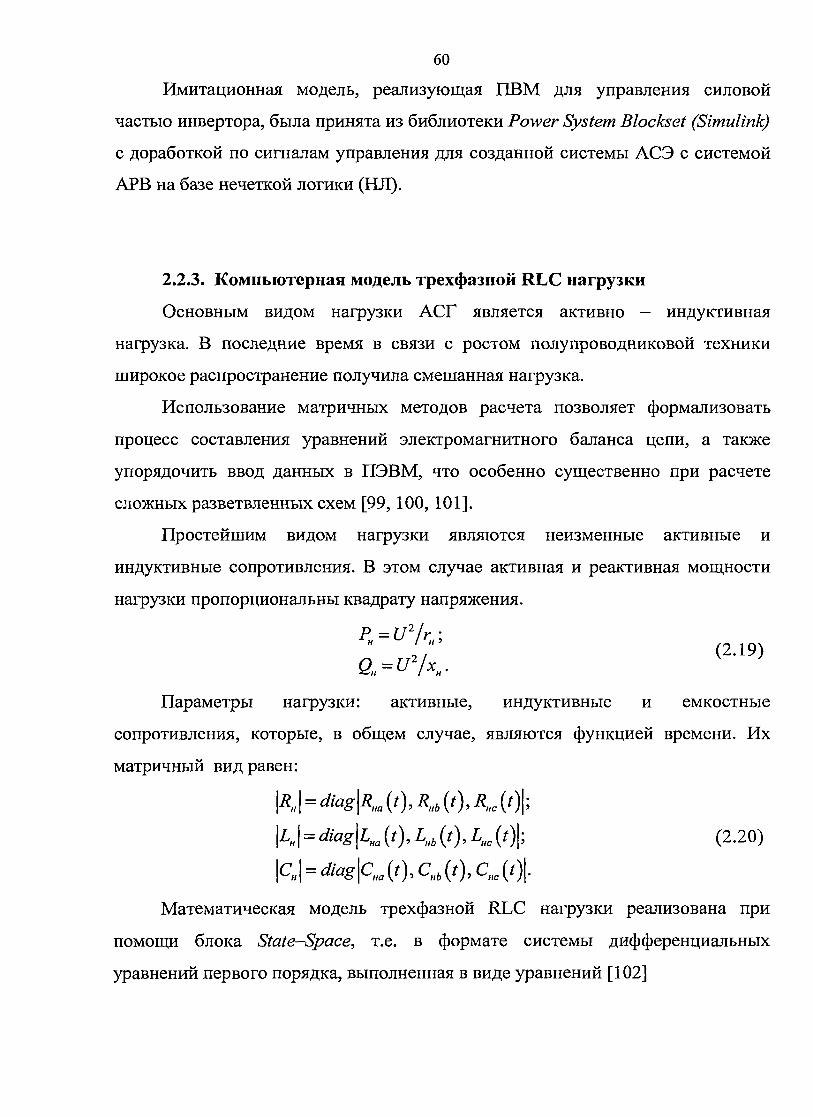
60
Имитационная модель, реализующая ПВМ для управления силовой
частью инвертора, была принята из библиотеки Power System Blockset (Simulink)
с доработкой по сигналам управления для созданной системы АСЭ с системой
АРВ на базе нечеткой логики (НЛ).
2.2.3. Компьютерная модель трехфазной RLC нагрузки
Основным видом нагрузки АСГ является активно - индуктивная
нагрузка. В последние время в связи с ростом полупроводниковой техники
широкое распространение получила смешанная нагрузка.
Использование матричных методов расчета позволяет формализовать
процесс составления уравнений электромагнитного баланса цепи, а также
упорядочить ввод данных в ПЭВМ, что особенно существенно при расчете
сложных разветвленных схем [99, 100, 101].
Простейшим видом нагрузки являются неизменные активные и
индуктивные сопротивления. В этом случае активная и реактивная мощности
нагрузки пропорциональны квадрату напряжения.
Q„ = u2lx».
Параметры нагрузки: активные, индуктивные и емкостные
сопротивления, которые, в общем случае, являются функцией времени. Их
матричный вид равен:
\K\ = diag\RHa(t),Rllb(t),RHC(t)\;
\L„\ = diag\LHa (t), Lllb (t), LHC (t)\; (2.20)
\CH\ = diag\CHa(t),CHb(t),C,lc(t)\.
Математическая модель трехфазной RLC нагрузки реализована при
помощи блока State-Space, т.е. в формате системы дифференциальных
уравнений первого порядка, выполненная в виде уравнений [102]
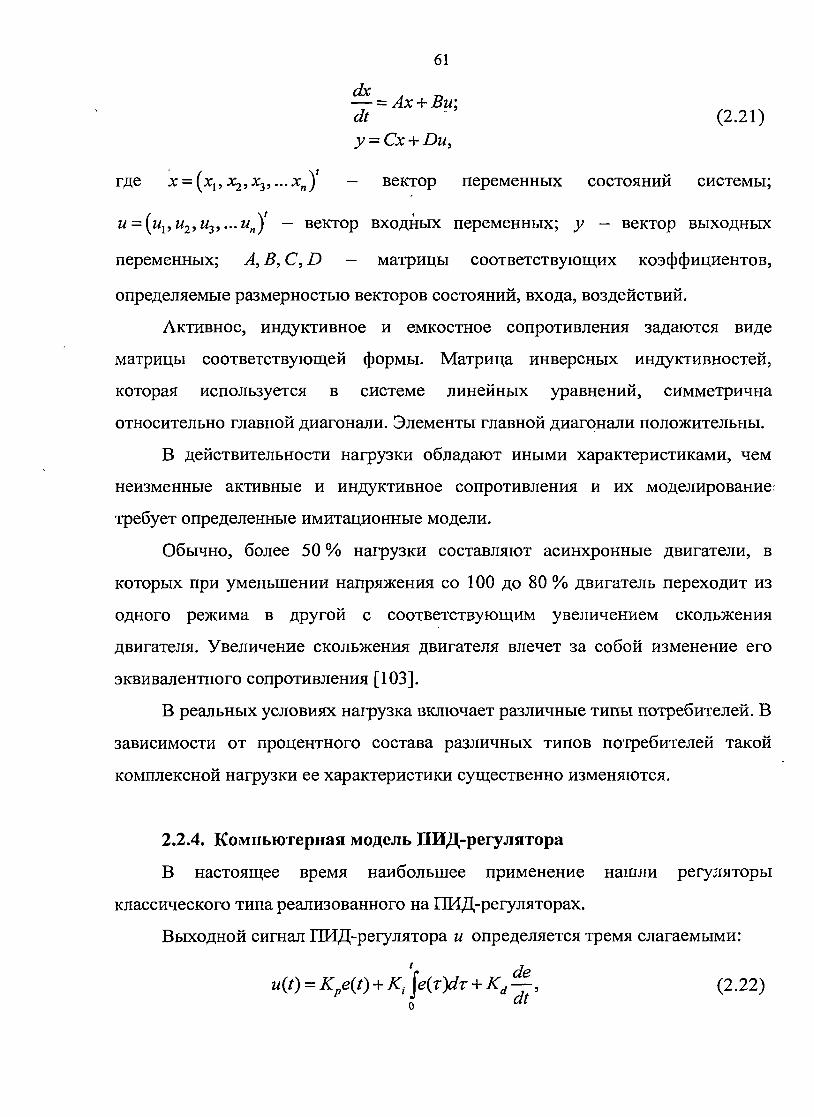
61
— = Ах + Bu; dt (2.21) у = Cx + Du,
где x = [x^x2,x3,...xn) — вектор переменных состояний системы;
w = (w,,м2,и3,...и„) - вектор входных переменных; у — вектор выходных
переменных; A, B,C,D - матрицы соответствующих коэффициентов,
определяемые размерностью векторов состояний, входа, воздействий.
Активное, индуктивное и емкостное сопротивления задаются виде
матрицы соответствующей формы. Матрица инверсных индуктивностей,
которая используется в системе линейных уравнений, симметрична
относительно главной диагонали. Элементы главной диагонали положительны.
В действительности нагрузки обладают иными характеристиками, чем
неизменные активные и индуктивное сопротивления и их моделирование;
требует определенные имитационные модели.
Обычно, более 50 % нагрузки составляют асинхронные двигатели, в
которых при уменьшении напряжения со 100 до 80 % двигатель переходит из
одного режима в другой с соответствующим увеличением скольжения
двигателя. Увеличение скольжения двигателя влечет за собой изменение его
эквивалентного сопротивления [103].
В реальных условиях нагрузка включает различные типы потребителей. В
зависимости от процентного состава различных типов потребителей такой
комплексной нагрузки ее характеристики существенно изменяются.
2.2.4. Компьютерная модель ПИД-регулятора
В настоящее время наибольшее применение нашли регуляторы
классического типа реализованного на ПИД-регуляторах.
Выходной сигнал ПИД-регулятора и определяется тремя слагаемыми:
с dc м(0 = Kpe(t) + Kt \e(r)dT + Kd—, (2.22)
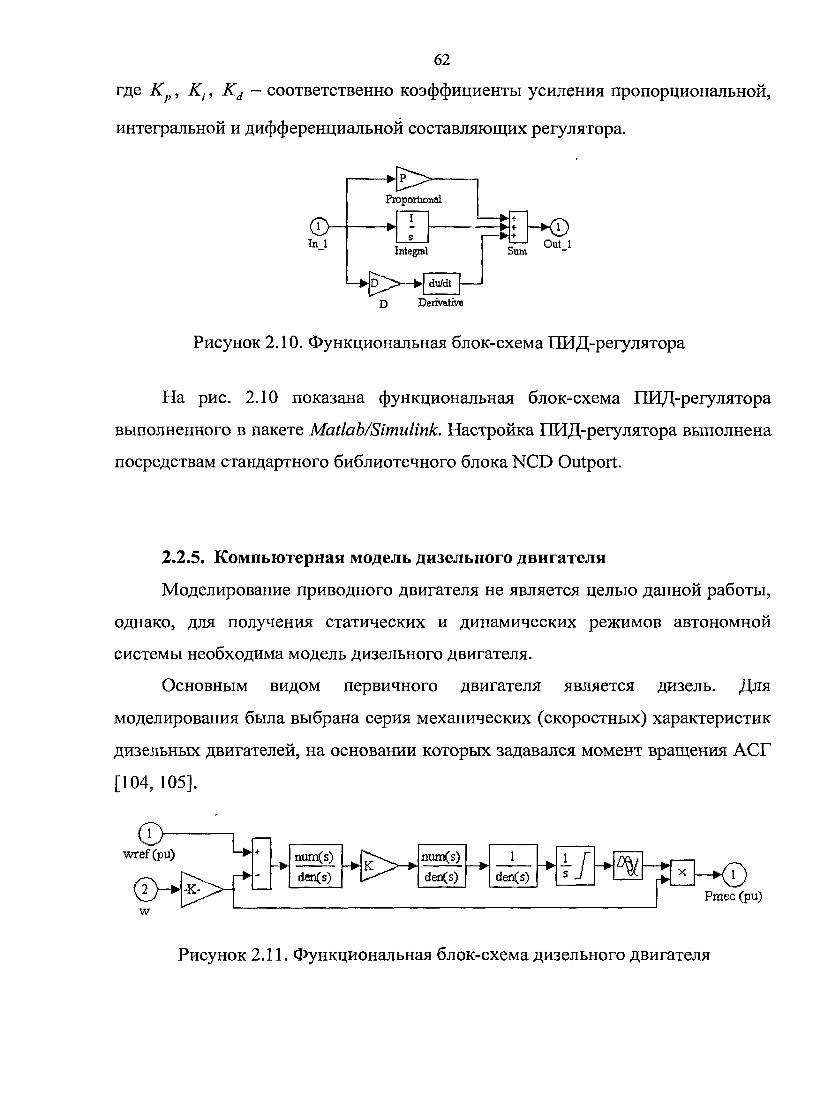
62
где К , Kj, Kd - соответственно коэффициенты усиления пропорциональной,
интегральной и дифференциальной составляющих регулятора.
Derivative
Рисунок 2.10. Функциональная блок-схема ПИД-регулятора
На рис. 2.10 показана функциональная блок-схема ПИД-регулятора
выполненного в пакете Matlab/Simulink. Настройка ПИД-регулятора выполнена
посредствам стандартного библиотечного блока NCD Outport.
2.2.5. Компьютерная модель дизельного двигателя
Моделирование приводного двигателя не является целью данной работы,
однако, для получения статических и динамических режимов автономной
системы необходима модель дизельного двигателя.
Основным видом первичного двигателя является дизель. Для
моделирования была выбрана серия механических (скоростных) характеристик
дизельных двигателей, на основании которых задавался момент вращения АСГ
[104, 105].
wref (pu)
®->: •к-
w
num(s)
den(s) К
num(s)
den(s) den(s) f/HS Pmec (pu)
Рисунок 2.11. Функциональная блок-схема дизельного двигателя
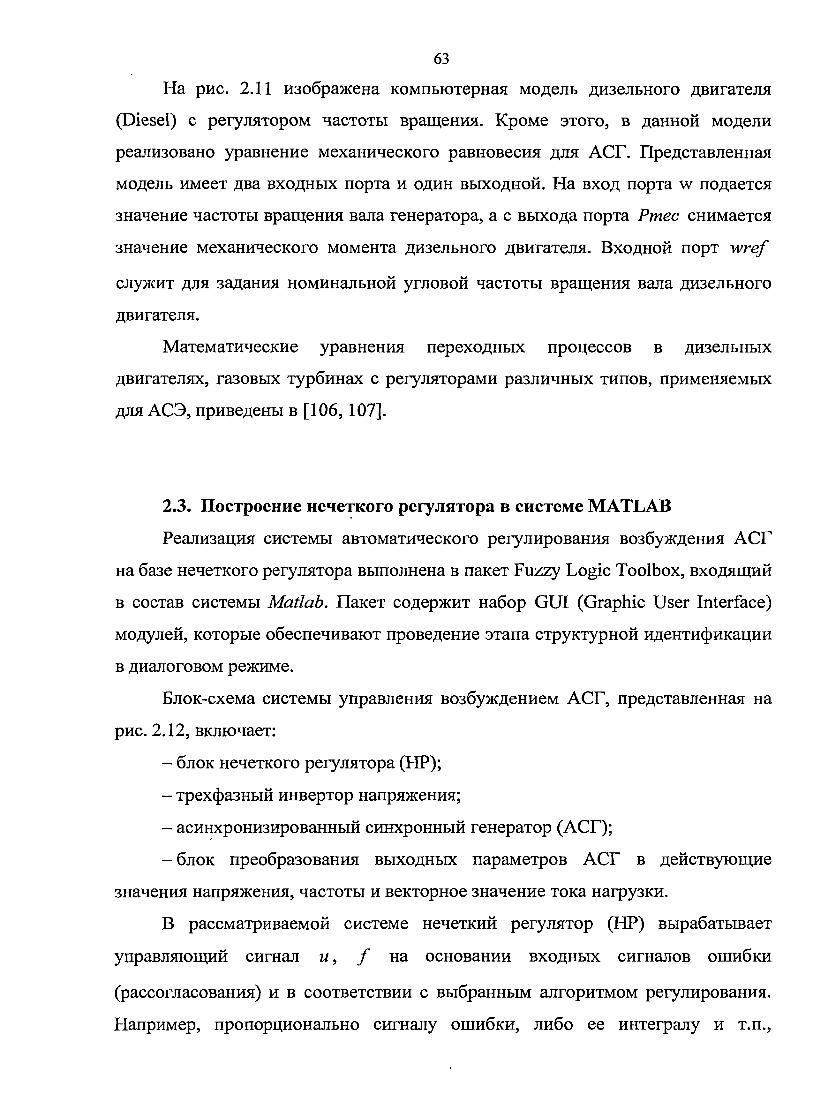
63
На рис. 2.11 изображена компьютерная модель дизельного двигателя
(Diesel) с регулятором частоты вращения. Кроме этого, в данной модели
реализовано уравнение механического равновесия для АСГ. Представленная
модель имеет два входных порта и один выходной. На вход порта w подается
значение частоты вращения вала генератора, а с выхода порта Ртес снимается
значение механического момента дизельного двигателя. Входной порт wref
служит для задания номинальной угловой частоты вращения вала дизельного
двигателя.
Математические уравнения переходных процессов в дизельных
двигателях, газовых турбинах с регуляторами различных типов, применяемых
для АСЭ, приведены в [106, 107].
2.3. Построение нечеткого регулятора в системе MATLAB
Реализация системы автоматического регулирования возбуждения АСГ
на базе нечеткого регулятора выполнена в пакет Fuzzy Logic Toolbox, входящий
в состав системы Matlab. Пакет содержит набор GUI (Graphic User Interface)
модулей, которые обеспечивают проведение этапа структурной идентификации
в диалоговом режиме.
Блок-схема системы управления возбуждением АСГ, представленная на
рис. 2.12, включает:
- блок нечеткого регулятора (HP);
- трехфазный инвертор напряжения;
- асинхронизированный синхронный генератор (АСГ);
-блок преобразования выходных параметров АСГ в действующие
значения напряжения, частоты и векторное значение тока нагрузки.
В рассматриваемой системе нечеткий регулятор (HP) вырабатывает
управляющий сигнал и, / н а основании входных сигналов ошибки
(рассогласования) и в соответствии с выбранным алгоритмом регулирования.
Например, пропорционально сигналу ошибки, либо ее интегралу и т.п.,
64
который поступает на вход инвертора напряжения, для формирования
заданного напряжения возбуждения.
->&+
W (9 •
HP
и
и
Л
с
Jc
Инвертор и ' .
Преобразователь
АСГ ~и.
• т.
и
J
Рисунок 2.12. Структура замкнутой системы управления возбуждением АСГ
В нечетком регуляторе в качестве обратной связей использованы
отклонения напряжения AU и частоты напряжения А/. Отсутствует обратная
связь по производной тока возбуждения. Предварительное исследование
показало эффективность выбранной схемы [45, 64, 65, 66, 67, 108, 109].
Общая схема обработки нечеткой информации (нечеткий регулятор) в
системах управления организована следующим образом (рис. 2.13). Точные
исходные данные с датчиков, контролирующих управляющий процесс,
переводятся в значения лингвистических переменных в специальном блоке,
получившем название «фаззификатор». Далее реализуются процедуры
нечеткого вывода на множестве продукционных правил, составляющих базу
знаний системы управления. В результате чего формируются выходные
лингвистические значения, которые переводятся в точные значения результатов
вычислений в специальном блоке, получившем название «дефаззификатор».
На выходе последнего формируются управляющие воздействия на
исполнительные механизмы. Эта концептуальная схема лежит в основе так
называемого нечеткого контроллера, используемого в интеллектуальных
системах обработки неопределенной информации, в частности, в системах
интеллектуального управления на базе микроконтроллера [75].
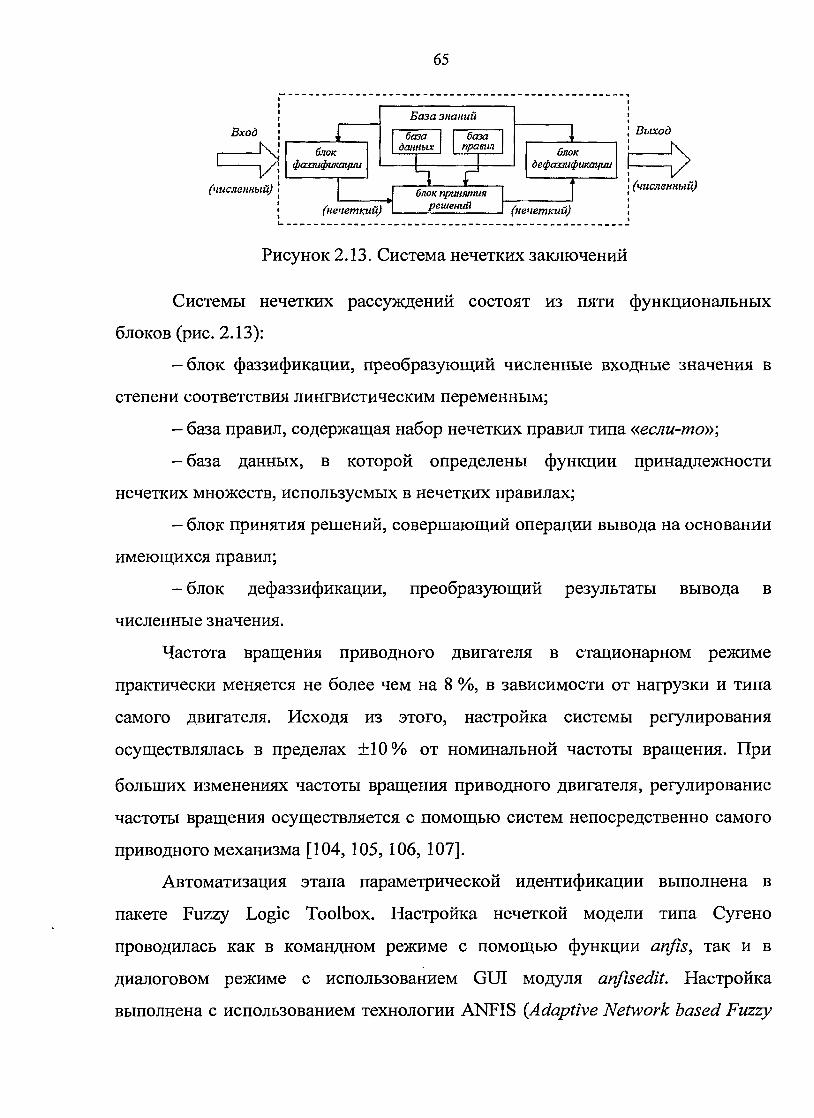
65
Вход
(численный)
блок фаззификации
База знаний
база данных
база правил
(нечеткий)
£2 блок дефаззификации
блок принятия решений
Выход
(нечеткий)
(численный)
Рисунок 2.13. Система нечетких заключений
Системы нечетких рассуждений состоят из пяти функциональных
блоков (рис. 2.13):
— блок фаззификации, преобразующий численные входные значения в
степени соответствия лингвистическим переменным;
— база правил, содержащая набор нечетких правил типа «если-то»;
— база данных, в которой определены функции принадлежности
нечетких множеств, используемых в нечетких правилах;
— блок принятия решений, совершающий операции вывода на основании
имеющихся правил;
-блок дефаззификации, преобразующий результаты вывода в
численные значения.
Частота вращения приводного двигателя в стационарном режиме
практически меняется не более чем на 8 %, в зависимости от нагрузки и типа
самого двигателя. Исходя из этого, настройка системы регулирования
осуществлялась в пределах ±10% от номинальной частоты вращения. При
больших изменениях частоты вращения приводного двигателя, регулирование
частоты вращения осуществляется с помощью систем непосредственно самого
приводного механизма [104, 105, 106, 107].
Автоматизация этапа параметрической идентификации выполнена в
пакете Fuzzy Logic Toolbox. Настройка нечеткой модели типа Сугено
проводилась как в командном режиме с помощью функции an/is, так и в
диалоговом режиме с использованием GUI модуля anfisedit. Настройка
выполнена с использованием технологии ANFIS (Adaptive Network based Fuzzy
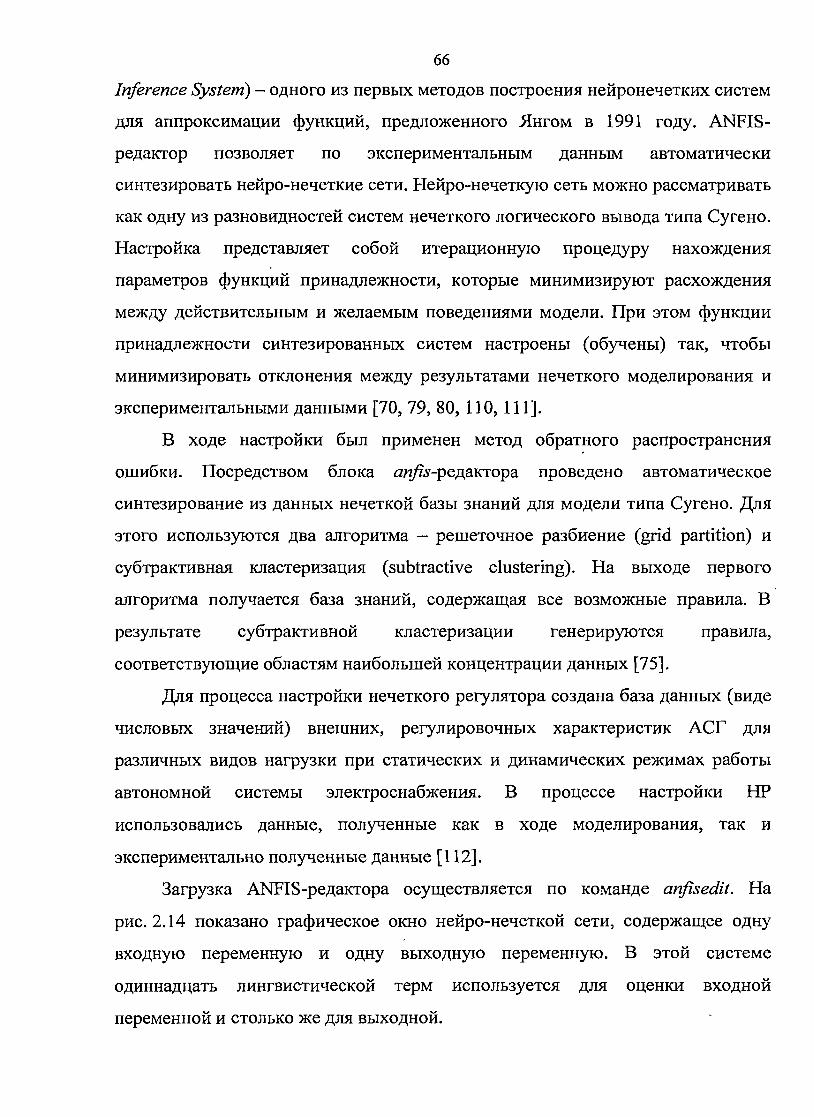
66
Inference System) — одного из первых методов построения нейронечетких систем
для аппроксимации функций, предложенного Янгом в 1991 году. ANFIS-
редактор позволяет по экспериментальным данным автоматически
синтезировать нейро-нечеткие сети. Нейро-нечеткую сеть можно рассматривать
как одну из разновидностей систем нечеткого логического вывода типа Сугено.
Настройка представляет собой итерационную процедуру нахождения
параметров функций принадлежности, которые минимизируют расхождения
между действительным и желаемым поведениями модели. При этом функции
принадлежности синтезированных систем настроены (обучены) так, чтобы
минимизировать отклонения между результатами нечеткого моделирования и
экспериментальными данными [70, 79, 80, 110, 111].
В ходе настройки был применен метод обратного распространения
ошибки. Посредством блока сш/и-редактора проведено автоматическое
синтезирование из данных нечеткой базы знаний для модели типа Сугено. Для
этого используются два алгоритма - решеточное разбиение (grid partition) и
субтрактивная кластеризация (subtractive clustering). На выходе первого
алгоритма получается база знаний, содержащая все возможные правила. В
результате субтрактивной кластеризации генерируются правила,
соответствующие областям наибольшей концентрации данных [75].
Для процесса настройки нечеткого регулятора создана база данных (виде
числовых значений) внешних, регулировочных характеристик АСГ для
различных видов нагрузки при статических и динамических режимах работы
автономной системы электроснабжения. В процессе настройки HP
использовались данные, полученные как в ходе моделирования, так и
экспериментально полученные данные [112].
Загрузка ANFIS-редактора осуществляется по команде anfisedit. На
рис. 2.14 показано графическое окно нейро-нечеткой сети, содержащее одну
входную переменную и одну выходную переменную. В этой системе
одиннадцать лингвистической терм используется для оценки входной
переменной и столько же для выходной.
67
output
Рисунок 2.14. Структура нейро-нечеткой ANFIS сети
Входы и выход модели рассмотрены как лингвистические переменные,
значения которых определялись следующими терм-множествами: {«Низкий»,
«Средний», «Высокий»} для х и {«Низкий», «Ниже Среднего», «Средний»,
«Выше Среднего», «Высокий»} для у.
Рассмотрим назначение слоев сети.
Слой 1. Каждый узел является адаптивным с передаточной функцией
О) = JUJ (х), где Д - лингвистическая «нечеткая» переменная, ассоциированная
с данным узлом.
Формализацию термов осуществим с помощью симметричной
гауссовской функцией принадлежности (gaussmf) [75]:
(x-h)2
»А(х) = е~2''- ( 2 ' 2 3 )
где х - элемент универсального множества; h - параметр функции
принадлежности (координата максимума); с - параметр функции
принадлежности (коэффициент концентрации).
Выбор такого типа функции принадлежности обусловлен ее достаточной
гибкостью и простотой - она задается лишь двумя параметрами. Это позволяет
сократить размерность задачи оптимизации, возникающей на этапе
параметрической идентификации [113].
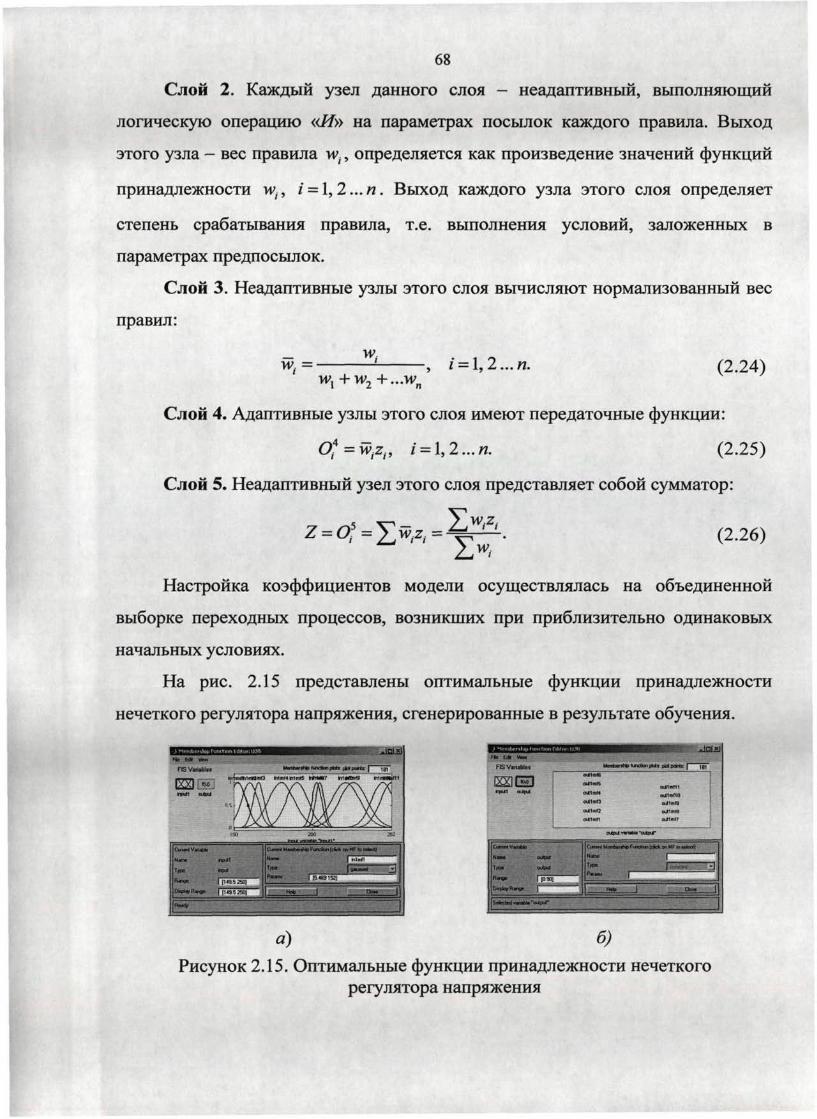
68
Слой 2. Каждый узел данного слоя - неадаптивный, выполняющий
логическую операцию «И» на параметрах посылок каждого правила. Выход
этого узла - вес правила wi, определяется как произведение значений функций
принадлежности wn / = 1,2... и. Выход каждого узла этого слоя определяет
степень срабатывания правила, т.е. выполнения условий, заложенных в
параметрах предпосылок.
Слой 3. Неадаптивные узлы этого слоя вычисляют нормализованный вес
правил:
W W, =•
wx+w2+...wn
" у 1 ~"~ I а ^* • • • ft • (2.24)
Слой 4. Адаптивные узлы этого слоя имеют передаточные функции:
C>4=iv,.z., / = 1,2...л. (2.25)
Слой 5. Неадаптивный узел этого слоя представляет собой сумматор:
7 ri V - Hw'zi (2.26)
Настройка коэффициентов модели осуществлялась на объединенной
выборке переходных процессов, возникших при приблизительно одинаковых
начальных условиях.
На рис. 2.15 представлены оптимальные функции принадлежности
нечеткого регулятора напряжения, сгенерированные в результате обучения.
* » *»» FlSVarwblte Member»***™*™)**, дереве | i 5 T
.и м у. ktlmflMmrflmO MmM mimrt ЫгШГ i nn r tn t t mmfefcfH
M M U w x i l
T jpt «put
н*ч* | iittiaq DttplwRenfle j [1*95250]
200 251?
u*r«*Me«*b«Ai»FwKftontefckWfMFiesfliect|
HMM [ ^Vrti ' , д а * jsKMW»! j j
P*«« | 15*63152)
Нф Oo** J
R«»*
J P l x J
ЮЕ0
1
ouKmffi
ourimfS
outlmf*
OtflmO
gutlnrf2
w i 1 mfi
Menbasty function pM* ctatoorti f
ouHwfll
outlmflO
M t t M
aunmffi
Cni1mf7
181
outpu vwntte 'output"
DfKHVdnabfa
K M W
T J *
Beige
tiftpfcyfiange
output
output
I 1010)
I Seiettod vao*bie *•*•*•
Cunnrf Mcmbetfhp funOvn {ofck •
Saw
Тдае
p.™ i
н * t
п Ы Г № м М
1 (:„««
О т *
d
1
a) 6)
Рисунок 2.15. Оптимальные функции принадлежности нечеткого регулятора напряжения
69
В ходе настройки применен метод обратного распространения ошибки.
Рассматриваемые выборки переходных процессов имели размер не менее
100000 точек. Нечеткая модель оптимизирована по обучающей выборке из 1000
пар «вход - выход». Средняя квадратичная ошибка идентификации модели на
контрольной выборке из 1000 точек составила 0,47 для абсолютного значения
входных переменных.
шшшшшшашшшшшшшшияшт л и шяаштшяшшшшашашшштт!. п̂ы I k t t M . am» В» И * . Л*и.
«-' »•' „., '-"••» **м.„г
•czo cztn с о : I. i i F=ffl
^ б;
Рисунок 2.16. Системы нечетких правил
Эффективное использование нечетких систем сталкивается с проблемой
выбора адекватного для решения конкретной задачи механизма логического
вывода и типов агрегации выходных значений, логических правил.
Оптимальный выбор и упрощение совокупности правил вывода и их структуры
также является важной, но малоизученной задачей.
Для эффективной работы регулятора на базе нечеткой логики,
математическая модель динамических режимов асинхронизированного
синхронного генератора (1.5) должна адекватно отражать реальные процессы в
автономной энергосистеме с минимальной ошибкой.
Выполним оценку минимальной ошибки.
Выход модели ут(к) в к-й момент времени при регулировании
возбуждения должен соответствовать идеальному выходному напряжению
у (к) с минимальной ошибкой [70, 74]:
# = J-hZ(y(k)-yM)2 ^niin, (2.27)
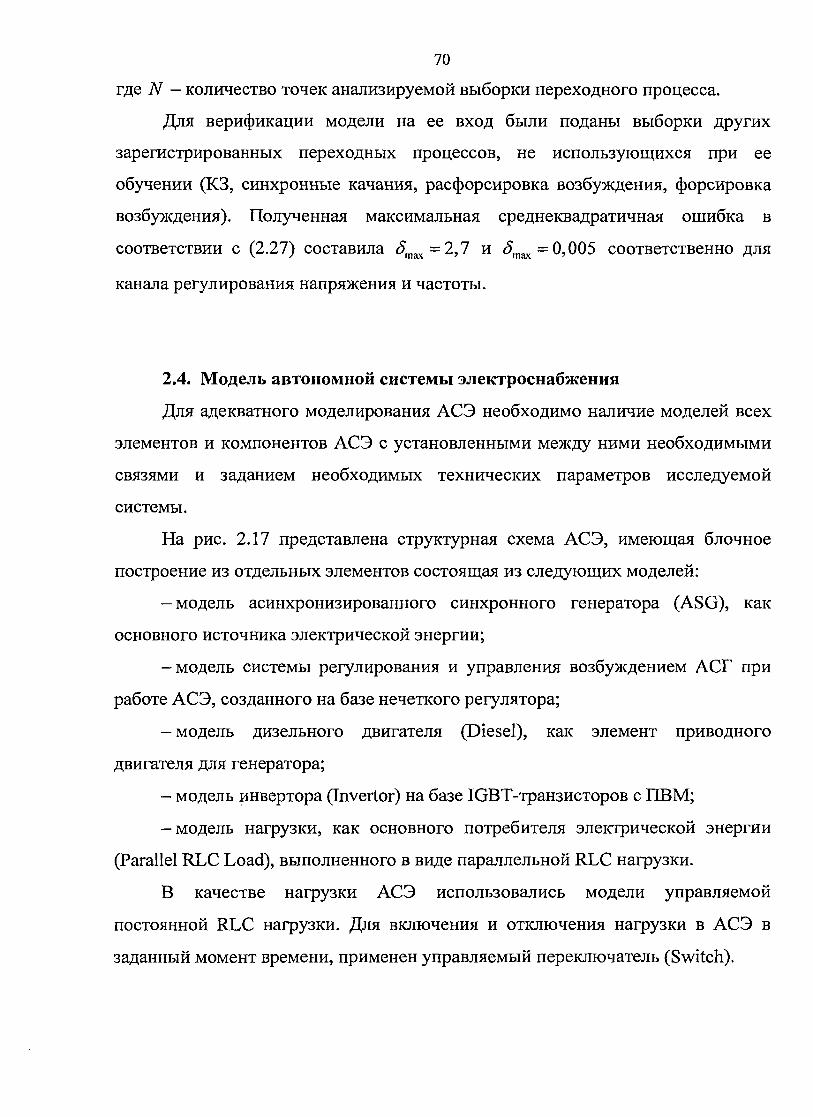
70
где N — количество точек анализируемой выборки переходного процесса.
Для верификации модели на ее вход были поданы выборки других
зарегистрированных переходных процессов, не использующихся при ее
обучении (КЗ, синхронные качания, расфорсировка возбуждения, форсировка
возбуждения). Полученная максимальная среднеквадратичная ошибка в
соответствии с (2.27) составила <2тах=2,7 и ^ ^ =0,005 соответственно для
канала регулирования напряжения и частоты.
2.4. Модель автономной системы электроснабжения
Для адекватного моделирования АСЭ необходимо наличие моделей всех
элементов и компонентов АСЭ с установленными между ними необходимыми
связями и заданием необходимых технических параметров исследуемой
системы.
На рис. 2.17 представлена структурная схема АСЭ, имеющая блочное
построение из отдельных элементов состоящая из следующих моделей:
— модель асинхронизированного синхронного генератора (ASG), как
основного источника электрической энергии;
-модель системы регулирования и управления возбуждением АСГ при
работе АСЭ, созданного на базе нечеткого регулятора;
-модель дизельного двигателя (Diesel), как элемент приводного
двигателя для генератора;
- модель инвертора (Invertor) на базе IGBT-транзисторов с ПВМ;
-модель нагрузки, как основного потребителя электрической энергии
(Parallel RLC Load), выполненного в виде параллельной RLC нагрузки.
