Embed Size (px)
Citation preview

CLEI 2011
Estimacion robusta de distancias mediante un
puntero laser y una camara web
Christian E. Portugal-Zambrano 1
Sociedad Peruana de ComputacionCatedra Concytec en Tecnologıas de la Informacion
Universidad Nacional de San Agustın – Arequipa, Peru
Jesus P. Mena-Chalco 2
Instituto de Matematica e EstatısticaUniversidade de Sao Paulo – Sao Paulo, Brasil
Resumen
En la actualidad existe un gran interes en el estudio de reconstrucciones tridimensionales a partirde imagenes digitales. La aplicacion de algoritmos fotogrametricos ha permitido mejoras relevantesen procesos de calibracion de camara, movimiento de objetos en escenas, recuperacion de formasa partir de sombras y profundidad en imagenes. El proceso de obtencion de distancia a partirde imagenes estaticas es muy importante para la determinacion de medidas de profundidad encualquier proceso de reconstruccion tridimensional de escenas. En este trabajo, se describe unaadaptacion de un prototipo de escaner elaborado en base a una camara web y un puntero laser debaja precision, aplicado a la determinacion robusta de distancias absolutas en imagenes obtenidasde secuencias de vıdeo en tiempo real. Se han realizado pruebas experimentales que demuestranla efectividad del calculo de distancias en tiempo real a traves de un simple modelo geometricoy un sistema de regresion lineal. Para un conjunto amplio de pruebas, realizadas con distintosparametros de escaner, se han obtenido buenos resultados de estimacion de distancias.
Palabras clave: fotogrametrıa, calibracion de camara, vision computacional, estimacion dedistancias.
1. Introduccion
La vista es uno de los principales sentidos usados por el hombre para mo-verse en el mundo. La cantidad de informacion que se recibe a traves de la
1 Email:[email protected] Email:[email protected]

Portugal Z. - Mena Ch.
vision es incomparable con la de los demas sentidos, pero gran cantidad deinformacion ha logrado ser procesada gracias a los avances en el campo dela Vision por Computador. El proposito de la vision artificial (en el ambitode vision por computador) es programar un computador para que entiendalas caracterısticas de una imagen o construya una descripcion de la escena deuna imagen [28]. Para conseguir una descripcion de una escena, la vision porcomputador brinda tecnicas como reconocimiento de patrones, aprendizaje es-tadıstico, geometrıa proyectiva, procesamiento de imagenes, teorıa de graficos,entre otros. Una tecnica que esta tomando mas adeptos en el area de VisionComputacional, hoy en dıa, es la obtencion del rango en imagenes, la cual esdefinida como la distancia existente entre el objeto en la escena y el sensor decaptura de imagenes [8,10,11,13]. Este tipo de tecnica permite obtener infor-macion tridimensional de la escena como fondo, forma, y profundidad de losobjetos presentes. Muchas aplicaciones han sido creadas considerando infor-macion de profundidad, como por ejemplo deteccion de colisiones en robotsautonomos [2,10], aplicaciones en Ingenierıa Inversa usando sensores opticosde rango [15] y elaboracion de mapas de navegacion. Tambien fueron creadasaplicaciones en areas como control de calidad y planeamiento de almacena-je, este ultimo es de gran importancia para empresas que necesitan obtenermedidas de objetos tridimensionales para su manipulacion [8].
El presente trabajo, esta orientado hacia la estimacion robusta de dis-tancias absolutas, trabajo tratado en [6,7,8,21,24], en el cual se considerandispositivos de facil y economica adquisicion como el de una camara web deuso domestico y un puntero laser de bajo costo, utilizados para una estimacionrapida de distancias obtenidas del mundo real. Para el diseno del escaner, fuedispuesto tanto la camara web, como el puntero laser en formacion paralelapara la simplificacion de calculos de proyeccion. La principal ventaja de estaconfiguracion (denomınese escaner) es la utilizacion de componentes de bajorecurso economico y el bajo costo de complejidad computacional. Adicional-mente, fue realizado un estudio e implementacion de una tecnica de calibra-cion de camara como mejora al correcto computo de distancias. Como partecomplementaria, para este trabajo fue realizado la evaluacion de la robustezen estimacion de distancias en tiempo real. Este trabajo ha sido motivadoen parte por la necesidad de brindar una tecnica manual que satisfaga lasnecesidades de los investigadores en vision computacional y deseen construirsistemas de imagenes tridimensionales que cumplan las necesidades de susaplicaciones. En la actualidad estan emergiendo una variedad de aplicacionesque se fundamentan en la rapidez, eficiencia y bajo costo [14].
El presente artıculo esta organizado de la siguiente manera: en la Seccion 2estan descritos brevemente los trabajos previos relacionados a estimacion dedistancias. En la Seccion 3 se presenta el procedimiento usado para la ca-libracion de la camara. El escaner considerado y la geometrıa del modelo
2
Portugal Z. - Mena Ch.
estan detallados en la Seccion 4. Finalmente, la implementacion, analisis yconclusiones obtenidos de los resultados se describen en las Secciones 5 y 6,respectivamente.
