Embed Size (px)
Citation preview
Université d’Évry-Val d’Essonne CS71 - notes de cours, septembre 2009
CHAPITRE 1 : RAPPELS D’ÉLASTICITÉ LINÉAIRE
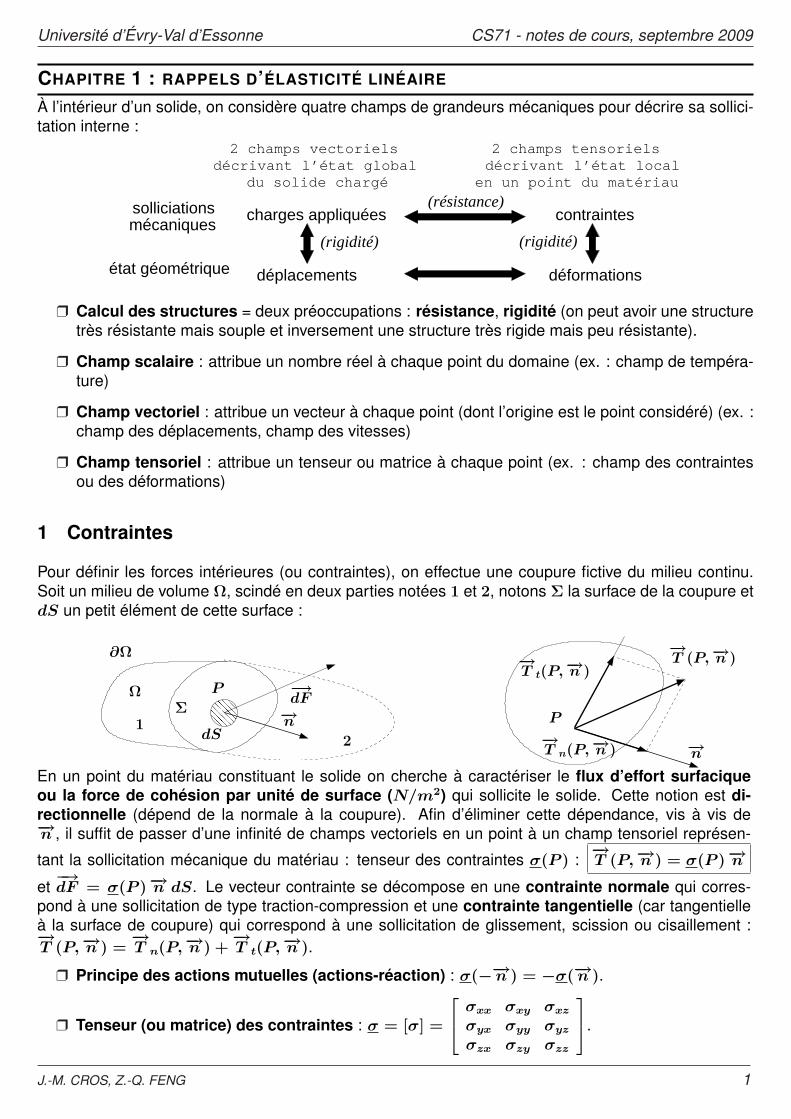
À l’intérieur d’un solide, on considère quatre champs de grandeurs mécaniques pour décrire sa sollici-tation interne :
(rigidité)(rigidité)
décrivant l’état globaldu solide chargé
décrivant l’état local2 champs tensoriels
en un point du matériau
solliciationsmécaniques
état géométrique déplacements
charges appliquées contraintes
déformations
(résistance)
2 champs vectoriels
r Calcul des structures = deux préoccupations : résistance, rigidité (on peut avoir une structuretrès résistante mais souple et inversement une structure très rigide mais peu résistante).
r Champ scalaire : attribue un nombre réel à chaque point du domaine (ex. : champ de tempéra-ture)
r Champ vectoriel : attribue un vecteur à chaque point (dont l’origine est le point considéré) (ex. :champ des déplacements, champ des vitesses)
r Champ tensoriel : attribue un tenseur ou matrice à chaque point (ex. : champ des contraintesou des déformations)
1 Contraintes
Pour définir les forces intérieures (ou contraintes), on effectue une coupure fictive du milieu continu.Soit un milieu de volume Ω, scindé en deux parties notées 1 et 2, notons Σ la surface de la coupure etdS un petit élément de cette surface :
−→n
P
dS
Σ
∂Ω
21
Ω −→dF
−→T (P, −→n )
−→n
P
−→T t(P, −→n )
−→T n(P, −→n )
En un point du matériau constituant le solide on cherche à caractériser le flux d’effort surfaciqueou la force de cohésion par unité de surface (N/m2) qui sollicite le solide. Cette notion est di-rectionnelle (dépend de la normale à la coupure). Afin d’éliminer cette dépendance, vis à vis de−→n , il suffit de passer d’une infinité de champs vectoriels en un point à un champ tensoriel représen-
tant la sollicitation mécanique du matériau : tenseur des contraintes σ(P ) :−→T (P, −→n ) = σ(P ) −→n
et−→dF = σ(P ) −→n dS. Le vecteur contrainte se décompose en une contrainte normale qui corres-
pond à une sollicitation de type traction-compression et une contrainte tangentielle (car tangentielleà la surface de coupure) qui correspond à une sollicitation de glissement, scission ou cisaillement :−→T (P, −→n ) =
−→T n(P, −→n ) +
−→T t(P, −→n ).
r Principe des actions mutuelles (actions-réaction) : σ(−−→n ) = −σ(−→n ).
r Tenseur (ou matrice) des contraintes : σ = [σ] =
σxx σxy σxz
σyx σyy σyz
σzx σzy σzz
.
J.-M. CROS, Z.-Q. FENG 1

Université d’Évry-Val d’Essonne CS71 - notes de cours, septembre 2009
r Symétrie du tenseur des contraintes : réciprocité des contraintes tangentielles (σij = σji; i, j =x, y, z, on le démontre en écrivant l’équilibre en rotation).
r Sous forme vectorielle (6 composantes) : < σ >=< σxx σyy σzz σxy σxz σyz >
r Contraintes principales : il existe un repère principal, noté (X1, X2, X3), dans lequel la matricedu tenseur des contraintes est diagonale :
[σ] =
σ1 0 00 σ2
0 0 σ3
X1,X2,X3
Les contraintes σ1, σ2 et σ3 sont appelées contraintes normales principales. Ce sont les valeurspropres du tenseur des contraintes σ au point P . Convention : σ1 ≥ σ2 ≥ σ3.
r Invariants du tenseur des contraintes :
• Invariant linéaire : I1 = trace(σ) = σkk = σxx + σyy + σzz = σ1 + σ2 + σ3.
• Invariant quadratique : I2 =1
2
[(trace(σ))2 − trace(σ2)
]= σ1σ2 + σ2σ3 + σ3σ1
= σxxσyy + σyyσzz + σzzσxx − σ2xy − σ2
yz − σ2zx.
• Invariant cubique : I3 = det(σ) = σ1σ2σ3
= σxxσyyσzz + 2σxyσyzσzx − σzzσ2xy − σxxσ2
yz − σyyσ2zx.
r Décomposition du tenseur des contraintes : σs (sphérique) + σd (déviateur) : σ = σs + σd
• tenseur sphérique : σsij = σh δij avec σh contrainte hydrostatique et δij = 1 si i = j et
δij = 0 si i 6= j (symbole de Kronecker). Ou encore σsij =
1
3σkk δij =
1
3trace(σ) δij.
• tenseur déviateur :σd = σ − 1
3trace(σ) I ⇒ σd
ij = σij − σsij ou [σd] = [σ] − σh[I] avec trace([σd]) = 0.
r Invariants du déviateur des contraintes : P (λd) = det([σd] − λd[I]) = 0où P (λd) = −λ3
d + J2λd + J3 = 0
• J1 = trace([σd]) = 0.
• J2 =1
6
[(σ1 − σ2)
2 + (σ2 − σ3)2 + (σ3 − σ1)
2]
=1
6
[(σxx − σyy)
2 + (σyy − σzz)2 + (σzz − σxx)
2 + 6(σ2
xy + σ2yz + σ2
zx
)].
• J3 = det([σd]) = det([σ] − σh[I]).
r Contrainte équivalente au sens de Tresca : τtr = maxi,j
|σi − σj| .
r Contrainte équivalente au sens de von Mises : σeq =√
3 J2 .
2 Déformations
On se place dans le cadre de l’hypothèse des petits déplacements. Les déplacements restentpetits vis à vis de la taille du solide étudié et donc les déformations seront également petites (on parlealors d’hypothèse des petites pertubations d’où l’abréviation de HPP). La géométrie globale deréférence de la structure restera la géométrie initiale non chargée.
J.-M. CROS, Z.-Q. FENG 2
Université d’Évry-Val d’Essonne CS71 - notes de cours, septembre 2009
r La rigidité du système provient d’une part du matériau et d’autre part de la géométrie du prob-lème (solide et chargement). Ainsi, dans le cadre de l’hypothèse des petits déplacementset en supposant un comportement linéaire pour le matériau (déformations proportionnelles auxcontraintes), la rigidité reste constante.
r Attention : l’hypothèse des petites déformations n’implique par forcément des petits déplace-ments. En effet, on peut avoir des grands déplacements et des petites déformations : le matériaureste linéaire dans son comportement mais le problème devient non-linéaire par sa géométrieglobale.
r Tenseur (ou matrice) linéarisé des déformations :
ε =1
2(grad
−→U + (grad
−→U )T ) ⇒ εij =
1
2(∂ui
∂xj
+∂uj
∂xi
) ⇒ [ε] =
εxx εxy εxz
εyx εyy εyz
εzx εzy εzz
.
Si−→U =
ux
uy
uz
alors εxx = ux,x; εyy = uy,y; εzz = uz,z
et εxy =1
2(ux,y + uy,x); εxz =
1
2(ux,z + uz,x); εyz =
1
2(uy,z + uz,y).
r Sous forme vectorielle (6 composantes) : < ε >=< εxx εyy εzz 2 εxy 2 εyz 2 εzx >,ou < ε >=< εxx εyy εzz γxy γyz γzx > avec les cisaillements γij tels que γij = 2 εij.
3 Matériau
r Homogénéité : les propriétés mécaniques intrinsèques au matériau constituant le solide étudiésont indépendantes du point P que l’on considère.
r Isotropie : les propriétés mécaniques intrinsèques au matériau en un point P sont indépen-dantes de la direction selon laquelle on les observe.
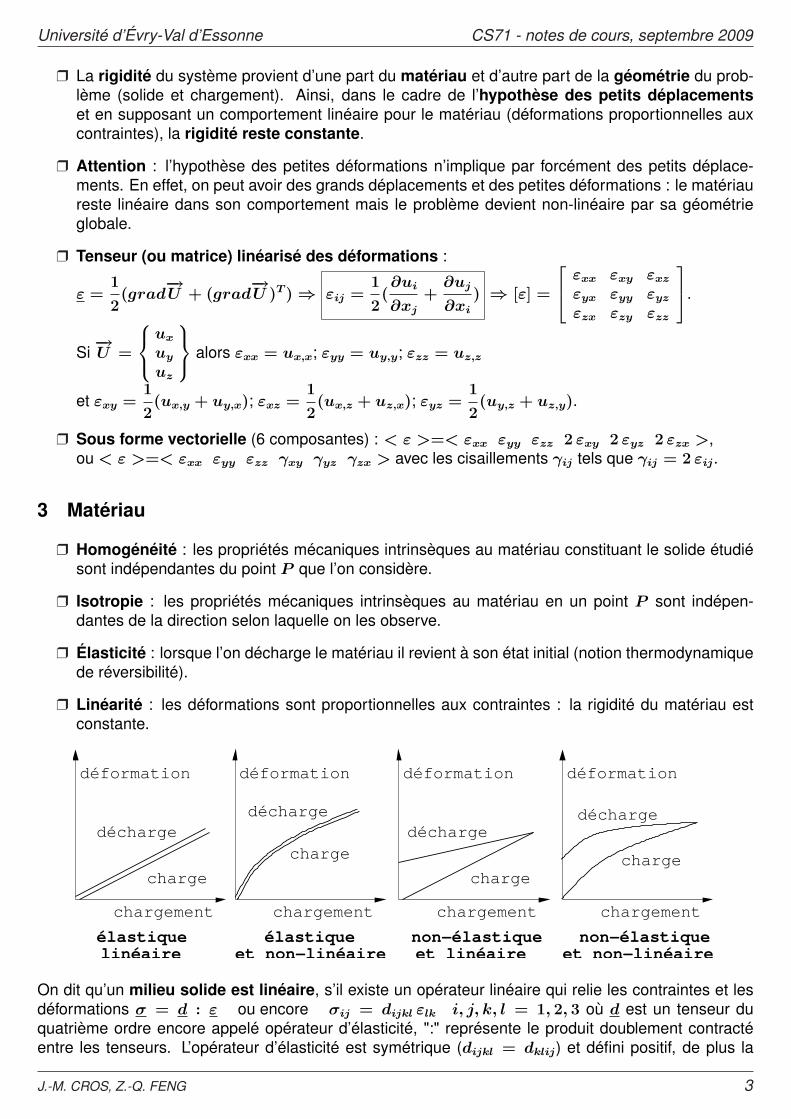
r Élasticité : lorsque l’on décharge le matériau il revient à son état initial (notion thermodynamiquede réversibilité).
r Linéarité : les déformations sont proportionnelles aux contraintes : la rigidité du matériau estconstante.
élastique
déformation
chargement
charge
décharge
linéaireélastique
et non−linéaire
déformation
chargement
décharge
charge
déformation
chargement
charge
décharge
non−élastiqueet linéaire
déformation
chargement
décharge
charge
non−élastiqueet non−linéaire
On dit qu’un milieu solide est linéaire, s’il existe un opérateur linéaire qui relie les contraintes et lesdéformations σ = d : ε ou encore σij = dijkl εlk i, j, k, l = 1, 2, 3 où d est un tenseur duquatrième ordre encore appelé opérateur d’élasticité, ":" représente le produit doublement contractéentre les tenseurs. L’opérateur d’élasticité est symétrique (dijkl = dklij) et défini positif, de plus la
J.-M. CROS, Z.-Q. FENG 3