В качестве нагрузки АСЭ использовались модели управляемой
постоянной RLC нагрузки. Для включения и отключения нагрузки в АСЭ в
заданный момент времени, применен управляемый переключатель (Switch).
71
PtnlblKLCLotd <
rOw
32
U</1
« — Ш P«n]MW.CLo«d
F i t ] ]> •
Invertor
wref fj>u) Pmec rj>u)
l_s
i r CD
Diesel
X ^ K.«J " \
I 1"'-11 >+-
FOl > 4 -
dU U
df f
И <Г ич
« <^ fr»_d
Fuzzy Logic Controller
rX^ IU-Я
Uabc_stator I—I
Ua_stator
> Us1 rH To Workspace
labo_?t3tor la stator
*• ы To Workspaee4
Uabcjxrtor Ua_rotor
* Ur
To Workspaces
1зЬс_го|ог
lajrrtor
LT*t in
To Workspaces
Рисунок 2.17. Компьютерная модель автономной системы электроснабжения на базе АСГ с системой регулирования на базе
нечеткой логики
13
13
Важным условием правильного моделирования и, соответственно,
успешного математического анализа, является предварительная подготовка
данных, которая включает различные преобразования исходных, «сырых»
экспериментальных значений.
Исходные данные практически всегда содержат погрешности, как
случайные, так и систематические. Их можно объяснить как сбоем устройств
измерения, так и различного рода помехами. Для того чтобы уменьшить
влияние случайного шума, применяют различные методы сглаживания данных.
В системе Matlab детально проработано и реализовано большое количество
различных методов обработки данных. Одним из распространенных и часто
используемых методов является метод сглаживания Савицкого - Голея.
Использование полиноминального метода Савицкого - Голея приводит к
меньшему изменению высоты аналитического сигнала по сравнению с
методами бегущего среднего и взвешенного среднего, однако в этом случае
наблюдается искажение формы аналитического сигнала [57, 98].
72
Параметризация модели. Как правило, заводы-изготовители не
предоставляют значения всех параметров, необходимых для построения
модели, поэтому второй сложной задачей является определение параметров,
необходимых для моделирования. Если, например, для линий связи,
трансформаторов, реакторов параметры моделирования совпадают, то для
электрических машин приходится разрабатывать методики определения
параметров модели. По параметрам, предоставляемым заводом изготовителем,
можно построить только статическую модель. Для построения динамических
моделей требуется расчет дополнительных параметров по достаточно
известным и апробированным методикам. На основании вышеизложенного, в
четвертой главе диссертации приводятся экспериментально полученные
данные, необходимые для компьютерного моделирования автономной системы
электроснабжения [29, 86, 114].
ВЫВОДЫ ПО ВТОРОЙ ГЛАВЕ
1. Созданы компьютерные модели всех основных компонентов АСЭ и
определены связи между ними. Это позволило составить единую
математическую модель АСЭ на базе АСГ с различными типами нагрузки.
2. Разработанная компьютерная модель позволяет производить
исследования статических и динамических режимов работы исследуемой
автономной системы обусловленных изменением ее параметров и структуры
при различном характере нагрузку и частоты вращения приводного двигателя.
3. Показано, что нечеткие регуляторы в условиях непредсказуемых
изменениях величины и характера нагрузки, а также с нестабильной частотой
вращения приводного дизельного двигателя позволяют построить, достаточно
простые (с вычислительной точки зрения), быстродействующие алгоритмы
управления, которые являются малочувствительными к действию
параметрических возмущений и помех. Эвристическая по характеру процедура
73
проектирования нечетких регуляторов в части выбора числа нечетких
переменных, вида и параметров функций принадлежности, генерации
множества правил базы знаний, метода дефаззификации получает
определенную формализацию при использовании искусственных нейронных
сетей с обучением.
4. Решена задача комплексной оптимизации HP к системе автономного
электроснабжения выполненного на базе АСГ. Применена теория нечетких
множеств, для процесса поиска решения задачи комплексной оптимизации и
настройки АРВ по электромагнитному критерию для АСЭ.
5. Разработанная программа расчета АСГ для АСЭ позволяет провести
функциональный и параметрический анализ генератора и системы
автоматического регулирования возбуждения, оценить эффективность
(качество) регулирования, как при постоянной, так и при переменной частоте
вращения приводного двигателя.
74
ГЛАВА3
АНАЛИЗ ХАРАКТЕРИСТИК МОДЕЛИ
АСИНХРОНИЗИРОВАННОГО СИНХРОННОГО ГЕНЕРАТОРА ПРИ
АВТОНОМНОЙ РАБОТЕ
3.1. Основные энергетические соотношения
3.1.1. Уравнения напряжений и токов АСГ
Формулы для расчета основных характеристик,
а) статор:
ix=iasmrk+ificosrk;
iy = iacosyk-ifismrk. (3-1)
б) ротор:
(3.2) ^ = ^ s i n ^ + / / 9 c o s ? V ijy=ifdcosrkp-ifqsmylg).
Принимаем ось х за действительную, а ось у за мнимую оси тогда
lf=lfa + Jlfy ~ lJdqe > lap =lfi+ Jla' -r _ . . . . (3.3) lfdq-lfq+J*fd> П = \(okdt\
для напряжений ux, uy и ufq, u/d можно написать те же уравнения.
Запишем уравнения универсальной электрической машины:
1 (3-4)
75
j
~UJy =HJy +Jt{hiJy+L*fiy)^(Db-0)p){Lfifi+Lafi
X)> j
(3.5)
dt
Эти же уравнения в комплексной форме
-й = гГ + ( — + уа>Л J (Z7 + LafTf);
uf = rfif + — + j(cok-cop) (Lfif+Lafif).
Для потокосцепления статора и ротора, имеем:
p = LT + La/Tf=La(ix + jiy) + Laf(iA+jiJi>y,
P/=k/ + LTf=Laf(ix+jiy) + La(ifc+ji^).
Скольжение:
(3.6)
(3.7)
* = ^ , (3.8) со
где бУр = Qpp - частота вращения ротора (р число пар полюсов).
Тогда для частоты тока (или напряжения) статора получим co = cop±cof\
±cof = со-сор.
При вращении поля, создаваемого токами возбуждения, относительно
ротора в положительном направлении (0f = sco->O) ротор вращается с
частотой ниже синхронной. При cof=sco = 0 ротор вращается синхронно, т.е.
соответствует синхронной машине. При перемене направления вращения поля,
создаваемого токами возбуждения, относительно ротора в сторону,
противоположную направлению вращения ротора, т.е. при cof=sco<0, частота
вращения ротора сор выше синхронной. Возможность работы в
установившемся режиме с частотой вращения ротора ниже и выше
синхронной, а также с синхронной частотой является важным достоинством
АСГ.
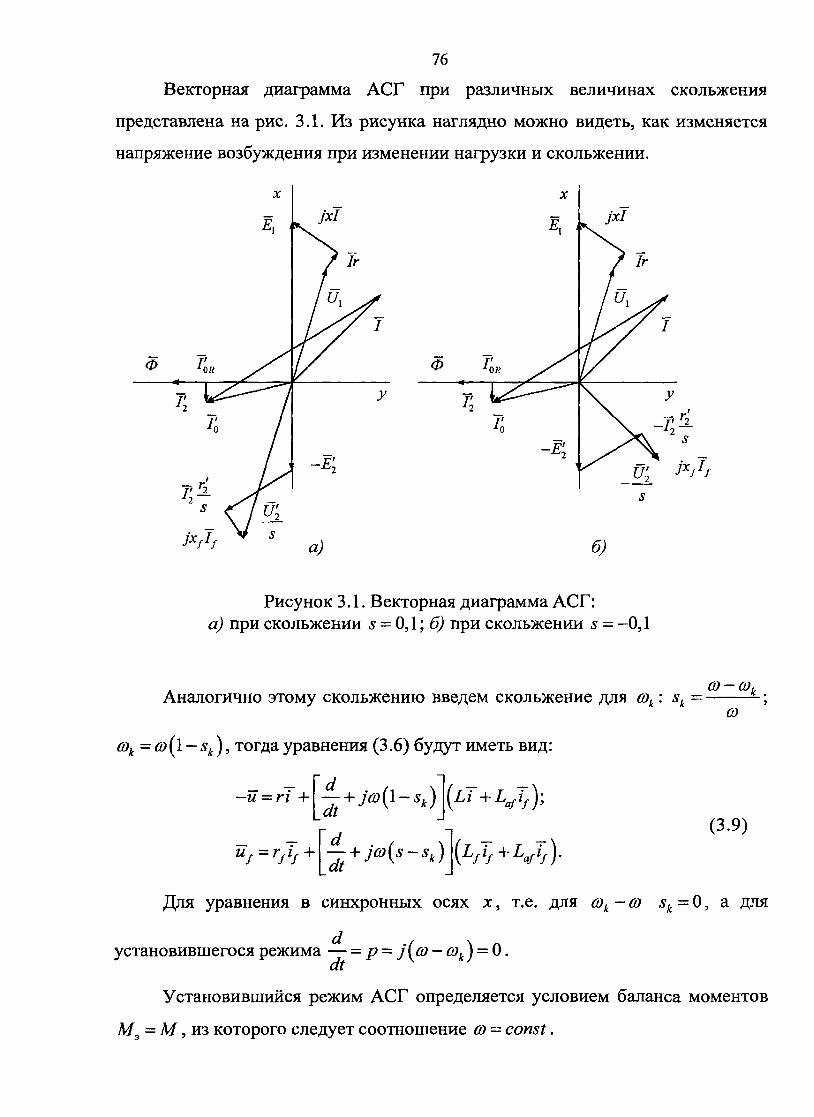
76
Векторная диаграмма АСГ при различных величинах скольжения
представлена на рис. 3.1. Из рисунка наглядно можно видеть, как изменяется
напряжение возбуждения при изменении нагрузки и скольжении.
б)
Рисунок 3.1. Векторная диаграмма АСГ: а) при скольжении s = 0,1; б) при скольжении s = -0,1
Аналогично этому скольжению введем скольжение для сок: sk = -со
cok=6)(l-sk), тогда уравнения (3.6) будут иметь вид:
d —и=п +
uf=rfif +
dt
' d_
dt
+ ja>(l-sk)
+ ja>(s-sk)
(Li +La/if);
{LfTf+LafTf\
(3.9)
Для уравнения в синхронных осях х, т.е. для сок-(о sk = 0, а для
установившегося режима — = р = j(a)-cok) = 0.
Установившийся режим АСГ определяется условием баланса моментов
М = М, из которого следует соотношение со = const.
77
(ЗЛО)
(3.11)
Для установившегося режима запишем уравнения, получаемые из
уравнений (3.9):
-u=ri +jco\Li +Lafij.J;
"/ =ГЛ+ Jm [Lflf + ^/z/ )•
В (3.10) при установившемся режиме все величины синусоидальны, т.е.
-U = rT + ja)(LI+LafTfy,
Uf=rfIf+JG)s(L/Tf+Laf7/).
Для решения (3.11) можно задаваться разными величинами, но нам
удобнее задаться: U -IzH, тогда:
I (г + zH + job) + ja)LafIf = 0; _ - , ч _ (3.12)
jcosLafI + If [jo)sLf +rf) = Uf,
где 0)L = x; a>Laf = xaf; coLf =xf; zH - вектор комплексного сопротивления
нагрузки.
С учетом этого получаем (осуществив переход к индуктивным
сопротивлениям) получим:
7 (г + zH+ jx) + jxafTf = 0;
Tjxafs + 7f [jxfs + rf) = Uf.
Полученная математическая модель позволяет представить основные
соотношения и показатели работы АСГ в установившемся режиме.
Из (3.13) определяем I и If:
(3.14)
(3.13)
/ = r + zH+jx jxaf
jxafs jxfs + rf
Преобразуем уравнение (3.14) к виду:
I = (r + zH+ jx)[rf + jxfs) + x2
afs (3.15)
78
- Uf(r + zu+ jx) If = - / V
4 / " J \ — или (r + zH+ jx)[rf + jxfs) + xafs
j = -Kpf (r + zH+ jx)(rf + jxfs) + x2
afs
Окончательно для установившегося режима АСГ ток в обмотке
возбуждения имеет вид [115]:
_ Uj.
I/~7 : \ i 77 — гт- (3.16)
\rf + JXfS) + XafSl\r + ZH+ JX)
Вектор ЭДС, индуктируемой в обмотке возбуждения,
Ef=-jTfxaf. (3.17)
Из (3.16) видно, что формула справедлива для АСГ и при s = 0 для СГ,
но xaf разное для асинхронизированного и синхронного генератора [14].
Для неявнополюсного СГ с /? = — « — : г 3
(3.18)
In m> ml ml 8 r- '
7Cpj2 71 no
где p - относительная длина обмотанной части полюса; Ъ — длина обмотанной
части полюсного деления; т — полюсное деление; Fm — МДС обмотки
возбуждения; Нт - напряженность магнитного поля; Вт — максимальная
индукция; ФтХ - магнитный поток обмотки возбуждения; ls - расчетная длина
генератора.
Е = ̂ Фт1щкш= - ^ , (3.19)
h xaf=Y = -J-MoMvldKeiicnWf = —> (3.20)
79
T.Q.wf=wM/p.
ДляАСГ:
Fmf=—h™fko6f\ НяХ = % ; Bml=Mo?f-, (3.21) np J J о 5
<t>mi-BmlTls; (3.22)
If~ nP5 " °f{Acn ( 3 - 2 4 )
Xaf{ACr) _ 3v2 (3.25)
Полученное отношение показывает отличие индуктивного
сопротивления xaf для АСГ и СГ.
3.1.2. Анализ установившегося режима работы
Для АСГ может быть определен такой же комплекс статических
характеристик, как и для синхронного генератора, с той разницей, что МДС
возбуждения, необходимая для обеспечения того или иного режима работы, в
АСГ создается многофазной обмоткой возбуждения при различных сочетаниях
токов в фазах в зависимости от углового положения 8 ротора. Последнее не
зависит от режима работы, а определяется действием регулятора Мэ в
противоположность синхронному генератору, у которого всегда д = 6 и
изменения углового положения ротора определяются изменениями режимов
работы как по активной, так и по реактивной мощностям. Указанное
обстоятельство обуславливает принципиальные различия в угловых
характеристиках синхронного и АС — генераторов. В синхронном генераторе
наклон угловой характеристики Мэ{в) зависит, в первую очередь, от режима
80
работы. В машине без регулирования возбуждения угловая характеристика
имеет вид синусоиды, т.е. ее наклон становится отрицательным при в>90°.
Использование в синхронном генераторе регулятора сильного действия
позволяет расширить устойчивый участок угловой характеристики до в ̂ 120°
[116].
Для АСГ зависимость Мэ(0) не является угловой характеристикой в
общепринятом смысле, т.е. величина в не определяет углового положения
ротора. Вид угловой характеристики АСГ Мэ(д) не зависит от режима работы,
а определяется выбранным законом регулирования в канале
электромагнитного момента. При наличии пропорционального регулирования
Мэ в функции 8 угловая характеристика Мэ{д) имеет в любом режиме
одинаковый наклон, зависящий от коэффициента регулирования [116].
3.1.3. Расчет параметров установившегося режима
1) Построение характеристик
— -jxajUf
(R + z„+ jx)(Rf + jx^ + x]/
U, j — 1 fi 27")
f Rf+jxfs + xlfs/{R + zH+jx)'
При построении внешней характеристики примем U^ = Ef.
При 1=0, сопротивление нагрузки zH -»оо, тогда:
U, J = I ;
f Rf+jx/ (3.28)
Xaf
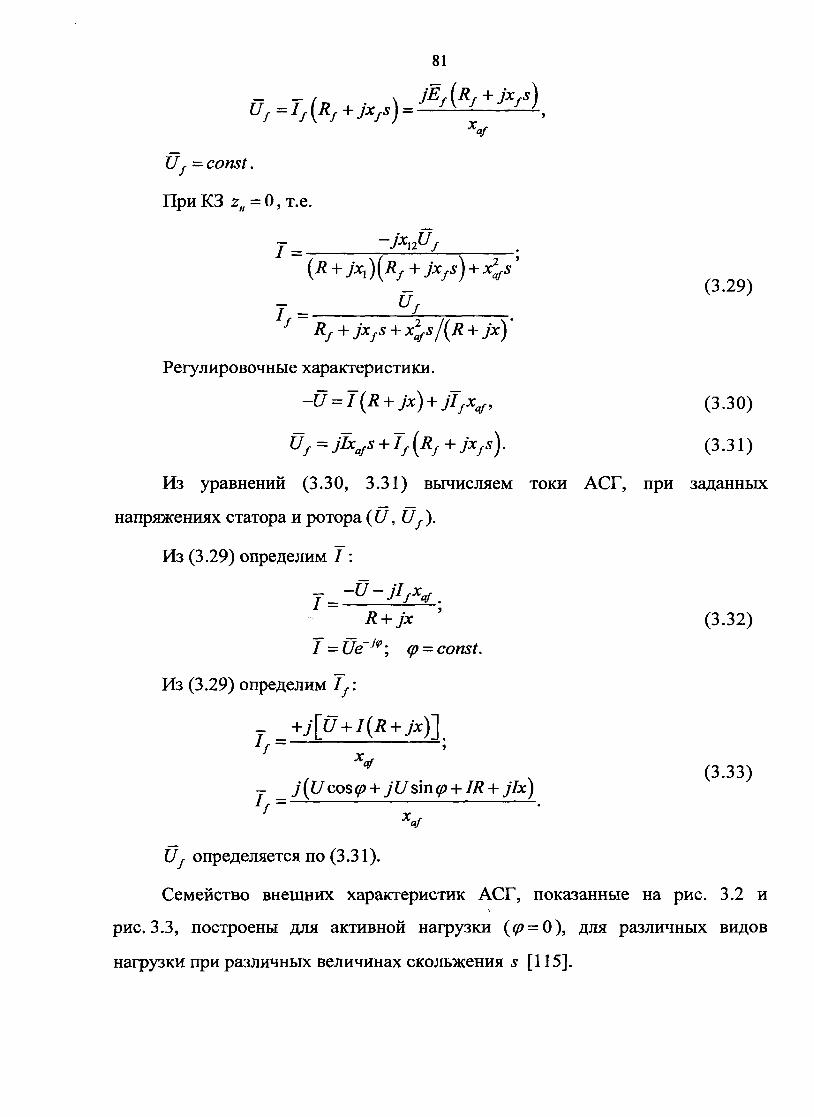
81
o,-T,(*,+jv)-*'l*'x+pJ
Xaf
Uf = const.
При КЗ zH = = 0, т.е.
7— _
T — V - D ,
-J'X12U/
jxx)[Rf+jxfs)-
L. ,V „ , ~2 / / „
4-*JjT
# \ *
(3.29)
Регулировочные характеристики.
-U = l(R + jx) + jTj.xaf, (3.30)
£7, = jJxafs + If (Rf + jxfs). (3.31)
Из уравнений (3.30, 3.31) вычисляем токи АСГ, при заданных
напряжениях статора и ротора (JJ, Uf).
Из (3.29) определим / :
I = -U-jIfxa/
R + jx ' (3.32)
I =Ue'JP; <p = const.
Из (3.29) определим If:
7 _+j[U + l(R + jx)]m
f ~ '
- j(Ucos<p +jU sirup+ IR + jIx) (3.33)
Xaf
Uf определяется no (3.31).
Семейство внешних характеристик АСГ, показанные на рис. 3.2 и
рис. 3.3, построены для активной нагрузки (#? = 0), для различных видов
нагрузки при различных величинах скольжения s [115].
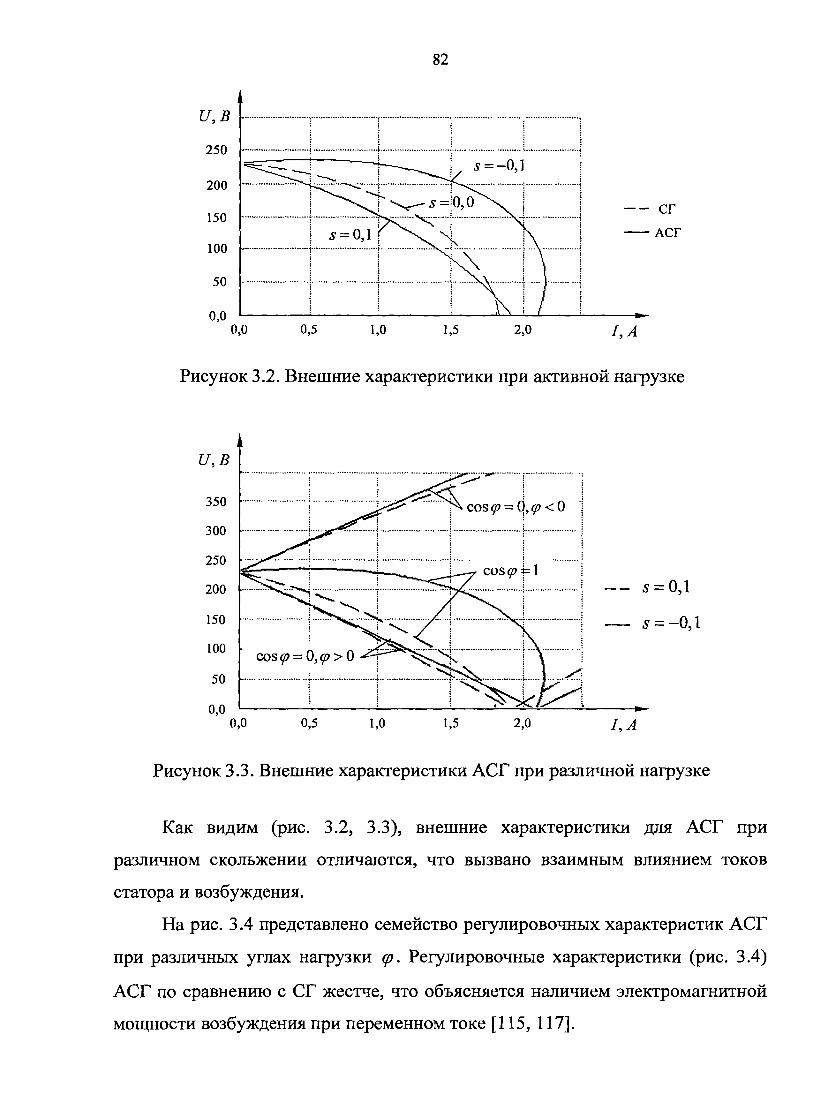
82
Рисунок 3.2. Внешние характеристики при активной нагрузке
U, В
— 5 = 0,1
— s = -0,1
Рисунок 3.3. Внешние характеристики АСГ при различной нагрузке
Как видим (рис. 3.2, 3.3), внешние характеристики для АСГ при
различном скольжении отличаются, что вызвано взаимным влиянием токов
статора и возбуждения.
На рис. 3.4 представлено семейство регулировочных характеристик АСГ
при различных углах нагрузки ср. Регулировочные характеристики (рис. 3.4)
АСГ по сравнению с СГ жестче, что объясняется наличием электромагнитной
мощности возбуждения при переменном токе [115, 117].
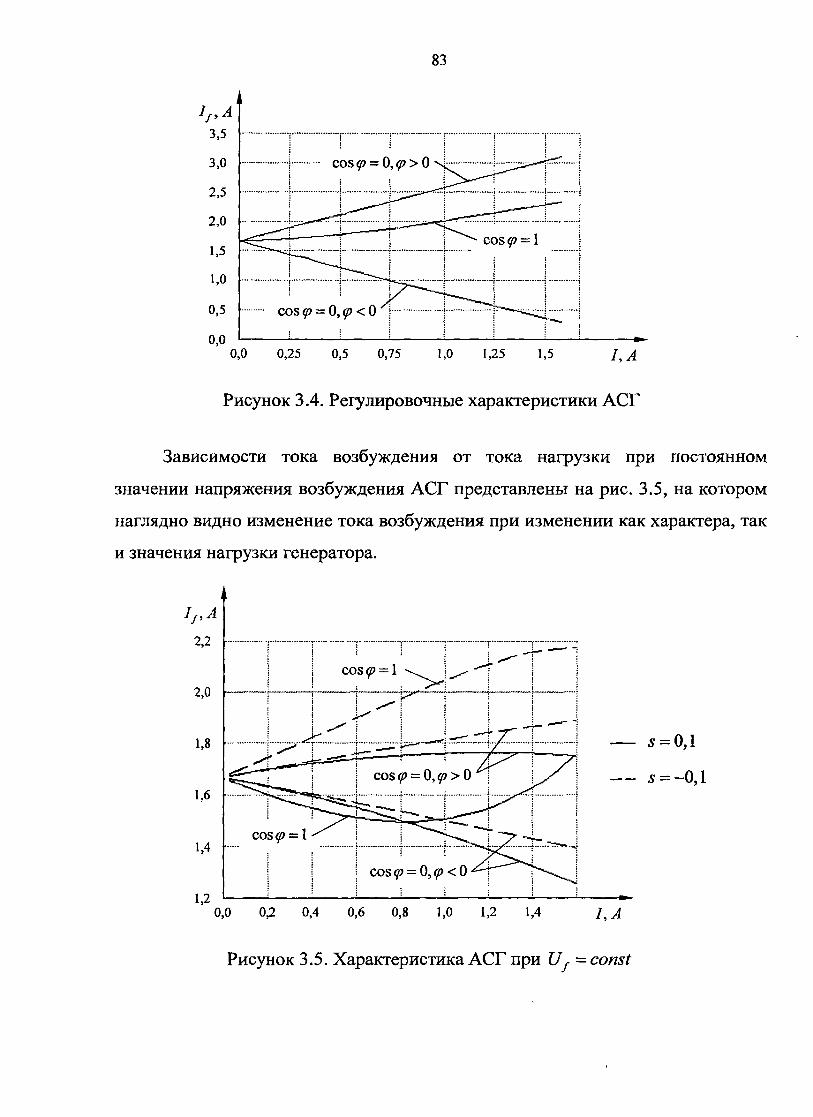
83
0,0 0,25 0,5 0,75 1,0 1,25 1,5 I, A
Рисунок 3.4. Регулировочные характеристики АСГ
Зависимости тока возбуждения от тока нагрузки при постоянном
значении напряжения возбуждения АСГ представлены на рис. 3.5, на котором
наглядно видно изменение тока возбуждения при изменении как характера, так
и значения нагрузки генератора.
0,0 0,2 0,4 0,6 0,8 1,0 1,2 1,4 LA
Рисунок 3.5. Характеристика АСГ при Uf = const
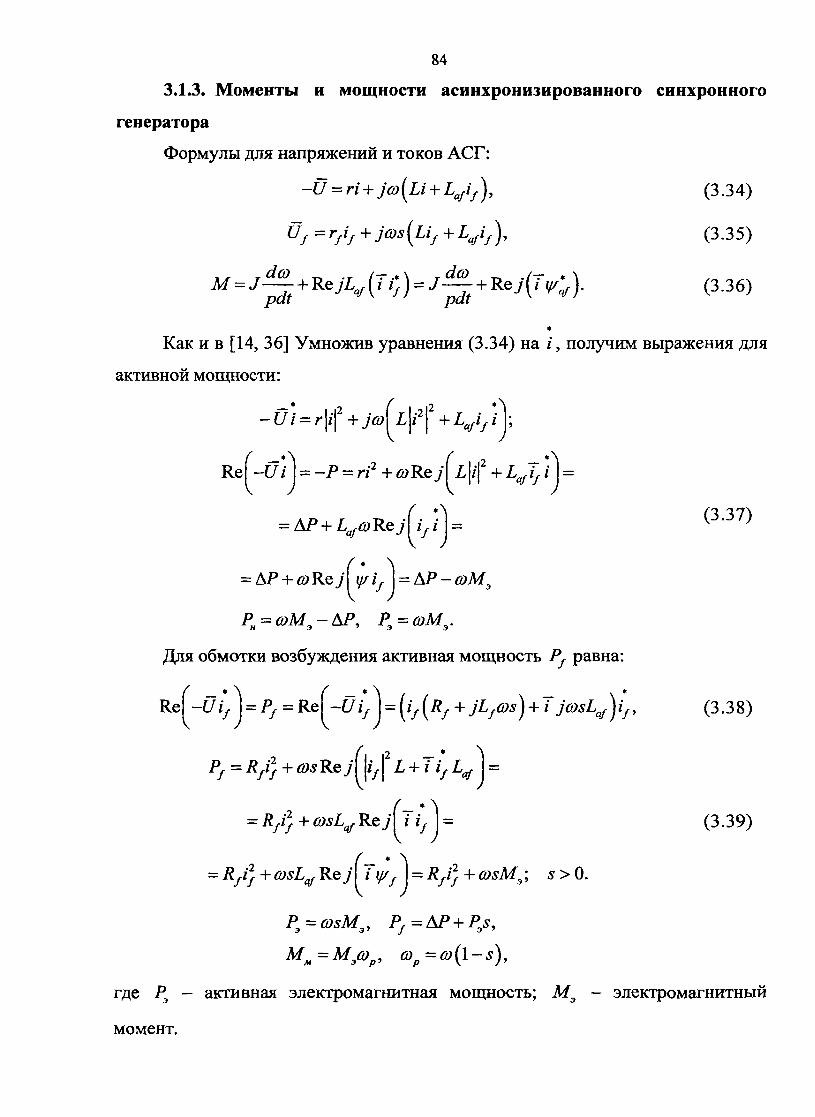
84
3.1.3. Моменты и мощности асинхронизированного синхронного
генератора
Формулы для напряжений и токов АСГ:
-U = ri + ju)(Li + La/if), (3.34)
V/ = r/ff + Jm {Lif + Х«А )' (3 -35)
dco dco M=J^t
+RQM4h^MT<)- (3.36)
Как и в [14, 36] Умножив уравнения (3.34) на /, получим выражения для
активной мощности:
+ Lafifi -Ui = r\i\2+jo)\L\i:
Re -Ui = -P = rr + mRejl L\i\ + Lafif i
= AP + La/a)Rej ifi = (3.37)
Re
= AP + coRej\ y/if = АР-о)Мэ
Ри = соМэ-АР, Рэ = <аМэ.
Для обмотки возбуждения активная мощность Pf равна:
-Uij. J = Pf = Re\-Ui f J = (if [Rf + jLfo)s) + T jcosLaf}if,
Pf=R/f+mRej\\if\2L + TifLaf) =
= Rfi2
f + cosL^ Re у i if =
= Rfij + cusLaf Re у i i//f = Rfij + cosM3\ s > 0.
P3=cosM3, Pf=AP + P3s,
(3.38)
(3.39)
Мм=Мэб>р, CO. = ct)(l-s),
где Рэ - активная электромагнитная мощность; Мэ — электромагнитный
момент.
85
Мрар =РМ= М3сор =M,co(l-s) = PMs =
= Мэм-Мэмт = (Рн+АР)=^ (3.)
= Pll + AP-P/ + AP/=PH-P/+AP-APf.
При этом, так же как и в асинхронной машине без возбуждения, имеют
место следующие соотношения между мощностью, передаваемой от статора к
ротору, равной, при пренебрежении потерями, мощности Р, и механической
мощностью на валу машины Рм:
Р =Р-Р•
Р&0)Мэ\
Pf=sQ)M3 = sPD; ( 3 , 4 0 )
т.е. РМ<Р при s > О и сор<со.
Это определяет высокую экономичность регулирования частоты
выходного напряжения по сравнению с механическим способом
(дифференциальные редукторы, гидромеханические устройства) и
электрическим - ПЧ в цепи статора генератора (выпрямление и
инвертирования полной выходной мощности). Мощность ПЧ меньше полной
мощности S АСЭ. Она определяется в первом приближении произведением S
и предельного значения абсолютной величины скольжения \smJ\ [115].
Анализируя полученные выражения для момента и мощности, замечаем,
что имеет место не только преобразовании энергии из одного вида в другой, но
также и передача энергии из одной обмотки в другую, обусловленная силами
электромагнитного происхождения, создающими вращающий момент.
Преобразование и передача энергии связаны с потерями в различных частях
генератора.
Таким образом, из анализа уравнений для мощностей и моментов можно
сделать вывод о том, что при принятых допущениях обобщенная
математическая модель АСГ в полной мере отражает основные физические
процессы преобразования энергии в реальной машине.
86
3.2. Методика измерения и построения характеристик генератора
Основная задача построения внешних характеристик ACT — дать
представление о качестве модели объекта и о том, с какой полнотой
воспроизведены в ней основные элементы системы и закономерности
происходящих процессов. Для тестирования модели генератора и системы
автоматического регулирования возбуждения выбраны следующие режимы;
- включение и отключение 50 % и 100 % нагрузки, разделяемой по виду
нагрузки на активную, активно-индуктивную, активно-емкостную и
смешанную;
- внезапное короткое замыкание на выводах генератора;
- вышеперечисленные режимы при различной частоте вращения
приводного двигателя.
Задачи, поставленные выше, были выполнены при помощи созданной и
зарегистрированной компьютерной программы «Программа расчета
переходных процессов в синхронном генераторе» и «Программа расчета
динамических режимов работы асинхронизированного синхронного генератора
с системой стабилизации параметров на базе нечеткой логики» [118, 119].
Методика измерения и построения характеристик заключалась в
построении исследуемой виртуальной модели, состоящей из основных
элементов схемы работы АСЭ и из измерительно-регистрирующих элементов
библиотеки Simulink. Параметры электрических элементов схемы (напряжения,
частоты системы возбуждения, сопротивления и индуктивности обмоток)
получены в ходе измерений на существующей универсальной машине
перемененного тока.
По результатам измерений, для каждого набора параметров строились
графики зависимостей измеряемых величин.
Имитационная модель для определения характеристик генератора
содержит асинхронизированный синхронный генератор ASG, источник
напряжения возбуждения, нагрузку. В качестве АСГ использовалась модель,
созданная на основании уравнений (1.10). В качестве источника возбуждения
87
выступает источник трехфазного напряжения. Нагрузка выполнена в виде
различного вида потребителей.
Модель работает следующим образом. К ротору прикладывается момент,
полученный как разность между заданным моментом и моментом,
пропорциональным частоте вращения. Это дает возможность стабилизировать
частоту вращения при варьировании электрической нагрузки генератора. К
трехфазной обмотке ротора прикладывается напряжение от трехфазного
инвертора напряжения, созданного на базе IGBT-транзисторов, при этом в
роторе создается вращающийся относительно ротора магнитный поток,
который индуктирует в статоре ЭДС. Значение и частота этой ЭДС
пропорциональны алгебраической сумме частот вращения ротора и вращения
магнитного потока относительно ротора. Под действием ЭДС через обмотки
статора и сопротивления нагрузки проходит ток, через который энергия
передается от генератора в нагрузку. Магнитный поток, созданный током
нагрузки в обмотке статора, алгебраически складывается с магнитным потоком
ротора, так что ЭДС в статоре создается суммарным потоком.
Особенность АСГ в том, что ЭДС индуктируется и в роторе,
вычитываясь из напряжения возбуждения, так что ток возбуждения проходит
под действием этой разности, а не только от источника возбуждения, как в
синхронном генераторе. Эта особенность существенно отличает данный
генератор от генераторов синхронного и асинхронного типа.
Прототипом для задания параметров принята универсальная машина
переменного тока мощностью 200 Вт, номинальным напряжением 230 В,
50 Гц. В процессе исследования варьировались напряжение и частота
возбуждения, частота вращения и вид подключаемой нагрузки.
Контролировались ток возбуждения, вращающий момент, ток нагрузки,
частота и амплитуда напряжения.
Основной проблемой при построении динамической модели является
идентификация ее параметров. Часть параметров (такие, например, как
активные сопротивления обмоток) находятся из паспортных данных на
88
генератор. В нашем случае технические параметры на генератор неизвестны, в
связи с чем, проведена серия экспериментов для определения необходимых
неизвестных параметров. Также выполнен расчет исследуемого генератора для
проверки адекватности полученных результатов. Методика расчета
универсальной машины приведена в приложении А [120, 121].
3.3. Электромеханические характеристики автономной системы
электроснабжения
Все представленные характеристики для АСГ рассчитаны при
постоянной частоте вращения, равной п = 1350 -J- 1650 об/мин.,
п0 = рпп = 2700 ч- 3300 об/мин, переменном трехфазном возбуждении с
а>-со со частотой /3=5Гц, s = - = 0,1, со =—— = 314 рад/с. и отключенной
со l-s
системе регулирования возбуждения. Для синхронного генератора
характеристики построены при постоянной частоте вращения п = 1500 об/мин.
3.3.1. Электромеханические характеристики без системы АРВ
Отклонения напряжения и частоты при установившемся режиме работы
важны, так как характеризуют номинальные показатели системы
электроснабжения. Стабильность поддержания в установившихся режимах
напряжения и частоты обеспечивается системой регулирования возбуждения
АСГ и регулятором частоты приводного двигателя.
Самыми распространенными для энергетических установок являются
режимы, связанные с изменением параметров нагрузки. П р и неаварийном
режиме работы АСЭ предельным случаем можно считать 100 % изменение
нагрузки. В таких режимах происходят значительные отклонения напряжения
и частоты от номинальных значений [122, 123].
На рис . 3.6 представлены осциллограммы напряжения и тока статора
АСГ при включении на номинальную нагрузку (/era = 1 , 9 5 с ) (cos<p = l ) без
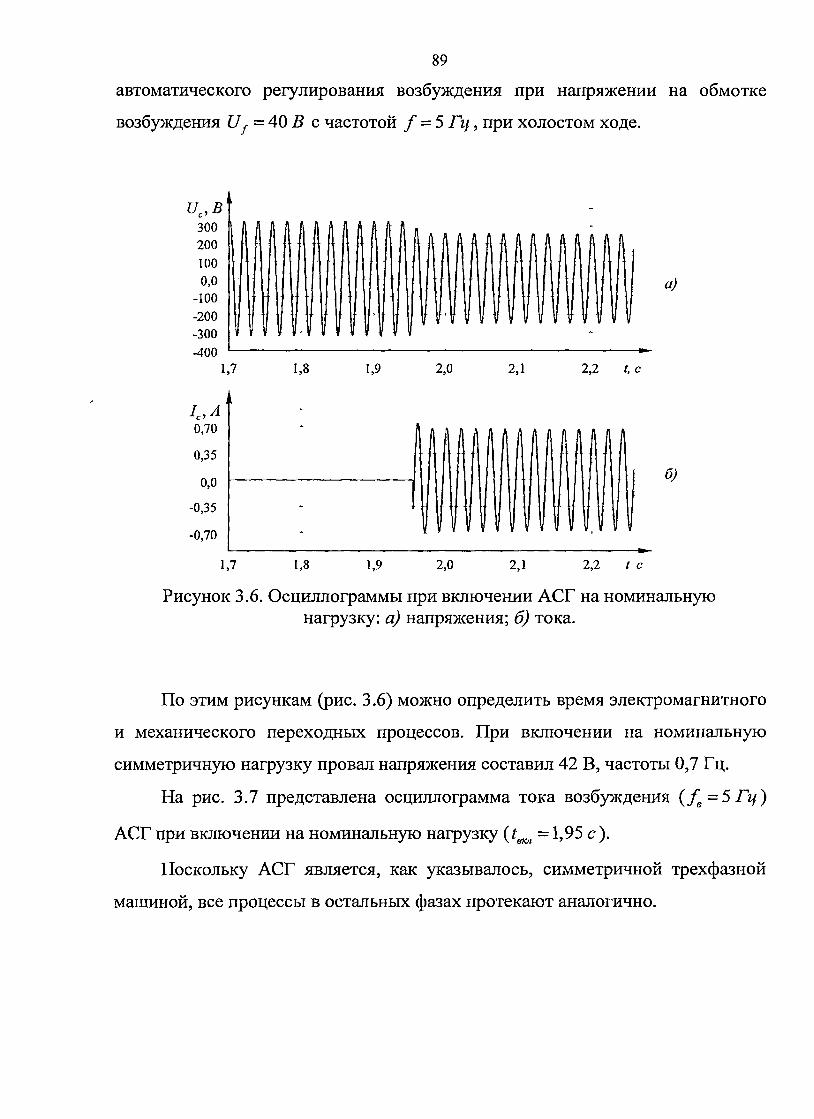
89
автоматического регулирования возбуждения при напряжении на обмотке
возбуждения Uf = 40В с частотой f -5 Гц, при холостом ходе.