2. Trabajos Previos
Hasta ahora en la literatura se han tratado diversos trabajos relacionadoscon la estimacion de distancias usando dispositivos tales como una camaraweb y un puntero laser. A seguir describimos brevemente los trabajos previosmas representativos relacionados con el tema:
Calibracion de camara en corto alcance (1971) [4]. En este trabajo se esta-blece la importancia de la estimacion de distancias cercanas fotogrametricaspara la obtencion de medidas de estructuras, esto dio origen a tecnicas fo-togrametricas mas refinadas las cuales fueron aplicadas a la obtencion demedidas de antenas parabolicas.
Adquisicion de distancias 3D a traves de la absorcion diferencial de la luz(2002) [18]. Este trabajo relata la obtencion de informacion tridimensionalde objetos que han sido inmersos en un lıquido coloreado y a su vez fueronirradiados por una fuente de luz circular, la intensidad es una funcion derango con la adicion de otros parametros como la orientacion de la superficie,la posicion de las fuentes de luz, las caracterısticas espectrales del lıquido yla posicion del observador.
Un telemetro de bajo costo basado en ultrasonido (2002) [13]. En este trabajose presenta un metodo de bajo costo para la estimacion de rango basado enacustica el cual provee alta velocidad y precision. El metodo esta basado enel tiempo de demora de la senal recibida con respecto a la senal transmitidacausada por distancia entre el receptor y el transmisor.
Un sensor con capacidad sensitiva y selectiva de luz para la estimacion ro-busta de distancias (2004) [22]. En el trabajo desarrollado por Oike se pre-senta un array de sensores de 120x110 pıxeles que puede detectar la posicionde una luz de baja intensidad proyectada en una superficie no uniforme paraun sistema de telemetrıa. En este trabajo, los autores han logrado recons-truir tridimensionalmente un objeto utilizando un barrido de escaner.
Un metodo proyectivo para el calculo de dimensiones de cajas en tiempo real(2006) [8]. Este trabajo describe un metodo preciso para la computacion dedimensiones de cajas en tiempo real, utilizando un enfoque de geometrıaproyectiva la cual usa informacion de las siluetas de la caja y de la pro-yeccion de dos punteros laser sobre una de las caras de la caja, lograndoası obtener sus dimensiones en tiempo real. La efectividad de este trabajofue demostrada por medio de un prototipo de escaner que implemento sumetodo.
3

Portugal Z. - Mena Ch.
Autocalibracion extrınseca de una camara para la estimacion de distancia deescenas naturales (2007) [27]. En este trabajo se describe un nuevo enfoquede calibracion extrınseca de una camara con un escaner de obtencion dedistancia, para ello utiliza puntos de correspondencia seleccionados por unusuario a partir de una escena obtenida por dos sensores, luego de haberdado los puntos de correspondencia la calibracion extrınseca es realizadacon un algoritmo lineal seguido por un proceso de refinamiento no lineal.
Estimacion de distancias con un laser de lınea y una camara (2007) [21].En este trabajo se describe un sistema de escaner-laser, compuesto por unacamara y un puntero laser, el cual proyecta una linea horizontal que rastreatodo el objeto y determina si un obstaculo esta lejos o cerca del escaner, laidea general era poder estimar la distancia al objeto en base a la diferenciade ubicacion del reflejo del puntero laser en la imagen. En este trabajo sedescribio el efecto de que, a menor distancia el reflejo del laser se aproximaa la parte inferior de la imagen y a mayor distancia se acerca al centro dela imagen.
Telemetro webcam (2007) [6]. En el trabajo de T. Danko se explica la ne-cesidad de disenar dispositivos ligeros en peso, debido a que en algunasaplicaciones, como la robotica aerea, el peso es un tema muy importante.Este trabajo describe como se puede configurar un laser de baja precisioncon una camara web de bajo costo con la finalidad de proveer una maquinade vision con informacion de rango.
Existen varios aspectos a tener en cuenta a la hora de comparar los resul-tados obtenidos por una u otra tecnica, siendo la precision de los resultados lamas importante. En ese sentido, fue adoptado la calibracion de camara pro-puesta por Abdel-Aziz y Karara [1] quienes fueron los pioneros en desarrollarla Transformacion Lineal Directa (Direct Linear Transformation, DLT). Mastarde Karara, en 1979, mejoro el metodo para tener en cuenta las distorsio-nes opticas. La simplicidad del modelo y los buenos resultados obtenidos hanhecho que se extienda el uso de esta tecnica en la comunidad cientıfica.
En este trabajo, tomando los avances de [8], se modifico la tecnica deobtencion de distancia en base a la idea propuesta por [6,21]. Considerandoestas dos propuestas, junto con un proceso previo de calibracion de la cama-ra, se elaboro un esquema de obtencion de distancia que brinda informaciontridimensional (profundidad) en tiempo real 3 .
3 La version previa, que sirvio de base para este trabajo, fue presentada en el II Concurso deTrabajos de Tesis de pregrado en Computacion Grafica y Procesamiento de Imagenes [24].
4

Portugal Z. - Mena Ch.
