Embed Size (px)
Citation preview

Mobility Estimation Based on an Autoregressive
Model
Zainab R. Zaidi and Brian L. MarkDept. of Electrical and Computer Engineering
George Mason University
January 9, 2004
Regular paper submission to:IEEE Transactions on Vehicular Technology
∗Corresponding Author: Brian L. Mark
Author Contact Information:
Zainab R. Zaidi Brian L. MarkECE Dept., MS 1G5 ECE Dept., MS 1G5George Mason University George Mason University4400 University Drive 4400 University DriveFairfax, VA 22030 Fairfax, VA 22030tel: 703-993-1602 tel: 703-993-4069fax: 703-993-1601 fax: 703-993-1601e-mail: [email protected] e-mail: [email protected]

1
Abstract
We propose an integrated scheme for estimating the mobility state and model parameters of a user based
on a first-order autoregressive model of mobility that accurately captures the characteristics of realistic
user movements in wireless networks. Estimation of the mobility parameters is performed by applying
the Yule-Walker equations to the training data. Estimation of the mobility state, which consists of the
position, velocity, and acceleration of the mobile station is accomplished via an extended Kalman filter
using measurements from the wireless network. The integration of mobility state and model parameter
estimation results in an efficient and accurate real-time mobility tracking scheme that can be applied in a
variety of wireless networking applications. The mobility estimation scheme can also be used to generate
realistic mobility patterns to drive computer simulations of mobile networks. We validate the proposed
mobility estimation scheme using mobile trajectories collected from drive-test data obtained from a live
cellular network.
Keywords
Mobility model, Geolocation, Autoregressive model, Kalman filter, Yule-Walker equations
I. Introduction
User mobility is a fundamental characteristic of wireless mobile networks that profoundly
impacts network performance. To perform optimally, a wireless network should be designed
to take into account the mobility of the user. In this regard, two issues of fundamental
importance are: 1) the development of suitable models of user mobility to drive realistic
simulation studies of wireless networks and 2) efficient real-time tracking of user mobility to
enable seamless connectivity and quality-of-service in a wireless network. The two issues are
closely interrelated, since accurate real-time tracking of user mobility must be based on a
suitable mobility model that can be used to anticipate the future mobility state of the user.
Conversely, in order to generate realistic mobility patterns for the purpose of simulating
a wireless network, actual mobile trajectories from live networks should be fit to a model
that can capture the salient characteristics of user mobility. Furthermore, accurate mobility
tracking requires that the parameters of the mobility model be matched as closely as possible
to the available data.

2
Some of the more prominent mobility models (cf. [1], [2]) that have been proposed in the
literature include random walk models [3], the random waypoint model [4], Brownian models
[5], Gauss-Markov models [6], and Markov chain models [7]. Such models have the important
feature of simplicity, making them amenable for use in simulation and in some cases analytical
modeling of wireless network behavior. However, some recent work has shown that many of
them do not accurately represent actual user trajectories in real wireless networks [2], [8],
[9], [10]. Consequently, such models may result in misleading characterizations of network
performance. Moreover, such models are not sufficiently rich to enable accurate and precise
real-time mobility tracking.
A linear system model of mobility has been applied to real-time mobility tracking via
Kalman filters [11], [12]. Yang and Wang [13] proposed a joint mobility tracking and hard
handoff initiation scheme based on a similar linear system model. In this model, the mobility
state consists of position, velocity, and acceleration, in contrast to geolocation schemes that
estimate only the position of the mobile. The advantage of maintaining information about
velocity and acceleration is that the underlying model can provide predictive information
about the future location of the mobile. Such predictive mobility information can be crucial
in providing seamless connectivity and quality-of-service by anticipating handoffs or changes
in the mobile environment ahead of time.
The linear system model is capable of capturing realistic user mobility patterns, but speci-
fication of an optimal set of model parameters is not straightforward in general. The general
form of the linear system model does not lend itself to efficient estimation of an optimal
set of model parameters from real mobility data. Typically, the parameters are specified
in an ad hoc manner. Mobility tracking schemes derived from the linear dynamic system
model are accurate as long as the model parameters match the mobility characteristics of the
user. However, the mobility schemes described in [11], [12], [13] cannot adapt to significant
changes in the model parameters over time. Thus, there is a need for a systematic method
for real-time estimation of the mobility model parameters.

3
Autoregressive models are a type of linear system model that have been used to model
mobility in wireless networks. Recognizing the need for more realistic mobility models, a
Gauss-Markov model was presented in [6] for use in conjunction with mobility management
for PCS networks. A similar autoregressive model was used in [14] to perform location
tracking. These models capture correlation effects in the velocity of the mobile, but do
not model the acceleration component of mobility. The Global Position System (GPS) uses
a variety of autoregressive-based models, including one called the PVA (position, velocity,
and acceleration) model that incorporates acceleration [15]. However, the issue of how to
select the appropriate model parameters to represent realistic mobility patterns has not been
treated for these models, nor in the available literature on mobility modeling for wireless
networks (cf. [1], [2]).
We present a real-time mobility estimation scheme based on a first-order autoregressive
model, referred to as the AR-1 model. The AR-1 model is sufficiently simple to enable
real-time mobility tracking, but general enough to accurately capture the characteristics of
realistic mobility patterns in wireless networks. The AR-1 model is a variation of the linear
system model and is more general than the autoregressive models proposed earlier in [14],
[6]. An important feature of the AR-1 model is that the parameters of the model can be
determined in an optimal way (i.e., in the sense of minimum mean squared error) via the
Yule-Walker equations. This is not possible with the linear system model of mobility used
in [11], [12], [13].
Our mobility estimation scheme integrates optimal parameter estimation via the Yule-
Walker equations with mobility state estimation using Kalman filtering. The mobility track-
ing schemes proposed earlier do not incorporate a method to estimate the model parameters
based on training data. In such tracking schemes, the model parameters are typically de-
termined in an ad hoc manner. An improper choice of the model parameters can result in
suboptimal mobility tracking. Moreover, mobility tracking without parameter estimation
can be especially problematic if the mobility characteristics change over time, necessitating
4
a change in the model parameters. The integrated mobility estimation scheme can adapt to
changes in the mobility characteristics over time, since the model parameters are continu-
ously re-estimated using new observation data.
The mobility estimation scheme can be used to obtain mobility parameters from real
mobility data that can subsequently be used to generate representative mobility patterns
from the AR-1 model for simulation purposes. We applied the mobility estimation scheme
to obtain AR-1 model parameters from mobility data taken from a wireless network. The
importance of the mobility model in simulations of network performance has been pointed
out by a number of authors [1], [2]. Nevertheless, the existing works related to mobility
modeling have not considered the problem of matching the model parameters to actual
mobility data. Our numerical results using drive test data show that the AR-1 model can
accurately model realistic mobility patterns. Without a systematic approach to parameter
estimation, the existing mobility models cannot make a similar claim.
The present paper shows how to simultaneously estimate both the mobility model param-
eters and the mobility state of a mobile user based on a first-order autoregressive model.
The work contributes to the inter-related issues of realistic mobility modeling and real-time
mobility tracking for wireless networks. The remainder of the paper is organized as follows.
Section II motivates the AR-1 mobility model and specifies the model in detail. We point out
the differences between the AR-1 model and other autoregressive-type mobility models that
have appeared in the literature. A procedure for estimating the AR-1 model parameters via
the Yule-Walker equations is developed in section III. The parameter estimation procedure
is one component of an integrated scheme for real-time mobility estimation. Section IV dis-
cusses the second component of mobility state estimation via Kalman filtering using various
types of signal measurements as observation data. Section V presents a detailed validation
of the AR-1 mobility model using drive test data collected from the field. Finally, section VI
concludes the paper.