ис,в
а)
-400
1С,А 0,70
0,35
0,0
-0,35
-0,70
1,7 1,8 1,9 2,0 2,1 2,2 t, с
б)
1,7 1,8 1,9 2,0 2,1 2,2 / с
Рисунок 3.6. Осциллограммы при включении АСГ на номинальную нагрузку: а) напряжения; б) тока.
По этим рисункам (рис. 3.6) можно определить время электромагнитного
и механического переходных процессов. При включении на номинальную
симметричную нагрузку провал напряжения составил 42 В, частоты 0,7 Гц.
На рис. 3.7 представлена осциллограмма тока возбуждения (/в=5Гц)
АСГ при включении на номинальную нагрузку (teKJl = 1,95 с ).
Поскольку АСГ является, как указывалось, симметричной трехфазной
машиной, все процессы в остальных фазах протекают аналогично.
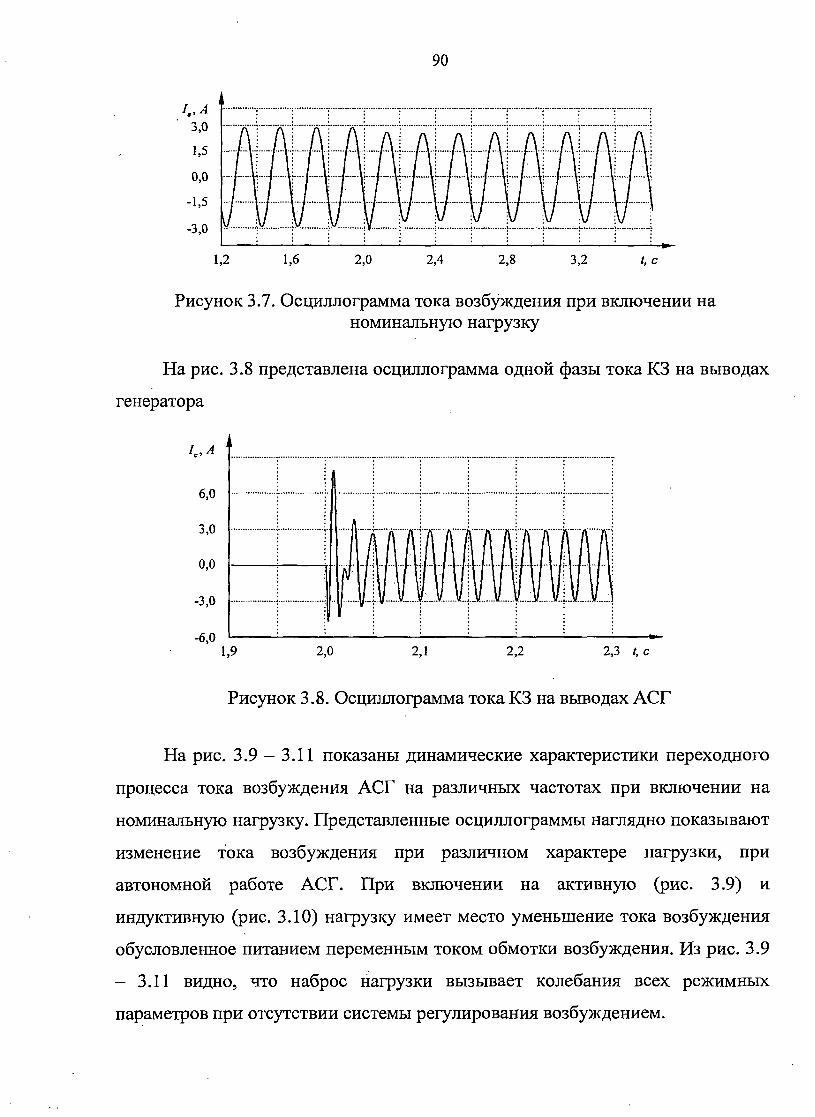
90
I., A
Рисунок 3.7. Осциллограмма тока возбуждения при включении на номинальную нагрузку
На рис. 3.8 представлена осциллограмма одной фазы тока КЗ на выводах
генератора
IC,A
6,0
3,0
0,0
-3,0
-6,0 1,9 2,0 2,1 2,2 2,3 t,c
Рисунок 3.8. Осциллограмма тока КЗ на выводах АСГ
На рис. 3.9 - 3.11 показаны динамические характеристики переходного
процесса тока возбуждения АСГ на различных частотах при включении на
номинальную нагрузку. Представленные осциллограммы наглядно показывают
изменение тока возбуждения при различном характере нагрузки, при
автономной работе АСГ. При включении на активную (рис. 3.9) и
индуктивную (рис. 3.10) нагрузку имеет место уменьшение тока возбуждения
обусловленное питанием переменным током обмотки возбуждения. Из рис. 3.9
- 3.11 видно, что наброс нагрузки вызывает колебания всех режимных
параметров при отсутствии системы регулирования возбуждением.
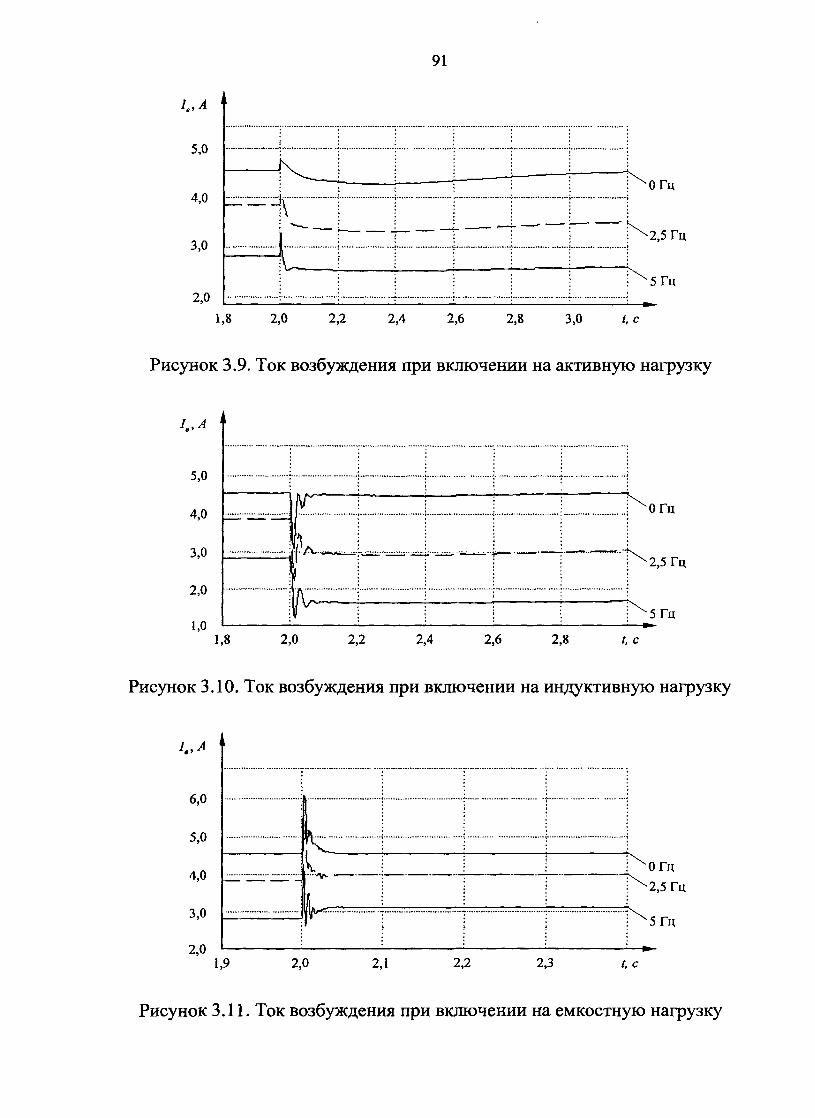
91
I., Л "
5,0
4,0
3,0
2,0
TJ-!\
t : ^-огц
N2,5 Гц
: 5 ГЦ
1,8 2,0 2,2 2,4 2,6 2,8 3,0 f, с
Рисунок 3.9. Ток возбуждения при включении на активную нагрузку
1.,л
0 Гц
-2,5 Гц
•5 Гц
2,4 2,6 2,8 t, с
Рисунок 3.10. Ток возбуждения при включении на индуктивную нагрузку
'..л "
6,0
5,0
4,0
3,0
2,0
к
1,9 2,0 2,1 2,2 2,3
: 0 Гц
Т ^ 2,5 Гц
•5 Гц
t,c
Рисунок 3.11. Ток возбуждения при включении на емкостную нагрузку
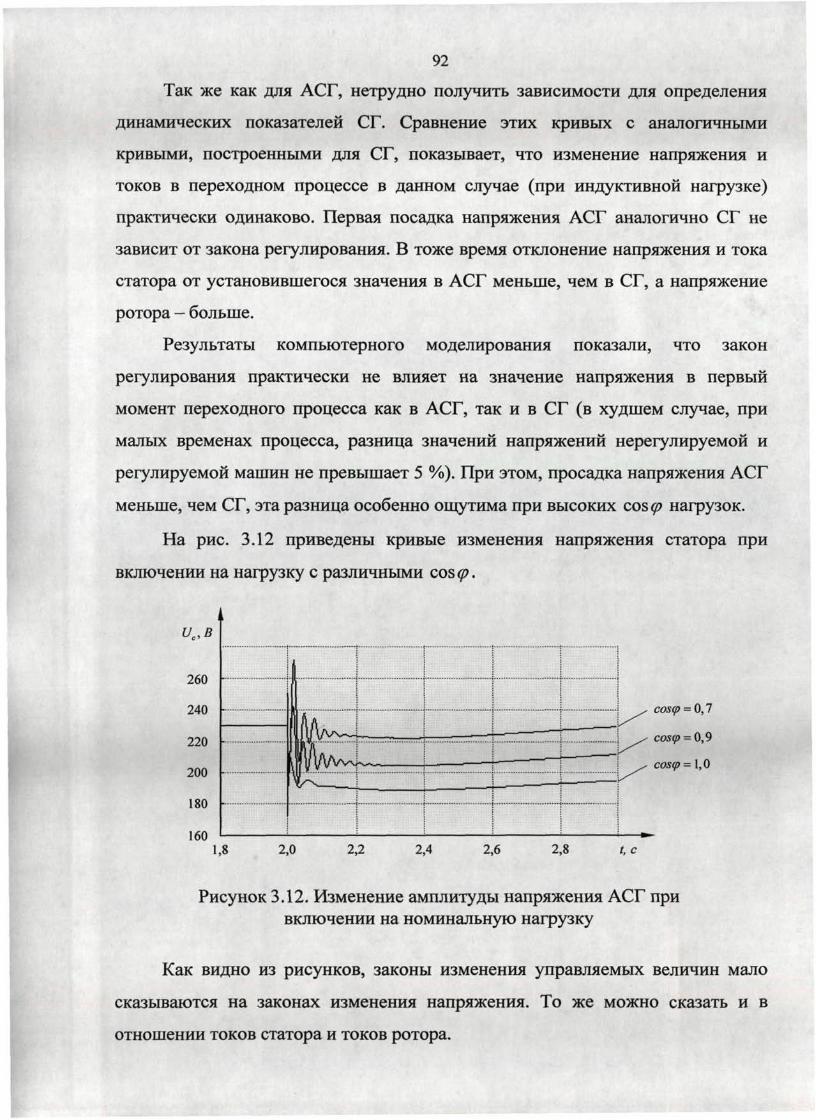
92
Так же как для АСГ, нетрудно получить зависимости для определения
динамических показателей СГ. Сравнение этих кривых с аналогичными
кривыми, построенными для СГ, показывает, что изменение напряжения и
токов в переходном процессе в данном случае (при индуктивной нагрузке)
практически одинаково. Первая посадка напряжения АСГ аналогично СГ не
зависит от закона регулирования. В тоже время отклонение напряжения и тока
статора от установившегося значения в АСГ меньше, чем в СГ, а напряжение
ротора - больше.
Результаты компьютерного моделирования показали, что закон
регулирования практически не влияет на значение напряжения в первый
момент переходного процесса как в АСГ, так и в СГ (в худшем случае, при
малых временах процесса, разница значений напряжений нерегулируемой и
регулируемой машин не превышает 5 %). При этом, просадка напряжения АСГ
меньше, чем СГ, эта разница особенно ощутима при высоких cos q> нагрузок.
На рис. 3.12 приведены кривые изменения напряжения статора при
включении на нагрузку с различными cos^?.
ие,в
1,8 2,0 2,2 2,4 2,6 2,8 t, с
Рисунок 3.12. Изменение амплитуды напряжения АСГ при включении на номинальную нагрузку
Как видно из рисунков, законы изменения управляемых величин мало
сказываются на законах изменения напряжения. То же можно сказать и в
отношении токов статора и токов ротора.
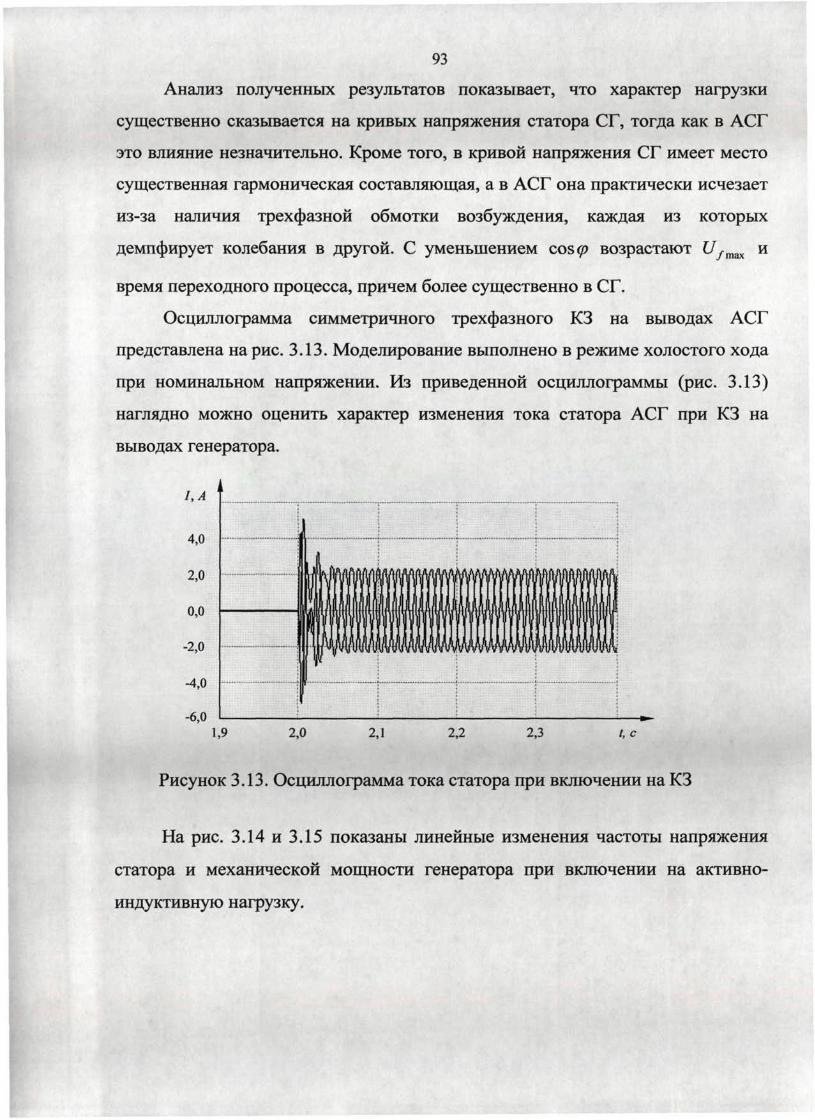
93
Анализ полученных результатов показывает, что характер нагрузки
существенно сказывается на кривых напряжения статора СГ, тогда как в АСГ
это влияние незначительно. Кроме того, в кривой напряжения СГ имеет место
существенная гармоническая составляющая, а в АСГ она практически исчезает
из-за наличия трехфазной обмотки возбуждения, каждая из которых
демпфирует колебания в другой. С уменьшением cos#> возрастают Ufmax и
время переходного процесса, причем более существенно в СГ.
Осциллограмма симметричного трехфазного КЗ на выводах АСГ
представлена на рис. 3.13. Моделирование выполнено в режиме холостого хода
при номинальном напряжении. Из приведенной осциллограммы (рис. 3.13)
наглядно можно оценить характер изменения тока статора АСГ при КЗ на
выводах генератора.
U А
4,0
2,0
0,0
-2,0
-4,0
-6,0 1,9 2,0 2,1 2,2 2,3 /, с
Рисунок 3.13. Осциллограмма тока статора при включении на КЗ
На рис. 3.14 и 3.15 показаны линейные изменения частоты напряжения
статора и механической мощности генератора при включении на активно-
индуктивную нагрузку.
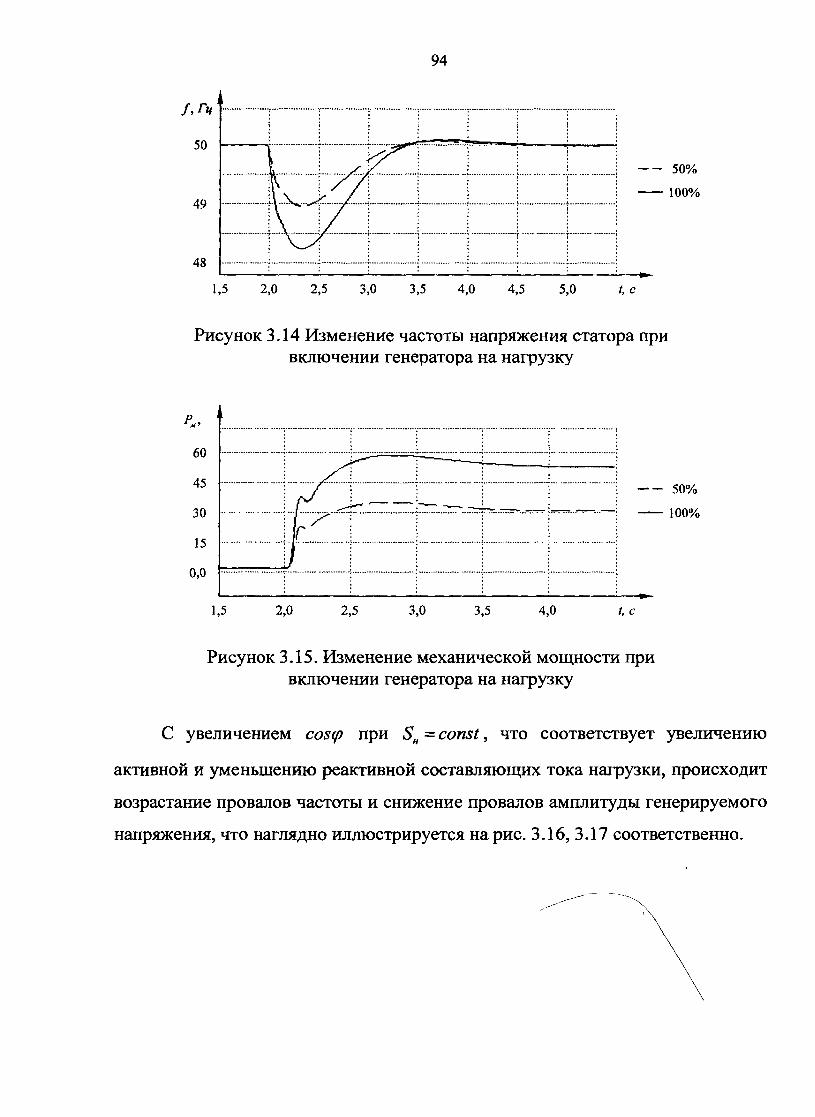
94
50
49
48
1,5 2,0 2,5 3,0 3,5 4,0 4,5 5,0 /, с
Рисунок 3.14 Изменение частоты напряжения статора при включении генератора на нагрузку
1,5 2,0 2,5 3,0 3,5 4,0 t, с
Рисунок 3.15. Изменение механической мощности при включении генератора на нагрузку
С увеличением cos<p при SH = const, что соответствует увеличению
активной и уменьшению реактивной составляющих тока нагрузки, происходит
возрастание провалов частоты и снижение провалов амплитуды генерируемого
напряжения, что наглядно иллюстрируется на рис. 3.16, 3.17 соответственно.
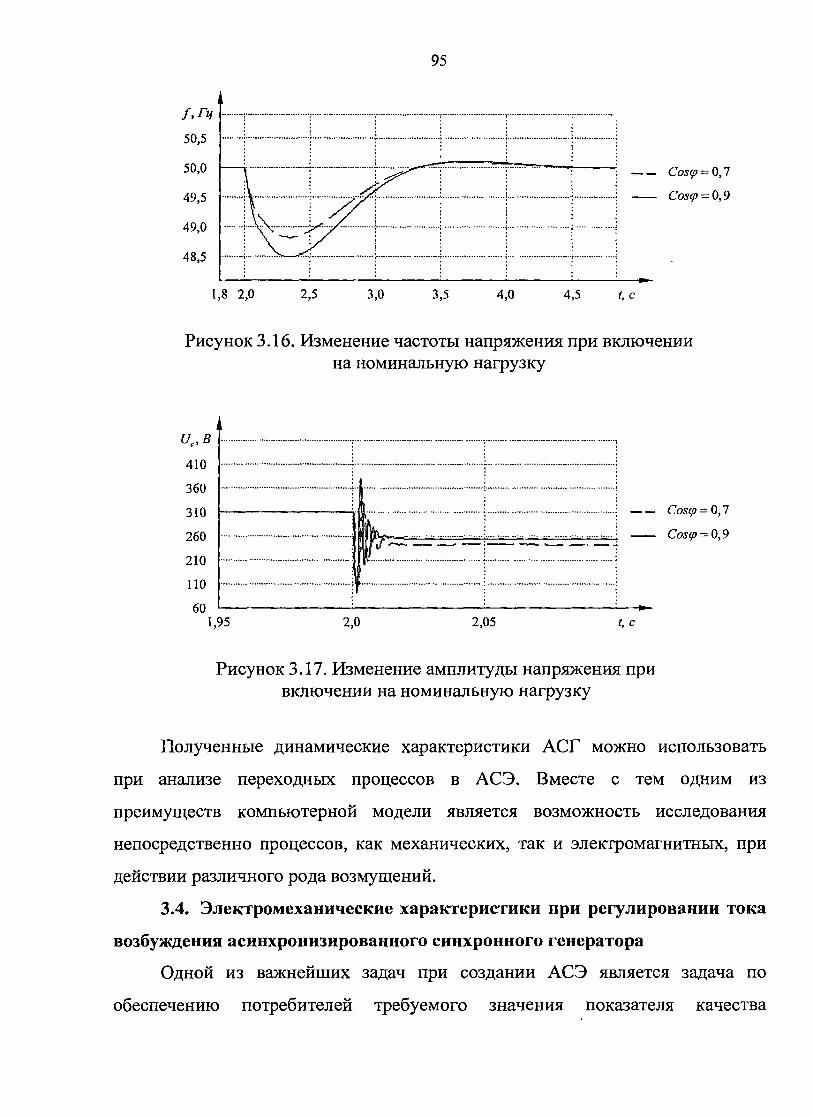
95
Coscp-0,1
Cos(p = 0,9
1,8 2,0 2,5
Рисунок 3.16. Изменение частоты напряжения при включении на номинальную нагрузку
и,, в 410
360
310
260
210
ПО
60 * -̂
Cos<p = 0,7
Cos<p = 0,9
1,95 2,0 2,05 t, с
Рисунок 3.17. Изменение амплитуды напряжения при включении на номинальную нагрузку
Полученные динамические характеристики АСГ можно использовать
при анализе переходных процессов в АСЭ. Вместе с тем одним из
преимуществ компьютерной модели является возможность исследования
непосредственно процессов, как механических, так и электромагнитных, при
действии различного рода возмущений.
3.4. Электромеханические характеристики при регулировании тока
возбуждения асинхронизированного синхронного генератора
Одной из важнейших задач при создании АСЭ является задача по
обеспечению потребителей требуемого значения показателя качества
96
электрической энергии (ПКЭ). Данное требование обусловлено
нестабильностью частоты приводного двигателя так и непредсказуемым
характером изменения нагрузки. Для решения данной задачи необходимо
стабилизировать частоту и амплитуду генерируемого напряжения. Как
показано ранее, одним из наиболее перспективных способов стабилизации
выходного напряжения и частоты является применение системы АРВ
реализованная на основе НЛ.
Большинство потребителей имеют активно-индуктивный характер
потребляемого тока. Изготовители генераторов вводят дополнительную
положительную обратную связь по току для компенсации падения напряжения
на нагрузке, при этом с ростом тока в нагрузке система регулирования
возбуждением генератора повышает выходное напряжение. Однако
инверторные источники, как потребители, имеют емкостной характер, поэтому
с ростом тока в нагрузке напряжение возрастает, а наличие положительной
обратной связи по току приводит к еще большему росту напряжения.
Результатом чего, из-за перенапряжений может выйти из строя инвертор или
сам генератор. Данное противоречие успешно решается системой АРВ на базе
НЛ.
С ростом потребляемого тока действующее значение напряжения
генератора возрастает, причем приращение напряжения зависит от
соотношения потребляемой и номинальной мощности генератора.
Напряжение генератора одинаково изменяется в зависимости от частот
вращения ротора и возбуждения с коэффициентом dU/df. Из этого следует,
что желаемая частота напряжения генератора может быть получена
регулированием частоты вращения ротора, регулированием частоты вращения
магнитного поля возбуждения относительно ротора или их совместным
регулированием. Поскольку регулирование частоты вращения ротора
генератора в узком диапазоне вращения близкой к требуемой частоте является
сложной задачей, то компенсацию изменения частоты вращения ротора
наиболее целесообразно возложить на систему АРВ генератора.
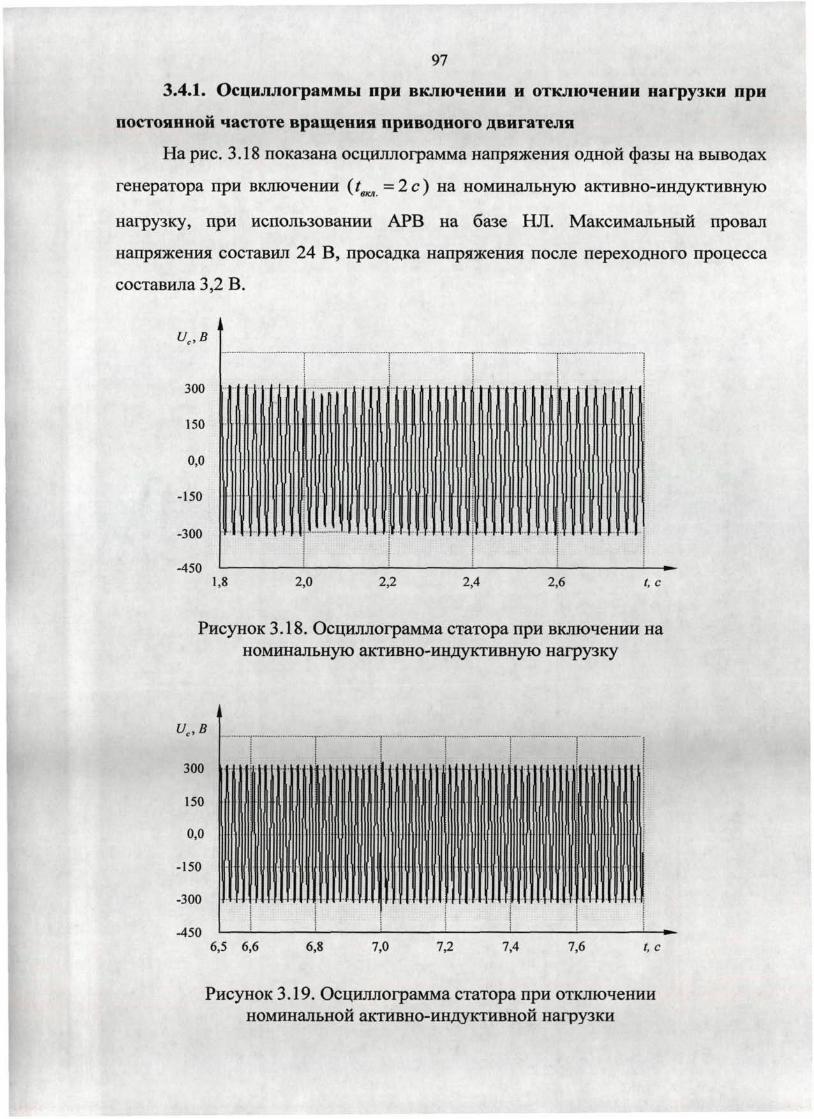
97
3.4.1. Осциллограммы при включении и отключении нагрузки при
постоянной частоте вращения приводного двигателя
На рис. 3.18 показана осциллограмма напряжения одной фазы на выводах
генератора при включении (teiai = 2 с) на номинальную активно-индуктивную
нагрузку, при использовании АРВ на базе НЛ. Максимальный провал
напряжения составил 24 В, просадка напряжения после переходного процесса
составила 3,2 В.
ис,в "
Рисунок 3.18. Осциллограмма статора при включении на номинальную активно-индуктивную нагрузку
Рисунок 3.19. Осциллограмма статора при отключении номинальной активно-индуктивной нагрузки
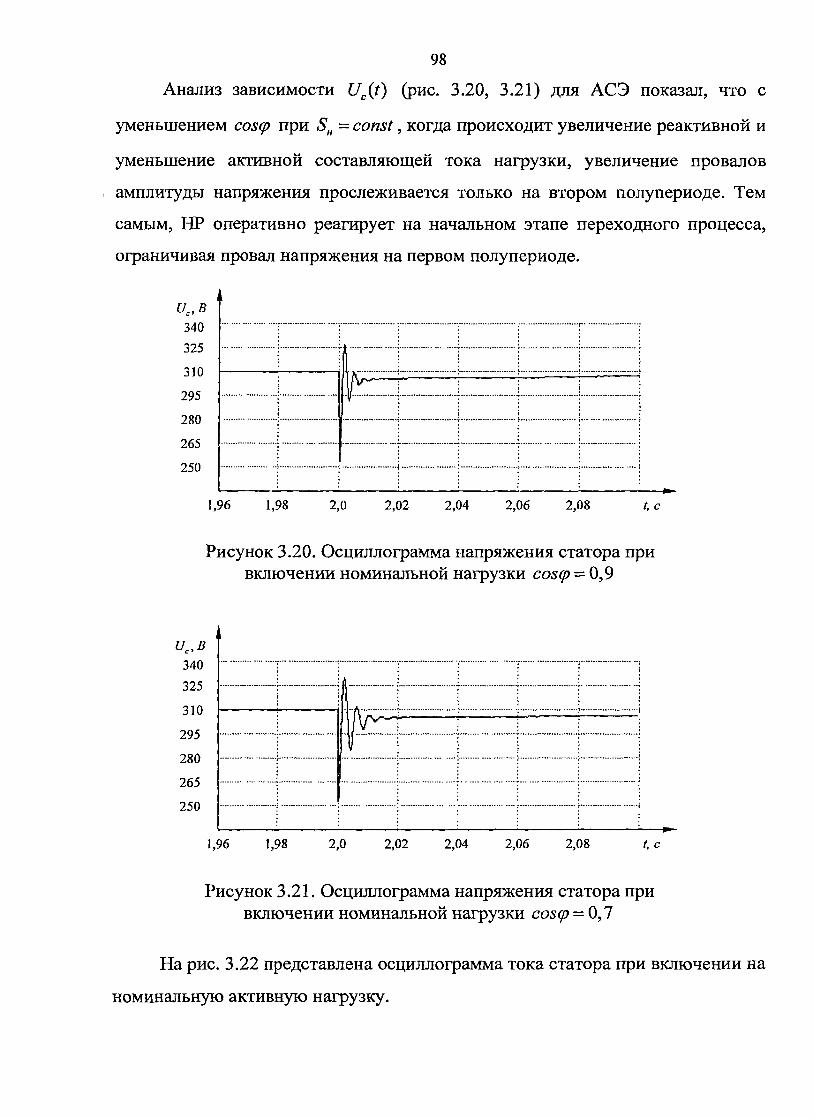
98
Анализ зависимости Uc{t) (рис. 3.20, 3.21) для АСЭ показал, что с
уменьшением coscp при SH = const, когда происходит увеличение реактивной и
уменьшение активной составляющей тока нагрузки, увеличение провалов
амплитуды напряжения прослеживается только на втором полупериоде. Тем
самым, HP оперативно реагирует на начальном этапе переходного процесса,
ограничивая провал напряжения на первом полупериоде.
и „в 340
325
310
295
280
265
250
1,96 1,98 2,0 2,02 2,04 2,06 2,08 /, с
Рисунок 3.20. Осциллограмма напряжения статора при включении номинальной нагрузки coscp = 0,9
ие,в 340
325
310
295
280
265
250
1,96 1,98 2,0 2,02 2,04 2,06 2,08 t, с
Рисунок 3.21. Осциллограмма напряжения статора при включении номинальной нагрузки coscp = 0,7
На рис. 3.22 представлена осциллограмма тока статора при включении на
номинальную активную нагрузку.
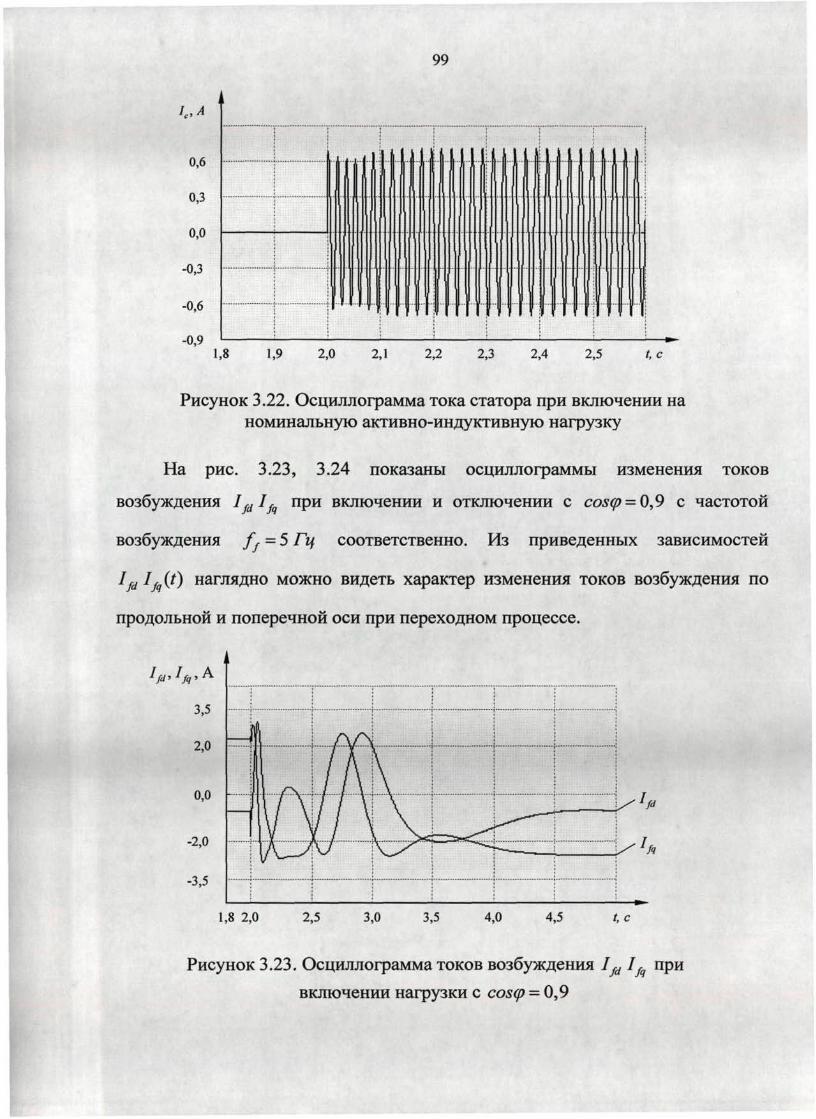
99
1е.Л
1,8 1,9 2,0 2,1 2,2 2,3 2,4 2,5 t,c
Рисунок 3.22. Осциллограмма тока статора при включении на номинальную активно-индуктивную нагрузку
На рис. 3.23, 3.24 показаны осциллограммы изменения токов
возбуждения IjdIfq при включении и отключении с cosq> = 0,9 с частотой
возбуждения ff = 5 Гц соответственно. Из приведенных зависимостей
IfdIfq(t) наглядно можно видеть характер изменения токов возбуждения по
продольной и поперечной оси при переходном процессе.