3. Calibracion de camara y correccion de imagenes
La calibracion de camaras ha sido siempre un componente de medida fo-togrametrico, utilizado especialmente en la obtencion de rangos con alta pre-cision [25]. Con el objetivo de extraer informacion metrica 3D confiable delas imagenes, como paso previo a una reconstruccion tridimensional de movi-miento y recuperacion de forma [23], comunmente es necesaria la realizacionde un procedimiento de orientacion y de calibracion precisa de camara [3],
Para nuestro proposito, el concepto de calibracion de camara se entiendecomo la existencia de una relacion directa entre las coordenadas de la imageny coordenadas del objeto relativas al centro de la camara, pero sin embargola posicion de la camara en el espacio no es necesariamente conocida.
Mucho trabajo se ha realizado en el calibrado de camaras, algunos au-tores propusieron el uso de algoritmos geneticos [16,26] y tambien en el prey post procesamiento de los datos. Desde un punto de vista practico, algu-nos autores sugieren el metodo basado en una plantilla bidimensional comoel mas facil de realizar [5] y que obtiene buenos resultados. La orientacion dela camara incluye la determinacion de los parametros de ubicacion externospara definir su estado y su eje en un sistema de coordenadas de alto orden,generalmente llamado Sistema de coordenadas del mundo. Para ello utilizamosla deteccion de tres parametros traslacionales y tres parametros rotacionalespor cada camara 4 . Vea en [24] una descripcion del proceso de calibracion decamara utilizado. Para la implementacion de nuestra propuesta se ha usadoOpenCV [9] y se han validado los resultados de calibracion con la herramientaCamera Calibration Toolbox [3].
Figura 1. Modelo de escaner utilizado en este trabajo (basado en el modelo propuesto en [6]). Veaen [24] una implementacion y validacion del modelo propuesto en [6].
4 En nuestro sistema estamos considerando el uso de una sola camara web de uso domestico.
5

Portugal Z. - Mena Ch.
Figura 2. Esquema de disposicion camara-laser. La distancia D es obtenida en base la proyeccionde puntero laser sobre la superfıcie (figura adaptada de [6]).
4. Estimacion de distancia
En esta seccion se detalla el escaner utilizado para la obtencion de distanciahacia un objeto de superficie plana. En la Figura 1 se muestra la disposicion dela camara web y puntero laser. Esta configuracion mantiene ambos objetos enforma paralela, permitiendo ası el rapido calculo de distancias reales a partirde un simple modelo.
Geometrıa del modelo
Observe en la Figura 2 un esquema utilizado para el calculo de distancias.La distancia entre la camara web y el puntero laser es definida por H (medidaen cm), la distancia entre el escaner y el objeto de superficie plana es definidapor D (tambien en cm). Observese tambien que, la representacion de la escenaen la imagen formada por el lente de la camara web es de tamano A′B′ , siendoque AB representa la misma escena en tamano real. Por otro lado, la distanciadesde el centro de la imagen hasta la posicion del reflejo del puntero laseren la imagen puede ser definida como pfc (pixels from center), siendo que θrepresenta el angulo de vision (en radianes) formado por la recta de proyecciondel reflejo del puntero laser en la imagen y el eje de la camara.
Con este esquema podemos establecer la siguiente relacion:
D =H
tan θ(1)
Debemos considerar que, de la relacion planteada se puede obtener el totalde pıxeles por grado de luz entrante, aquı denominado rpc (radian per pixelpitch), logrando ası convertir cada pıxel en la imagen a su correspondiente
6

Portugal Z. - Mena Ch.
valor en centımetros. La siguiente ecuacion muestra rpc en relacion con θ:
θ = pfc ∗ rpc (2)
Debido a la existencia de posibles deformaciones de la lente en la camara web,en la Ecuacion 2 se debe de considerar tambien un parametro de permita lacorreccion de alineacion, aquı denominado ro (radian offset):
θ = pfc ∗ rpc+ ro (3)
Para obtener los valores de rpc y ro utilizamos un modelo de ajuste linealpara hallar la relacion entre una variable dependiente Y con k variables expli-cativas xk, los cuales generen un hiperplano de parametros β. Generalmenteeste modelo lineal es definido como:
Y =∑
βkXk + ε (4)
donde ε es la perturbacion aleatoria que recoge todos aquellos factores dela realidad no controlables y/o observables. Para este calculo aplicamos unmodelo de regresion lineal por lo que solo se cuenta con dos parametros: θ esconsiderada la variable dependiente y pfc la variable independiente. El modeloa resolver cumple la siguiente ecuacion general:
Y = mX + b (5)
con
m =n∑xy −
∑x∑y
n∑x2 − (
∑x)2
, b =
∑y −m
∑x
n,
donde n, es el total de muestras utilizadas; m, es la pendiente de la rectade regresion (en nuestro modelo representa al valor de rpc); b, es el valororiginado por factores no controlados (representa a ro) y Y representa a θ(para hallar m y b se utilizan los valores de θ y pfc reales)
Para obtener la distancia hacia el objetivo, se introduce la Ecuacion 3 enla Ecuacion 1, tomando como unidad de medida cm:
D =H
tan(pfc ∗ rpc+ ro)(6)
Denominamos a esta ultima formulacion como la Ecuacion de estimacion dedistancia. En la Figura 3 se presenta un resumen del esquema del flujo de datosdel sistema. Debemos de notar que, para lograr estimar distancias primero sedebe de calibrar el escaner apenas una unica vez (con una camara calibrada ono). Notese tambien que, en el proceso de calibracion del escaner son obtenidoslos valores correspondiente a rpc y ro.