Université d’Évry-Val d’Essonne CS71 - notes de cours, septembre 2009
symétrie des tenseurs des contraintes et des déformations (dijkl = djikl et dijkl = djilk) permet deréduire le nombre des coefficients d’élasticité (on passe de 34 = 81 à 21 coefficients). En utilisant,la notation vectorielle, la loi d’élasticité s’écrit σ = [D] ε où [D] est la matrice d’élasticité quidépend du matériau.
3.1 Matériau anisotrope
Le matériau est dit anisotrope si ses propriétés varient en fonction du point P dans Ω. Dans ce cas lamatrice d’élasticité possède 21 coefficients indépendants.
3.2 Matériau orthotrope
Le matériau est dit orthotrope s’il possède deux plans de symétrie perpendiculaires. Dans ce cas, lamatrice d’élasticité (écrire l’invariance des coefficients d’élasticité par rapport à ces plans) ne possèdeque 9 coefficients indépendants et s’écrit :
[D] =
d11 d12 d13 0 0 0d12 d22 d23 0 0 0d13 d23 d33 0 0 00 0 0 d44 0 00 0 0 0 d55 00 0 0 0 0 d66
3.3 Matériau isotrope
Un matériau est dit isotrope si ses propriétés sont identiques dans les trois directions de l’espace. Dansce cas, par rapport au matériau orthotrope et en introduisant les coefficients de Lamé, il ne reste quedeux coefficients indépendants :
[D] =
λ + 2µ λ λ 0 0 0λ λ + 2µ λ 0 0 0λ λ λ + 2µ 0 0 00 0 0 µ 0 00 0 0 0 µ 00 0 0 0 0 µ
Cette loi de comportement, dite loi de Hooke, peut se formuler comme suit :
σ = λ trace(ε) I + 2µ ε ou encore σij = λ εkkδij + 2µ εij
En inversant la loi de comportement, ce qui est possible car la loi d’élasticité est définie positive, onobtient les relations entre déformations et contraintes (loi de souplesse) :
ε =1
2µσ − λ trace(σ)
2µ(3λ + 2µ)I ou encore εij =
1
2µσij − λ σkk
2µ(3λ + 2µ)δij
qui s’écrivent également en fonction du module de Young (E) et du coefficient de Poisson (ν) :
ε =1 + ν
Eσ − ν
Etrace(σ) I ou encore εij =
1 + ν
Eσij − ν
Eσkk δij
D’où les relations entre les couples de coefficients (λ, µ) et (E, ν) :
E = µ(3λ + 2µ)
λ + µ, ν =
λ
2 (λ + µ), λ =
νE
(1 − 2ν)(1 + ν), µ =
E
2 (1 + ν).
J.-M. CROS, Z.-Q. FENG 4
Université d’Évry-Val d’Essonne CS71 - notes de cours, septembre 2009
On peut alors établir la loi d’élasticité en fonction du module de Young et du coefficient de Poisson :
σ =νE
(1 − 2ν)(1 + ν)trace(ε) I +
E
(1 + ν)ε.
Comme l’opérateur d’élasticité est défini positif cela entraîne des conditions sur les coefficients :
3λ + 2µ > 0, µ > 0, E > 0, −1 < ν <1
2.
On introduit aussi l’inverse de l’opérateur d’élasticité (opérateur de flexibilité) soit c = d−1 que l’on peutaussi écrire sous forme matricielle C = D−1, alors ε = C σ. Finalement, on a :
[D] =E(1 − ν)
(1 + ν)(1 − 2ν)
1 b b 0 0 0b 1 b 0 0 0b b 1 0 0 00 0 0 c 0 00 0 0 0 c 00 0 0 0 0 c
, [C] =1
E
1 −ν −ν 0 0 0−ν 1 −ν 0 0 0−ν −ν 1 0 0 00 0 0 d 0 00 0 0 0 d 00 0 0 0 0 d
avec b =ν
1 − ν; c =
1 − 2ν
2(1 − ν); d = 2(1 + ν) .
3.4 Interprétations des coefficients d’élasticité
3.4.1 État de contraintes et de déformations sphériques
On a σ=
σ 0 00 σ 00 0 σ
et ε =
ε 0 00 ε 00 0 ε
ou σ =
σxx = σσyy = σσzz = σσxy = 0σyz = 0σzx = 0
, ε=
εxx = εεyy = εεzz = ε
2 εxy = 02 εyz = 02 εzx = 0
En utilisant la loi d’élasticité :
σσσ000
=
λ + 2µ λ λ 0 0 0λ λ + 2µ λ 0 0 0λ λ λ + 2µ 0 0 00 0 0 µ 0 00 0 0 0 µ 00 0 0 0 0 µ
εεε000
on obtient une relation entre les deux scalaires σ et ε : σ = (3λ+2µ) ε = 3K ε, où K =(3λ + 2µ)
3est le module de rigidité à la dilatation uniforme (cas de la dilatation d’une sphère sous pression).
3.4.2 État de cisaillement simple
On a σ=
0 σxy 0σxy 0 00 0 0
et ε =
0 εxy 0εxy 0 00 0 0
ou σ=
000
σxy
00
, ε=
000
2 εxy
00
J.-M. CROS, Z.-Q. FENG 5

Université d’Évry-Val d’Essonne CS71 - notes de cours, septembre 2009
En utilisant la loi d’élasticité, il vient : σxy = 2µ εxy = µ γxy où µ = G est appelé module de rigiditéau glissement (ou au cisaillement). Le glissement défini par γxy = 2εxy représente la variation d’angledroit.
y
x
yγxy
x
3.4.3 État de contrainte uniaxial (suivant x)
On considère un tenseur des contraintes uniaxial et l’on déduit alors le tenseur des déformations parla loi de souplesse :
σ =
σxx 0 00 0 00 0 0
⇒ εij =
1 + ν
Eσij − ν
Eσkk δij
︸ ︷︷ ︸loi de souplesse
⇒ ε =1
E
σxx 00 −ν σxx 00 0 −ν σxx
soit : εxx =σxx
Eet εyy = εzz =
−ν σxx
E. Le module de Young E est le module de rigidité à
l’allongement en traction simple.`(1 − νεxx)
L(1 + εxx)
`
L
4 Thermomécanique : contraintes initiales et dilatations thermique
Les contraintes totales en chaque point peuvent résulter de différents effets :
σ = σe + σ0 + σth + . . .
où σe = [D]εe correspond aux contraintes élastiques, σ0 correspond aux contraintes résidu-elles auto-équilibrées, dues à l’histoire du solide (procédé de fabrication) et σth = −[D]εthcorrespond aux contraintes d’origines thermiques.
r Matériau isotrope : εth =< α∆t α∆t α∆t 0 0 0 >T où α est le coefficient de dilation et∆ = T − T0 avec T température imposée et T0 température ambiante.
Ainsi σth3d = −Eα∆T
1 − 2ν< 1 1 1 0 0 0 >T .
En 2D : σth2d = −Eα∆T
1 − b ν< 1 1 0 >T , où b = 1 en CP, b = 2 en DP.
r Matériau orthotrope : εth =< αx∆t αy∆t αz∆t 0 0 0 >T
r Loi de Hooke généralisée : σ = [D]εe + σ0 + σth = [D](εe − εth) + σ0,
et εe = [C](σ − σ0) + εth.
r Énergie de déformation : U =
∫
V
(1
2< ε > [D]ε+ < ε > (σ0 + σth)
)dV
J.-M. CROS, Z.-Q. FENG 6

Université d’Évry-Val d’Essonne CS71 - notes de cours, septembre 2009
5 Déformations planes
Soit un solide de longueur importante suivant z et supposé bloqué dans cette direction. Les com-posantes des déformations suivant l’axe z sont nulles : εxz = εyz = εzz = 0 , alors en utilisant la loide comportement, on peut déterminer les composantes du tenseur des contraintes :
ε =
εxx εxy 0εyx εyy 00 0 0
⇒σij = λ εkkδij + 2µ εij︸ ︷︷ ︸
loi d’élasticité
⇒
σxx σxy 0σxy σyy 00 0 σzz
avec σzz =ν (σxx + σyy)
Sous forme vectorielle, on ne conserve que trois termes puisque le quatrième σzz n’intervient pas dansle calcul des efforts intérieurs, soit :
σ = Dε ⇔
σxx
σyy
σxy
=
E
(1 + ν)(1 − 2ν)
1 − ν ν 0ν 1 − ν 0
0 01 − 2ν
2
εxx
εyy
2 εxy
6 Contraintes planes
Soit une plaque mince d’épaisseur t dont la surface moyenne est situé dans le plan x, y et qui n’admetde charges que dans son plan (les plans normaux à l’axe z ne sont pas chargés). La formule deCauchy implique : σxz = σyz = σzz = 0 , alors en utilisant la loi de comportement, écrite en termede souplesse :
σ=
σxx σxy 0σxy σyy 00 0 0
⇒εij =
1 + ν
Eσij − ν
Eσkk δij
︸ ︷︷ ︸loi de souplesse
⇒
εxx εxy 0εyx εyy 00 0 εzz
avec εzz =
−ν (σxx + σyy)
E
Sous forme vectorielle, on ne conserve que trois termes puisque le quatrième εzz n’intervient pas dansle calcul des efforts intérieurs, soit :
σ = Dε ⇔
σxx
σyy
σxy
=
E
1 − ν2
1 ν 0ν 1 0
0 01 − ν
2
εxx
εyy
2 εxy
7 Équations d’équilibre
- Problème posé sur Ω,- ∂Ω = ∂ΩF
⋃∂ΩU et ∂ΩF
⋂∂ΩU = ∅,
- Conditions aux limites sur ∂Ω : déplacements etefforts donnés :¨ Relations sur ∂ΩF :force surfacique :
−→t = σ(P ) −→n .
¨ Relations sur ∂ΩU : −→u =−→U d.
- Relations déformations-déplacements.- Loi de comportement (contraintes-déformations).
P (X, ρ, fv, σ(P ))
∂ΩU
∂ΩF
Ω
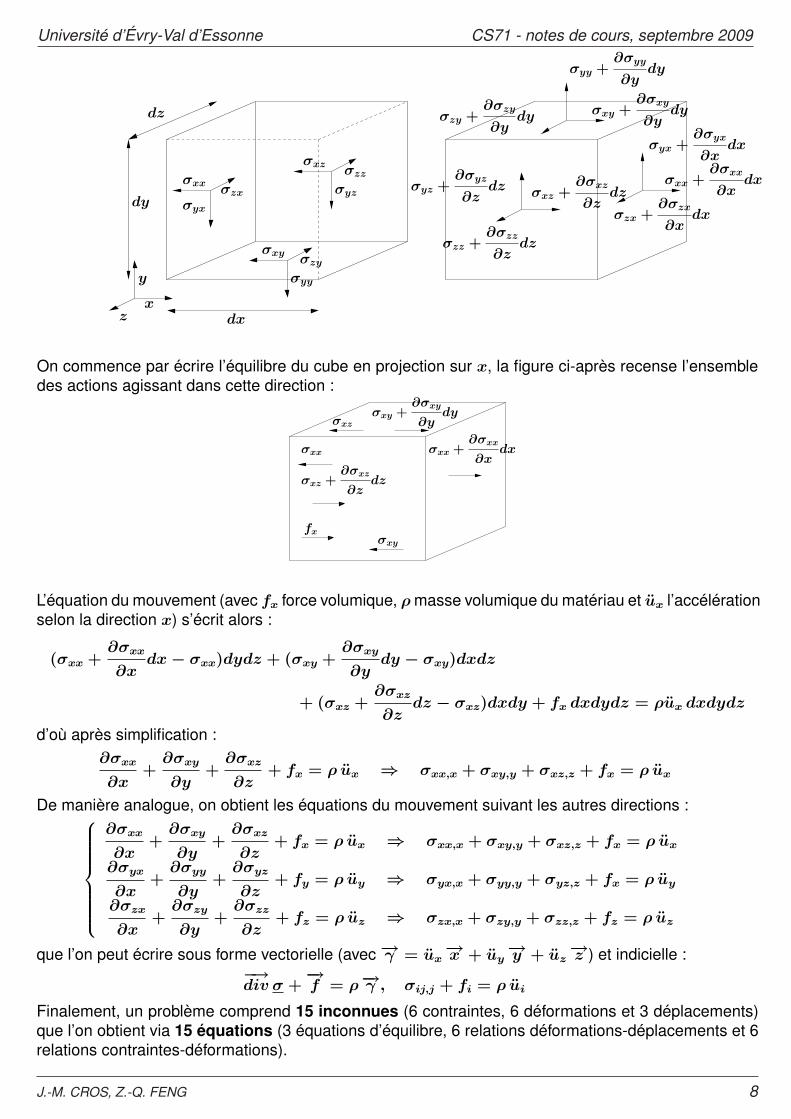
Plusieurs méthodes permettent d’écrire les équations d’équilibre (locale) d’un milieu, on choisit la plus"physique". On isole un petit cube de matière de dimensions dx, dy, dz autour de P , et on fait le bilandes actions extérieures. Pour plus de clarté, on représente les actions sur les 6 faces du cube sur deuxfigures qui représentent le même cube :
J.-M. CROS, Z.-Q. FENG 7
Université d’Évry-Val d’Essonne CS71 - notes de cours, septembre 2009
σyy
σxx +∂σxx
∂xdx
σxy +∂σxy
∂ydyσzy +
∂σzy
∂ydy
σyx +∂σyx
∂xdx
σyz +∂σyz
∂zdz
σzx +∂σzx
∂xdx
σyy +∂σyy
∂ydy
σzz +∂σzz
∂zdz
σxz +∂σxz
∂zdz
z
y
x
dy
dz
σzx
σyx
σzzσxz
σzy
σyzσxx
σxy
dx
On commence par écrire l’équilibre du cube en projection sur x, la figure ci-après recense l’ensembledes actions agissant dans cette direction :
σxz +∂σxz
∂zdz
σxy
σxzσxy +
∂σxy
∂ydy
σxx
fx
σxx +∂σxx
∂xdx
L’équation du mouvement (avec fx force volumique, ρ masse volumique du matériau et ux l’accélérationselon la direction x) s’écrit alors :
(σxx +∂σxx
∂xdx − σxx)dydz + (σxy +
∂σxy
∂ydy − σxy)dxdz
+ (σxz +∂σxz
∂zdz − σxz)dxdy + fx dxdydz = ρux dxdydz
d’où après simplification :∂σxx
∂x+
∂σxy
∂y+
∂σxz
∂z+ fx = ρ ux ⇒ σxx,x + σxy,y + σxz,z + fx = ρ ux
De manière analogue, on obtient les équations du mouvement suivant les autres directions :
∂σxx
∂x+
∂σxy
∂y+
∂σxz
∂z+ fx = ρ ux ⇒ σxx,x + σxy,y + σxz,z + fx = ρ ux
∂σyx
∂x+
∂σyy
∂y+
∂σyz
∂z+ fy = ρ uy ⇒ σyx,x + σyy,y + σyz,z + fx = ρ uy
∂σzx
∂x+
∂σzy
∂y+
∂σzz
∂z+ fz = ρ uz ⇒ σzx,x + σzy,y + σzz,z + fz = ρ uz
que l’on peut écrire sous forme vectorielle (avec −→γ = ux−→x + uy
−→y + uz−→z ) et indicielle :
−→div σ +
−→f = ρ −→γ , σij,j + fi = ρ ui
Finalement, un problème comprend 15 inconnues (6 contraintes, 6 déformations et 3 déplacements)que l’on obtient via 15 équations (3 équations d’équilibre, 6 relations déformations-déplacements et 6relations contraintes-déformations).
J.-M. CROS, Z.-Q. FENG 8
Université d’Évry-Val d’Essonne CS71 - notes de cours, septembre 2009
CHAPITRE 2 : MÉTHODE DES ÉLÉMENTS FINIS
Objectif : dimensionner une structure (avion, pont, pièce d’un assemblage).Deux approches complémentaires (recalage - corrélation) et/ou indépendantes (maquette numérique- certification) : essais - calculs.
r Essais :Conditions de l’essai ? Que mesure-t-on ? Interprétation des résultats ? Échelle de la structure(maquette réduite ou à l’échelle) ? ...
r Calculs :solution analytique, numérique ? précision ? erreur d’arrondi ? erreurs de discrétisation ? ...
Problématique commune : MODÉLISATION (art de l’ingénieur) ⇒ Hypothèses :
r Quel est ou quels sont les phénomènes prépondérants ?
• mécanique, thermique, électro-magnétisme, couplage fluide-structure, ... ?
• statique, dynamique, ... ?
• linéaire, non-linéaire, ... ?
• chargement (pesanteur, ...) ?
• frottement ?
r Peut-on simplifier ? Si oui comment (3d, 2d, 1d, ...) ?
Mise en équations :⇒ RdM (géométries particulières, solution analytique)⇒ Mécanique des Milieux Continus,... ⇒ équations différentielles : solution analytique pour lesgéométries simples sinon solution numérique (discrétisation spatiale et éventuellement temporelle)
Méthodes d’approximation :Pour discrétiser des modèles physiques complexes, on dispose de plusieurs méthodes d’approximation.Ces méthodes remplace le modèle mathématique défini sur un milieu continu (équations différentiellesou intégrales) par un problème mathématique discret (équations matricielles) que l’on sait résoudrenumériquement.
1 Principe de la Méthode des résidus pondérés
Soit un problème physique dont l’inconnue est le champ scalaire u(P ) défini sur un domaine d’étudeΩ. On cherche la solution du modèle mathématique défini par des équations locales sur Ω et desconditions sur ∂Ω la frontière du domaine Ω. Ces équations forment le système d’équations différen-tielles :
L(u) = f ∀P ∈ Ω (équation locale)C(u) = e ∀P ∈ ∂Ω (conditions aux limites)
Le résidu (noté R) est l’erreur commise lorsque l’on utilise une approximation (notée u) pour le champu.
R(u) = L(u) − f ∀P ∈ Ω
J.-M. CROS, Z.-Q. FENG 9
Université d’Évry-Val d’Essonne CS71 - notes de cours, septembre 2009
La méthode des résidus pondérés consiste à annuler l’erreur commise sur le résidu, en la pondérantsur le domaine par un nombre fini de fonctions de pondération ou fonctions tests φi, soit :
Wf =
∫
Ω
φi R(u) dΩ =
∫
Ω
φi
(L(u) − f
)dΩ = 0 ∀φi
Remarque : au lieu de résoudre R(u) = 0, on considère le problème équivalent∫Ω
φ R(u) dΩ = 0.Comme on ne sait pas résoudre analytiquement ce problème, on en cherche une approximation enrestreignant le nombre de fonctions de pondération φ.
Si on construit une approximation u à n paramètres, cela signifie qu’il faut choisir n fonctions depondération afin d’obtenir autant d’équations intégrales que de paramètres, c’est-à-dire un systèmematriciel d’ordre n. L’approximation de u est construite de la façon suivante :
u =n∑
i=1
Ni qi = [N ]q,
où Ni sont les fonctions de forme ou d’interpolation et les qi les paramètres (inconnues que l’oncherche) de l’approximation. Ainsi, les n équations s’écrivent :
∫
Ω
φi R([N ]q
)dΩ = 0 ∀i ∈ [1, n]
En ce qui concerne le choix des fonctions de pondération, on se limite à la méthode de Galerkin. Cetteméthode consiste à prendre comme fonction de pondération les fonctions de forme. L’inconvénientde la méthode réside dans le calcul de l’intégrale sur le domaine, par contre si les opérateurs sontsymétriques, les matrices le sont également.
CHAPITRE 2B : NOTIONS FONDAMENTALES (INGRÉDIENTS)
1 Méthode des résidus pondérés
La méthode des résidus pondérés consiste à approcher partiellement l’annulation du résidu d’uneéquation différentielle pour trouver une solution discrète approximative. Illustrons le concept par l’exem-ple qui suit. Soit l’équation différentielle :
du(x)
dx= −u(x), dans l’intervalle : 0 ≤ x ≤ 1 (domaine d’étude), (1)
avec la condition aux limites suivante : u(x = 0) = 1.
La solution exacte s’écrit : uex = e−x .
On cherche maintenant une solution approchée, sous la forme d’un polynôme de la forme :
u = C1 + C2 x + C3 x2
Cette solution approchée doit satisfaire la condition aux limites : u(x = 0) = 1, on en déduit queC1 = 1. Il reste à trouver C2 et C3. Pour cela, on propose un critère que permettra d’ajuster cescoefficients à la solution exacte. On considère alors le résidu (noté R) que l’on obtient à partir de (1) :
R =du
dx+ u = 0
J.-M. CROS, Z.-Q. FENG 10