1
3,5
2,0
0,0
-2,0
-3,5
j | /\ /\
1 1 \ \ \ \ 1 \
/ / v \ : "1 :
1 \ Т><^^.„"^Х^^ - Г
\/ л / ^^^— . : /-'&
1,8 2,0 2,5 3,0 3,5 4,0 4,5 t, с
Рисунок 3.23. Осциллограмма токов возбуждения Ifd 1'f при
включении нагрузки с cosqy = 0,9
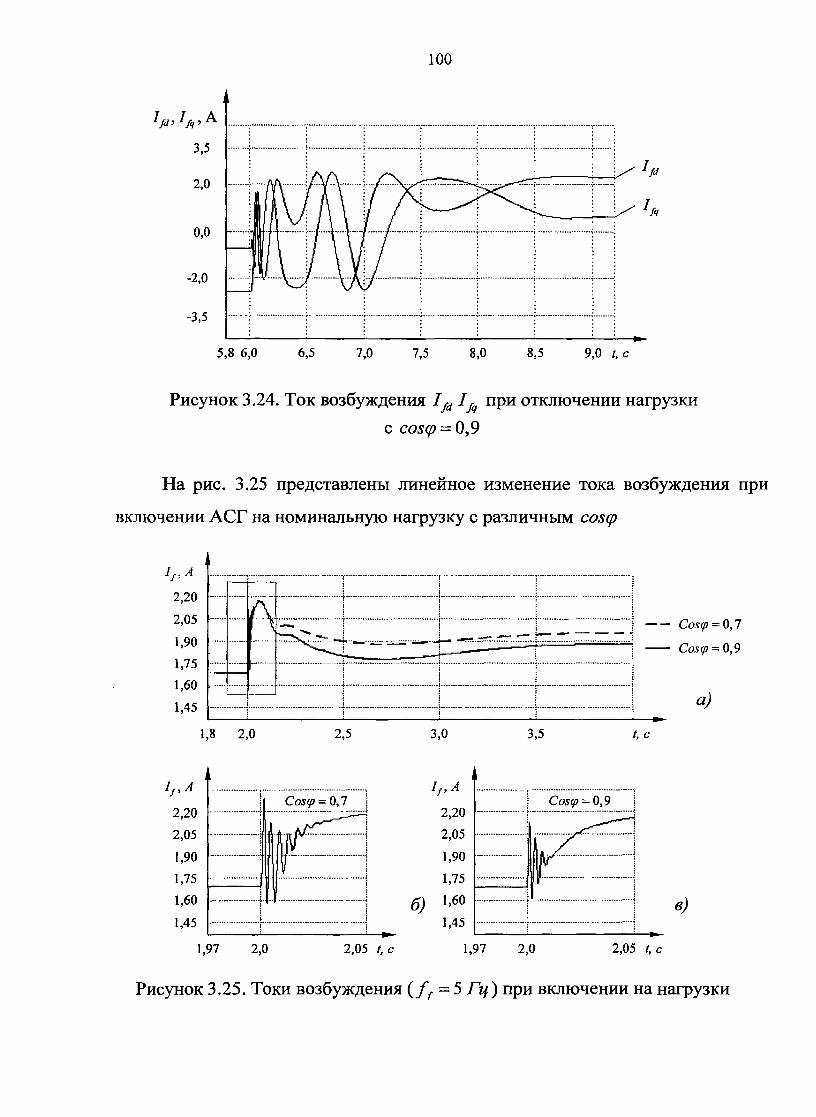
100
5,8 6,0 6,5 7,0 7,5 8,0 8,5 9,0 t, с
Рисунок 3.24. Ток возбуждения Ifd Ifq при отключении нагрузки
с cos<p = 0,9
На рис. 3.25 представлены линейное изменение тока возбуждения при
включении АСГ на номинальную нагрузку с различным coscp
If, А
2,20
2,05
1,90
1,75
1,60
1,45
Costp = 0,7
Coscp = 0,9
а)
1,8 2,0 2,5 3,0 3,5 t,c
в)
1,97 2,0 2,05 /, с 1,97 2,0 2,05 /, с
Рисунок 3.25. Токи возбуждения (ff = 5 Гц) при включении на нагрузки
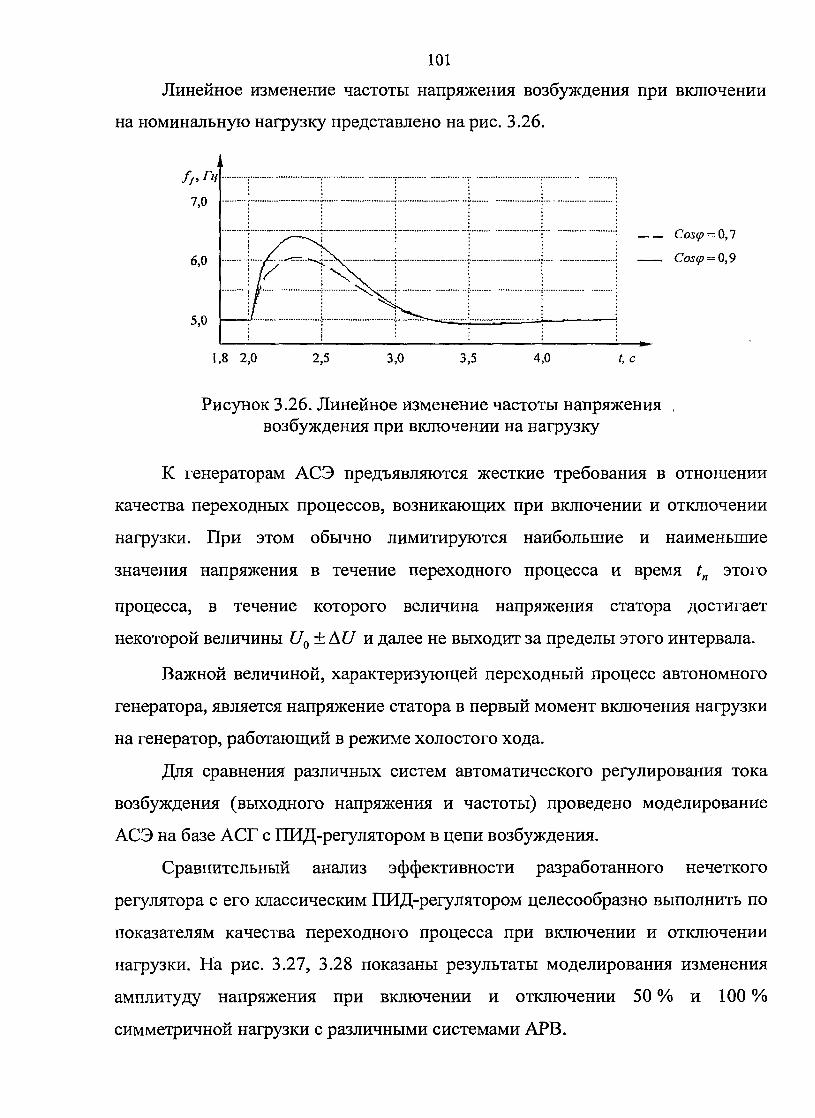
101
Линейное изменение частоты напряжения возбуждения при включении
на номинальную нагрузку представлено на рис. 3.26.
и
\f f :Si4r-
: i ! i
—
^ -1,8 2,0 2,5 3,0 3,5 4,0 /, с
Рисунок 3.26. Линейное изменение частоты напряжения возбуждения при включении на нагрузку
К генераторам АСЭ предъявляются жесткие требования в отношении
качества переходных процессов, возникающих при включении и отключении
нагрузки. При этом обычно лимитируются наибольшие и наименьшие
значения напряжения в течение переходного процесса и время tn этого
процесса, в течение которого величина напряжения статора достигает
некоторой величины U0 ± АС/ и далее не выходит за пределы этого интервала.
Важной величиной, характеризующей переходный процесс автономного
генератора, является напряжение статора в первый момент включения нагрузки
на генератор, работающий в режиме холостого хода.
Для сравнения различных систем автоматического регулирования тока
возбуждения (выходного напряжения и частоты) проведено моделирование
АСЭ на базе АСГ с ПИД-регулятором в цепи возбуждения.
Сравнительный анализ эффективности разработанного нечеткого
регулятора с его классическим ПИД-регулятором целесообразно выполнить по
показателям качества переходного процесса при включении и отключении
нагрузки. На рис. 3.27, 3.28 показаны результаты моделирования изменения
амплитуду напряжения при включении и отключении 50 % и 100 %
симметричной нагрузки с различными системами АРВ.
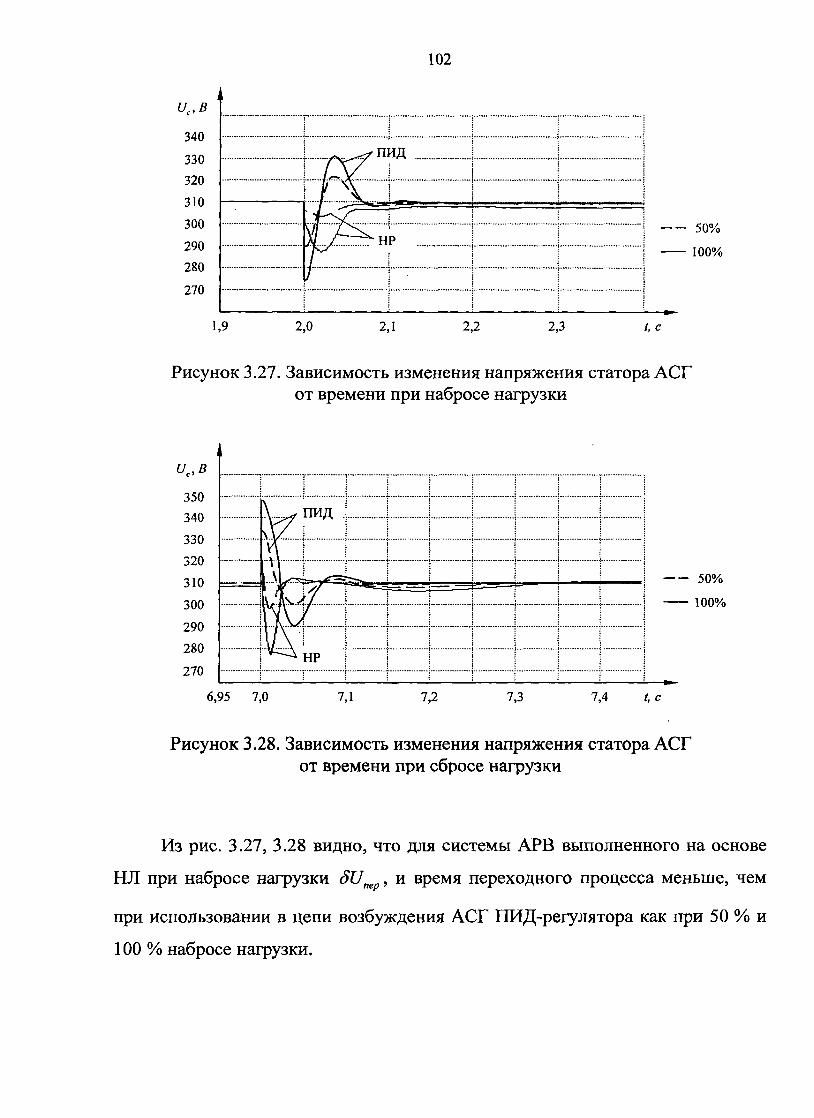
102
ие,в '
340
330
320
310
300
290
280
270
,
J
у^ЧГ
^р^
•/ пид ! j
!
X
\
\ \
\ \ ~~ \ \
- 5 0%
100%
1,9 2,0 2,1 2,2 2,3 t,c
Рисунок 3.27. Зависимость изменения напряжения статора АСГ от времени при набросе нагрузки
ис,в 350
340
330
320
310
300
290
280
270
1
\-г* П И Д -' i i 1 ! '• •' \\/....i ! ] | j | \ ]
i i -( | -} j j ~ j ; | -
1 / \ ; ! ! ! 1 1 1 1 ^ ^ H P j j ( j j j ]
50%
100%
6,95 7,0 7,1 7,2 7,3 7,4 t,c
Рисунок 3.28. Зависимость изменения напряжения статора АСГ от времени при сбросе нагрузки
Из рис. 3.27, 3.28 видно, что для системы АРВ выполненного на основе
НЛ при набросе нагрузки 8U , и время переходного процесса меньше, чем
при использовании в цепи возбуждения АСГ ПИД-регулятора как при 50 % и
100 % набросе нагрузки.
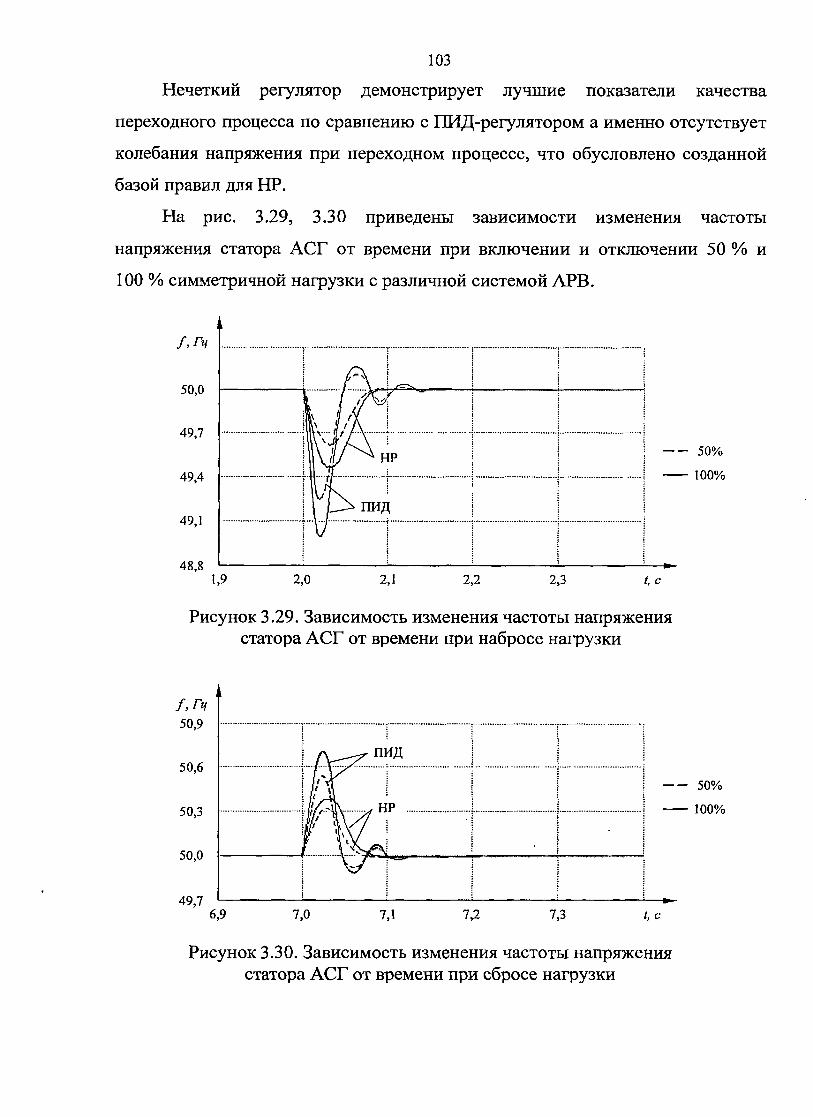
103
Нечеткий регулятор демонстрирует лучшие показатели качества
переходного процесса по сравнению с ПИД-регулятором а именно отсутствует
колебания напряжения при переходном процессе, что обусловлено созданной
базой правил для HP.
На рис. 3.29, 3.30 приведены зависимости изменения частоты
напряжения статора АСГ от времени при включении и отключении 50 % и
100 % симметричной нагрузки с различной системой АРВ.
Рисунок 3.29. Зависимость изменения частоты напряжения статора АСГ от времени при набросе нагрузки
/,Гц 50,9
50,6
50,3
50,0
49,7
50%
100%
6,9 7,0 7Д 7,2 7,3 t, с
Рисунок 3.30. Зависимость изменения частоты напряжения статора АСГ от времени при сбросе нагрузки
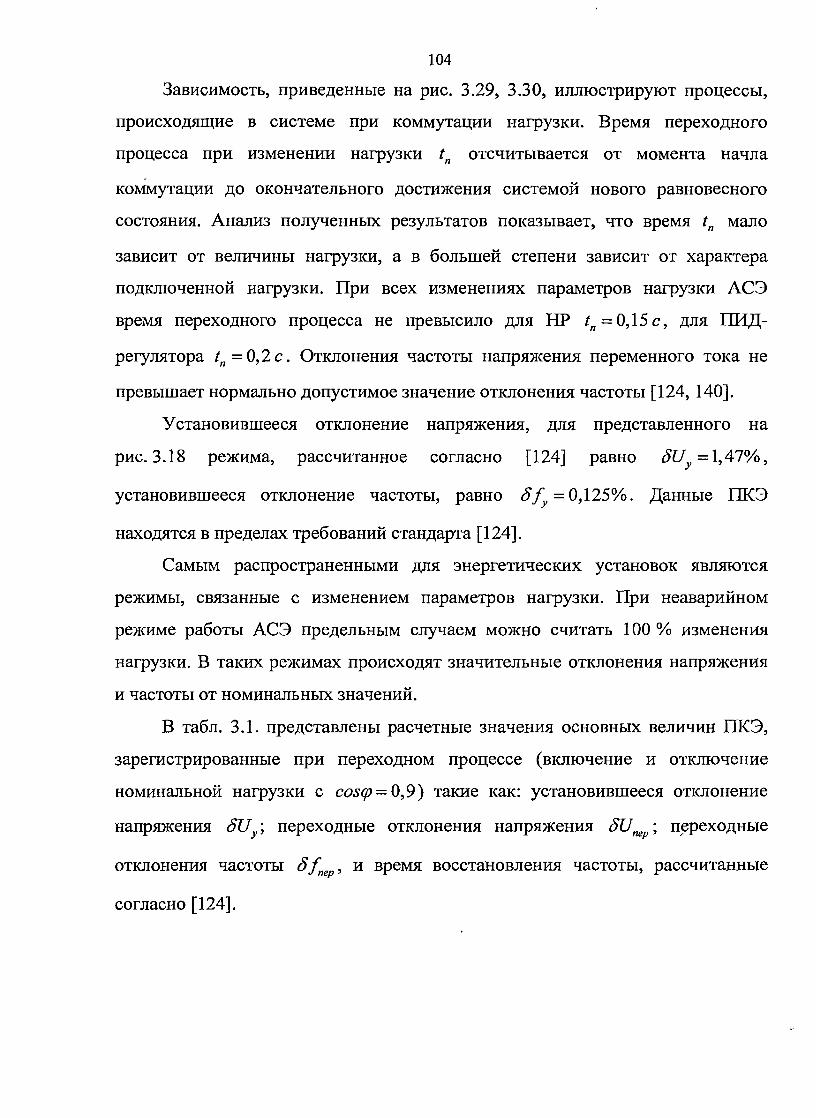
104
Зависимость, приведенные на рис. 3.29, 3.30, иллюстрируют процессы,
происходящие в системе при коммутации нагрузки. Время переходного
процесса при изменении нагрузки tn отсчитывается от момента начла
коммутации до окончательного достижения системой нового равновесного
состояния. Анализ полученных результатов показывает, что время tn мало
зависит от величины нагрузки, а в большей степени зависит от характера
подключенной нагрузки. При всех изменениях параметров нагрузки АСЭ
время переходного процесса не превысило для HP /и = 0,15с, для ПИД-
регулятора tn=0,2c. Отклонения частоты напряжения переменного тока не
превышает нормально допустимое значение отклонения частоты [124, 140].
Установившееся отклонение напряжения, для представленного на
рис. 3.18 режима, рассчитанное согласно [124] равно SUy = l,47%,
установившееся отклонение частоты, равно Sfy = 0,125%. Данные ПКЭ
находятся в пределах требований стандарта [124].
Самым распространенными для энергетических установок являются
режимы, связанные с изменением параметров нагрузки. При неаварийном
режиме работы АСЭ предельным случаем можно считать 100 % изменения
нагрузки. В таких режимах происходят значительные отклонения напряжения
и частоты от номинальных значений.
В табл. 3.1. представлены расчетные значения основных величин ПКЭ,
зарегистрированные при переходном процессе (включение и отключение
номинальной нагрузки с cos<p = 0,9) такие как: установившееся отклонение
напряжения SUy; переходные отклонения напряжения SUnep; переходные
отклонения частоты Sfnep, и время восстановления частоты, рассчитанные
согласно [124].
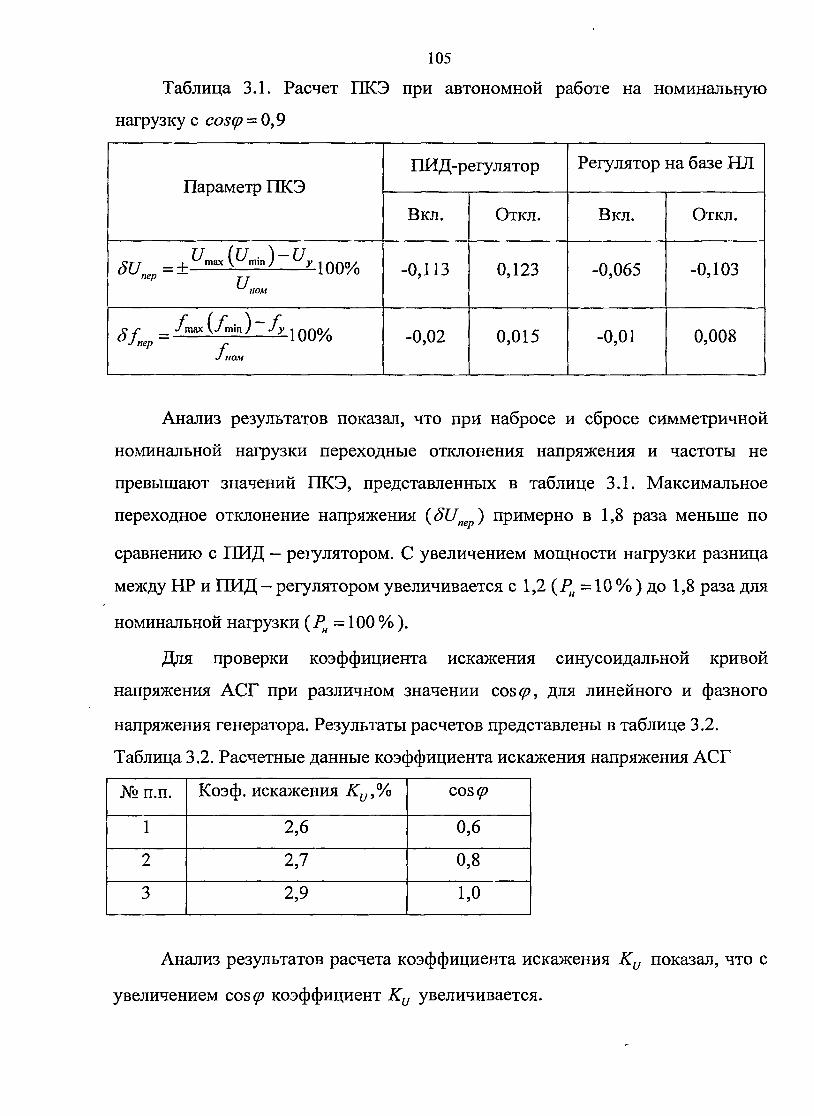
105
Таблица 3.1. Расчет ПКЭ при автономной работе на номинальную
нагрузку с coscp = 0,9
Параметр ПКЭ
su = ±Umax^Umin^~Uy\oo% пер — j-г A.w,yj
ном
X f _ - ^ m a x W min / J у л QQO/ Jnep r
J ном
ПИД-регулятор
Вкл.
-0,113
-0,02
Откл.
0,123
0,015
Регулятор на базе НЛ
Вкл.
-0,065
-0,01
Откл.
-0,103
0,008
Анализ результатов показал, что при набросе и сбросе симметричной
номинальной нагрузки переходные отклонения напряжения и частоты не
превышают значений ПКЭ, представленных в таблице 3.1. Максимальное
переходное отклонение напряжения (SUnep) примерно в 1,8 раза меньше по
сравнению с ПИД - регулятором. С увеличением мощности нагрузки разница
между HP и ПИД - регулятором увеличивается с 1 ,2(^=10%)до 1,8 раза для
номинальной нагрузки {Рн = 100 % ).
Для проверки коэффициента искажения синусоидальной кривой
напряжения АСГ при различном значении cos#>, для линейного и фазного
напряжения генератора. Результаты расчетов представлены в таблице 3.2.
Таблица 3.2. Расчетные данные коэффициента искажения напряжения АСГ
№ п.п.
1
2
3
Коэф. искажения Ки>%
2,6
2,7
2,9
cos#?
0,6
0,8
1,0
Анализ результатов расчета коэффициента искажения Ки показал, что с
увеличением cos#> коэффициент Ки увеличивается.
106
ВЫВОДЫ ПО ТРЕТЬЕЙ ГЛАВЕ
1. На основании дифференциальных уравнений АСГ, при автономной
работе получены уравнения установившихся режимов, связывающие
напряжения и токи генератора как объекта управления, при различном
характере возбуждения его и частоты вращения приводного двигателя.
Построены статические характеристики АСГ.
2. По основным уравнениям построена векторная диаграмма,
иллюстрирующая работу АСГ при повороте и поля статора по направлению и
против направления вращения поля (при скольжении s = 0,1; - 0,1).
3. Определена взаимосвязь момента и мощности (энергетические
соотношения). Получены аналитические выражения для составляющих
результирующего момента и мощности, величины которых определяются
соотношением параметров обмоток возбуждения и значением параметра
возбуждения.
4. Полученные расчетные зависимости (осциллограммы) в целом
корректно отражают физические процессы в реальной электрической машине
при автономной работе, что особенно отчетливо видно из анализа статических
характеристик.
5. Проведён сопоставительный анализ двух вариантов АРВ при
автономной работе АСГ с ПИД-регулятором и системой регулирования на
основе нечеткой логики. Показано, что использование системы регулирования
возбуждением на базе НЛ позволяет стабилизировать амплитуду и частоту
напряжения АСГ в диапазоне ±10 % от номинального значения с учетом
изменения частоты вращения приводного двигателя под действием
механической мощности на валу АСГ. Рассмотрены статические и
динамические режимы работы такой системы при наличии нагрузки, как с
постоянным, так и переменным коэффициентом мощности.
6. Исследованы основные показатели качества электрической энергии,
регламентируемые ГОСТом, в различных режимах работы с различными
107
системами регулирования. Доказано, что использование нечеткого регулятора
в системе АРВ генератора позволяет обеспечить требуемые показатели
качества выходного напряжения в широком диапазоне изменения нагрузки.
Сравнительный анализ динамических режимов автономного АСГ с нечеткими
алгоритмами управления и классическими регуляторами, полученный при
компьютерном моделировании показал, что использование нечеткой логики
обеспечивает требуемую стабилизацию параметров генерируемой
электроэнергии и уменьшает время переходного процесса. Время
регулирования и значение переходного отклонения напряжения во всем
диапазоне изменения нагрузки в среднем в 1,4 раза меньше по сравнению с
использованием классического регулятора возбуждения генератора.
7. Проведено сравнение основных показателей качества электрической
энергии в различных режимах работы АСЭ на базе АСГ. Установившееся
отклонение напряжения при включении номинальной нагрузки с cos ̂ = 0,8
SUy=l,47%, а установившееся отклонение частоты равно £/j, = 0,125%,
коэффициенту искажения синусоидальности кривой напряжения не превышает
Ки = 5%.
8. Математическое моделирование переходных процессов показало, что
предложенный алгоритм формирования оптимального закона регулирования
током возбуждения работоспособен, обеспечивает требуемые показатели
качества выходного напряжения при различных режимах работы исследуемой
автономной системы.
9. Программа расчета статических и динамических режимов является
универсальной моделью АСЭ и позволяет рассчитывать процессы для
различных случаев с достаточной для практики точностью при принятых
допущениях.
108
ГЛАВА 4
ЭКСПЕРИМЕНТАЛЬНОЕ ИССЛЕДОВАНИЕ ЭЛЕКТРОМАГНИТНЫХ
ПРОЦЕССОВ В АСИНХРОНИЗИРОВАННОМ СИНХРОННОМ
ГЕНЕРАТОРЕ
Для проверки теоретических положений, приведенных в данной работе, и
оценки адекватности компьютерной модели, было проведено сравнение
результатов теоретического и экспериментального исследований на базе
учебного стенда «Модель электрической системы».
Экспериментальное исследование АСГ проводилось для определения
параметров исследуемого генератора при автономной работе и включения его
на параллельную работу с энергосистемой для создания компьютерной модели
АСГ, адекватной реальной машине, применительно к АСЭ. Были определены
синхронное индуктивное сопротивление, индуктивные сопротивления обмотки
статора и ротора, постоянная обмотки возбуждения и сопротивления обмоток
машины переменного тока. Исследованы режимы: холостого хода, короткого
замыкания, симметричной активной, активно-индуктивной и активно-
емкостной нагрузки, наброс и сброс номинальной нагрузки. Проведен анализ
(измерение) гармонического искажения выходного напряжения АСГ при
возбуждении от преобразователя частоты с пространственно-векторной
модуляцией.
Ниже предлагается описание экспериментальной установки (ЭУ) для
снятия характеристик, осциллограмм и исследования параметров АСЭ,
разработанной на кафедре «Электромеханика» УГАТУ, с учетом технических и
метрологических требований.
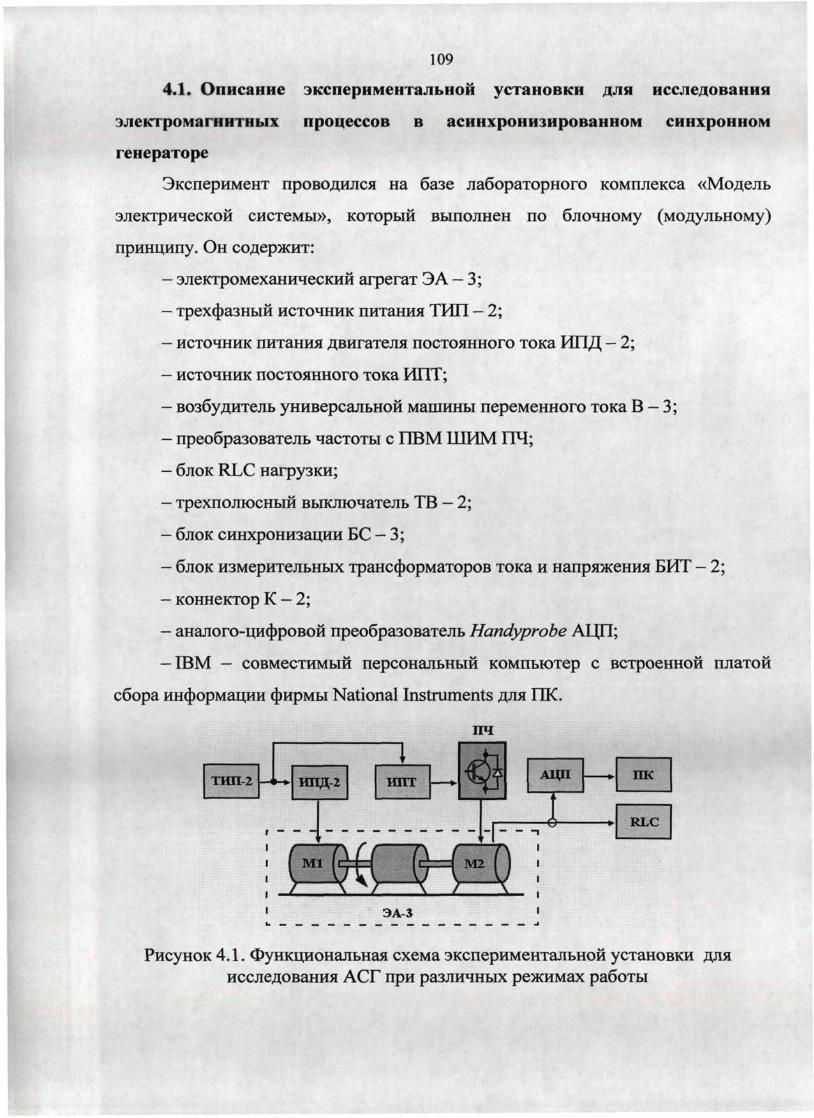
109
4.1. Описание экспериментальной установки для исследования
электромагнитных процессов в асинхронизированном синхронном
генераторе
Эксперимент проводился на базе лабораторного комплекса «Модель
электрической системы», который выполнен по блочному (модульному)
принципу. Он содержит:
- электромеханический агрегат ЭА — 3;
- трехфазный источник питания ТИП - 2;
- источник питания двигателя постоянного тока ИПД - 2;
- источник постоянного тока ИПТ;
- возбудитель универсальной машины переменного тока В - 3;
- преобразователь частоты с ПВМ ШИМ ПЧ;
- блок RLC нагрузки;
- трехполюсный выключатель ТВ - 2;
- блок синхронизации БС - 3;
- блок измерительных трансформаторов тока и напряжения БИТ - 2;
- коннектор К - 2;
- аналого-цифровой преобразователь Handyprobe АЦП;
- IBM - совместимый персональный компьютер с встроенной платой
сбора информации фирмы National Instruments для ПК.
ПЧ
ТИЛ-2 - L J ИПД-2 ИПТ АЦП ПК
-е- RLC
к M l М2
i. ЭА-3
Рисунок 4.1. Функциональная схема экспериментальной установки для исследования АСГ при различных режимах работы
по Функциональная схема экспериментальной установки, показанная на
рис. 4.1, содержит следующие составляющие:
-электромеханический агрегат Э А - 3 , предназначенный для
электромеханического преобразования энергии машинами постоянного и / или
переменного тока, получения сигналов, определяющих частоту вращения и
угловое положение подвижных частей агрегата. Конструктивно
электромагнитный агрегат представляет спаренные между собой и
установленные на едином основании машину постоянного тока (Ml),
универсальную машину переменного тока (М2) и маховик (технические
характеристики даны в приложении Б);
- система возбуждения машины постоянного тока (ИПД-2), запитываемая
от сети переменного напряжения;
-система возбуждения машины переменного тока, состоящая из
преобразователя частоты с пространственно векторной модуляцией на базе
IGBT-транзисторов, питаемого от блока выпрямленного постоянного тока;
- системы однофазных нагрузок;
-аналого-цифровой преобразователь Handyprobe и персональный
компьютер, используемый для управления, снятия осциллограмм и анализа
полученных результатов.
В машину постоянного тока встроен тахогенератор постоянного тока, а
универсальная машина переменного тока сочленена с датчиком угловых
перемещений.
Машина постоянного тока - обратимая. Она является машиной
независимого возбуждения с компенсационной обмоткой, обеспечивающей
полную компенсацию поля реакции якоря по всей его окружности на холостом
ходу и под нагрузкой. Такая машина может выполнять функции двигателя или
электромагнитного тормоза.
Внешний вид и принципиальная схема экспериментальной установки
представлены на рис. 4.2, 4.3 соответственно.
1 , . -щ
LA
Рисунок 4.2. Внешний вид экспериментальной установки «Модель электрической системы»
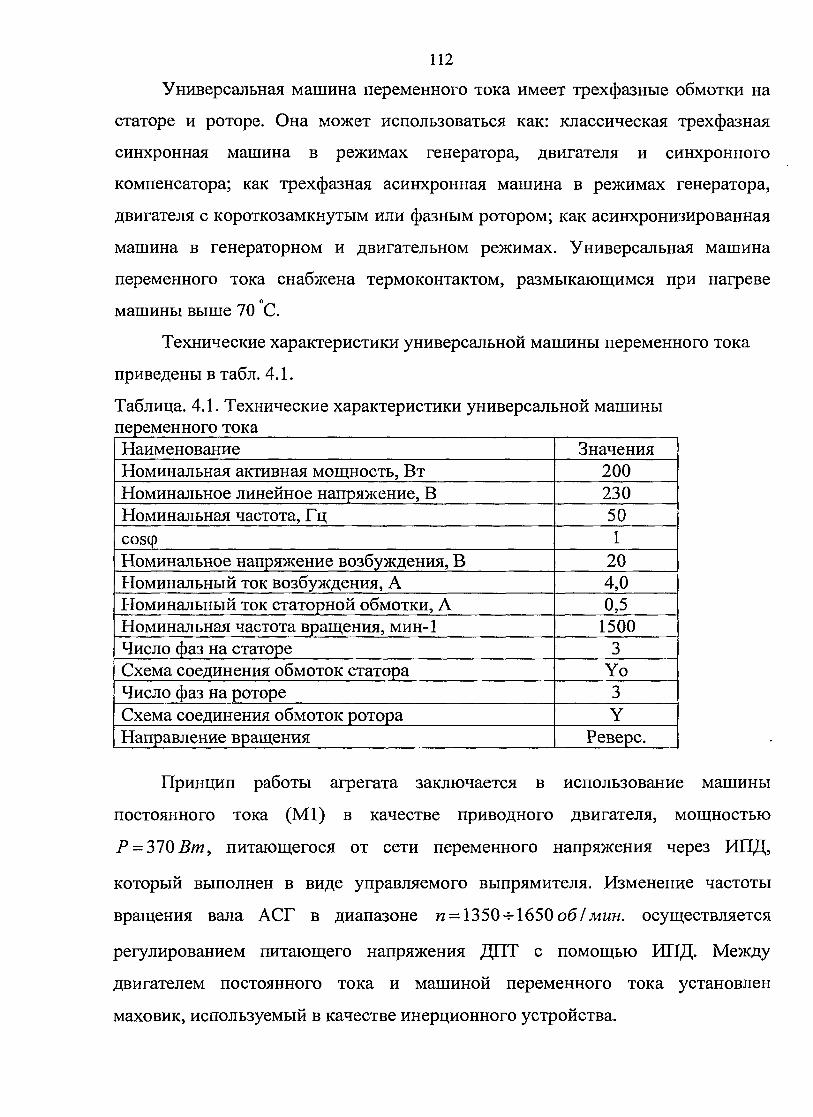
112
Универсальная машина переменного тока имеет трехфазные обмотки на
статоре и роторе. Она может использоваться как: классическая трехфазная
синхронная машина в режимах генератора, двигателя и синхронного
компенсатора; как трехфазная асинхронная машина в режимах генератора,
двигателя с короткозамкнутым или фазным ротором; как асинхронизированная
машина в генераторном и двигательном режимах. Универсальная машина
переменного тока снабжена термоконтактом, размыкающимся при нагреве о
машины выше 70 С.
Технические характеристики универсальной машины переменного тока
приведены в табл. 4.1. Таблица. 4.1. Технические характеристики универсальной машины переменного тока Наименование Номинальная активная мощность, Вт Номинальное линейное напряжение, В Номинальная частота, Гц coscp Номинальное напряжение возбуждения, В Номинальный ток возбуждения, А Номинальный ток статорной обмотки, А Номинальная частота вращения, мин-1 Число фаз на статоре Схема соединения обмоток статора Число фаз на роторе Схема соединения обмоток ротора Направление вращения
Значения 200 230 50 1
20 4,0 0,5
1500 3
Yo 3 Y
Реверс.
Принцип работы агрегата заключается в использование машины
постоянного тока (Ml) в качестве приводного двигателя, мощностью
Р = 370Вт, питающегося от сети переменного напряжения через ИПД,
который выполнен в виде управляемого выпрямителя. Изменение частоты
вращения вала АСГ в диапазоне п = 1350 -г 1650 об/мин. осуществляется
регулированием питающего напряжения ДПТ с помощью ИПД. Между
двигателем постоянного тока и машиной переменного тока установлен
маховик, используемый в качестве инерционного устройства.
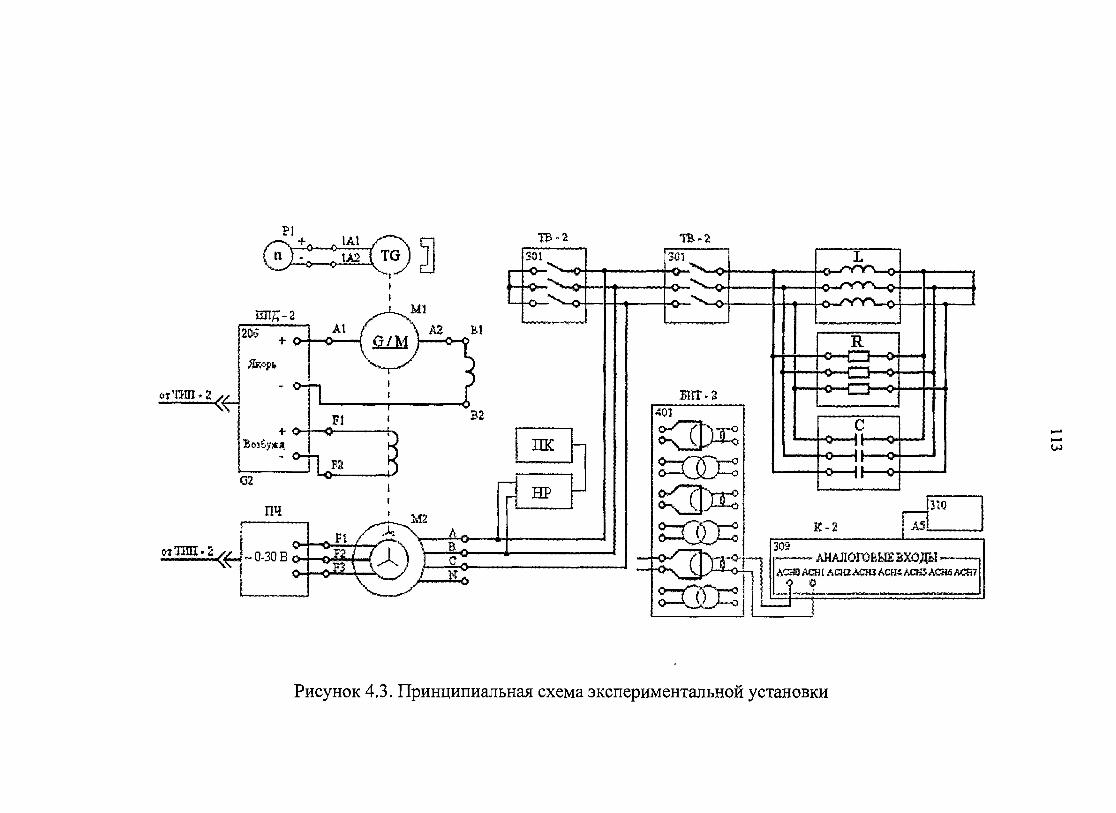
TB-2 та.-а
ПК
П 1 HP
так
W
Рисунок 4.3. Принципиальная схема экспериментальной установки
114
Маховик используется для формирования тахогенератором постоянного
напряжения, пропорционального частоте вращения подвижных частей агрегата,
а датчиком угловых перемещений — последовательности импульсов,
определяющих угловое положение этих частей относительно неподвижных
частей агрегата.