7

Portugal Z. - Mena Ch.
Cálculo de distancia
Detección del punto láser en
la imagen
Calibración de cámara
Calibración por
homografías
Obtención de los parámetros de corrección
Secuencia deimágenes
en tiempo real (frames),Distancia
Cámara-Láser (H) y conjunto de
Distancias reales Escáner-Objeto (D)
Cálculo del modelo de
regresión lineal
Distancia Escáner-Objeto
Cálculo del ángulo de visión (θ)
para cadadistancia (D)
Nueva secuencia de Imágenes en tiempo real
(frames)
Corrección de imagen
Calibración de la distancia
Cálculo de pfc para cada imagen
Calibración del escáner
Estimación de la distancia
Imagen Corregida
Parámetros internosde la cámara
Patrones ChessBoard
Esquina de lospatrones
Parámetros calibradosde la ecuación de distancia
Conjunto de datos a aplicar al modelo de regresión
Valor pfc para cada imagen de consulta
Figura 3. Diagrama esquematico de flujo de datos del sistema creado. Cada bloque representa unmodulo mientras que cada flecha representa el flujo de datos entre cada modulo.
Deteccion del punto laser en la imagen
Definimos punto laser como el reflejo de la luz emitida por el puntero laseren un objeto y capturado en una imagen por la camara web. Para nuestrotrabajo, se ha utilizado un laser que emite luz roja y su deteccion en la imagenes considerada como una forma de introducir profundidad en la imagen. Elproceso de deteccion se ve influenciado por (i) la presencia de iluminacion en elambiente de trabajo; (ii) la textura del objeto apuntado con el laser, ası comosu color y (iii) el tamano del reflejo del puntero laser en la imagen (varıa enfuncion de la proximidad del escaner hacia el objeto, a mayor distancia, menortamano).
En trabajos previos, como en [8], se ha utilizado dos punteros laser clase IIcon una longitud de onda de 650nm para realizar una proyeccion. En [21], J.Y. Montiel y colaboradores, utilizaron un laser de linea clase II de 633-670nmcon la finalidad de obtener distancias a objetos aplicando barrido de linea.Para nuestro trabajo se ha utilizado una modificacion de un puntero laserClase II de color rojo con 630-650nm de longitud de onda.
En [6,24] la deteccion de la posicion del reflejo del punto laser fue hechaa partir del color rojo en los canales RGB, este procedimiento se ve afectado
8

Portugal Z. - Mena Ch.
con la presencia de objetos del mismo color ası como tambien la presencia dealta incidencia de luz. Una solucion eficiente fue propuesta en [8], donde setrato la utilizacion de informacion de luminancia en la imagen considerandoel formato de canales Y’CbCr. En [24] se observo que el reflejo del punto laseren la imagen muestra un desplazamiento vertical en relacion con la distanciaescaner-objeto, a mayor distancia la ubicacion del punto laser se aproxima ala mitad de la imagen y a menor distancia se aproxima a la parte inferior dela imagen. Dada esta caracterıstica, la deteccion del punto laser en la imagen(en su representacion Y’CbCr) puede ser realizada apenas para una sub-regionde la imagen que esta localizada en la mitad inferior de la imagen, evitandoası busquedas innecesarias del punto laser en la totalidad de la imagen.
5. Pruebas y analisis de la propuesta
El diseno del sistema fue implementado con software libre usando EclipseGalileo como IDE, Mingw como compilador en sistemas Windows y GCC4en sistemas Linux, Qt4 [20] para el diseno de la interface y la librerıaOpenCV2.1 [9] para el procesamiento de imagenes y vıdeo. Las pruebas fue-ron desarrolladas en un computador portatil: AMD TurionX2x64 de 2.4Ghzcon 4Gb de RAM. La camara web usada tiene una resolucion de 1.3 hasta5.2M pıxeles a una tasa de 30fps, 48dbs de ruido y un rango focal de 30mm alinfinito. Vea en la Figura 4 dos capturas de pantalla de la interface de usuariocreada. Para obtener una medida de distancia se necesita el reflejo del punterolaser en la imagen, esto genera una distancia mınima cuando se ubica en laparte inferior central y una distancia maxima en la parte central de la imagen.El modelo del sistema ha sido probado considerando alternativamente unacamara calibrada y una camara no calibrada.
Han sido utilizadas distintas medidas de H (separacion entre camara web y
(a) (b)
Figura 4. Interface de usuario del sistema para el calculo de distancia. (a) Cuadro de dialogo parala entrada de datos. (b) Conjunto de datos utilizados para la calibracion de los parametros de laecuacion de distancia (Obtencion de rpc y ro).
9

Portugal Z. - Mena Ch.