Université d’Évry-Val d’Essonne CS71 - notes de cours, septembre 2009
Si u est la solution exacte alors R = 0. Remplaçons u par la solution approchée (commedu
dx=
C2 + 2 C3 x) :
R =du
dx+ u = C2 + 2 C3 x + 1 + C2 x + C3 x2 = 1 + C2(1 + x) + C3(2 x + x2) = 0
L’objectif de d’essayer de rendre ce résidu nul par un moyen quelconque. Les moyens les plus utiliséssont : méthode des moindres carrés, méthode de Galerkin, méthode de collocation par points,...
1.1 Méthode de Galerkin
Principe : on considère que les moyennes pondérées du résidu sur l’ensemble du domaines’annulent. Les pondérations sont choisies parmi les fonctions qui ont servi à construire la solu-tion approchée.
Pour notre exemple, cela revient à calculer les quantités suivantes :∫ 1
0
x R dx = 0 (pondération : x, domaine : [0; 1], moyenne : intégrale),∫ 1
0
x2 R dx = 0 (pondération : x2, domaine : [0; 1], moyenne : intégrale).
soit∫ 1
0
x R dx =
∫ 1
0
x(1 + C2(1 + x) + C3(2 x + x2)
)dx
=
∫ 1
0
x + C2(x + x2) + C3(2 x2 + x3) dx =1
2+ C2
5
6+ C3
11
12= 0
et∫ 1
0
x2 R dx =
∫ 1
0
x2(1 + C2(1 + x) + C3(2 x + x2)
)dx
=
∫ 1
0
x2 + C2(x2 + x3) + C3(2 x3 + x4) dx =
1
3+ C2
7
12+ C3
14
20= 0
On obtient un système linéaire de deux équations à deux inconnues C2 et C3.
1
2+ C2
5
6+ C3
11
12= 0
1
3+ C2
7
12+ C3
14
20= 0
La résolution de ce système permet d’obtenir les coefficients : C2 = −32
35et C3 =
2
7. Finalement, la
solution approchée s’écrit : u = 1 − 32
35x +
2
7x2 .
2 Approximation nodale
Dans l’exemple précédent, les coefficients indéterminés Ci n’ont pas de signification physique,il serait intéressant d’exprimer ces coefficients en fonction de valeurs discrètes de la fonction solution.Prenons une solution approchée :
u = C1 + C2 x + C3 x2
J.-M. CROS, Z.-Q. FENG 11

Université d’Évry-Val d’Essonne CS71 - notes de cours, septembre 2009
et exprimons les solutions discrètes (notées u1, u2 et u3) aux points x = 0, 1/2 et 1, afin d’obtenirune relation entre les Ci et les ui :
u1 = u(0) = C1 + C2 × 0 + C3 × 0u2 = u(1/2) = C1 + C2 × 1/2 + C3 × 1/4u3 = u(1) = C1 + C2 × 1 + C3 × 1
que l’on peut mettre sous forme matricielle :
u1
u2
u3
︸ ︷︷ ︸un
=
1 0 01 1/2 1/41 1 1
︸ ︷︷ ︸[X]
C1
C2
C3
︸ ︷︷ ︸Cn
notations :
vecteur colonne n × 1,[ ] matrice n × n,< > vecteur ligne 1 × n.
(2)
On peut alors écrire les coefficients Ci en fonction des ui, en effet :
Cn
=
[X
]−1 un
avec
[X
]−1
=1
detX
[co-facteur X
]t
=
1 0 0−3 4 −1
2 −4 2
Comme la solution approchée peut également s’écrire sous la forme suivante :
u(x) = C1 + C2 x + C3 x2 = < 1 x x2︸ ︷︷ ︸P (x)
>
C1
C2
C3
= < P (x) >
Cn
= < P (x) >
[X
]−1 un
= < 1 x x2 >
1 0 0−3 4 −1
2 −4 2
u1
u2
u3
u(x) = < 1 − 3 x + 2 x2 4 x − 4 x2 − x + 2 x2
︸ ︷︷ ︸N(x)
>
u1
u2
u3
= < N(x) >
un
= (1 − 3 x + 2 x2) u1 + (4 x − 4 x2) u2 + (−x + 2 x2) u3.
On peut vérifier au passage que : u(x = 0) = u1, u(x = 1/2) = u2 et u(x = 1) = u3.
Les coefficients (u1, u2 et u3 pour l’instant inconnus) intervenants dans la solution approchée ont,maintenant, une signification physique.
3 Approximation d’une fonction par morceaux
La technique développée précédemment n’est pastrès pratique. Si le domaine d’étude est complexe(surface, volume, ...), la solution approchée étantcherchée sous la forme d’un polynôme son de-gré deviendra très élevé. En effet, la solution ap-prochée est définie sur l’ensemble du domaine.Pour contourner cette difficulté, on peut chercherà approximer la solution exacte (notée uex) parsous-domaines de telle sorte que l’erreur entrela fonction exacte et la fonction approchée (oud’approximation) soit suffisamment petite.
x
u
xi xi+1
J.-M. CROS, Z.-Q. FENG 12

Université d’Évry-Val d’Essonne CS71 - notes de cours, septembre 2009
En généralisant, nous pouvons concevoir qu’une surface peut être approximée par des facettes parexemple. Le choix de la fonction approchée ne se limite pas nécessairement à des fonctions linéaires.Cependant, nous nous limiterons ici à des fonctions polynomiales de degré n. Comme le montre lafigure, une fonction quelconque peut être approchée par une série de fonctions linéaires sur un certainnombre de sous intervalles. Afin de réduire l’erreur e(x), il convient de choisir un critère quelconque,ce qui nous permettra de déterminer les coefficients C1, C2, . . . ,Cn. En se référant à la figure, nouspouvons choisir le critère qui consiste à spécifier que l’erreur e(x) s’annule pour les abscissesxi. La fonction exacte, uex, est approximée par des fonctions linéaires (par exemple) de la forme :
u(x) = C1 + C2 x
pour xi < x < xi+1 avec i = 1, n
et vérifient uex(xi) = u(xi), uex(xi+1) = u(xi+1), soit uex(xi) = C1 + C2 xi et uex(xi+1) =C1 + C2 xi+1 que l’on peut mettre sous forme matricielle :
uex(xi)uex(xi+1)
=
[1 xi
1 xi+1
]C1
C2
alors
C1
C2
=
[1 xi
1 xi+1
]−1uex(xi)uex(xi+1)
(3)
Les limites xi et xi+1 du sous intervalle ainsi que les valeurs de la fonction exacte correspondant à ceslimites étant connues, il est aisé d’obtenir les valeurs des paramètres indéterminés Cn. Ce concept segénéralise pour toutes fonctions polynomiales de degré n−1. Sous forme matricielle à une dimension,ces fonctions peuvent avoir la forme suivante :
u(x) = < 1 x x2 . . . xn−1︸ ︷︷ ︸P (x)
>
C1
C2
C3...
Cn
=< P (x) >
Cn
(4)
Le vecteur ligne < P (x) > est appelé la base polynomiale et le vecteur colonne Cn constituel’ensemble des paramètres indéterminés. Ainsi, d’une manière générale, le système matriciel (3) s’écritcomme suit :
uex(xi)uex(xi+1)
...uex(xi+n−1)
=
< 1 x . . . xn−1 >i
< 1 x . . . xn−1 >i+1...
< 1 x . . . xn−1 >i+n−1
︸ ︷︷ ︸[X]
C1
C2...
Cn
⇒
Cn
=
[X
]−1 un
(5)
Les coefficients Ci n’ayant pas de signification physique, on utilise les résultats du paragraphe précé-dent. En combinant (4) et (5), on obtient :
u(x) =< P (x) >
Cn
=< P (x) >
[X
]−1 un
=< N(x) >
un
(6)
qui est une forme approchée de uex en fonction de valeurs discrètes de cette dernière. Ce résultatest fondamental car, que la fonction uex(x) soit connue ou non, il est toujours possible de l’approximerpar une fonction de valeurs discrètes connues ou non. Si la fonction uex est inconnue nous avonsici un outil qui nous permet de la remplacer en approximant par une forme où seules des valeursdiscrètes de la fonction sont inconnues. Il s’agit là d’un processus de discrétisation largementutilisé dans la méthode des éléments finis. La fonction (6) est appelée fonction d’approximationou d’interpolation définissant une approximation nodale.
J.-M. CROS, Z.-Q. FENG 13