Связь с компьютером для управления ЭУ обеспечивается с помощью
коннектора, который соединен посредством шлейфа с компьютером и имеет 4
дифференциальных аналоговых входа АСН0-АСН1, АСН2-АСНЗ, АСН4-АСН5
и АСН6-АСН7 (каналы 0, 2, 4, 6, соответственно), к которым подводятся
измеряемые электрические параметры тока и напряжения от блока
измерительных трансформаторов.
Питание ЭУ осуществляется от трехфазной электрической сети
напряжением 380 В, частотой 50 Гц с нейтральным и защитным проводником.
Источником бесконечной мощности является общеуниверситетская трехфазная
питающая сеть 380 В, 50 Гц включаемая через блок синхронизации БС-3.
Нагрузка в экспериментальной установке для исследования автономной
работы представлена следующим образом:
- активная нагрузка 3*100 Вт с шагом регулирования 25 %;
- индуктивная нагрузка 3*100 В Ар с шагом регулирования 20 %;
- емкостная нагрузка 3*100 ВАр с шагом регулирования 2 мкФ.
Используемые нагрузки допускают различные схемы соединения
треугольник - звезда, а так же послед/параллельное соединения между собой.
Программная часть комплекса включает разработанный с помощью
программной среды Lab VIEW виртуальный пульт управления моделью
электрической системы, как для автономной, так и для параллельной работы СГ
и АСГ, виртуальные измерительные приборы и осциллографы.
Для управления экспериментальной электрической схемой создана
программа в среде LabView фирмы National Instruments. Программная среда
LabView являются интегрированной средой, объединяющая в себе мощные
средства для инженерных и научных расчетов, и визуализации полученных
115
данных. Этот современный пакет поддерживает визуальное программирование
на основе блок-схем, что позволяет составлять программы в различных
прикладных областях. Данная программа имеет мощные средства для
обработки сигналов. Она имеет открытую архитектуру и позволяет
организовать взаимодействие с аппаратурой для ввода информации в
компьютер [125, 126].
Разработанная программа работает в реальном масштабе времени и
позволяет автоматизировать процессы измерений, обработки сигналов,
отображения и архивирования результатов экспериментов, интерактивного
генерирования отчетов, управления технологическими процессами на базе
персонального компьютера.
В связи с существенными погрешностями, вносимыми трансформаторами
тока и напряжения (не обеспечивающими требуемый класс точности),
разработанная программа в пакете LabView не использовалась для измерения.
Данная программа использовалась только для управления, синхронизации по
времени и исследования режимов работы автономной системы. Измерения,
снятие характеристик и осциллограмм осуществлялся двухканальным аналого-
цифрововым устройством Handyprobe. Handyprobe подключался
непосредственно к компьютеру без промежуточных устройств. Технические
характеристики Handyprobe приведены в приложении В.
Высокую достоверность результатов измерения обеспечивает применение в
исследуемой системе датчиков и приборов, отвечающих требованиям стандартов, в
первую очередь метрологическим характеристикам, по устойчивости к внешним
воздействиям среды.
В качестве преобразователя частоты в цепи системы возбуждения АСГ
использован преобразователь со звеном постоянного тока, основанный на
ПВМ, с силовой частью на базе IGBT—транзисторах, изготовленный на кафедре
«Электромеханика» УГАТУ.
пё
4.2. Построение преобразователя частоты для асинхронизированного
синхронного генератора
В преобразователе частоты с микропроцессорной системой управления
реализован метод пространственно-векторной модуляции (ПВМ). ПВМ был
разработан в середине 90-х годов в связи расширением возможностей систем
микропроцессорного управления, что позволило упростить процесс
вычислений и обеспечить возможность быстрого реагирования на изменения
нагрузки. Традиционные методы ШИМ основаны на сравнении сигнала задания
с сигналом линейной развертки (пилообразным напряжением) в результате чего
в обмотках электрической машины формировалась последовательность
прямоугольных импульсов, скважность которых изменялась в соответствии с
сигналом задания. Однако из-за влияния электромагнитных процессов (прежде
всего ЭДС вращения) характер изменения токов в обмотках не имеет
однозначной связи с законом изменения сигнала управления и сильно зависит
от режима работы машины [63, 127, 128, 129].
Алгоритм управления ключами автономного инвертора в режиме ПВМ
основан на формировании требуемого положения вектора напряжения в
пространстве на каждом временном интервале. В случае аналогового источника
питания для решения этой задачи достаточно сформировать в каждой обмотке
напряжение, соответствующее проекции заданного вектора на ось обмотки. Как
результат, время вычислений сокращается, тем самым повышается
производительность и сокращается время реакции [130].
Модуль ненулевого базового вектора можно определить, пользуясь
понятием обобщённого вектора. Пусть, задано какое-либо замкнутое состояние
ключей, например, 1-4-6. Тогда обмотки цепи возбуждения будут подключены
к источнику постоянного тока. В силу симметрии обмоток и с учетом
направления (в а от начала к концу, в Ъ и с от конца к началу), напряжения на
них составят - иа = 2Udj3; ub=uc= —Ud/3. Отсюда модуль вектора напряжения
или базового вектора равен [131, 132]:
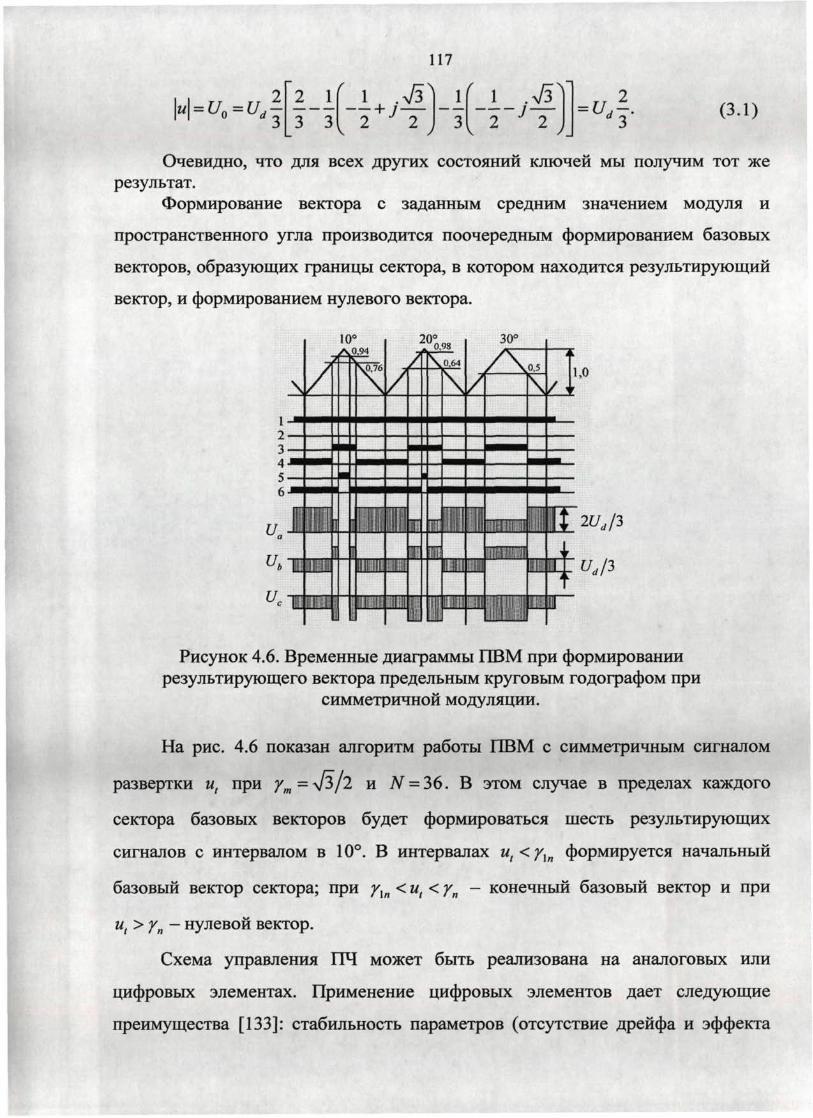
117
\u\ = U0=Ud-2_l 3 3
f -L+J£ 2 2
V3 Л
2 J -a (3.1)
Очевидно, что для всех других состояний ключей мы получим тот же результат.
Формирование вектора с заданным средним значением модуля и
пространственного угла производится поочередным формированием базовых
векторов, образующих границы сектора, в котором находится результирующий
вектор, и формированием нулевого вектора.
2UJ3
Рисунок 4.6. Временные диаграммы ПВМ при формировании результирующего вектора предельным круговым годографом при
симметричной модуляции.
На рис. 4.6 показан алгоритм работы ПВМ с симметричным сигналом
развертки ut при ym=yJ3/2 и N = 36. В этом случае в пределах каждого
сектора базовых векторов будет формироваться шесть результирующих
сигналов с интервалом в 10°. В интервалах ut<yln формируется начальный
базовый вектор сектора; при уХп <ut<yn - конечный базовый вектор и при
ut>yn- нулевой вектор.
Схема управления ПЧ может быть реализована на аналоговых или
цифровых элементах. Применение цифровых элементов дает следующие
преимущества [133]: стабильность параметров (отсутствие дрейфа и эффекта

118
старения); высокая точность и помехоустойчивость; гибкость (алгоритмы могут
быть изменены программно).
Применительно к инвертору, используемого для системы возбуждения
АСГ, алгоритм ПВМ реализован на базе микроконтроллера С508 (Infineon),
периферия которого специализирована для цифрового управления
электроприводом переменного тока, БДПТ и шаговым приводом. Этот
микроконтроллер имеет возможность обрабатывать аналоговые сигналы с
использованием встроенных быстрых ЦАП и АЦП. Это свойство делает С508
универсальным в системе управления АСГ.
При построении силовой части преобразователя частоты, выбрана схема
на базе IGBT-транзисторов, со встречно параллельными диодами.
Питание ПЧ производилось от отдельного источника постоянного тока.
Классическая схема частотного преобразователя для машины
переменного тока приведена на рис. 4.4.
Микроконтроллер
С508
ШИМ сигналы
Драйвер IGBT
3-х фазный инвертор
~и
Рисунок 4.4. Структурная схема устройства управления АСГ
Принцип работы ПЧ основан на генерации высокочастотного ШИМ-
сигнала (20 кГц), сформированного микроконтроллером, который поступает на
схему драйвера IGBT-моста, питающего обмотку ротора генератора (рис. 4.4.).
Драйвер, выполненный на микросхеме IR2130 фирмы INTERNATIONAL
RECTIFIER, имеет три выхода для управления нижними ключами моста и три
выхода для ключей с плавающим потенциалом управления. В микросхеме
предусмотрена защита по току и от снижения питающего напряжения, которая
выключает все ключи. Драйвер, соединенный с операционным усилителем, что
обеспечивает обратную связь по току моста через внешний измерительный
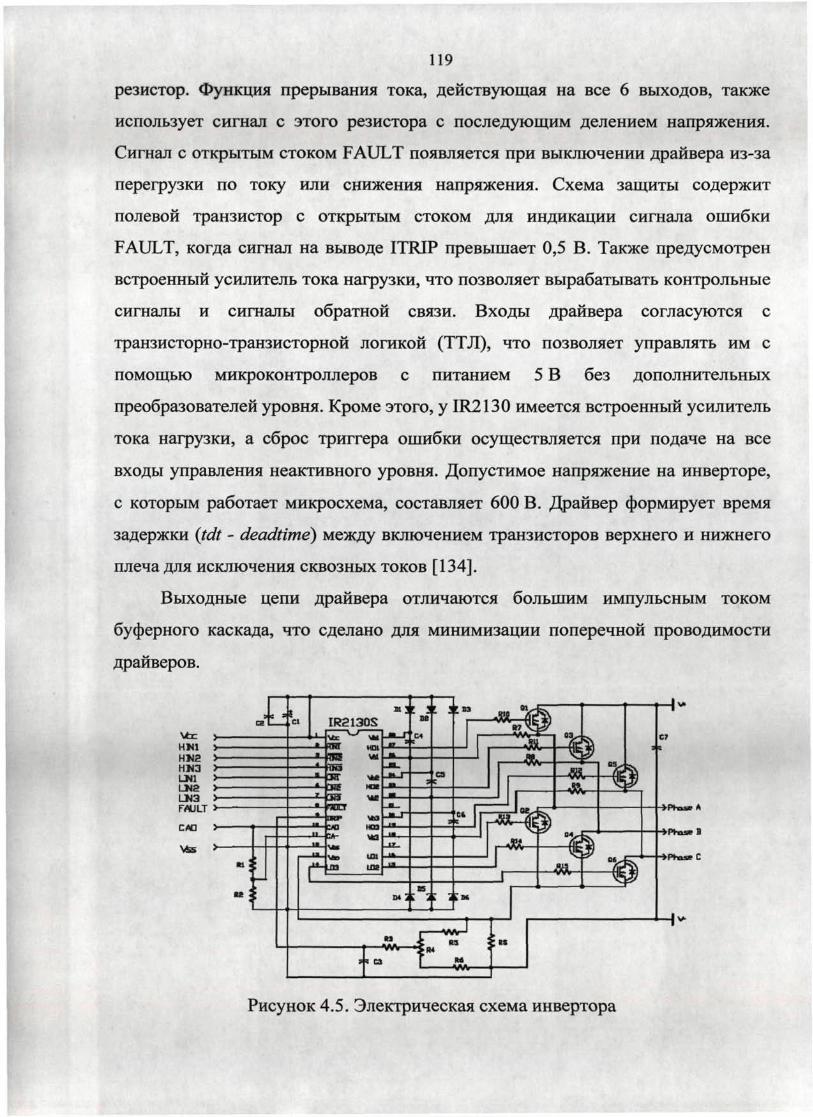
119
резистор. Функция прерывания тока, действующая на все 6 выходов, также
использует сигнал с этого резистора с последующим делением напряжения.
Сигнал с открытым стоком FAULT появляется при выключении драйвера из-за
перегрузки по току или снижения напряжения. Схема защиты содержит
полевой транзистор с открытым стоком для индикации сигнала ошибки
FAULT, когда сигнал на выводе ITRIP превышает 0,5 В. Также предусмотрен
встроенный усилитель тока нагрузки, что позволяет вырабатывать контрольные
сигналы и сигналы обратной связи. Входы драйвера согласуются с
транзисторно-транзисторной логикой (ТТЛ), что позволяет управлять им с
помощью микроконтроллеров с питанием 5 В без дополнительных
преобразователей уровня. Кроме этого, у IR2130 имеется встроенный усилитель
тока нагрузки, а сброс триггера ошибки осуществляется при подаче на все
входы управления неактивного уровня. Допустимое напряжение на инверторе,
с которым работает микросхема, составляет 600 В. Драйвер формирует время
задержки {tdt - deadtime) между включением транзисторов верхнего и нижнего
плеча для исключения сквозных токов [134].
Выходные цепи драйвера отличаются большим импульсным током
буферного каскада, что сделано для минимизации поперечной проводимости
драйверов.
Vfcc >_ HIM >-НЛ2 >-низ >-|_ы >-L № >-LN3 >-FAULT >-
cm
\6s
IR2130S
•II»
jU-JLM
H Q I
- * - 5 Э -*- ГЯСТ
Г C4
Л - Г
H
M i k SE A »
- W r
- ^ A H
M
Л-to „
-•Rv-
Ж-
-J&-
4BU - * & r -
-«SU
4-
^Phis tA
*PKls» В
•Phis? С
-i-
Рисунок 4.5. Электрическая схема инвертора
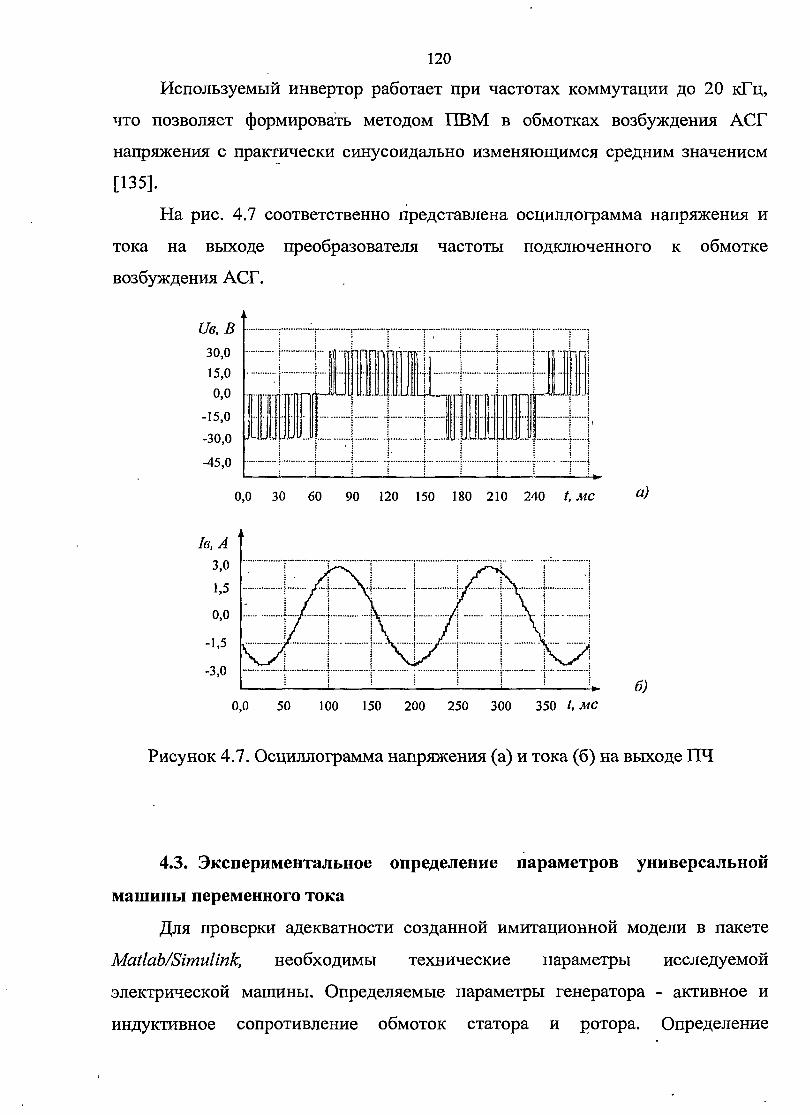
120
Используемый инвертор работает при частотах коммутации до 20 кГц,
что позволяет формировать методом ПВМ в обмотках возбуждения АСГ
напряжения с практически синусоидально изменяющимся средним значением
[135].
На рис. 4.7 соответственно представлена осциллограмма напряжения и
тока на выходе преобразователя частоты подключенного к обмотке
возбуждения АСГ.
Ue, В 30,0
15,0
0,0
-15,0
-30,0
-45,0
U.UV.J
ГТПП П!
0,0 30 60 90 120 150 180 210 240 t, мс а)
0,0 50 100 150 200 250 300 350 t, МС
б)
Рисунок 4.7. Осциллограмма напряжения (а) и тока (б) на выходе ГГЧ
4.3. Экспериментальное определение параметров универсальной
машины переменного тока
Для проверки адекватности созданной имитационной модели в пакете
Matlab/Simulink, необходимы технические параметры исследуемой
электрической машины. Определяемые параметры генератора - активное и
индуктивное сопротивление обмоток статора и ротора. Определение
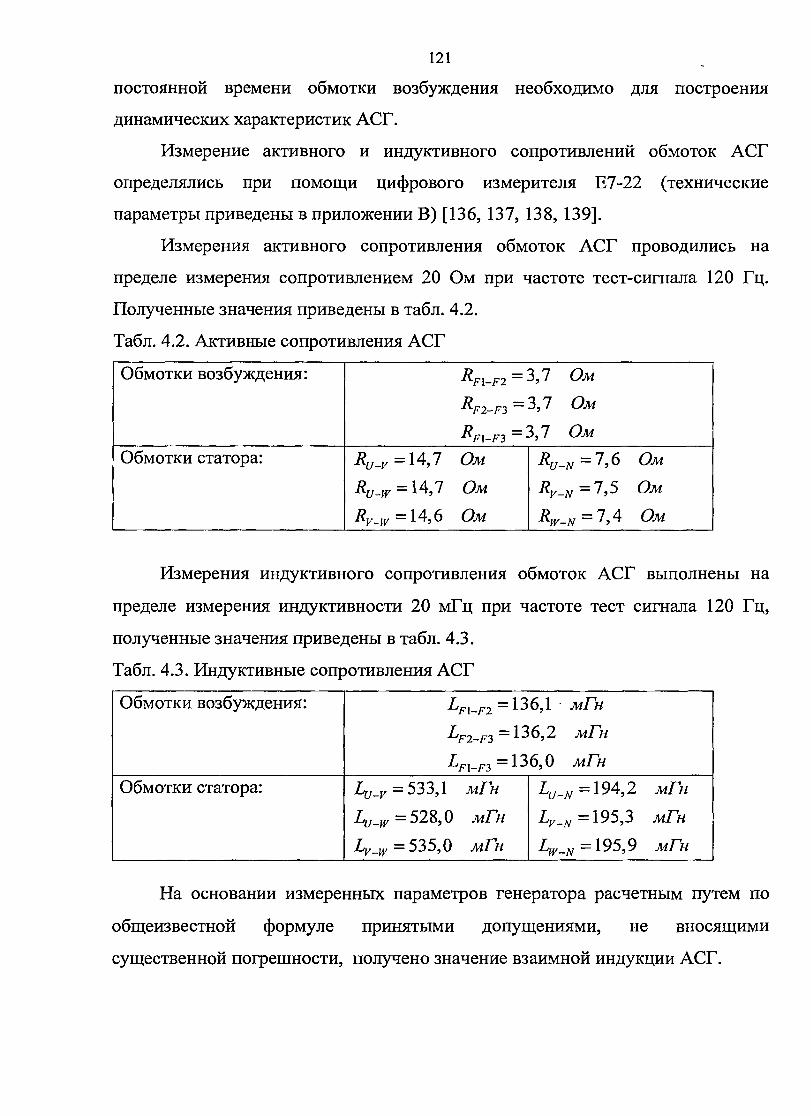
121
постоянной времени обмотки возбуждения необходимо для построения
динамических характеристик АСГ.
Измерение активного и индуктивного сопротивлений обмоток АСГ
определялись при помощи цифрового измерителя Е7-22 (технические
параметры приведены в приложении В) [136, 137, 138, 139].
Измерения активного сопротивления обмоток АСГ проводились на
пределе измерения сопротивлением 20 Ом при частоте тест-сигнала 120 Гц.
Полученные значения приведены в табл. 4.2.
Табл. 4.2. Активные сопротивления АСГ
Обмотки возбуждения:
Обмотки статора:
RFI-F2 = 3,7 Ом
RF2-F3 = 3,7 Ом RFl-F3=3,7 Ом
Rv_v =14,7 Ом
R^W=U,7 Ом
Rv_w=\4,6 Ом
RU-N=7'6 Ом
RV_N =7,5 Ом
RW-N=7>4 °м
Измерения индуктивного сопротивления обмоток АСГ выполнены на
пределе измерения индуктивности 20 мГц при частоте тест сигнала 120 Гц,
полученные значения приведены в табл. 4.3.
Табл. 4.3. Индуктивные сопротивления АСГ
Обмотки возбуждения:
Обмотки статора:
LFX_F2 =136,1 мГн
LF2_F3 =136,2 мГн
LFl_F3 = 13 6,0 мГн
1^.^ = 533,1 мГн
Lu_w = 528,0 мГн
Ly_w= 535,0 мГн
Ly_N =194,2 мГн
Ly_N =195,3 мГн
Цу_м=\95,9 мГн
На основании измеренных параметров генератора расчетным путем по
общеизвестной формуле принятыми допущениями, не вносящими
существенной погрешности, получено значение взаимной индукции АСГ.
122
4.4. Характеристики асинхронизированного синхронного генератора
и проверка адекватности модели
Основной отличительной особенностью снятия внешних характеристик
асинхронизированного синхронного генератора является поддержание
принятой постоянной частоты напряжения для питания обмотки возбуждения
при различных внешних нагрузках.
Все представленные характеристики для АСГ рассчитаны при
постоянной частоте вращения, равной п = 1350 -И650 об I мин.
по -Рп
п~ 2700 -г- 3300 об /мин, переменном трехфазном возбуждении с
со-со со частотой fs=5Гц s = = 0,1, со = — — = 314рад/с и отключенной системе
со l-s
регулирования возбуждения. Для синхронного генератора характеристики
построены при постоянной частоте вращения и = 1500 обIмин.
4.4.1. Характеристики холостого хода
Характеристики холостого хода (XX) для АСГ и СГ снимались в
автоматическом режиме при стабильной частоте 50 Гц выходного напряжения
и частоте тока возбуждения 5 Гц для АСГ посредством аналого-цифрового
преобразователя Handyprobe. При снятии характеристики XX для СГ
напряжение возбуждения подключалось к обмотке возбуждения Fx-F3, для
режима АСГ использовались все три обмотки возбуждения Fx-F2-F3
соединенные в звезду.
Вследствие явления гистерезиса характеристики холостого хода обычно
не проходят через начало координат, поэтому для определенности,
характеристики холостого хода снимали с наибольшего значения тока
возбуждения, равного номинальному току возбуждения, но не ниже значения,
соответствующего 1,3 номинального напряжения UH испытуемой машины.
Чтобы полученные характеристики провести через начало координат, их
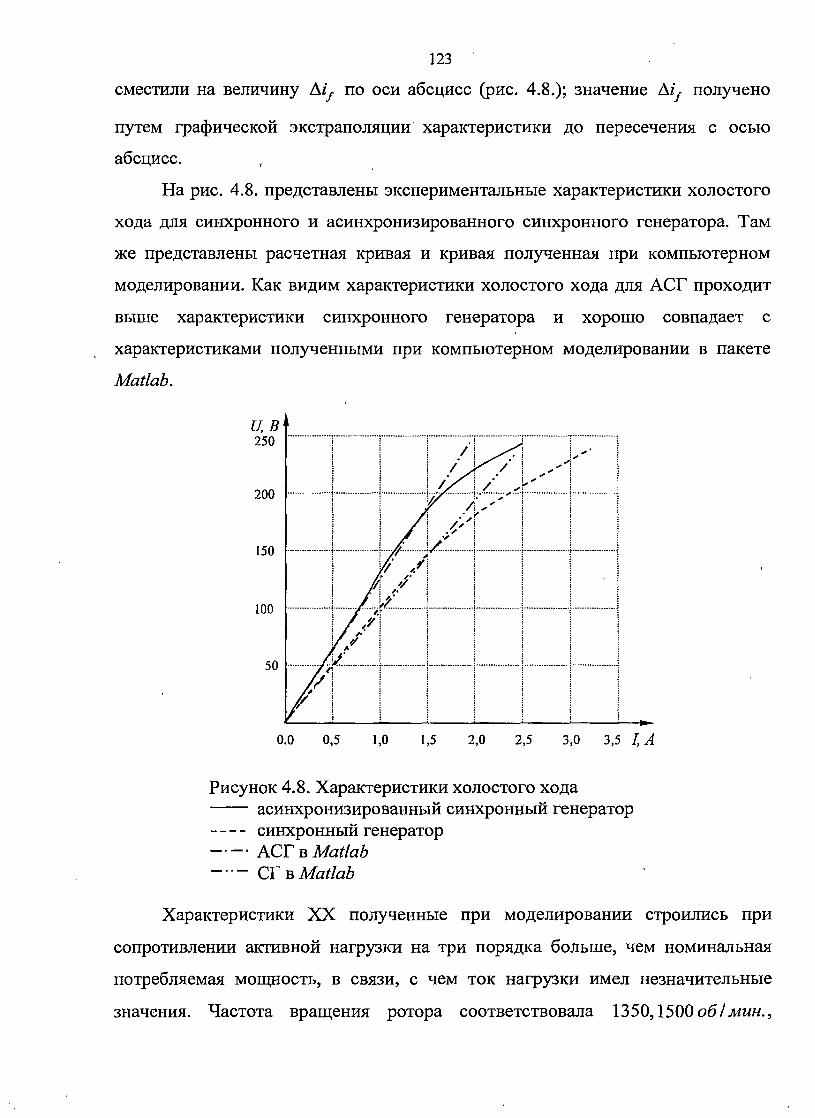
123
сместили на величину Aif по оси абсцисс (рис. 4.8.); значение Aif получено
путем графической экстраполяции характеристики до пересечения с осью
абсцисс.
На рис. 4.8. представлены экспериментальные характеристики холостого
хода для синхронного и асинхронизированного синхронного генератора. Там
же представлены расчетная кривая и кривая полученная при компьютерном
моделировании. Как видим характеристики холостого хода для АСГ проходит
выше характеристики синхронного генератора и хорошо совпадает с
характеристиками полученными при компьютерном моделировании в пакете
Matlab.
U, В' 250
200
150
100
50
,
| /
i / '? ys
AL ft
/ 1
/f /
/1 ^У\ /)У' \ У
(У\/ У
.У\ / .1 1 : |
х *
0.0 0,5 1,0 1,5 2,0 2,5 3,0 3,5 I, А
Рисунок 4.8. Характеристики холостого хода асинхронизированный синхронный генератор синхронный генератор АСГ в Matlab СГ в Matlab
Характеристики XX полученные при моделировании строились при
сопротивлении активной нагрузки на три порядка больше, чем номинальная
потребляемая мощность, в связи, с чем ток нагрузки имел незначительные
значения. Частота вращения ротора соответствовала 1350,1500 об/мин.,
124
частота возбуждения 5 и 0 Гц. Напряжение возбуждения устанавливалось
таким, чтобы при частоте вращения ротора 1350 обIмин. в обмотке статора
индуктировалась ЭДС 230 В частотой 50 Гц — при частоте возбуждения, равной
5 Гц. Результаты моделирования представлены на рис. 4.8.
Полученные кривые соответствуют линейному участку, только до
U = 150В, далее начинается слабое насыщение электрической машины.
Дальнейшее увеличение напряжения и тока было ограничено возможностями
источника питания для режима АСГ.
4.4.2. Опыт внезапного короткого замыкания
Были проведены опыты внезапного короткого замыкания АСГ и СГ для
определения и проверки индуктивных сопротивлений, полученных путем
измерения переходных функций и постоянных времени. При этом замыкание
трех фаз выполнялось в автоматическом режиме для соблюдения
симметричности включения [140]. Для определения названных параметров
экспериментальным путем получены осциллограммы токов во всех фазах якоря
и ток в цепи возбуждения. Запись переходного процесса производится в
течение времени, равного, примерно, удвоенному значению переходной
постоянной времени по продольной оси при замкнутой накоротко обмотке
якоря, при этом установившиеся значения измерялись при помощи приборов и
аналого-цифрового осциллографа. Замыкание обмотки якоря производим при
работе машины в режиме холостого хода, при заданном напряжении и
номинальной частоте вращения.
Для получения параметров, соответствующих ненасыщенному состоянию
машины, опыт внезапного короткого замыкания проводился при нескольких
значениях напряжения в пределах 0,1.. .0,4 номинального.
В ходе опыта КЗ получены значения индуктивного сопротивления,
которые на 9 % превышают значения, полученные при непосредственном
измерении.
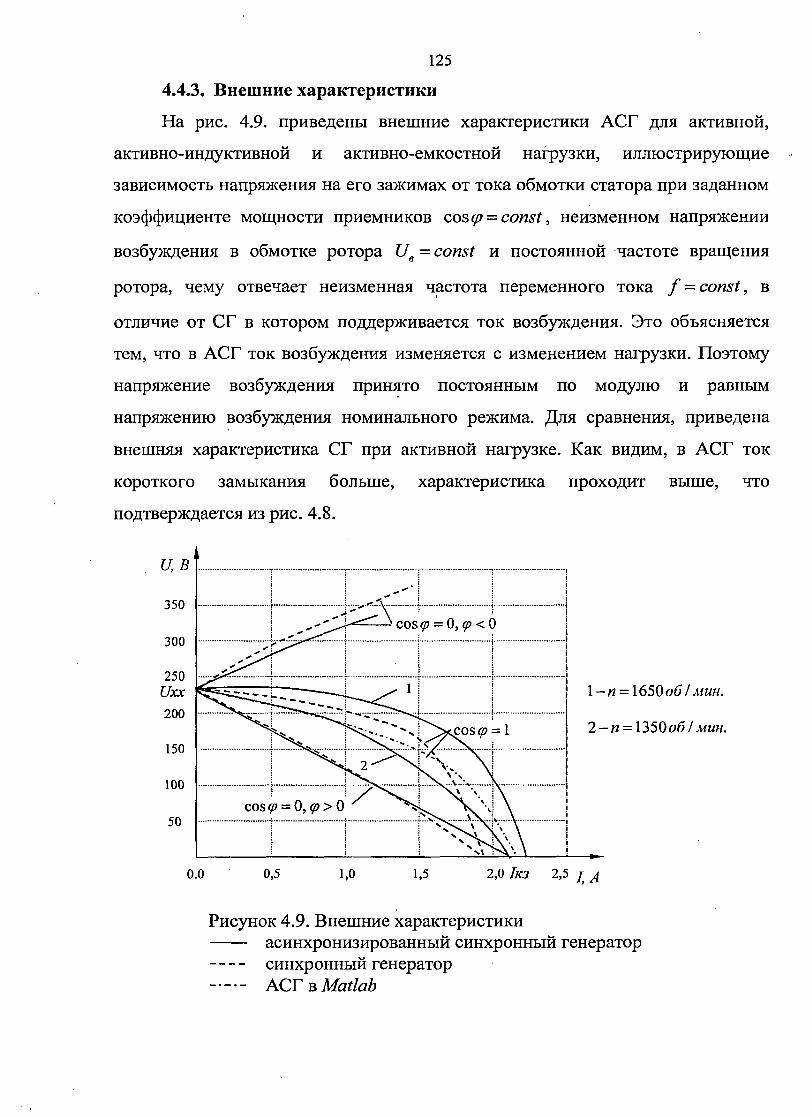
125
4.4.3. Внешние характеристики
На рис. 4.9. приведены внешние характеристики АСГ для активной,
активно-индуктивной и активно-емкостной нагрузки, иллюстрирующие
зависимость напряжения на его зажимах от тока обмотки статора при заданном
коэффициенте мощности приемников cosq> = const, неизменном напряжении
возбуждения в обмотке ротора Ue = const и постоянной частоте вращения
ротора, чему отвечает неизменная частота переменного тока f = const, в
отличие от СГ в котором поддерживается ток возбуждения. Это объясняется
тем, что в АСГ ток возбуждения изменяется с изменением нагрузки. Поэтому
напряжение возбуждения принято постоянным по модулю и равным
напряжению возбуждения номинального режима. Для сравнения, приведена
внешняя характеристика СГ при активной нагрузке. Как видим, в АСГ ток
короткого замыкания больше, характеристика проходит выше, что
подтверждается из рис. 4.8.
1 — п = \650об/мин.
2 — п = 1350 об I мин.
0.0 0,5 1,0 1,5 2,0 1кз 2,5 / ^
Рисунок 4.9. Внешние характеристики асинхронизированный синхронный генератор синхронный генератор АСГ в Matlab
126
Так, при индуктивной нагрузке, внешняя характеристика синхронного
генератора имеет резко падающий характер, причем с уменьшением cos ср
падение напряжения усиливается (рис. 4.9). При активно-емкостной нагрузке
cos#? опережающий и с ростом потребляемого тока напряжение возрастает тем
сильнее, чем меньше cos#>. При С/ = 0 (короткое замыкание) все
характеристики пересекаются в одной точке, соответствующей значению тока
трехфазного короткого замыкания для АСГ 1КЗ =2,14 А и СГ /га = 1,94 А.
На основании проведенных экспериментальных измерений и
компьютерного построения внешних характеристик (рис. 4.9) видно, что:
- в асинхронизированном режиме работы генератора характеристики
более жесткие, чем в режиме синхронного генератора;
-при вращении ротора 1350обI мин и возбуждении током 5 Гц (при
скольжении 5 = 0,1) генерируемое напряжение уменьшается с увеличением,
тока нагрузки. Это вызвано тем, что ЭДС, индуктированная током нагрузки в
роторе (реакция якоря), меньше напряжения источника возбуждения, и разница
между ними увеличивается с увеличением нагрузки. Следовательно, снижается
результирующий поток возбуждения и индуктируемая им ЭДС якоря (статора).
-при вращении ротора 1650 об I мин и возбуждении током 5 Гц,
генерируемое напряжение увеличивается с ростом тока. Это объясняется тем,
что реакция якоря больше напряжения источника возбуждения, и разница
между ними увеличивается с увеличением нагрузки. Следовательно,
увеличивается результирующий поток возбуждения и индуктируемая им ЭДС
якоря;
4.4.4. Регулировочные характеристики
Семейство регулировочных характеристик АСГ If = f(I) при различных
углах нагрузки ср показано на рис. 4.10.
При активно-индуктивной нагрузке {(р> 0 ) рис. 4.10 МДС статора носит
размагничивающий характер и для поддержания заданного напряжения
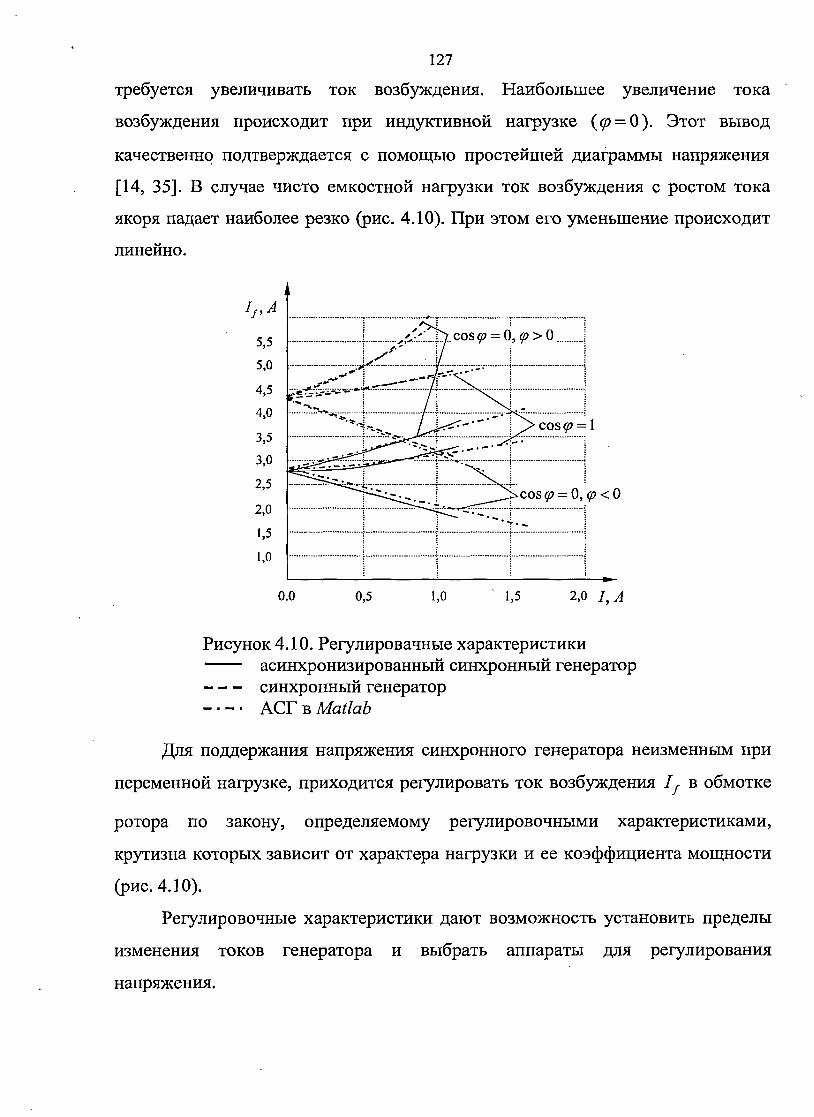
127
требуется увеличивать ток возбуждения. Наибольшее увеличение тока
возбуждения происходит при индуктивной нагрузке (#? = 0). Этот вывод
качественно подтверждается с помощью простейшей диаграммы напряжения
[14, 35]. В случае чисто емкостной нагрузки ток возбуждения с ростом тока
якоря падает наиболее резко (рис. 4.10). При этом его уменьшение происходит
линейно.