Nro. H Resolucion CamaraCalibrada
Dist. Min. Dist. Max. Nro. muestras MAE
1 10 320x240 No 26 121 20 1.3308
2 10 320x240 Si 27 142 24 1.2867
3 20 320x240 No 52 192 29 1.1880
4 20 320x240 Si 53 198 30 0.9447
5 25 320x240 No 70 195 26 1.1656
6 25 320x240 Si 75 195 25 0.5633
7 25 352x288 No 73 193 25 0.5681
8 25 352x288 Si 73 193 25 0.5590
9 25 640x480 No 71 196 26 0.8122
10 25 640x480 Si 72 197 26 0.7510
Cuadro 1Conjunto de parametros utilizados para la realizacion de pruebas. Ejemplo: En el conjunto 7 seha utilizado una distancia H de 25cm a una resolucion de 352x288 utilizando una camara sin
calibrar, considerando 25 muestras, linealmente separadas por 5cm, para el modelo de regresion.La muestra va desde una distancia mınima de 73 hasta 193cm.
puntero laser), distintas resoluciones de imagen y distintas muestras de datosusadas en el modelo de regresion. Para la obtencion de muestras utilizadas enel modelo de regresion, perteneciente a la calibracion del escaner, se consideraun parametro de salto S que expresa la diferencia entre cada muestra obtenidadel mundo real.
En el Cuadro 1 se muestran los parametros utilizados para la realizacionde las pruebas. Todos las muestras, utilizadas en el modelo de regresion, fue-ron obtenidas considerando S = 5cm. Para cada una de las configuracionesutilizadas en el Cuadro 1 se ha calculado la diferencia entre la distancia realy la distancia obtenida por el escaner para cada muestra del conjunto (errorabsoluto de aproximacion) para luego obtener el promedio de error para cadaecuacion.
Un analisis al Cuadro 1 nos muestra que, cuando la medicion de distanciase realiza con una camara web calibrada, el error de aproximacion es menorcomparado al obtenido cuando se utiliza una camara web sin calibrar. Esto
Nro. S Dist. Min. Dist. Max. Nro. Datos MAE
1 5 68 353 58 4.3361
2 10 68 348 29 5.9259
3 20 68 328 14 5.0719
4 40 68 308 7 5.2168
5 50 68 318 6 5.3089
Cuadro 2Conjuntos de muestras de regresion variables obtenidos con distintos valores de S. Fue utilizada
una camara web no calibrada y con resolucion de 320x240.
10

Portugal Z. - Mena Ch.
0 5 10 15 20 25 30 35 40 45 50 55 6050
100
150
200
250
300
350
400
Muestra
Dis
tanc
ia (
cm)
Dist. Real
Dist. Obtenida
0 5 10 15 20 25 30 35 40 45 50 55 6050
100
150
200
250
300
350
400
Muestra
Dis
tanc
ia (
cm)
Dist. Real
Dist. Obtenida
S = 5 S = 10
0 5 10 15 20 25 30 35 40 45 50 55 6050
100
150
200
250
300
350
400
Muestra
Dis
tanc
ia (
cm)
Dist. Real
Dist. Obtenida
0 5 10 15 20 25 30 35 40 45 50 55 6050
100
150
200
250
300
350
400
Muestra
Dis
tanc
ia (
cm)
Dist. Real
Dist. Obtenida
S = 20 S = 40
0 5 10 15 20 25 30 35 40 45 50 55 6050
100
150
200
250
300
350
400
Muestra
Dis
tanc
ia (
cm)
Dist. Real
Dist. Obtenida
S = 50
Figura 5. Grafica de comparacion entre distancias reales y distancias obtenidas de las muestrasobtenidas para cada una de las configuraciones descritas en el cuadro 2.
es debido a la correccion de la imagen por medio de los parametros internosobtenidos en la calibracion de la camara. De esa forma, los valores de pfc co-rregidos (correctamente ubicados), permiten una mayor robustez en el calculode distancias.
Otro punto a considerar en la evaluacion de robustez de estimacion dedistancia es la cantidad de muestras usadas para el modelo de regresion. Lacantidad de muestras depende del valor del parametro de paso S (a menor va-lor de S mayor cantidad de datos y viceversa). Vea en el Cuadro 2 las pruebas
11
Portugal Z. - Mena Ch.