Université d’Évry-Val d’Essonne CS71 - notes de cours, septembre 2009
3.1 Exemple
Appliquons l’approximation nodale au système (3) :
uex(x1)uex(x2)
=
[1 x1
1 x2
]C1
C2
⇒
C1
C2
=
[1 x1
1 x2
]−1u1
u2
L’inversion de la matrice donne :[
1 x1
1 x2
]−1
=1
x2 − x1
[x2 −x1
−1 1
]
En utilisant la relation (6), il vient alors :
u(x)= < P (x) >[X
]−1un
=< 1 x >
1
x2 − x1
[x2 −x1
−1 1
]u1
u2
(7)
= <x2 − x
x2 − x1
x − x1
x2 − x1
>
u1
u2
=< N1(x) N2(x) >
u1
u2
=< N(x) >
un
(8)
4 Définitions et propriétés
On définit alors comme noeuds les positions xi et comme élément le sous intervalle auquel ellesappartiennent. Les valeurs de u associées à un noeud sont les valeurs nodales, on parle aussi dedegrés de liberté : en 3d, par exemple, on peut avoir pour chaque nœud, trois degrés de liberté : ux,uy et uz ou pour un élément de poutre en chaque nœud 6 degrés de liberté : 3 déplacements ux, uy,uz et 3 rotations rx, ry et rz.
4.1 Propriétés de l’approximation nodale
À la lumière de l’exemple proposé ici, nous constatons que :
Nj(xi) =
0 si i 6= j1 si i = j
(9)
En effet, par définition du critère nous permettant d’évaluer les paramètres indéterminés, nous avonsimposé que la valeur de la fonction exacte et de la fonction approchée devait coïncider aux noeuds. Eneffet, si nous reprenons l’expression (8), évaluons uex(x) en x = x1 :
uex(x1) =< N1(x1) N2(x1) >
u1
u2
= N1(x1) u1 + N2(x1) u2 = u1
Pour vérifier cette relation, on doit avoir N2(x1) = 0 et N1(x1) = 1, c’est-à-dire :
u(x1) =<x2 − x1
x2 − x1
x1 − x1
x2 − x1
>
u1
u2
=< 1 0 >
u1
u2
= u1
Les conditions (9) permet d’avoir des conditions pour déterminer les coefficients des polynômes d’in-terpolations. Exemple d’un polynôme du second degré (interpolation quadratique) de la forme N(x) =a x2 + b x + c, l’élément est composé de trois nœuds (abscisses : x1, x2 et x3) alors pour déterminerles coefficients du polynôme N2(x), on a les conditions suivantes :
N2(x1) = a x21 + b x1 + c = 0, N2(x2) = a x2
2 + b x2 + c = 1, N2(x3) = a x23 + b x3 + c = 0,
J.-M. CROS, Z.-Q. FENG 14
Université d’Évry-Val d’Essonne CS71 - notes de cours, septembre 2009
soit un système de trois équations à trois inconnues (a, b et c).On peut également utiliser les polynômes de Lagrange pour déterminer les polynômes d’interpolationNi(x) :
Ni(x) =n∏
j=1j 6=i
x − xj
xi − xj
Appliquons cette définition pour un élément à deux nœuds (interpolation linéaire) :
N1(x) =x − x2
x1 − x2
et N2(x) =x − x1
x2 − x1
, on retrouve les expressions (8).
4.2 Dérivées de la fonction d’interpolation
Dans le cas que nous considérons ici, c’est-à-dire l’emploi de fonctions d’interpolation polynomiales dedegré n−1, il est évident que seules les dérivées jusqu’à l’ordre n−1 existent. Ceci est extrêmementimportant en ce qui concerne le choix du degré d’une fonction d’interpolation en fonction de l’ordre del’équation différentielle. Par exemple, une fonction d’interpolation linéaire (de degré 1) ne pourra pasêtre directement utilisée pour approximer une dérivée de seconde puisque sa dérivée d’ordre 2 estnulle. Si u(x) =< N(x) >
un
alors :
du(x)
dx=
d
dx
(< N(x) >
un
)=<
dN(x)
dx>
un
car seule la fonction d’interpolation dépend de x.
CHAPITRE 2C : MISE EN ŒUVRE DE LA MÉTHODE DES ÉLÉMENTS FINIS
1 Exemple d’application en mécanique
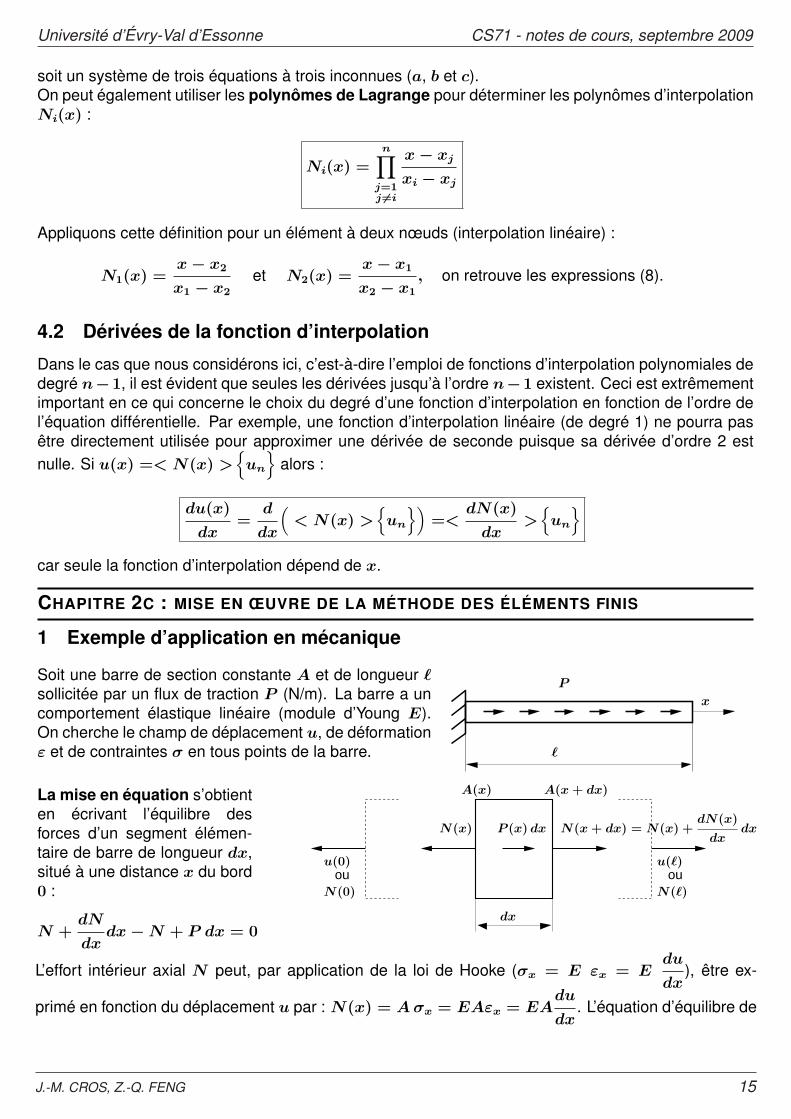
Soit une barre de section constante A et de longueur `sollicitée par un flux de traction P (N/m). La barre a uncomportement élastique linéaire (module d’Young E).On cherche le champ de déplacement u, de déformationε et de contraintes σ en tous points de la barre.
P
x
`
La mise en équation s’obtienten écrivant l’équilibre desforces d’un segment élémen-taire de barre de longueur dx,situé à une distance x du bord0 :
N +dN
dxdx − N + P dx = 0
ouou
dx
A(x) A(x + dx)
N(`)
u(`)
N(x + dx) = N(x) +dN(x)
dxdxP (x) dxN(x)
N(0)
u(0)
L’effort intérieur axial N peut, par application de la loi de Hooke (σx = E εx = Edu
dx), être ex-
primé en fonction du déplacement u par : N(x) = A σx = EAεx = EAdu
dx. L’équation d’équilibre de
J.-M. CROS, Z.-Q. FENG 15
Université d’Évry-Val d’Essonne CS71 - notes de cours, septembre 2009
la barre (une dimension) et conditions aux limites (formulées en déplacement, c’est-à-dire en fonctionde u) s’écrit finalement :
EAd2u
dx2+ P = 0, 0 < x < `,
N(x = `) =(du
dx
)x=`
= 0 en x = `,
u = 0, en x = 0.
(10)
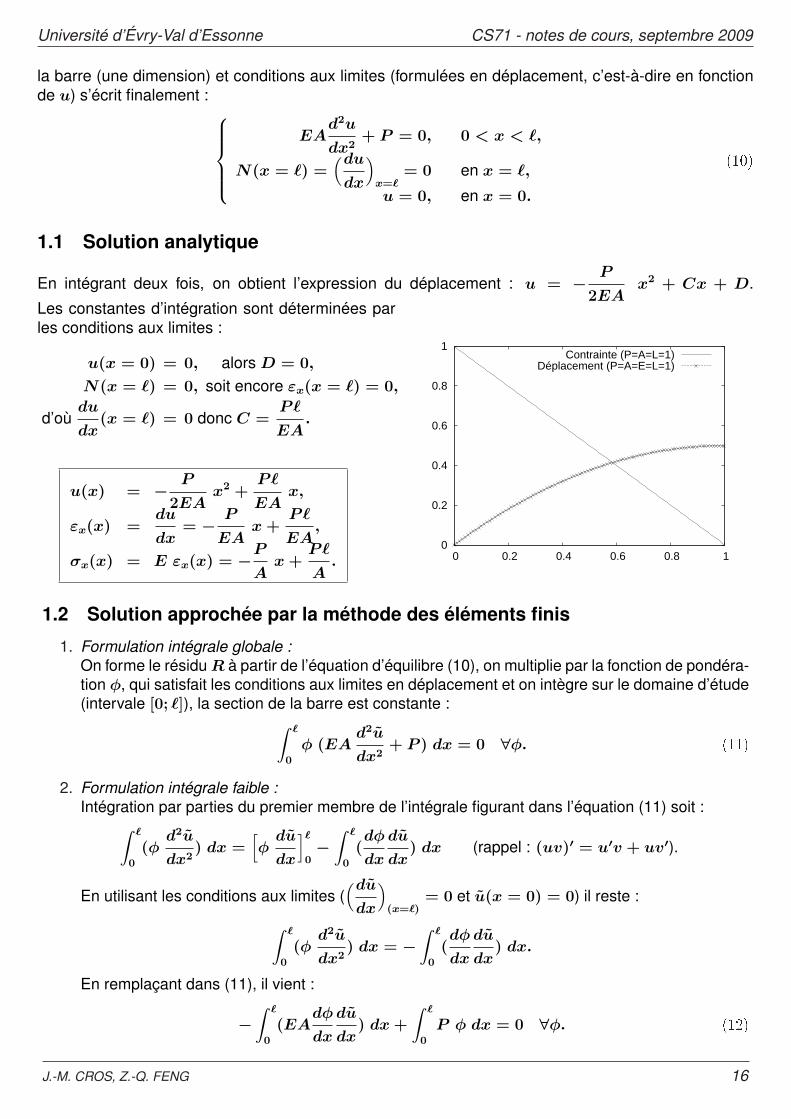
1.1 Solution analytique
En intégrant deux fois, on obtient l’expression du déplacement : u = − P
2EAx2 + Cx + D.
Les constantes d’intégration sont déterminées parles conditions aux limites :
u(x = 0) = 0, alors D = 0,
N(x = `) = 0, soit encore εx(x = `) = 0,
d’oùdu
dx(x = `) = 0 donc C =
P`
EA.
u(x) = − P
2EAx2 +
P`
EAx,
εx(x) =du
dx= − P
EAx +
P`
EA,
σx(x) = E εx(x) = −P
Ax +
P`
A.
0
0.2
0.4
0.6
0.8
1
0 0.2 0.4 0.6 0.8 1
Contrainte (P=A=L=1)Déplacement (P=A=E=L=1)
1.2 Solution approchée par la méthode des éléments finis
1. Formulation intégrale globale :On forme le résidu R à partir de l’équation d’équilibre (10), on multiplie par la fonction de pondéra-tion φ, qui satisfait les conditions aux limites en déplacement et on intègre sur le domaine d’étude(intervale [0; `]), la section de la barre est constante :
∫ `
0
φ (EAd2u
dx2+ P ) dx = 0 ∀φ. (11)
2. Formulation intégrale faible :Intégration par parties du premier membre de l’intégrale figurant dans l’équation (11) soit :
∫ `
0
(φd2u
dx2) dx =
[φ
du
dx
]`
0−
∫ `
0
(dφ
dx
du
dx) dx (rappel : (uv)′ = u′v + uv′).
En utilisant les conditions aux limites ((du
dx
)(x=`)
= 0 et u(x = 0) = 0) il reste :
∫ `
0
(φd2u
dx2) dx = −
∫ `
0
(dφ
dx
du
dx) dx.
En remplaçant dans (11), il vient :
−∫ `
0
(EAdφ
dx
du
dx) dx +
∫ `
0
P φ dx = 0 ∀φ. (12)
J.-M. CROS, Z.-Q. FENG 16

Université d’Évry-Val d’Essonne CS71 - notes de cours, septembre 2009
3. Discrétisation : Méthode de Galerkin (la fonction test est prise comme égale à la variation dudéplacement : φ = δu).Le domaine d’étude est discrétisé à l’aide d’un élément de barre à deux nœuds de longueur `.C’est-à-dire que le déplacement dans l’élément est interpolé à l’aide du déplacement des deuxextrémités de la barre. L’interpolation est linéaire, de sorte que l’on peut écrire pour un élémentde barre (nœuds 1 et 2) :
u(x) =<N(x)> un =<N1(x) N2(x)>
u1
u2
=<un > N(x) =<u1 u2 >
N1(x)N2(x)
un représente la valeur de u en chaque nœud de l’élément.Ces fonctions N1(x) et N2(x)sont construites pour vérifieru(x = 0) = u1 et u(x = `) = u2.Explicitons (polynôme de Lagrange)les fonctions d’interpolation linéaired’un élément de barre (longueur` = x2 − x1) à deux nœuds (1 et 2) :
N1(x) =x − x2
x1 − x2
= 1 − x
`, (13)
N2(x) =x − x1
x2 − x1
=x
`. (14) 0
0.2
0.4
0.6
0.8
1
0 0.2 0.4 0.6 0.8 1
N1(x)N2(x)
Avec ces fonctions et à l’aide de la relation u(x) =<N(x)> un, on peut calculer le déplace-ment en n’importe quel point de l’élément.
On souhaite remplacer u(x) dans l’équation (12), il faut donc évaluerdu
dx:
du
dx=
d(< N(x) > un)
dx=<
dN(x)
dx> un =< un > dN(x)
dx
soit à partir des expressions (13) et (14) :dN1(x)
dx= −1
`et
dN2(x)
dx=
1
`.
Ainsi pour cet élément fini, la discrétisation de l’équation (12) s’écrit :
−∫ `
0
EA <φn > dN(x)
dx <
dN(x)
dx> un dx +
∫ `
0
P <φn > N(x) dx = 0.
Comme φn et un ne dépendent pas de la variable d’intégration x, on peut écrire :
< φn >(
−∫ `
0
EAdN(x)
dx <
dN(x)
dx> dx un + P
∫ `
0
N(x) dx)
= 0.
Cette relation est vérifiée quelque soit la fonction test < φn >, on peut simplifier comme suit :
(−
∫ `
0
EAdN(x)
dx <
dN(x)
dx> dx un + P
∫ `
0
N(x) dx)
= 0. (15)
Il reste à évaluer les différentes intégrales en utilisant les fonctions d’interpolation :
dN(x)
dx <
dN(x)
dx>=
dN1(x)
dxdN2(x)
dx
<dN1(x)
dx
dN2(x)
dx>=
1
`2
[1 −1
−1 1
](16)
J.-M. CROS, Z.-Q. FENG 17