5
II. AR-1 Mobility Model
In the AR-1 model, the mobile unit’s state at time n is defined by a (column) vector1
sn = [xn, xn, xn, yn, yn, yn]′, (1)
where xn and yn specify the position, xn and yn specify the velocity, and xn and yn specify
the acceleration of a mobile node in the x and y directions in a two-dimensional grid. If
mobility state information is needed in three dimensions, the sn vector can be augmented
by [zn, zn, zn]′, where the vector elements represent position, velocity, and acceleration in the
z-dimension.
The AR-1 model for the mobility state sn is given as follows:
sn+1 = Asn + wn, (2)
where A is a 6× 6 transformation matrix, the vector wn is a 6× 1 discrete-time zero mean,
white Gaussian process with autocorrelation function Rw(k) = δkQ, where δ0 = 1 and δk = 0
when k 6= 0. The matrix Q is the covariance matrix of wn.
Comparing the state equation (2) with that of the linear system model discussed in [11],
[12], the linear system model includes an extra term Bun, where B is 6 × 2 matrix and
un is a vector of two independent semi-Markov discrete command processes that drive the
acceleration of the model in the two-dimensional plane. In the linear system model of [11],
[12], the matrices A and B have special forms that depend only on the sampling interval T
and a parameter α. The command process un must be specified by a set of discrete command
levels, a transition probability matrix, and probability distributions for the durations in each
command level. An outstanding issue is how to specify an appropriate set of parameters for
the linear system model.
In the AR-1 model, the matrix A and the covariance matrix Q are completely general.
In our approach, the appropriate values for the matrix A and the covariance matrix Q can
1The notation ′ indicates the matrix transpose operator.

6
be estimated based on training data using the Yule-Walker equations (see section III). This
allows the model to accurately characterize a wide class of mobility patterns. Our numerical
results show that the AR-1 model can accurately represent realistic mobile trajectories (see
section V).
The AR-1 model is more general than the Gauss-Markov model proposed in [6], which
is a type of autoregressive model. In the Gauss-Markov model of [6], the mobility state
consists of position, velocity, and direction, but does not explicitly represent acceleration.
A key feature of the Gauss-Markov model with respect to simpler mobility models is that
correlation between velocity states is explicitly modeled via a gain parameter α. A similar
model was used in [14] as the basis for a location tracking scheme. The AR-1 model captures
not only correlation between velocity states, but correlation between acceleration states.
Since no explicit form is assumed for the A matrix, correlations among position, velocity,
and acceleration can also be captured. The AR-1 model differs from the models of [14], [6]
in that acceleration is explicitly modeled for the purpose of mobility prediction.
The AR-1 model defined by (2) can also provide predictive information. If the state
information or estimate sn at any given time n is available, it is possible to predict the
mobility state at any time n+m in the future. The optimal predicted state sn+m of a mobile
node in the minimum mean-squared error (MMSE) sense, given the state estimate at time
n, is
sn+m = E[sn+m|sn] = Amsn. (3)
The covariance matrix for the predicted mobility state at time n+m, denoted Mn+m = Cov[sn+m],
is given by
Mn+m = AmMnA′m + Σm−1l=0 Am−1−lQA′m−1−l, (4)
where Mn = Cov[sn].
The predicted mobility state can be used to provide a “handoff pre-trigger” incorporated
in IP mobility protocols discussed in [16], [17] to provide transparent network layer mobility

7
management. In ad hoc networks, mobility prediction can be used in predicting link avail-
ability in future to improve routing performance by selecting stable routes. Such anticipatory
resource allocation schemes are not possible with existing geolocation systems, which track
only the current location of the mobile.
According to Bettstetter’s nomenclature for mobility models [1], the AR-1 model may be
classified as a microscopic mobility model. A microscopic model describes the movement, i.e.,
position, velocity etc., of an individual vehicle or person as opposed to a model describing
group behavior such as the fluid flow model, group mobility model [18], family of gravity
models [19], map or activity based models [20], [21], etc. Such composite mobility models
use microscopic models as basic building blocks (cf. [2]).
III. Mobility Parameter Estimation
The AR-1 mobility model is completely specified by the transition matrix A and the
covariance matrix Q of the noise. Using the Yule-Walker equations [22], an estimate of A,
denoted A(n), where n specifies the amount of training data available, can be found from the
mobility state data s1, · · · , sn as follows:
A(n) = R(n)s (1)R(n)
s (0)−1, (5)
where
R(n)s (1) =
1
n− 2
n−1∑i=1
sis′i+1, R(n)
s (0) =1
n− 1
n∑i=1
sis′i. (6)
The estimator A(n) is a Minimum Mean Squared Error (MMSE) estimator and can be directly
derived from the orthogonality principle as given below:
E[(sn − A(n)sn−1)sn−1] = 0. (7)
The noise covariance matrix Q(n) is estimated using the residual estimation error, ei ,
si − A(i)si−1, as follows:
Q(n) =1
n− 1
n∑i=1
eie′i. (8)

8
��������
������ ���
��������
��� ����
�� ���
����� ��������
Fig. 1. Integrated mobility state and parameter estimator.
An extended Kalman filter, described in section IV-B, is used to generate the mobility
state estimates sn from the wireless measurements on, which also are discussed in section
IV-A, at time n. The state estimates sn are used to re-estimate the model parameters at
time n. The recursive model parameter estimator is given below.
Recursive parameter estimation (time n):
1. R(n)s (0) = 1
n−1
((n− 2)R
(n−1)s (0) + sns′n
)
2. R(n)s (1) = 1
n−2
((n− 3)R
(n−1)s (1) + sn−1s
′n
)
3. A(n) = R(n)s (1)R
(n)s (0)−1
4. en = sn − A(n)sn−1
5. Q(n) = 1n−1
((n− 2)Q(n−1) + ene′n
)
We have assumed that a sufficient amount of training data is available to initialize R(0)s (0)
and R(0)s (1). In our numerical experiments, we have found that a training block containing
only a few data points is sufficient to initialize the estimator.
IV. Mobility State Estimation
The integrated mobility estimator, as shown in Fig. 1, consists of a mobility state estimator
and a model parameter estimator as described in section III. In this section, we discuss
the estimation of mobility state from signal measurements typically available in wireless