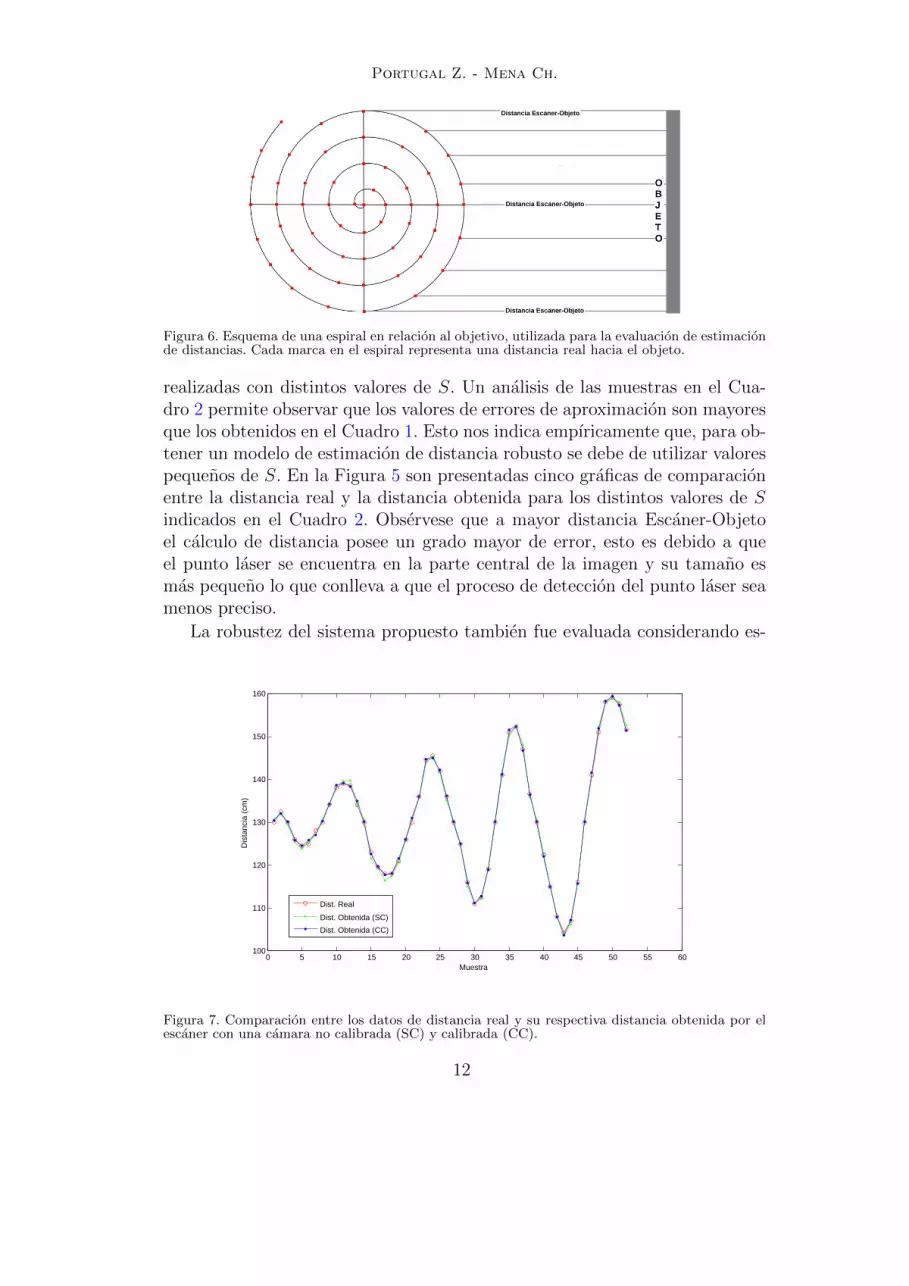
Figura 6. Esquema de una espiral en relacion al objetivo, utilizada para la evaluacion de estimacionde distancias. Cada marca en el espiral representa una distancia real hacia el objeto.
realizadas con distintos valores de S. Un analisis de las muestras en el Cua-dro 2 permite observar que los valores de errores de aproximacion son mayoresque los obtenidos en el Cuadro 1. Esto nos indica empıricamente que, para ob-tener un modelo de estimacion de distancia robusto se debe de utilizar valorespequenos de S. En la Figura 5 son presentadas cinco graficas de comparacionentre la distancia real y la distancia obtenida para los distintos valores de Sindicados en el Cuadro 2. Observese que a mayor distancia Escaner-Objetoel calculo de distancia posee un grado mayor de error, esto es debido a queel punto laser se encuentra en la parte central de la imagen y su tamano esmas pequeno lo que conlleva a que el proceso de deteccion del punto laser seamenos preciso.
La robustez del sistema propuesto tambien fue evaluada considerando es-
0 5 10 15 20 25 30 35 40 45 50 55 60100
110
120
130
140
150
160
Muestra
Dis
tanc
ia (
cm)
Dist. Real
Dist. Obtenida (SC)
Dist. Obtenida (CC)
Figura 7. Comparacion entre los datos de distancia real y su respectiva distancia obtenida por elescaner con una camara no calibrada (SC) y calibrada (CC).
12

Portugal Z. - Mena Ch.
timaciones de distancias siguiendo un movimiento en espiral. Para ello se ge-nero un modelo a escala y se definio valores reales de distancia aleatorios alo largo de la misma. En la Figura 6 se puede observar un esquema de lapreparacion del espiral y su relacion con el objetivo. Para la calibracion delescaner se ha utilizado los parametros descritos en la fila Nro. 1 mostradosen el Cuadro 2. Seguidamente, se procedio a ubicar el escaner en cada marcaindicada con un punto rojo en el espiral, obteniendo su correspondiente me-dida de distancia. Este conjunto de distancias obtenidas en cada marca delespiral se comparo con sus valores reales. En la Figura 7 se muestra todas lasestimaciones de distancias, comparadas con su valor real. El error promediode aproximacion (MAE) fue de 0,5392cm y MAPE de 0,82 %con una camarano calibrada y presenta un MAE de 0,4295cm y MAPE de 0,53 % con unacamara calibrada.
Figura 8. Esquema de una escena en donde el escaner se ubica en un eje fijo y se obtienen distintasdistancias hacia varios objetivos.