о.о 0,5 1,0 1,5 2,0 1,А
Рисунок 4.10. Регулировачные характеристики асинхронизированный синхронный генератор синхронный генератор АСГ в Matlab
Для поддержания напряжения синхронного генератора неизменным при
переменной нагрузке, приходится регулировать ток возбуждения If в обмотке
ротора по закону, определяемому регулировочными характеристиками,
крутизна которых зависит от характера нагрузки и ее коэффициента мощности
(рис. 4.10).
Регулировочные характеристики дают возможность установить пределы
изменения токов генератора и выбрать аппараты для регулирования
напряжения.
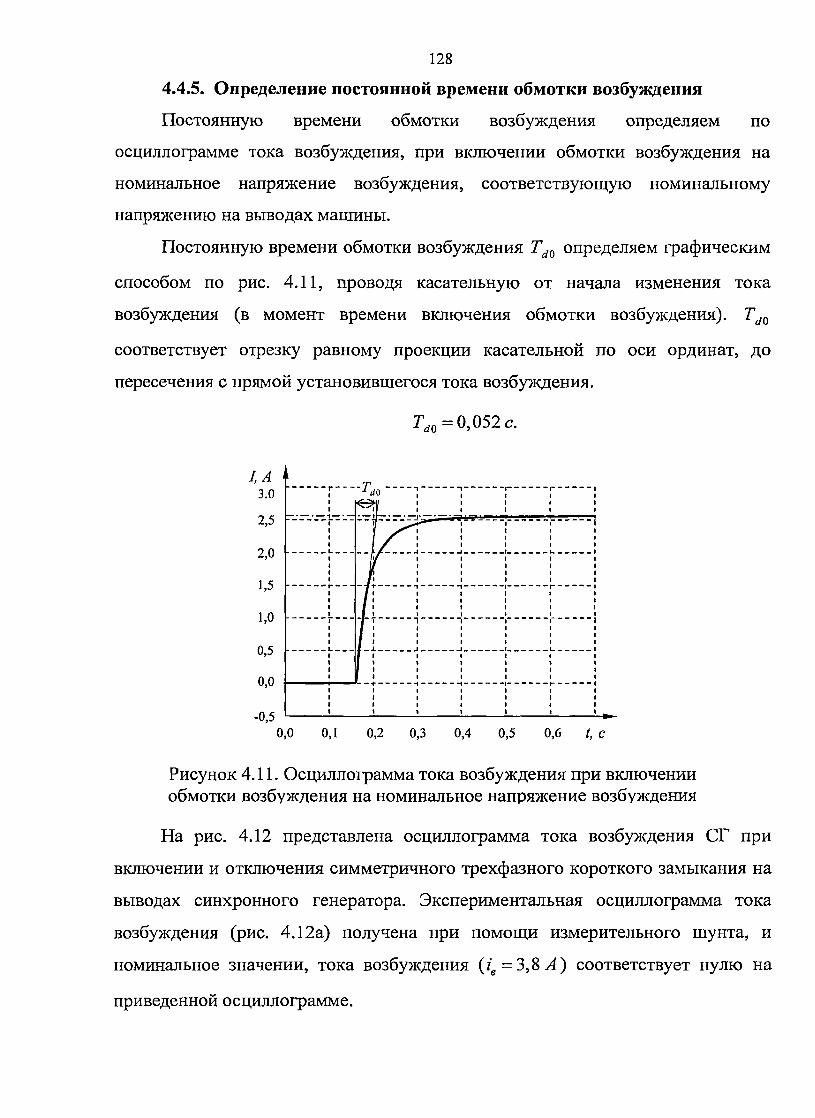
128
4.4.5. Определение постоянной времени обмотки возбуждения
Постоянную времени обмотки возбуждения определяем по
осциллограмме тока возбуждения, при включении обмотки возбуждения на
номинальное напряжение возбуждения, соответствующую номинальному
напряжению на выводах машины.
Постоянную времени обмотки возбуждения Td0 определяем графическим
способом по рис. 4.11, проводя касательную от начала изменения тока
возбуждения (в момент времени включения обмотки возбуждения). Td0
соответствует отрезку равному проекции касательной по оси ординат, до
пересечения с прямой установившегося тока возбуждения.
Td0=0,052c.
1,А
3.0
2,5
2,0
1,5
1,0
0,5
0,0
-0,5 0,0 0,1 0,2 0,3 0,4 0,5 0,6 t, с
Рисунок 4.11. Осциллограмма тока возбуждения при включении обмотки возбуждения на номинальное напряжение возбуждения
На рис. 4.12 представлена осциллограмма тока возбуждения СГ при
включении и отключения симметричного трехфазного короткого замыкания на
выводах синхронного генератора. Экспериментальная осциллограмма тока
возбуждения (рис. 4.12а) получена при помощи измерительного шунта, и
номинальное значении, тока возбуждения (ie=3,SA) соответствует нулю на
приведенной осциллограмме.
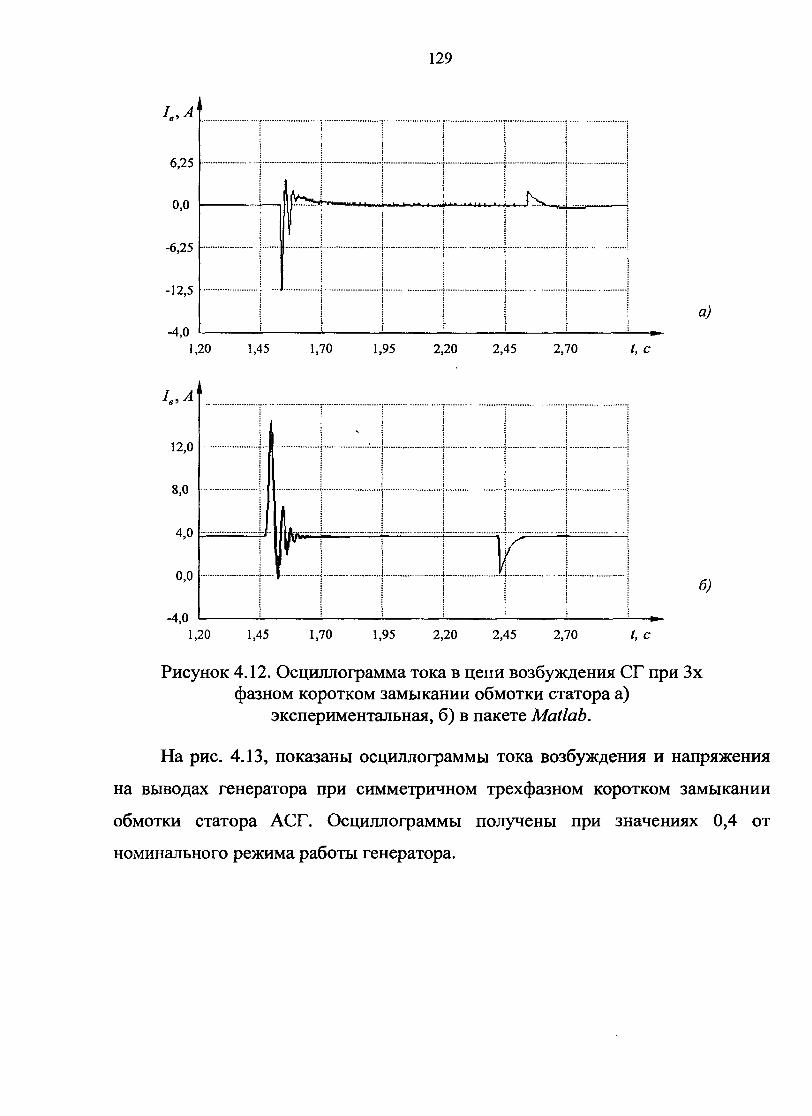
129
6,25
0,0
-6,25
-12,5
-4,0
Л,Л"
m m J *•,•.»* -*•. t * . l A J A t - ' , J, ' ' ^ ш ! I !
а;
1,20 1,45 1,70 1,95 2,20 2,45 2,70 t, с
б)
2,20 2,45
Рисунок 4.12. Осциллограмма тока в цепи возбуждения СГ при Зх фазном коротком замыкании обмотки статора а)
экспериментальная, б) в пакете Matlab.
На рис. 4.13, показаны осциллограммы тока возбуждения и напряжения
на выводах генератора при симметричном трехфазном коротком замыкании
обмотки статора АСГ. Осциллограммы получены при значениях 0,4 от
номинального режима работы генератора.
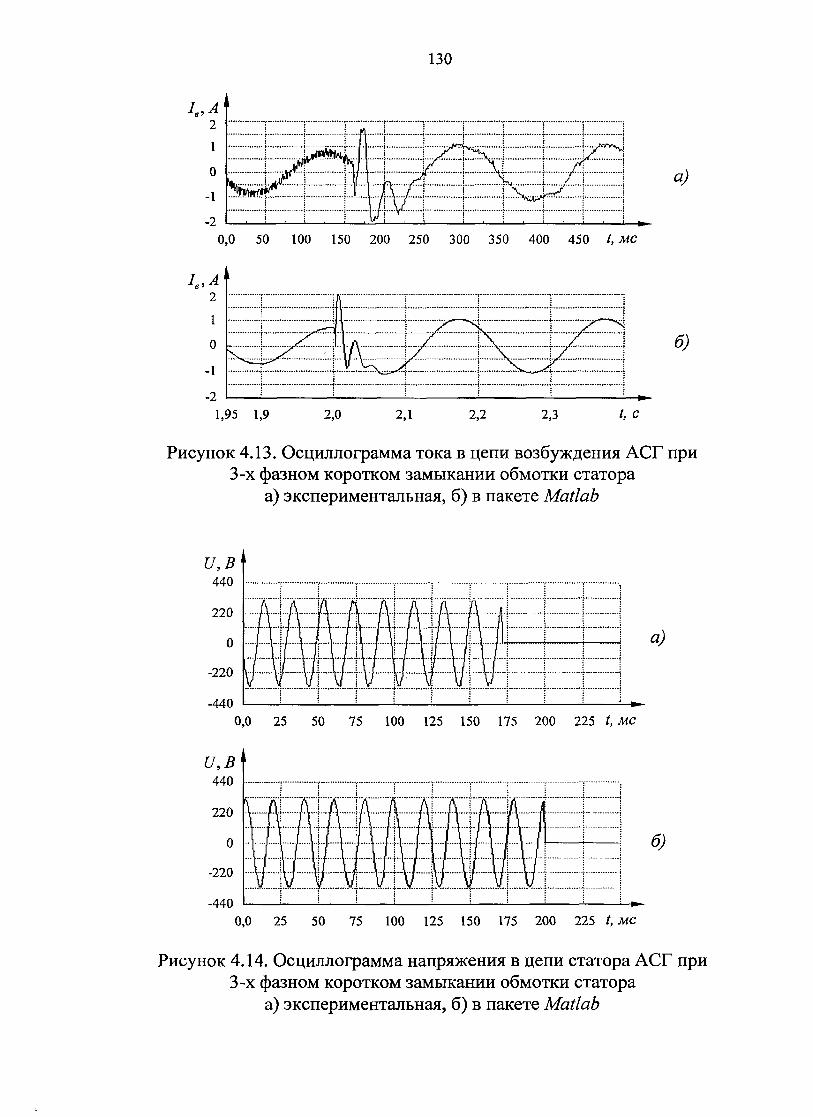
130
h,A"
a)
0,0 50 100 150 200 250 300 350 400 450 /, MC
6)
1,95 1,9
Рисунок 4.13. Осциллограмма тока в цепи возбуждения АСГ при 3-х фазном коротком замыкании обмотки статора
а) экспериментальная, б) в пакете Matlab
U, В1
440
220
0
-220
:
•"• М -••{——
\ Щч
; т
v. | 4
i
j
i ш.
а)
0,0 25 50 75 100 125 150 175 200 225 t, MC
и, В 440
220
0
-220
АЛП
1
\ Д 5-j-ft Й А Й Й-4-Д" Й- f
•W |U Ы- 1 4 -W---H" т""и 1 \г—\v—V/
\ ]
1 | б)
0,0 25 50 75 100 125 150 175 200 225 /, МС
Рисунок 4.14. Осциллограмма напряжения в цепи статора АСГ при 3-х фазном коротком замыкании обмотки статора
а) экспериментальная, б) в пакете Matlab
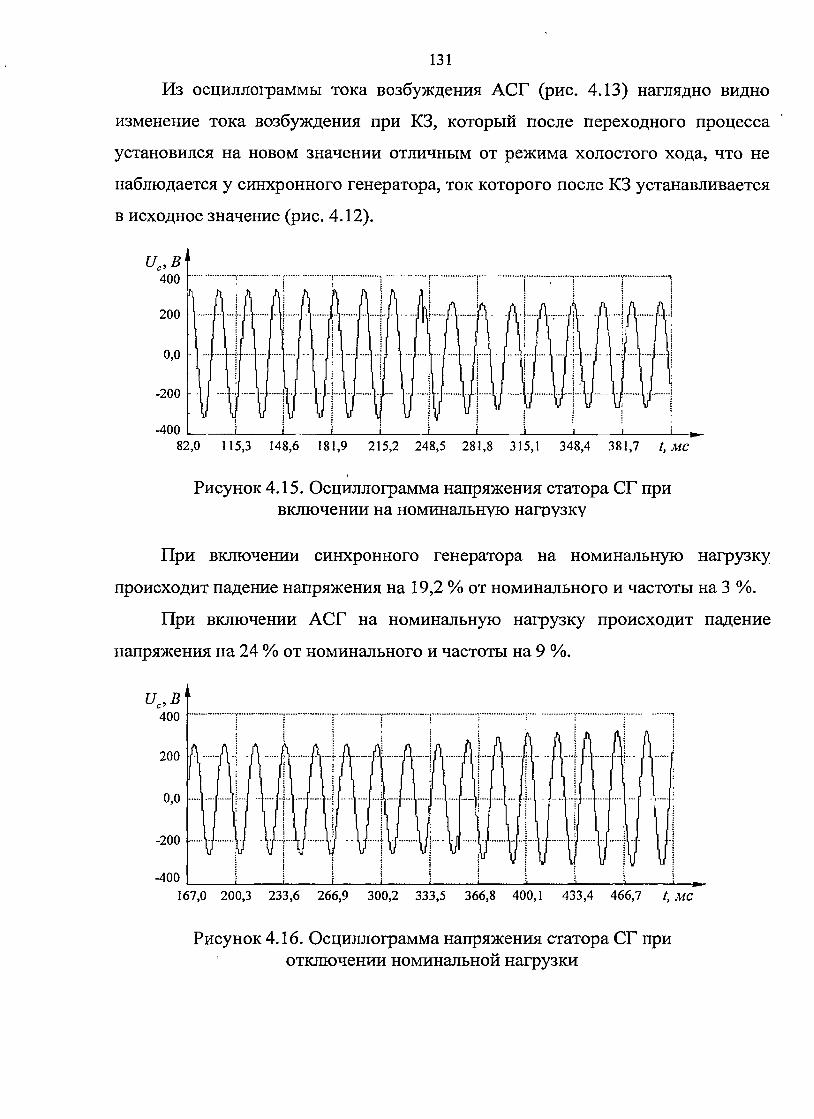
131
Из осциллограммы тока возбуждения АСГ (рис. 4.13) наглядно видно
изменение тока возбуждения при КЗ, который после переходного процесса
установился на новом значении отличным от режима холостого хода, что не
наблюдается у синхронного генератора, ток которого после КЗ устанавливается
в исходное значение (рис. 4.12).
ис,в^
82,0 115,3 148,6 181,9 215,2 248,5 281,8 315,1 348,4 381,7 t, мс
Рисунок 4.15. Осциллограмма напряжения статора СГ при включении на номинальную нагрузку
При включении синхронного генератора на номинальную нагрузку
происходит падение напряжения на 19,2 % от номинального и частоты на 3 %.
При включении АСГ на номинальную нагрузку происходит падение
напряжения на 24 % от номинального и частоты на 9 %.
ис,в> 400
200
-200
-400
167,0 200,3 233,6 266,9 300,2 333,5 366,8 400,1 433,4 466,7 t, мс
Рисунок 4.16. Осциллограмма напряжения статора СГ при отключении номинальной нагрузки
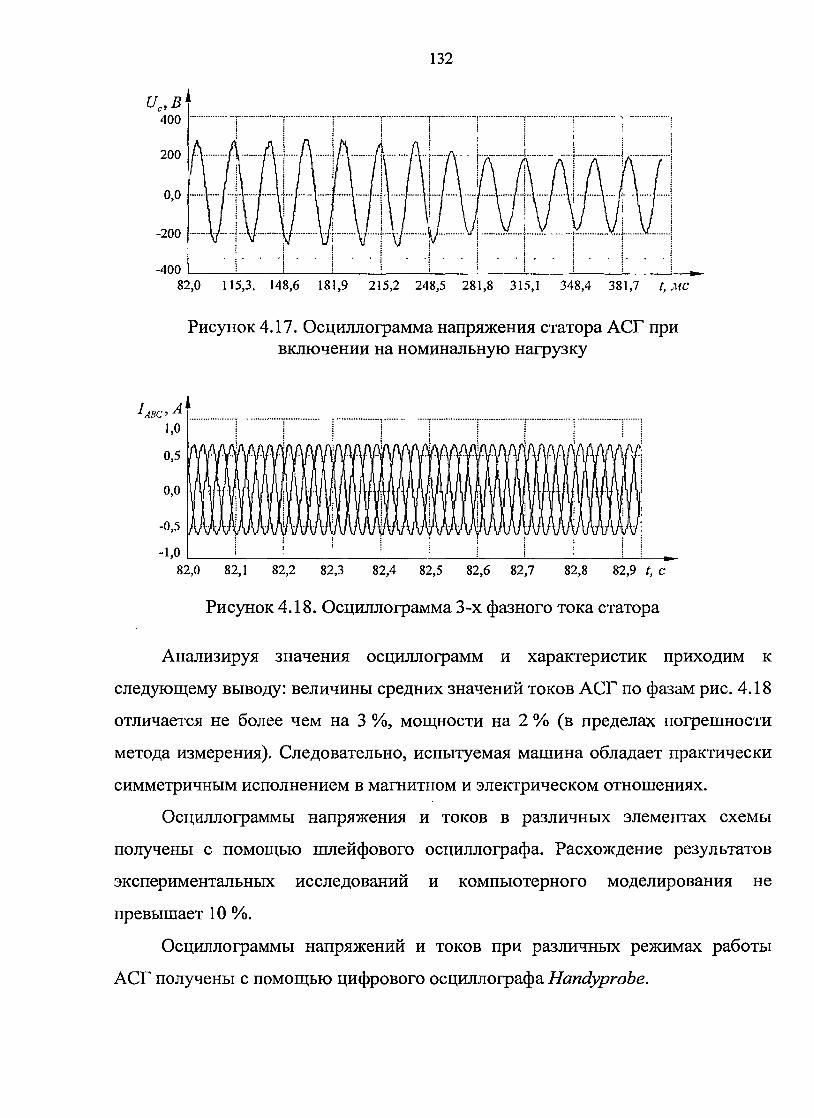
132
82,0 115,3, 148,6 181,9 215,2 248,5 281,8 315,1 348,4 381,7 t, MC
Рисунок 4.17. Осциллограмма напряжения статора АСГ при включении на номинальную нагрузку
1 ABC'л
1,0
0,5
0,0
-0,5
-1,0
,
V ill I V V v IM/1/ V if и if V 1 и V
. •
1 Мг г F'II v v V № U11V \l v i и и if f U i
82,0 82,1 82,2 82,3 82,4 82,5 82,6 82,7 82,8 82,9 t, с
Рисунок 4.18. Осциллограмма 3-х фазного тока статора
Анализируя значения осциллограмм и характеристик приходим к
следующему выводу: величины средних значений токов АСГ по фазам рис. 4.18
отличается не более чем на 3 %, мощности на 2 % (в пределах погрешности
метода измерения). Следовательно, испытуемая машина обладает практически
симметричным исполнением в магнитном и электрическом отношениях.
Осциллограммы напряжения и токов в различных элементах схемы
получены с помощью шлейфового осциллографа. Расхождение результатов
экспериментальных исследований и компьютерного моделирования не
превышает 10 %.
Осциллограммы напряжений и токов при различных режимах работы
АСГ получены с помощью цифрового осциллографа Handyprobe.
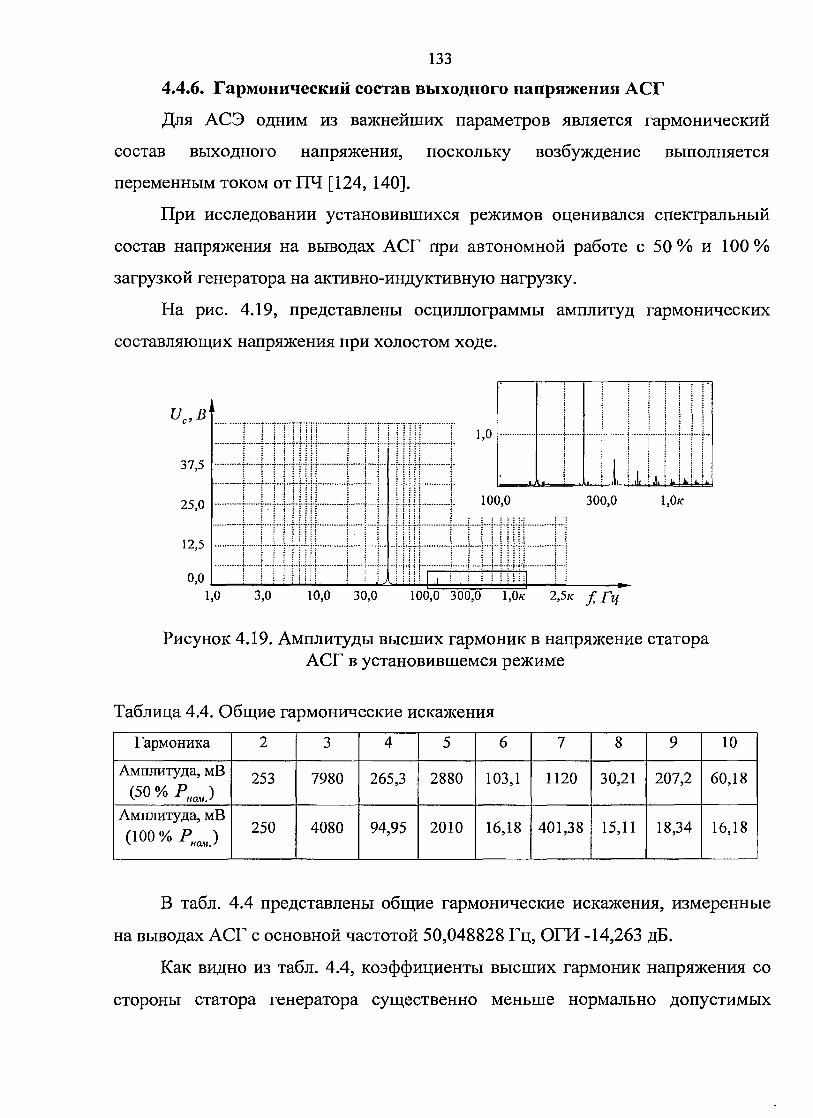
133
4.4.6. Гармонический состав выходного напряжения АСГ
Для АСЭ одним из важнейших параметров является гармонический
состав выходного напряжения, поскольку возбуждение выполняется
переменным током от ПЧ [124, 140].
При исследовании установившихся режимов оценивался спектральный
состав напряжения на выводах АСГ при автономной работе с 50 % и 100 %
загрузкой генератора на активно-индуктивную нагрузку.
На рис. 4.19, представлены осциллограммы амплитуд гармонических
составляющих напряжения при холостом ходе.
ис,в
37,5
25,0
12,5
0,0
j |
: i
—f Г "
—ГТ-Т
-444 —-;—И-
: Т'Г
;•]•; г : --р-
i i i i i J J
-ГТГГ;
-ЦЩ
: i : : :
i E i i i
: ; : i i
I : ! • i ; J
l J'0
I
.. , 4
!. 100.0 Я00.0 1 . . .
filfb" j i
....: 1 | . ...[... |,
i j .1. ; J. • i. j t • J.
1,0K-
1,0 3,0 10,0 30,0 100,0 300,0 1,0K 2,5/C f ГЦ
Рисунок 4.19. Амплитуды высших гармоник в напряжение статора АСГ в установившемся режиме
Таблица 4.4. Общие гармонические искажения
Гармоника
Амплитуда, мВ
(50% Рном)
Амплитуда, мВ
(юо%Р„О Л,)
2
253
250
3
7980
4080
4
265,3
94,95
5
2880
2010
6
103,1
16,18
7
1120
401,38
8
30,21
15,11
9
207,2
18,34
10
60,18
16,18
В табл. 4.4 представлены общие гармонические искажения, измеренные
на выводах АСГ с основной частотой 50,048828 Гц, ОГИ -14,263 дБ.
Как видно из табл. 4.4, коэффициенты высших гармоник напряжения со
стороны статора генератора существенно меньше нормально допустимых
134
значений по стандарту на качество электроэнергии ГОСТ 13109-97 и
стандартом IEC 61000-2-12. Исходя из этого, при использование ПЧ с системой
ПВМ в цепи возбуждения АСГ не требуется дополнительных мер по
улучшению качества выходного напряжения генератора [136, 141].
Исследования других показателей качества электроэнергии не
проводилось в связи с отсутствием объективных причин их несоответствия с
нормируемыми данными.
Все измерения выполненные с помощью Handyprobe проводились в
диапазоне входного напряжения до 10 В, поэтому уНР= 1,096%. Расчет
погрешности измерения обмоток генератора приведены в приложении Г.
ВЫВОДЫ ПО ЧЕТВЕРТОЙ ГЛАВЕ
1. Создана экспериментальная установка на базе учебного стенда
«Модель электрической системы» для исследования автономной работы АСГ с
преобразователем частоты ШИМ и цифровой системы управления током
возбуждения универсальной машиной переменного тока. Использование
специального контроллера, ориентированного на задачи управления АСГ,
позволяет реализовать различные алгоритмы АРВ, отвечающим высоким
требованиям ПКЭ для АСЭ.
2. Результатом проведенных серий экспериментов явилось определение
электромагнитных параметров асинхронизированного синхронного генератора.
Полученные экспериментальные данные обрабатывались в соответствии
ГОСТом и разработанной программой в пакете LabVIEW для управления
режимами работы системы и анализ электромагнитных процессов. Полученные
данные используются при математическом моделировании статических и
динамических режимов.
3. Статические характеристики качественно совпадают с
экспериментальными характеристиками, полученными при компьютерном
135
моделировании (расхождение составляет не более 8 %). Характеристика
холостого хода АСГ проходит выше, чем характеристика СГ, что обусловлено
добавочным током возбуждения. Различия между внешними и
регулировочными характеристиками этих генераторов также обусловлены
изменением тока возбуждения, зависящим от ЭДС вращения.
Установлено, что результаты компьютерного моделирования
динамических характеристик качественно совпадают с результатами
полученными в ходе экспериментальных исследования и обеспечивают 10 %
точность при математическом моделировании динамических режимов работы
АСГ.
4. Пространственно-векторная модуляция, примененная в схеме
управления трехфазного инвертора для системы возбуждения АСГ, позволяет
адаптировать режим переключения IGBT элементов к различным ситуациям,
таким как: частичная нагрузка, полная нагрузка, линейная нагрузка, нелинейная
нагрузка, статическая и переменная нагрузка, и т.д.
5. Измерения полученные в ходе эксперимента показали, что источник
ПЧ на базе IGBT-транзисторов с ПВМ, реализованном на микропроцессорной
базе в цепи возбуждения АСГ, обеспечивает хорошее качество кривой
выходного напряжения, регламентируемые ГОСТом, в различных режимах
работы АСЭ. В рассмотренных режимах работы АСЭ показатели качества
электроэнергии не выходящие за пределы нормируемых значений измеряемых
параметров.
6. Экспериментальные исследования АСГ и СГ при автономной работе
полностью подтвердили правильность теоретических выводов и результаты его
компьютерного моделирования с достаточно хорошей сходимостью.
Сравнительный анализ расчетных и экспериментальных данных показывает,
что расхождения не превышают 8-10 %, т.е. находятся в пределах допустимой
точности инженерных расчетов.
136
ЗАКЛЮЧЕНИЕ
В рамках диссертационной работы получены следующие основные
научные и практические результаты.
1. При создании автономных источников напряжения стабильной частоты
для АСЭ при переменной частоте вращения приводного двигателя
целесообразно применять АСГ, который обеспечивает высокое качество
выходного напряжения при изменении частоты вращения приводного вала.
Асинхронизированный синхронный генератор при автономной работе с
переменой частотой вращения приводного двигателя обеспечивает более
эффективное (экономичное) преобразование механической энергии в
электрическую, чем при традиционном режиме работы с синхронным
генератором, поскольку не требуется выпрямлять и затем инвертировать всю
потребляемую мощность.
2. Разработана математическая модель АСГ, которая позволяет
исследовать установившиеся и переходные процессы в АСЭ, совместно с
системой управления.
На основании дифференциальных уравнений АСГ, при автономной
работе получены уравнения установившихся режимов, связывающие
напряжения и токи генератора как объекта управления, при различном
характере возбуждения его и частоты вращения приводного двигателя.
Построены статические характеристики АСГ. Определена взаимосвязь момента
и мощности (энергетические соотношения). Получены аналитические
выражения для составляющих результирующего момента и мощности,
величины которых определяются соотношением параметров обмоток
возбуждения и значением параметра возбуждения.
3. Предложено решение построения системы АРВ для автономной
системы при переменных значениях частоты вращения ротора АСГ на базе
теории нечетких множеств. Для рассматриваемой модели синтезированы
137
система автоматического регулирования и стабилизации амплитуды и частоты
генерируемого напряжения с применением нечеткой логики.
4. Исследованы основные показатели качества электрической энергии,
регламентируемые ГОСТом, в различных режимах работы с различными
системами регулирования. Доказано, что использование нечеткого регулятора в
системе АРВ генератора позволяет обеспечить требуемые показатели качества
выходного напряжения в широком диапазоне изменения нагрузки.
Сравнительный анализ динамических режимов автономного АСГ с нечеткими
алгоритмами управления и классическими регуляторами, полученный при
компьютерном моделировании показал, что использование нечеткой логики
обеспечивает требуемую стабилизацию параметров генерируемой
электроэнергии и уменьшает время переходного процесса. Время
регулирования и значение переходного отклонения напряжения во всем
диапазоне изменения нагрузки в среднем в 1,4 раза меньше по сравнению с
использованием классического регулятора возбуждения генератора.
4. Использование нечеткого регулятора в системе АРВ генератора
позволяет обеспечить требуемые показатели качества выходного напряжения в
широком диапазоне изменения нагрузки. Сравнительный анализ динамических
режимов автономного АСГ с нечеткими алгоритмами управления и
классическими регуляторами, полученный при компьютерном моделировании
показал, что использование нечеткой логики обеспечивает требуемую
стабилизацию параметров генерируемой электроэнергии, и уменьшает время
переходного процесса и время регулирования в среднем в 1,4 раза, по
сравнению с использованием классического регулятора возбуждения
генератора.
Проведено сравнение основных показателей качества электрической
энергии в различных режимах работы АСЭ на базе АСГ. Установившееся
отклонение напряжения при включении номинальной нагрузки с cos ср = 0,8
5Uy =1,47%, а установившееся отклонение частоты равно 5/у = 0,125%,
138
коэффициент искажения синусоидальности кривой напряжения не превышает
Ки = 5%.
5. Адекватность математической модели и достоверность теоретических и
расчетных данных проверялись на основании сравнения практических
результатов, полученных на базе учебного стенда «Модель электрической
системы», с результатами расчетов, выполненных по средствам компьютерного
моделирования. Установлено, что зависимости, полученные в ходе
экспериментов при помощи измерительных приборов, достоверны и
отличаются не более чем на 10 %. Экспериментальные результаты,
сформулированные на основе результатов математического моделирования,
свидетельствуют об адекватности реальным процессам разработанных
математической и компьютерной моделей АСЭ.
Измерения полученные в ходе эксперимента показали, что источник ПЧ
на базе IGBT-транзисторов с ПВМ, реализованный на микропроцессорной базе
в цепи возбуждения АСГ, обеспечивает хорошее качество кривой выходного
напряжения, регламентируемое ГОСТом, в различных режимах работы АСЭ. В
рассмотренных режимах работы АСЭ показатели качества электроэнергии не
выходят за пределы нормируемых значений измеряемых параметров.
Сравнительный анализ расчетных и экспериментальных данных
показывает, что расхождения не превышают 8-10 %, т.е. находятся в пределах
допустимой точности инженерных расчетов.
139
Библиография
1. Блоцкий Н.Н., Мамиконянц Л.Г., Шакарян Ю.Г. Исследование и
применение асинхронизированных машин в энергетических системах.
Электричество, 1985. - № 12. - С. 2-8.
2. Радин В.И., Загорский А.Е., Шакарян Ю.Г. Управляемые электрические
генераторы при переменной частоте. - М . : Энергия, 1978. — 152 с.
3. Паластин М.Л. Электрические машины автономных источников питания. -
М.: Энергия, 1972. - 464 с.
4. Антипов К.П., Лабунец И.А., Лазарев Г.Б., Мамиконянц Л.Г., Шакарян
Ю.Г. Электромашинно-вентильные комплексы - повышение надежности и
экономичности генерирования и потребления электроэнергии. //
Электрические станции, 2005. - № 2. - С. 57-63.
5. Лабунец И.А., Шакарян Ю.Г., Лохматов А.П., Кривушкин Л.Ф., Чевычелов
В.А. Установившиеся режимы работы асинхронизированного
турбогенератора // Электричество, 1981. - № 3. - С. 23-28.
6. C.R. Kelber and W. Schumacher, "Adjustable Speed Constant Frequency
Energy Generation with Doubly-Fed Induction Machines" Proceedings of the
European Conference Variable Speed in Small Hydro, Grenoble, France, 2000.
7. Роль возобновляемых источников энергии в энергетической стратегии
России. // Материалы конференции «Бизнес и инвестиции в России»,
Москва, 2000.-157 с.
8. Перспективы развития автономных систем генерирования переменного
тока стабильной частоты / Бертинов А.И., Мизюрин СР., Бочаров В.В. и
др. // Электричество, 1988. - № 10. - С. 24-28.
9. Птицын О.В., Григораш О.В. Генераторы переменного тока. Состояние и
перспектива // Электротехника, 1994. - № 9. - С. 2-6.
10. Инновационные ресурсосберегающие решения и их экономические
оценки: Учебное пособие под ред. О.В.Федорова/М.: Инфра-М, 2003.-117с.
140
11. Атрощенко В.А., Григораш О.В., Лянчу В.В. Современное состояние и
перспективы развития систем автономного электроснабжения //
Промышленная энергетика, 1994. - № 5. - С. 33-36.
12. W. Hofmann and F. Okafor "Doubly-Fed Full-Controlled Induction Wind
Generator for Optimal Power Utilisation," Proceedings of the PEDS'01, 2001
13. Жданов П.С. Вопросы устойчивости электрических систем. Под ред. Л. А.
Жукова. - М.: Энергия, 1979. - 456 с.
14. Шакарян Ю.Г. Асихронизированные синхронные машины. М.:
Энергоатомиздат, 1984. - 162 с.
15. Брускин Д.Э. Генераторы, возбуждаемые переменным током. М.: Высш.
шк. 1974.-156 с.
16. Болоцкий Н.Н., Лабунец И.А., Шакарян Ю.Г. Машины двойного питания //
Итоги науки и техники / ВИНИТИ АН СССР, 1979.
17. Торопцев Н.Д. Асинхронные генераторы автономных систем. М.: Знак,
1997.-217 с.
18. Онищенко Г.Б., Локтева И.Л. Асинхронные вентильные Каскады и'
двигатели двойного питания. М.: Энергия, 1979. — 361 с.
19. Мамиконянц Л.Г., Шакарян Ю.Г. Асинхронизированные синхронные
генераторы: состояние, проблемы, перспективы // Электричество, 1994. -
№°3.-С. 13-18.
20. Электрические машины и трансформаторы. М.: Изд-во ВИНИТИ, 1979. —
346 с.
21. Xu L., Cheng W. "Torque and reactive power control of a doubly-fed induction
machine by position sensorless scheme.", IEEE Transactions on Industry
Applications, Vol. 31, № 3 , pp 636-642, May/June 1995.
22. Pena R., Clare J.C., Asher G.M., "Doubly fed induction generator using back-to-
back PWM converters and its application to variable-speed wind-energy
generation", IEE Proc.-Electr. Power Appl.,Vol.l43,No.3,pp.231-241, Mayl996.
141
23. Yifan Tang and Longya Xu. A flexible active and reactive power controlstrategy
for a variable speed constant frequency generating system. IEEE Transactions
on Power Electronics, 10(4): 472-478, 1995.
24. Rifai M.B., Ortmeyer Т.Н. "Dynamic analysis of a doubly fed generator in
power system applications.", Electric Machines and Power Systems, Vol. 21, pp
141-150, 1993.
25. Казовский Е.Я., Рубисов Г.В. Внезапные несимметричные КЗ синхронной
машины, включенной в мощную сеть/Исследование турбо- и
гидрогенераторов большой мощности. — Л.: Наука, 1977. - 196 с.
26. Глебов И.А. Системы возбуждения асинхронных генераторов с
управляемыми преобразователями. М.: Изд-во АН СССР, 1980. - 146 с.
27. Радин В.И., Брускин Д.Э., Зорохович А.Е. Электрические машины:
Асинхронные машины. - М . : Высшая школа, 1988. — 243 с.
28. Важнов А.И. Переходные процессы в машинах переменного тока. - Л.:
Энергия, 1980.-256 с.
29. Веников В.А. Переходные электромеханические процессы в электрических
системах: Учебник для электроэнергетических специальностей вузов. Изд.
4-е. - М.: Высшая школа, 1985. - 536 с.
30. Ульянов С.А. Электромагнитные переходные процессы в электрических
системах: учебн. для электротехн. и энерг. вузов, и фак. - М: Энергия 1970.
-517с .
31. Загорский А.Е., Шакарян Ю.Г. Управление переходными процессами в
электрических машинах переменного тока. - М.: Энергоатомиздат, 1986. —
176 с.