Université d’Évry-Val d’Essonne CS71 - notes de cours, septembre 2009
alors :∫ `
0
EAdN(x)
dx <
dN(x)
dx> dx =
∫ `
0
EA
`2
[1 −1
−1 1
]dx =
EA
`
[1 −1
−1 1
](17)
De même :
∫ `
0
N(x) dx =
∫ `
0
1 − x
`x
`
dx =
[x]`
0−
[x2
2 `
]`
0[x2
2`
]`
0
=
`
2
11
(18)
Il ne reste plus qu’a remplacer dans (15) pour obtenir l’équation discrétisée qui prend alors laforme d’un système linéaire ([K] un = fn) :
EA
`
[1 −1
−1 1
] u1
u2
=
P`
2
11
+
Rx1
0
,
ici [K] =EA
`
[1 −1
−1 1
]et fn =
P`
2
11
+
Rx1
0
.
Système de deux équations à deux inconnues : u2 et Rx1 (qui représente la réaction à l’encas-trement), rappelons que u1 est connu car imposé par une condition aux limites.
4. Résolution :Avant de résoudre, il faut prendre en compte les conditions aux limites en déplacement (ici en-
castrement au niveau du nœud 1, soit u1 = 0), d’où les solutions : u1 = 0, u2 =P`2
2EA.
5. Post-traitement :
• Le champ de déplacement u(x) est alors obtenue par interpolation via la relation :
u(x) =<N(x)> un =<N1(x) N2(x)>
u1
u2
=<(1 − x
`)
x
`>
0P`2
2EA
=
P`
2EAx.
• La déformation ε(x) :
ε(x)=<dN1(x)
dx
dN2(x)
dx>
u1
u2
=<−1
`
1
`>
0P`2
2EA
=
P`
2EAconstante.
• Et enfin la contrainte σ(x) = E ε(x) =P`
2Aqui est constante dans la barre.
• On peut également calculer la réaction (notée Rx1) au niveau de l’encastrement, pour celail faut calculer le produit [K]u (u étant maintenant connu) soit :
EA
`
[1 −1
−1 1
]
0P`2
2EA
dont le résultat est
−P`
2P`
2
, (19)
par ailleurs, les forces extérieures agissant sur les nœuds s’écrivent :
Rx1 +P`
2P`
2
. (20)
J.-M. CROS, Z.-Q. FENG 18
Université d’Évry-Val d’Essonne CS71 - notes de cours, septembre 2009
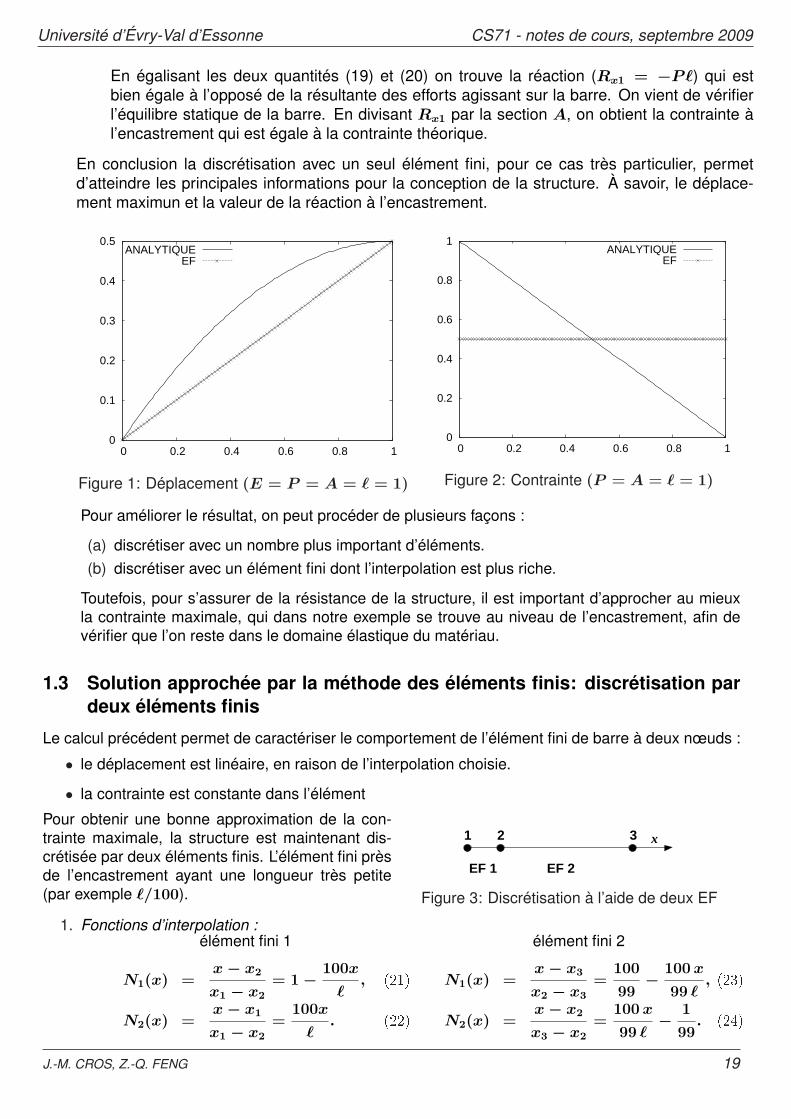
En égalisant les deux quantités (19) et (20) on trouve la réaction (Rx1 = −P`) qui estbien égale à l’opposé de la résultante des efforts agissant sur la barre. On vient de vérifierl’équilibre statique de la barre. En divisant Rx1 par la section A, on obtient la contrainte àl’encastrement qui est égale à la contrainte théorique.
En conclusion la discrétisation avec un seul élément fini, pour ce cas très particulier, permetd’atteindre les principales informations pour la conception de la structure. À savoir, le déplace-ment maximun et la valeur de la réaction à l’encastrement.
0
0.1
0.2
0.3
0.4
0.5
0 0.2 0.4 0.6 0.8 1
ANALYTIQUEEF
Figure 1: Déplacement (E = P = A = ` = 1)
0
0.2
0.4
0.6
0.8
1
0 0.2 0.4 0.6 0.8 1
ANALYTIQUEEF
Figure 2: Contrainte (P = A = ` = 1)
Pour améliorer le résultat, on peut procéder de plusieurs façons :
(a) discrétiser avec un nombre plus important d’éléments.(b) discrétiser avec un élément fini dont l’interpolation est plus riche.
Toutefois, pour s’assurer de la résistance de la structure, il est important d’approcher au mieuxla contrainte maximale, qui dans notre exemple se trouve au niveau de l’encastrement, afin devérifier que l’on reste dans le domaine élastique du matériau.
1.3 Solution approchée par la méthode des éléments finis: discrétisation pardeux éléments finis
Le calcul précédent permet de caractériser le comportement de l’élément fini de barre à deux nœuds :
• le déplacement est linéaire, en raison de l’interpolation choisie.
• la contrainte est constante dans l’élément
Pour obtenir une bonne approximation de la con-trainte maximale, la structure est maintenant dis-crétisée par deux éléments finis. L’élément fini prèsde l’encastrement ayant une longueur très petite(par exemple `/100).
1 2 3 x
EF 1 EF 2
Figure 3: Discrétisation à l’aide de deux EF
1. Fonctions d’interpolation :élément fini 1
N1(x) =x − x2
x1 − x2
= 1 − 100x
`, (21)
N2(x) =x − x1
x1 − x2
=100x
`. (22)
élément fini 2
N1(x) =x − x3
x2 − x3
=100
99− 100 x
99 `, (23)
N2(x) =x − x2
x3 − x2
=100 x
99 `− 1
99. (24)
J.-M. CROS, Z.-Q. FENG 19
Université d’Évry-Val d’Essonne CS71 - notes de cours, septembre 2009
2. Calcul des matrices de rigidité élémentaires : Il faut au préalable recalculer (16) puis calculerl’intégrale (17), les bornes allant de 0 à `/100 pour l’élément 1 et de `/100 à ` pour l’élément 2.En fait, pour cet élément ce n’est pas nécessaire car la matrice de raideur est proportionnelle àl’inverse de la longueur de l’élément, ainsi à partir de l’expression (17) valable pour un élémentde longueur `, on obtient :
[K1
]=
100 × EA
`
[1 −1
−1 1
]
︸ ︷︷ ︸u1 u2
et[K2
]=
100 × EA
99 × `
[1 −1
−1 1
]
︸ ︷︷ ︸u2 u3
3. Calcul du chargement nodal :Dans la méthode des éléments finis, les conditions aux limites (déplacements ou forces) s’appli-que au niveau des nœuds, d’où le terme chargement nodal. Ces forces nodales sont obtenuesen calculant l’intégrale (18). Mais, comme pour les matrices de rigidité, on peut obtenir directe-ment le résultat, puisque pour ce cas, les forces nodales sont proportionnelles à la longueur del’élément, ainsi à partir de l’expression (18) valable pour un élément de longueur `, on obtient :
f1
=
f1
1
f12
=
P`
100 × 2
11
,
f2
=
f2
2
f23
=
99 × P`
100 × 2
11
.
Notons au passage que la somme des composantes des forces nodales (f11 + f1
2 + f22 + f2
3 ) estégale à P` qui n’est autre que la résultante du chargement appliqué sur la barre.
4. Assemblage des quantités élémentaires :
[K
]
u1
u2
u3
=
f1
f2
f3
soit
100 × EA
`
1 −1 0
−1 1 +1
99− 1
99
0 − 1
99
1
99
u1
u2
u3
=
P`
100 × 2
11 + 99
99
5. Résolution :Avant de résoudre, il faut prendre en compte les conditions aux limites en déplacement (ici en-castrement au niveau du nœud 1, soit u1 = 0), d’où le système linéaire à résoudre :
100 × EA
`
1 +1
99− 1
99
− 1
99
1
99
u2
u3
=
P`
100 × 2
1 + 99
99
Dont les solutions sont : u2 =P`2 × (100 + 99)
2EA × 100 × 100et u3 =
P`2
2EA.
6. Post-traitement :La contrainte (constante) dans l’élément 1 est obtenue par la relation : σ(x) = E ε(x). Soit :
ε(x)=<dN1(x)
dx
dN2(x)
dx>
u1
u2
=<−100
`
100
`>
0P`2 (100 + 99)
2EA × 1002
=
P` (100 + 99)
2EA × 100.
d’où l’expression de la contrainte dans la barre 1 : σ(x ∈ [0, `/100]) =P` (100 + 99)
2A × 100.
Ainsi, avec deux éléments finis, on approxime très bien la contrainte à l’encastrement, en effet :
σanalytique(x = 0) =P`
Aet σélément fini(x = 0) =
P`
A× 199
200.
J.-M. CROS, Z.-Q. FENG 20

Université d’Évry-Val d’Essonne CS71 - notes de cours, septembre 2009
CHAPITRE 3 : PRINCIPE DES TRAVAUX VIRTUELS (PTV)
(PFD)
Méthodes d’approximation
formes intégrales
discrétisation
formes matricielles
Système physique continu
Méthodes variationelles(PTV)
Formes différentielles
méthodes des résidus pondérés
Mise en équations
1 Introduction
Dans certains domaine de la physique, des considérations énergétiques permettent la formulation duproblème en tant que principe variationnel, aboutissant ainsi à une formulation intégrale. L’intérêt deces principes est de fournir directement la forme intégrale sans avoir à passer par les équations auxdérivées partielles. La formulation mathématique du principe est basée sur les mêmes hypothèsesde modélisation du problème physique. En mécanique des structures le principe le plus courammentutilisé est le principe des travaux virtuels (PTV). Le PTV est une traduction sous forme intégrale del’équilibre du solide.
2 Quelques relations utiles pour la suite
r Opérateurs différentiels : gradient, divergence :
- Relations entre champs scalaires et champs vectoriels :Le gradient d’une fonction scalaire f(x, y, z) définie au point P de composantes x, y, z s’écrit (no-
tation indicielle f,i) :−−→grad f =
f,x =∂f
∂x
f,y =∂f
∂y
f,y =∂f
∂z
,
et il est tel que : df = f,x dx + f,y dy + f,z dz =−−→grad f .
−−→dM .
Soit −→v un vecteur de composantes (vx, vy, vz); la divergence du vecteur −→v est le scalaire défini
par : div −→v = vx,x + vy,y + vz,z =∂vx
∂x+
∂vy
∂y+
∂vz
∂z.
- Relations entre champs vectoriels et champs tensoriels :Soit −→v un vecteur de composantes (vx, vy, vz); l’opérateur tenseur gradient de ce vecteur −→v
J.-M. CROS, Z.-Q. FENG 21

Université d’Évry-Val d’Essonne CS71 - notes de cours, septembre 2009
(notation indicielle vi,j) s’écrit : grad −→v =
vx,x vx,y vx,z
vy,x vy,y vy,z
vz,x vz,y vz,z
. Avec d−→v = grad −→v .
−−→dM .
Soit T un tenseur du second ordre : T =
Txx Txy Txz
Tyx Tyy Tyz
Tzx Tzy Tzz
. Le vecteur divergence de ce
tenseur (notation indicielle Tij,j) est défini par : div T =
Txx,x + Txy,y + Txz,z
Tyx,x + Tyy,y + Tyz,y
Tzx,x + Tzy,y + Tzz,z
.
r Le tenseur linéarisé des déformations (tenseur de Green-Lagrange) s’écrit :
ε =1
2(grad
−→U + (grad
−→U )T )
On peut décomposer le tenseur h = grad−→U en parties symétrique et antisymétrique :
h =1
2(h + hT )
︸ ︷︷ ︸symétrique
+1
2(h − hT )
︸ ︷︷ ︸antisymétrique
=1
2(grad
−→U + (grad
−→U )T ) +
1
2(grad
−→U − (grad
−→U )T )
= grads
−→U + grada
−→U
On constate que la partie symétrique du tenseur gradient des déplacements coïncide avec letenseur linéarisé de Green-Lagrange. On dit que ce tenseur est la partie symétrique du tenseurgradient des déplacements :
ε =1
2(grad
−→U + (grad
−→U )T ) = grads
−→U .
r Seconde formule de Green (pour les opérateurs symétriques) :
div(−→v . T ) = −→v . divT + T : grad−→v .
Appliquons cette relation avec −→v =−→U et T = σ, où σ est le tenseur symétrique des con-
traintes :
div(−→U . σ) =
−→U . divσ + σ : grad
−→U .
comme grad−→U = grads
−→U + grada
−→U :
σ : grad−→U = σ : grads
−→U + σ : grada
−→U = σ : grads
−→U
car le produit doublement contracté entre un tenseur symétrique et un tenseur antisymétrique estnul, donc :
div(−→U . σ) =
−→U . divσ + σ : grads
−→U .
Explicitons au passage le calcul du produit doublement contracté
T : σ = Tij σij =3∑
i=1
3∑
j=1
Tij σij = scalaire.
r Formule de Gauss-Ostrogradski (ou théorème de la divergence) :Cette relation relie l’intégrale de volume et l’intégrale de surface :
∫
Ω
div−→v dΩ =
∫
∂Ω
−→v .−→n dS, où dS est un petit élément de frontière ∂Ω.
J.-M. CROS, Z.-Q. FENG 22

Université d’Évry-Val d’Essonne CS71 - notes de cours, septembre 2009
2.1 Énoncé du principe
Soit δ−→u un déplacement virtuel, le principe des travaux virtuel (PTV) s’énonce comme suit :Le travail virtuel de tous les efforts (tant extérieurs qu’intérieurs) est égal au travail virtuel des quantitésd’accélération pour tout déplacement virtuel δ−→u :
Trouver −→u −→u = −→u d sur ∂Ωu tel que ∀ δ−→u , Wa = Wi + We
avec Wa =
∫
Ω
δ−→u .−→γ (P )dm(P ) =
∫
Ω
δ−→u .ρ−→u dΩ,
et Wi = −∫
Ω
ε(δ−→u ) : σ dΩ,
attention, le tenseur des déformations doit être exprimé avec le champ de déplacement virtuel δ−→u ,
et We =
∫
∂Ωu
δ−→u −→t udS +
∫
∂Ωf
δ−→u −→t f dS +
∫
Ω
δ−→u −→f v dΩ
Attention : l’expression du travail des efforts extérieurs (We) fait apparaître explicitement le champdes efforts inconnus
−→t u actions des liaisons) qui correspond aux conditions limites cinématiques :
∀ P ∈ ∂Ωu−→u = −→u d. Si nous utilisons une approximation quelconque du champ des déplacements,
nous obtenons une équation intégrale pour deux champs inconnus, et nous ne pourrons pas résoudrele problème. Pour résoudre, il faut tenir compte a posteriori des conditions aux limites cinématiquesdans les équations du modèle. On utilise une approximation dite cinématiquement admissible :−→u = −→u d sur ∂Ωu et δ−→u = 0 sur ∂Ωu alors :
We =
∫
∂Ωf
δ−→u −→t f dS +
∫
Ω
δ−→u −→f v dΩ
D’où le PTV :
Trouver −→u u = ud sur ∂Ωu tel que,∀ δ−→u (cinématiquement admissible),
−∫
Ω
ε(δ−→u ) : σ dΩ +
∫
∂Ωf
δ−→u −→t f dS +
∫
Ω
δ−→u −→f v dΩ =
∫
Ω
δ−→u .ρ−→u dV
r δ−→u est une fonction de pondération ou fonction test.
r Le PTV exprime l’équilibre du solide sous forme intégrale avec pondération par δ−→u et il estindépendant de la loi de comportement du matériau.
r Pour les sollicitations concentrées, Fi aux points Pi, le travail virtuel externe associé s’écrit :We =
∑i δ−→u (Pi) Fi.
r HPP (Hypothèse des Petites Pertubations = déplacements et gradients des déplacements sup-posés petits) : ces hypothèses permettent de confondre les configurations déformées et nondéformées pour écrite les équations d’équilibre et effectuer les intégrations.
r Énergie potentielle totale :Dans le cas stationnaire (pas de forces d’inertie), On peut définir une fonctionnelle (notée Π),appelée énergie potentielle totale telle que :
W (u) = δ(Π(u)) =∂Π
∂u.δ−→u = 0 avec Π(u) = Πint(u) − Πext(u).
où Πint est l’énergie interne de déformation :
Πint =
∫
Ω
1
2ε(u) : σ dΩ =
∫
Ω
1
2ε(u)T [D] ε(u) dΩ =
∫
Ω
1
2< ε(u) > [D] ε(u) dΩ
J.-M. CROS, Z.-Q. FENG 23