Otra manera de comprobar la robustez del sistema fue realizando un ba-rrido a una escena como la descrita en la Figura 8, en donde se selecciono unaserie de distancias aleatorias a objetos a partir de un eje fijo. Cada linea re-presenta una medida de distancia hacia un objetivo y para cada una de ellasse obtuvo una distancia por medio del escaner. Notese que, la estimacion dedistancia se realiza para un punto determinado en el objeto sin considerarla posicion de este respecto al escaner. Los resultados comparativos entre lasdistancias reales y las distancias obtenidas por el escaner con una camara webcalibrada y no calibrada son mostrados en la Figura 9.
De esta ultima prueba podemos observar el alto grado de aproximacionde las distancias obtenidas por el escaner. El error promedio de aproximacion(MAE) fue de 0,8613cm y MAPE de 0,824 % para una camara no calibrada ypresenta un MAE de 0,6492cm y MAPE de 0,557 % con una camara calibrada.
13

Portugal Z. - Mena Ch.
0 2 4 6 8 10 12 14 16 18 2060
80
100
120
140
160
180
Nro Muestra
Dis
tanc
ia (
cm)
Dist. Real
Dist. Obt. (SC)
Dist. Obt. (CC)
Figura 9. Comparacion entre los datos de distancia real y su respectiva distancia obtenida por elescaner para los datos obtenidos del esquema mostrado en la Figura 8.
Limitaciones
Si bien los resultados son prometedores y el tiempo de calculo es casi ins-tantaneo (milisegundos) el sistema presenta ciertas limitaciones:
La ubicacion del punto laser en la imagen genera una distancia mınima(punto laser en la parte infe rior central de la imagen) y una distanciamaxima (parte central de la imagen) esto es proporcional a H (distanciacamara-laser) por lo que para variar el rango de distancia a utilizar se debede modificar la distancia H en el escaner. Note que la disposicion actual delescaner disenado permite contornar esta limitacion.
El sistema ha sido probado con objetos de superficie plana, lisa y opaca.Creemos que existira una degradacion en la exactitud de estimacion cuandosean consideradas superficies rugosas no-planas, dado que la proyeccion delpuntero laser sobre estas superficies es afectada.
6. Conclusiones y Trabajos Futuros
Se ha comprobado la funcionalidad y efectividad del escaner implemen-tando el modelo matematico y el software necesario para su uso, a diferenciacon nuestro trabajo previo realizado en [24], en este trabajo se ha mejoradoel diseno del escaner y se ha probado el mismo con distintas configuracionesen sus parametros. Se ha probado que se puede adaptar la configuracion delescaner para considerar distancias mas grandes. La deteccion del punto laseren la imagen es un paso importante para el proceso de estimacion de distancia,en este trabajo se ha utilizado un formato de colores Y’CbCr, a diferencia delformato RGB utilizado en [24], y se ha probado que este formato permite unadeteccion del punto laser mas precisa en ambientes menos controlados utiliza-dos en el trabajo anterior, logrando ası que este paso sea mejorado. Creemos
14
Portugal Z. - Mena Ch.
que la utilizacion de una camara web con infrarojo aumentarıa la vision eidentificacion del punto laser.
Si bien el proceso de calibracion de camara no tiene una relacion directacon el proceso de estimacion de distancia, en este trabajo se ha probado queel aplicar un factor de correccion a la imagen en base a los parametros decalibracion de camara obtenidos, se obtiene una mejora en la estimacion dedistancia disminuyendo el grado de error en las medidas obtenidas. Aquı elproceso de calibracion de camara se realizo en base a homografıas, obteniendorelaciones lineales. En los proximos pasos, realizaremos un estudio mayor detecnicas de calibracion [16,25,26] procurando buscar mayor eficiencia en esteproceso. Adicionalmente, pueden ser considerados los trabajos [17,19] con laintencion de elaborar un modelo de telemetro autocalibrado aplicado sobre elmodelo aquı desarrollado.
Es importante destacar que, el proceso de calibracion de camara y elde estimacion de distancia, ofrecen en conjunto, informacion necesaria yefectiva para un trabajo posterior de reconstruccion superficial de objetostridimensionales [8,12,15,23]. En particular se puede configurar un nuevomodelo de escaner usando adicionalmente un segundo puntero laser (dado queambos punteros esten separados una distancia ) y/o una segunda camara webque permita la reconstruccion de escenas en 3D, manteniendo informacionreal de altura y profundidad, i.e. obtencion de escenas 3D donde tambiense tenga informacion real de sus dimensiones y ademas creemos que estametodologıa puede ser usada en aplicaciones de robotica movil y amplia-mente usada en la estimacion de medidas reales de objetos en escenas digitales.
Agradecimientos. Este trabajo conto con el apoyo de la Catedra Concytec en TICs dela Universidad Nacional de San Agustın a quienes les agradecemos por el soporte en el laboratorioy equipos de computo, necesarios para el desarrollo e implementacion de los modelos presentadosen este trabajo, y al Consejo Nacional de Ciencia y Tecnologıa.
Referencias
[1] Y.I. Abdel-Aziz and H.M. Karara. Direct linear transformation from comparator coordinatesinto object space coordinates in close-range photogrammetry. Proceedings of the Symposiumon Close-Range Photogrammetry, 1:1–18, 1971.