32. Зиновьев Г.С. Основы силовой электроники. Учеб. Пособие. - Изд 2-е,
испр. И доп. - Новосибирск: Изд-во НГТУ, 2003. - 664 с.
33. Костырев М.Л., Скороспешкин А.И. Автономные генераторы с
вентильным возбуждением. М.: Энергоатомиздат, 1993. - 212 с.
34. Бут. Д.А. Бесконтактные электрические машины. - М.: Высшая школа,
1990.-416 с.
142
35. Вольдек А.И. Электрические машины. Учебник для студентов высш. техн.
учебн. заведений. - 3-е изд., перераб. - Л.: Энергия, 1978. - 832 с.
36. Иванов-Смоленский А.В. Электрические машины. Учебник для вузов - М.:
Энергия, 1980.-928 с.
37. Радин В.И., Загорский А.Е., Белоновский В.А. Электромеханические
устройства стабилизации частоты. М.: Энергоиздат, 1981. - 168 с.
38. Балагуров В.А., Галатеев Ф.Ф. Электрические генераторы с постоянными
магнитами. М.: Энергоатомиздат, 1988. — 324 с.
39. Справочник по электрическим машинам. В 2-х т. // Под общей ред. И.П.
Копылова и Б.К. Клокова. Т.1. - М.: Энергоатомиздат. 1989. - 456 с.
40. Глебов И.А. Электромагнитные процессы систем возбуждения см. Л.:
Наука. 1987. - 264 с : ил.
41. Дмитриева Г.А. Анализ работы неуправляемой ВЭУ в автономной системе
// Электричество, 1998. - № 6. - С. 16-23.
42. Балагуров В.А. Проектирование специальных электрических машин
переменного тока. М.: Высшая школа, 1982. — 271 с.
43. Осин И.Л., Шакарян Ю.Г. Электрические машины. Синхронные машины.
М.: Высшая школа, 1990. - 242 с.
44. Григораш О.В. Современное состояние и перспективы применения
асинхронных генераторов в автономной энергетике. // Промышленная
энергетика, 1995. - № 3. - С. 29-32.
45. Принципы построения систем регулирования электроприводов с
двигателями переменного тока. / И.Л. Локтева, Г.Б. Онищенко, Т.В.
Плотникова, Ю.Г. Шакарян // Электричество. 1978. - №5. - С. 19-22.
46. Сонин Ю.П., Прусаков Ю.И. Перегрузочная способность машины
двойного питания в режиме вентильного двигателя. // Электричество. 1986.
- № 7 . - С . 14-21.
47. Горев А.А. Переходные процессы синхронных машин. - М.: Наука. 1985.
48. Ботвинник М.М. Основы теории переходных процессов синхронных
машин. - Л.: Госэнергоиздат 1960. - 358 с.
143
49. Электрические системы: Управление переходными режимами
электроэнергетических систем / В.А. Веников, Э.Н. Зуев и др. — М.: Высш.
шк., 1982.-317 с.
50. Стернинсон Л.Д. Переходные процессы при регулировании частоты и
активной мощности в электрических системах. — М.: Энергия, 1975. —328 с.
51. Сипайлов Г.А. и др. Электрические машины (специальный курс): Учеб.
Для вузов по спец. «Электрические машины» / Г.А. Сипайлов, Е.В.
Кононенко, К.А. Хорьков - 2-е изд., перераб. и доп. - М.: Высш. шк., 1987.
-287 с.
52. Копылов И.П. Математическое моделирования электрических машин.
Учеб. для вузов. - 3-е изд., перераб. И доп. - М.: Высш. Шк., 2001. - 327 с :
53. Самородов Г.И., Хорошев Н.И. О системе замещения синхронного
генератора при расчетах электромагнитных переходных процессов. — Тр.
СибНИИЭ, 1976. вып. 31. - 127 с.
54. Зарубин B.C. Математическое моделирование в технике: Учеб. для вузов /
Под ред. B.C. Зарубина, А.П. Крищенко. - М.: Изд-во МГТУ им. Н.Э.
Баумана, 2001. — 496 с. (Сер. Математика в техническом университете;
Вып. CCI, заключительный).
55. Дьяконов В. MATLAB: Учебный курс. СПб.: Питер, 2001. - 287 с.
56. Дьяконов В., Круглов В. Математические пакеты расширения MATLAB
5.0/5.3. Система символьной математики. - М.: Нолидж, 1999. - 328 с.
57. Мартынов Н.Н., Иванов А.П. MATLAB 5.x: Вычисления, визуализация,
программирование. М.: КУДИЦ - ОБРАЗ, 2000. - 265 с.
58. Барков В.А. Определение функции регулирования и анализ
установившегося режима работы электропривода с двигателем двойного
питания при переменной скорости вращения // Изв. вузов. Энергетика,
1 976 . -№5. -С . 7-15.
59. Онищенко Г.Б., Шакарян Ю.Г., Локтева И.Л. Некоторые принципы синтеза
систем регулирования электропривода переменного тока. //
144
Электрофикация и автоматизация промышленных установок, вып.
118/ВЗПИ, 1978. - С. 24-36.
60. Айзенштандт Е.Б., Шакарян Ю.Г. О законе регулирования напряжения
статора и ротора АСД, работающего в автономной системе //
Электротехника. 1973. - № 11. - С. 8-16.
61. Шакарян Ю.Г., Читечян В.И., Арутюнян М.В. Автономный
асинхронизированный генератор с возбуждением от источника с высшими
гармоническими э.д.с. // Электричество, 1985. - № 9. - С. 28-32.
62. Гумановский Б.Я., Самулев В.И., Бурда Е.М. Особенности статических
режимов машин двойного питания малой мощности // Электричество,
1982. - № 3 . - С. 32-41.
63. Браславский В.Я. и др. Преобразователь частоты для МДП с расширенным
диапазоном регулирования скорости // Проблемы преобразовательной
техники. Ч. 5. Киев: ИЭД АН УССР, 1983. - 142 с.
64. Пат. 2014724 Российская Федерация, МПК Н 02 Р 9/14, Способ
адаптивного регулирования возбуждения синхронного генератора/
Романов СВ.; заявитель и патентообладатель Романов С.В, №4882526/07;
заявл. 15.11.1990; опубл. 15.06.1994; Бюл. № 27/2000. - 6 с.
65. Пат. 2237346 Российская Федерация, МПК Н 02 Р 9/14. Способ и
устройство регулирования возбуждения синхронного генератора/ Козлитин
Л.С.; заявитель и патентообладатель Дальневосточный государственный
технический университет № 2000123116/09; заявл. 05.09.2000; опубл.
05.09.2000; Бюл. № 27/2000. - 9 с.
66. Пат. 94007102 Российская Федерация, МПК Н 02 Р 9/42 Электромашинный
агрегат для получения постоянной частоты и напряжения при
изменяющейся скорости вращения приводного двигателя патент/ Сугаков
В.Г.; Лобанов О.В.; заявитель и патентообладатель Калининградское
высшее инженерное училище инженерных войск, № 94036292/07; заявл.
28.09.1994; опубл. 27.07.1996; Бюл. № 27/2000. - 6 с.
145
67. Микропроцессорный автоматический регулятор возбуждения для
асинхронизированных электромеханических преобразователей частоты /
В.А. Александров, В.Г. Клещенко, В.П. Морозкин и др. // Электричество,
1991.-№ 7 . -С. 17-23.
68. Круглов В.В., Борисов В.В. Искусственные нейронные сети. Теория и
практика. - М.: Радио и связь, 2000. - 226 с.
69. Заде Л. Понятие лингвистической переменной и ее применение к принятию
приближенных решений. - М.: Мир, 1976. - 167 с.
70. Yager R., Filev D. Essential of Fuzzy Modeling and Control. - John Willey &
Sons, 1994.-388 p.
71. Fuzzy Logic Toolbox. User's Guide, Version 2. - The Math Works, Inc., 1999.
72. Optimization Toolbox. User's Guide, Version 2. - The Math Works, Inc., 1999.
73. Катковник В. Я. Непараметрическая идентификация и сглаживание
данных: метод локальной аппроксимации. - М.: Наука, 1985. - 326 с.
74. Lown М., Swidenbank Е., Hogg B.W. Adaptive fuzzy logic control of a turbine
generator system. - IEEE Transaction on energy conversion, December 1997.
vol.12, 34.
75. Леоненков A.B. Нечеткое моделирование в среде MATLAB и fuzzyTECH. -
СПб.: БХВ - Петербург, 2005. - 736 с.
76. Шакарян Ю.Г., Плотникова Т.В. Синтез функций регулирования
асинхронизированных синхронных машин с использованием теории
инвариантности. // Известия АН СССР. Энергетика и транспорт, 1980. № 3.
77. Ротштейн А.П. Интеллектуальные технологии идентификации: нечеткая
логика, генетические алгоритмы, нейронные сети. - Винница:
УНИВЕРСУМ - Винница, 1999. - 320 с.
78. Митюшкин Ю.И., Мокин Б.И., Ротштейн А.П. SoftComputing:
идентификация закономерностей нечеткими базами знаний. — Винница:
УНГОЕРСУМВшниця, 2002. - 145 с.
79. Rotshtein A. Desig and Tuning of Fuzzy Rule Based System for Medical
Diagnosis // In Fuzzy and Neuro Fuzzy Systems in Medicine / Ed.
146
Teodorescu N. H. - CRC-Press, 1998. - P. 243-289.
80. Ротштейн А.П., Кательников Д.И. Идентификация нелинейных
зависимостей нечеткими базами знаний // Кибернетика и системный
анализ. - 1998. - № 5. - С. 53-61.
81. Ротштейн А.П., Митюшкин Ю.И. Извлечение нечетких правил из
экспериментальных данных с помощью генетических алгоритмов //
Кибернетика и системный анализ. — 2001. - № 3. — С. 45-53.
82. Ротштейн А.П., Штовба С.Д. Влияние методов деффазификации на
скорость настройки нечеткой модели // Кибернетика и системный анализ. —
2 0 0 2 . - № 5 . - С . 169-176.
83. Zimmermann H.J. Fuzzy Set Theory and its Applications. 3rd ed. - Dordrecht:
Kluwer Academic Publishers, 1996. - 315 p.
84. Rodriguez-Amenedo L. "Automatic Generation Control of a Wind Farm With
Variable Speed Wind Turbines," IEEE Transactions on Energy Conversion, Vol
17, No. 2, June 2002.
85. Универсальный метод расчета электромагнитных процессов в
электрических машинах. Иванов-Смоленский А. В. и др. М.:
Энергоатомиздат, 1986.-235 с.
86. Горюнов Ю.П., Смоловик СВ. Математические модели элементов
электроэнергетических систем и исследование их динамических свойств.
Системы координат. Уравнения синхронной машины: Учебное пособие.
СПб: СПбГТУ, 1992. - 80 с.
87. Гультяев A.K. MATLAB 5.2. Имитационное моделирование в среде
Windows: Практическое пособие. - СПб.: КРОНА - принт, 1999. - 228 с.
88. Muller S., Deicke М., De Doncker R.W. "Adjustable Speed Generators for Wind
Turbines based on Doubly-fed Induction Machines and 4-Quadrant IGBT
Converters Linked to the Rotor", 35th Annual Meeting - IEEE Ind. App. Soc.
(IAS), Rome, Italy, Oct. 8-12, 2000.
89. Герман-Галкин С.Г. Компьютерное моделирование полупроводниковых
систем. СПб.: КОРОНА принт, 2001. - 320 с.
147
90. Дьяконов В. Simulink 4. Специальные справочник. - СПб: Питер, 2002. —
528 с.
91. Демирчян К.С., Бутырин П.А. Моделирование и машинный расчет
электрических цепей: Учеб. Пособие для электр. и электроэнерг. спец.
Вузов. - М.: Высш. шк., 1988. - 335 с.
92. Семенов В.В. Анализ режимов работы энергетических систем в пакете
MATLAB // Всероссийская молодежная научно-техническая конференция
«Интеллектуальные системы управления и обработки информации» Уфа.
2003.-С. 215.
93. Веников В .А., Веников Г.В. Теория подобия и моделирования
(применительно к задачам электроэнергетики): Учебник для вузов по спец.
«Кибернетика электр. систем». — 3-е изд., перераб. и доп. - М.: Высш. шк.,
1984.-439 с.
94. Сивокобыленко В.Ф., Меженкова М.А. Математическое моделирование
электромеханических переходных процессов на электрических станциях. //
Электричество, 2001. - № 4. - С. 5 - 9.
95. Семенов В.В., Семенов В.В. Модель синхронного генератора с
симметричными магнитными параметрами в пакете Matlab / Известия
академии инженерных наук им. A.M. Прохорова «Юбилейный 15 — й том
посвященный столетию со дня рождения A.M. Бамдаса и Ю.Л. Мукосеева»
/ Под. ред. Ю.В. Гуляева. - Москва - Н. Новгород.: НГТУ, 2005. Т. 15. - С.
184-187.
96. Семенов В.В. Виртуальная модель асинхронизированного синхронного
генератора автономных систем // Сборник докладов международной
научно-технической конференции «Энергетика и энергоэффективные
технологии», часть 2, Липецк 2006. - С. 14-17.
97. Электронный каталог SimPowerSy stems. For use with Simulink
[Электронный ресурс], [2006-]. - Режим доступа: www.mathworks.com.
98. Электронный каталог Matlab Simulink & Toolboxes [Электронный ресурс],
[2006-]. — Режим доступа: www.mathworks.com.
148
99. Лоханин Е.К, Васильева Г. В., Галактионов Ю. И. Математическая модель
энергосистемы для расчета и анализа переходных процессов и
устойчивости. - Тр. ВНИИЭ. вып 51. - М.: Энергия, 1976. - 347 с.
ЮО.Демирчян К С , Бутырин П.А. Моделирование и машинный расчет
электрических цепей: Учеб. Пособие для электр. и электроэнерг. спец.
Вузов. - М.: Высш. шк., 1988. - 335 с.
101. Бессонов Л.А. Теоретические основы электротехники: Электрические
цепи. Учеб. для студентов электротехнических, энергетических и
приборостроительных специальностей вузов. — 7-е изд., перераб. и доп. —
М.: Высш. шк., 1978. - 528 с.
102. Лазарев Ю. Моделирование процессов и систем в MATLAB. Учебный
курс. - СПб.: Питер; Киев: Издательская группа BHV, 2005. — 512 с : ил.
103. Верно С , Цек 3. Математическое моделирование элементов
энергетических систем. - М.: 1985. - 313 с.
104. ГОСТ 14228-80. Дизели и газовые двигатели автоматизированные. — Введ.
1980-11-28. - М.: Изд-во стандартов, 1984. - 32 с.
105. ГОСТ 10511-83. Системы автоматического регулирования частоты
вращения (сарч) судовых, тепловозных и промышленных дизелей. Общие
технические требования. - Введ. 1983-12-06. - М.: Изд-во стандартов,
1984.-14 с.
106. Супрун Г.Ф. Синтез систем электроэнергетики судов. - Л.: Судостроение,
1972.-326 с.
107. Мелешкин Г.А. Переходные режимы судовых электроэнергетических
систем. Л.: Судостроение, 1971. - 344 с.
108. Рудаков В.В., Столяров И.М., Дартау В.А. Асинхронные электроприводы с
векторным управлением. Л.: Энергоатомиздат, 1987.-276 с.
Ю9.Куропаткин П.В. Теория автоматического управления. М.: Высшая школа,
1973.-375 с.
llO.Ramuz D., Mirzaian A., Kauffmann J.M., Tnani S., Godfroid H. "Control
strategy of double fed machine for variable speed drives.", proceedings of ICEM
149
98, Istanbul, Sept. 1998, pp. 1340-1345.
111.Jang J.S. ANFIS: Adaptive network based fuzzy inference systems // IEEE
Trans, on Systems, Man, and Cybernetics. - 23(03). - May 1993. - P.665-685.
112. Семенов B.B., Султангалеев P.H. Нечеткое управление
асинхронизированным синхронным генератором при автономной работе /
Электромеханика, электротехнические комплексы и системы:
Межвузовский научный сборник Уфа. 2007. - С. 103 - 106.
ИЗ. Семенов В.В. Оптимизация переходных процессов асинхронизированного
синхронного генератора при автономной работе / Мавлютовские чтения:
Всероссийская молодежная научная конференция Том 2 Уфа, 2007. - С. 38.
П4.Евдокунин Г.А. Смоловик СВ. Математическое моделирование элементов
электроэнергетических систем - Л.: 1980. — 168 с.
115. Семенов В.В., Рогинская Л.Э., Султангалеев Р.Н. Имитационная модель
асинхронизированного синхронного генератора при автономной работе //
Вестник саратовского государственного технического университета
№1(23). выпуск 3, 2007. - С. 110 - 116.
116. Лабунец И.А., Лохматов А.П., Шакарян Ю.Г. Режимы работы, статические
и динамические характеристики асинхронизированных турбогенераторов.
-Киев, 1987.-45 с.
117. Семенов В.В. Математическое моделирование переходных процессов
синхронного генератора. Межвузовский научный сборник
«Электромеханика, электротехнические комплексы и системы» Уфа. 2003.
- С . 147-150.
118. Программа расчета переходных процессов в синхронном генераторе /
Семенов В.В., Рогинская Л.Э., Султангалеев Р.Н. / Свидетельство об
официальной регистрации программы для ЭВМ №2006613589. - М.:
РосАПО, 2006.
119. Программа расчета динамических режимов работы асинхронизированного
синхронного генератора с системой стабилизации параметров на базе
нечеткой логики / В.В. Семенов, Л.Э. Рогинская, Р.Н. Султангалеев /
150
Свидетельство об официальной регистрации программы для ЭВМ
№2007613666. - М.: РосАПО, 2007.
120. Налимов В.В. Теория эксперимента. - М . : Наука, 1971. -207 с.
121. Шенк X. Теория инженерного эксперимента. — М.: Мир, 1972. - 380 с.
122. Семенов В.В., Султангалеев Р.Н. Автономные системы электроснабжения
с асинхронизированными синхронными машинами // Межвузовский
научный сборник «Электромеханика, электротехнические комплексы и
системы» Уфа. 2006. - С. 220 - 224.
123. Семенов В.В. Асинхронизированные генераторы автономных
электрических систем // Сборник научных трудов «Анализ, синтез и
управление в сложных системах» Саратов 2006. - С. 24 - 27.
124. ГОСТ 13109-97. Электрическая энергия. Совместимость технических
средств электромагнитная. Нормы качества электрической энергии в
системах электроснабжения общего назначения. - Введ. 1999-01-01. - М.:
Изд-во стандартов, 1999. - 31 с.
125. Загидуллин Р.Ш. Lab View в исследованиях и разработках. - М.: Горячая
линия - Телеком, 2005. — 352 с.
126. Суранов А.Я. Lab VIEW 7: справочник по функциям. - М.: ДМК Пресс,
2005.-512 с.
127.Шакарян Ю.Г. Перспективы применения силовых полупроводниковых
преобразователей в системах генерирования электроэнергии. // Новые
технологии. 1999. - № 2. - С. 34-41.
128.Козярук А.Е. Системы прямого цифрового управления в асинхронном
приводе // Труды III международной (XIV Всероссийской) конференции по
автоматизированному электроприводу / НГТУ, Н. Новгород, 2001. —237 с.
129.Шрейнер Р.Т., Кривовяз В.К., Управление непосредственным
преобразователями частоты с ШИМ в системах приводов переменного
тока. // Электричество, 2007. - № 5. - С. 26-37.
151
130. Тиристорные преобразователи частоты в электроприводе. / А.Я.
Бернштейн, Ю.М. Гусяцкий, А.В. Кудрявцев, Р.С. Сарбтов; Под ред. Р.С.
Сарбатова. М.: Энергия, 1980. - 246 с.
131.Джюджи Л., Пелли Б. Силовые полупроводниковые преобразователи
часты: Пер. с англ. М.: Энергоатомиздат, 1983. - 425 с.
132.Козярук А.Е., Плахтина Е.Г. Вентильные преобразователи в судовых
электромеханических системах. Л.: Судостроение, 1987. - 312 с.
133.Жемеров Г.Г. Тиристорные преобразователи частоты с непосредственной
связью. М.: Энергия, 1977. - 280 с.
134. Четти П. Проектирование ключевых источников электропитания. — М.:
Энергоатомиздат, 1990. -240 с.
135.D. Maksimovic, A. Stankovi'c, V. Thottuvelil, "Modeling and simulation of
power electronic converters," Proc. IEEE, vol. 89, pp. 898-912, 2001.
136. ГОСТ 10169-77. Машины электрические трехфазные синхронные. Методы
испытания. -Введ. 1977-01-28. - М . : Изд-во стандартов, 1983. - 85 с.
137. ГОСТ 11828-86. Машины электрические вращающиеся. Общие методы
испытаний. - Введ. 1986-08-15. - М.: Изд-во стандартов, 1987. - 42 с.
138. ГОСТ 27222-91 (МЭК 279-69). Машины электрические вращающиеся.
Измерение сопротивления обмоток машин переменного тока. - Вед. 1991—
01-30. - М.: Изд-во стандартов, 1999. - 20 с.
139. Жерве Г.К. Промышленные испытания электрических машин. - 4-е изд.
сокр. и перераб. - Л.: Энергоатомиздат, 1984. - 408 с.
140.ГОСТ Р 50783-95. Электроагрегаты и передвижные электростанции с
двигателями внутреннего сгорания. Общие технические требования. —
Введ. 1996-01-01. - М . : Изд-во. стандартов, 1995.-28 с.
141.Жежеленко И.В. Показатели качества электроэнергии и их контроль на
промышленных предприятиях. М.: Энергоатомиздат, 1986. - 364 с.
142.Гольдберг О. Д., Гурин Я.С, Свириденко И. С. Проектирование
электрических машин.- М.: Высшая школа, 2001. — 312 с.

ПРИЛОЖЕНИЕ А
МЕТОДИКА РАСЧЕТА УНИВЕРСАЛЬНОЙ МАШИНЫ
153 П
МЕТОДИКА РАСЧЕТА УНИВЕРСАЛЬНОЙ МАШИНЫ
1.1 Начальные условия:
- мощность машины, Рг: 0,37 кВт;
- высота оси вращения, h: 63 мм;
- напряжение питания, UH: 380 В (при соединении обмоток в «звезду»,
220 В (при соединении обмотки статора в «треугольник»);
- номинальная частота вращения, п: 1380 об/мин (синхронная частота
вращения 1500 об/мин).
1.2 Магнитная цепь двигателя. Размеры, конфигурация, материал
1.2.1 Высота оси вращения (табл. 9-1) [142],
h = 63 мм.
1.2.2 Наружный диаметр сердечника (табл. 9-2) [142],
£>Я1=108 мм.
1.2.3 Внутренний диаметр сердечника статора (табл. 9-3) [142],
Д = 0,68£>Я1 - 5 = 0,68 • 108 - 5 = 165 мм.
1.2.4 Коэффициент нагрузки (рис. 9-1) [142],
кн =0,946.
1.2.5 Предварительное значение КПД (рис. 9-2) [142],
•п' = 0,68.
1.2.6 Предварительное значение (рис. 9-3) [142],
cos ф'= 0,73.
1.2.7 Расчетная мощность (1-11) [142],
р , = _ ^ _ = 0 , 9 4 6 . 3 7 0 = т
T/COS^' 0,68-0,73
1.2.8 Электромагнитная нагрузка (рис. 9-4, табл. 9-5) [142],
4 ' = 180 А/см.
154 П.А
1.2.9 Магнитная индукция в воздушном зазоре при номинальном режиме
(рис. 9-4, табл. 9-5) [142],
B's = 0,8l Тл.
1.2.10 Предварительное значение обмоточного коэффициента
^ОБ\ = 0 ,91 .
1.2.11 Длина сердечника статора (1-30) [142],
, 8,62-107Р' 8,62-107-705 /, = —\ —- = —= 1 = 66,04 м м -1 DfnxAxB&k'om 682-1500-180-0,81-0,91
1.2.12 Конструкторская длина сердечника статора (§ 9-3) [142],
Конструкторскую длину необходимо принимать такую, что отношение
длины сердечника к его диаметру X было максимально приближено к
максимально допустимому значению А,тах.
Таким образом, длина сердечника
1Х = 90 мм.
1.2.13 Отношение длины сердечника к его диаметру (9-2) [142],
^ = i = ̂ = l,324. Д 68
1.2.14 Отношение длины сердечника к его диаметру для максимального
значения
^=1,46-0,000711)^=1,46-0,00071-108 = 1,383.
1.3 Сердечник статора
Марка стали 2013, толщина стали 0,5 мм, изолировка — оксидирование.
1.3.1 Коэффициент заполнения сталью (§ 9-3) [142],
£с = 0,97.
1.3.2 Количество пазов на полюс и фазу (табл. 9-8) [142],
?!=2.
1.3.3 Количество пазов сердечника статора (9-3) [142],
zx=2pmxqx =4-3-2 = 24.
155 П.А
1.4 Сердечник ротора
Марка стали 2013, толщина стали 0,5 мм, изолировка - оксидирование.
1.4.1 Коэффициент заполнения сталью (§ 9-3) [142],
£с = 0,97.
1.4.2 Скос пазов (§ 9-3) [142],
Рск=\,0.
1.4.3 Среднее значение воздушного зазора (табл. 9-9) [142],
£ = 0,25 мм.
1.4.4 Наружный диаметр сердечника ротора (9-5) [142],
DH2=Dl-2S = 6S-2-0,25 = 67,5 мм.
1.4.5 Внутренний диаметр листов ротора (9-6) [142],
£>2 = 0,23-£>Я1=21 мм.
1.4.6 Длина сердечника ротора (§ 9-3) [142],
/2 = /j = 90 мм.
1.4.7 Количество пазов сердечника ротора (табл. 9-12) [142],
z 2 = 1 8 .
1.5 Обмотка статора
Принимаем двухслойную всыпную обмотку (табл. 9-4) [142], из провода
марки ПЭТ-155 (класс нагревостойкости F) [142], укладываемую в
трапецеидальные полузакрытые пазы.
1.5.1 Коэффициент распределения (9-9) [142],
kPl= ^ ^ - о - = ^ = 0,966. РХ . 6 0 ° ~ • 60-я-
* 8 Ш ^ 2 8 Ш ^ 8 0 "
1.5.2 Укорочение шага (§ 9-4) [142],
Д = 1 .
156 П. А
1.5.3 Диаметральный шаг по пазам (9-10) [142],
Ут ~ = = 6 • 771 2р 2-2
1.5.4 Обмоточный коэффициент (9-13) [142],
кОБХ = кРХкух = 0,966 • 1 = 0,966.
1.5.5 Предварительное значение магнитного потока (9-14) [142],
= В'Р/г^ = 0.B1-68-9Q.10-* = . 1 0 . з в б
Р 2
1.5.6 Предварительное количество витков в обмотке фазы (9-15) [142],
т> - к ^ - 0,98-220 1 _ f 50 - ^ z .
222кот Ы±)Ф' 222 • 0,966 1,82 • 10"3
0 5 1 v50 50
1.5.7 Количество параллельных ветвей обмотки статора (§ 9-4) [142],
ах=\.
1.5.8 Предварительное количество эффективных проводников в пазу
[142],
й ^ _ 3 9 2 ^
РЧ\ 2-2 1.5.9 Уточненное количество витков в обмотке фазы (9-17) [142],
Ю | = ^ ™ = 9 8 ^ 2 = 3 9 2
а{ 1
1.5.10 Уточненное значение магнитного потока (9-18) [142],
Ф = Ф'-^- = 2,48-Ю-3 — = 2,48-10"3 Вб. ох 392
1.5.11 Уточненное значение индукции в воздушном зазоре (9-19) [142],
В.=В'^- = 0 , 8 1 — = 0,8 Тл. а>х 392
1.5.12 Предварительное значение номинального фазного тока (9-20) [142],
/ , - „ f ' : 1 0 i . . = . . . . 3 ! ° - . - . = 1 , 0 9 7 А . Зи^'соБф' 3-220-0,7-0,73
157 П. А
1.5.13 Уточненная линейная нагрузка статора (9-21) [142],
= 10 г̂,/, = 10-98.24.1,097 = 1 2 Ш ^ KDXCLX п • 68 • 1
1.5.14 Среднее значение магнитной индукции в спинке статора (табл. 9-
13) [142],
ВС1 =1,55 Тл.
1.5.15 Зубцовое деление по внутреннему диаметру статора (9-22) [142],
тгЦ я-408 о л
L = L = = 8,9 мм. 1 zx 24
1.5.16 Среднее значение магнитной индукции в зубцах статора (табл. 9-
14) [142],
Я31=1,75Тл.
1.5.17 Ширина зубца (9-23) [142],
JA_= 8,9.0,8 31 £СЯ51 0,97-1,75
1.5.18 Высота спинки статора (9-24) [142],
Ф-106 1,8-10-3-106
пг, = = = 9,1 мм. С1 2кс1хВсх 2- 0,97 -1,13 -1,55
1.5.19 Высота паза (9-25) [142],
Dm-Dx , 108-68 / г Я 1 = - ^ — L - ^ C 1 = 2 9,1 = 10,9 мм.
1.5.20 Большая ширина паза (9-26) [142],
*(Ц+2„т) *№ + 2Л0,9) ы м
1 z, 31 24
1.5.21 Предварительное значение ширины шлица (9-34) [2],
^ = 0 , 3 ^ = 0,3763=2,4 мм.
1.5.22 Меньшая ширина паза (9-27) [2],
^ = ^ ( Д + 2й Д У 1 -6 ш ) -2 1 & я = ^а08 + 2-0 > 5-2,4)-48-5_ 5 Л 6 м м
Zj - ж 2 4 - я -
158 П
1.5.23 Проверка (9-28) [2],
*i(&i ~b2) + n(b2 -Ьш)- 2n(hm -hm) =
= 24(7,52- 5,16) + я-(5,16- 2,4) -2яг(10,9- 0,5) = 0.
1.5.24 Площадь поперечного сечения паза в штампе (9-29) [142],
_bi+b2 , b2 - 6 ^ _ °У71 ~~ « VV71 ™ЯЛ ~ / ~~
5,16 + 2 , 4 / 1 Л Л л с 5,16-2,4, сп п 2 •(10,9-0,5—- — ) = 57,2 W 2 ч 2
1.5.25 Площадь поперечного сечения паза в свету (9-30) [142],
S'm = ( ^ - *с)№я1" V , " ^ ^ - К) =
= ( 5 Л 6 ± 2 1 4 _ 0 > 1 ) ( 1 0 9 _ 0 > 5 _ 5 Д 6 - 4 1 2 4 _ ( ) д ) = 5 5 Д л ш 2
1.5.26 Площадь поперечного сечения корпусной изоляции (9-31) [142],
Su = bm(2hm +bx+ b2) = 0,2(2 • 10,9 + 5,6 + 2,4) = 6,9 мм 2.
1.5.27 Площадь поперечного сечения прокладок (9-32) [142],
Snp = 0,56, + 0,7562 = 0,5-10,9 + 0,75• 2,4 = 7,6 мм 2.
1.5.28 Площадь поперечного сечения паза, занимаемая обмоткой [142],
S"m=S'm-Su-Snp= 57,2-55,7-7,6 = 41,1 мм 2 .
1.5.29 Произведение c(d'f (9-36) [142],
Nm 98
где кп — коэффициент заполнения паза.
1.5.30 Количество элементарных проводов [142],
с = 1.
1.5.31 Расчетный диаметр элементарного изолированного провода
d,= к А O ^ 4 U = 0 > 5 5 6 M M 1
Nmc V 98-1
1.5.32 Диаметры элементарного изолированного и неизолированного
провода (приложение 1, [142])
сГ = 0,42 мм; d = 0,3 8 мм.
159 П. А
1.5.33 Площадь (приложение 1, [142])
5 = 0,1134 мм 2 .
1.5.34 Уточненный коэффициент заполнения паза (9-35) [142],
S'm 0,041
1.5.35 Уточненная ширина шлица
Ь"шх =d' + 2Ьи + 0,4 = 0,42 + 2 • 0,2 + 0,4 = 1,22 мм.
Принимаем ЬШ1 = Ь'Ш1 = 2,4 мм.
1.5.36 Плотность тока в обмотке статора (9-39) [142],
, /, 1,09 2
J, = —— = = 9,67 А/мм . 1 cSax 1.0,041-1
1.5.37 Произведение Ai Ji
AXJX = 120 • 9,67 = 1168,53 А/(см-мм 2) .
1.5.38 Допустимое значение (рис. 9-8) [142],
AXJX =1750 А/(см-мм2).
1.5.39 Среднее зубцовое деление статора (9-40) [142],
n(Di+hm) = x(6S + 10,9)=l
CP1 z, 24
1.5.40 Средняя ширина катушки обмотки статора (9-41) [142],
ЪСР\ ~ {ср\Ут = 10,33 • 6 = 62 мм.
1.5.41 Средняя длина одной лобовой части катушки (19-2) [3],
1т = (1,16 + 0,14р)ЬСР1 +15 = 104,23 мм.
1.5.42 Средняя длина витка обмотки (19-4) [3],
1СП = 2(/, +1т) = 388,24 мм. (
1.5.43 Длина вылета лобовой части обмотки (9-45) [142],
1т = (0,12 + 0,15 р)ЬСР1 +10 = 34,1 мм.
1.6 Обмотка фазного ротора
1.6.1 Высота паза ротора (9-25) [142],
hn2 =14,15 мм.
160 П. А
1.6.2 Высота спинки ротора (9-24) [142],
hC2 =9,1 мм.
1.6.3 Магнитная индукция в спинке ротора (9-68) [142],
Ф-106
Вс2 = = 1,50Тл. ZKcl2nC2
1.6.4 Зубцовое деление по наружному диаметру ротора (9-69) [142],
тЮН1 я -108 , . ,„„ U = — — = = 11,78 мм.
18
1.6.5 Магнитная индукция в зубцах ротора (табл. 9-18) [142],
В32 = 1,80 Тл.
1.6.6 Ширина зубца (9-70) [142],
b Ми= П,78.0,81 32 B32kc 1,80-0,97
1.6.7 Большая ширина паза (9-26) [142],
_ п{РН2 - 2hI1I2 - hn2) - z2b32 __ '21
Z2-7l
7г(67,5-2>0,5-14)-18-5,78 = = 6,547 мм.
18-7E
1.6.8 Ширина и высота шлица паза ротора (9-27) [142],
Лд/2 = hm\ = 0,5мм,
ЬШг = ЬШ\ = 2,4лш.
1.6.9 Площадь поперечного сечения паза ротора в штампе (9-29) [142],
Sn2=(^^)Hhm-hUI2 - V^ffll) = 49,03 мм\
1.6.10 Площадь поперечного сечения паза ротора в свету (9-30) [142],
Sn2 = &уЩ + (hm - hW2 - hizkmi) -hc= 47,36 мм2.
1.6.11 Площадь поперечного сечения паза ротора занимаемая обмоткой
(9-33) [142],
ЯП2=(^^) + &т-кШ2-^^) = 35,45мм\
161 п
1.6.12 Произведение c(d')2 (9-36) [142],
c(d>f = М^ = 0>75-35,45 = 0 ; 3 5 м м 2 ?
Nn2 16
где к п — коэффициент заполнения паза.
1.6.13 Количество элементарных проводов в эффективном (§ 9-4) [142],
с = \.
1.6.14 Расчетный диаметр элементарного изолированного провода
* А 0,75-35,42 ,
Nmc V 76
1.6.15 Диаметры элементарного изолированного и неизолированного
провода
я?'= 0,51 мм; d = 0,47 мм.
1.6.16 Площадь поперечного сечения обмотки ротора
5 = 0,1745 мм 2 .
1.6.17 Уточненный коэффициент заполнения паза (9-35) [142],
_Nn2c(d')2 _76-Ь0,47 ;
0,79
1.6.18 Уточненная ширина шлица
Ьщ2 =d' + 2bu + °>4 = 2 > 3 8 м м -
Принимаем ЪШ2 — Ь'Ш2 =2,4 мм.
1.6.19 Среднее зубцовое деление ротора (9-40) [142],
= n(DH2 -hn2) = ,(68-14,15) м м
Ст2 z2 18
1.6.20 Средняя ширина катушки обмотки ротора (9-41) [142],
ЬСР2 =41,95 мм.
1.6.21 Средняя длина одной лобовой части катушки (9-42) [142],
1Л2 = (1,16 + 0,14р)ЬСР2 +15 = 75,34 мм.
1.6.22 Средняя длина витка обмотки ротора (9-43) [142],
1СР2 = 2(/, + 1Л2) = 330,80 мм.
162 П. А
1.6.23 Длина вылета лобовой части обмотки (9-45) [142],
/Я2 = (0,19 + 0,1 р)ЬСР2 +10 = 16,36 мм.
1.6.24 Линейная нагрузка ротора (9-21) [142],
A2=10Nn2-Z2 ^ = 1 0 - 7 6 - 1 8 — — — = 77,75 А/см. п • DH2 -а2 к • 67,5 • 1
1.6.25 Плотность тока в обмотке ротора (9-39) [142],
/ , = - ^ - = ^ = 6,90 А/мм2. cS2a2 1-0,1745-1
1.6.26 Произведение А2 h
A2J2 = 77,75 • 6,90 = 752,28 А/(см-мм 2 ) .
1.6.27 Допустимое значение (рис. 9-8) [142],
AXJX = 1200 А/(см-мм 2) .
1.7 Расчет магнитной цепи. МДС для воздушного зазора
1.7.1 Коэффициент, учитывающий увеличение сопротивления
воздушного зазора вследствие зубчатости строения статора (9-116) [142],
' h 2 4 k - 1 | иш\ - i . z i l - 1 ? i s Л и SS'ti on пл 5-0,25-8,9 _ 1 ' 2 1 5 '
Ч-ЪШ1+-—L 8 ,9-2,4 + >---i-
1.7.2 Коэффициент, учитывающий увеличение сопротивления
воздушного зазора вследствие зубчатости строения ротора (9-117) [142],
* - 1 + — ь - ш ^ ж = 1 > 1 5 3 -' 2 ^Я/2 т ,
1.7.3 Коэффициент, учитывающий уменьшение магнитного
сопротивления воздушного зазора при наличии радиальных каналов (9-118)
[142],
кк - 1 .
1.7.4 Общий коэффициент воздушного зазора (9-120) [142],
*•<? = ^SX^SI^K = 1>40.
163 П. А
1.7.5 МДС для воздушного зазора (9-121) [142],
Fs = 0,8 • 8 • k8Bs • 103 = 0,8 • 0,25 • 1,40 • 0,81 • 103 = 227 A.
1.8 МДС для зубцов статора
1.8.1 Напряженность магнитного поля (приложение 8, [142])
Нзх = 25 А/см.
1.8.2 Средняя длина пути магнитного потока (9-124) [142],
L3l = hm = 10,9 мм.
1.8.3 МДС для зубцов (9-125) [142],
F3l = 0,1 • H3lL3l = 0,1 • 25 • 10,9 = 27 А.
1.9 МДС для зубцов ротора
1.9.1 Напряженность магнитного поля (приложение 8, [142])
Нз2= 17,7 А/см.
1.9.2 Средняя длина пути магнитного потока (9-139) [142],
L32 = hn2 =14,15 мм.
1.9.3 МДС для зубцов (9-140) [142],
F32 = 0,1 • H32L32 = 24,94 А.
1.10 МДС для спинки статора
1.10.1 Напряженность магнитного поля (приложение 11, [142])
НС1 = 7,75 А/см.
1.10.2 Средняя длина пути магнитного потока (9-166) [142],
Lci = ^m-hcl) = 2 2 S 9 m A
4р
1.10.3 МДС для спинки статора (9-167) [142],
F C 1 =0,1-# C 1 -Z C 1 =17,74 А.