9
networks, i.e., received signal strength indicators (RSSI) or time of arrival (TOA). Three
independent signal measurements of either kind can be applied as observations to an extended
Kalman filter in order to estimate the mobility state of a user.
A. Observation Data in Wireless Networks
To perform mobility state estimation, we assume that either RSSI or TOA measurements
from at least three base stations are available. We remark that the angle of arrival (AOA) of
the mobile’s signal at multiple base stations is often used for location tracking [23], [24], [25],
[26]. The AOA is typically estimated using antenna arrays at the base station. However,
AOA information is not suitable for use in conjunction with an extended Kalman filter, since
the AOA measurements are non-continuous functions of mobility state that are generally not
differentiable. Another measurement used to locate the mobile callers is the time difference
of arrival (TDOA) of the signals from two base stations [23], [27], [28], [29], [30]. However,
calculation of the TDOA requires time synchronization of the base stations. Moreover, when
three base stations are used to provide TDOA measurements, there is often more than one
solution and, as observed in [23], [31], there is no way to determine the correct solution
without the help of additional information, e.g., additional TOA measurements as suggested
by [31].
A.1 Pilot Signal Strengths (RSSI)
In a wireless cellular network, the distance between the mobile and a reachable base station
can be inferred from the RSSI or signal strength of the pilot signal from the base station.
Pilot signal strengths are more readily available in wireless networks than TOA, TDOA, and
AOA measurements, for which extra infrastructure is needed to collect useful data. The
RSSI, measured in dB, received at the mobile unit from the base station with coordinates
(ai, bi) at time n can be modeled as follows [32]:
pn,i = κi − 10γ log(dn,i) + ψn,i, (9)

10
where κi is a constant determined by the transmitted power, antenna height, wavelength,
and gain of the base station i, γ is a slope index (typically γ is between 2− 5), ψn,i is a zero
mean, stationary Gaussian process with standard deviation σψ typically from 4− 8 dB, and
dn,i is the distance between the mobile node and base station i:
dn,i =√
(xn − ai)2 + (yn − bi)2. (10)
Distance measurements to three independent base stations are sufficient to locate the
mobile unit in the two-dimensional plane. For mobility estimation based on RSSI informa-
tion, we construct an observation vector consisting of the three largest RSSI measurements,
denoted by pn,1, pn,2, pn,3, as follows:
on = (pn,1, pn,2, pn,3)′ = h1(sn) + ψn, (11)
where ψn = (ψn,1, ψn,2, ψn,3)′ and
h1(sn) = κ− 10γ log(dn), (12)
where κ = (κ1, κ2, κ3)′ and dn = (dn,1, dn,2, dn,3)
′. The covariance matrix of ψn is given by
Rψ = σ2ψI3.
A.2 Time of Arrival (TOA)
Time-based methods of geolocation using TOA and TDOA measurements rely on accurate
estimates of the time of arrival of the signals received at several base stations from the mobile
station or at the mobile station from several base stations [23], [27]. Several approaches have
been developed for estimation of these parameters from received signals such as code tracking
and acquisition in spread spectrum systems using delay-locked loop (DLL) or tau-dither loop
as described in [23]. In the presence of measurement noise, the time delay estimate of the
signal τn,i, from base station i measured at the mobile station, at time instant n using DLL
is given by
τn,i = dn,i/c + ηn,i, (13)

11
where dn,i is given in (10), c is the speed of light, and ηn,i is the zero mean measurement
noise with typical variance of ση = 1 µs [33].
As in the case of pilot signal strengths, three TOA measurements to neighboring base
stations are sufficient for mobility state estimation. The observation vector for TOA-based
mobility estimation consists of the three TOAs, denoted by τn,1, τn,2, τn,3, is given as follows:
on = (τn,1, τn,2, τn,3)′ = h2(sn) + ηn, (14)
where ηn = (ηn,1, ηn,2, ηn,3)′ and
h2(sn) = dn/c, (15)
where dn = (dn,1, dn,2, dn,3)′. The covariance matrix of the measurement noise η is denoted
by Rη = σ2ηI3.
B. Mobility State Estimation
The general observation or measurement equation in a wireless environment is written as
follows, generalizing (11) and (14):
on = h(sn) + ρn, (16)
where
h(sn) =
h1(sn), for RSSI,
h2(sn), for TOA.
and
ρn =
ψn, for RSSI,
ηn, for TOA.
To apply the extended Kalman filter for state estimation the observations are linearized
as follows:
on = h(s∗n) + Hn∆sn + ρn,

12
where s∗n is the nominal or reference vector and ∆sn = sn− s∗n is the difference between the
true and nominal state vectors. In the extended Kalman filter (cf. [15]), the nominal vector
is obtained from the estimated state trajectory sn, i.e., s∗n = sn. The matrix Hn is given by
Hn =∂h
∂s|s=sn (17)
The matrix Hn for each type of measurement is given in the Appendix.
The steps in the extended Kalman filter are given as follows (cf. [15]):
Initialization:
1. s0|−1 = E(s0)
2. M0|−1 = Cov(s0)
Recursive estimation (time n):
1. Hn = ∂h∂s|s=sn
2. Kn = Mn|n−1H′n(HnMn|n−1H
′n + Rρ)
−1
3. sn|n = sn|n−1 + Kn(on − h(sn|n−1)) [Correction step]
4. sn+1|n = Asn|n [Prediction step]
5. Mn|n = (I −KnHn)Mn|n−1(I −KnHn)′ −KnRρK′n
6. Mn+1|n = AMn|nA′ + Q
Here, Mi|j = Cov(si|j), i = n, j ∈ {n, n− 1}, Kn is the Kalman gain matrix and Rρ is either
Rψ or Rη depending on the type of measurements used to perform the estimation.
V. Numerical Results
A. Data Collection
An Agilent drive test system E7473A was used to collect data over a CDMA air inter-
face. A typical data collection system includes a digital RF receiver, a CDMA phone, a
computer, a GPS receiver, and antennas [34]. The Agilent Technologies E7473A drive test