[2] H. Baltzakis, A. A. Argyros, and P. Trahanias. Fusion of laser and visual data for robot motionplanning and collision avoidance. Machine Vision and Applications, 15(2):92–100, 2003.
[3] J. Y. Bouguet. Matlab camera calibration toolbox. In Technical Report, 2000.
[4] D.C. Brown. Close-range camera calibration. Photogrammetric Engineering, 37(8):855–866,1971.
[5] P. Campos D. Aracena and C. Tozzi. Comparacion de tecnicas de calibracion de camarasdigitales. Universidad de Tarapaca, 13(1):57–68, 2005.
[6] T. Danko. Webcam based DIY laser rangefinder.http://sites.google.com/site/todddanko/home/webcam laser ranger, 2007.
15

Portugal Z. - Mena Ch.
[7] A. Derhgawen. Obstacle detector using webcam and laser pointer.http://ashishrd.blogspot.com/2006/11/obstacle-detector-using-webcam-and.html, 2011.
[8] L. A. Frata Fernandes. Um metodo projetivo para calculo de dimensoes de caixas em temporeal. Master’s thesis, Universidade Federal Do Rio Grande Do Soul, 2006.
[9] B. Gary and K. Adrian. Learning OpenCV: Computer Vision with the OpenCV Library.O’Reilly, first edition, 2008.
[10] N. Gonzales. Sistema de vision por computadora para la medicion de distancia e inclinacionde obstaculos para robots moviles. Pontificia Universidad Javeriana: Facultad deIngenieria,9(2):125–134, 2005.
[11] Yann Goyat, Thierry Chateau, and Laurent Trassoudaine. Tracking of vehicle trajectory bycombining a camera and a laser rangefinder. Mach. Vis. Appl, 21(3):275–286, 2010.
[12] R.I. Hartley and A. Zisserman. Multiple View Geometry in computer Vision. CambridgeUniversity Press, second edition, 2004.
[13] H. Hua, Y. Wang, and D. Yan. A low-cost dynamic range-finding device based on amplitude-modulated continuous ultrasonic wave. Instrumentation and Measurement, IEEE Transactionson, 51(2):362–367, 2002.
[14] K.F. Hulme, E.M. Kasprzak, K.E. Lewis, D. Moore-Russo, P. Singla, and D.P. Fuglewicz.Game-based experiential learning in dynamics education using motion simulation. In TheInterservice/Industry Training, Simulation & Education Conference (I/ITSEC), volume 2010.NTSA, 2010.
[15] B. Jahne, H. HauBecker, and P. Geibler. HandBook of Computer Vision and Applications,volume third. Academic Press, first edition, 1999.
[16] Q. A. Ji and Y. M. Zhang. Camera calibration with genetic algorithms. IEEE Trans. Systems,Man and Cybernetics, 31(2):120–130, 2001.
[17] M. Kurisu, H. Muroi, and Y. Yokokohji. Calibration of laser range finder with a geneticalgorithm. pages 346–351. IEEE, 2007.
[18] D. Laurendeau, R. Houde, M. Samson, and D. Poussart. 3d range acquisition throughdifferential light absorption. Instrumentation and Measurement, IEEE Transactions on,41(5):622–628, 2002.
[19] D. D. Lichti. Self-calibration of a 3D range camera. In ISPRS Congress, page B5: 927 ff, 2008.
[20] D. Molkentin. The Book of Qt 4. No Starch Press, first edition, 2007.
[21] J.Y. Montiel, J.L. Lopez, and R. Hernandez. Estimacion de distancias con un laser de linea yuna camara. Cientıfica, 11(3):129–134, 2007.
[22] Y. Oike, M. Ikeda, and K. Asada. A 120x110 position sensor with the capability of sensitiveand selective light detection in wide dynamic range for robust active range finding. Solid-StateCircuits, IEEE Journal of, 39(1):246–251, 2004.
[23] N. Paragios, Y. Chen, and O. Faugeras. Handbook Of Mathematical Models In ComputerVision. Springer-Verlag, first edition, 2005.
[24] C. Portugal-Zambrano and J. P. Mena-Chalco. Estimacion de distancias absolutas utilizandoun puntero laser y una camara web. In II Concurso de trabajos de Pregrado en CGI - IIISimposio Peruano de Computacion Grafica y Procesamiento de Imagenes, SCGI-2009, Dec.28–29 2009.
[25] F. Remondino and C.S. Fraser. Digital camera calibration methods: Considerations andcomparisons. In IAPRS, editor, ISPRS Commission V Symposium Image Engineering andVision Metrology, volume 36, pages 266–272, 2006.
[26] G. G. SAVII. Camera calibration using compound genetic-simplex algorithm. Journal ofoptoelectronics and advanced materials, 6(4):1255–1261, 2004.
[27] D. Scaramuzza, A. Harati, and R. Siegwart. Extrinsic self calibration of a camera and a 3dlaser range finder from natural scenes. In Intelligent Robots and Systems, 2007. IROS 2007.IEEE/RSJ International Conference on, pages 4164–4169. IEEE, 2007.
[28] L. G. Shapiro and G. C. Stockman. Computer Vision. Prentice Hall, 2001.
16





