Université d’Évry-Val d’Essonne CS71 - notes de cours, septembre 2009
et Πext est le potentiel des forces de volume et de surface :
Πext =
∫
∂Ωf
−→u −→t f dS +
∫
Ω
−→u −→f v dΩ =
∫
∂Ωf
uT −→t f dS +
∫
Ω
uT −→f v dΩ
=
∫
∂Ωf
< u >−→t f dS +
∫
Ω
< u >−→f v dΩ
On peut alors énoncer le Principe du minimum de l’énergie potentielle totale :Parmi tous les champs de déplacements cinématiquement admissible celui qui rend Π mini-mum correspond à la solution du problème.
2.2 Retrouvons les équations d’équilibre à partir du PTV
À partir du PTV, il est possible de retrouver les équations locales du mouvement et les conditions auxlimites en effort.
Trouver −→u u = ud sur ∂Ωu tel que,∀ δ−→u (cinématiquement admissible),
−∫
Ω
ε(δ−→u ) : σ dΩ +
∫
∂Ωf
δ−→u −→t f dS +
∫
Ω
δ−→u −→f v dΩ =
∫
Ω
δ−→u .ρ−→u dV
En utilisant la formule de Green :
div(δ−→u . σ) = δ−→u . divσ + σ : gradsδ−→u = δ−→u . divσ + σ : ε(δ−→u ),
il vient
∀ δ−→u , −∫
Ω
div(δ−→u . σ) dΩ+
∫
Ω
δ−→u . divσ dΩ+
∫
∂Ωf
δ−→u −→t f dS+
∫
Ω
δ−→u −→f v dΩ=
∫
Ω
δ−→u .ρ−→u dV
En utilisant ensuite la formule de Gauss-Ostrogradski :∫
Ω
div(δ−→u . σ)dΩ =
∫
∂Ω
δ−→u .σ −→n dS, où dS est un petit élément de frontière ∂Ω.
D’où finalement :
∀ δ−→u −∫
∂Ω
δ−→u .σ −→n dS +
∫
Ω
δ−→u . divσ dΩ+
∫
∂Ωf
δ−→u −→t f dS +
∫
Ω
δ−→u −→f v dΩ=
∫
Ω
δ−→u .ρ−→u dV
r Si on choisit un champ de déplacement virtuel nul sur la frontière et quelconque et non nul àl’intérieur du domaine, il reste :
∀ δ−→u∫
Ω
δ−→u . divσ dΩ +
∫
Ω
δ−→u −→f v dΩ =
∫
Ω
δ−→u .ρ−→u dV
∀ δ−→u∫
Ω
δ−→u (divσ +−→f v − ρ−→u )dΩ = 0
qui entraîne : divσ +−→f v = ρ−→u , on retrouve l’équation locale du mouvement.
r En prenant, un champ de déplacement virtuel qui vérifient l’équilibre local et qui est non nul sur
la frontière, il reste ∀ δ−→u∫
∂Ω
δ−→u (−σ −→n +−→t f) dS = 0 qui entraîne :
−→t f = σ −→n sur ∂Ω,
on retrouve la formule de Cauchy.
r La condition sur ∂Ωu est contenu dans la définition du champ cinématiquement admissible pour−→u : −→u = −→u d sur ∂Ωu.
J.-M. CROS, Z.-Q. FENG 24
Université d’Évry-Val d’Essonne CS71 - notes de cours, septembre 2009
¨§
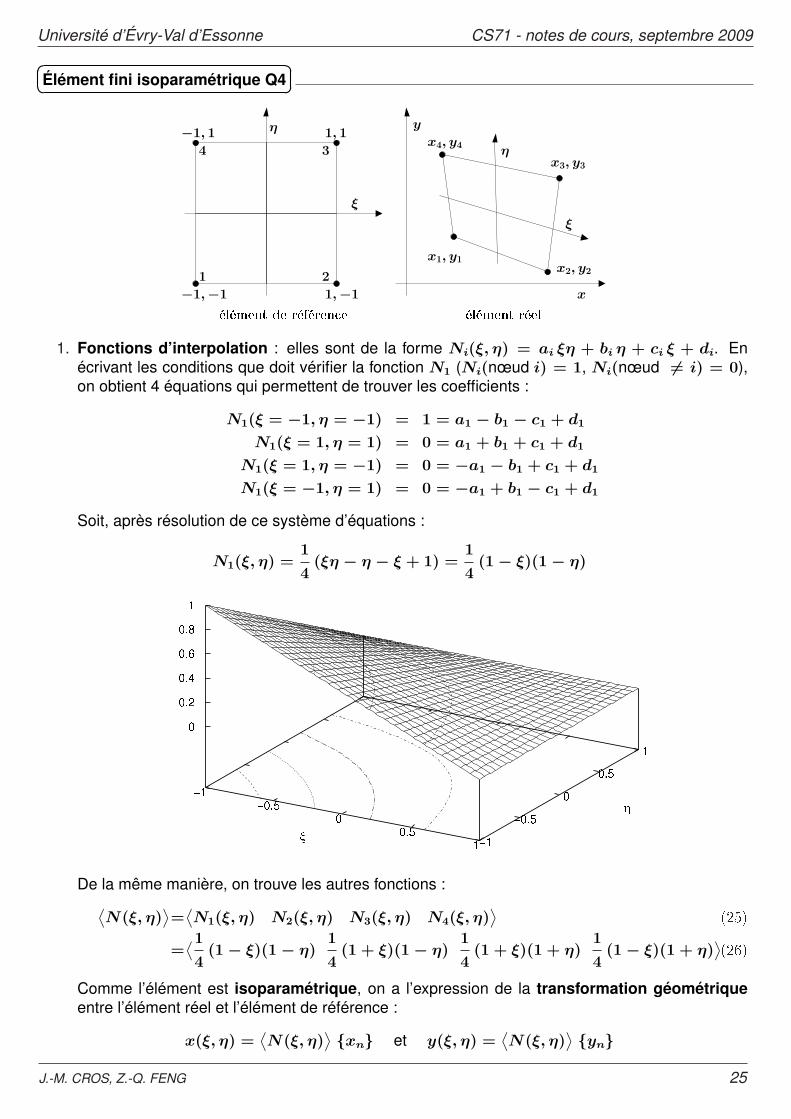
¥¦Élément fini isoparamétrique Q4
x4, y4
ξ
1 2
4
−1, −1 1, −1
1, 1−1, 1
3
élément de référence
η y
x
élément réel
η
ξ
x1, y1x2, y2
x3, y3
1. Fonctions d’interpolation : elles sont de la forme Ni(ξ, η) = ai ξη + bi η + ci ξ + di. Enécrivant les conditions que doit vérifier la fonction N1 (Ni(nœud i) = 1, Ni(nœud 6= i) = 0),on obtient 4 équations qui permettent de trouver les coefficients :
N1(ξ = −1, η = −1) = 1 = a1 − b1 − c1 + d1
N1(ξ = 1, η = 1) = 0 = a1 + b1 + c1 + d1
N1(ξ = 1, η = −1) = 0 = −a1 − b1 + c1 + d1
N1(ξ = −1, η = 1) = 0 = −a1 + b1 − c1 + d1
Soit, après résolution de ce système d’équations :
N1(ξ, η) =1
4(ξη − η − ξ + 1) =
1
4(1 − ξ)(1 − η)
De la même manière, on trouve les autres fonctions :⟨N(ξ, η)
⟩=
⟨N1(ξ, η) N2(ξ, η) N3(ξ, η) N4(ξ, η)
⟩(25)
=⟨1
4(1 − ξ)(1 − η)
1
4(1 + ξ)(1 − η)
1
4(1 + ξ)(1 + η)
1
4(1 − ξ)(1 + η)
⟩(26)
Comme l’élément est isoparamétrique, on a l’expression de la transformation géométriqueentre l’élément réel et l’élément de référence :
x(ξ, η) =⟨N(ξ, η)
⟩ xn et y(ξ, η) =⟨N(ξ, η)
⟩ yn
J.-M. CROS, Z.-Q. FENG 25

Université d’Évry-Val d’Essonne CS71 - notes de cours, septembre 2009
Remarque : une autre technique plus rapide permet d’obtenir les fonctions d’interpolation, voicison principe. L’interpolation peut s’écrire sous cette forme :
u(ξ, η) = C1 + C2 ξ + C3 η + C4 ξη =< 1 ξ η ξη︸ ︷︷ ︸P (ξ, η)
>
C1
C2
C3
C4
︸ ︷︷ ︸Cn
=< P (ξ, η) >
Cn
où les Ci sont des coefficients à déterminer.Exprimons alors les solutions discrètes ou nodales (notées u1, u2 u3 et u4) aux nœuds 1, 2,3 et 4 afin d’obtenir une relation entre les Ci et les ui :
u1 = u(−1, −1) = C1 + C2 × −1 + C3 × −1 + C4 × −1 × −1u2 = u(1, −1) = C1 + C2 × 1 + C3 × −1 + C4 × 1 × −1u3 = u(1, 1) = C1 + C2 × 1 + C3 × 1 + C4 × 1 × 1u4 = u(−1, 1) = C1 + C2 × −1 + C3 × 1 + C4 × −1 × 1
que l’on peut mettre sous forme matricielle :
u1
u2
u3
u4
︸ ︷︷ ︸un
=
1 −1 −1 11 1 −1 −11 1 1 11 −1 1 −1
︸ ︷︷ ︸[P (ξn, ηn)]
C1
C2
C3
C4
︸ ︷︷ ︸Cn
notations :
vecteur colonne n × 1,[ ] matrice n × n,< > vecteur ligne 1 × n,avec T =< > et < >T = .
On peut alors écrire les coefficients Ci en fonction des ui, en effet :
Cn
=
[P (ξn, ηn)
]−1 un
,
avec[P (ξn, ηn)
]−1
=1
det [P (ξn, ηn)]
[co-facteur [P (ξn, ηn)]
]T
=1
4
1 1 1 1−1 1 1 −1−1 −1 1 1
1 −1 1 −1
En remplaçant le vecteur Cn dans l’expression de la solution approchée, il vient :
u = C1 + C2 ξ + C3 η + C4 ξη =< P (ξ, η) >
Cn
= < P (ξ, η) >
[P (ξn, ηn)
]−1 un
= < 1 ξ η ξη >1
4
1 1 1 1−1 1 1 −1−1 −1 1 1
1 −1 1 −1
u1
u2
u3
u4
=
⟨1
4(1 − ξ − η + ξη)
1
4(1 + ξ − η − ξη)
1
4(1 + ξ + η + ξη)
1
4(1 − ξ + η − ξη)
︸ ︷︷ ︸Ni(ξ, η)
⟩
u1
u2
u3
u4
= < N(ξ, η) >
un
On peut vérifier au passage que : u(ξ = −1, η = −1) = u1, u(ξ = 1, η = −1) = u2, ...L’avantage de cette approche est qu’elle ne nécessite qu’une seule inversion de matrice (contrequatre).
J.-M. CROS, Z.-Q. FENG 26