13
system was used to obtain RF coverage and service performance measurements for wireless
communications networks that use IS-95 and J-STD-008 technologies.
The data of interest, collected from the drive test, consisted of latitude and longitude values
at pre-defined measurement time intervals. The most commonly used coordinate system is
the latitude, longitude, and height system. The prime meridian and the equator are the
reference planes used to define latitude and longitude. The coordinates are designated in
the Degree-Minute-Second (DMS) format which can be converted into decimal format using
the following equation:
Decimal = Degrees +Minutes
60+
Seconds
3600. (18)
The geodetic latitude (there are many other defined latitudes) of a point is the angle from
the equatorial plane to the vertical direction of a line normal to the reference ellipsoid. The
geodetic longitude of a point is the angle between the reference plane and a plane passing
through the point, both planes being perpendicular to the equatorial plane.
TABLE I
Sample drive test data.
Longitude Latitude Pilot ID Time
-76.60 39.31 128 36:42.0
-76.60 39.31 108 36:42.0
-76.60 39.31 292 36:42.0
Sample data from the drive test is given in Table I. The GPS latitude and longitude
information of corresponding pilot signal identifiers was collected. The data collected from
the drive test can be converted from the decimal format (18) to two-dimensional cartesian
coordinates (x, y). The resultant coordinates correspond to a local coordinate system with
reference (Lat0, Long0) as the latitude and longitude, in decimal format, of the origin (0, 0)

14
of the local coordinate system. The x and y coordinates are given by
x = 6378137π cos Lat0
180(Long0 − Long) (19)
y = 6378137π
180(Lat− Lat0) (20)
where Lat and Long are the GPS latitude and longitude in decimal format, respectively,
calculated using (18).
B. Validation of AR-1 Model
Using the drive test method, we collected three sets of data containing more than 1200
sample points each. One set of data was collected from a sub-urban area while another test
was performed in a downtown city environment with an orthogonal street layout. The last
test was carried out by a walking subject in the Fairfax campus of George Mason University
(GMU). As given in the previous section, the drive test records the position of the mobile
user using GPS. However, velocity and acceleration can be computed using finite differences
of the position coordinates.
For each data set, training samples of the first 600 data points were used to estimate the
model parameters as given in section III. Figs. 2, 3, and 4 show the performance of the AR-1
model with respect to the real trajectories in suburban, urban, and campus environments,
respectively. The computations and plots were generated using MATLAB. Fig. 2 shows that
the AR-1 model performed very well in the suburban environment where the trajectory was
smoother. The model also did well in the city environment as shown in Fig. 3 even for the
trajectory data beyond the first 600 samples used for training. In both of these cases the
users were in cars driving at typical in-town speeds. Fig. 4 shows that the AR-1 model was
equally effective in modeling the movements of a pedestrian. Our results have validated
that the AR-1 model is capable of accurately representing a wide range of realistic mobile
trajectories.
To validate the adequacy of the AR-1 model in a more quantitative manner, we use the

15
−4000 −3000 −2000 −1000 0 1000 2000−3000
−2000
−1000
0
1000
2000
3000
x coordinate (m)
y co
ordi
nate
(m
)
Actual trajectory and model projection
actualmodel
Fig. 2. Actual and model trajectories for suburban area, driving scenario.
multiple coefficient of determination, denoted R2, and defined by (cf. [35], [36]):
R2 = 1− Σ(si − si)
Σ(si − s), (21)
where si is the actual ith data point (x and y), si is its estimated value from the model, and s
is the sample mean of the actual data. The value of R2 lies in the interval [0, 1]. A value of R2
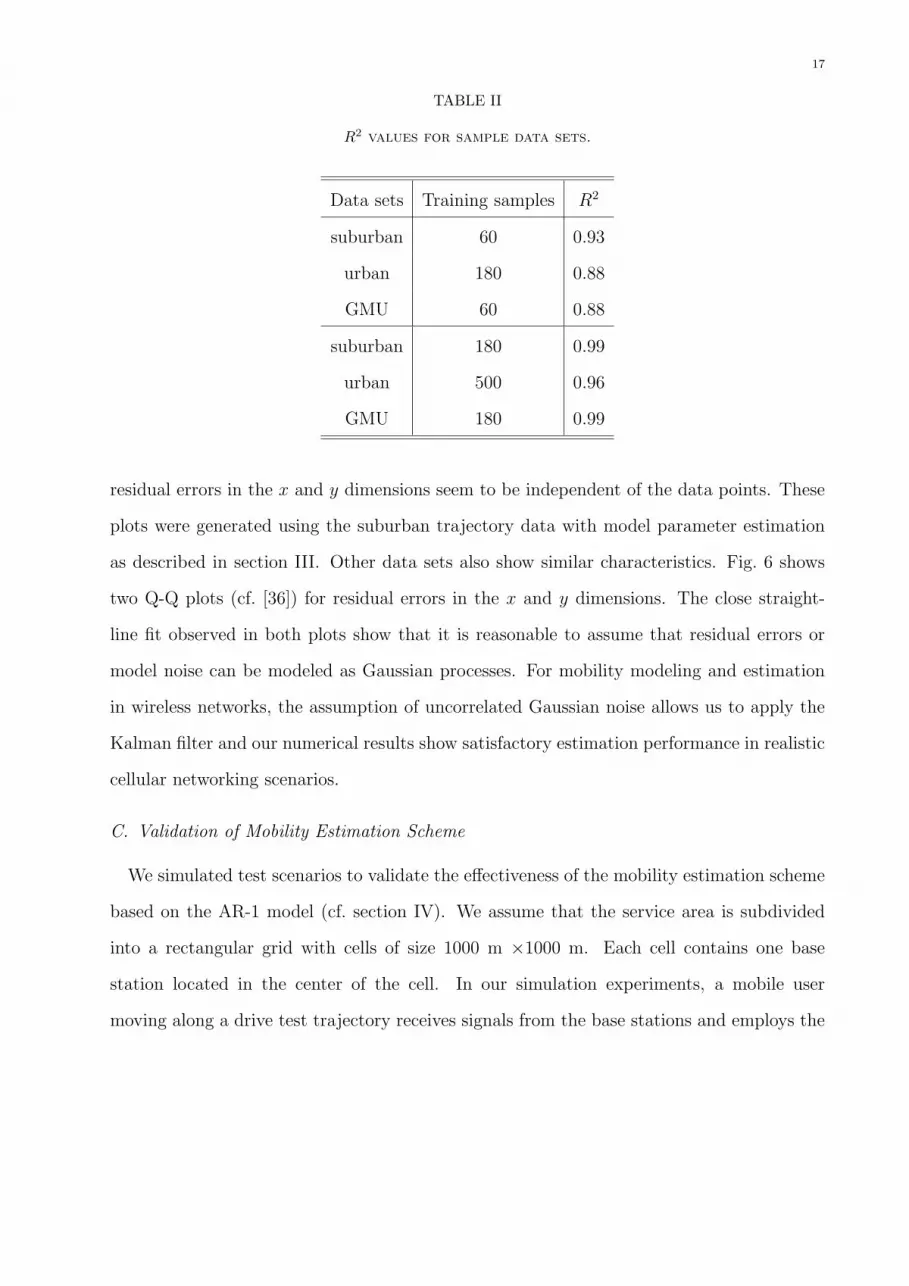
close to 1 indicates a strong model fit. Table II shows the R2 values for the two data sets for
different amounts of training data. Increasing the amount of training data results in better
R2 values. The table shows that AR-1 model captures real mobility scenarios accurately
given a reasonable number of training samples. We also found that using a second-order
autoregressive model did not improve the performance of the model.
The noise term in the AR-1 model is assumed to be zero mean uncorrelated Gaussian
noise. To check the validity of this assumption, we use residual error analysis (cf. [36]). The
residual error for a data point si is defined as ei = si− si. The plots in Fig. 5 show that the