164 П. А
1.11 МДС для спинки ротора
1.11.1 Напряженность магнитного поля [142],
НС2 = 11,3 А/см.
1.11.2 Средняя длина пути магнитного потока (9-169) [142],
Z C 2 = ^ ^ ± ^ = 11,84 мм. Ар
1.11.3 МДС для спинки ротора (9-171) [ 142],
FC2
= 0,1/7 QI^CI = 13,383 А.
1.12 Параметры магнитной цепи
1.12.1 Суммарная МДС магнитной цепи на один полюс (9-171) [142],
/V = Fb + F3X + F32 + Fcl + FC2 = 310,06 A.
1.12.2 Коэффициент насыщения магнитной цепи (9-172) [142],
кнАс=ъ=ш*^36. НАС Fs 227
1.12.3 Намагничивающий ток (9-173) [142],
/ м = ^ р = 0 6 7 А тх0)хкОБХ
1.12.4 Намагничивающий ток в относительных единицах (9-174) [142],
/* . = ^ - = 0,607 о.е.
1.12.5 ЭДС холостого хода (9-175) [142],
E = kHUx=2\5fi В.
1.12.6 Главное индуктивное сопротивление (9-176) [142],
хм = — = 323 Ом.
1.12.7 Главное индуктивное сопротивление в относительных единицах (9-
177) [142],
х = ^MIL = 1614 о.е. м Ux
165 П. А
1.13 Активные и индуктивные сопротивления обмоток. Сопротивление
обмотки статора
1.13.1 Активное сопротивление обмотки фазы при 20 °С (9-178) [142],
гх= *-££!—- = 23,55 Ом.
1.13.2 То же, в относительных единицах (9-179) [142],
г „ = - ^ - = 0Д2о.е. С/,
1.13.3 Проверка правильности определения ги (9-180) [142],
_ TTDX(AXJX)ICPI TTDX(AXJX)ICPI
П4Л04-тхих1х
1.13.4 Размеры паза статора
Ъх = 7,48 мм, Ъшх = 2,4 мм, АШ1 = 0,5 мм, /zA1 = 1,0 мм,
/*2 = 0,6 лш , /гй1 = 10,9 л ш , /г4 = 0,4 мм, \ = 8,4 мм.
1.13.5 Коэффициент проводимости рассеяния (9-185) [142],
К = — £ B i + ( kJ— + — + — ) * В 1 =0,89. 3Z>2
P1 ^ 2 + 2 ^ , 6ш1 * / м
1.13.6 Коэффициент дифференциального рассеяния статора [142],
кД1 = 0,0285.
1.13.7 Коэффициент, учитывающий влияние открытия пазов статора на
проводимость дифференциального рассеяния (9-188) [142],)
^ , = 1 _ 2 ^ = 0,915.
1.13.8 Коэффициент, учитывающий демпфирующую реакцию токов,
наведенных в обмотке ротора высшими гармониками поля статора [142],
* р 1 =0,83 .
1.13.9 Коэффициент проводимости дифференциального рассеяния [142],
2 - в ' ^ т т \Я\крб\) крхкщхкдх _ о о? *\* ТТЛ ^™" ~ ~ ^*»jt#^* ш
Д1 8-к5
166 П. А
1.13.10 Полюсное деление (9-190) [142],
7rD. п -68 _- ., т = L = = 53,41 мм.
2р 4
1.13.11 Коэффициент проводимости рассеяния лобовых частей обмотки
(9-191) [142],
Кх= 0 , 3 4 ^ ( ^ - 0 , 6 4 / ^ ) = 0,53.
1.13.12 Коэффициент проводимости рассеяния обмотки статора [142],
A = ^ . + 4 H + 4 , I =4,38.
1.13.13 Индуктивное сопротивление обмотки фазы статора (9-193) [142],
х, = 1.51/; • 1Х • (й\ • Я, l(pqx • 108) = 11,95 Ом.
1.13.14 Индуктивное сопротивление обмотки фазы статора в
относительных единицах (9-194) [142],
JC„ =х1/1/С/1=0,07.
1.13.15 Проверка правильности определения хи (9-195) [142],
щцлуцЧл, -to-'= р. 07, mlUlI1z1
1.14 Сопротивление обмотки ротора с трапециидальными полузакрытыми
пазами
1.14.1 Активное сопротивление обмотки фазы ротора при 20 °С [142],
ял, •/„ '2 *2 Г = — от /• о 1 Л 3 = 229 -330,80/(57- 0,173 -103) = 7,66 Ом
(Р.20^'10 3 )
1.14.2 Коэффициент приведения обмотки ротора к обмотке статора [142],
£„,2=2,88.
1.14.3 Активное сопротивление обмотки фазы ротора, приведенное к
обмотке статора в (Ом)
г\ = кпр2 • г2 = 2,88 • 7,66 = 22,05 Ом
167 П. A
1.14.4 Активное сопротивление обмотки фазы ротора, приведенное к
обмотке статора в о.е.
r\* = r\ -IjL = 22,05 • i ^ = ОД 1 о.е. 2 2 U 220
1.14.5 Коэффициент проводимости паза ротора (9-206) [142],
Д я 2 = 1 Д 2 А 1 0 Ч ^ ± М ^ ( 1 _ £ ^ 1 ) 2 + о > 6 6 - ^ + 0;3 = 0;81.
1.14.6 Коэффициент дифференциального рассеяния ротора (рис. 9-17,
[142])
кд2 =0,055.
1.14.7 Коэффициент проводимости дифференциального рассеяния [142],
Лд2 = 0,9t2(z2/6p)2kd2/(S-ks) = 3,23.
1.14.8 Коэффициент проводимости рассеяния обмотки ротора (9-211)
Л2 = ЛП2 + ЛД2 + Лл2 = 0,81 + 3,23 + 0,24 = 4,28.
1.14.9 Индуктивное сопротивление обмотки ротора (9-212) [142],
l,58.^./2X4= м
? 2 . р -10 !
1.14.10 Индуктивное сопротивление обмотки ротора, приведенное к
обмотке статора (9-213) [142],
х 2 '=£„ р Г;с 2=2,88-5,318 = 15,30 Ом.
1.14.11 То же в относительных единицах (9-214) [142],
V = * 2 V C / , = 15,30-(1,09/220) = 0,076.
1.15 Расчет режима холостого хода
1.15.1 Реактивная составляющая тока статора при синхронном вращении
(9-257) [142],
hP. =Ul/[xm(l + Tl)(l + Л 2)] = 0,642 А.
1.15.2 Электрические потери в обмотке статора при синхронном
вращении (9-258) [142],
168 П. А
Р^ = **,/в>/(1 + А2) = 3 • 0,6422 • 32,49(1 + 0,132) = 40,61 Вт.
1.15.3 Расчетная масса стали зубцов статора при трапецеидальных пазах
(9-259) [142],
m3l = 7,SzlbzlhJlkc-\0-6 =0,75 кг.
1.15.4 Магнитные потери в зубцах статора (9-250) [142],
Psi=4AB2
3lcpm3l =10,10 Вт.
1.15.5 Масса стали спинки статора (9-261) [142],
тсХ = 7.8лг(ЯЯ1 - hcX)hcXlxkc • 10"6 = 1,94 кг.
1.15.6 Магнитные потери в спинке статора (9-254) [142],
Pci=*AB2
cXcpmcl =20,55 Вт.
1.15.7 Суммарные магнитные потери в сердечнике статора, включающие
добавочные потери в стали (9-262) [142],
Pcz = ̂ ,[1 + Ц^к* - ^ ] + Ра = 3 8 ' 3 0 В т '
1.15.8 Механические потери (9-265) [142],
Р„& = ^ ( «1/ Ю 0 0 )
2ф
Я 1/ 1 0 0 )
4 =6,12 Вт.
1.15.9 Активная составляющая тока х.х. (9-267) [142],
ha = {Рс. + Р* + РжЖщЪ) = (20,55 + 38,30 + 6,12)/(3 • 220) = 0,13 А.
1.15.10 Ток холостого хода (9-268) [142],
К = V 7 - + 7С.Р = л/ОДЗ2 + 0,642 = 0,66 А.
1.15.11 Коэффициент мощности при х.х.
0 0 8 ^ = 7 ^ / ^ = 0,13/0,66 = 0,20.
1.16 Расчет параметров номинального режима работы
1.16.1 Активное сопротивление КЗ (9-271) [142],
rk=rx'+r2" =65,91 Ом.
1.16.2 Индуктивное сопротивление КЗ (9-272) [142],
хк=х1
,+х2
п- 29,Ъ А Ом.
169 П
1.16.3 Полное сопротивление КЗ (9-273) [142],
zk = Jri + х\ = V65,912 + 29,342 = 72,15 Ом.
1.16.4 Добавочные потери при номинальной нагрузке (9-274) [142],
Рд = 0,005Р2 • 1031г?= 0,005 • 370/0,75 = 0,74 Вт.
1.16.5 Механическая мощность двигателя (9-275) [142],
Р2'= Р2 • 103 + Рш + Рд = 370 + 6,12 + 0,74 = 376,86 Вт.
1.16.6 Эквивалентное сопротивление схемы замещения (9-270а) [142],
R - Щи* " 2Р,' •гк+.
2Р ' •z\ =366,73,
1.16.7 Полное сопротивление схемы замещения (9-276) [142],
zH = J(RH +rK)2+ x2
k = -7(376,86 + 65,91)2 + 29,342 = 435,63 Ом.
1.16.8 Скольжение (9-278) [142],
1 'н l + RH/r2"
= 0,083.
1.16.9 Активная составляющая тока статора при синхронном вращении
(9-279) [142],
1С, = (PejA + ̂ ) W i ) = (40,62 + 38,30)/(3 • 220) = 0,12 А.
1.16.10 Ток ротора (9-280) [142],
I2"=UxlzH =220/435,63 = 0,51 А.
1.16.11 Ток статора
Активная составляющая (9-281) [142],
1*=1са+1г" V ZH
1 + А ZH1 + PI) = 0,62.
Реактивная составляющая (9-282) [142],
' , l = ' c . , + V хк 1-А2 R
H
+rk 2/7, Л
{zH\ + pl •н l + Pi = 0,63,
Фазный ток статора (9-283) [142],
h = V 7 i + 7Pi = "I0*62-2 + ° '632 = °>88 А '
170 П. А
1.16.12 Коэффициент мощности (9-284) [142],
cosg? = Ial IIX = 0,62/0,88 = 0,701.
1.16.13 Линейная нагрузка статора (9-285) [142],
Ах = ЮЩт 1{ах -tx) = 10 • 0,88 • 98/(1 • 8.9) = 96,92 А/см.
1.16.14 Плотность тока в обмотке статора (9-39) [142],
. /, 0,88 J, = —— = = 7,76 А/мм
1 cSax 1-0,113-1 1.16.15 Линейная нагрузка ротора (9-286) [142],
2
А2 = Ах12"(1 + тх)^1 + р2кобх HhKeiKk) = 58,02 А/см.
1.16.16 Ток фазного ротора
1р=12^хкобх{\ + тх)^й^ 1{со2кск) = 0,5Ъ А.
1.16.17 Плотность тока в обмотке фазного ротора
Jcm = I2 l{S2 -c2-a2) = 0,53/(0,173 • 1 • 1) = 3,04 А/мм2.
1.16.18 Произведение плотности тока и линейной нагрузки
A2-J2= 58,02 • 3,04 = 176,24.
1.16.19 Электрические потери в обмотке статора (9-294) [142],
Рт1 =w,/JV=3-l,10 2 -23,55 = 88,02 Вт.
1.16.20 Электрические потери в обмотке ротора (9-295) [142],
Рт2 =ml-I2
2-r2=3- 0,532 - 7,66 = 6,38 Вт.
1.16.21 Суммарные потери в электродвигателе (9-296) [142],
"z. = "MI
+ "мг + "cz + "мх + "д =
= 85,02 + 6,38 + 38,30 + 6,12 + 0,74 = 136,56 Вт.
1.16.22 Подводимая мощность (9-297) [142],
Рх =Р2 -103 + PZ =370 + 136,56 = 506,56 Вт.
1.16.23 Коэффициент полезного действия (9-298) [142],
т; = (1 - 5^)100 = (1 - ™ £ 1 ) . 100 = 73,04 %. Рх
v 506,56
171 П
Проверка:
Р2 = mJJJ. -^-cos<p = 3 • 1,09 • 220 • — • 0,70 = 370,68Вт (« 370 Вт). * 100 100
1.17 Максимальный момент
1.17.1 Переменная часть коэффициента статора (9-305) [142],
КХПЕР = (ЗЛ„ КЬ2 +Ьш1) + Аж1 / 6 ш 1 ) у = 0,38.
1.17.2 Составляющая коэффициента проводимости рассеяния статора
[142],
^ЛПЕР ~ ^ПХПЕР "*" ̂ д\ ~ 2 5 о 0 .
1.17.3 Переменная часть коэффициента ротора (9-310) [142],
ЛП2ЛЕР=1,Ш2-Ю3/12=0,65.
1.17.4 Составляющая коэффициента проводимости рассеяния ротора
[142],
^2ПЕР = ^пгпЕР + ^Д2 = 0'65 + 3,23 = 3,88.
1.17.5 Индуктивное сопротивление рассеяния двигателя, зависящее от
насыщения (9-315) [142],
хтР
= Х\КПЕР /Л + хг^гпЕР I К- 22,71 Ом.
1.17.6 То же, не зависящее от насыщения (9-316) [142],
X
nocm=XA\-\nEp)l;k+X2X*>2-kinEp),^1=b,te ОМ.
1.17.7 Ток ротора, соответствующий максимальному моменту (9-322)
[142],
I " = №? + ( * _ + 0,25х„е/?)
2 + г[{хпост + 0,25х„ер)]
= 4,60 А. l ,24.10 3^[r/ 2 + 2{xnocm + 0,25хпер)]хпер
2Nm[r» + (хпост + 0,25хлер)2 + г/(хлос,„ + 0,25x„J]
1.17.8 Полное сопротивление схемы замещения при максимальном
моменте (9-323) [142],
ZM =UXIIM2"= 220/4,60 = 47,78 Ом.
172 П. А
1.17.9 Полное сопротивление схемы замещения при бесконечно большом
скольжении (9-324) [142],
Zm = K+2zM _!f_ = 7 4 97 Ом. 00 V 2 2
1.17.10 Эквивалентное сопротивление схемы замещения при
максимальном моменте (9-325) [142],
RM=zm+ гх '= 74,97 + 32,49 = 107,47 Ом.
1.17.11 Кратность максимального момента (9-326) [142],
Мтях = 111,̂ (1-4) = 3-220 2q-0,083)= 1 ?
Мн 2RMP2-103 2-107,47-370
1.17.12 Скольжение при максимальном моменте (9-327) [142],
*м =г2
п/г. =33,42/74,97 = 0,45.
1.18 Тепловой расчет
1.18.1 Потери в обмотке статора при максимально допускаемой
температуре (9-378) [142],
РМ1
х=тх1х
2тт'гх^ЪЛЛ2-1,4-32,49 = 105,80 Вт.
1.18.2 Условная внутренняя поверхность охлаждения активной части
статора (9-379) [142],
5 Я 1 =лО 1 / 1 =3.14-68-90 = 1,923-104 мм2.
1.18.3 Условный периметр поперечного сечения трапецеидального
полузакрытого паза (9-380) [142],
Я, = 2hnl + bx + b2 = 34,478 мм.
1.18.4 Условная поверхность охлаждения пазов (9-382) [142],
£„„1=г 1Я 1/ 1=24-34.5-90 = 7,396-Ю4 мм.
1.18.5 Условная поверхность охлаждения лобовых частей обмотки [142],
5 л 1 = 4яО,/В1 = 7,691 • 104 мм.
1.18.6 Условная поверхность охлаждения двигателя
S =5,37-104 мм.
173 П. А
1.18.7 Удельный тепловой поток от потерь в активной части обмотки и от
потерь в стали, отнесенных к внутренней поверхности охлаждения активной
части ротора (9-386) [142],
рт = k{Pm*UxllcpX +Pcz)/Snl = 8,63-Ю-4 Вт/мм2.
1.18.8 То же, от потерь в активной части обмотки, отнесенных к
поверхности охлаждения пазов (9-387) [142],
Рим = CV2/,/lcpl)/SUMl = 6,63-Ю-4 Вт/мм2.
1.18.9 То же, от потерь в лобовых частях обмотки, отнесенных к
поверхности охлаждения лобовых частей обмотки (9-388) [142],
Рим = (^i'2/, / /* ,) /£,! = 7,36 • Ю-4 Вт/мм2.
1.18.10 Окружная скорость ротора (9-389) [142],
и2= я-£>Я2л,/60000 = 3,14- 67,5 -1500/60000 = 5,30 м/с.
1.18.11 Превышение температуры внутренней поверхности активной
части статора над температурой
воздуха внутри машины (9-390) [142],
где а! - коэффициент теплоотдачи.
1.18.12 Перепад температуры в изоляции паза и катушек (9-391) [142],
А/ы и 1=4,81 0С.
1.18.13 Превышение температуры наружной поверхности лобовых частей
обмотки над температурой воздуха внутри двигателя (9-393) [142],
^^л.Ц^^-ю-'лг-ю-^б,! °с. 1.18.14 Перепад температуры в изоляции лобовых частей катушек [142],
А/„.л1 =Р л 1[^ 1/Я э г а+/ г„ 1/12Я' э к в] = 5,35 °С.
174 П. А
1.18.15 Среднее превышение температуры обмотки над температурой
внутри двигателя (9-396) [142],
At,' = (Д*я1 + AtuM)f- + (Д*л1 + AtuM)^ = lcp\ 1ср\
= (7,19 + 4 , 8 1 ) - ^ ^ - + (6,10 + 5 , 3 5 ) 2 ' 1 0 4 Д 2 = 11,7°С.1 388,24 388,24
1.18.16 Потери в двигателе, передаваемые по воздуху внутри двигателя
(9-398) [142],
1ср\ 1ср\ t
1.18.17 Среднее превышение температуры воздуха внутри двигателя над
температурой наружного воздуха (9-399) [142],
&в = P^l{SMaapaB) = 17,1/(5,37 • 104 • 2,1 • 10~5) = 15,14 °С.
1.18.18 Среднее превышение температуры обмотки над температурой
наружного воздуха (9-400) [142],
Д*! = At, '+AtB = 11,73 +15,14 = 26,9 °С.
1.19 Масса двигателя и динамический момент инерции ротора
1.19.1 Масса изолированных проводов обмотки статора (9-416) [142],
тш = [7,55 + l,35(d'/d)2] • zx ^ Ч р 1 • с • s • Ю-6 = 1,430 кг.
1.19.2 Масса провода ротора (9-418) [142],
тПР2 =%,9z2S2lcp2Wn2\Q-6=b,35\ кг.
1.19.3 Масса стали сердечников статора и ротора (9-420) [142],
ж/2
тсЪ = 7.Ще 0.785(Z& -D 2
2)-z xS n X -z2Sn2 --^-nk2
1.19.4 Масса изоляции статора (9-421) [142],
10~6 =4,5 кг.
юи1 =1,35(/, +20)(2йв1 + 3bn)bulzx Л0~ь = 0,029 кг
175 П
1.19.5 Масса конструкционных материалов двигателя (9-425) [142],
тк = [(0,55-*-0,75)££,/, + (2,3-*-3,1)££,]10^ =3,8 кг.
1.19.6 Масса двигателя (9-433) [142],
та. = тт + тпР2 + тсъ + тИ1+тК =10,1 кг.
1.19.7 Динамический момент инерции ротора (9-415) [142],
• / ^ = ( 0
?
5 5 - 0 » 6 5 ) ^ 2 / 2 - 1 0 _ 1 2 = 0»6'67,54-90-10~12 = 1Д21-10-3^ м.
1.20 Итоговые параметры двигателя для комплексного стенда
КОД: 73,04 %;
Полезная мощность на валу, Рг: 0,368 кВт;
Коэффициент мощности, cosq>: 0,701;
Номинальный момент, М2: 2,34 Нм;
Ммах/Мн: 1,7;
Номинальный ток фазы статора/ротора, Ii/I2: 1,097/0,527 А;
Механические потери Рмех: 6,122 Вт;
Активное сопротивление статора, Т\\ 23,55 Ом;
Активное сопротивление ротора, г2: 7,66 Ом.
ПРИЛОЖЕНИЕ Б
ТЕХНИЧЕСКИЕ ХАРАКТЕРИСТИКИ ЭЛЕКТРОМАШИННОГО
АГРЕГАТА ЭА-3 ЭКСПЕРИМЕНТАЛЬНОЙ УСТАНОВКИ
«Модель электрической системы»
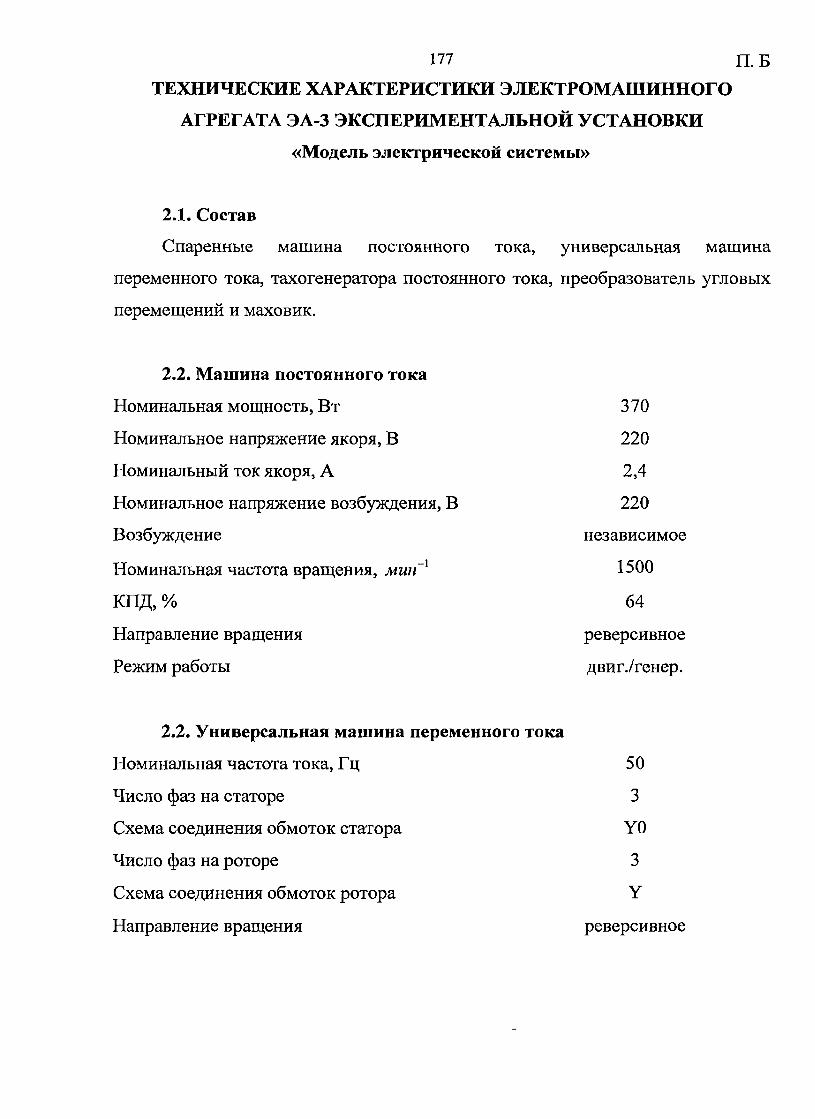
177 П. Б
ТЕХНИЧЕСКИЕ ХАРАКТЕРИСТИКИ ЭЛЕКТРОМАШИННОГО
АГРЕГАТА ЭА-3 ЭКСПЕРИМЕНТАЛЬНОЙ УСТАНОВКИ
«Модель электрической системы»
2.1. Состав
Спаренные машина постоянного тока, универсальная машина
переменного тока, тахогенератора постоянного тока, преобразователь угловых
перемещений и маховик.
2.2. Машина постоянного тока
Номинальная мощность, Вт
Номинальное напряжение якоря, В
Номинальный ток якоря, А
Номинальное напряжение возбуждения, В
Возбуждение
Номинальная частота вращения, мииГ1
КПД, %
Направление вращения
Режим работы
370
220
2,4
220
независимое
1500
64
реверсивное
двиг./генер.
2.2. Универсальная машина переменного тока
Номинальная частота тока, Гц
Число фаз на статоре
Схема соединения обмоток статора
Число фаз на роторе
Схема соединения обмоток ротора
Направление вращения
50
3
Y0
3
Y
реверсивное
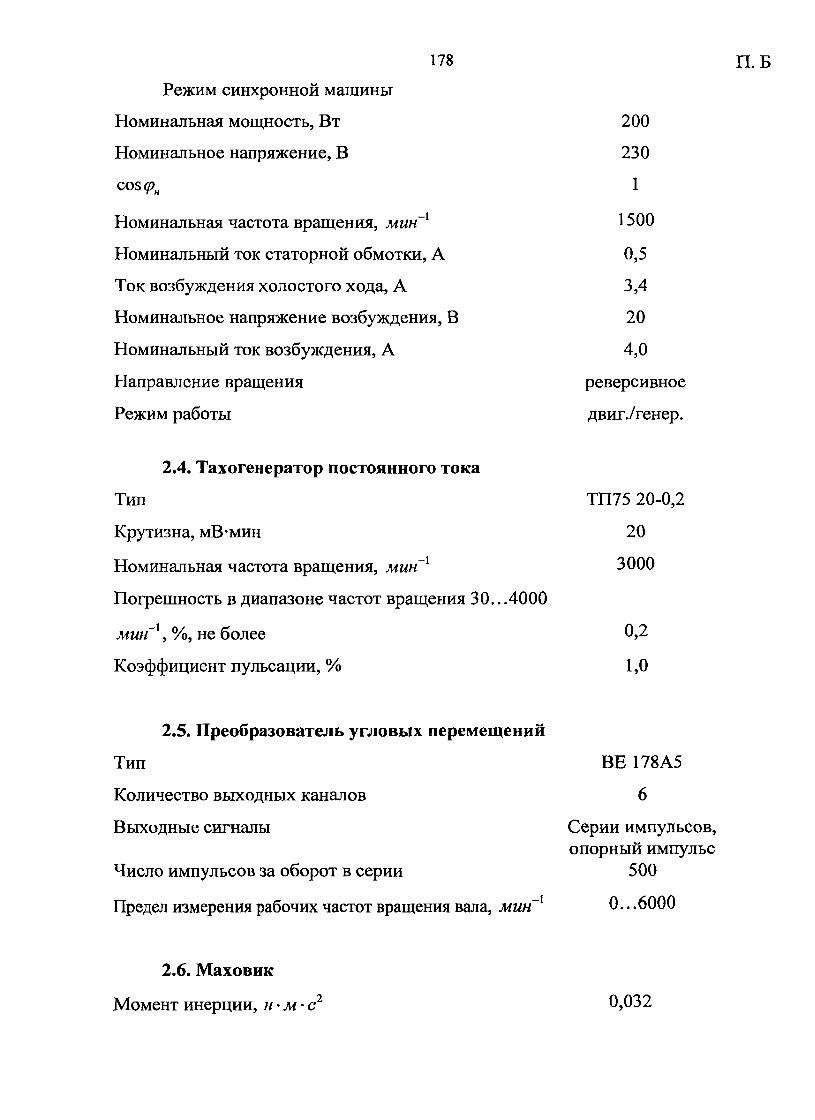
178
Режим синхронной машины
Номинальная мощность, Вт
Номинальное напряжение, В
cos«p„
Номинальная частота вращения, мин~х
Номинальный ток статорной обмотки, А
Ток возбуждения холостого хода, А
Номинальное напряжение возбуждения, В
Номинальный ток возбуждения, А
Направление вращения
Режим работы
П. Б
200
230
1
1500
0,5
3,4
20
4,0
реверсивное
двиг./генер.
2.4. Тахогенератор постоянного тока
Тип
Крутизна, мВ-мин
Номинальная частота вращения, мин~х
Погрешность в диапазоне частот вращения 30.. .4000
мин"1, %, не более
Коэффициент пульсации, %
ТП75 20-0,2
20
3000
0,2
1,0
2.5. Преобразователь угловых перемещений
Тип
Количество выходных каналов
Выходные сигналы
Число импульсов за оборот в серии
Предел измерения рабочих частот вращения вала, мин -1
BE 178А5
6
Серии импульсов, опорный импульс
500
0...6000
2.6. Маховик
Момент инерции, н-м-с2 0,032
ПРИЛОЖЕНИЕ В
ТЕХНИЧЕСКИЕ ДАННЫЕ
СИСТЕМЫ ВВОДА АНАЛОГОВЫХ ДАННЫХ В КОМПЬЮТЕР
HANDYPROBE И ИЗМЕРИТЕЛЬ RLC Е7-22
180 П. В
ТЕХНИЧЕСКИЕ ДАННЫЕ
СИСТЕМЫ ВВОДА АНАЛОГОВЫХ ДАННЫХ В КОМПЬЮТЕР
HANDYPROBE И ИЗМЕРИТЕЛЬ RLC Е7-22
П.В.1. Технические данные Handyprobe
При работе в режиме АЦП:
о Максимальная частота выборок 20 МГц;
о Входное напряжение 5 В (разрешение ±2,4 мВ);
о Входное напряжение 10В (разрешение ±4,8 мВ);
о Максимальное входное напряжение 500 В, 50 Гц;
о Разрешение 10 бит;
о Число каналов 2;
о Точность измерения напряжения в конечной точке шкалы 1%±МР.
При работе в режиме спектроанализатора:
о Частота выборок сигнала 250 Гц;
о Число выборок на канал 512;
о Число каналов 2.
П.В.2. Технические данные измерителя RLC Е7-22
Измеритель RLC Е7-22 предназначен для автоматического измерения
емкости, индуктивности и сопротивления на разных частотах. Базовая
погрешность измерения составляет 0,7 %. Результат измерения представлен в
виде четырехразрядного числа при измерении индуктивности (L), емкости
(С) и сопротивления (R), и дополнительного числа при измерении тангенса
угла диэлектрических потерь (D), добротности (Q) и сопротивления (R).
Измеритель RLC Е7-22 имеет интерфейс RS-232 для связи с ПК с оптической
развязкой.
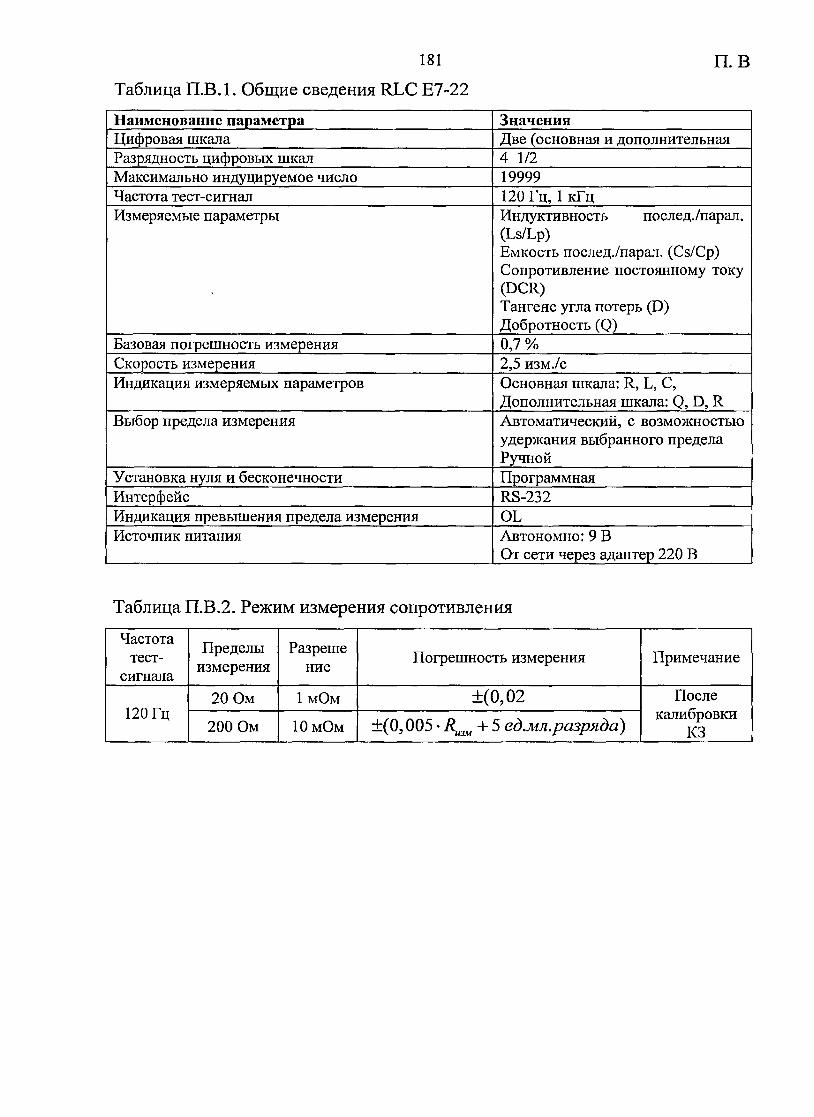
181 П.В
Таблица П.ВЛ. Общие сведения RLC Е7-22
Наименование параметра Цифровая шкала Разрядность цифровых шкал Максимально индуцируемое число Частота тест-сигнал Измеряемые параметры
Базовая погрешность измерения Скорость измерения Индикация измеряемых параметров
Выбор предела измерения
Установка нуля и бесконечности Интерфейс Индикация превышения предела измерения Источник питания
Значения Две(основная и дополнительная 4 1/2 19999 120 Гц, 1 кГц Индуктивность послед./парал. (Ls/Lp) Емкость послед./парал. (Cs/Cp) Сопротивление постоянному току (DCR) Тангенс угла потерь (D) Добротность(Q) 0,7 % 2,5 изм./с Основная шкала: R, L, С, Дополнительная шкала: Q, D, R Автоматический, с возможностью удержания выбранного предела Ручной Программная RS-232 OL Автономно: 9 В От сети через адаптер 220 В
Таблица П.В.2. Режим измерения сопротивления
Частота тест-
сигнала
120 Гц
Пределы измерения
20 Ом
200 Ом
Разреше ние
1 мОм
ЮмОм
Погрешность измерения
±(0,02
±(0,005 • RU3M + 5 ед.мл.разряда)
Примечание
После калибровки
КЗ
ПРИЛОЖЕНИЕ Г
РАСЧЕТ ПОГРЕШНОСТИ ИЗМЕРЕНИЯ ДЛЯ
ЦИФРОВОГО ИЗМЕРИТЕЛЯ Е7-22
183 П.Г
РАСЧЕТ ПОГРЕШНОСТИ ИЗМЕРЕНИЯ ДЛЯ
ЦИФРОВОГО ИЗМЕРИТЕЛЯ Е7-22
Расчет погрешности измерения активного сопротивления
На пределе 200 Ом разрешение 10 мОм, значит 5 ед.мл. разряда равно
0,05 Ом (приложение В).
Определяем абсолютную погрешность для обмотки возбуждения
Да,с = ± ( 0 , 0 0 5 * ^ + 0 , 0 5 0**) =
= ±(0,005 * 3,7 Ом + 0,05 Ом) = ±0,0685 Ом.
Определяем относительную погрешность для обмотки возбуждения
мб^ш 8 5 1 %
3,7 Ом
Абсолютная и относительная погрешность сопротивления обмотки
возбуждения будет равна для всех обмоток.
Расчет погрешности измерения индуктивного сопротивления
На пределе 2000 Гн разрешение 100 мГн, значит 5 ед.мл. разряда равно
0,05 Ом (приложение В).
Определяем абсолютную погрешность
Аабс = ± ( 0 , 0 1 * ^ + 4 / 1 0 0 0 0 + 0,05) =
= ±(0,01*136,1 + 1361/10000+ 0,05) =+1,547 л*Гк.
Определяем относительную погрешность
д _ = М £ 1 ^ ! 00% = 1,137%. 136,1 мГн отс
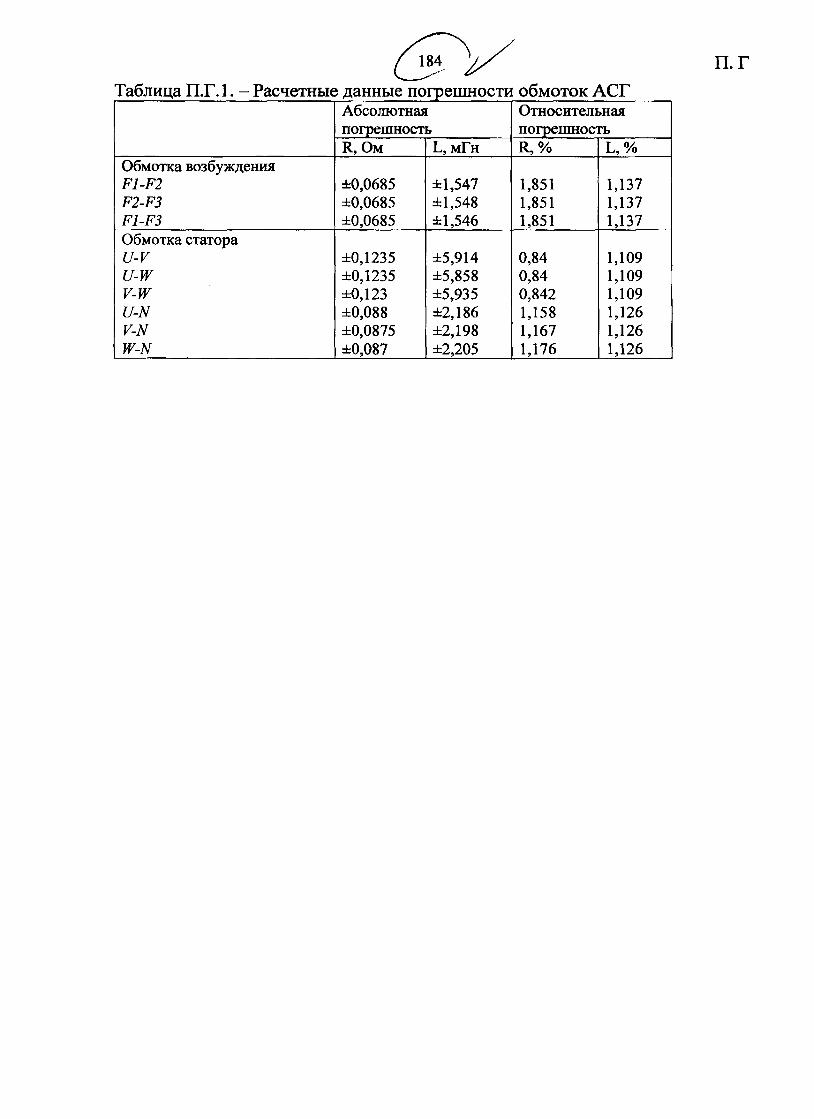
Таблица П.Г.1. - Расчетные данные погрешности обмоток АСГ
Обмотка возбуждения F1-F2 F2-F3 F1-F3 Обмотка статора U-V U-W V-W U-N V-N W-N
Абсолютная погрешность R , O M
±0,0685 ±0,0685 ±0,0685
±0,1235 ±0,1235 ±0,123 ±0,088 ±0,0875 ±0,087
L, мГн
±1,547 ±1,548 ±1,546
±5,914 ±5,858 ±5,935 ±2,186 ±2,198 ±2,205
Относительная погрешность R,%
1,851 1,851 1,851
0,84 0,84 0,842 1,158 1,167 1,176
L,%
1,137 1,137 1,137
1,109 1,109 1,109 1,126 1,126 1,126





