Université d’Évry-Val d’Essonne CS71 - notes de cours, septembre 2009
2. Matrice jacobienne : par analogie avec la matrice jacobienne d’un élément T3, on a :
[J
]2×2
=
[∂x(ξ,η)
∂ξ
∂y(ξ,η)
∂ξ∂x(ξ,η)
∂η
∂y(ξ,η)
∂η
]=
[∂N1(ξ,η)
∂ξ
∂N2(ξ,η)
∂ξ
∂N3(ξ,η)
∂ξ
∂N4(ξ,η)
∂ξ∂N1(ξ,η)
∂η
∂N2(ξ,η)
∂η
∂N3(ξ,η)
∂η
∂N4(ξ,η)
∂η
]
x1 y1
x2 y2
x4 y3
x4 y4
=1
4
[ −(1 − η) (1 − η) (1 + η) −(1 + η)−(1 − ξ) −(1 + ξ) (1 + ξ) (1 − ξ)
]
x1 y1
x2 y2
x4 y3
x4 y4
=
[J11 J12
J21 J22
]
3. Matrice [B] : par définition,
[B
]3×8
=
∂N1
∂x0 ∂N2
∂x0 ∂N3
∂x0 ∂N4
∂x0
0 ∂N1
∂y0 ∂N2
∂y0 ∂N3
∂y0 ∂N4
∂y∂N1
∂y∂N1
∂x∂N2
∂y∂N2
∂x∂N3
∂y∂N3
∂x∂N4
∂y∂N4
∂x
avec ∂Ni
∂x∂Ni
∂y
= [J ]−1
∂Ni
∂ξ∂Ni
∂η
=
[j11 j12
j21 j22
] ∂Ni
∂ξ∂Ni
∂η
=
j11 × ∂Ni
∂ξ+ j12 × ∂Ni
∂η
j21 × ∂Ni
∂ξ+ j22 × ∂Ni
∂η
il est donc facile de construire la matrice [B]. Il convient de remarquer que cette matrice dépendde ξ et η. En conséquence, les déformations, ainsi que les contraintes, ne sont pas constantesdans l’élément, en effet ε3×1 = [B(ξ, η)] un. C’est pour cette raison que l’on préfère utilisercet élément plutôt que l’élément T3 pour lequel les déformations sont constantes.
4. Matrice de rigidité élémentaire :La matrice [B] et la matrice jacobienne dépendent de ξ etη, en conséquence, il faut utiliser l’intégration numériquepour calculer la matrice de rigidité élémentaire. La mé-thode de Gauss intègre exactement tous les polynômesd’ordre m ≤ 2 n+1 (incluant les monômes ξaηb tels quea + b ≤ m)
∫ +1
−1
∫ +1
−1
f(ξ, η) dξdη ≈n∑
i=1
n∑
j=1
wi wj f(ξi, ηj).
Pour notre cas, on utilise 4 points (2 × 2) ¥ de Gauss oud’intégration (n=2) avec ξ1 = η1 = −ξ2 = −η2 = − 1√
3
et les poids w1 = w2 = 1.
1√3, − 1√
3
ξ
1 2
4 3
η
− 1√3,
1√3
1√3,
1√3
− 1√3, − 1√
3
[Ke
]8×8
=2∑
i=1
2∑
j=1
([B]t
([D] wi wj det(J) e
)[B]
)
(ξi,ηj)
=
([B]t
([D] e det(J)
)[B]
)
(ξ1=− 1√3
,η1=− 1√3)
+
([B]t
([D] e det(J)
)[B]
)
(ξ1=− 1√3
,η2=1√3)
+
([B]t
([D] e det(J)
)[B]
)
(ξ2=1√3
,η1=− 1√3)
+
([B]t
([D] e det(J)
)[B]
)
(ξ2=1√3
,η2=1√3)
où e représente l’épaisseur de l’élément (e = 1 en déformation plane).
J.-M. CROS, Z.-Q. FENG 27
Université d’Évry-Val d’Essonne CS71 - notes de cours, septembre 2009
Pour chaque point d’intégration (ξi, ηi), il faut donc calculer la matrice jacobienne, puis l’inversede la matrice jacobienne et enfin la matrice [B].Remarque : on calcule [B]t
([D] e det(J)
)[B] plutôt que [B]t[D][B] e det(J) car cela néces-
site moins d’opérations arithmétiques, en effet la matrice [D] est de taille plus réduite 3 × 3 quela matrice [Ke] de taille 8 × 8.
5. Extrapolation des contraintes :Les contraintes ne sont pas évaluées directement aux nœuds : σ = [D][B(ξ, η)] un. Il estplus précis d’évaluer les contraintes aux points d’intégration (points de Gauss) puis d’extrapolerle résultat aux nœuds de l’élément :
σe(ξ′, η′) = < N(ξ′, η′) >
σe′n
où les fonctions d’interpolation sont données par(26). Sachant que ξ = ξ′/
√3, η = η′/
√3,
et ξ′ = ξ√
3, η′ = η√
3.
e′
3
21
4 η′
ξ′
4′3′
2′1′
ξ
η 3
21
4
e
Exemple pour la contrainte σexx : nœud 1; ξ = −1 ⇒ ξ′ = −√
3, η = −1 ⇒ η′ = −√3, nœud
2; ξ = 1 ⇒ ξ′ =√
3, η = −1 ⇒ η′ = −√3, ... :
σexx(nœud 1)
σexx(nœud 2)
σexx(nœud 3)
σexx(nœud 4)
=
1 + 12
√3 −1
21 − 1
2
√3 −1
2
−12
1 + 12
√3 −1
21 − 1
2
√3
1 − 12
√3 −1
21 + 1
2
√3 −1
2
−12
1 − 12
√3 −1
21 + 1
2
√3
σe′xx(ξ1, η1)
σe′xx(ξ2, η1)
σe′xx(ξ2, η2)
σe′xx(ξ1, η2)
Par la suite, on peut calculer (affichage des contraintes lissées) la moyenne des contributions dechaque élément sur un même nœud.Exemple, un nœud commun à 3 éléments : σxx(nœud) = (σ1
xx + σ2xx + σ3
xx)/3.¨§
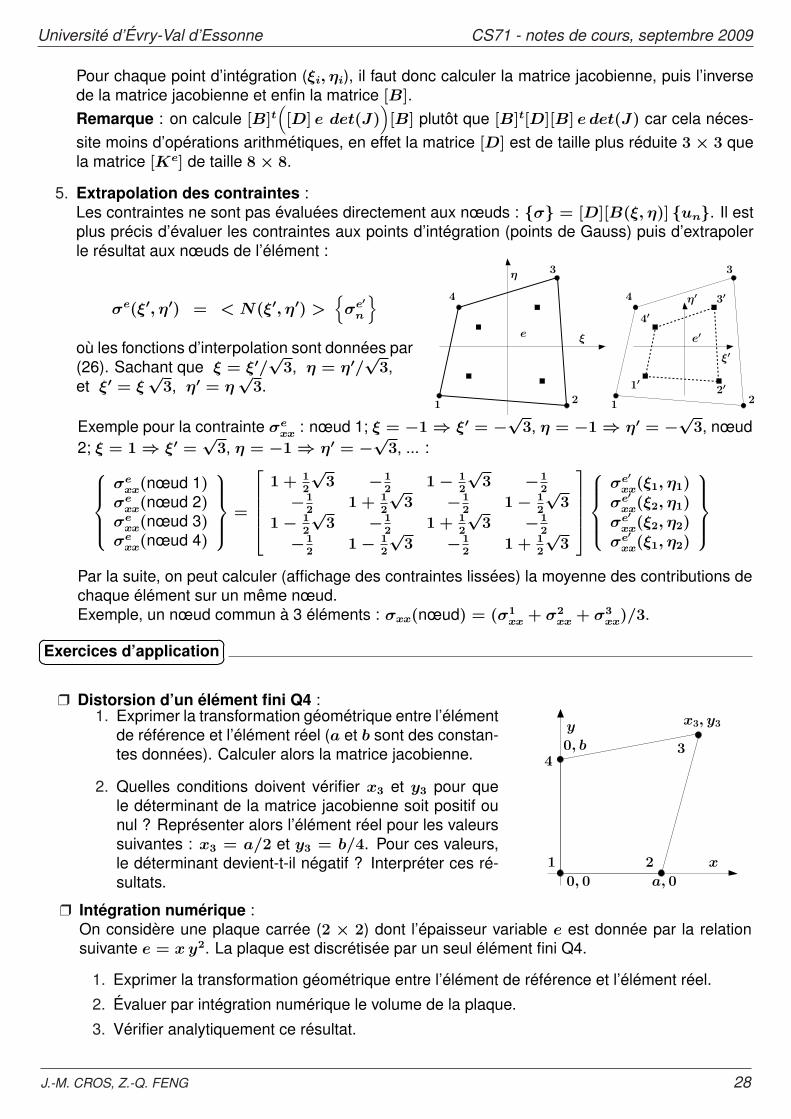
¥¦Exercices d’application
r Distorsion d’un élément fini Q4 :1. Exprimer la transformation géométrique entre l’élément
de référence et l’élément réel (a et b sont des constan-tes données). Calculer alors la matrice jacobienne.
2. Quelles conditions doivent vérifier x3 et y3 pour quele déterminant de la matrice jacobienne soit positif ounul ? Représenter alors l’élément réel pour les valeurssuivantes : x3 = a/2 et y3 = b/4. Pour ces valeurs,le déterminant devient-t-il négatif ? Interpréter ces ré-sultats.
3
0, 0
x
y
1
a, 0
x3, y3
0, b4
2
r Intégration numérique :On considère une plaque carrée (2 × 2) dont l’épaisseur variable e est donnée par la relationsuivante e = x y2. La plaque est discrétisée par un seul élément fini Q4.
1. Exprimer la transformation géométrique entre l’élément de référence et l’élément réel.
2. Évaluer par intégration numérique le volume de la plaque.
3. Vérifier analytiquement ce résultat.
J.-M. CROS, Z.-Q. FENG 28
Université d’Évry - Val d’Essonne Feuilles d’exercices - CS71 - 2009¨§
¥¦Exercices de révision (RdM, élasticité)
1. Résistance d’un pilier du POPBLe toit du Palais Omnisport de Paris Bercy repose sur quatre piliers cylindriques en béton de 15 mde hauteur et de 7, 5 m de diamètre. Ces piliers supportent une masse de 80 000 tonnes quicomprend celle du toit et des équipements et des charges temporaires (neige, ...). Sachant quela contrainte de rupture du béton ordinaire en compression vaut entre 20 et 30 MPa, vérifier larésistance des piliers et déterminer l’ordre du coefficient de sécurité. Est-il nécessaire de prendreen compte le poids propre (masse volumique du béton ρ = 2000 kg/m3) ?
2. Allongement d’un sandowCalculer la force nécessaire pour étirer de 50 % un sandow en caoutchouc (E = 2 MPa) de10 mm de diamètre.
Sandow : cordon de caoutchouc élastique dont on se sert pour attacher des objets sur un sup-port. Synonyme : tendeur.
3. Calcul thermo-mécaniqueOn considère un conducteur en silicium d’un circuit intégré modélisé par une barre encastrée àses extrémités. Le conducteur est soudé à la température T0 et subit en service une élévation detempérature de T − T0 = 50C. Déterminer la contrainte d’origine thermique qu’il subit.
Données :coefficient de dilatation du silicium α = 2, 6 10−5 C−1, module d’élasticité E = 470 GPa.
4. Dilatation d’un rail de chemin de ferUn rail de chemin de fer est posé à la température de 10C. Le coefficient de dilatation de l’acierest connu α = 12 10−6 /C. Calculer la dilatation de ce rail lorsque la température est égale à40C en été et −10C en hiver. En déduire l’allongement pour un rail d’une longueur de 2 km.
5. Contraintes thermiquesOn soumet un barreau d’aluminium (E = 70 GPa, α = 23 10−6 /C) de section 100 mm2 etde longueur 2 m à un force axiale de traction de 10 kN . On demande de calculer l’abaissementde température nécessaire pour que l’allongement total du barreau soit nul.
6. Dimensionnement d’une pile de viaduc
On considère une pile de viaduc qui supporte une chargeponctuelle F = 6000 kN . Les sections sont de formecarrée constante. Le poids propre est pris en compte.Déterminer les sections S et S′ de sorte que l’on restedans le domaine élastique. Calculer l’écrasement de lapile.
Données : module d’élasticité E = 105 000 daN/cm2,limite pratique d’élasticité (compression) Rp =16 daN/cm2, masse volumique ρ = 2000 kg/m3,g = 10 m/s2, a = 20 m, b = 40 m, F = 6 000 kN .
section carrée S′
−→x
−→F
−→ya
b
O
B
C
−→g
section carrée S
J.-M. Cros, Z.-Q. Feng 1
Université d’Évry - Val d’Essonne Feuilles d’exercices - CS71 - 2009
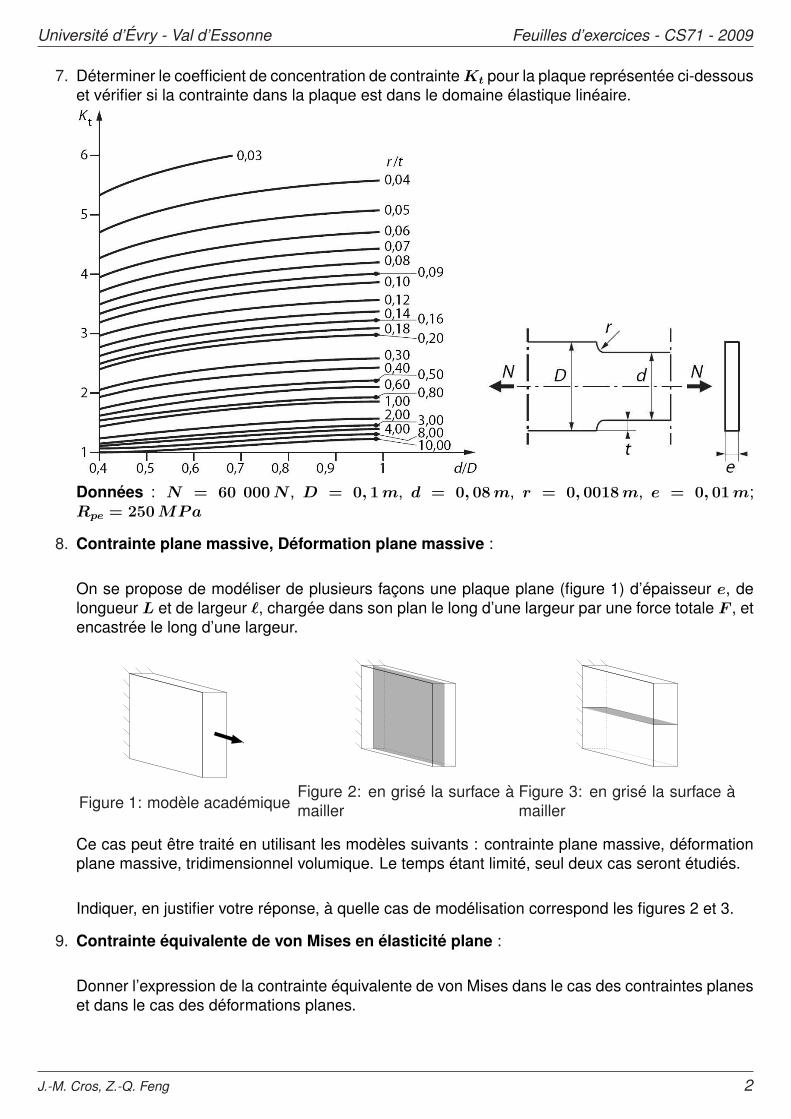
7. Déterminer le coefficient de concentration de contrainte Kt pour la plaque représentée ci-dessouset vérifier si la contrainte dans la plaque est dans le domaine élastique linéaire.
Données : N = 60 000 N , D = 0, 1 m, d = 0, 08 m, r = 0, 0018 m, e = 0, 01 m;Rpe = 250 MPa
8. Contrainte plane massive, Déformation plane massive :
On se propose de modéliser de plusieurs façons une plaque plane (figure 1) d’épaisseur e, delongueur L et de largeur `, chargée dans son plan le long d’une largeur par une force totale F , etencastrée le long d’une largeur.
Figure 1: modèle académiqueFigure 2: en grisé la surface àmailler
Figure 3: en grisé la surface àmailler
Ce cas peut être traité en utilisant les modèles suivants : contrainte plane massive, déformationplane massive, tridimensionnel volumique. Le temps étant limité, seul deux cas seront étudiés.
Indiquer, en justifier votre réponse, à quelle cas de modélisation correspond les figures 2 et 3.
9. Contrainte équivalente de von Mises en élasticité plane :
Donner l’expression de la contrainte équivalente de von Mises dans le cas des contraintes planeset dans le cas des déformations planes.
J.-M. Cros, Z.-Q. Feng 2