16
1 1.1 1.2 1.3 1.4 1.5 1.6 1.7
x 104
0.95
1
1.05
1.1
1.15
1.2
1.25
1.3
1.35x 10
4
actualmodel
Fig. 3. Actual and model trajectories for urban area, driving scenario.
−100 0 100 200 300 400 500−200
−100
0
100
200
300
400
500
actualmodel
Fig. 4. Actual and model trajectories for GMU, walking scenario.
17
TABLE II
R2 values for sample data sets.
Data sets Training samples R2
suburban 60 0.93
urban 180 0.88
GMU 60 0.88
suburban 180 0.99
urban 500 0.96
GMU 180 0.99
residual errors in the x and y dimensions seem to be independent of the data points. These
plots were generated using the suburban trajectory data with model parameter estimation
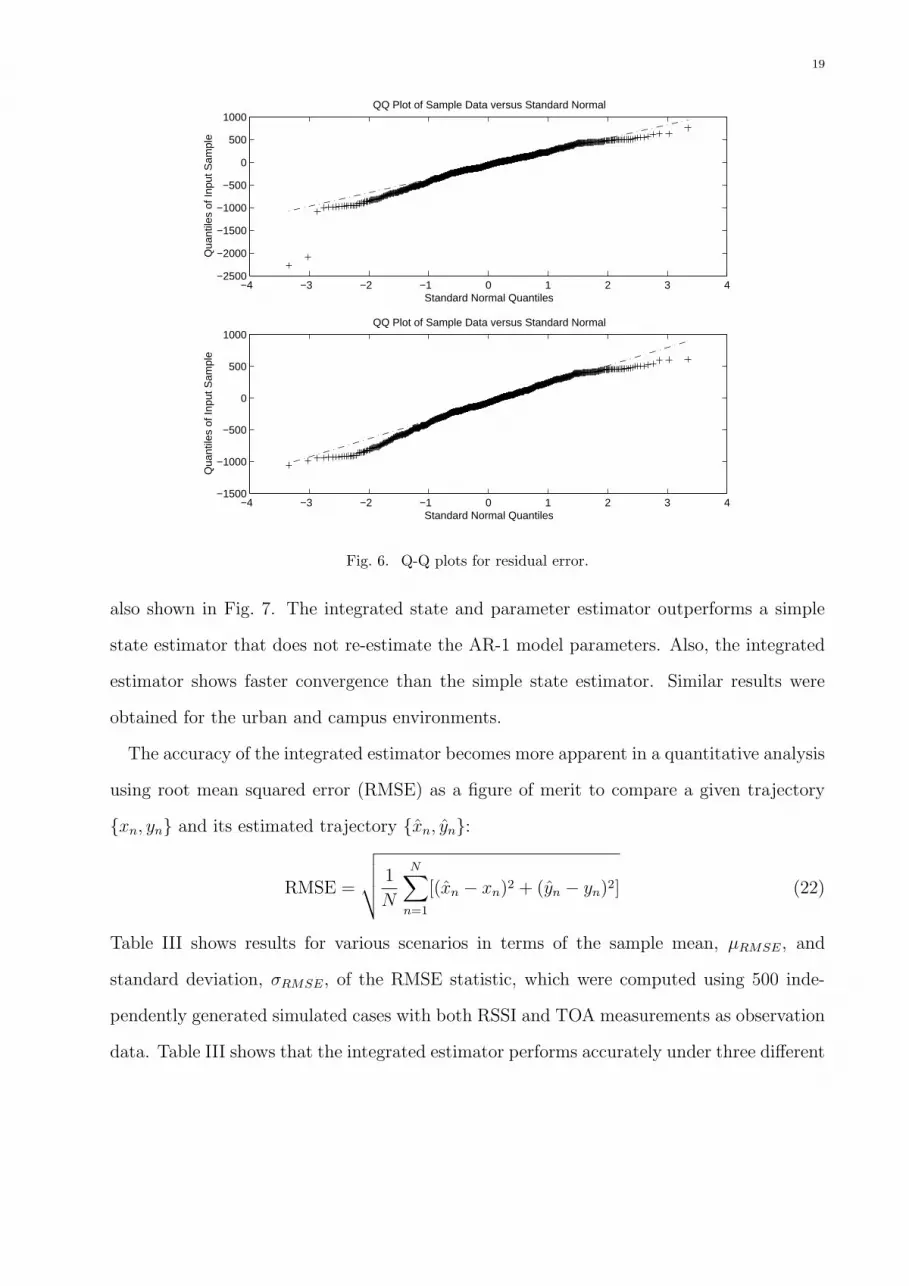
as described in section III. Other data sets also show similar characteristics. Fig. 6 shows
two Q-Q plots (cf. [36]) for residual errors in the x and y dimensions. The close straight-
line fit observed in both plots show that it is reasonable to assume that residual errors or
model noise can be modeled as Gaussian processes. For mobility modeling and estimation
in wireless networks, the assumption of uncorrelated Gaussian noise allows us to apply the
Kalman filter and our numerical results show satisfactory estimation performance in realistic
cellular networking scenarios.
C. Validation of Mobility Estimation Scheme
We simulated test scenarios to validate the effectiveness of the mobility estimation scheme
based on the AR-1 model (cf. section IV). We assume that the service area is subdivided
into a rectangular grid with cells of size 1000 m ×1000 m. Each cell contains one base
station located in the center of the cell. In our simulation experiments, a mobile user
moving along a drive test trajectory receives signals from the base stations and employs the

18
−4000 −3000 −2000 −1000 0 1000 2000−250
−200
−150
−100
−50
0
50
100Residual error vs. data points
x
resi
dual
err
or
−3000 −2000 −1000 0 1000 2000 3000−1000
−500
0
500
1000
y
resi
dual
err
or
Fig. 5. Independence of residual error.
integrated mobility estimator to determine the mobility state as well as the parameters of
the underlying AR-1 model.
The received signals provide two kinds of measurements, i.e., RSSI and TOA. Pilot signal
strengths are generated using (9) and TOA measurements are generated using (13). The
parameter κ is assumed to be zero for all base stations and γ is selected to be 5. Typical values
for the shadowing noise standard deviation, i.e., σφ, range from 4 − 8 dB. The shadowing
standard deviation is taken as 6 dB. The error noise in the TOA measurements is assumed
to be a white Gaussian processes with a standard deviation of ση ≈ 1 µs [33]. A training set
containing 300 data points is used to initialize the AR model.
A representative result from applying the mobility estimator in a suburban area simulation
environment is shown in Fig. 7. The figure shows that the integrated mobility estimator
efficiently computes the mobility model parameters and accurately tracks the mobile. The
estimation results from a simple estimator incorporating extended Kalman filter only are
19
−4 −3 −2 −1 0 1 2 3 4−2500
−2000
−1500
−1000
−500
0
500
1000
Standard Normal Quantiles
Qua
ntile
s of
Inpu
t Sam
ple
QQ Plot of Sample Data versus Standard Normal
−4 −3 −2 −1 0 1 2 3 4−1500
−1000
−500
0
500
1000
Standard Normal Quantiles
Qua
ntile
s of
Inpu
t Sam
ple
QQ Plot of Sample Data versus Standard Normal
Fig. 6. Q-Q plots for residual error.
also shown in Fig. 7. The integrated state and parameter estimator outperforms a simple
state estimator that does not re-estimate the AR-1 model parameters. Also, the integrated
estimator shows faster convergence than the simple state estimator. Similar results were
obtained for the urban and campus environments.
The accuracy of the integrated estimator becomes more apparent in a quantitative analysis
using root mean squared error (RMSE) as a figure of merit to compare a given trajectory
{xn, yn} and its estimated trajectory {xn, yn}:
RMSE =
√√√√ 1
N
N∑n=1
[(xn − xn)2 + (yn − yn)2] (22)
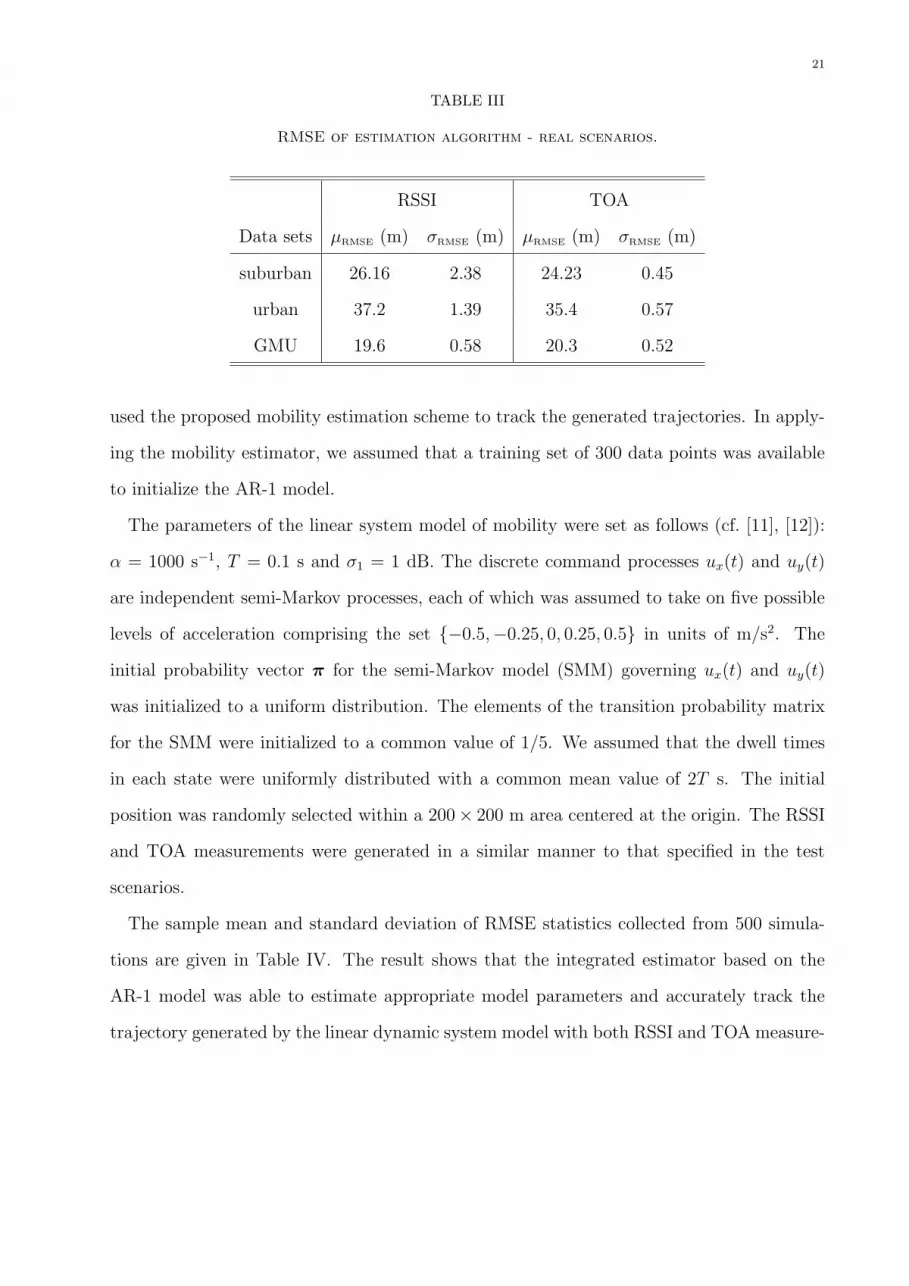
Table III shows results for various scenarios in terms of the sample mean, µRMSE, and
standard deviation, σRMSE, of the RMSE statistic, which were computed using 500 inde-
pendently generated simulated cases with both RSSI and TOA measurements as observation
data. Table III shows that the integrated estimator performs accurately under three different