Université d’Évry - Val d’Essonne Feuilles d’exercices - CS71 - 2009
¨§
¥¦Dimensionnement d’une colonne
Déterminer à l’aide de la M.E.F. les éléments permettant de dimension-ner grossièrement cette structure qui supporte un avion (5 tonnes).
1. Proposer un modèle (hypothèses de modélisation).
2. Écrire les équations mathématiques associées à ce modèle.
3. Résoudre ce problème par la M.E.F.
4. Tracer et commenter les différentes quantités qui servent au di-mensionnement.
L
L
A1
A2=2xA1
¨§
¥¦Barre 1D
Soit une barre homogène, de section constante S et de longueur ` (figure 4), sollicitée soit par un fluxde traction ou densité linéique P (en N/m), soit par une force ponctuelle (notée F ) au point B oupar son poids propre (on note g l’intensité du champ local de pesanteur et ρ la masse volumique dumatériau constituant la barre). La barre est encastrée au point A.
P
L
gx
F
BA
Figure 4: Configuration du problème
1. Calculer analytiquement le champs de déplacement u(x), le champ de déformation ε(x) et lechamp de contraintes σ(x). Tracer l’évolution de u(x) et de σ(x) le long de la barre.
2. Écrire la formulation intégrale forte puis faible de ce problème.
3. Discrétiser la barre avec un élément fini linéaire à deux nœuds. Calculer u(x), ε(x) et σ(x).Calculer la réaction à l’encastrement. Tracer l’évolution de u(x) et de σ(x) le long de la barre.
4. Discrétiser la barre avec deux éléments finis linéaires à deux nœuds (longueur `/2). Calculeru(x), ε(x) et σ(x). Calculer la réaction à l’encastrement. Tracer l’évolution de u(x) et de σ(x)le long de la barre.
5. Commenter les résultats.
J.-M. Cros, Z.-Q. Feng 3
Université d’Évry - Val d’Essonne Feuilles d’exercices - CS71 - 2009
¨§
¥¦TREILLIS
On considère une structure planeconstituée par trois barres. On de-mande de calculer :
1. Les déplacements des nœuds.
2. Les réactions aux appuis.
3. Les contraintes internes dans lesbarres.
4. Le déplacement du point P .
Les données du problème sont :
a = 400 mm, b = 100 mm,A1 = 20 mm2, A2 = 10 mm2,E = 200 000 MPa, F = 105 N.
A
a
2a
B
F
C
Y
X
E, A
E, A
1
2
P
E, A 1
b
¨§
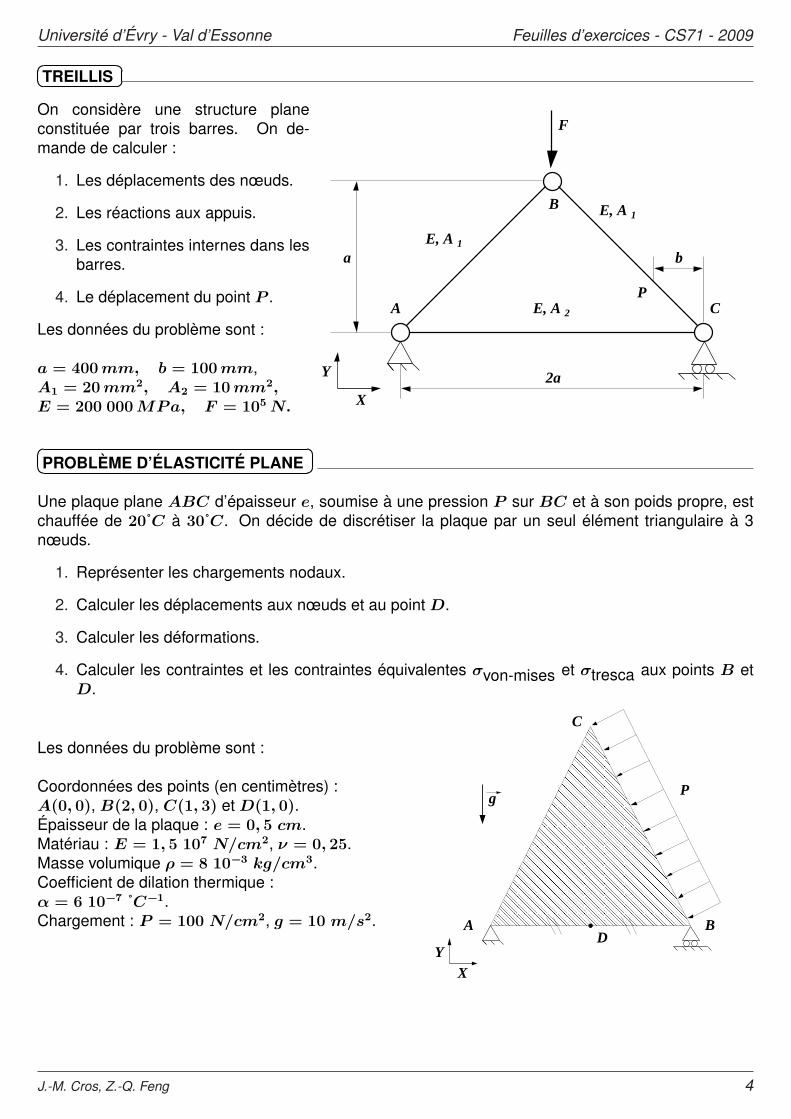
¥¦PROBLÈME D’ÉLASTICITÉ PLANE
Une plaque plane ABC d’épaisseur e, soumise à une pression P sur BC et à son poids propre, estchauffée de 20˚C à 30˚C. On décide de discrétiser la plaque par un seul élément triangulaire à 3nœuds.
1. Représenter les chargements nodaux.
2. Calculer les déplacements aux nœuds et au point D.
3. Calculer les déformations.
4. Calculer les contraintes et les contraintes équivalentes σvon-mises et σtresca aux points B etD.
Les données du problème sont :
Coordonnées des points (en centimètres) :A(0, 0), B(2, 0), C(1, 3) et D(1, 0).Épaisseur de la plaque : e = 0, 5 cm.Matériau : E = 1, 5 107 N/cm2, ν = 0, 25.Masse volumique ρ = 8 10−3 kg/cm3.Coefficient de dilation thermique :α = 6 10−7 ˚C−1.Chargement : P = 100 N/cm2, g = 10 m/s2.
P
A B
C
YX
g
D
J.-M. Cros, Z.-Q. Feng 4
Université d’Évry - Val d’Essonne Feuilles d’exercices - CS71 - 2009
¨§
¥¦POUTRE EN FLEXION SIMPLE
On considère (figure 5) une poutre ABC encastrée en A et C et soumise à une force F en B.On demande de calculer :
1. Les déplacements et les rotations aux points A, B et C.
2. Les réactions aux points A et C.
Les données du problème sont :dimensions : AB = 4 m, BC = 2 m,section de la poutre : a = 12 mm, b = 100 mm,matériau : E = 105 MPa,chargement : F = 3 KN .
b
a
A C
L
F
B
Figure 5: configuration du problème
¨§
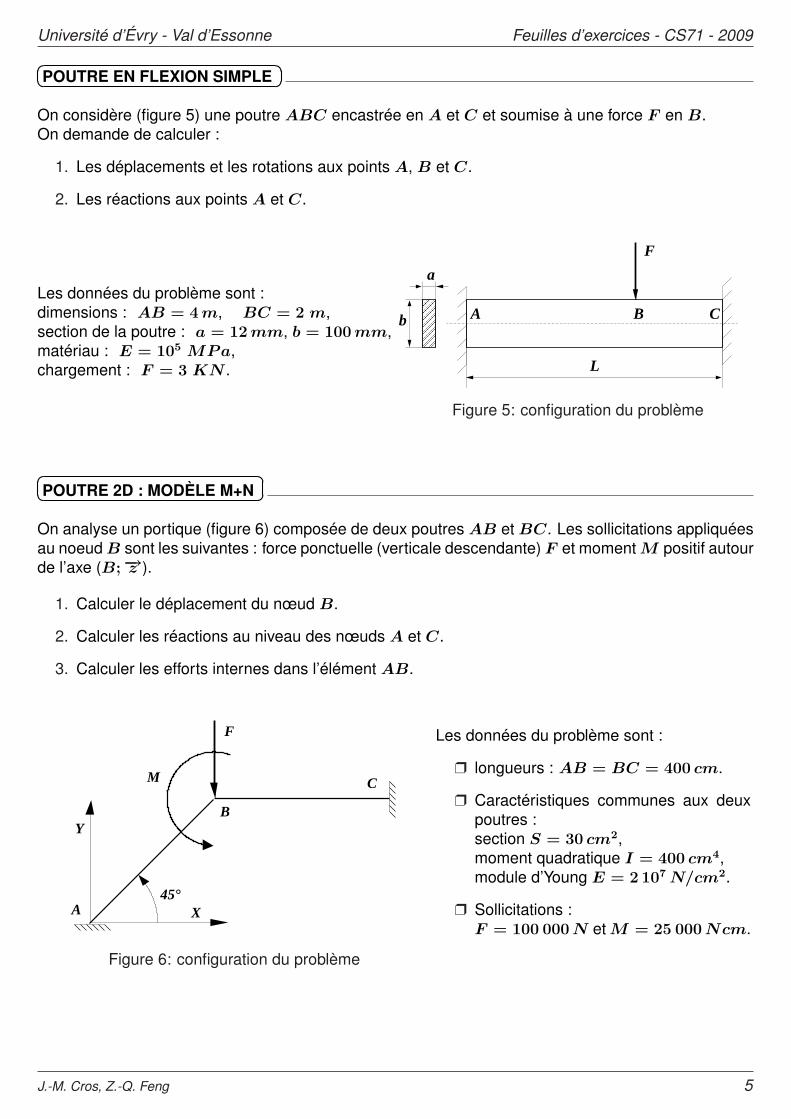
¥¦POUTRE 2D : MODÈLE M+N
On analyse un portique (figure 6) composée de deux poutres AB et BC. Les sollicitations appliquéesau noeud B sont les suivantes : force ponctuelle (verticale descendante) F et moment M positif autourde l’axe (B; −→z ).
1. Calculer le déplacement du nœud B.
2. Calculer les réactions au niveau des nœuds A et C.
3. Calculer les efforts internes dans l’élément AB.
C
45°
F
X
Y
M
A
B
Figure 6: configuration du problème
Les données du problème sont :
r longueurs : AB = BC = 400 cm.
r Caractéristiques communes aux deuxpoutres :section S = 30 cm2,moment quadratique I = 400 cm4,module d’Young E = 2 107 N/cm2.
r Sollicitations :F = 100 000 N et M = 25 000 Ncm.
J.-M. Cros, Z.-Q. Feng 5
Université d’Évry - Val d’Essonne Feuilles d’exercices - CS71 - 2009
¨§
¥¦STRUCTURE MODÉLISÉE PAR DEUX TYPES D’ÉLÉMENTS FINIS
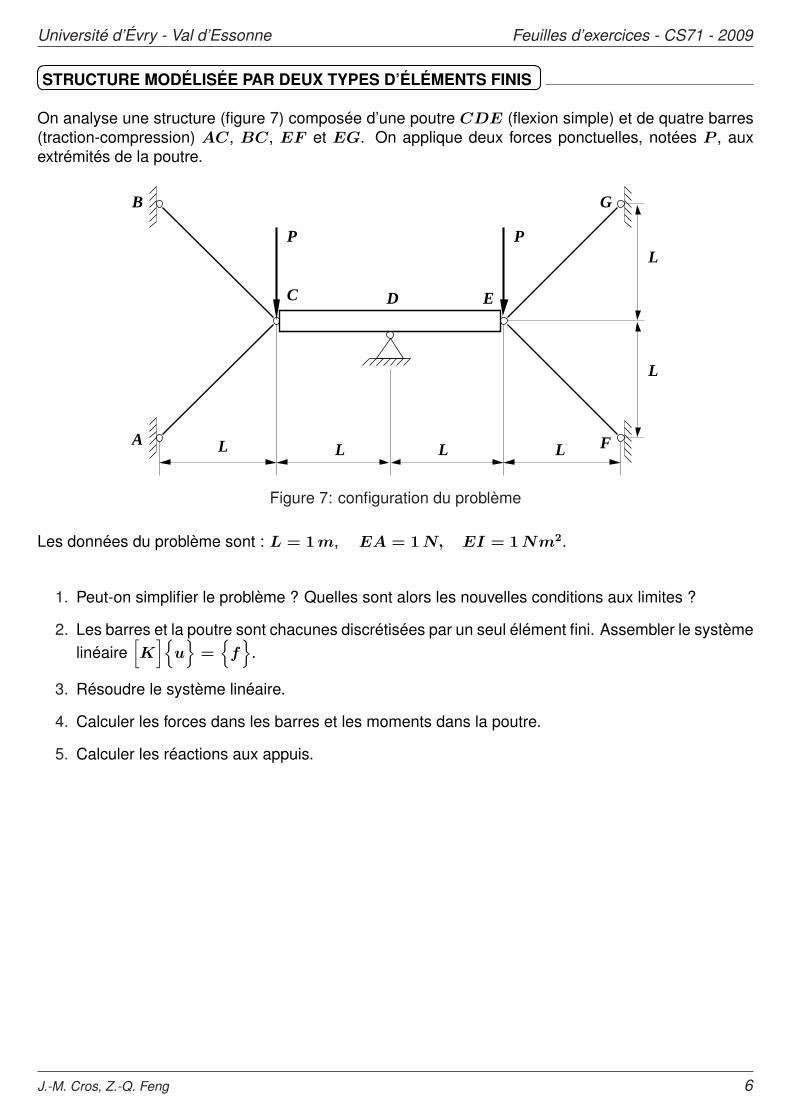
On analyse une structure (figure 7) composée d’une poutre CDE (flexion simple) et de quatre barres(traction-compression) AC, BC, EF et EG. On applique deux forces ponctuelles, notées P , auxextrémités de la poutre.
L L L L
L
L
B
P P
EC D
F
G
A
Figure 7: configuration du problème
Les données du problème sont : L = 1 m, EA = 1 N, EI = 1 Nm2.
1. Peut-on simplifier le problème ? Quelles sont alors les nouvelles conditions aux limites ?
2. Les barres et la poutre sont chacunes discrétisées par un seul élément fini. Assembler le systèmelinéaire
[K
]u
=
f
.
3. Résoudre le système linéaire.
4. Calculer les forces dans les barres et les moments dans la poutre.
5. Calculer les réactions aux appuis.
J.-M. Cros, Z.-Q. Feng 6

Université d’Évry - Val d’Essonne Feuilles d’exercices - CS71 - 2009
¨§
¥¦Exercice 1 (examen 2008) : environ 1h20 minutes
On considère l’étude d’une digue devant résister à la marée haute. Cette digue est placée entre deuxparois rocheuses. La modélisation conduit à un problème 2D, l’eau est représentée, en premièreapproximation, par une pression constante (notée P ) et la base de la digue est considérée commeencastrée. Le poids propre de la digue sera pris en compte. La digue est discrétisée avec UNSEUL élément fini à trois nœuds.
- Coordonnées des nœuds (en mètres) : 1 (0; 0), 2 (1; 0), 3 (0; 2).- Matériau :
module de Young E = 105 MPa, coefficient de Poisson ν = 0, 25,masse volumique ρ = 3000 kg/m3.
- Accélération du champ de pesanteur g = 10 m/s2.- Chargement (module) : ||P || = 100 MPa.
X
1
3
Y
2
modélisationdigue
P
1. Préciser le type d’analyse 2D en élasticité plane : Contraintes Planes ou Déformations Planes ?
2. Faire le bilan des actions extérieures et donner l’expression du vecteur des chargements nodaux.
3. Montrer que la matrice D peut s’écrire comme suit : [D] = 4 1010
3 1 01 3 00 0 1
.
4. Calculer la matrice de rigidité globale du problème (calculer d’abord [D][B] qui sera utile dans lasuite).
5. Former le système linéaire à résoudre en faisant apparaître, la matrice de rigidité, les réactionsinconnues et le vecteur des chargements extérieurs.
6. Calculer les déplacements nodaux et montrer alors U3 = 10−2 m = 0, 01 m et V3 =−10−6
3m .
7. Calculer les réactions. Comment vérifier rapidement que l’on a pas commis d’erreur ?Effectuer cette vérification pour ce problème.
8. Calculer les contraintes dans l’élément : σxx, σyy, σxy et σzz.(attention, ne pas oublier le type d’analyse 2D utilisé, cf. question 1).
9. Calculer la contrainte équivalente de von Mises.
10. Vérifier la tenue de cette structure en comparant la contrainte équivalente de von Mises avec lalimite élastique du matériau (σe = 400 MPa). Conclure.
J.-M. Cros, Z.-Q. Feng 7


![{[Na1(μ-H 2 O)Na2] 2 [(C 2 O 4 ) 2 Cr(μ-OH) 2 Cr(C 2 O 4 ) 2 ]·H 2 O} n , a novel hydrated form](https://img.pdfslide.net/doc/110x75/6358c81d3cd558f04e057abd/na1m-h-2-ona2-2-c-2-o-4-2-crm-oh-2-crc-2-o-4-2-h-2-o-n-a-novel.jpg)






![2-[2-(1,3-Dioxoisoindolin-2-yl)acetamido]acetic acid](https://img.pdfslide.net/doc/110x75/63239cbb03238a9ff60a82a2/2-2-13-dioxoisoindolin-2-ylacetamidoacetic-acid.jpg)








![Nitrogen heteroaromatic cations by [2+2+2] cycloaddition](https://img.pdfslide.net/doc/110x75/6343e41d30acffa12000697f/nitrogen-heteroaromatic-cations-by-222-cycloaddition.jpg)




![2-[2-(2-Pyridyl)ethyl]isoindolinium perchlorate](https://img.pdfslide.net/doc/110x75/6352bf780f35c933db00cfcb/2-2-2-pyridylethylisoindolinium-perchlorate.jpg)