20
−4000 −3000 −2000 −1000 0 1000 2000−3000
−2000
−1000
0
1000
2000
3000
x coordinate
y co
ordi
nate
Trajectory Estimation
Actualstate+parameter estimationstate estimation
Fig. 7. Comparative performance of integrated estimator for suburban environment.
mobility scenarios. The estimation error in an urban environment was mostly due to the
model parameter estimation. A larger training set yielded better parameter initialization
and hence better performance. Moreover, for lower values of the shadowing noise variance,
the estimation results were even better. It was observed that the use of RSSI and TOA
measurements have similar performance for the given observation parameters in all three
test environments. The difference in performance depends on the accuracy with which the
signal measurements are collected, especially in the case of TOA, and on the accuracy of the
assumed lognormal signal propagation model in the case of RSSI.
D. Comparison with Other Mobility Models
The AR-1 model can accurately represent trajectories generated by other stochastic mo-
bility models. We generated trajectories, containing more than 1000 data points, using the
linear dynamic system model [11], [12] and the random waypoint model [4], [37]. We then
21
TABLE III
RMSE of estimation algorithm - real scenarios.
RSSI TOA
Data sets µRMSE (m) σRMSE (m) µRMSE (m) σRMSE (m)
suburban 26.16 2.38 24.23 0.45
urban 37.2 1.39 35.4 0.57
GMU 19.6 0.58 20.3 0.52
used the proposed mobility estimation scheme to track the generated trajectories. In apply-
ing the mobility estimator, we assumed that a training set of 300 data points was available
to initialize the AR-1 model.
The parameters of the linear system model of mobility were set as follows (cf. [11], [12]):
α = 1000 s−1, T = 0.1 s and σ1 = 1 dB. The discrete command processes ux(t) and uy(t)
are independent semi-Markov processes, each of which was assumed to take on five possible
levels of acceleration comprising the set {−0.5,−0.25, 0, 0.25, 0.5} in units of m/s2. The
initial probability vector π for the semi-Markov model (SMM) governing ux(t) and uy(t)
was initialized to a uniform distribution. The elements of the transition probability matrix
for the SMM were initialized to a common value of 1/5. We assumed that the dwell times
in each state were uniformly distributed with a common mean value of 2T s. The initial
position was randomly selected within a 200× 200 m area centered at the origin. The RSSI
and TOA measurements were generated in a similar manner to that specified in the test
scenarios.
The sample mean and standard deviation of RMSE statistics collected from 500 simula-
tions are given in Table IV. The result shows that the integrated estimator based on the
AR-1 model was able to estimate appropriate model parameters and accurately track the
trajectory generated by the linear dynamic system model with both RSSI and TOA measure-

22
ments. The noise in the linear dynamic system model is correlated since it is a combination
of a semi-Markov process and a white Gaussian process. An interesting observation is that
the AR-1 model with the assumption of uncorrelated noise closely approximates the linear
system model.
We also generated trajectories using the random waypoint model and applied our pro-
posed integrated mobility estimator. The trajectories were generated within an area of
2000× 2000 m, which is centered at the origin. The speed of the mobile unit was uniformly
distributed in the interval [0 60] m/s2 and the mean pause time was assumed to be 1 s.
The random waypoint model tends to generate trajectories with sharp turns, quite different
from realistic mobility patterns. Nevertheless, the integrated mobility estimator was able
to accurately track the trajectory and compute the MMSE parameter values for the AR-1
model (see Table IV).
TABLE IV
RMSE of estimation algorithm - stochastic models.
RSSI TOA
Models µRMSE (m) σRMSE (m) µRMSE (m) σRMSE (m)
Linear system 10.2 7.77 9.86 4.7
Random waypoint 20.1 3.2 20.8 1.3
Our results confirm that the integrated mobility estimator based on the AR-1 model is
indeed a general, efficient and effective scheme to track mobile users in real-time and is also
a useful tool to generate realistic mobility patterns for simulation environments.
VI. Conclusion
We developed an integrated scheme for jointly estimating the mobility parameters and
state of a mobile user in real-time using RSSI or TOA measurements from a wireless network.

23
The mobility estimation scheme was based on a first-order autoregressive model, the AR-
1 model, that allows efficient estimation of the model parameters. The AR-1 model is
relatively simple, yet provides a more accurate representation of realistic mobility patterns
than existing mobility models. Simpler stochastic mobility models such as those based
on random walks or similar types of processes cannot faithfully represent the microscopic
movements of mobile user trajectories. The proposed mobility estimation scheme based on
the AR-1 model provides a viable solution to the two important issues of realistic mobility
modeling and real-time mobility tracking for wireless networks.
The AR-1 mobility model and estimation scheme were validated using three sets of real
data from a CDMA network in urban, suburban, and campus areas. A quantitative analysis
was provided to establish the adequacy of the AR-1 model for realistic networking environ-
ments. Numerical results showed that the integrated parameter and state estimation scheme
performed well using various types of measurement data obtained from typical wireless net-
working environments.
The mobility estimation scheme can be used to enable mobility-aware applications, which
can improve performance or provide new services in wireless networks. In cellular networks,
for example, the mobility estimation scheme could be used to predict cell crossings for
smoother handoffs and more efficient resource allocation [11]. The mobility tracking scheme
could also be adapted for mobile ad hoc networks along the lines of [38], which develops
a distributed mobility estimation algorithm based on the linear system model. Mobility
information provided by such a scheme could be used to improve the performance of mobility
management and routing protocols for ad hoc networks.
ACKNOWLEDGEMENTS
We wish to acknowledge Mohammed Benchaaboune for obtaining the drive test data, which
was used to validate the AR-1 mobility model. This work was supported in part by the
National Science Foundation under CAREER Award Grant ACI-0133390 and Grant CCR-
0209049.

24
Appendix
The matrix Hn in equation (17) is given by
Hn = (h′n,1, · · ·h′n,m)′, (23)
where hn,i is the ith row of Hn for i = 1, 2, 3.
1. For RSSI:
hn,i =−10γ
(dn,i)2(xn − ai, 0, 0, yn − bi, 0, 0) (24)
where i = 1, 2, 3.
2. For TOA:
hn,i =1
c(dn,i)(xn − ai, 0, 0, yn − bi, 0, 0) (25)
where i = 1, 2, 3.
References
[1] C. Bettstetter, “Smooth is better than sharp: A random mobility model for simulation of wireless networks,” in
Proc. of ACM MSWiM, pp. 19–27, July 2001.
[2] T. Camp, J. Boleng, and V. Davies, “Survey of mobility models for ad hoc network research,” Wireless Commu-
nication and Mobile Computing (WCMC), Special issue on Mobile Ad Hoc Networking, vol. 2, no. 5, pp. 483–502,
2002.
[3] I. F. Akyildiz, Y. B. Lin, W. R. Lai, and R. J. Chen, “A new random walk model for PCS networks,” IEEE
Journal of Selected Areas in Communications, vol. 18, no. 7, pp. 1254–1260, 2000.
[4] D. Johnson and D. Maltz, “Dynamic source routing in ad hoc wireless networks,” Mobile Computing, vol. 353,
1996.
[5] H. Stark and J. W. Woods, Probability and Random Processes with Applications to Signal Processing. Englewood
Cliffs, NJ 07632: Prentice Hall, 3rd ed., 2001.
[6] B. Liang and Z. J. Haas, “Predictive distance-based mobility management for multidimensional PCS networks,”
IEEE/ACM Trans. on Networking, vol. 11, no. 5, pp. 718–732, 2003.
[7] H. Kobayashi, S. Z. Yu, and B. L. Mark, “An integrated mobility and traffic model for resource allocation in
wireless networks,” in Proc. of 3rd ACM Int. Workshop on Wireless Mobile Multimedia, (Boston), pp. 39–47,
August 2000.
[8] J. Yoon, M. Liu, and B. Noble, “Random waypoint considered harmful,” in Proc. of IEEE INFOCOM ’03, vol. 2,
pp. 1312–1321, March 2003.

25
[9] J. Yoon, M. Liu, and B. Noble, “Sound mobility models,” in Proc. of ACM MOBICOM ’03, pp. 205–216,
September 2003.
[10] A. Jardosh, E. M. Belding-Royer, K. Almeroth, and S. Suri, “Towards realistic mobility models for mobile ad
hoc networks,” in Proc. of ACM MOBICOM ’03, pp. 217–229, September 2003.
[11] T. Liu, P. Bahl, and I. Chlamtac, “Mobility modeling, location tracking, and trajectory prediction in wireless
ATM networks,” IEEE J. Selected Areas in Comm., vol. 16, pp. 922–936, August 1998.
[12] B. L. Mark and Z. R. Zaidi, “Robust mobility tracking for cellular networks,” in Proc. of IEEE ICC ’02, vol. 1,
pp. 445–449, May 2002.
[13] Z. Yang and X. Wang, “Joint mobility tracking and hard handoff in cellular networks via sequential Monte Carlo
filtering,” in Proc. of IEEE INFOCOM ’02, vol. 2, pp. 968–975, June 2002.
[14] M. Hellebrandt and R. Mathar, “Location tracking of mobiles in cellular radio networks,” IEEE Trans. on
Vehicular Technology, vol. 48, pp. 1558–1562, Sept. 1999.
[15] R. G. Brown and P. Y. Hwang, Introduction to Random Signals and Applied Kalman Filtering. New York: John
Wiley & Sons, 3rd ed., 1997.
[16] J. Kempf, J. Wood, and G. Fu, “Fast mobile IPv6 handover packet loss performance,” in Proc. of IEEE Wireless
Networking and Communications Conference (WCNC ’03), (New Orleans, LA), March 2003.
[17] Y. Gwon, G. Fu, and R. Jain, “Fast Handoffs in Wireless LAN Networks Using Mobile Initiated Tunneling
Handoff Protocol for IPv4 (MITHv4),” in Proc. of IEEE WCNC 2003, (New Orleans), pp. 1248–1252, March
2003.
[18] X. Hong, M. Gerla, G. Pei, and C. C. Chiang, “A group mobility model for ad hoc wireless networks,” in Proc.
of ACM MSWiM, pp. 53–60, August 1999.
[19] D. Lam, D. C. Cox, and J. Widom, “Teletraffic modeling for personal communication services,” IEEE Commu-
nications Magazine, vol. 35, pp. 79–87, October 1997.
[20] T. Tugcu and C. Ersoy, “Application of a realistic mobility model to call admission in DS-CDMA cellular
systems,” in Proc. of IEEE VTC ’01, pp. 1047–1051, 2001.
[21] J. Scourias and T. Kunz, “An activity-based mobility model and location management simulation frameworks,”
in Proc. of ACM MSWiM, pp. 61–68, August 1999.
[22] J. S. Lim and A. V. Oppenheim, Advanced Topics in Signal Processing. Englewood Cliffs, NJ 07632: Prentice
Hall, 1987.
[23] J. J. Caffery Jr., Wireless Location in CDMA Cellular Radio Systems. Norwell, Massachusetts: Kluwer Academic
Publishers, 1999.
[24] P. Deng and P. Z. Fan, “An AOA assisted TOA positioning system,” in Proc. of WCC-ICCT ’00, vol. 2,
pp. 1501–1504, 2000.
[25] L. Cong and W. Zhuang, “Hybrid TDOA/AOA mobile user location for wideband CDMA cellular systems,”
IEEE Trans. on Wireless Communications, vol. 1, pp. 1439–1447, July 2002.
[26] N. J. Thomas, D. G. M. Cruickshank, and D. I. Laurenson, “Performance of a TDOA-AOA hybrid mobile
location system,” in Proc. of Second Int. Conf. on 3G Mobile Comm. Technologies, 2001, pp. 216 –220, 2001.

26
[27] Y. Jeong, H. You, W. C. Lee, D. Hong, D. H. Youn, and C. Lee, “A wireless position location system using
forward pilot signal,” in Proc. of IEEE VTC ’00, pp. 1354–1357, 2000.
[28] A. Abrardo, G. Benelli, C. Maraffon, and A. Toccafondi, “Performance of TDOA-based radiolocation techniques
in CDMA urban environments,” in Proc. of IEEE ICC ’02, pp. 431–435, May 2002.
[29] K. C. Ho and Y. T. Chan, “Solution and performance analysis of geolocation by TDOA,” IEEE Trans. on
Aerospace and Electronic Systems, pp. 1311–1322, October 1993.
[30] B. T. Fang, K. C. Ho, and Y. T. Chan, “Comments on ‘Analysis of geolocation by TDOA’ ,” IEEE Trans. on
Aerospace and Electronic Systems, vol. 31, pp. 510 –511, January 1995.
[31] G. Yost and S. Panchapakesan, “Automatic location identification using a hybrid technique,” in Proc. of IEEE
VTC ’98, pp. 264–267, 1998.
[32] G. L. Stuber, Principles of Mobile Communication. Massachusetts: Kluwer Academic Publishers, 2nd ed., 2001.
[33] H. C. So and E. M. K. Shiu, “Performance of TOA-AOA hybrid mobile location,” IEICE Trans. on Fundamentals,
vol. E86-A, pp. 2136–2138, August 2003.
[34] “E7473A Drive Test System, Data Sheet,” Agilent Technologies, February 2001.
[35] W. Mendenhall and T. Sincich, Statistics for the Engineering and Computer Sciences. San Francisco, CA 94133:
Dellen Publishing Co., Macmillan Inc., 1988.
[36] R. A. Johnson and D. W. Wichern, Applied Multivariate Statistical Analysis. Upper Saddle River, New Jersey:
Prentice Hall, 2002.
[37] J. Broch, D. A. Maltz, D. B. Johnson, Y. C. Hu, and J. Jetcheva, “A performance comparison of multi-hop
wireless ad hoc network routing protocols,” in Proc. of ACM Mobicom, pp. 85–97, October 1998.
[38] Z. R. Zaidi and B. L. Mark, “A mobility tracking model for wireless ad hoc networks,” in Proc. of IEEE WCNC
’03, vol. 3, pp. 1790–1795, March 2003.





























